 Gal A. Kaminka*
Gal A. Kaminka* Yinon Douchan
Yinon Douchan- Department of Computer Science, Gonda Brain Research Center, and Nanotechnology Center, Bar Ilan University, Ramat Gan, Israel
Introduction: Inspired by natural phenomena, generations of researchers have been investigating how a swarm of robots can act coherently and purposefully, when individual robots can only sense and communicate with nearby peers, with no means of global communications and coordination. In this paper, we will show that swarms can perform better, when they self-adapt to admit heterogeneous behavior roles.
Methods: We model a foraging swarm task as an extensive-form fully-cooperative game, in which the swarm reward is an additive function of individual contributions (the sum of collected items). To maximize the swarm reward, previous work proposed using distributed reinforcement learning, where each robot adapts its own collision-avoidance decisions based on the Effectiveness Index reward (EI). EI uses information about the time between their own collisions (information readily available even to simple physical robots). While promising, the use of EI is brittle (as we show), since robots that selfishly seek to optimize their own EI (minimizing time spent on collisions) can actually cause swarm-wide performance to degrade.
Results: To address this, we derive a reward function from a game-theoretic view of swarm foraging as a fully-cooperative, unknown horizon repeating game. We demonstrate analytically that the total coordination overhead of the swarm (total time spent on collision-avoidance, rather than foraging per-se) is directly tied to the total utility of the swarm: less overhead, more items collected. Treating every collision as a stage in the repeating game, the overhead is bounded by the total EI of all robots. We then use a marginal-contribution (difference-reward) formulation to derive individual rewards from the total EI. The resulting Aligned Effective Index
Discussion: While the theoretical analysis clarifies both assumptions and gaps with respect to the reality of robots, experiments with real and simulated robots empirically demonstrate the efficacy of the approach in practice, and the importance of behavioral (decision-making) diversity in optimizing swarm goals.
1 Introduction
Distributed multi-robot systems comprise multiple robots, each under its own control (Farinelli et al., 2004; Parker, 2008). Typically, the robots are deployed to carry out tasks toward a global goal. Examples include coverage (Agmon et al., 2008a; Hazon and Kaminka, 2008; Yehoshua et al., 2016; Giuggioli et al., 2016; Rekleitis et al., 2008); patrolling (Sempe and Drogoul, 2003; Elmaliach et al., 2007; Elmaliach et al., 2008; Agmon et al., 2008b; Elmaliach et al., 2009; Basilico et al., 2009; Marino et al., 2009; Jensen et al., 2011; Portugal and Rocha, 2013; Yan and Zhang, 2016); formation maintenance (Kaminka and Glick, 2006; Kaminka et al., 2008; Michaud et al., 2002; Fredslund and Mataric, 2002; Desai, 2002; Desai et al., 1998; Kaminka et al., 2013; 2016; Balch and Arkin, 1998; Lemay et al., 2004; Michael et al., 2008); multi-agent path planning (Yu and Lavalle, 2015; Sharon et al., 2015; Stern et al., 2019) or navigation (Fox et al., 1997; van den Berg et al., 2011; Snape et al., 2011; van den Berg et al., 2008; Guy et al., 2010; Bouraine et al., 2014); order picking (Wurman et al., 2008; Hazard and Wurman, 2006); sustainable agricultural foraging (Song and Vaughan, 2013); and more (Kaminka et al., 2010).
Necessarily, the robots share resources (at the very least, the space of their work area), and thus, a fundamental challenge is the challenge of multi-robot coordination. As robots cannot act completely independent of others, they must coordinate their actions with other robots in order to avoid and resolve conflicts over resource use. Such coordination necessarily introduces some overhead into the workings of the robots, either by design or by ad hoc necessity.
Multi-robot coordination, therefore, both supports and competes with the achievement of the goals of the robots. Managing the coordination is a necessary component of multi-robot systems and can be done in a variety of ways. Distributed approaches that rely on joint decision-making by the robots [e.g., Gage, 1992; Parker, 1998; Kaminka and Frenkel, 2005; Xu et al., 2005; Zlot and Stentz, 2006; Vig and Adams, 2006; Kaminka and Frenkel, 2007; Kaminka et al., 2007; Dias and Stentz, 2000; Dias et al., 2004; Gerkey and Mataric, 2002; Gerkey and Matarić, 2004; Goldberg et al., 2003; Farinelli et al., 2006; Parker and Tang, 2006; Tang and Parker, 2007; Liemhetcharat and Veloso, 2013; Sung et al., 2013] require high communication availability and the capability of robots to assess not just their own state but also those of others. When such high-bandwidth communications are possible, these approaches can be very effective.
Under settings in which communications are limited in bandwidth and range (e.g., as the number of robots in a group increases), swarm robotics methods offer a promising approach to manage the coordination between robots. Here, robots necessarily coordinate ad hoc and locally, with little or no communications (Hamann, 2018; Hénard et al., 2023). Swarm robotics approaches have been applied various tasks, some similar to those discussed above: coverage (Batalin and Sukhatme, 2002; Osherovich et al., 2007); foraging (Goldberg and Matarić, 1997; Rybski et al., 1998; Balch, 1999; Vaughan et al., 2000; Zuluaga and Vaughan, 2005; Rosenfeld et al., 2008; Kaminka et al., 2010; Douchan and Kaminka, 2016; Douchan et al., 2019); and flocking, formation maintenance, and collective motion (Balch and Hybinette, 2000; Mataric, 1994; Moshtagh et al., 2009; Bastien and Romanczuk, 2020).
With few exceptions (see Section 2 for a discussion), swarm robotics research has investigated settings in which swarms are homogeneous; every robot has the same capabilities as others. Ignoring stochastic elements in perception, actuation, and decision-making components, different robots would respond in an identical manner, given the same local state in which they find themselves.
In this paper, we show how swarms can perform better when they self-adapt and specialize so that their behavioral roles become heterogeneous: given the same settings, different robots in the swarm learn to respond differently.
We focus on spatial coordination in swarm foraging. This is a canonical task for swarm robotics researchers, with many practical applications (see Section 2). We may model this task as an extensive-form fully cooperative game, in which the swarm goal is an additive function of individual contributions (collected items) (Kaminka et al., 2010). As robots cannot share the same spot at the same time and must avoid and resolve collisions, they must coordinate spatially, acting so as to not collide and continue their task normally if a collision occurs. Theoretically, if robots could predict future collisions and their effects, they could use such a model to make optimal collision-avoidance decisions. In practice, individual robots cannot coordinate or communicate globally and, thus, cannot select actions that are optimal for the swarm as a whole.
To compensate for missing global information, Kaminka et al. (2010) presented a multi-agent independent-learner reinforcement learning approach, where a reward function, called the effectiveness index (EI), uses only local information: the time between collisions, which is easily measured by each robot independently. Robots can individually and independently use EI to adapt their collision-avoidance strategies, dynamically diversifying their behavioral responses.
Unfortunately, although the use of EI proved effective in some cases, its effectiveness is brittle (as we show). All too often, robots learned policies that minimize their individual time spent on collisions (improving their own EI rewards) but at the expense of others. This degraded the performance of the swarm as a whole. In such cases, the individual and collective utilities are said to be mis-aligned.
To address this, we re-examine how swarm-wide (global) utility is related to individual actions. First, we show that the total coordination overhead of the swarm (total time spent on collision avoidance, rather than foraging per se) is directly related to the total utility of the swarm: the less collective overhead, the more items collected. Then, we transform the extensive-form game to a fully cooperative repeated game with an unknown horizon. Treating every collision as a stage in the repeating game, we show that this collective overhead is bounded by the total EI of all robots over all stages. These two results are conjectured, but unproven, in previous work.
We then derive an aligned individual reward function, called the aligned effective index
The results show that in the general case, the swarm as a whole achieves maximal results when its members become specialized through learning, i.e., they become behaviorally diverse: their responses to potential collisions differ, and it is that diversity that achieves maximal results. This conclusion complements those of others, investigating mechanical diversity or capability diversity in swarms (Dorigo et al., 2012; Kaminka et al., 2017; Berumen et al., 2023; Adams et al., 2023).
This paper is organized as follows: Section 2 provides background and motivation for the foraging the task, as well as a review of related work; Section 3 details the theoretical model; Section 4 discusses its approximation in the reality of robotics in practice; Section 5 presents the results from extensive simulation and real robot experiments; and Section 6 concludes with a discussion on the implications and scope of the work.
2 Motivation and background
We discuss the background and context for this study. First, we motivate the focus on multi-robot swarm foraging and commercial variants in Section 2.1. We then present a view of swarm foraging from the perspective of the single swarm member (Section 2.2). This allows us to place previous and existing work in context and also to present the opportunity for using learning for improving foraging. Section 2.3 focuses on investigations of this opportunity and their relation to the techniques reported here.
2.1 Swarm foraging: an exemplary swarm task
The motivation for our work arises from the scientific study of a canonical multi-robot task: foraging (Balch, 1999; Winfield, 2009; Zedadra et al., 2017; Lu et al., 2020). This is a task where a group of robots is deployed to repeatedly search for objects of interest (items) and, when found, for transporting them to one or more collection points (homes). Foraging is a canonical multi-robot problem because it raises challenges in multiple aspects of multi-robot systems:
• Management of communications between robots, e.g., with respect to where items may be found. Communications are often non-existent or limited in range and bandwidth; they may be stigmergic, as in the case of ant trail pheromones.
• Effects of population changes (robot death/birth) and various types of individual failures.
• Scalability of methods as groups grow in size
• Collision handling and avoidance as robots inevitably crowd around home locations and sometimes in areas with high item density.
We cannot do justice to a full survey of multi-robot coordination, even if we limit ourselves to foraging. Some surveys of interest on swarms in general (Hamann, 2018; Dorigo et al., 2021; Hénard et al., 2023) and foraging in particular (Winfield, 2009; Zedadra et al., 2017; Lu et al., 2020) may be found elsewhere. We discuss the most closely related work below.
Our focus is on a swarm version of foraging, where robots do not rely on communications for coordination and have little knowledge of the state of others other than their bearing within some limited local range. In other words, we assume that robots can find items, transport them, and repeat the process. They can sense the bearing (angle) to others within a limited range so that they may attempt to avoid collisions or resolve them if they occur. Other than this sensing capability, we only assume they have their own internal clocks (which are not globally synchronized), so they may, for instance, measure the time from a previous collision.
The robots have mass and cannot pass through each other, in contrast to theoretical investigations of so-called “particle agents” (Löffler et al., 2023). We make no assumption as to the self-mobility of the items themselves, although in our experiments, the items were static [see the studies by Rosenfeld et al., 2008; Hahn et al., 2020 for examples of foraging while needing to track targets].
Foraging has largely been investigated in settings where transporting an item requires a single robot, and we maintain this assumption here. However, other investigations have broken away from this assumption (and others noted above). Adhikari (2021) and Lee et al. (2022) discussed dynamic robot chains (“bucket brigades”), in which robots pass items from one to the other to avoid congestion, utilizing multiple robots even for a single item. Pitonakova et al. (2014), Ordaz-Rivas et al. (2021), and Ordaz-Rivas and Torres-Treviño (2022) addressed collective transport tasks in foraging, where multiple robots are required in order to move a single object. From this perspective, AVERT (Amanatiadis et al., 2015) is also a related system. It is a four-robot system designed to transport wheeled vehicles by having each robot attaches itself to a wheel, lifting the vehicle and carrying it together.
Almost all investigations of foraging swarms, including ours reported here, are of fully cooperative systems, where robots are assumed to be cooperative, and coordination is a challenge that arises out of their limited capabilities. This assumption stands at the basis of many applications of foraging for physically searching areas (Schloesser et al., 2021; Aljalaud and Kurdi, 2021), search-and-rescue operations (Francisco et al., 2018; Suarez and Murphy, 2011; Pham and Nguyen, 2020), and humanitarian mine clearance (McGuigan et al., 2022). Albiero et al. (2022) surveyed a few dozen investigations of agricultural applications of swarm robotics, of which a large number discuss foraging variants or highly related technologies. Dorigo et al. (2021) examined new application areas for swarms in general, foraging in particular. These include future applications in precision agriculture (e.g., harvesting), industrial monitoring and inspection, civil protection and response to natural disasters, and molecular robotics for medicinal and clinical intervention.
Recent studies break away from the assumption of fully cooperative swarms. They are motivated by future applications of foraging, where robots are self-interested (e.g., manufactured or deployed by different organizations). In such cases, the robots have to be incentivized to cooperate (Van Calck et al., 2023) and coordinate under conditions requiring privacy protection (Ferrer et al., 2021) and proof-of-work (Pacheco et al., 2022).
One specific application of foraging, order picking, is of particular interest here. It is a highly successful commercially significant variant of foraging, where robots collect items in a logistic warehouse, in order to fulfill customer orders (e.g., arriving via the web) (Wurman et al., 2008; Hazard and Wurman, 2006). Automated robotic order picking is one of the key technologies developed by Amazon Robotics, after it was acquired by Amazon in its takeover of Kiva Systems (for 775 million dollars; at the time, Amazon’s second-largest acquisition). This system was built to replace most human labor in a logistics warehouses1. In such settings, robots must engage in spatial coordination, e.g., while moving in the passageways along shelves, or when arriving at the packing stations with the collected items.
Order picking is a complex task and is interesting from a number of different technological perspectives. From a pure swarm perspective, it may be looked at as a form of foraging: robots individually look for items of interest, pick them up, and bring them to a target area. From a centralized control perspective, order picking can be viewed as a particularly challenging continual
From a scientific point of view, both perspectives raise interesting challenges worthy of investigation. Centralized algorithms for planning multi-robot paths can guarantee optimal paths free from collisions. However, such planning is computationally intractable (Yu and Lavalle, 2015; Sharon et al., 2015; Stern et al., 2019). In contrast, swarm methods are simple to deploy and robust to population changes, although typically sacrificing the ability to prevent all collisions. This raises the need for online collision-handling methods, which, in swarm settings, are often myopic and far from optimal. Necessarily, they respond to a collision with little or no ability to consider future collisions and inevitable crowding (e.g., around the target areas).
We observe that regardless of the scientific lens through which we examine order picking, we find that on-board, fully autonomous collision avoidance is a strictly necessary component. There are two reasons for this (Wurman et al., 2008):
• First, human workers may move about the warehouse—neither do they follow trajectories planned for robots (Thrun et al., 2000) nor can they be relied on to avoid collisions in a manner compatible with the robots’ choices. Moreover, human involvement may be needed in other applications as well (Schloesser et al., 2021).
• Second, even under the assumption that a planning algorithm generates perfect trajectories for the robots, and no humans are about, the possibility of electro–mechanical and communication failures (even non-catastrophic failures, such as simply slowing down as battery levels decrease) requires the robots to have on-board collision-avoidance and re-planning capabilities (Simmons et al., 1997).
In reality, therefore, robots deployed for order picking essentially carry out swarm foraging, albeit perhaps more guided in their search for items and when moving toward home. In the early version of the Kiva system, as captured by the alphabet soup simulator published by Kiva engineers, each robot was responsible for its own path-planning and collision-avoidance responses.
2.2 Improving foraging by improving collision avoidance
Figure 1 shows a perspective [also described by Kaminka et al. (2010); Douchan et al. (2019), although using somewhat different terminology] on the execution timeline from the perspective of a single robot engaged in foraging. The robot begins by executing its foraging activity, stopping when a spatial conflict occurs (e.g., a collision is imminent). It then selects a collision-handling method, which executes for a time. When the collision is averted, the robot can switch back to carrying out its foraging until another collision is imminent. This repeats until the robot task is externally terminated (e.g., by the need to recharge). Each interval between collisions is split into two, termed the avoidance time (spent by the robot actively coordinating—shown in gray) and the program time (no need to coordinate; the robot focuses on its task).
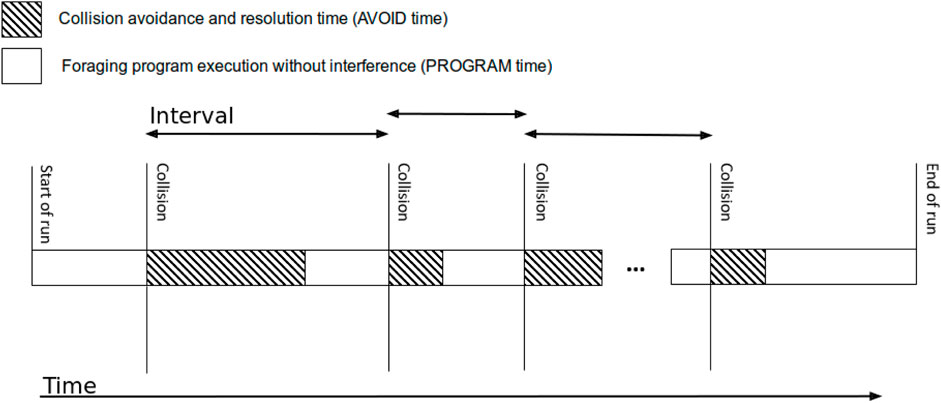
Figure 1. Single robot’s timeline.
This view of the robot’s timeline allows us to position our work with respect to others. First, many foraging methods focus on improving the productivity of the program phase, where the search (for items or home) takes place. This can be done by having robots (i) plan their paths better (Duncan et al., 2022; Cheraghi et al., 2020; Nuzhin et al., 2021; Jin et al., 2020), assuming some localization capabilities, or (ii) communicate information relevant to improving the search (Hoff et al., 2010; Sung et al., 2013; Pitonakova et al., 2014; Alers et al., 2014; McGuigan et al., 2022; Adams et al., 2023; Salman et al., 2024).
A second set of investigations focus on attempting to optimize an entire cycle (avoidance and program), by restricting the behavior of the robot during both program and avoidance such that collisions are minimized, and their resolution is relatively fast. For instance, Schneider-Fontan and Matarić (1998) reported on an algorithm that pre-allocates robots to different territories. Each robot operates in its territory but has the ability to pass objects to another, thus creating a bucket brigade-like structure. They also discussed re-allocating the territories once a robot fails. Goldberg and Mataric (1997) compared several different approaches to this task, measuring the amount of interference between the robots, as a tool for choosing an appropriate approach (see more on interference below).
A third independent direction attempt to shorten the time spent on avoidance so as to free up time for program. The most direct approach here is to improve the collision avoidance algorithm.
Not all collision-avoidance algorithms are a good fit for swarm foraging. For example, algorithms in the reciprocal velocity obstacle (RVO) class of navigation methods (Snape et al., 2011; Guy et al., 2010; van den Berg et al., 2008) plan ahead based on the space of admissible relative velocities to nearby obstacles and robots. They therefore assume knowledge of others’ velocities and shapes—a challenging task in many cases (e.g., when using vision only). To guarantee collision-free paths (within a specific horizon), the optimal reciprocal collision avoidance (ORCA) algorithm (van den Berg et al., 2011) also requires that all agents use ORCA, which fails when humans are involved. In contrast, the passively safe partial motion planning (PassPMP) algorithm (Bouraine et al., 2014) provides some guarantees on collision safety, without making such assumptions. This comes at a cost of non-trivial computation of predicted trajectories.
A related approach, presented by Danassis and Faltings (2018), is called
Other algorithms appear to work relatively well in swarm robots, in practice. However, these offer no guarantees at all. These are essentially reactive algorithms that respond to a collision, with no or very little planning with respect to the task goal of the robot or the group, i.e., these are necessarily myopic algorithms. On the other hand, such algorithms are extremely simple to implement and use (both in practice and from a computational perspective) and are generally task-independent (because they do not use information about the goals of the task).
We use several such myopic algorithms in this research. The dynamic window algorithm (Fox et al., 1997) is a coordination method that uses limited planning in the space of admissible velocities. This method is capable of making decisions based not only on external constraints like obstacles and other robots but also on internal constraints like maximal velocity and acceleration. We use a dynamic window variant as one of the algorithms in the experiments. One reactive algorithm is the noise algorithm presented by Balch and Arkin (1998). Given a collision, the robot repels itself away from the collision, with some directional noise. Rosenfeld et al. (2008) described the repel method. As the name suggests, once a robot collides with another robot, it repels itself backward for an arbitrary time interval or distance.
More sophisticated algorithms introduce stochasticity into the decision-making. A reactive algorithm named aggression was described by Vaughan et al. (2000) and improved by Zuluaga and Vaughan (2005). When robots use this coordination method, the robot with the highest “aggression factor” gets the right of way, while the other backs off.
It is now understood that while each method is effective in some settings, no method is always effective (Rybski et al., 1998; Rosenfeld et al., 2008; Erusalimchik and Kaminka, 2008; Douchan and Kaminka, 2016). The results in foraging show that the swarm-wide utility—the number of collected items of a specific coordination method—depends on the density of the system. For all methods, the system-wide utility declines once some density is reached. However, the density in which this occurs differs from one method to the next. Certainly, some methods do better than others, but none are superior to others in all densities.
The performance of the swarm as the group grows in size mimics the law of marginal returns in economics: adding more robots does not necessarily increase productivity. Goldberg and Mataric (1997) attempted to capture the cause for this, by defining interference, a global signal which varies in the working space of the system denoting how much robots interfere with each other, e.g., due to lack of coordination. Later, Lerman and Galstyan (2002) drew a theoretical connection between interference and task performance. This suggests that if robots act based on the global interference signal, they might improve productivity. The problem is that in practice, this signal cannot be individually computed (as it involves internal measurements from each robot) or made public without communications.
2.3 Learning to coordinate in handling collisions
Inspired by the study of interference and attempting to find a way to use it despite not having access to the global (group-wide) information required, Rosenfeld et al. (2008) showed that in foraging with a fixed group size, areas of high density of robots correlate negatively with group performance. In addition, the higher the cost robots invest on coordination methods the less the group performance will be. They defined the likelihood of collision around a robot as the ratio between the area of a circle of fixed radius around it and the total area robots take inside this circle. They represented the cost of coordination by the combined coordination cost (CCC), a weighted average of all coordination costs of a robot like time and fuel. They showed a strong negative correlation between the CCC and group performance for a fixed group size.
Rosenfeld et al. (2008) then proposed an offline adaptive algorithm for the problem of multi-robot coordination, based on their CCC measure. This algorithm arbitrates between a set of coordination methods by using methods with larger CCC when the likelihood of collision is high and methods with lower CCC when the likelihood of collision is low. It does so by sorting the set of coordination methods from the one with lowest to the one with highest CCC and sets thresholds based on the likelihood of collision to determine what method to choose. The adaptation was done by tuning the aforementioned threshold. They used two separate variants for this adaptation: hill climbing and gradient learning; each one of them tunes the thresholds differently based on the group performance. The CCC measure was not developed theoretically, despite the empirical success of using it as the basis for learning (offline).
More generally, there is much work on utilizing learning to improve multi-robot (and multi-agent) coordination, mostly focusing on multi-agent reinforcement learning, which is often used in the context of planning and decision-making. Indeed, this is the approach we take in this paper: to improve coordination by using learning to adjust which reactive coordination method is to be used in each conflict. We only describe it here in brief and refer the reader to previous studies (Kapetanakis and Kudenko, 2002; Hernandez-Leal et al., 2019; Kober et al., 2013; Zhang et al., 2021; Kuckling, 2023; Fatima et al., 2024) for a deeper explanation. There are several investigations that are closely related to this approach, which we describe below in detail.
Claus and Boutilier (1998) showed different variations of RL techniques in multi-agent domains and the difficulties that arise when using them. They divide learners into two different types: independent learners (IL) and joint-action learners (JAL). ILs learn actions with no knowledge about the actions of other agents, while JALs learn with knowledge about the actions of all other agents. To ground RL use in multi-agent systems, Claus and Boutilier discussed learning in the context of game theory models. They showed that even simple RL algorithms lead to non-intuitive results, depending on the settings of the game. In particular, they examined both IL and JAL agents in several identical-interest matrix games (where, in every action profile, every agent gets the same utility). For both ILs and JALs, they showed that the agents converge to a Nash equilibrium, which is sub-optimal in terms of welfare. They also show that different learning parameters such as the learning rate or exploration rate can make the system converge to different equilibrium points. As we are interested in maximizing the global utility (the group goal), this is a serious challenge, which has been undertaken in many investigations.
Kaminka et al. (2010) attempted to utilize an online adaptation mechanism for the same purpose. They introduced the first version of the reward function we discuss in this paper, the EI. This basic version measured the ratio between the resources (including time) spent in collision avoidance (avoidance time, in Figure 1) and the total resources spent in a single interval between collisions (sum of the avoidance and program time in the interval). Using a stateless Q-learning variant (Claus and Boutilier, 1998) with this basic EI as a reward and using a large learning rate so as to adapt quickly to changing conditions, they demonstrated successful foraging in many different settings. Their experiments revealed that while the robots did not converge to a specific policy (individually, i.e., robots often changed their selected action), their choices are heterogeneous and often lead to improved results (e.g., compared homogeneous policies or random mixed choices).
Despite the empirical success of the EI measurement using reinforcement learning, it comes with no guarantees. Indeed, our research work began by applying the framework to the pick ordering domain, which turned out to be not at all trivial or necessarily successful (Douchan and Kaminka, 2016). We therefore sought to ground the EI in theory and, along the way, developed a more general EI reward function; the EI introduced by Kaminka et al. (2010) is strictly a special case. The general EI introduced in this paper provides guarantees up to explicit assumptions, as well as a thorough discussion of approximation methods that can be used in practice and are motivated by the theory. It adds a component by which the individual agent estimates its effect on the swarm, allowing the general EI reward to align the individual and swarm utilities.
Godoy et al. (2015) described a method using reinforcement learning techniques with ORCA (van den Berg et al., 2011). It improves on either using only ORCA or only reinforcement learning. They presented the ALAN framework that uses a reinforcement signal composed of two factors: a goal-oriented and politeness factor. The goal-oriented factor is based on the direction cosine of the velocity vector of the robot and the displacement vector of the goal from the robot. The politeness factor is based on the vector cosine between the preferred velocity vector, and the vector ORCA will output in the current robot’s situation. The final reinforcement signal for the ALAN framework is a weighted sum of the goal-oriented factor and politeness factor. This work has both similarities and dissimilarities to our work. In a similar manner to our work, this work uses reinforcement learning in order to choose the best action in any given time. However, ALAN can only choose between alternatives within ORCA and does not provide guarantees on performance, as we do here.
Wolpert and Tumer (1999) described the COIN framework, which models multi-agent systems where agents work to maximize global utility but with little or no communications between them. They show that if agents can estimate the wonderful life utility—how the agent’s actions (or lack thereof) impact global utility—then it is possible to use reinforcement learning to improve global utility in a guaranteed manner, in various multi-agent domains (Tumer et al., 2002; Agogino and Tumer, 2008; Wolpert et al., 1999). However, this relies on knowing the global utility and/or the value (payoff) of others’ actions. In practice, this is often not possible, so approximations are made (Tumer et al., 2008; Devlin et al., 2014). In an earlier version of the work reported here (Douchan et al., 2019), we built on the COIN work by showing how to approximate the wonderful life utility in practice, in multi-robot swarm settings. We also briefly discussed a connection to game theory. Here, we extend these results and focus on the heterogeneous nature of the resulting optimal swarms. In addition, necessarily, because we work with physical robots, and given the focus on using timing information, the approximations we take here are different from those made elsewhere; they are discussed in context in the next sections.
3 Swarming in (game) theory
We begin in Section 3.1 by introducing an abstract game-theoretic model of multi-robot tasks carried out by a swarm of robots. We then make incremental modifications to this abstract model, to bring it closer to the reality of physical interacting robots, when the robots cannot communicate (Sections 3.2, 3.3). Finally, in Section 3.4, we address the challenge of learning optimal actions according to the game-theoretic model we introduced. For the benefit of the reader, we include a nomenclature of the symbols in Appendix A.
3.1 Swarm tasks as extensive-form fully cooperative games
When considering the task multiple robots (each engaging in its own coordination method arbitration), we follow Kaminka et al. (2010) in representing the task as an extensive form game between
The root node of the game tree represents the first collision. Given that there are
The actions independently taken by players are coordination methods. The gains (payoffs) from taking them and the costs that they entail differ between robots and between collisions but are theoretically accounted for. Each action takes time.
The next
Each terminal node will hold a vector of numerical values representing the utilities of each robot in the system. As this is a cooperative task, we are interested in the sum of these utilities—in foraging this would translate to the number of items collected by all swarm members, together.
A two-player two-action example of such an extensive-form game is shown in Figure 2. It shows several paths from the root node to the terminal nodes.
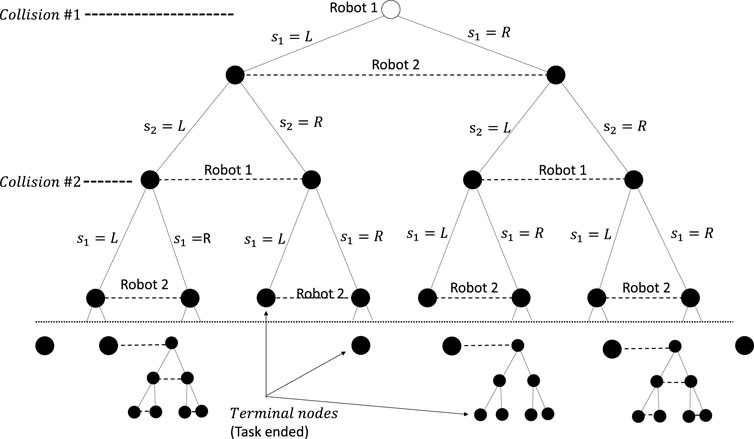
Figure 2. Two-player two-action task run represented as an extensive-form game for the action sets
3.2 From extensive-form game to normal-form games
The extensive-form model of a task run represents every possible outcome of the task run. This is only of theoretical value as no robot—or their designers—can predict the outcome of future collisions, or their timing, or their impact on global payoffs. In reality, robots only know their history of previous collisions, and the immediately imminent collision. Indeed, in swarm settings, robots cannot know of the other robots’ choices (which theoretically affects their own), and thus, even this information is hidden from them.
In order for robots to make decisions based only the history and current collision, we must draw a connection between the global final utility (payoff) theoretically reached using the extensive-form game and the sequence of collisions in which the robots make collision-resolution choices. Robots may then rely on signals that are obtained during a joint collision.
To do this, we take an intermediate step and show how the extensive-form game can be expressed as a sequence of normal-form games, each representing a single joint collision. We define the following symbols (see also nomenclature in Table A1):
•
•
• The cost incurred by robot
• The gain by robot
•
•
•
We start with the most general case where outcomes of a robot at the
We can look at each joint collision as a normal-form (matrix) game representing the outcomes of this collision only, rather than the whole task run. For the
We define the
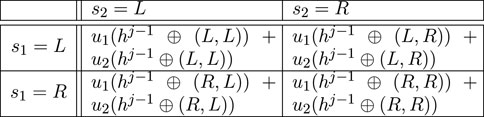
Figure 3. Example of a two-player two-action folded game matrix for the action set
3.3 Global utility and folded matrices
Robots in a system have limited sensing and communication capabilities. They are unable to know the utilities of other robots, even in the same joint action. Indeed, each robot does not even know how its own action affects its own immediate utility. The only information available to a robot is from its own sensors and internal state memory.
In particular, the robot
We formally tie the avoidance and program times of the collision to the utility of the robot resulting from the collision. To do this, we assume that individual gains in avoidance time are zero (since a robot in avoidance time is handling a collision), and therefore, gains occur only in program time:
By definition, Equation 1
3.3.1 Global utility and coordination overhead
Rosenfeld et al. (2008) empirically demonstrated that there is a strong negative correlation between coordination costs (the avoidance time in our case) and swarm performance. The more a robot, or a group of robots, spends time carrying out the task (program time) and less on coordination (avoidance time), the higher is and the higher their performance. Equation 2 formally shows this relationship.
We distinguish productive intervals
Definition 1. The coordination overhead (CO) is the total amount of time the system was in avoidance time divided by the total time invested in the task run:
We show that
Theorem 1. Given the assumptions on the cost and gain,
Proof.
Since
As
This completes the proof. □
As a result of Theorem 1, now it is possible to look at our problem as minimizing
3.3.2 Coordination overhead and the folded matrices
We turn to utilizing the folded matrices as a step toward making it possible for robots to maximize
We follow Kaminka et al. (2010); Douchan and Kaminka (2016) in making a Markovian assumption that for every collision, the outcomes of the robots’ method selection depend only on the current joint action performed and not on the history of all joint actions performed. This means that the outcome of any collision, given a collision-avoidance action
One consequence of this assumption is that instead of the task run being a sequence of different folded-game matrices depending on the history of play, it is now a single game matrix, which is the same for every collision in the task run. In game theory, such a sequence is termed repeating games. As the number of games is not known in advance, these settings are formally known as infinite-horizon repeating games.
Minimizing
Given the above, it makes sense for swarm agents to attempt to individually increase their own
Kaminka et al. (2010) conjectured that individually minimizing
Despite its lacking, the structural similarity between the individual
We draw a connection between
Let the swarm play the joint action
Building on this, we show that for every sequence of joint actions,
Theorem 2. For any number of collisions
Proof.
We re-order the summations:
Defining
Replacing
This completes the proof. □
The step taken in Theorem 1 allows robots, in theory, to use measurements of time instead of global count of items picked (which in a swarm, they cannot possibly achieve). The step taken in Theorem 2 shows that under some assumption, the sequence of collisions can be treated as a repeating game with an infinite-horizon, where each stage is an identical normal-form game. Thus, determining
However, robots cannot know
3.4 Optimal joint actions
We approach the challenge by finding a potential function that turns the normal-form game into a potential game [Monderer and Shapley (1996)]. A potential game is a normal-form game, where, for every player
Potential games hold several important characteristics: First, they always have at least one pure-strategy Nash equilibrium. Furthermore, when players use pure strategies, an improvement in one player’s individual payoff due to changing its individual action will necessarily improve the potential function, i.e., the individual payoff and potential function are aligned. When players choose to maximize their individual payoffs, the system will converge to a pure-strategy Nash equilibrium, which would be at least a local optimum of the potential function.
If the robots play a potential game with potential function
To derive a local aligned reward from
Using
Definition 2. Given a joint action
We derive a bounded closed-form expression of
We observe that one of the components here is actually
Once again, let
Multiplying the first sum by
We remind the reader that we had assumed earlier that collisions are synchronous and involve all agents. This means that the cycle length depends only on the joint action selected and not on any specific robot. Therefore, for all pairs of robots
We note that all the denominators
Theorem 3.
where
Proof. Note that terms using
Case 1. Robot
and we may also assume that its absence shortens the swarm’s avoidance period (the collision resolution was shorter), and thus,
Therefore, continuing from step 7 above,
Adding using the common denominator and using
This yields the left-hand inequality of the theorem.
Case 2. Robot
As the agent is still hypothetically present, the counterfactual cycle length does not change:
Then, continuing from Equation 7 yields
This yields the right-hand inequality of the theorem. Putting it together with the left-hand inequality (Equation 8 above) yields
thus completing the proof. □
We make the following observation with respect to the above derivation of bounds on
Formally, we conjecture that
Proving this conjecture depends on a formal model of the counterfactual removal of a robot from a swarm collision, which is outside the scope of this paper. Lacking such a model, we use
The goal, of course, is for each robot
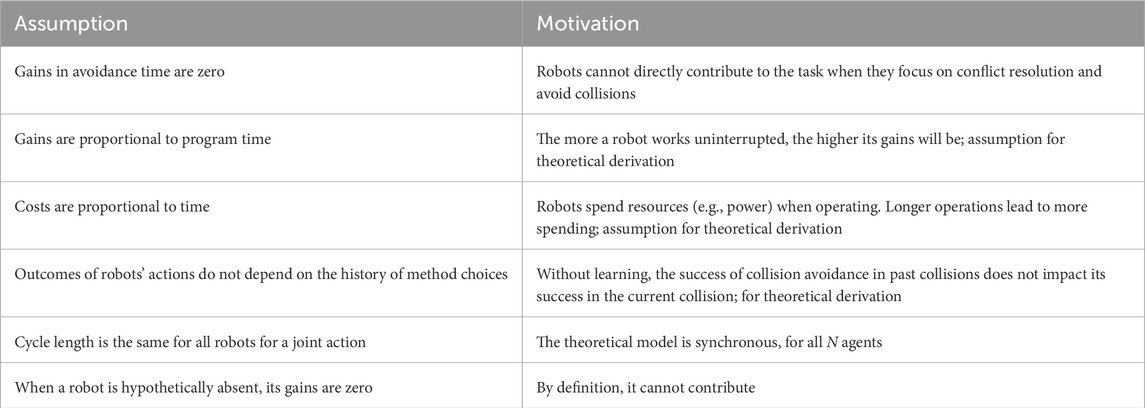
Table 1. Assumptions made in the development of the theoretical model and the motivation for creating them.
4 Swarming in practice, through learning
We now turn to using the derived reward
4.1 Approximating
This practical approximation of
where
As a first step, we impose a structure on the approximation, setting
Next, we propose a number of potential values for
•
• Same for all,
• Average over time,
The last estimate raises the opportunity to utilize the robot’s own experience with the specific action selected as the basis for estimating the effect of the collision on others. Given a history of play
• Average over actions,
• Minimum over actions,
• Maximum over actions,
4.2 Dealing with asynchronous and non-mutual collisions
An important assumption made in the derivation of the theoretical model is that collisions are synchronous to the swarm: all robots are assumed to be involved in every collision. In reality, as swarms grow in size, collisions between robots are asynchronous and may even be non-mutual (some robots physically involved in a collision may not recognize the collision state).
As it turns out, the effects of breaking this assumption in practice are mild. First, when a collision occurs and a robot cannot recognize it, there is nothing this robot can do but continue in its task, in which case it will not learn from the collision. This is compatible with the expectation that if the robot does not recognize the collision, then its effect on it is negligible. If, however, it does recognize a collision, its learning from it depends only on its own estimates of
A potential complication in practice may occur, when a robot taking a collision-resolution action may find itself colliding again with the same or other robots. Once again, however, this is addressed easily. Compatibility with the theoretical model is maintained in such cases by preempting the first collision (essentially, treating the entire cycle leading from the first collision to the new collision as a period of collision avoidance, with
4.3 Varying avoidance and program times
An assumption made in theory is that the outcome of a collision, given a joint action selected, remains the same. However, in practice, this assumption breaks from the point of view of the learning robot. First, the robot does not know the joint action played but only its own individual action, which is only a component in the joint action. Thus, as it chooses the same individual action, it may measure different avoidance and program durations, due to other robots varying their own individual actions, synthesizing different joint actions without its knowledge. Second, the cycle length may vary even for the same joint action due to latent environment variables, which states that the robot is unable to sense directly.
To address this, we propose to use an averaging procedure on
We treat the learning problem as reinforcement learning in semi-Markov decision processes (SMDPs) (Bradtke and Duff, 1994), rather than discrete MDPs. We use the SMDPs to represent discrete sampling of a continuous-time reward and also introduce a Q-Learning variant for SMDPs, called the continuous-time Q-Learning. It differs from Q-Learning in the update step: first, the learning rate
Algorithm 1.Continuous-time Q-Learning.
1: procedure CTQL-UPDATE(
2:
3:
4:
5:
6:
7: end procedure
5 Experiments
We report below on experiments that evaluate swarms utilizing the reinforcement learning using the
Section 5.1 explains the experiment environments (simulation and robots). Then, we present results from experiments utilizing adaption (Section 5.2, and from experiments using learning (Section 5.3). In all sections, we emphasize the role of heterogeneity.
5.1 Experimentation environments
We conducted experiments in two environments: the Alphabet Soup order picking simulator (Hazard and Wurman, 2006) created by Kiva Systems engineers, and the Krembot swarm robots, built by Robotican3. Videos showing the physical in simulated robots and an overview of the evolution of the EI reward are available online on the project’s web page4.
The Alphabet Soup simulator simulates 2D continuous-area order picking by considering the items as letters and orders (combinations of items) as words. Several word stations are positioned in the area, each with a list of words to be composed. Buckets which contain letters, letter stations that are used to re-fill buckets with letters and robots. The robots have three main tasks: the first is to take a bucket to a word station in order to put one letter in this station. The second is to return a bucket to its original position, and the third is to take a bucket to a letter station. Figure 4 shows a screenshot of the simulator in action.
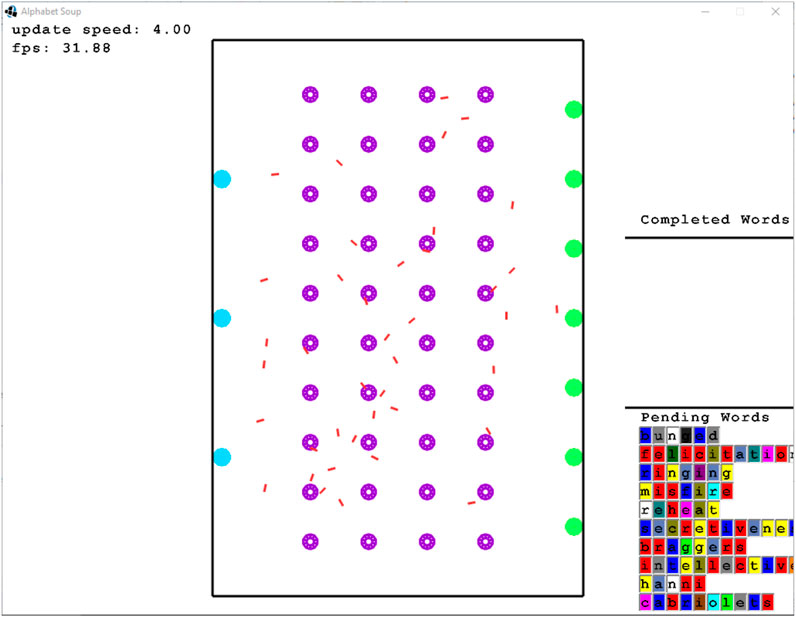
Figure 4. Alphabet Soup simulator. Red lines are the robots, purple circles are the buckets, green circles are the word stations, and cyan circles are the letter stations.
The simulator comes with a centralized task allocation mechanism, which we do not modify. The original collision avoidance mechanism in place is run individually by each robot. It is a reactive heuristic which is a combination of dynamic window (moving towards most vacant direction) and waiting in place for a random amount of time. This mechanism was replaced by an algorithm-selection mechanism, which can choose between various reactive collision-avoidance algorithms, including the original. This choice would be governed by a learning algorithm (as described above) or a different method.
The main measurement of performance for this simulator is the amount of letters placed in word stations in a given amount of time. Unless stated otherwise, each simulation is 10 min long with the last 30 s used for measuring performance and other statistics.
The Krembot robots were used in a variant of multi-robot foraging, where the objective of the robots is to find as many items in a given time. They have relatively limited sensing and processing capabilities. They are cylindrical-shaped robots with a height of 10.5 cm and a diameter of 6.5 cm. Despite their limited sensing capabilities, those robots can detect collisions and also distinguish between a robot and a static object.
The behavior of the robot was controlled by three behavioral states and a few transitions, triggered by specific perceived events. The three states are as follows:
• Wander: Search for a station by randomly wandering over the field. Whenever the robot is in this state, its LED light will be magenta (both red and blue simultaneously).
• Go to homebase: Go to the homebase to retrieve the item after a station was found. When the robot is in this state, its LED light will be blue.
• Resolve conflict: The robot enters this state when it detects an imminent collision with another robot (not a static obstacle). In this state, the robot learns and chooses a reactive coordination method. When the robot is in this state, its LED light will be red.
If a robot detects an imminent collision with a static obstacle, it executes a fixed behavior, unlike with a robot where it executes a coordination method by reactive method arbitration. For each of the three states, there are several transitions from it to other states:
• Wander
• Go to homebase
• Wander/Go to homebase
• Resolve Conflict
Figure 5 shows the environment where experiments with the Krembots were conducted. On the table, the wooden cylinders are the stations where robots gather items from. The arena consisted of a
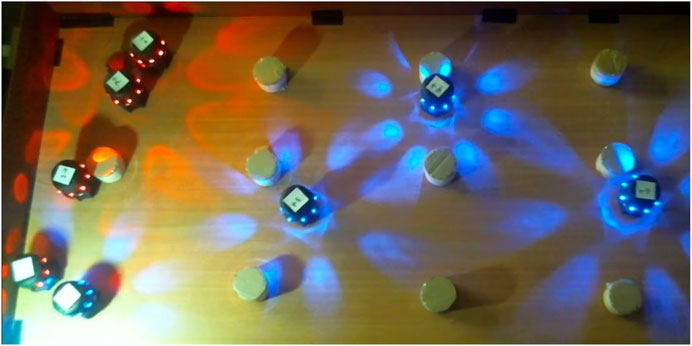
Figure 5. Krembot swarm robots.
5.2 Heterogeneity in adaptation
We distinguish between learning and adaptation. Learning focuses on converging to a policy which consistently chooses the best action for each state. On the other hand, adaptation focuses on rapidly changing between policies, according to what is best now.
Previous work by Kaminka et al. (2010) focused on adaptation. To do this, they used stateless Q-Learning with a very high learning rate (as high as 0.8). This allows the robots to rapidly switch between policies; the robots do not typically converge to a particular preferred choice. The reward function used was the original
We began by evaluating the use of
5.2.1 Adaptation is better in Alphabet Soup
As a first step, we briefly summarize early results evaluating the use of
Douchan and Kaminka (2016) compared the performance of these five basic methods with random selection of methods by each robot, in each collision (a Random selection method), and with an adaptive use of stateless Q-learning (learning rate
Figure 6 shows the results from these experiments. The figure shows that three of the fixed collision avoidance methods (repel, noise, and aggression) are inferior to the others. These three are behaviorally homogeneous swarms: all robots use the same collision-avoidance methods. Of the four top performers (not necessarily statistically distinguishable), three are behaviorally heterogeneous: the Random method, by definition, has every robot change its selected collision-avoidance method with every collision, independently of other robots; the Original method stochastically switched between best-evade and noise; the EI method is the adaptive method using the original
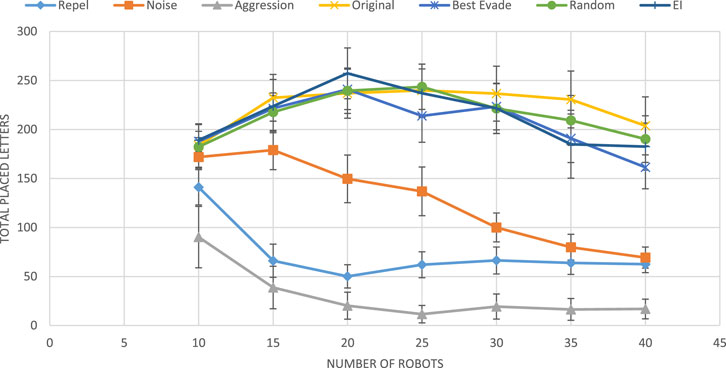
Figure 6. Results obtained by Douchan and Kaminka (2016). The horizontal axis marks the group size, and the vertical axis represents the group performance in terms of total placed letters.
Intrigued by these results, we used the Alphabet simulator to directly evaluate the level of heterogeneity of the swarm and its effect on performance, especially in relation to the use of the EI reward. Fixing the group size to 20, we focused on the only homogeneous method that proved to perform well in the experiments reported above: best evade. We allowed each robot to select between two variants of this method: Best evade for 20 ms (BE20) and best evade for 2000 ms (BE 2000).
We then evaluated four configurations of the robots selections: in the individual mix configuration, each of the robots, when entering a collision, chooses BE20 with probability
Figure 7 shows the performance of the two configurations as a function of the fraction of BE20 in Alphabet Soup as
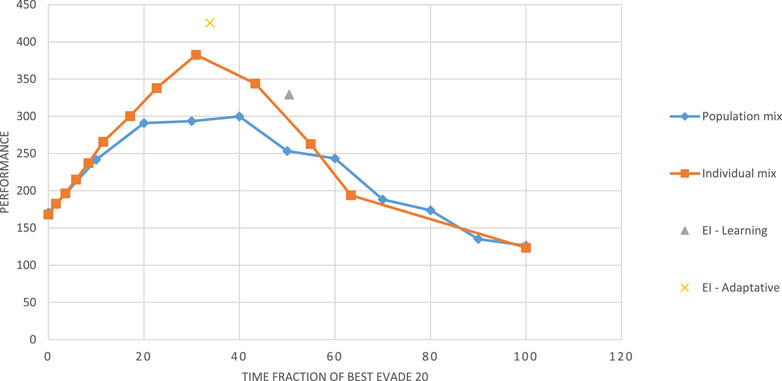
Figure 7. Swarm performance as a function of the heterogeneity of the swarm (time fraction of BE20,
The figure also shows two specific performance points, resulting from the application of reinforcement learning with the
5.2.2 Adaptation is not always better in Krembots
We now turn to testing the role of adaptation and learning with real robots, hoping to draw lessons as to the role of heterogeneity in these different settings. We test two coordination methods of the same type but with different time parameters (the speed of the robots is different, and so these were empirically determined): Best Evade for 500 ms (BE500) and Best Evade for 10,000 ms (BE10000). We first test each method separately and then perform test selection using EI-Adaptation (learning rate
We tested the performance of the different configurations in four robots and eight robots. We measure the performance of each configuration and the time fraction the robots spent on BE500. The duration of each run is 1 h long. For each hour-long run, we logged each event, such as a collision or an item that was retrieved. From this log, we extracted statistics on the number of items retrieved and the coordination method choices of the robots. We extracted statistics based only on the last 15 min of the run since we want the learning to stabilize. As before, this allows controlling the heterogeneity of the swarm by fixing the fraction of BE500 or assessing it from the logs.
Figure 8 shows the results for 4 Krembot robots (top) and for Figure 8 (bottom). Like the previous figure, the horizontal axis measures the fraction of the time, in which the robots spent using BE500, i.e., the behavioral heterogeneity of the swarm: The 0 point on this axis marks a homogeneous swarm that never uses BE500 and instead always uses BE10000. The point marked 100 on this axis shows the results for another homogeneous swarm, where all robots use BE500.
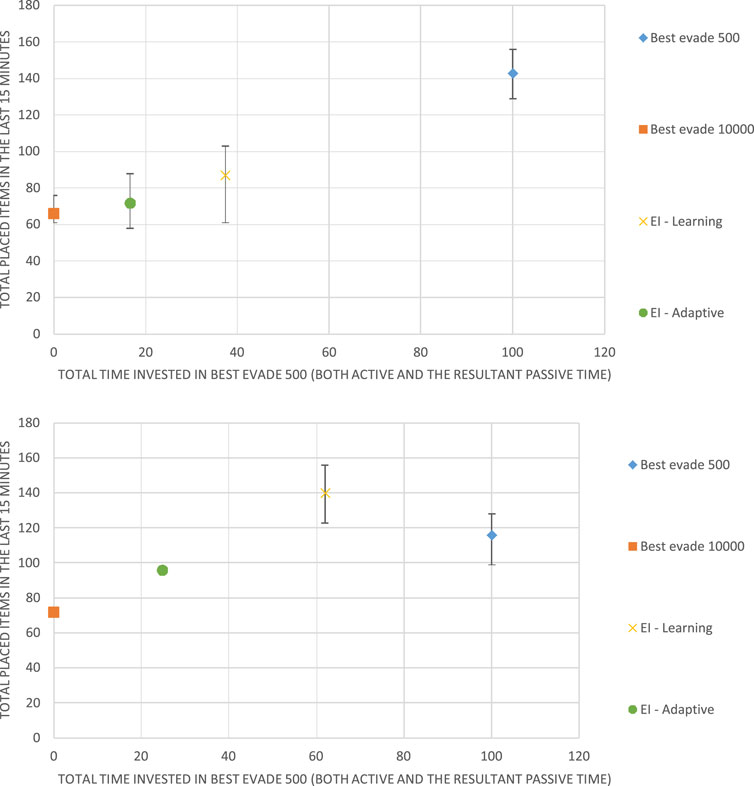
Figure 8. Results for Best Evade 500 (BE500) and Best Evade 10,000 with four (top) and eight (bottom) Krembot robots, respectively. The horizontal axis marks the fraction of BE500 used. The vertical axis marks the group performance in terms of total retrieved items.
Figure 8 shows that in the case of 4 robots (top), the best-performing swarm is a homogeneous swarm (all robots choose BE500 collision-avoidance). Both EI-Adaptive and EI-Learning fail to achieve equivalent performance. However, in the case of 8 robots, a heterogeneous swarm is the best method, and it is achieved using EI-Learning (where about 50% of the robots choose BE500). Here, while heterogeneity proves superior, it is achieved by learning using regular Q-Learning, rather than the adaptive method proposed by Kaminka et al. (2010).
5.3 Heterogeneity in learning
As the use of learning does not seem to work stably, we explore it further. In learning, robots converge to a fixed policy. We compare regular Q-Learning to continuous time Q-Learning. We do so by measuring the performance of different WLU approximations (Section 4.1), each with regular Q-Learning and continuous time Q-Learning (Algorithm 1, Section 4.3). The parameters of regular Q-Learning were set as follows: the learning rate was 0.05, and the exploration rate was 0.02. The parameters of continuous time Q-Learning are as follows:
We begin again with the Alphabet Soup simulator, with the action set containing two actions as before: BE20 and BE 2000. Figure 9 shows the results when using regular Q-Learning (top) and continuous-time Q-Learning (bottom). The line shows the population-mix, as before. The top figure shows EI learning being superior to all others (as in Figure 7). The bottom figure shows the Minimum over actions being superior. We draw two lessons from these results. First, regardless of the learning method and assumptions, the top performing swarm is always a heterogeneous swarm. Second, the algorithm used is sensitive to the selected
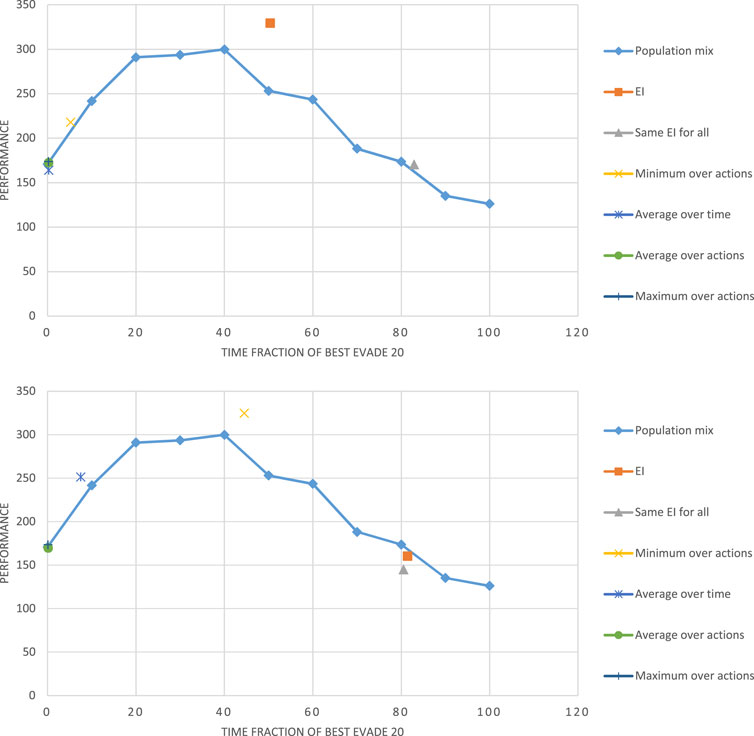
Figure 9. Performance of different WLU approximations with regular Q-learning (upper chart) vs. with continuous time Q-learning (lower chart) and where they are relative to the population mix.
Finally, we go back to the Krembot robots to evaluate the use of the learning algorithms, with different rewards and both adaptive and learning parameters. We tested BE500 and BE10000 with EI (Kaminka et al., 2010) using the same Q-Learning parameters for learning (EI-learning) and adaptation (EI-Adpative). We also evaluate the use of EI with the continuous-time Q-Learning algorithm (Algorithm 1) and, alternatively, the use of the minimum-over-actions approximation with the same algorithm. Its parameters were set to
Figure 10 shows the results. For four robots, as before, a homogeneous swarm (everyone uses BE500) is the best. It is good to see, however, that the use of Algorithm 1 with EI comes very close to its performance. Indeed, it results in a heterogeneous swarm where 95% of robots select BE500. Given the exploration rate and the fact that there are only two methods, this corresponds to exactly the 5% of the time where the exploration rate forces the robot to choose BE10000. The bottom figure shows that all best swarms are heterogeneous.
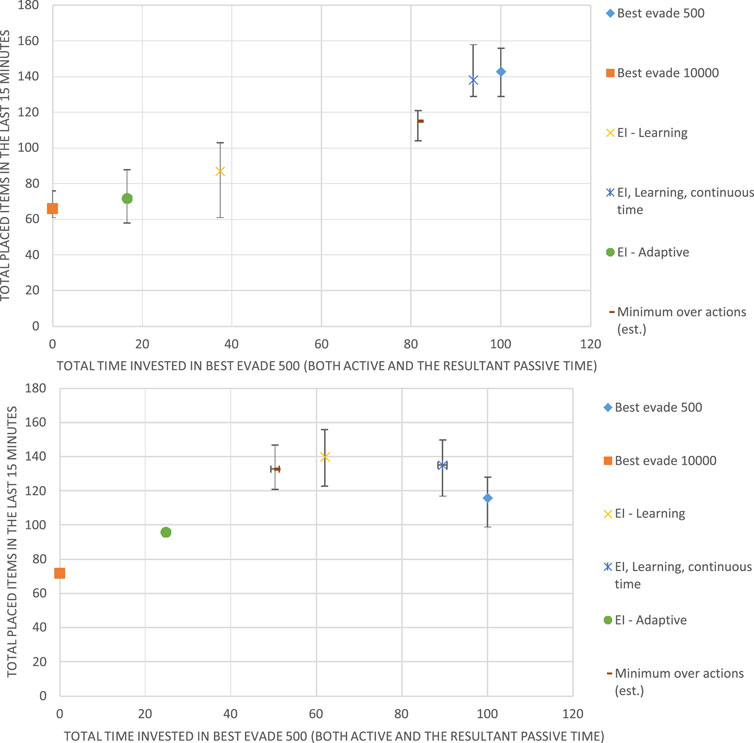
Figure 10. Learning in Krembots for four robots (upper chart) and eight robots (bottom chart).
In a different publication, Douchan et al. (2019) reported on additional experiments utilizing the learning methods we presented, contrasting their results with those achieved by testing directly with the true swarm utility
6 Conclusion
This paper explores the role of behavioral heterogeneity in robot swarms engaged in foraging. It presents an abstract theoretical model of this swarm task, showing a mathematical connection between the Coordination Overhead
Specifically, we presented the Aligned Effectiveness Index
We focused on swarm foraging, a canonical swarm task of great interest both scientifically and commercially (e,g., in order picking, search and rescue, and agriculture; see applications discussed in Section 2). We have shown several solutions to challenges that may rise in practice when applying the theoretical model. First, we discussed several possible approximations for the
The results of the experiments clearly support the hypothesis that diversity in decision-making can play an important role in the performance of a swarm. This conclusion agrees with studies of swarms, whose members evolve their decision-making controllers using evolutionary computation (Montague et al., 2023), and studies of behavioral diversity in models of human pedestrians [e.g., in mixed culture (Kaminka and Fridman, 2018)]. Surprisingly, perhaps, Balch (1999) has investigated the use of machine learning in simulated foraging robots (up to 8) and reached conclusions opposite from ours, which states that foraging robots seemed to benefit from being homogeneous. We believe that this seeming contradiction in conclusions is a result of the previous study utilizing robots that were able to communicate information about the location of items and home. We also note that the results demonstrate that diversity can be extremely important to the success of the swarm but is not always needed. For instance, in the experiments we conducted, homogeneous decision-making seems to do well in smaller swarm sizes (see Figure 10).
The conclusion we reach on behavioral diversity complements analogous conclusions as to the importance of diversity in capabilities, in related studies. For example, the swarmanoid project (Dorigo et al., 2012) explores the use of mechanically different robots in carrying out complex tasks. Berumen et al. (2023) demonstrated the impact of robots with diverse error models on foraging performance, and Adams et al. (2023) developed foraging swarms made of two types of robots: searchers and beacons that assist in communicating signals in-limited communication settings. Swarms of heterogeneous nanobots are able to carry out complex tasks, e.g., a form of Asimov’s laws of robots (Kaminka et al., 2017). In the larger context of multi-robot systems, similar ideas about the importance of diversity have been presented in investigations of heterogeneous teams, where robots communicate globally and essentially without restrictions so as to coordinate how to bring their different capabilities to bear on the joint problem. Such investigations include those by Xu et al. (2005), Parker and Tang (2006), Tang and Parker (2007), and Liemhetcharat and Veloso (2013). Likewise, heterogeneity plays an important role in natural swarms as well, e.g., see (Ariel et al., 2022).
Although this study focused on diversity of the swarm, complementary studies examine the optimality of the individual robot’s decision-making, when robots use aligned rewards. Recent investigations of alternative learning approaches and alternative formulations begin to explore the question of how individual self-interested rational reward maximization leads to collective utility maximization (Fatima et al., 2024; Katz, 2023; Kaminka, 2025).
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
GK: writing–original draft and writing–review and editing. YD: writing–original draft and writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. The authors gratefully acknowledge partial funding support from Israel Science Foundation Grants #2306/18 and #1373/24.
Acknowledgments
GK thanks K. Ushi, as always.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1Human workers used to walk 20 km a day to pick ordered items in shelves in such warehouses, and labor was in short supply.
2The definition of coordination in Danassis and Faltings (2018) differs from the definition of coordination in our work. We define coordination as the need to take an action due to an interaction between agents. They define coordination as a consensus: where agents need to choose the same action in order to achieve optimal results.
3https://www.robotican.net/kremebot
4https://www.cs.biu.ac.il/∼galk/research/swarms/
References
Adams, S., Jarne Ornia, D., and Mazo, M. (2023). A self-guided approach for navigation in a minimalistic foraging robotic swarm. Aut. Robots 47, 905–920. doi:10.1007/s10514-023-10102-y
Adhikari, S. (2021). Study of scalability in a robot swarm performance and demonstration of superlinear performance in conveyor bucket brigades and collaborative pulling. Spain: Master’s thesis, The University of Toledo.
Agmon, N., Hazon, N., and Kaminka, G. A. (2008a). The giving tree: constructing trees for efficient offline and online multi-robot coverage. Ann. Math Artif. Intell. 52, 143–168. doi:10.1007/s10472-009-9121-1
Agmon, N., Kraus, S., and Kaminka, G. A. (2008b). “Multi-robot perimeter patrol in adversarial settings,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-08), Pasadena, CA, USA, 19-23 May 2008, 2339–2345. doi:10.1109/robot.2008.4543563
Agogino, A., and Tumer, K. (2008). Analyzing and visualizing multiagent rewards in dynamic and stochastic domains. J. Aut. Agents Multi-Agent Syst. 17, 320–338. doi:10.1007/s10458-008-9046-9
Albiero, D., Pontin Garcia, A., Kiyoshi Umezu, C., and Leme De Paulo, R. (2022). Swarm robots in mechanized agricultural operations: a review about challenges for research. Comput. Electron. Agric. 193, 106608. doi:10.1016/j.compag.2021.106608
Alers, S., Tuyls, K., Ranjbar-Sahraei, B., Claes, D., and Weiss, G. (2014). “Insect-inspired robot coordination: foraging and coverage,” in ALIFE 14: Proceedings of the Fourteenth International Conference on the Synthesis and Simulation of Living Systems, 761–768. doi:10.1162/978-0-262-32621-6-ch123
Aljalaud, F., and Kurdi, H. A. (2021). Autonomous task allocation for multi-UAV systems based on area-restricted search behavior in animals. Procedia Comput. Sci. 191, 246–253. doi:10.1016/j.procs.2021.07.031
Amanatiadis, A., Henschel, C., Birkicht, B., Andel, B., Charalampous, K., Kostavelis, I., et al. (2015). “Avert: an autonomous multi-robot system for vehicle extraction and transportation,” in IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26-30 May 2015, 1662–1669. doi:10.1109/icra.2015.7139411
Ariel, G., Ayali, A., Be’er, A., and Knebel, D. (2022). Variability and heterogeneity in natural swarms: experiments and modeling. Act. Part. 3, 1–33. doi:10.1007/978-3-030-93302-9_1
Arslan, G., Marden, J. R., and Shamma, J. S. (2007). Autonomous vehicle-target assignment: a game theoretical formulation. ASME J. Dyn. Syst. Meas. Control 129, 584–596. doi:10.1115/1.2766722
Balch, T. (1999). “The impact of diversity on performance in multi-robot foraging,” in Proceedings of the third annual conference on Autonomous Agents (ACM), 92–99.
Balch, T., and Arkin, R. C. (1998). Behavior-based formation control for multirobot teams. IEEE Trans. Robotics Automation 14, 926–939. doi:10.1109/70.736776
Balch, T., and Hybinette, M. (2000). “Social potentials for scalable multirobot formations,” in Proceedings of IEEE International Conference on robotics and automation (ICRA-00).
Basilico, N., Gatti, N., and Amigoni, F. (2009). “Leader-follower strategies for robotic patrolling in environments with arbitrary topologies,” in Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems, 57–64.
Bastien, R., and Romanczuk, P. (2020). A model of collective behavior based purely on vision. Sci. Adv. 6, 0792. doi:10.1126/sciadv.aay0792
Batalin, M., and Sukhatme, G. (2002). “Spreading out: a local approach to multi-robot coverage,” in International symposium on distributed autonomous robotic systems (DARS), 373–382.
Berumen, E. B., Alden, K. J., Pomfret, A., Timmis, J., and Tyrrell, A. (2023). A study of error diversity in robotic swarms for task partitioning in foraging tasks. Front. Robotics AI. doi:10.3389/frobt.2022.904341
Bouraine, S., Fraichard, T., Azouaoui, O., and Salhi, H. (2014). “Passively safe partial motion planning for mobile robots with limited field-of-views in unknown dynamic environments,” in Proceedings of IEEE International Conference on Robotics and Automation, 3576–3582. doi:10.1109/icra.2014.6907375
Bradtke, S. J., and Duff, M. O. (1994). “Reinforcement learning methods for continuous-time markov decision problems,” in Advances in neural information processing systems (MIT Press), 393–400.
Cheraghi, A. R., Peters, J., and Graffi, K. (2020). “Prevention of ant mills in pheromone-based search algorithm for robot swarms,” in 2020 3rd International Conference on Intelligent Robotic and Control Engineering (IRCE), 23–30doi. doi:10.1109/IRCE50905.2020.9199239
Claus, C., and Boutilier, C. (1998). The dynamics of reinforcement learning in cooperative multiagent systems. AAAI/IAAI 1998, 746–752.
Danassis, P., and Faltings, B. (2018). A courteous learning rule for ad-hoc anti-coordination. arXiv preprint arXiv:1801.07140
Desai, J. P. (2002). A graph theoretic approach for modeling mobile robot team formations. J. Robotic Syst. 19, 511–525. doi:10.1002/rob.10057
Desai, J. P., Ostrowski, J., and Kumar, V. (1998). “Controlling formations of multiple mobile robots,” in Proceedings of IEEE International Conference on Robotics and Automation, 2864–2869. doi:10.1109/robot.1998.680621
Devlin, S., Yliniemi, L., Kudenko, D., and Tumer, K. (2014). “Potential-based difference rewards for multiagent reinforcement learning,” in Proceedings of the Thirteenth International Joint Conference on Autonomous Agents and Multiagent Systems (Paris, France).
Dias, M. B., and Stentz, A. T. (2000). “A free market architecture for distributed control of a multirobot system,” in 6th International Conference on Intelligent Autonomous Systems (IAS-6), 115–122.
Dias, M. B., Zlot, R., Zinck, M., Gonzalez, J. P., and Stentz, A. (2004). “A versatile implementation of the traderbots approach for multirobot coordination,” in Proceedings of the Eighth Conference on Intelligent Autonomous Systems (IAS-8).
Dorigo, M., Floreano, D., Gambardella, L., Mondada, F., Nolfi, S., Baaboura, T., et al. (2012). Swarmanoid: a novel concept for the study of heterogeneous robotic swarms. IEEE Robotics and Automation Mag. 20, 60–71. doi:10.1109/mra.2013.2252996
Dorigo, M., Theraulaz, G., and Trianni, V. (2021). Swarm robotics: past, present, and future [point of view]. Proc. IEEE 109, 1152–1165. doi:10.1109/JPROC.2021.3072740
Douchan, Y., and Kaminka, G. A. (2016). “The effectiveness index intrinsic reward for coordinating service robots,” in 13th international symposium on distributed autonomous robotic systems (DARS-2016). Editors S. Berman, M. Gauci, E. Frazzoli, A. Kolling, R. Gross, A. Martinoliet al. (Springer).
Douchan, Y., Wolf, R., and Kaminka, G. A. (2019). “Swarms can be rational,” in Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems.
Duncan, S., Estrada-Rodriguez, G., Stocek, J., Dragone, M., Vargas, P. A., and Gimperlein, H. (2022). Efficient quantitative assessment of robot swarms: coverage and targeting Lévy strategies. Bioinspiration and Biomimetics 17, 036006. doi:10.1088/1748-3190/ac57f0
Elmaliach, Y., Agmon, N., and Kaminka, G. A. (2007). “Multi-robot area patrol under frequency constraints,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-07), 385–390. doi:10.1109/robot.2007.363817
Elmaliach, Y., Agmon, N., and Kaminka, G. A. (2009). Multi-robot area patrol under frequency constraints. Ann. Math Artif. Intell. 57, 293–320. doi:10.1007/s10472-010-9193-y
Elmaliach, Y., Shiloni, A., and Kaminka, G. A. (2008). “A realistic model of frequency-based multi-robot fence patrolling,” in Proceedings of the Seventh International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS-08), 63–70.1
Erusalimchik, D., and Kaminka, G. A. (2008). “Towards adaptive multi-robot coordination based on resource expenditure velocity,” in Proceedings of the Tenth Conference on Intelligent Autonomous Systems (IAS-10) (Amsterdam, Netherlands: IOS Press).
Farinelli, A., Iocchi, L., and Nardi, D. (2004). Multirobot systems: a classification focused on coordination. IEEE Trans. Syst. Man, Cybern. Part B Cybern. 34, 2015–2028. doi:10.1109/TSMCB.2004.832155
Farinelli, A., Iocchi, L., Nardi, D., and Ziparo, V. A. (2006). Assignment of dynamically perceived tasks by token passing in multi-robot systems. Proc. IEEE 94, 1271–1288. Special issue on Multi-Robot Systems. doi:10.1109/jproc.2006.876937
Fatima, S., Jennings, N. R., and Wooldridge, M. (2024). Learning to resolve social dilemmas: a survey. J. Artif. Intell. Res. 79, 895–969. doi:10.1613/jair.1.15167
Ferrer, E. C., Hardjono, T., Pentland, A., and Dorigo, M. (2021). Secure and secret cooperation in robot swarms. Sci. Robotics 6, eabf1538. doi:10.1126/scirobotics.abf1538
Fox, D., Burgard, W., and Thrun, S. (1997). The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 4, 23–33. doi:10.1109/100.580977
Francisco, J., Gonzalez Herrera, F., and Lara-Alvarez, C. (2018). “A coordinated wilderness search and rescue technique inspired by bacterial foraging behavior,” in In In proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), 318–324. doi:10.1109/ROBIO.2018.8665267
Fredslund, J., and Mataric, M. J. (2002). A general algorithm for robot formations using local sensing and minimal communication. IEEE Trans. Robotics Automation 18, 837–846. doi:10.1109/tra.2002.803458
Gage, D. W. (1992). “Command control for many-robot systems,” in The nineteenth annual AUVS Technical Symposium (AUVS-92).
Gerkey, B. P., and Matarić, M. (2004). A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robotics Res. 23, 939–954. doi:10.1177/0278364904045564
Gerkey, B. P., and Mataric, M. J. (2002). Sold!: auction methods for multi-robot coordination. IEEE Trans. Robotics Automation 18, 758–768. doi:10.1109/tra.2002.803462
Giuggioli, L., Arye, I., Robles, A. H., and Kaminka, G. A. (2016). “From ants to birds: a novel bio-inspired approach to online area coverage,” in International symposium on distributed autonomous robotic systems (DARS). Editors S. Berman, M. Gauci, E. Frazzoli, A. Kolling, R. Gross, A. Martinoliet al. (Springer).
Godoy, J., Karamouzas, I., Guy, S. J., and Gini, M. (2015). “Adaptive learning for multi-agent navigation,” in Proceedings of the 2015 International Conference on Autonomous Agents and Multi-Agent Systems (International Foundation for Autonomous Agents and Multi-Agent Systems), 1577–1585.
Goldberg, D., Cicirello, V., Dias, M. B., Simmons, R., Smith, S., and Stentz, A. T. (2003). “Market-based multi-robot planning in a distributed layered architecture,” in Multi-robot systems: from swarms to intelligent automata: proceedings from the 2003 international workshop on multi-robot systems (Kluwer Academic Publishers), 2, 27–38.
Goldberg, D., and Matarić, M. (1997). “Interference as a tool for designing and evaluating multi-robot controllers,” in AAAI/IAAI, 637–642.
Goldberg, D., and Mataric, M. J. (1997). “Interference as a tool for designing and evaluating multi-robot controllers,” in Proceedings of the Fourteenth National Conference on Artificial Intelligence (AAAI-97) (Providence, RI: AAAI Press), 637–642.
Guy, S. J., Lin, M. C., and Manocha, D. (2010). “Modeling collision avoidance behavior for virtual humans,” in Proceedings of the Ninth International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS-10), 575–582.
Hahn, C., Ritz, F., Wikidal, P., Phan, T., Gabor, T., and Linnhoff-Popien, C. (2020). “Foraging swarms using multi-agent reinforcement learning,” in In Proceedings of the 2020 Conference on Artificial Life (MIT Press), 333–340. doi:10.1162/isal_a_00267
Hazard, C. J., and Wurman, P. R. (2006). “Alphabet soup: a testbed for studying resource allocation in multi-vehicle systems,” in In proceedings of the 2006 AAAI workshop on auction mechanisms for robot coordination, 23–30.
Hazon, N., and Kaminka, G. (2008). On redundancy, efficiency, and robustness in coverage for multiple robots. Robotics Aut. Syst. 56, 1102–1114. doi:10.1016/j.robot.2008.01.006
Hénard, A., Rivière, J., Peillard, E., Kubicki, S., and Coppin, G. (2023). A unifying method-based classification of robot swarm spatial self-organisation behaviours. Adapt. Behav. 31, 577–599. doi:10.1177/10597123231163948
Hernandez-Leal, P., Kaisers, M., Baarslag, T., and de Cote, E. M. (2019). A survey of learning in multiagent environments: dealing with non-stationarity. Tech. Rep. 1707, 09183v2. [cs].
Hoff, N. R., Sagoff, A., Wood, R. J., and Nagpal, R. (2010). “Two foraging algorithms for robot swarms using only local communication,” in IEEE International Conference on Robotics and Biomimetics (ROBIO IEEE), 123–130.
Jensen, E., Franklin, M., Lahr, S., and Gini, M. (2011). “Sustainable multi-robot patrol of an open polyline,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-11), 4792–4797. doi:10.1109/icra.2011.5980279
Jin, B., Liang, Y., Han, Z., and Ohkura, K. (2020). Generating collective foraging behavior for robotic swarm using deep reinforcement learning. Artif. Life Robot. 25, 588–595. doi:10.1007/s10015-020-00642-2
Kaminka, G. A. (2025). Swarms can be rational. Philosophical Transactions of the Royal Society A In press.
Kaminka, G. A., Erusalimchik, D., and Kraus, S. (2010). “Adaptive multi-robot coordination: a game-theoretic perspective,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-10), 328–334. doi:10.1109/robot.2010.5509316
Kaminka, G. A., and Frenkel, I. (2005). “Flexible teamwork in behavior-based robots,” in Proceedings of the Twentieth National Conference on Artificial Intelligence (AAAI-05).
Kaminka, G. A., and Frenkel, I. (2007). “Integration of coordination mechanisms in the BITE multi-robot architecture,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-07), 2859–2866. doi:10.1109/robot.2007.363905
Kaminka, G. A., and Fridman, N. (2018). Simulating urban pedestrian crowds of different cultures. ACM Trans. Intelligent Syst. Technol. 9 (27), 1–27. doi:10.1145/3102302
Kaminka, G. A., and Glick, R. (2006). “Towards robust multi-robot formations,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-06).
Kaminka, G. A., Lupu, I., and Agmon, N. (2016). “Construction of optimal control graphs in multi-robot systems,” in 13th international symposium on distributed autonomous robotic systems (DARS-2016). Editors S. Berman, M. Gauci, E. Frazzoli, A. Kolling, R. Gross, A. Martinoliet al. (Springer).
Kaminka, G. A., Schechter-Glick, R., and Sadov, V. (2008). Using sensor morphology for multi-robot formations. IEEE Trans. Robotics 24, 271–282. doi:10.1109/tro.2008.918054
Kaminka, G. A., Spokoini-Stern, R., Amir, Y., Agmon, N., and Bachelet, I. (2017). Molecular robots obeying Asimov’s three laws of robotics. Artif. Life 23, 343–350. doi:10.1162/ARTL_a_00235
Kaminka, G. A., Traub, M., Elmaliach, Y., Erusalimchik, D., and Fridman, A. (2013). “On the use of teamwork software for multi-robot formation control (an extended abstract),” in Proceedings of the Twelfth International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS-13).
Kaminka, G. A., Yakir, A., Erusalimchik, D., and Cohen-Nov, N. (2007). “Towards collaborative task and team maintenance,” in Proceedings of the Sixth International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS-07).
Kapetanakis, S., and Kudenko, D. (2002). Reinforcement learning of coordination in cooperative multi-agent systems. AAAI/IAAI 2002, 326–331.
Kober, J., Bagnell, J. A. D., and Peters, J. (2013). Reinforcement learning in robotics: a survey. Int. J. Robotics Res. 32, 1238–1274. doi:10.1177/0278364913495721
Kuckling, J. (2023). Recent trends in robot learning and evolution for swarm robotics. Front. Robotics AI 10, 1134841. doi:10.3389/frobt.2023.1134841
Lee, D., Lu, Q., and Au, T.-C. (2022). “Dynamic robot chain networks for swarm foraging,” in 2022 International Conference on Robotics and Automation (ICRA), 4965–4971. doi:10.1109/ICRA46639.2022.9811625
Lemay, M., Michaud, F., Létourneau, D., and Valin, J.-M. (2004). “Autonomous initialization of robot formations,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-04), 3018–3023 Vol.3. doi:10.1109/robot.2004.1307520
Lerman, K., and Galstyan, A. (2002). Mathematical model of foraging in a group of robots: effect of interference. Aut. Robots 13, 127–141. doi:10.1023/a:1019633424543
Liemhetcharat, S., and Veloso, M. M. (2013). “Synergy graphs for configuring robot team members,” in Proceedings of the Twelfth International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS-13), 111–118.
Löffler, R. C., Panizon, E., and Bechinger, C. (2023). Collective foraging of active particles trained by reinforcement learning. Sci. Rep. 13, 17055. doi:10.1038/s41598-023-44268-3
Lu, Q., Fricke, G. M., Ericksen, J. C., and Moses, M. E. (2020). Swarm foraging review: closing the gap between proof and practice. Curr. Robot. Rep. 1, 215–225. doi:10.1007/s43154-020-00018-1
Marden, J. R., and Wierman, A. (2009). “Overcoming limitations of game-theoretic distributed control,” in Proceedings of the 48h IEEE Conference on Decision and Control (CDC) (United States: IEEE Press), 6466–6471.
Marino, A., Parker, L. E., Antonelli, G., and Caccavale, F. (2009). “Behavioral control for multi-robot perimeter patrol: a finite state automata approach,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-09), 831–836. doi:10.1109/robot.2009.5152710
Mataric, M. J. (1994). Interaction and intelligent behavior. United States: Ph.D. thesis, Massachusetts Institute of Technology.
McGuigan, L., Sterritt, R., Wilkie, G., and Hawe, G. (2022). Decentralised autonomic self-adaptation in a foraging robot swarm. Int. J. Adv. Intelligent Syst. 15, 12–23.
Michael, N., Zavlanos, M. M., Kumar, V., and Pappas, G. J. (2008). “Distributed multi-robot task assignment and formation control,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-08), 128–133. doi:10.1109/robot.2008.4543197
Michaud, F., Létourneau, D., Gilbert, M., and Valin, J.-M. (2002). “Dynamic robot formations using directional visual perception,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.
Monderer, D., and Shapley, L. (1996). Potential games. Games Econ. Behav. 14, 124–143. doi:10.1006/game.1996.0044
Montague, K., Hart, E., Nitschke, G., and Paechter, B. (2023). “A quality-diversity approach to evolving a repertoire of diverse behaviour-trees in robot swarms,” in Proceedings of International Conference on the Applications of Evolutionary Computation (Brno, Czech Republic: Springer).
Moshtagh, N., Michael, N., Jadbabaie, A., and Daniilidis, K. (2009). Vision-based, distributed control laws for motion coordination of nonholonomic robots. IEEE Trans. Robotics 25, 851–860. doi:10.1109/TRO.2009.2022439
Nuzhin, E. E., Panov, M. E., and Brilliantov, N. V. (2021). Why animals swirl and how they group. Sci. Rep. 11, 20843. doi:10.1038/s41598-021-99982-7
Ordaz-Rivas, E., Rodriguez-Liñan, A., and Torres-Treviño, L. (2021). Autonomous foraging with a pack of robots based on repulsion, attraction and influence. Aut. Robots 45, 919–935. doi:10.1007/s10514-021-09994-5
Ordaz-Rivas, E., and Torres-Treviño, L. (2022). “Modeling and simulation of swarm of foraging robots for collecting resources using RAOI behavior policies,” in Advances in computational intelligence. Editors O. Pichardo Lagunas, J. Martínez-Miranda, and B. Martínez Seis (Cham: Springer Nature Switzerland), 266–278. doi:10.1007/978-3-031-19496-2_20
Osherovich, E., Yanovski, V., I. A, W., and Bruckstein, A. M. (2007). “Robust and Efficient Covering of Unknown Continuous Domains with Simple, Ant-Like A(ge)nts,” in Tech. Rep. CIS-2007-04. Israel: Technion Computer Science Department
Pacheco, A., Strobel, V., Reina, A., and Dorigo, M. (2022). “Real-time coordination of a foraging robot swarm using blockchain smart contracts,” in Swarm intelligence. Editors M. Dorigo, H. Hamann, M. López-Ibáñez, J. García-Nieto, A. Engelbrecht, C. Pinciroliet al. (Cham: Springer International Publishing), 196–208. doi:10.1007/978-3-031-20176-9_16
Parker, L. E. (1998). ALLIANCE: an architecture for fault tolerant multirobot cooperation. IEEE Trans. Robotics Automation 14, 220–240. doi:10.1109/70.681242
Parker, L. E. (2008). “Multiple mobile robot systems,” in Springer handbook of robotics (Springer), 921–941.
Parker, L. E., and Tang, F. (2006). Building multi-robot coalitions through automated task solution synthesis. Proc. IEEE 94 (Special issue on Multi-Robot Systems), 1289–1305. doi:10.1109/jproc.2006.876933
Pham, N. H., and Nguyen, M. D. (2020). Bacterial foraging algorithm for optimal joint-force searching strategy of multi – SAR vessels at sea. Tech. Rep. 2020030471, Prepr. doi:10.20944/preprints202003.0471.v1
Pitonakova, L., Crowder, R., and Bullock, S. (2014). “Understanding the role of recruitment in collective robot foraging,” in Artificial Life XIV: Proceedings of the Fourteenth International Conference on the Synthesis and Simulation of Living Systems. Editors H. Lipson, H. Sayama, J. Rieffel, S. Risi, and R. Doursat (Massachusetts Institute of Technology (MIT) Press), 264–271.
Portugal, D., and Rocha, R. P. (2013). Multi-robot patrolling algorithms: examining performance and scalability. Adv. Robot. 27, 325–336. doi:10.1080/01691864.2013.763722
Rekleitis, I., New, A. P., Rankin, E. S., and Choset, H. (2008). Efficient boustrophedon multi-robot coverage: an algorithmic approach. Ann. Math. Artif. Intell. 52, 109–142. doi:10.1007/s10472-009-9120-2
Rosenfeld, A., Kaminka, G. A., Kraus, S., and Shehory, O. (2008). A study of mechanisms for improving robotic group performance. Artif. Intell. 172, 633–655. doi:10.1016/j.artint.2007.09.008
Rybski, P., Larson, A., Lindahl, M., and Gini, M. (1998). “Performance evaluation of multiple robots in a search and retrieval task,” in Proceedings of the Workshop on artificial Intelligence and manufacturing (albuquerque, NM), 153–160.
Salman, M., Garzón Ramos, D., and Birattari, M. (2024). Automatic design of stigmergy-based behaviours for robot swarms. Commun. Eng. 3, 30–13. doi:10.1038/s44172-024-00175-7
Schloesser, D. S., Hollenbeck, D., and Kello, C. T. (2021). Individual and collective foraging in autonomous search agents with human intervention. Sci. Rep. 11, 8492. doi:10.1038/s41598-021-87717-7
Schneider-Fontan, M., and Matarić, M. (1998). Territorial multi-robot task division. IEEE Trans. Robotics Automation 14, 815–822. doi:10.1109/70.720357
Sempe, F., and Drogoul, A. (2003). “Adaptive patrol for a group of robots,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2865–2869. doi:10.1109/IROS.2003.1249305
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R. (2015). Conflict-based search for optimal multi-agent pathfinding. Artif. Intell. 219, 40–66. doi:10.1016/j.artint.2014.11.006
Simmons, R. G., Goodwin, R., Haigh, K. Z., Koenig, S., and O’Sullivan, J. (1997). “A layered architecture for office delivery robots,” in Proceedings of the First International Conference on Autonomous Agents (Agents-97), 245–252. doi:10.1145/267658.267723
Snape, J., van den Berg, J. P., Guy, S. J., and Manocha, D. (2011). The hybrid reciprocal velocity obstacle. IEEE Trans. Robotics 27, 696–706. doi:10.1109/tro.2011.2120810
Song, Z., and Vaughan, R. T. (2013). “Sustainable robot foraging: adaptive fine-grained multi-robot task allocation for maximum sustainable yield of biological resources,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE), 3309–3316. doi:10.1109/iros.2013.6696827
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H., Walker, T. T., et al. (2019). “Multi-agent pathfinding: definitions, variants, and benchmarks,” in In proceedings of the annual symposium on combinatorial search.
Suarez, J., and Murphy, R. (2011). “A survey of animal foraging for directed, persistent search by rescue robotics,” in 2011 IEEE international symposium on safety, security, and rescue robotics, 314–320. doi:10.1109/SSRR.2011.6106744
Sung, C., Ayanian, N., and Rus, D. (2013). “Improving the performance of multi-robot systems by task switching,” in 2013 IEEE International Conference on Robotics and Automation, 2999–3006. doi:10.1109/ICRA.2013.6630993
Tang, F., and Parker, L. E. (2007). “A complete methodology for generating multi-robot task solutions using asymtre-d and market-based task allocation,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-07), 3351–3358.
Thrun, S., Beetz, M., Bennewitz, M., Burgard, W., Cremers, A. B., Dellaert, F., et al. (2000). Probabilistic algorithms and the interactive museum tour-guide robot minerva. Int. J. Robotics Res. 19, 972–999. doi:10.1177/02783640022067922
Tumer, K., Agogino, A. K., and Wolpert, D. H. (2002). “Learning sequences of actions in collectives of autonomous agents,” in Proceedings of the First International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS-02) (New York, NY, United States), 378–385. doi:10.1145/544741.544832
Tumer, K., Welch, Z., and Agogino, A. (2008). “Aligning social welfare and agent preferences to alleviate traffic congestion,” in Proceedings of the Seventh International Joint Conference on Autonomous Agents and Multiagent Systems (Estoril, Portugal).
Van Calck, L., Pacheco, A., Strobel, V., Dorigo, M., and Reina, A. (2023). A blockchain-based information market to incentivise cooperation in swarms of self-interested robots. Sci. Rep. 13, 20417. doi:10.1038/s41598-023-46238-1
van den Berg, J., Guy, S., Lin, M., and Manocha, D. (2011). Reciprocal n-body collision avoidance. Robotics Res., 3–19. doi:10.1007/978-3-642-19457-3_1
van den Berg, J., Lin, M. C., and Manocha, D. (2008). “Reciprocal velocity obstacles for real-time multi-agent navigation,” in Proceedings of IEEE International Conference on Robotics and Automation (ICRA-08), 1928–1935.
Vaughan, R., Støy, K., Sukhatme, G., and Matarić, M. (2000). “Go ahead, make my day: robot conflict resolution by aggressive competition,” in Proceedings of the 6th int. conf. on the Simulation of Adaptive Behavior (Paris, France), 491–500. doi:10.7551/mitpress/3120.003.0052
Vig, L., and Adams, J. A. (2006). “Market-based multi-robot coalition formation,” in International symposium on distributed autonomous robotic systems (DARS). Editors M. Gini, and R. Voyles (Springer Japan), 227–236.
Winfield, A. F. (2009). “Foraging robots,” in Encyclopedia of complexity and systems science. Editor R. A. Meyers (New York, NY: Springer New York), 3682–3700.
Wolpert, D., Wheeler, K. R., and Tumer, K. (1999). Collective intelligence for control of distributed dynamical systems. Tech. Rep. cs.LG/9908013, CoRR/arxiv.
Wolpert, D. H., and Tumer, K. (1999). An introduction to collective intelligence. Tech. Rep. NASA-ARC-IC-99-63, NASA. Also Corr. cs.LG/9908014.
Wurman, P. R., Dándrea, R., and Mountz, M. (2008). Coordinating hundreds of cooperative, autonomous vehicles in warehouses. AI Mag. 29, 9–19. doi:10.1609/aimag.v29i1.2082
Xu, Y., Scerri, P., Yu, B., Okamoto, S., Lewis, M., and Sycara, K. (2005). “An integrated token-based approach to scalable coordination,” in Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS-05).
Yan, C., and Zhang, T. (2016). Multi-robot patrol: a distributed algorithm based on expected idleness. Int. J. Adv. Robotic Syst. 13, 1729881416663666. doi:10.1177/1729881416663666
Yehoshua, R., Agmon, N., and Kaminka, G. A. (2016). Robotic adversarial coverage of known environments. Int. J. Robotics Res. 35, 1419–1444. doi:10.1177/0278364915625785
Yu, J., and Lavalle, S. M. (2015). Optimal multi-robot path planning on graphs: structure and computational complexity. arXiv preprint arXiv:1507.03289
Zedadra, O., Jouandeau, N., Seridi, H., and Fortino, G. (2017). Multi-agent foraging: state-of-the-art and research challenges. Complex Adapt. Syst. Model. 5, 3. doi:10.1186/s40294-016-0041-8
Zhang, K., Yang, Z., and Başar, T. (2021). “Multi-agent reinforcement learning: a selective overview of theories and algorithms,” in Handbook of reinforcement learning and control, 321–384.
Zlot, R., and Stentz, A. (2006). Market-based multirobot coordination for complex tasks. Int. J. Robotics Res. 25, 73–101. doi:10.1177/0278364906061160
Zuluaga, M., and Vaughan, R. T. (2005). “Reducing spatial interference in robot teams by local-investment aggression,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2798–2805. doi:10.1109/iros.2005.1545099
Appendix A: Nomenclature
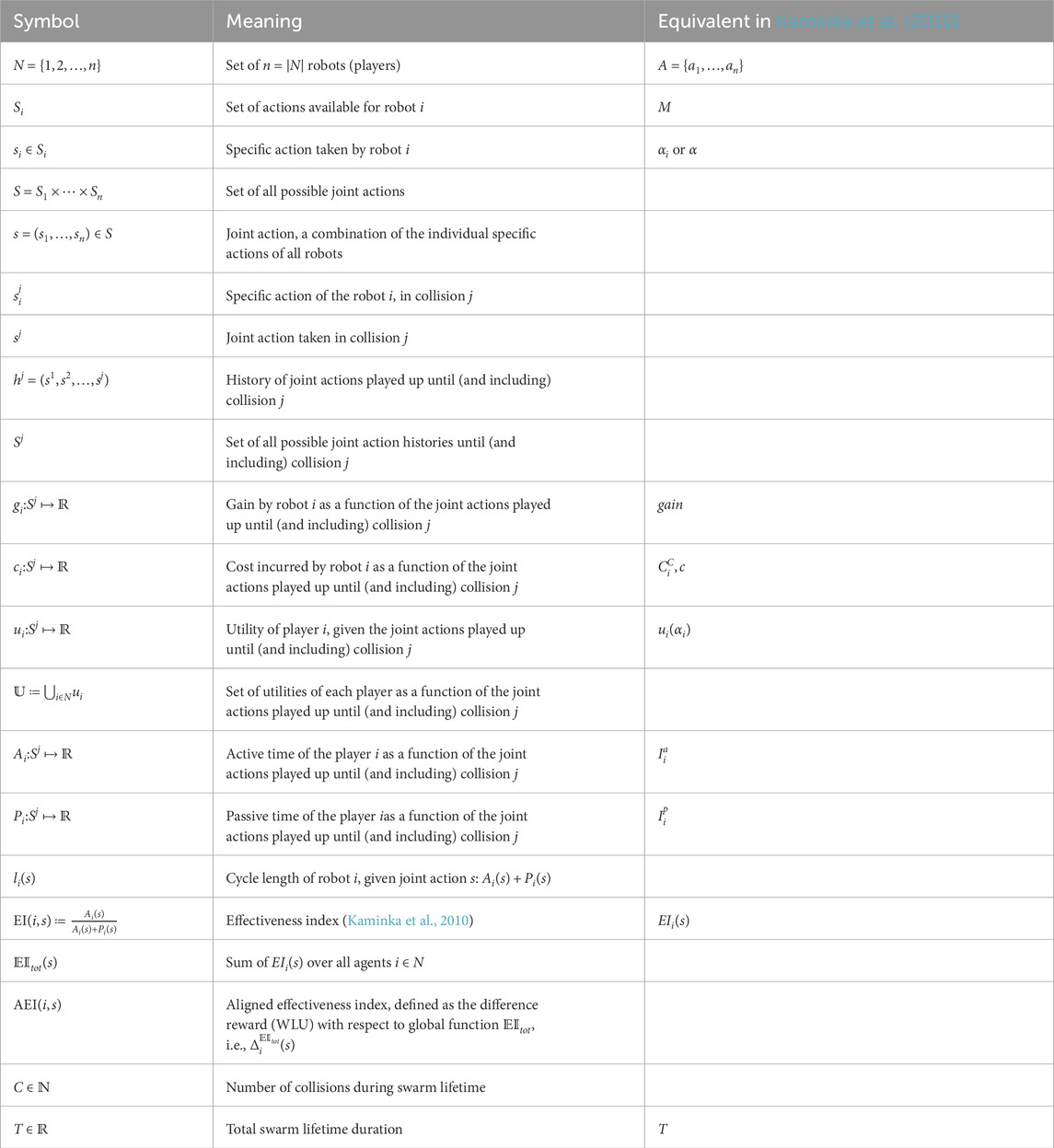
TABLE A1. List of symbols and notations used in this paper. Where appropriate, we also list equivalent notation used by Kaminka et al. (2010).
Keywords: multi-agent reinforcement learning, foraging, swarm robotics, heterogeneous robots, robot diversity, difference reward, marginal contribution, game theory
Citation: Kaminka GA and Douchan Y (2025) Heterogeneous foraging swarms can be better. Front. Robot. AI 11:1426282. doi: 10.3389/frobt.2024.1426282
Received: 01 May 2024; Accepted: 12 November 2024;
Published: 20 January 2025.
Edited by:
Qi Lu, The University of Texas Rio Grande Valley, United StatesReviewed by:
János Botzheim, Eötvös Loránd University, HungaryPhilip M. Dames, Temple University, United States
Copyright © 2025 Kaminka and Douchan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Gal A. Kaminka, Z2Fsa0Bjcy5iaXUuYWMuaWw=