 Xuxiang Feng
Xuxiang Feng Lu Shi
Lu Shi Yumeng Zhang
Yumeng Zhang- 1Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing, China
- 2School of Electronics and Information, Northwestern Polytechnical University, Xi’an, China
This study presents a command filtered control scheme for multi-input multi-output (MIMO) strict feedback nonlinear unmodeled dynamical systems with its applications to power systems. To deal with dynamic uncertainties, a dynamic signal is introduced, together with radial basis function neural networks (RBFNNs) to overcome the influences of the dynamic uncertainties. Command filters (CFs) are used to prevent the explosion of complexity, where the compensating signals can eliminate the effect of filter errors. Compared with single-input single-output strict feedback nonlinear systems, the method proposed in this study has more suitability. In the end, the simulation experiments are carried out by applying the developed algorithm to power systems, where the simulation results verify the efficacy of the approach proposed.
1 Introduction
In recent years, adaptive control has become a hotspot because of its strong disturbance-rejection property. Related theories, such as model reference control, robust adaptive control, and adaptive dynamic programming (Mukherjee et al., 2017; Yang et al., 2021b; Han and Liu, 2020; Yang et al., 2021d; L’Afflitto, 2018; Yang et al., 2021e), have been applied to many fields, including power systems, wind energy systems, and multi-agent systems (Li et al., 2020; Xu et al., 2018; Wu et al., 2017; Ghaffarzdeh and Mehrizi-Sani, 2020; Zou et al., 2020b; Ghosh and Kamalasadan, 2017; Namazi et al., 2018; Zou et al., 2020a). Moreover, applications of adaptive control on energy systems are also widely reported (Deese and Vermillion, 2021; Quan et al., 2020; Liu et al., 2022; Nascimento Moutinho et al., 2008; Liu et al., 2021). Among them, backstepping is a powerful tool since many energy systems can essentially be modeled as strict feedback systems, which can be analyzed through the backstepping technique.
The main idea of backstepping is to divide the whole system into a series of subsystems so that they can be analyzed individually. In this way, the control design and stability analysis can both be simplified, especially for large-scale systems (Yang et al., 2021a). Meanwhile, for unmodeled dynamical systems, if the unmodeled dynamics are ignored, the disturbance from dynamic uncertainties may result in unbounded evolution. Therefore, the dynamic uncertainties need to be paid enough attention, which is not considered in the aforementioned literatures. Zhao J. et al. (2021) presented a fuzzy adaptive control approach with an observer design for unmodeled dynamical systems. Xia et al. developed an output feedback controldesign with quantized performance for dynamic uncertainties in Xia and Zhang (2018). Wang et al. (2017)investigated nonstrict feedback systems with unmodeled dynamics and dead zones through output feedback-based control methods. Although the aforementioned results can successfully tackle dynamic uncertainties, they are not able to deal with the explosion of complexity and avoid the influences of filter errors.
In the backstepping process, the explosion of complexity often occurs because the virtual control is repeatedly differentiated. Meanwhile, the computational complexity increases significantly, which results in the presented design not being suitable for applications (Yang et al., 2020). To deal with this issue, the dynamic surface control method is proposed (Wang and Huang, 2005). The dynamic surface control method uses first-order filters, where the virtual control is replaced by the filter states in each subsystem (Yang et al., 2021c). In this way, the repeated differentiation issue can be evaded. However, filter errors are introduced simultaneously, which degrades the control precision. Thus, command filters (CFs) are developed (Farrell et al., 2009). Based on the dynamic surface control approach, CFs additionally introduce compensating signals to compensate for the loss caused by filter errors, which further improves the control accuracy compared with the dynamic surface control method. Owing to this advantage, CFs are widely applied to many systems. For example, Zhu et al. (2018)investigated a command filtered robust adaptive neural network (NN) control for strict feedback nonlinear systems with input saturation. Zhao L. et al. (2021)presented an adaptive finite-time tracking control design with CFs. The adaptive fuzzy backstepping control approach of uncertain strict feedback nonlinear systems is developed by Wang et al. (2016). However, the applications of the backstepping technique in energy systems are not taken into consideration in these works. In addition, the systems of interest in these works are single-input single-output systems, which may give conservative results. Therefore, in this study, for multi-input multi-output (MIMO) strict feedback nonlinear unmodeled dynamical systems, a command filtered control method is developed and applied to energy systems.
The contributions of this study are two-fold. First, this study designs an adaptive backstepping control scheme for MIMO strict feedback nonlinear unmodeled dynamical systems with CFs, the compensating signal design and controller design are improved such that they can get higher tracking precision. Second, this study investigates the applications of the presented CF-based adaptive backstepping control approach on power systems, and a MIMO circuit system is used in the simulation experiments to verify the effectiveness of the method developed.
The rest of this article is organized as follows. Section 2 provides the problem formulation and necessary assumptions. In Section 3, the control design is proposed. The stability analysis of the system with the presented design is carried out in Section 4. In Section 5, a voltage source converter-high voltage direct current transmission system is used to verify the efficacy of the proposed method. The conclusion is made in Section 6.
2 Problem Formulation
In this study, the circuit system under consideration is modeled as
where
In this study, the following assumptions are needed.
Assumption 1. Jiang and Praly (1998): The dynamic uncertainty Δi in Eq. 1 is assumed to satisfy
with unknown smooth functions
Assumption 2. Jiang and Praly (1998): There exists an input-to-state practically stable Lyapunov function
with ω1 and ω2 belonging to class
where
Lemma 1. Hardy et al. (1952): For any ξ0 > 0, one has
where χ > 0 is a constant.
Lemma 2. Jiang and Praly (1998):For the unmeasured partial state
In addition, there is a limited time
The control objective of this study can be formulated as follows.Control Objective: Consider the reference output Xd satisfying
1. the system output X1 can track the reference Xd asymptotically, and
2. all signals in the closed-loop system keep bounded.
3 Neuro-Adaptive Controller Design
First, the tracking errors Ei, filter errors Zi, and the compensated tracking errors Λi are defined for each subsystem as
where Ai is the filter state, A0 = Xd, Si is the virtual control, and Bi is the compensating signal.
For the subsequent design and analysis, denote
3.1 Adaptive Backstepping Design
3.1.1 Step 1
Based on Eqs 1, 7, taking a derivative of E1 yields
For the first subsystem, the virtual control S1 is designed as
with
with a positive constant τ1. To eliminate the effect of filter errors, the compensating signal is developed as
To compensate for the unknown dynamics, the adaptive law for Θ1 is presented as
where γ1 > 0 is a constant.
3.1.2 Step
From Eqs 1, 7, differentiating Ei leads to
The virtual control design Si is developed as
where
with a positive design parameter τi. To diminish the influences of filter errors, the compensating signal is proposed as
To deal with the parameter estimation, the adaptive law to estimate Θi is designed as
with a constant γi > 0.
3.1.3 Step n
According to Eqs 1, 7, the differentiation of En can be transformed as
The controller design is given as
with design parameters
The adaptive law is developed as
where γn > 0 is a constant.
4 Stability Analysis
In this section, we analyze the stability of the closed-loop system (Eq. 1) with the presented design of the virtual control (Eqs 9, 14), controller (Eq. 19), adaptive laws (Eqs 12, 17, 21), CFs (Eq. 10) and (15), and compensating signals (Eqs 11, 16, 20).
4.1 Step 1
Inserting Eq. 9 into Eq. 8, we obtain
From the aforementioned equation and Eq. 11, one has
The Lyapunov function is defined as
For the term
with
Consider the term
It is to be noted that ϕ12(⋅) is strictly increasing and non-negative from Assumption 1, together with the fact that
From Lemma 1, we can obtain
where
where
Using RBFNNs satisfies
where
with
where
with
Based on the definition of Θ1, combining with Young’s inequality, we have
Inserting Eq. 33 into Eq. 31 yields
4.2 Step
Inserting the virtual control design Eq. 14 into Eq. 13, we have
On the basis of Eq. 16 and the aforementioned equation, one can obtain
To analyze the stability of the i-th subsystem through the Lyapunov theory, define the Lyapunov function for Λi and
Consider the term
with
For the term
Since ϕi2 is strictly increasing and non-negative from Assumption 1, based on the fact
On the basis of Lemma 1, we can obtain
with
Using Young’s inequality, we have
where
From Eqs 36–42, the derivative of Vi becomes
Applying RBFNNs yields
where
where
with
where
Based on the definition of Θi, using Young’s inequality, one has
Inserting Eq. 46 into Eq. 44, one can obtain
4.3 Step n
Inserting Eq. 19 into Eq. 18 results in
Based on the aforementioned equation and Eq. 20, we have
To investigate system stability through the Lyapunov theory, the Lyapunov function is defined for Λn and
For the term
with
For the term
Based on the facts that ϕn2(⋅) is strictly increasing and non-negative from Assumption 1 and
From Lemma 1, we can obtain
where
Applying Young’s inequality, we have
with
Inserting Eqs 19, 51, 52 into Eq. 56 results in
where
with
where
with
From the definition of Θn, combining with Young’s inequality, we can obtain
Applying Young’s inequality, substituting Eqs 21, 59 into Eq. 57 yields
Theorem 1. Under Assumptions 1–2, with the virtual control (Eqs 9, 14), the CF design (Eqs 10, 15), the adaptive laws (Eqs 12, 17, 21), the compensating signals (Eqs 11, 16, 20), and the controller (Eq. 19), the following facts hold.
1. The tracking errors will converge to the neighborhood of the origin asymptotically.
2. The boundedness of all signals in the closed-loop system (Eq. 1) can be guaranteed.
Proof. Define
Based on Eqs 34, 47, 60, the overall Lyapunov function satisfies
where Im is the m-dimension identity matrix,
Therefore, Λi,
where
is continuous on the compact set
and R0 > 0, Ri > 0. Thus,
5 Simulation Study
The system considered in this section is a voltage source converter-high voltage direct current transmission system with the following dynamics (Hu et al. (2020)).
where L1 and L2 are the electrical inductances, and C1 and C2 are the capacitances. Applying variable transformation
By applying the presented control scheme, the control design is developed as
with the compensating signal design
In addition, the CF design and adaptive law design are the same as Eqs 10, 11, 15, 16, 20.
The design parameters are given as L1 = 4 mH, L2 = 8 mH, C2 = 0.1μF,
The RBFNNs are chosen in typical Gaussian form. To be specific, the RBFNN
The simulation results are shown in Figure 1. From Figure 1, it can be observed that the output tracking objective can be achieved and the system output can track the reference output asymptotically. The dynamic uncertainties can also converge with the convergence of system states.
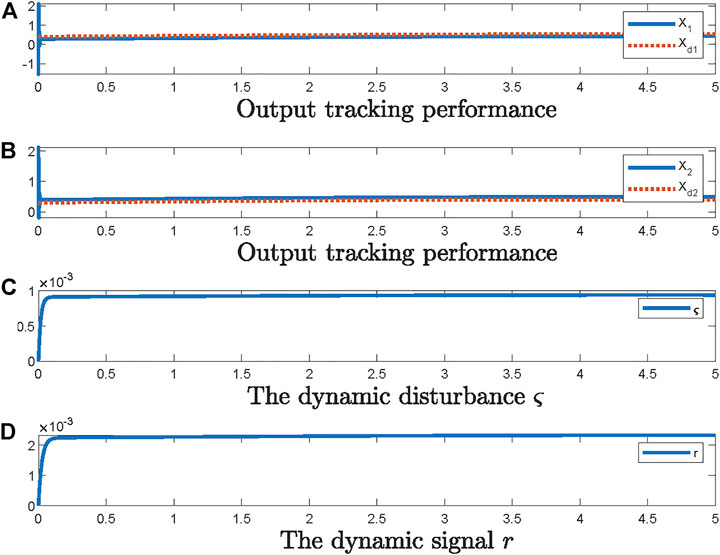
FIGURE 1. Output tracking performance and evolution of dynamic uncertainties.
6 Conclusion
In this study, a control approach for MIMO strict feedback nonlinear unmodeled dynamical systems with CFs is developed. The dynamic signal design introduced together with RBFNNs can efficiently prevent the effect of the dynamic uncertainties. The CFs employed in the controller design can not only prevent the explosion of complexity, but can also eliminate the effect of filter errors through the compensating signal design. Compared with single-input single-output strict feedback nonlinear systems, the approach proposed in this study is suitable for more general cases. Finally, in the simulation experiments, the presented method is applied to power systems, where the simulation results validate the effect of the scheme proposed.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author Contributions
XF, LS, and YZ contributed to conception and design of this study. XF investigated the theoretical analysis for the command filter design. LS performed the simulation study with application to an energy system. YZ organized the writing of the manuscript. XF, LS, and YZ collaborated to write all the sections of the manuscript. All authors contributed to manuscript revision, and read and approved the submitted version.
Funding
This work was supported by the Youth Innovation Promotion Association of Chinese Academy of Sciences under Grant 2020134.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Deese, J., and Vermillion, C. (2021). Recursive Gaussian Process-Based Adaptive Control, with Application to a lighter-Than-air Wind Energy System. IEEE Trans. Contr. Syst. Technol. 29, 1823–1830. doi:10.1109/TCST.2020.3014159
Farrell, J. A., Polycarpou, M., Sharma, M., and Wenjie Dong, W. (2009). Command Filtered Backstepping. IEEE Trans. Automat. Contr. 54, 1391–1395. doi:10.1109/tac.2009.2015562
Ghaffarzdeh, H., and Mehrizi-Sani, A. (2020). Mitigation of Subsynchronous Resonance Induced by a Type Iii Wind System. IEEE Trans. Sustain. Energ. 11, 1717–1727. doi:10.1109/TSTE.2019.2938014
Ghosh, S., and Kamalasadan, S. (2017). An Integrated Dynamic Modeling and Adaptive Controller Approach for Flywheel Augmented Dfig Based Wind System. IEEE Trans. Power Syst. 32, 2161–2171. doi:10.1109/TPWRS.2016.2598566
Han, Q., and Liu, X. (2020). Robust I&I Adaptive Control for a Class of Quadrotors with Disturbances. IEEE Access 8, 216519–216528. doi:10.1109/ACCESS.2020.3041030
Hardy, G. H., Littlewood, J. E., and Pólya, G. (1952). Inequalities. Cambridge: Cambridge University Press.
Hu, C., Ma, Y., Yu, J., and Zhao, L. (2020). Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics 9, 9020333. doi:10.3390/electronics9020333
Jiang, Z.-P., and Praly, L. (1998). Design of Robust Adaptive Controllers for Nonlinear Systems with Dynamic Uncertainties. Automatica 34, 825–840. doi:10.1016/s0005-1098(98)00018-1
L'Afflitto, A. (2018). Barrier Lyapunov Functions and Constrained Model Reference Adaptive Control. IEEE Control. Syst. Lett. 2, 441–446. doi:10.1109/LCSYS.2018.2842148
Li, C., Wu, Y., Sun, Y., Zhang, H., Liu, Y., Liu, Y., et al. (2020). Continuous Under-frequency Load Shedding Scheme for Power System Adaptive Frequency Control. IEEE Trans. Power Syst. 35, 950–961. doi:10.1109/TPWRS.2019.2943150
Liu, L., Liu, Y.-J., Tong, S., and Gao, Z. (2022). Relative Threshold-Based Event-Triggered Control for Nonlinear Constrained Systems with Application to Aircraft wing Rock Motion. IEEE Trans. Ind. Inf. 18, 911–921. doi:10.1109/TII.2021.3080841
Liu, L., Zhao, W., Liu, Y.-J., Tong, S., and Wang, Y.-Y. (2021). Adaptive Finite-Time Neural Network Control of Nonlinear Systems with Multiple Objective Constraints and Application to Electromechanical System. IEEE Trans. Neural Netw. Learn. Syst. 32, 5416–5426. doi:10.1109/TNNLS.2020.3027689
Mukherjee, S., Chowdhury, V. R., Shamsi, P., and Ferdowsi, M. (2017). Model Reference Adaptive Control Based Estimation of Equivalent Resistance and Reactance in Grid-Connected Inverters. IEEE Trans. Energ. Convers. 32, 1407–1417. doi:10.1109/TEC.2017.2710200
Namazi, M. M., Nejad, S. M. S., Tabesh, A., Rashidi, A., and Liserre, M. (2018). Passivity-based Control of Switched Reluctance-Based Wind System Supplying Constant Power Load. IEEE Trans. Ind. Electron. 65, 9550–9560. doi:10.1109/TIE.2018.2816008
Nascimento Moutinho, M., da Costa, C. T., Barra, W., and Augusto Lima Barreiros, J. (2008). Self-tunning Control Methodologies Applied to the Automatic Voltage Control of a Synchronous Generator. IEEE Latin Am. Trans. 6, 408–418. doi:10.1109/TLA.2008.4839110
Quan, X., Yu, R., Zhao, X., Lei, Y., Chen, T., Li, C., et al. (2020). Photovoltaic Synchronous Generator: Architecture and Control Strategy for a Grid-Forming Pv Energy System. IEEE J. Emerg. Sel. Top. Power Electron. 8, 936–948. doi:10.1109/JESTPE.2019.2953178
Wang, D., and Huang, J. (2005). Neural Network-Based Adaptive Dynamic Surface Control for a Class of Uncertain Nonlinear Systems in Strict-Feedback Form. IEEE Trans. Neural Netw. 16, 195–202. doi:10.1109/tnn.2004.839354
Wang, L., Li, H., Zhou, Q., and Lu, R. (2017). Adaptive Fuzzy Control for Nonstrict Feedback Systems with Unmodeled Dynamics and Fuzzy Dead Zone via Output Feedback. IEEE Trans. Cybern. 47, 2400–2412. doi:10.1109/TCYB.2017.2684131
Wang, Y., Cao, L., Zhang, S., Hu, X., and Yu, F. (2016). Command Filtered Adaptive Fuzzy Backstepping Control Method of Uncertain Non‐linear Systems. IET Control. Theor. & amp; Appl. 10, 1134–1141. doi:10.1049/iet-cta.2015.0946
Wu, C., Chen, J., Xu, C., and Liu, Z. (2017). Real-time Adaptive Control of a Fuel Cell/battery Hybrid Power System with Guaranteed Stability. IEEE Trans. Contr. Syst. Technol. 25, 1394–1405. doi:10.1109/TCST.2016.2611558
Xia, X., and Zhang, T. (2018). Adaptive Quantized Output Feedback Dsc of Uncertain Systems with Output Constraints and Unmodeled Dynamics Based on Reduced-Order K-Filters. Neurocomputing 310, 236–245. doi:10.1016/j.neucom.2018.05.031
Xu, D., Liu, J., Yan, X.-G., and Yan, W. (2018). A Novel Adaptive Neural Network Constrained Control for a Multi-Area Interconnected Power System with Hybrid Energy Storage. IEEE Trans. Ind. Electron. 65, 6625–6634. doi:10.1109/TIE.2017.2767544
Yang, Y., Gao, W., Modares, H., and Xu, C.-Z. (2021a). Robust Actor-Critic Learning for Continuous-Time Nonlinear Systems with Unmodeled Dynamics. IEEE Trans. Fuzzy Syst. 2021, 1. doi:10.1109/TFUZZ.2021.3075501
Yang, Y., Kiumarsi, B., Modares, H., and Xu, C. (2021b). Model-Free λ-Policy Iteration for Discrete-Time Linear Quadratic Regulation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–15. doi:10.1109/TNNLS.2021.3098985
Yang, Y., Liu, Z., Li, Q., and Wunsch, D. C. (2021c). Output Constrained Adaptive Controller Design for Nonlinear Saturation Systems. Ieee/caa J. Autom. Sinica 8, 441–454. doi:10.1109/JAS.2020.1003524
Yang, Y., Modares, H., Vamvoudakis, K. G., He, W., Xu, C.-Z., and Wunsch, D. C. (2021d). Hamiltonian-driven Adaptive Dynamic Programming with Approximation Errors. IEEE Trans. Cybern. 2021, 1–12. doi:10.1109/TCYB.2021.3108034
Yang, Y., Vamvoudakis, K. G., Modares, H., Yin, Y., and Wunsch, D. C. (2021e). Hamiltonian-driven Hybrid Adaptive Dynamic Programming. IEEE Trans. Syst. Man. Cybern, Syst. 51, 6423–6434. doi:10.1109/TSMC.2019.2962103
Yang, Y., Vamvoudakis, K. G., Modares, H., Yin, Y., and Wunsch, D. C. (2020). Safe Intermittent Reinforcement Learning with Static and Dynamic Event Generators. IEEE Trans. Neural Netw. Learn. Syst. 31, 5441–5455. doi:10.1109/TNNLS.2020.2967871
Zhao, J., Tong, S., and Li, Y. (2021a). Fuzzy Adaptive Output Feedback Control for Uncertain Nonlinear Systems with Unknown Control Gain Functions and Unmodeled Dynamics. Inf. Sci. 558, 140–156. doi:10.1016/j.ins.2020.12.092
Zhao, L., Yu, J., and Wang, Q.-G. (2021b). Finite-time Tracking Control for Nonlinear Systems via Adaptive Neural Output Feedback and Command Filtered Backstepping. IEEE Trans. Neural Netw. Learn. Syst. 32, 1474–1485. doi:10.1109/tnnls.2020.2984773
Zhu, G., Du, J., and Kao, Y. (2018). Command Filtered Robust Adaptive Nn Control for a Class of Uncertain Strict-Feedback Nonlinear Systems under Input Saturation. J. Franklin Inst. 355, 7548–7569. doi:10.1016/j.jfranklin.2018.07.033
Zou, W., Shi, P., Xiang, Z., and Shi, Y. (2020a). Consensus Tracking Control of Switched Stochastic Nonlinear Multiagent Systems via Event-Triggered Strategy. IEEE Trans. Neural Netw. Learn. Syst. 31, 1036–1045. doi:10.1109/tnnls.2019.2917137
Keywords: power system, dynamic uncertainty, command filter, MIMO system, strict feedback nonlinear system
Citation: Feng X, Shi L and Zhang Y (2022) Intelligent Command Filter Design for Strict Feedback Unmodeled Dynamic MIMO Systems With Applications to Energy Systems. Front. Energy Res. 10:899732. doi: 10.3389/fenrg.2022.899732
Received: 19 March 2022; Accepted: 11 April 2022;
Published: 24 May 2022.
Edited by:
Yushuai Li, University of Oslo, NorwayReviewed by:
Liqiang Tang, University of Science and Technology Beijing, ChinaYongshan Zhang, University of Macau, China
Copyright © 2022 Feng, Shi and Zhang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yumeng Zhang, emhhbmd5bTIwMzQwOUBhaXJjYXMuYWMuY24=