 Orna Kupferman
Orna Kupferman
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
REVIEW article
Front. Comput. Sci. , 13 January 2023
Sec. Theoretical Computer Science
Volume 4 - 2022 | https://doi.org/10.3389/fcomp.2022.1114625
This article is part of the Research Topic Horizons in Computer Science 2022 View all 8 articles
Nondeterminism models an ability to see the future: An automaton with an infinite look ahead can successfully resolve its nondeterministic choices. An automaton is history deterministic (HD) if it can successfully resolve its nondeterministic choices in a way that only depends on the past. Formally, an HD automaton has a strategy that maps each finite word to the transition to be taken after the word is read and following this strategy results in accepting all the words in the language of the automaton. Beyond being theoretically interesting and intriguing, HD automata can replace deterministic automata in several applications, most notably reactive synthesis, and they attract a lot of interest in the research community. The survey describes the development of HD ω-regular automata, relates history determinism to other types of bounded nondeterminism, studies the determinization of HD automata and their succinctness with respect to deterministic ones, and discusses variants, extensions, and open problems around HD automata.
Automata are among the most studied computation models in theoretical computer science. Their simple structure has made them a basic formalism for the study of fundamental notions. One such notion is nondeterminism, introduced by Rabin and Scott (1959) “A nondeterministic automaton has, at each stage of its operation, several choices of possible actions. This versatility enables us to construct very powerful automata using only a small number of internal states" (Rabin and Scott, 1959). Nondeterminism allows a computing machine to examine several possible actions simultaneously, and some fundamental questions around it (most notably, P vs. NP) are still open. In the setting of automata on finite words, nondeterminism enables the definition of exponentially more succinct automata; however, it does not add to the expressive power of deterministic automata (called “ordinary” in Rabin and Scott, 1959): “One might imagine at first sight that these new machines are more general than the ordinary ones, but this is not the case.”
In 1962, Büchi introduced automata on infinite words (Büchi, 1962). Acceptance in such automata is determined according to the set of states that are visited infinitely often along the run. In particular, in Büchi automata (NBW and DBW, for nondeterministic and deterministic Büchi word automata, respectively), the acceptance condition is a subset α of states, and a run is accepted if it visits α infinitely often. The transition to infinite words significantly extends the combinatorial richness of automata. In particular, in 1969, Landweber proved that NBWs are strictly more expressive than DBWs (Landweber, 1969). That is, there exists a language of infinite words that is recognizable by an NBW but cannot be recognized by a DBW. Today, the gap between deterministic and nondeterministic Büchi word automata is well understood: While NBWs can recognize all ω-regular languages, an ω-regular language L of infinite words can be recognized by a DBW if there exists a regular language R of finite words such that L contains exactly all words that have infinitely many prefixes in R (Landweber, 1969).
Using NBWs, Büchi solved the decidability problem for monadic second-order logic with one successor (S1S). Given an S1S formula φ, Büchi constructed an NBW 𝒜φ that accepts exactly all the models of φ, and thus reduced the satisfiability of φ to the nonemptiness of 𝒜φ. The computer science community has become further interested in automata on infinite objects thanks to their applications in reasoning about reactive systems. By translating specifications to automata, questions about specifications, verification, and synthesis are reduced to questions about automata (Vardi and Wolper, 1994; Kupferman, 2018). In particular, while the translation from S1S formulas to automata is nonelementary, it is only exponential for specification formalisms such as linear temporal logic (Pnueli, 1981). In some applications, such as verification, algorithms can be based on nondeterministic automata, whereas in other applications, such as synthesis and control, algorithms are based on deterministic automata. The advantages of nondeterminism are lost, and the algorithms involve a complicated determinization construction (Safra, 1988) or acrobatics for circumventing determinization (Kupferman and Vardi, 2005; Esparza et al., 2018).
To understand the difficulty of using nondeterministic automata in synthesis, let us review the synthesis problem and its automata-based solution (Grädel et al., 2002). Consider a language L of infinite words over an alphabet 2I∪O, where I and O are sets of input and output signals, respectively. The synthesis problem for the specification L is to build a reactive system that receives from its environment assignments to the signals in I (that is, letters in 2I), responds with assignments to the signals in O (that is, letters in 2O), and does so in such a way that the generated computation (an infinite word over the alphabet 2I∪O) is in L (Pnueli and Rosner, 1989). Algorithms for solving the problem are based on taking a deterministic automaton 𝒟 for L and conducting a two-player game on top of it. The game is played between a player that models the system and a player that models the environment. The positions of the game are the states of 𝒟, and it starts in the initial state. In each turn of the game, the environment first chooses the 2I component of the next letter, the system responds with the 2O component, and 𝒟 moves to the corresponding successor state. Together, the players generate an infinite word in (2I∪O)ω along with the run of 𝒟 on it. The system wins if this run is accepting. It can be shown that the system has a winning strategy, namely a strategy to respond so that it wins against every environment, if the language L can be synthesized. Now, if one replaces 𝒟 with a nondeterministic automaton 𝒜 for L, the system should also choose in each turn a transition to proceed with. Then, it might be that L is synthesizable, and still the system has no winning strategy. Indeed, the transition that the system chooses should work for all possible futures of the game, whereas possibly each nondeterministic choice of 𝒜 works for a strict subset of the possible futures.
Let us go back to the 1960s when the solution of the decidability problem for S1S led to increasing efforts to solve also the decidability problem for SnS, namely monadic second-order logic with multiple successors. While S1S formulas describe linear structures and thus correspond to infinite words, SnS formulas describe branching structures and correspond to infinite trees. Accordingly, researchers started to study automata on infinite trees, which define languages of infinite trees. In particular, they searched for translations of SnS formulas to nondeterministic Büchi tree automata (NBTs), aiming to reduce satisfiability to their nonemptiness.
In 1969, Rabin solved the decidability problem for SnS (Rabin, 1969). The solution involved an introduction of a new type of acceptance condition for automata on infinite objects, namely the Rabin acceptance condition. The condition is more complex than the Büchi acceptance condition and involves two types of constraints on the set of states that are visited infinitely often in the run. Given an SnS formula φ, Rabin constructed a nondeterministic Rabin tree automaton (NRT) 𝒜φ that accepts exactly all the models of φ, and thus reduced the satisfiability of φ to the nonemptiness of 𝒜φ. Then, in 1970, Rabin proved that in fact SnS cannot be translated to NBTs (Rabin, 1970). Specifically, NBTs can recognize only the weak fragment of SnS—one in which the sets we quantify over are finite. Thus, while nondeterministic Büchi and Rabin word automata have the same expressive power, NRTs are strictly more expressive than NBTs.
Proving that NBWs are strictly more expressive than DBWs, Landweber showed that the language L1=(0+1)*·1ω (only finitely many 0's) is in NBW\DBW. The proof is simple and can be stated in a few lines or using a two-state expressiveness refuter (Kupferman and Sickert, 2021). Much harder is the proof that NRTs are strictly more expressive than NBTs. In Rabin (1970), Rabin had to use a complicated construction and a complicated inductive argument. Interestingly, the language of trees that Rabin used in his proof is the derived language of L1. That is, the set of all trees, all whose paths have only finitely many 0's.
In 1996, it turned out that Rabin's choice of L1 was not arbitrary: For every language L of infinite words, let L△ denote the derived language of L, namely the language of trees all whose paths are in L. In Kupferman et al. (1996, 2006), Kupferman, Safra, and Vardi proved that for every language L of infinite words, we have that L∈NBW\DBW if L△∈NRT\NBT. The difficult part of the proof is to show that if L△ can be recognized by an NBT, then L can be recognized by a DBW. Intuitively, since the branches of a tree in L△ may contain any word in L, the nondeterministic choices that an NBT performs when it recognizes L△ have to accommodate all possible futures, which makes the usefulness of nondeterminism questionable. The results in Kupferman et al. (1996, 2006) were generalized in Niwinski and Walukiewicz (1998) to acceptance conditions that are stronger than the Büchi condition. Niwinski and Walukiewicz showed that if L△ can be recognized by a nondeterministic tree automaton with some acceptance condition γ (e.g., γ may be parity with index 5), then L can be recognized by a deterministic word automaton with acceptance condition γ. The difficulty in defining a nondeterministic tree automaton for a derived language is similar to the difficulty of the system player in the synthesis game when played on a nondeterministic automaton: Both have to resolve their nondeterministic choices in a way that only depends on the past and still accommodates all futures.
In Henzinger and Piterman (2006), Henzinger and Piterman introduced history deterministic (HD) automata, which capture this difficulty in a very clean way. Essentially, a nondeterministic automaton is HD if it has a strategy to resolve its nondeterministic choices that only depends on the past. The notion used in Henzinger and Piterman (2006) is good for games (GFG) automata, as they address the difficulty described earlier, of playing games on top of a nondeterministic automaton. As it turns out, the property of being good for games varies in different settings and HD is good for applications beyond games (see more in Section 5). Therefore, following Boker and Lehtinen (2023), we use the term history determinism, introduced by Colcombet in the setting of quantitative automata with cost functions (Colcombet, 2009).
Formally, a nondeterministic automaton 𝒜 over an alphabet Σ is HD if there is a strategy f that maps each finite word u∈Σ* to the transition to be taken after u is read, and following f results in accepting all the words in the language of 𝒜. Note that a state q of 𝒜 may be reachable via different words, and f may suggest different transitions from q after different words are read. Still, the choices of f only depend on the past, namely on the word read so far, and have to address all possible futures, namely all possible suffixes. As formalized in Boker et al. (2013), the strategy f of an HD automaton for L is similar to a run of a tree automaton for L△ on a tree that includes all words in L.1 As their original “good for games" name suggests, HD automata can be used in the reduction of synthesis to game solving. Indeed, if one tries to replace the deterministic automaton 𝒟 discussed earlier by an HD automaton 𝒜, the system should still choose in each turn a transition to proceed with, but now it is guaranteed that there is a transition that would work for all possible futures.
Obviously, there exist HD automata: deterministic ones or nondeterministic ones, that are determinizable by pruning (DBP); that is, ones that just add transitions on top of a deterministic automaton. In fact, the HD automata constructed in Henzinger and Piterman (2006) are DBP.2 Beyond the theoretical interest in DBP automata, they are used for modeling online algorithms: By relating the “unbounded look ahead” of optimal offline algorithms with nondeterminism, and relating the “no look ahead” of online algorithms with determinism, it is possible to reduce questions about the competitive ratio of online algorithms and the memory they require to questions about DBPness (Aminof et al., 2010, 2011). As it turns out, HD automata on infinite words need not be DBP, and they constitute an interesting and intriguing class of automata, many of whose properties are still unknown.
This survey presents selected results about HD automata. We focus on Büchi auotmata, and their dual co-Büchi automata, denoted on DCW and NCW, for the deterministic and nondeterministic classes. Section 3 studies determinization by pruning. It shows that HD nondeterministic automaton on finite words are always DBP. Moreover, a deterministic equivalent automaton that is embodied in every HD automaton can be found in polynomial time. In contrast, once we move to automata on infinite words, HD-NBWs and HD-NCWs need not be DBP, and deciding their DBPness is NP-complete. Section 4 studies determinization of HD-NBWs and HD-NCWs. It shows that their determinization is simpler than that of NBWs and NCWs and that HD affects Büchi and co-Büchi automata in a different and surprising way: Recall that nondeterminism is more significant for Büchi than for co-Büchi automata: NBWs are strictly more expressive than DBWs (Landweber, 1969), and the determinization of NBWs is very complicated and involves, beyond using a richer acceptance condition, also a 2O(nlogn) blowup (Safra, 1988). NCWs, in contrast, are as expressive as DCWs, and their determinization only involves a 2O(n) blowup (Miyano and Hayashi, 1984). One could then expect that HD nondeterminism would also be more significant for Büchi than co-Büchi automata. As shown in Section 4, this is not the case: While HD-NCWs are exponentially more succinct than DCWs, every HD-NBWs can be determinized to be a DBW with a quadratic blowup, and, in fact, no matching lower bound is known. The section also relates the determinization and complementation of HD automata. Finally, Section 5 discusses variants, extensions, and open problems.
For a finite nonempty alphabet Σ, an infinite word w=σ1·σ2⋯∈Σω is an infinite sequence of letters from Σ. A language L⊆Σω is a set of infinite words. For i, j≥0, we use w[1, i] to denote the (possibly empty) prefix σ1·σ2⋯σi of w, use w[i+1, j] to denote the (possibly empty) infix σi+1·σi+2⋯σj of w, and use w[i+1, ∞] to denote its suffix σi+1·σi+2⋯ . We sometimes refer also to languages of finite words, namely subsets of Σ*. We denote the empty word by ϵ.
A nondeterministic automaton over infinite words is 𝒜=〈Σ,Q,q0,δ,α〉, where Σ is an alphabet, Q is a finite set of states, q0∈Q is an initial state, δ:Q×Σ → 2Q \ ∅ is a transition function, and α is an acceptance condition, to be defined later. For states q and s and a letter σ∈Σ, we say that s is a σ-successor of q if s∈δ(q, σ). Note that 𝒜 is total, in the sense that it has at least one successor for each state and letter. If |δ(q, σ)| = 1 for every state q∈Q and letter σ∈Σ, then 𝒜 is deterministic.
When 𝒜 runs on an input word, it starts in the initial state and proceeds according to the transition function. Formally, a run of 𝒜 on w=σ1·σ2⋯∈Σω is an infinite sequence of states r=r0,r1,r2,…∈Qω, such that r0 = q0, and for all i≥0, we have that ri+1∈δ(ri, σi+1). We extend δ to sets of states and finite words in an expected way. Thus, δ(S, u) is the set of states that 𝒜 may reach when it reads the word u∈Σ* from some state in S∈2Q. Formally, δ:2Q×Σ* → 2Q is such that for every S∈2Q, finite word u∈Σ*, and letter σ∈Σ, we have that δ(S, ϵ) = S, δ(S, σ) = ⋃s∈Sδ(s, σ), and δ(S, u·σ) = δ(δ(S, u), σ). The transition function δ induces a transition relation Δ ⊆ Q × Σ × Q, where for every two states q, s∈Q and letter σ∈Σ, we have that 〈q, σ, s〉∈Δ if s∈δ(q, σ). For a state q∈Q of 𝒜, we define 𝒜q to be the automaton obtained from 𝒜 by setting the initial state to be q. Thus, 𝒜q=〈Σ,Q,q,δ,α〉.
The acceptance condition α determines which runs are “good.” We consider here the Büchi and co-Büchi acceptance conditions, in both a state-based and a transition-based setting. In the traditional state-based setting, we have that α⊆Q is a subset of states. For a run r, let inf(r)⊆Q be the set of states that r visits infinitely often. Thus, inf(r) = {q∈Q:q = ri for infinitely manyi's}. A run r of a Büchi automaton is accepting if it visits states in α infinitely often, thus inf(r)∩α≠∅. Dually, a run r of a co-Büchi automaton is accepting if it visits states in α only finitely often, thus inf(r)∩α = ∅. In the transition-based setting, we have that α⊆Δ is a set of transitions, inf(r) is defined as the set of transitions that are traversed infinitely often in r, and the definition of acceptance is similar. Thus, in Büchi automata, a run is accepting if it traverses infinitely many transitions in α, and in co-Büchi automata, a run is accepting if it traverses only finitely many transitions in α. In both the state-based and transition-based settings, a run that is not accepting is rejecting. As 𝒜 is nondeterministic, it may have several runs on a word w. The word w is accepted by 𝒜 if there is an accepting run of 𝒜 on w. The language of 𝒜, denoted L(𝒜), is the set of words that 𝒜 accepts. Two automata are equivalent if their languages are equivalent.
Consider a nondeterministic automaton 𝒜=〈Σ,Q,q0,δ,α〉, we say that 𝒜 is semantically deterministic, if its nondeterministic choices lead to states with the same language. Formally, for every state q∈Q and letter σ∈Σ, all the σ-successors of q have the same language.
Then, we say that 𝒜 is history deterministic (HD, for short) if there is a strategy f:Σ*→Q that resolves the nondeterminism in 𝒜 in a way that only depends on the past and leads to the acceptance of all words in L(𝒜). Formally, the following hold:
• Strategy f is compatible with δ. That is, for all u∈Σ* and σ∈Σ, we have that f(u·σ)∈δ(f(u), σ).
• Following f guarantees the acceptance of all the words in L(𝒜). That is, for all words σ1·σ2·σ3⋯∈L(𝒜), the sequence f(ϵ), f(σ1), f(σ1·σ2), f(σ1·σ2·σ3), … satisfies the acceptance condition α.
Finally, 𝒜 is determinizable by pruning (DBP, for short) if it embodies an equivalent deterministic automaton; thus, it can be determinized to an equivalent automaton by removing some of its transitions.
It is easy to see that every DBP automaton is HD. Indeed, a witness strategy f can follow the unpruned transitions. In addition, every HD automaton can be pruned in polynomial time to a semantically deterministic automaton (Kuperberg and Skrzypczak, 2015). Indeed, the fact the automaton is HD implies that for every state q∈Q, we can prune transitions to σ-successors of q whose language does not contain the language of another σ-successor of q. Indeed, these transitions are never taken by an HD strategy. Since language containment for HD automata can be checked in polynomial time, such pruning can be done in polynomial time.
We denote the different classes of automata by three-letter acronyms in {D, N} × {F, B, C} × {W}. The first letter stands for the branching mode of the automaton (deterministic or nondeterministic); the second for the acceptance condition type (finite, Büchi, or co-Büchi); and the third indicates that we consider automata on words. For example, NBWs are nondeterministic Büchi word automata. When the acceptance condition is transition-based, we add “t” before the acronym, and when the automata are HD, we indicate it too. For example, HD-tNCWs are HD-NCWs with a transition-based acceptance condition.
The fact nondeterminism leads to exponential succinctness implies that not all nondeterministic automata are DBP. In this section, we study DBPness for HD automata. Recall that the strategy f that witnesses the HDness of an automaton 𝒜 directs runs of 𝒜 how to resolve nondeterministic choices based on the prefix of the word read so far and may proceed with different nondeterministic choices in different visits to the same state. We can view the question of DBPness in HD automata as the question of whether the HD strategy really needs to make these different choices, namely whether the choices depend on the past. Indeed, an HD automaton is DBP if the past does not really play a role in the resolving of nondeterminism and the same choice can be taken whenever nondeterminism has to be resolved. As we shall see, the answer is positive for automata on finite words and negative for Büchi and co-Büchi automata.
In this section, we prove that for automata on finite words, all HD-NFWs are DBP. For this, we describe a sufficient condition for NFWs to be DBP and argue that all HD-NFWs satisfy the condition. The condition is a simplification of a fixed-point characterization of NFWs that are DBPs introduced in Aminof et al. (2010), where it is used in order to decide whether a given NFW is a DBP.
Consider an NFW 𝒜=〈Σ,Q,Q0,δ,α〉. For a relation H⊆Q×Q, a set S⊆Q, and a states q′∈Q, we write H(S, q′) to indicate that H(q, q′) for all q∈S. We inductively define a sequence H0, H1, …⊆Q×Q of relations as follows.
• H0 = (α × α)∪((Q\α) × Q). That is, H0={{〈q,q′〉: If q∈α, then q′∈α}.
• For i≥0, we have Hi+1=Hi∩{〈q,q′〉: For all σ∈Σ there is v′∈δ(q′, σ) such that Hi(δ(q,σ),v′)}.
Intuitively, Hi(q,q′) means that 𝒜 can be pruned to a DFW 𝒜′ such that all the words of length at most i accepted from q in 𝒜 are also accepted from q′ in 𝒜′.
Since H0 ⊆ Q × Q and H0 ⊇ H1 ⊇ H2 ⊇ …, the sequence of relations eventually reaches a fixed-point, which we denote by H. Intuitively, H(q, q′) if there is a DFW embodied in 𝒜q′ that accepts all words in L(𝒜q).
The relation H induces an NFW 𝒜H=〈Σ,Q,QH0,δH,α〉 embodied in 𝒜, where
• QH0={v:v∈Q0 and H(Q0,v)}..
• For all q∈Q and σ∈Σ, we have that δH(q, σ) = {v:v∈δ(q, σ) and H(δ(q, σ), v)}.
Note that the set QH0 may be empty and that for some state q∈Q and letter σ∈Σ, it may be that δH(q, σ) = ∅. We prove that the nonemptiness of QH0 is a sufficient condition for 𝒜 to be DBP.
Lemma 3.1. Consider an NFW 𝒜, its relation H, and the induced NFW 𝒜H. If QH0≠∅, then 𝒜 is DBP.
Proof. Assume that QH0 is not empty. We prove that every DFW that is embodied in 𝒜H is equivalent to 𝒜. Let 𝒜′=〈Σ,Q,q′0,δ′,α〉 be such a DFW. Thus, q′0∈QH0 and for all states q∈Q and letters σ∈Σ, we have δ′(q, σ)∈δH(q, σ). Note that if δH(q, σ) = ∅, then δ′(q, σ) is not defined. As we shall prove, however, the fact QH0 is not empty implies that δH(q, σ)≠∅ for all letters σ∈Σ states q∈Q that are reachable in 𝒜′.
We prove that L(𝒜′)=L(𝒜). Since 𝒜′ is embodied in 𝒜H, which in turn is embodied in 𝒜, it is clear that L(𝒜′)⊆L(𝒜). In order to prove that L(𝒜)⊆L(𝒜′), consider a word w=w1w2…wn∈L(𝒜). We prove that 𝒜′ does not get stuck on w and that for every run r = r0r1…rn of 𝒜 on w, the run s = s0s1…sn of 𝒜′ on w is such that for all 0 ≤ j ≤ n, we have that H(rj, sj). Since H⊆H0, the latter implies that membership of rn in α implies membership of sn in α. Thus, if there is an accepting run of 𝒜 on w, then the run of 𝒜′ on w is also accepting.
The proof proceeds by induction on j. For j = 0, the definition of 𝒜′ implies that s0=q′0∈QH0. Therefore, by the definition of QH0, we have that H(Q0, s0). In particular, as r0∈Q0, we have that H(r0, s0).
For the induction step, assume that the induction hypothesis holds for j≥0, thus H(rj, sj). We prove that the run s does not get stuck in the j-th transition and that the state sj+1 satisfies H(rj+1, sj+1). By the induction hypothesis, we have that H(rj, sj). Hence, by the definition of H, for every letter σ∈Σ, there exists a state v∈δ(sj, σ) such that H(δ(rj, σ), v). Hence, if δ(rj, σ) is not empty, so is δH(sj,σ). In particular, as δ(rj, wj+1) includes rj+1, we have that δH(sj,wj+1)≠∅, and so 𝒜′ does not get stuck on w in the j-th transition. In addition, by the definition of δH, the fact sj+1∈δH(sj,wj+1) implies that H(δ(rj, wj+1), sj+1). Since rj+1∈δ(rj, wj+1), it follows that H(rj+1, sj+1), and we are done. □
We continue and prove that all HD-NFWs are DBP. Given an HD-NFW 𝒜 as earlier, and a function f:Σ*→Q that witnesses its HDness consider the relation Gf⊆Q×Q where for all q, q′∈Q, we have that G(q, q′) if there is a word w∈Σ* such that q∈δ(Q0, w) and f(w) = q′. Intuitively, Gf(q,q′) if there is a word w∈Σ* such that the HD strategy f is guaranteed to accept from q′ all suffixes that extend w to a word in L(𝒜) and are accepted from q.
Lemma 3.2. If 𝒜 is an HD-NFW and f witnesses its HDness, then Gf⊆H and f(ϵ)∈QH0.
Proof. Consider an HD-NFW 𝒜 and a function f:Σ*→Q that witnesses its HDness. We first prove that Gf⊆Hi for all i≥0, thus Gf⊆H. The proof proceeds by induction on i.
For the induction base, consider two states q, q′∈Q such that Gf(q,q′). Let w∈Σ* be such that q∈δ(Q0, w) and f(w) = q′. By the definition of Gf, such a word w exists. Assume that q∈α. Then, w∈L(𝒜), and so, as f witnesses the HDness of 𝒜, we have that f(w)∈α too. Thus, q∈α implies that q′∈α, and so H0(q,q′), and we are done.
For the induction step, consider again two states q, q′∈Q such that Gf(q,q′), and let w∈Σ* be such that q∈δ(Q0, w) and f(w) = q′. First, by the induction hypothesis, we have that Hi(q,q′). Now, by definition, Hi+1(q,q′) if Hi(q,q′) and for all letters σ∈Σ there is v′∈δ(q′, σ) such that Hi(δ(q,σ),v′). For a letter σ∈Σ, let v′ = f(w·σ). Note that by the definition of HD witness functions, the state v′ is in δ(q′, σ). Consider a state v∈δ(q, σ). Note that v∈δ(Q0, w·σ), and so Gf(v,v′). Therefore, by the induction hypothesis, we have Hi(v,v′). It follows that Hi(δ(q,σ),v′). Since the earlier holds for all letters σ∈Σ, it follows that Hi+1(q,q′), and are done.
It is left to prove that f(ϵ)∈QH0. Recall that for every state q∈Q, we have that q∈QH0 if q∈Q0 and H(Q0, q). Clearly, f(ϵ)∈Q0. In addition, by the definition of Gf, as Q0 = δ(Q0, ϵ), we have that Gf(Q0, f(ϵ)). Hence, as Gf⊆H, we have that H(Q0, f(ϵ)), and we are done. □
Lemmas 3.2 and 3.1 together imply that a function that witnesses the HDness of an HD-NFW 𝒜 also witnesses the nonemptiness of QH0, and so we can conclude with the following.
Corollary 3.3. Every HD-NFW is DBP.
Remark 3.1. A language L⊆Σω is a safety language if it states that something “bad" never happens. Formally, for every infinite word w∈Σω, if w∉L, then w has a prefix x∈Σ* such that x·y∉L for all y∈Σω. Safety languages play an important role in verification and synthesis, as many natural specifications are safe. It is not hard to prove that safety languages can be recognized by looping automata, namely Büchi automata in which all states are in α (or dually, co-Büchi automata in which no state is in α) (Sistla, 1994). It is also not hard to see that the considerations in our proof earlier apply also to looping automata. Thus, all HD nondeterministic looping automata are DBP. In fact, by Morgenstern (2003) and Boker et al. (2017), the earlier also applies to weak automata, which are a stronger special case of Büchi and co-Büchi, in which every strongly connected component of the graph induced by the automaton is either contained in α or disjoint from α. □
We continue to automata on infinite words and show that here, the past does play a role in resolving nondeterminism. Thus, HD Büchi and co-Büchi automata need not be DBP. The result was first proven, by examples, in Boker et al. (2013). In Kuperberg and Majumdar (2018), the authors studied DBPness for general NCWs and proved that deciding whether a given NCW is DBP is NP-hard. In Abu Radi et al. (2021), the authors noted that the NCW used in the proof is actually HD; thus, deciding DPNess is NP-hard already for HD-NCWs, and proved similar results also for Büchi automata. Clearly, in order for a problem to be NP-hard, the answer has to be non-trivial. Thus, there are HD-NCWs and HD-NBWs that are not DBP, and deciding whether a given HD-NCW or HD-NBW is DBP is NP-hard. Here, we describe a variant of the example in Boker et al. (2013) for the Büchi case and then describe the NP-hardness proof for the co-Büchi case. We consider both state-based and transition-based acceptance.
Theorem 3.4. Boker et al. (2013) there are HD-tNBWs and HD-NBWs that are not DBP.
Proof. Consider the tNBW 𝒜 appearing in Figure 1. We prove that 𝒜 is HD and is not DBP.
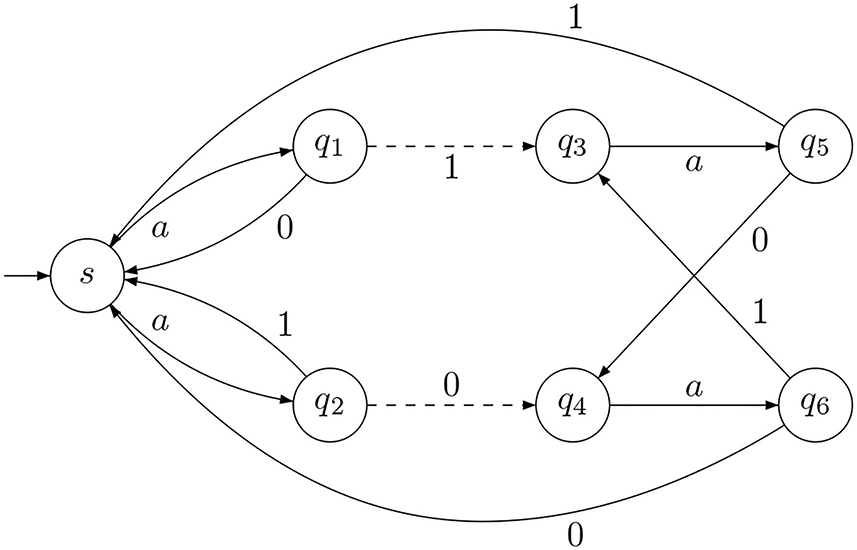
Figure 1. A HD-tNBW that is not DBP. Dashed transitions are in α.
Note that 𝒜 gets stuck (and rejects) when it reads words that are not in (a0+a1)ω. We claim that L(𝒜)=L, for
In order to see that L(𝒜)⊆L, note that if a word in (a0+a1)ω is not in L, and thus it has only finitely many infixes of the form a0a0 or a1a1, then it has a suffix (a0a1)ω. Of note, when a run of 𝒜 traverses an α-transition when reading such a suffix, then after taking the α-transition, it keeps looping at the q3, q5, q4, q6 cycle and never traverses an α-transition again. In order to see that L⊆L(𝒜), note that after reading a prefix in (a0+a1)*, a run of 𝒜 is in state s, q3, or q4. If the run is in state s or q4 and reads a0a0, then it can traverse an α-transition and return to s, and if it is in state q3 and reads a0a0, then it reaches the state s. In addition, reading a1 from s, a run can return to s. Thus, reading a0a0 infinitely often enables a run to traverse α-transitions infinitely often, and similarly for a1a1.
We continue and prove that 𝒜 is HD. We do so by describing a strategy f that witnesses its HDness. Note that there is one nondeterministic transition in 𝒜: reading a in state s, a run can proceed to q1 or q2. We define f so that whenever 𝒜 is in state s and reads a, it directs the run to proceed as follows. If the run has just started or s was reached from q6 or q2, then the run continues to q1; if s was reached from q5 or q1, then the run continues to q2. First, note that the earlier strategy can be described by means of a function with domain {a, 0, 1}*. For example, f(a) = q1, f(a0a) = q2, and f(a1a1a) = q2. In addition, the strategy guarantees that all words in the language are accepted. Indeed, reading a0a0 either leads to a traversal of an α-transition or leads to s, where the next a0a0 or a1a1 leads to a traversal of an α-transition, and similarly for a1a1.
It is left to prove that 𝒜 is not DBP. Recall that there are two ways to make 𝒜 deterministic by pruning: either prune the a-transition from s to q1 or the a-transition from s to q2. We show that both ways result in a tDBW whose language is strictly contained in that of 𝒜. First, if we prune the transition from s to q1, then the obtained tDBW rejects the word (a1)ω, which is in L(𝒜). Indeed, the single run on it is (s,q2)ω, which is rejecting. Dually, if we prune the transition from s to q2, then the single run of the obtained tDBW on the word (a0)ω, which is in L(𝒜), is (s,q1)ω, which is rejecting.
Thus, 𝒜 is an HD-tNBW that is not DBP. We continue and obtain from 𝒜 an HD-NBW 𝒜′ that is not DBP. For this, we replace the letters 0 and 1 with the words 0# and 1#, respectively; thus, consider the language L′ = {w∈(a0#+a1#)ω:whas infinitely many infixes of the forma0#a0#ora1#a1#}. We obtain 𝒜′ from 𝒜 by adding an intermediate state inside each 0-transition (and similarly for 1-transitions). The state is reached with 0 and continues with # to the destination of the original transition. The new state is accepting if the transition that induces it is accepting. By applying the same considerations detailed earlier for 𝒜, it is easy to see that 𝒜′ accepts exactly all words in (a0#+a1#)ω that have infinitely many infixes of the form a0#a0# or a1#a1#, is HD, and is not DBP. □
Theorem 3.5. Kuperberg and Majumdar (2018), Abu Radi et al. (2021) deciding whether a given HD-tNCW or HD-NCW is DBP is NP-complete.
Proof. Since pruning transitions can only decrease the language of an automaton and checking the containment of the language of a tNCW (or NCW) in the language of a tDCW (or a DCW) can be checked in polynomial time, membership in NP is easy.
For the lower bound, we describe a reduction from the Hamiltonian-cycle problem: Given a connected directed graph G = 〈V, E〉, the problem is to decide whether G contains a cycle that visits every vertex in V exactly once. We start with automata with state-based acceptance. Consider a graph G = 〈V, E〉. For simplicity, we assume that V = {1, 2, …, |V|}. Given G, the reduction outputs an NCW 𝒜G over the alphabet V∪{#} that is obtained from G as follows (see example in Figure 2). The automaton 𝒜G accepts only words in (V·#)ω. Each vertex i∈V contributes three states to 𝒜G, denoted vi, si, and ui. From states of form vi, the NCW reads only letters in V, and from states of the form si and ui, it reads only the letter #. When in state vi, the subword i·# leads back to vi via si, and subwords j·#, for j∈V\{i}, nondeterministically lead, via ui, to states vk, for successors k of i in G. For example, in the graph G and its NCW appearing in Figure 2, there are two #-transitions from state u1, leading to v2 and v4 – or the successors 2 and 4 of the vertex 1 in G. Accordingly, reading 1#, a run from v1 returns to v1, and reading 2#, 3#, or 4#, a run from v1 can reach v2 or v4.
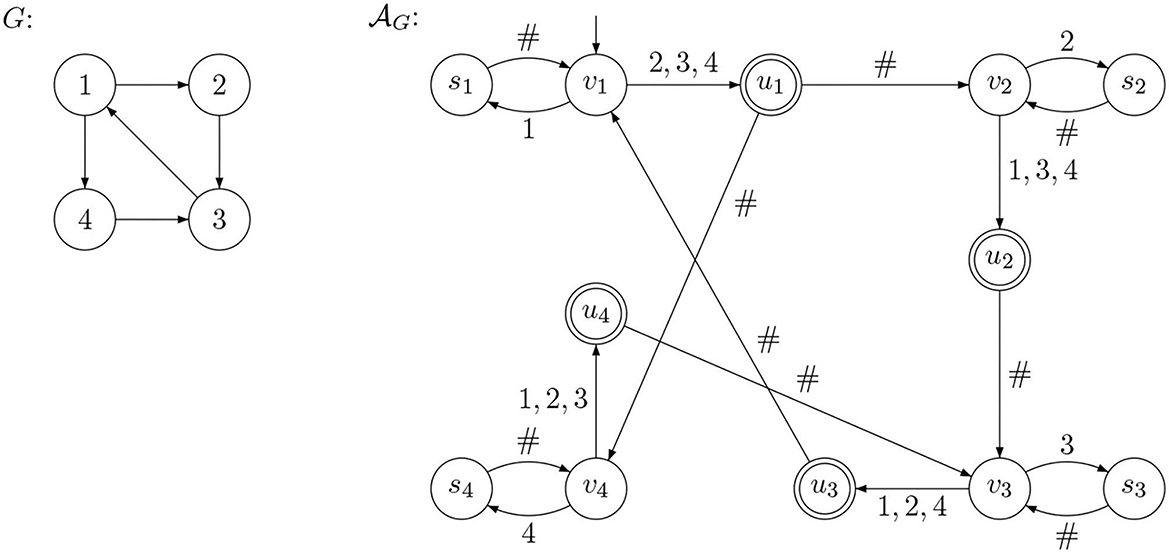
Figure 2. Reduction from the Hamiltonian-cycle problem.
The co-Büchi condition α includes all states of the form ui, and thus requires a run to eventually get stuck at some (vi,si)ω cycle. Accordingly, L(𝒜G)=(V·{#})*·⋃i∈V(i·#)ω. Indeed, no matter which state of the form vk is reached after reading some prefix in (V·{#})*, the fact G is connected guarantees that for every i∈V, the state vi can be reached from vk by reading a prefix of the (i·#)ω suffix after at most |V| visits in α, and then the run can stay forever in the (vi,si)ω cycle. Thus, if w is accepted by 𝒜G, then the accepting run on it eventually loops in some (vi,si)ω cycle, which is possible only if w is in (V·#)ω and has an (i·#)ω suffix.
In order to see that 𝒜G is DBP if there is a Hamiltonian cycle in G, note that the only nondeterminism in 𝒜G is in states of the form uk, where the letter # forces each deterministic pruning of 𝒜G to proceed from the state vk upon reading a subword (V\{i})·#, to the same state vj, for some successor vertex j of k. DBPing 𝒜G from Figure 2, for example, leaves only one #-transition from u1, forcing 2#, 3#, or 4# to all reach v2 from v1, or all reach v4.
Now, if there is a Hamiltonian cycle in G, then 𝒜G can be pruned to a DCW by leaving, from each state uk, the #-transition to the successor of vertex k in the cycle. Indeed, as the Hamiltonian cycle visits all vertices of G, reading a suffix (i·#)ω of a word in L(𝒜G), the DCW can reach the (vi,si)ω cycle and stay there forever. For the other direction, a DCW that is obtained by pruning 𝒜G and recognizes L(𝒜G) must induce a Hamiltonian cycle, as otherwise, some vertices are not reachable in the DCW, making its language a strict subset of L(𝒜G).
Finally, it is not hard to see that 𝒜G is HD for every graph G. Indeed, an HD strategy can decide to which successor of vk to proceed with a subword in (V\{k})·# by following a (not necessarily Hamiltonian) cycle that traverses all the vertices of the graph G. Since when we read (V\{k})·# we move to a state vj for a successor vertex j of k, then by following the cycle when we read an (i·#)ω suffix of a word in L(𝒜G), we eventually reach the state vi, where we stay in the (vi,si)ω cycle, and accept. Thus, the Hamiltonian-cycle problem is reduced to DBPness of an HD-NCW, and we are done.
As for HD-NCWs, the reduction is similar, except that we define 𝒜G to be an HD-tNCW, for example, by defining α as the set of transitions that leave states of the form ui. □
Recall that HD automata are as expressive as deterministic ones. For the case of finite words, this follows immediately from the fact that HD automata are DBP. For the case of infinite words, where HD automata need not be DBP, the result is more complicated. As discussed in Section 1, the expressive power of HD automata was first studied in the setting of derivable tree languages (Kupferman et al., 1996; Niwinski and Walukiewicz, 1998). Then, Kuperberg and Skrzypczak (2015) also studied the succinctness of HD automata with respect to deterministic ones, namely the blowup involved in determinizing a given HD automaton. In this section, we study determinization and succinctness of HD automata. As we shall see, the answers for Büchi and co-Büchi automata are different, and in a surprising way: While nondeterminism is in general more significant for Büchi than for co-Büchi automata, HD nondeterminism is more significant for co-Büchi than for Büchi. Specifically, while HD-NBWs can be determinized with a quadratic blowup, determinization of HD-NCWs may involve an exponential blowup (Kuperberg and Skrzypczak, 2015).
We first show that both Büchi and co-Büchi HD automata can be determinized with a construction that is similar to the subset construction used for determinization of NFWs (Rabin and Scott, 1959). As noted earlier, for the Büchi case, this is a significant improvement over determinization of general NBWs (Safra, 1988). For the co-Büchi case, determinization of general NCWs involves a “break-point construction,” which augments the subset construction by a set that keeps track of visits to states in α, and involves a 3n blowup (Miyano and Hayashi, 1984), which is tight (Boker et al., 2010). Thus, also in the co-Büchi case, deterninization of HD automata is simpler than determinization of general automata.
Theorem 4.1. Kupferman et al. (2006), Kuperberg and Skrzypczak (2015) HD-NBWs (HD-NCWs) are as expressive as DBWs (respectively, DCWs). Given an HD-NBW (HD-NCW) with n states, we can construct an equivalent DBW (respectively, DCW) with 2n states. Similar results hold for automata with transition-based acceptance.
Proof. We start with Büchi automata. Consider an HD-NBW 𝒜=〈Σ,Q,q0,δ,α〉. We assume that 𝒜 is semantically deterministic; thus, its nondeterministic choices lead to states with the same language. As detailed in Section 2, every HD automaton can be pruned in polynomial time to a semantically deterministic automaton.
We define the DBW 𝒜′=〈Σ,2Q,{q0},δ′,α′〉, where α′ = {S∈2Q:S⊆α}, and the transition function δ′ is defined for every state S∈2Q and letter σ∈Σ as follows. If δ(S, σ)∩α = ∅, then δ′(S, σ) = δ(S, σ). Otherwise, namely if δ(S, σ)∩α≠∅, then δ′(S, σ) = δ(S, σ)∩α. Thus, we proceed as in the standard subset construction, except that whenever a constructed set contains a state in α, we leave in the set only states in α.
The key observation about the correctness of the construction is that when 𝒜 is semantically deterministic, then for all reachable states S of 𝒜′, and all states q, q′∈S, we have that 𝒜q and 𝒜q′ are equivalent. Indeed, if 𝒜 is semantically deterministic, then for every two states q, q′∈Q, letter σ∈Σ, and states s∈δ(q, σ) and s′∈δ(q′, σ); if q and q′ are equivalent, then so are s and s′. In addition, by the definition of δ′, every reachable state S of 𝒜′ contains only states in α or only states not in α. As we formally prove later, these properties guarantee that indeed L(𝒜′)=L(𝒜).
We first prove that L(𝒜′)⊆L(𝒜). Let r𝒜′=S0,S1,S2,… be an accepting run of 𝒜′ on a word w = σ1·σ2⋯ . We construct an accepting run of 𝒜 on w. Since r𝒜′ is accepting, there are infinitely many positions j1, j2, … with Sji∈α′. Let j0 = 0, and consider the DAG G = 〈V, E〉, where
• V⊆Q×ℕ is the union ⋃i≥0(Sji×{i}).
• E⊆⋃i≥0(Sji×{i}) × (Sji+1×{i+1}) is such that for all i≥0, it holds that E(〈s′, i〉, 〈s, i+1〉) if there is a finite run from s′ to s over w[ji+1, ji+1]. Then, we label this edge by the run from s′ to s.
By the definition of 𝒜′, for every j≥0 and state sj+1∈Sj+1, there is a state sj∈Sj such that sj+1∈δ(sj, σj). Thus, it follows by induction that for every i≥0 and state si+1∈Sji+1, there is a state si∈Sji such that there is a finite run from si to si+1 on w[ji+1, ji+1]. Thus, the DAG G has infinitely many reachable vertices from the vertex 〈q0, 0〉. In addition, as the nondeterminism degree of 𝒜 is finite, so is the branching degree of G. Thus, by König's Lemma, G includes an infinite path, and the labels along the edges of this path define a run of 𝒜 on w. Since for all i≥1, the state Sji is in α′, and so all the states in Sji are in α, this run is accepting, and we are done.
For the other direction, assume that w=σ1·σ2⋯∈L(𝒜), and let r = r0, r1, … be an accepting run of 𝒜 on w. Let r′=S0,S1,S2… be the run of 𝒜′ on w, and assume, by way of contradiction, that r′ is not accepting; thus, there is a position j≥0 such that Sl∉α′, for all l≥j. Consider a state S of 𝒜′ and a letter σ∈Σ. By the definition of 𝒜′, if S′ = δ′(S, σ) and S′∉α′, then all the σ-successors of a state s∈S are in not in α. Applying the earlier observation iteratively, we get that all the runs of a state sj∈Sj on the suffix w[j+1, ∞] never visit an α state. Thus, for all sj∈Sj, we have that 𝒜sj does not accept w[j+1]. We claim that rj is equivalent (in 𝒜) to all the states in Sj, which is a contradiction, as 𝒜rj does accept s[j+1, ∞].
Consider states q∈Q, a letter σ∈Σ, and a state q′∈δ(q, σ). Since 𝒜 is semantically deterministic, the definition of 𝒜′ implies that if q is equivalent (in 𝒜) to all the states in some set S∈2Q, then q′ is equivalent (in 𝒜) to all the states in δ′(S, σ). Now, since r0 = q0 and S0 = {q0}, an iterative application of the earlier observation implies that indeed rj is equivalent to all the states in Sj, and we are done.
We continue to the co-Büchi automata, where the construction is similar, except that in 𝒜′, we try to proceed to states that are not in α. Formally, 𝒜′=〈Σ,2Q,{q0},δ′,α′〉, where α′ = {S∈2Q:S⊆α} is as in the Büchi case, and the transition function δ′ is defined for every state S∈2Q and letter σ∈Σ as follows. If δ(S, σ)⊆α, then δ′(S, σ) = δ(S, σ). Otherwise, namely if δ(S, σ)∩(Q\α)≠∅, then δ′(S, σ) = δ(S, σ)\α. Thus, whenever a constructed set contains a state not in α, we leave in the set only states not in α. The proof is based on the semantic determinism of 𝒜 and follows the same considerations as in the Büchi case.
Finally, for automata with transition-based acceptance, the constructions are also similar, except that we restrict the sets according to the membership of transitions in α. For example, in the case of HD-tNBW, consider a state S∈2Q and a letter σ∈Σ. If all the σ-transitions in 𝒜 from states in S are not in α, then 𝒜′ proceeds from S to the set of all the σ-successors of S in 𝒜, and the transition is not in α′. If some σ-transitions from S are in α, then 𝒜′ proceeds only with these transitions, and the transition is in α. Formally, for S∈2Q and σ∈σ, let
Now, if S′ = ∅, then δ′(S, σ) = δ(S, σ) and 〈S, σ, δ(S, σ)〉∉α′, and if S′≠∅, then δ′(S, σ) = S′ and 〈S, σ, S′〉∈α′. ✉
For a language L⊆Σω, the complement of L, denoted by °(L), is the set of infinite words not in L, thus °(L) = Σω \ L. In this section, we show that the determinization of HD automata cannot induce an exponential blowup for both a language and its complement. This is different from the situation for general nondeterministic automata, where a blowup may occur for both languages. For example, consider the family of languages of finite words Lk=(a+b)*·a·(a+b)k-1. While for all k≥1, both Lk and {a, b}* \ L can be recognized by nondeterministic automata with k+1 states, a deterministic automaton for Lk must have at least 2k states.
The earlier property of HD automata was proved in Boker et al. (2013) for HD automata with the Rabin acceptance condition.3 In this study, we give a variant of the proof, focusing on Büchi and co-Büchi automata.
Theorem 4.2. Consider a language L⊆Σω. If there is an HD-NBW for L with n states and an HD-NCW for °(L) with m states, then there is a DBW for L with nm states.
Proof. Let 𝒜1=〈Σ,Q1,q01,δ1,α1〉 be an HD-NBW for L, and 𝒜2=〈Σ,Q2,q02,δ2,α2〉 be an HD-NCW for °(L). Consider the nondeterministic automaton 𝒜 obtained by taking the product of 𝒜1 with 𝒜2. Thus, 𝒜=〈Σ,Q1×Q2,〈q01,q02〉,δ,α〉, where for every state 〈q1, q2〉∈Q1×Q2 and letter σ∈Σ, we have that δ(〈q1, q2〉, σ) = δ1(q1, σ) × δ2(q2, σ). It is easy to see that if we define 𝒜 as an NBW with α = α1×Q2, we get that L(𝒜)=L(𝒜1)=L, and if we define 𝒜 as an NCW with α = Q1×α2, we get that L(𝒜)=L(𝒜2)=•(L). Notably, as every word in Σω is either in L or in °(L), if we define 𝒜 with a Rabin condition α = {〈α1×Q2, ∅〉, 〈Q1×Q2, Q1×α2〉} with two pairs (for readers not familiar with the Rabin acceptance condition, a run satisfies α if its projection on Q1 satisfies the Büchi condition α1 or its projection on Q2 satisfies the co-Büchi condition α2), we get that L(𝒜)=Σω. We argue that in all three cases, 𝒜 is DBP. Since the number of states in 𝒜 is |Q1×Q2|, the theorem follows.
Consider the following game between Player ∃ and Player ∀. The game is played on 𝒜 and starts from position 〈q01,q02〉. When the game is in position 〈q1, q2〉∈Q1×Q2, Player ∀ chooses a letter σ∈Σ, and Player ∃ chooses a successor position 〈q′1,q′2〉∈δ(〈q1,q2〉,σ). The outcome of a play is an infinite run r=〈q01,q02〉,〈q11,q12〉,〈q21,q22〉,〈q31,q32〉,… of 𝒜. Note that r combines a run r1=q01,q11,q21,q31,… of 𝒜1 with a run r2=q02,q12,q22,q32,… of 𝒜2, both on the word w obtained by concatenating the letters chosen by Player ∀.
The winning condition for a Player ∃ is that either r1 satisfies α1 or r2 satisfies α2. This winning condition can be specified by a Rabin winning condition with two pairs: {〈α1×Q2, ∅〉, 〈Q1×Q2, Q1×α2〉}. It is easy to see that following the HD strategies of both automata is a winning strategy for the Player ∃. Indeed, this strategy guarantees that if the word w is in L, the run r1 is accepting in 𝒜1 and thus satisfies the Büchi condition α1, and if w∈°(L), then the run r2 is accepting in 𝒜2 and thus satisfies the co-Büchi condition α2. Since every word is either in L or in °(L), the winning condition for the Player ∃ is always satisfied.
It is known that Rabin games admit memoryless strategies (Klarlund, 1992; Jutla, 1997). Hence, the Player ∃ actually has a memoryless winning strategy in the game. Such a strategy maps each position 〈q1, q2〉∈Q1×Q2 and letter σ∈Σ to a position 〈q′1,q′2〉, and induces the required pruning of 𝒜 into a deterministic automaton 𝒜′. Specifically, 𝒜′ with the Rabin condition {〈α1×Q2, ∅〉, 〈Q1×Q2, Q1×α2〉} accepts all the words in Σω, then 𝒜′ with the Büchi condition α1×Q2 is a DBW for L, and 𝒜′ with a co-Büchi condition Q1×α2 is a DCW for °(L). □
In Section 4.3, we use Theorem 0.0.7 in order to obtain both upper and lower bounds on the succinctness of HD automata with respect to deterministic ones.
By Theorem 0.0.7, an upper bound on the complementation of HD automata implies an upper bound also on their determinization. Specifically, if f:ℕ → ℕ is a function such that complementing an HD automaton 𝒜 with n states results in an HD automaton with at most f(n) states, then the determinization of 𝒜 results in an automaton with at most n·f(n) states. In Kuperberg and Skrzypczak (2015), the authors describe a linear complementation construction for HD-NBWs. Hence, HD-NBWs are at most quadratically more succinct than DBWs, and the same holds for HD-tNBWs. For the co-Büchi acceptance condition, Kuperberg and Skrzypczak proved that HDness could lead to a significant succinctness. Their proof makes use of Theorem 0.0.7 in the following way. Consider a language L⊆Σω, and assume that 𝒜 is an HD automaton for L. By Theorem 0.0.7, an HD automaton for °(L) can serve as a “memory structure” that generates a strategy for 𝒜: Taking its product with 𝒜, we obtain a deterministic automaton that inherits its acceptance condition from 𝒜. Since every deterministic automaton is an HD automaton, and deterministic automata can be complemented by dualization, it follows that every deterministic automaton for L can also serve as a memory structure for an HD automaton for L. As we shall see now, this property is useful in the proof of the exponential succinctness of HD-NCWs with respect to DCWs. We state the theorem in the transition-based setting. Similar considerations hold in the state-based setting.
Theorem 4.3. Kuperberg and Skrzypczak (2015) there is an infinite family of languages L1, L2, L3, … such that for every n≥1, the following holds.
1. There is an HD-tNCW with 2n states that recognizes Ln.
2. Every tDCW that recognizes Ln needs at least 2n2n states.
Proof. For n≥1, let [n] = {0, 1, …, 2n−1}. We define the language Ln over the alphabet Σ = {I, Z, X, H}. Each letter in Σ is a (possibly partial) function σ:[n] → [n], as described in Figure 3.
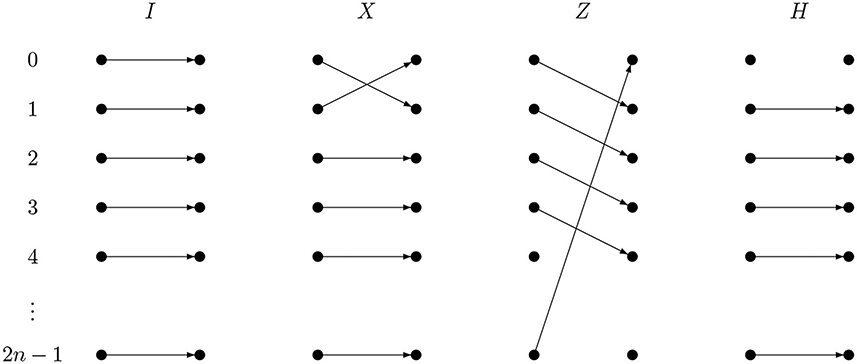
Figure 3. Permutations induced by the letters I, X, Z, and H.
The functions I, X, and Z are one-one and onto: For every x∈[n], we have that I(x) = x, Z(x) = (x+1)mod2n−1, and X agrees with I, except for x∈{0, 1}, where X(0) = 1 and X(1) = 0. The function H is partial; it agrees with I, except for x = 0, where H(0) is undefined. Thus, the letters induce permutations on [n], with H inducing a permutation only on [n]\{0}.
We view a finite word w as the partial function w:[n] → [n] obtained by composing its letters. Thus, if w = σ1·σ2⋯σl, then for all i∈[n], we have that w(i) = σl(⋯σ2(σ1(i))). It is convenient to associate with each word w∈Σ* a grid of dimensions (|w|+1) × 2n, and lines that start in “floors" in [n] and traverse the floors along the grid according to the permutations induced by the letters in w. As H(0) is undefined, a line that reaches floor 0 before H is read has a “hole" in the corresponding position in the grid. Figure 4 describes the grid associated with the word IXHZZXHZ when n = 2 and n = 3.
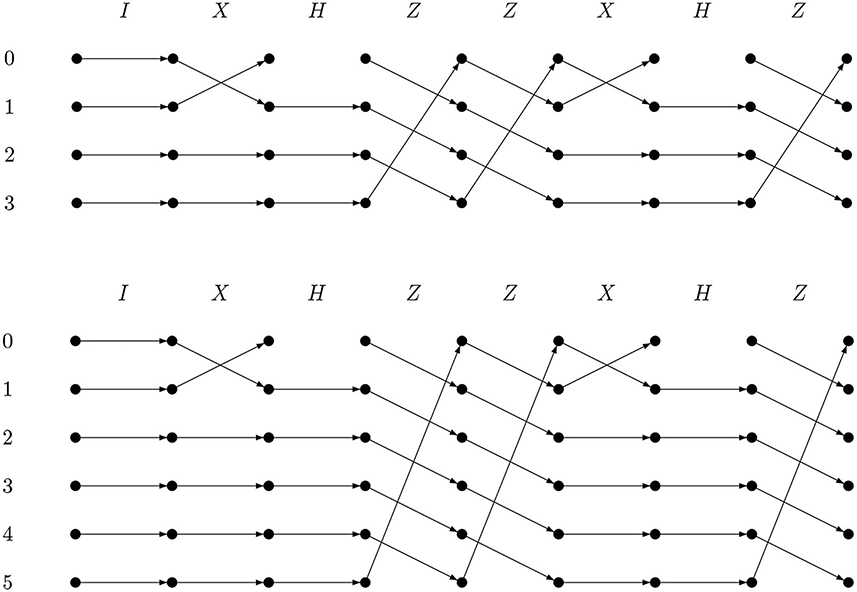
Figure 4. Grid induced by the word IXHZZXHZ when n = 2 (top) and n = 3 (bottom).
An infinite word u∈Σω corresponds to an infinite sequence of compositions of its letters, and thus the horizontal dimension of the grid associated with it is infinite. We define Ln as the set of words in Σω whose grid contains an infinite line; that is, a line that has only finitely many holes. For example, back to Figure 4, it is not hard to see that the infinite word u = wω, for w = IXHZZXHZ is in L2. Indeed, when n = 2, we have that w(0) = 0 and w(2) = 2, and so the lines starting at floors 0 and 2 are never cut. In contrast, u∉L3. Indeed, when n = 3, we have that w(0) = 4, w(2) = 5, w(3) = 0, w(4) = 2, whereas w(1) and w(5) are undefined. Accordingly, w5(i) is undefined for all i∈[3], implying that lines from all floors are cut whenever w5 is read. Therefore, the grid of u contains no infinite line, and so u∉L3.
We first prove that there is an HD-tNCW with 2n states that recognizes Ln. It is easy to see that Ln can be recognized by a tNCW with 2n states. Indeed, a tNCW can simply guess a line to follow and initiate its guess whenever the line it follows is cut. Specifically (see 𝒜2 in Figure 5), the tNCW 𝒜n has state space {q0, …, q2n−1} and for all i∈[n], it visits qi when the line it follows is in floor i. The initial state of 𝒜n is arbitrarily set to q0, and the transition function updates the floor according to the letter it reads. For example, when 𝒜n is in state qi and reads I, it stays in qi, when it reads X, if stays in qi for i∈{2, …, 2n−1}, moves to q1 from q0, and moves to q0 from q1. Nondeterminism is required when 𝒜n reads the letter H in state q0; thus, when it follows a line that is in floor 0 and the line is cut. Then, 𝒜n guesses a new floor to follow. Since all floors are candidates for hosting an infinite line, 𝒜n can nondeterministically move from q0 with H to all states. Since the input word is in the language, if it contains an infinite line; thus, if it is possible to eventually follow a line that is never cut, we want an accepting run to take only finitely many H-transitions from the state q0; thus, α is the set of these transitions.
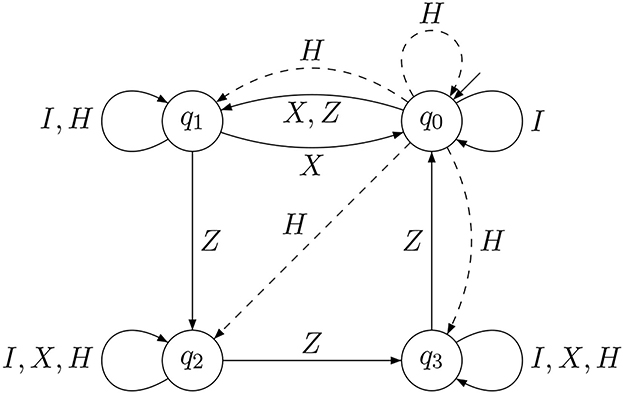
Figure 5. HD-tNCW 𝒜2 that recognizes L2.
It is less easy to see that the tNCW 𝒜n is in fact HD. In order to see this, consider the following HD strategy g:Σ*→Q. First, g(ϵ) = q0; thus, all runs start in state q0, which is the only initial state of 𝒜n. Whenever a run is in state q0 after reading a prefix u, and it reads H, it proceeds to the state qi such that the line that is now in the floor i is the longest among all lines in the graph. Formally, for all words u∈Σ* and floors i∈[n], let seniority(u, i) be the length of the longest suffix u′ of u such that there is j∈[n] with u′(j) = i. Then, if u∈Σ* is such that g(u) = q0, then g(u·H) = qi, for the minimal i∈[n] that maximizes seniority(u, i). Note that the choice of the minimal i is arbitrary, and it is required in order to decide between lines with the same seniority. Note also that it is possible to implement the HD strategy g by maintaining the order of seniority among the different floors during the run; thus, it indeed depends only on the history of the run. Finally, as an infinite line would eventually obtain the maximal seniority, it is guaranteed that following the strategy g leads to accepting all words in the language: In all of them, the run that follows g eventually follows an infinite line.
It is left to prove that a tDCW for Ln needs at least 2n−1 states. The full proof, in Kuperberg and Skrzypczak (2015), is based on the following arguments: The first argument refers to the ability to generate with finite words over {I, Z, X} every permutation on [n]. The proof in Kuperberg and Skrzypczak (2015) focuses on pair-based permutations, namely permutations that map each floor i∈[n] to floor 2⌊i2⌋ or 2⌊i2⌋+1. That is, for every j∈{0, …, n−1}, the permutation map {2j, 2j+1} onto itself. Note that there are 2n pair-based permutations and that each pair-based permutation could be generated by a word in ((I+X)·ZZ))n. Indeed, the word that generates a pair-based permutation π is σ0·ZZ·σn−2·ZZ·σn−1·ZZ·σ2·ZZ·σ1·ZZ, where for all j∈{0, …, n−1}, we have that σj = I if π does not switch 2j and 2j+1 and σj = X if π switches 2j and 2j+1. For example (see Figure 6), when n = 3, the word IZZXZZXZZ induces the permutation 〈013254〉; thus, it switches {2, 3} and {4, 5}. It is easy to see that in a similar manner, we can generate with finite words over {I, Z, X} every permutation on [n], and not only pair-based ones.
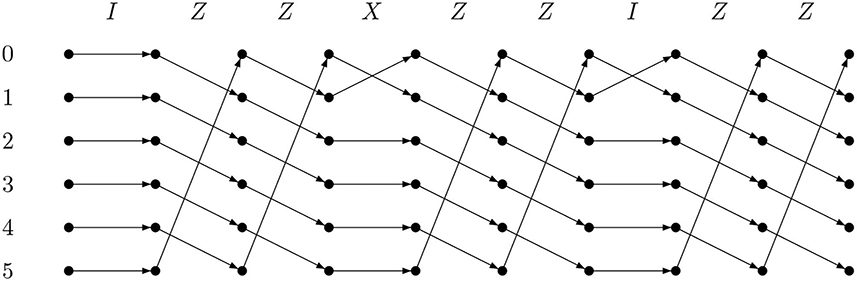
Figure 6. Word IZZXZZXZZ generates the pair-based permutation 〈013254〉.
The second argument is that when we discuss potential tDCWs for Ln, we can restrict attention to tDCWs that are obtained by taking the product of 𝒜n with a deterministic memory structure. The argument proceeds as follows. Given a tDCW with f(n) states for Ln, we can dualize it and obtain a tDBW for °(Ln), which is also an HD-tNBW for °(Ln). Then, as specified in the proof of Theorem 0.0.7, we can take the product of this HD-tNBW with the HD-tNCW 𝒜n described earlier for Ln and obtain a tDCW with 2n·f(n) states for L whose acceptance condition is induced by 𝒜n. Thus, its α-transitions are H-transitions that leave states of the form 〈q0, s〉 for a state s of the claimed tDCW. Note that in this process, we start with a tDCW with f(n) states for Ln and obtain an equivalent tDCW with 2n·f(n) states, which may seem a bad idea in the context of proving a lower bound. The information, however, that we gain about the structure of the obtained tDCW makes this “2n penalty” worthwhile.
The third, and most complicated argument is that a tDCW that attempts to recognize Ln is obtained by taking the product of 𝒜n with a deterministic memory structure, and has < 2n states, must err. Essentially, the argument proceeds as follows. Consider a tDCW 𝒟n as earlier. Since 𝒟n is obtained by taking the product of 𝒜n with some memory structure, it accepts only words in the language, and so the error we highlight is that it rejects a word in Ln. The word along with the run rejecting it are constructed as follows. The run starts from some state of the form 〈q0, s0〉. Since 𝒟n has < 2n states, there are two different pair-based permutations π1 and π′1 that lead from 〈q0, s0〉 to the same state 〈qi1, s1〉. Since π1≠π′1, there is j∈{0, …, n−1} such that π1(2j)≠π′1(2j). Thus, {π1(2j),π′1(2j)}={2j,2j+1}. This implies that the size of the set F={π1(1),π1(3),…,π1(2n-1),π′1(2j)} is n+1. Therefore, there is a permutation τ1 that behaves as follows: First, it maps i1 (that is, the floor that 𝒟n now follows, as its 𝒜n component is in state qi1) to 0. In addition, if i1∈F, then the other n elements in F are mapped to {1, 3, …, 2n−1}, and if i1∉F, then n elements in F are mapped to {1, 3, …, 2n−1}, and one element is mapped arbitrarily. Note that since 𝒟n is based on 𝒜n, its run on τ1 from the state 〈qi1, s1〉, reaches a state of the form 〈q0,s′1〉. Indeed, the operation of 𝒜n on τ1 is deterministic, and it follows the states that correspond to the floors visited along the execution to the permutation τ1, which maps i1 to 0. Thus, when 𝒟n reads either π1·τ1·H or π′1·τ1·H, the transition has taken when the last letter H is read, is an α-transition. In contrast, the grid induced by at least one of these words includes a line that is not cut and reaches one of the floors in {1, 3, …, 2n−1}. Let 〈qi′1,s″1〉 be the H-successor of 〈q0,s′1〉 in 𝒟n. We can now continue the generation of the run by considering two different pair-based permutations π2 and π′2 that lead from 〈qi′1,s″1〉 to the same state 〈qi2, s2〉 and a permutation τ2 whose composition with π2 and π′2 maps i2 to 0 and guarantees that the line to at least one floor in {1, 3, …, 2n−1} is not cut. Continuing in this manner, it can be shown that while the runs on all the words in (π1+π′1)·τ1·H·(π2+π′2)·τ2·H⋯ are rejecting, at least one of these words is in Ln.
Since their introduction, history-deterministic automata have attracted a lot of interest in the research community. Indeed, beyond their practical usefulness, history determinism is theoretically interesting and intriguing, relevant to computation models beyond nondeterministic automata on infinite words, and many natural questions around it are still open. This survey focuses on some key results about HD nondeterministic Büchi and co-Büchi automata on infinite words. Due to the lack of space, several clear results, such as the linear complementation and quadratic determinization of HD-NBWs (Kuperberg and Skrzypczak, 2015), algorithms for deciding HDness (Kuperberg and Skrzypczak, 2015; Bagnol and Kuperberg, 2018), relations to other types of bounded nondeterminism (Boker et al., 2017; Abu Radi et al., 2021), and results on HD automata with richer acceptance conditions (Boker et al., 2017, 2020; Casares et al., 2022) are not included.
History determinism has also been studied for alternating, pushdown, and quantitative automata. We briefly describe these models here. For an excellent recent survey, see Boker and Lehtinen (2023). An alternating automaton has both nondeterministic and universal transitions. While a nondeterministic transition stands for an existential choice; thus, a run may choose a successor state to proceed to. In a universal transition the run should proceed to all successors (Chandra et al., 1981). Thus, universality actually involves no choices that have to be resolved, and one could have defined HD alternating automata as ones in which the nondeterministic choices can be resolved in a way that only depends on the past. One of the main features, however, of alternating automata is the duality between the nondeterministic and universal choices. In particular, an alternating automaton 𝒜 can be complemented (that is, turned into an automaton ~𝒜 for the complementing language) by dualizing its transition function (that is, making all nondeterministic branches universal and all universal branches nondeterministic) and acceptance condition (that is, switching between Büchi and co-Büchi). With this duality in mind, Colcombet defined HD alternating automata with cost functions as automata that have two strategies—one for resolving nondeterministic choices in 𝒜 and one for resolving nondeterministic choices in ~𝒜 (Colcombet, 2013). HD alternating automata for ω-regular languages are further studied in Boker and Lehtinen (2019).
History-deterministic ω-pushdown automata were studied in Guha et al. (2021) and Lehtinen and Zimmermann (2022). Their definition is similar to the definition of HD ω-regular automata, except that now, the nondeterminism that the strategy resolves corresponds to the different choices in the transition function of pushdown automata; thus, the strategy maps the history to both the next state of the automaton and the operations on the stack.
Quantitative automata define weighted languages, namely mappings from words to values. In these automata, nondeterminism essentially amounts to letting the automaton choose a run that leads to the best value. For example, if the value of a run is the limit average of values of transitions taken along the run, and the setting corresponds to a maximization question, then the value of a word is the supremum value of all the runs on it. Recall that a strategy of an HD Boolean automaton has to generate a run that accepts all words in the language of the automaton. In the quantitative setting, we want the strategy to generate a run that attains the supremum value (or, in a minimization setting, the infimum value) (Boker and Lehtinen, 2021). The quantitative setting calls for variants in which we seek strategies that approximate the optimal value or attain values above or below some threshold. In fact, the very first work of Colcombet on HD automata studied strategies that approximate regular cost functions (Colcombet, 2009), and the analysis of the competitive ratio of online algorithms in Aminof et al. (2010, 2011) studied approximating HD quantitative automata.
An orthogonal extension of HD automata is motivated by their use in the synthesis problem. Recall that the problem can be reduced to solving a game on top of an HD automaton for the specification. HD automata are defined for general alphabets, whereas in the synthesis problem, the specification is over an alphabet 2I∪O, for sets I and O of input and output signals, respectively. In Faran and Kupferman (2020), the authors introduced (I/O)-aware HD automata, which distinguish between nondeterminism due to I and O: Both should be resolved in a way that depends only on the past; but while nondeterminism in I is hostile, and all I-futures should be accepted, nondeterminism in O is cooperative, and a single O-future may be accepted. It is shown in Faran and Kupferman (2020) that (I/O)-aware HD automata can be used for synthesis and that they are unboundedly more succinct than deterministic and even HD automata.
Related variants of HD automata have to do with their applications. As discussed in Section 1, HD automata are good for trees, in the sense that an HD word automaton for L can be expanded to a tree automaton for L△, and are good for games, in the sense that synthesis can be reduced to playing a game on top of an HD automaton for the specification. As it turns out, these “goodness" properties need not characterize history determinism in all settings. For example, in the quantitative setting, an automaton may be good for games without being HD (Boker and Lehtinen, 2021). Moreover, even in the Boolean setting, HD may imply, yet not be characterized by, other useful properties. For example, every HD automaton is good for MDPs; thus, its product with Markov decision processes maintains the probability of acceptance and can therefore replace deterministic automata when reasoning about stochastic behaviors (Hahn et al., 2020; Schewe et al., 2022).
Some basic problems around history determinism are still open. Most notable is the succinctness of HD-NBWs with respect to DBWs. Recall that, by Kuperberg and Skrzypczak (2015), HD-NBWs can be determinized with a quadratic blowup. Yet, while we know that not all HD-NBWs are DBP, there is no matching quadratic lower bound, and, in fact, we still do not have even an example of a language L such that an HD-NBW for L is strictly smaller than a DBW for L. In particular, while the HD-tNBW 𝒜 appearing in Figure 1 is not DBP, the tDBW obtained by merging the states q1 and q2 of 𝒜 recognizes L(𝒜) and is smaller than 𝒜.
Additional open problems refer to decision problems around history determinism. One such question is the complexity of deciding whether a given language is HD-helpful, namely whether an HD automaton for it is smaller than a deterministic automaton for it. Note that the definition is parameterized by the acceptance condition. For example, as discussed earlier, possibly there are no languages that are HD-Büchi-helpful (i.e., languages L such that an HD-NBW for L is strictly smaller than a DBW for L), and the same for Büchi automata with transition-based acceptance. For co-Büchi automata, we do know that HD-co-Büchi-helpful languages exist. We also know that there are languages that are HD-co-Büchi-helpful only in automata with transition-based acceptance, but no clean characterization of the tight complexity of the corresponding decision problems is known.
The problem of HD helpfulness is related to the fundamental problem of minimization: the generation of an equivalent automaton with a minimal number of states. For automata on finite words, the picture is well understood: For nondeterministic automata, minimization is PSPACE-complete (Jiang and Ravikumar, 1993), whereas for deterministic automata, a minimization algorithm, based on the Myhill-Nerode right congruence (Myhill, 1957; Nerode, 1958), generates in polynomial time a canonical minimal deterministic automaton (Hopcroft, 1971). Essentially, the canonical automaton, a.k.a., the quotient automaton, is obtained by merging equivalent states. For automata on infinite words, merging of equivalent states fails, and the minimization of DBWs (and hence, also DCWs, as the two dualize each other) is NP complete (Schewe, 2010). In Abu Radi and Kupferman (2019), Abu-Radi and Kupferman described a polynominal minimization algorithm for HD-tNCW. Considering HD-tNCWs rather than DCWs involves two modifications: considering HD rather than deterministic automata and considering transition-based rather than state-based acceptance. A natural question that arises is whether both modifications are crucial for efficiency. In Schewe (2020), Schewe proved that his NP-hardness result of DCW minimization could be generalized to HD-NCWs. This suggests that the consideration of transition-based acceptance is crucial and makes the study of tDBWs and tDCWs minimization, which is still open, very interesting. Moreover, for the richer acceptance condition of Rabin, Casares proved that minimization is NP-hard for HD automata with transition-based acceptance (Casares, 2022), and for automata with state-based acceptance, Abu Radi and Kupferman (2022) shows that minimization is NP-hard already for automata that recognize fragments of ω-regular languages, in particular for automata that recognize liveness languages. The minimization algorithm of Abu Radi and Kupferman (2019) also implies canonicity for HD-tNCWs: All minimal automata have isomorphic safe components (namely, components obtained by restricting the transitions to these not in α), and once we saturate the automata with α-transitions, we get full isomorphism. This is in contrast to DCW, where no canonicity exists (Abu Radi and Kupferman, 2020).
The author confirms being the sole contributor of this work and has approved it for publication.
This study was supported by the Israel Science Foundation, Grant 2357/19. European Research Council, Advanced Grant ADVANSYNT.
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fcomp.2022.1114625/full#supplementary-material
1. ^Note that such a tree exists only when L is fusion closed; in the general case, the relation between a tree automaton for L△ and an HD automaton for L is formalized by a tree that includes all the words in Σω (Boker et al., 2013).
2. ^As explained in Henzinger and Piterman (2006), the fact that the HD automata constructed there are DBP does not contradict their usefulness in practice, as their transition relation is simpler than the one of the embodied deterministic automaton, and it can be defined symbolically.
3. ^We have not defined the Rabin acceptance condition in Section 2. The condition consists of a set of pairs of sets of states (Rabin, 1969). Thus, when the automaton is defined with respect to a set of states Q, it is of the form {〈G1, B1〉, 〈G2, B2〉, …, 〈Gk, Bk〉}, with Gi, Bi⊆Q, and a run r is accepting if for some 1 ≤ i ≤ k, we have that inf(r)∩Gi≠∅ and inf(r)∩Bi = ∅.
Abu Radi, B., and Kupferman, O. (2019). “Minimizing GFG transition-based automata,” in Proceedings of 46th International Colloquium on Automata, Languages, and Programming, volume 132 of LIPIcs, (Wadern: Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik), 100:1–100:16.
Abu Radi, B., and Kupferman, O. (2020). “Canonicity in GFG and transition-based automata,” in Proceedings of 11th International Symposium on Games, Automata, Logics and Formal Verification. Electronic Proceedings in Theoretical Computer Science.
Abu Radi, B., and Kupferman, O. (2022). “Minimization of automata for liveness languages,” in 20th International Symposium on Automated Technology for Verification and Analysis, volume 13505 of Lecture Notes in Computer Science (Springer), 191–207.
Abu Radi, B., Kupferman, O., and Leshkowitz, O. (2021). “A hierarchy of nondeterminism,” in 46th International Symposium on Mathematical Foundations of Computer Science, volume 202 of LIPIcs, 85:1–85:21.
Aminof, B., Kupferman, O., and Lampert, R. (2010). Reasoning about online algorithms with weighted automata. ACM Trans. Algorith. 6, 1721844. doi: 10.1145/1721837.1721844
Aminof, B., Kupferman, O., and Lampert, R. (2011). “Formal analysis of online algorithms,” in 9th International Symposium on Automated Technology for Verification and Analysis, volume 6996 of Lecture Notes in Computer Science (Springer), 213–227.
Bagnol, M., and Kuperberg, D. (2018). “Büchi good-for-games automata are efficiently recognizable,” in Proceedings of 38th Conferences on Foundations of Software Technology and Theoretical Computer Science, volume 122 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik), 16:1–16:14.
Boker, U., Kuperberg, D., Kupferman, O., and Skrzypczak, M. (2013). “Nondeterminism in the presence of a diverse or unknown future,” in Proceedings of 40th International Colloquium on Automata, Languages, and Programming, volume 7966 of Lecture Notes in Computer Science, 89–100.
Boker, U., Kuperberg, D., Lehtinen, K., and Skrzypczak, M. (2020). “On the succinctness of alternating parity good-for-games automata,” in Proceedings of 40th Confeneces on Foundations of Software Technology and Theoretical Computer Science, volume 182 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 41:1–41:13.
Boker, U., Kupferman, O., and Rosenberg, A. (2010). “Alternation removal in Büchi automata,” in Proceedings of 37th International Colloquium on Automata, Languages, and Programming, Vol. 6199, 76–87.
Boker, U., Kupferman, O., and Skrzypczak, M. (2017). “How deterministic are Good-For-Games automata?” in Proceedings of 37th Confenrence on Foundations of Software Technology and Theoretical Computer Science, volume 93 of Leibniz International Proceedings in Informatics (LIPIcs), 18:1–18:14.
Boker, U., and Lehtinen, K. (2019). “Good for games automata: from nondeterminism to alternation,” in Proceedings of 30th International Conference on Concurrency Theory, volume 140 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 19:1–19:16.
Boker, U., and Lehtinen, K. (2021). “History determinism vs. good for gameness in quantitative automata,” in Proceedings of 41st Conference on Foundations of Software Technology and Theoretical Computer Science, volume 213 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik). 38:1–38:20.
Boker, U., and Lehtinen, K. (2023). When a little nondeterminism goes a long way: an introduction to history-determinism. ACM SIGLOG News 10, 177–196.
Büchi, J. (1962). “On a decision method in restricted second order arithmetic,” in Proceedings of International Congress on Logic, Method, and Philosophy of Science. 1960 (Redwood City, CA: Stanford University Press), 1–12.
Casares, A. (2022). “On the minimisation of transition-based rabin automata and the chromatic memory requirements of muller conditions,” in Proceedings of 30th Annual Conferences of the European Association for Computer Science Logic, volume 216 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 12:1–12:17.
Casares, A., Colcombet, T., and Lehtinen, K. (2022). “On the size of good-for-games rabin automata and its link with the memory in muller games,” in Proceeings of 49th International Colloquium on Automata, Languages, and Programming, volume 229 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 117:1–117:20.
Chandra, A., Kozen, D., and Stockmeyer, L. (1981). Alternation. J. Assoc. Comput. Mach. 28, 114–133. doi: 10.1145/322234.322243
Colcombet, T. (2009). “The theory of stabilisation monoids and regular cost functions,” in Proceedings of 36th International Colloquium on Automata, Languages, and Programming, volume 5556 of Lecture Notes in Computer Science (Springer), 139–150.
Colcombet, T. (2013). Fonctions régulières de coût (Habilitation thesis). Université Paris Diderot-Paris 7, in French.
Esparza, J., Kretínský, J., and Sickert, S. (2018). “One theorem to rule them all: a unified translation of LTL into ω-automata,” in Proceedings of 33rd IEEE Symposium on Logic in Computer Science (IEEE), 384–393.
Faran, R., and Kupferman, O. (2020). “On (I/O)-aware good-for-games automata,” in 18th International Symposium on Automated Technology for Verification and Analysis, volume 12302 of Lecture Notes in Computer Science (Springer), 161–178.
Grädel, E., Thomas, W., and Wilke, T. (2002). Automata, Logics, and Infinite Games: A Guide to Current Research, volume 2500 of Lecture Notes in Computer Science. Springer.
Guha, S., Jecker, I., Lehtinen, K., and Zimmermann, M. (2021). “A bit of nondeterminism makes pushdown automata expressive and succinct,” in 46th International Symposium on Mathematical Foundations of Computer Science, volume 202 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 53:1–53:20.
Hahn, E., Perez, M., Schewe, S., Somenzi, F., Trivedi, A., and Wojtczak, D. (2020). “Good-for-MDPs automata for probabilistic analysis and reinforcement learning,” in Proceedings of 26th Int. Conf. on Tools and Algorithms for the Construction and Analysis of Systems, volume 12078 of Lecture Notes in Computer Science (Springer), 306–323.
Henzinger, T., and Piterman, N. (2006). “Solving games without determinization,” in Proceedings of 15th Annual Conference of the European Association for Computer Science Logic, volume 4207 of Lecture Notes in Computer Science (Springer), 394–410.
Hopcroft, J. (1971). “An nlogn algorithm for minimizing the states in a finite automaton,” in The Theory of Machines and Computations, ed Z. Kohavi (Academic Press), 189–196.
Jiang, T., and Ravikumar, B. (1993). Minimal NFA problems are hard. SIAM J. Comput. 22, 1117–1141. doi: 10.1137/0222067
Jutla, C. (1997). Determinization and memoryless winning strategies. Inf. Comput. 133, 117–134. doi: 10.1006/inco.1997.2624
Klarlund, N. (1992). “Progress measures, immediate determinacy, and a subset construction for tree automata,” in Proceedings of 7th IEEE Symposium on Logic in Computer Science (Santa Cruz, CA: IEEE Computer Society), 382–393.
Kuperberg, D., and Majumdar, A. (2018). “Width of non-deterministic automata,” in Proceedings of 35th Symposium on Theoretical Aspects of Computer Science, volume 96 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 47:1–47:14.
Kuperberg, D., and Skrzypczak, M. (2015). “On determinisation of good-for-games automata,” in Proceedings of 42nd International Colloquium on Automata, Languages, and Programming, 299–310.
Kupferman, O. (2018). “Automata theory and model checking,” in Handbook of Model Checking (Springer), 107–151.
Kupferman, O., Safra, S., and Vardi, M. (1996). “Relating word and tree automata,” in Proceedings of 11th IEEE Symposium on Logic in Computer Science, 322–333.
Kupferman, O., Safra, S., and Vardi, M. (2006). Relating word and tree automata. Ann. Pure Appl. Logic 138, 126–146. doi: 10.1016/j.apal.2005.06.009
Kupferman, O., and Sickert, S. (2021). “Certifying inexpressibility,” in Proceedings of 24th International Conference on Foundations of Software Science and Computation Structures, volume 12650 of Lecture Notes in Computer Science (Springer), 385–405.
Kupferman, O., and Vardi, M. (2005). “Safraless decision procedures,” in Proceedings of 46th IEEE Symposium on Foundations of Computer Science (Pittsburgh, PA: IEEE), 531–540.
Landweber, L. (1969). Decision problems for ω-automata. Math. Syst. Theory 3:376–384. doi: 10.1007/BF01691063
Lehtinen, K., and Zimmermann, M. (2022). Good-for-games ω-pushdown automata. Logical Methods Comput. Sci. 18, 2022. doi: 10.46298/lmcs-18(1:3)2022
Miyano, S., and Hayashi, T. (1984). Alternating finite automata on ω-words. Theor Comput. Sci. 32, 321–330. doi: 10.1016/0304-3975(84)90049-5
Morgenstern, G. (2003). Expressiveness results at the bottom of the ω-regular hierarchy (M.Sc. thesis). The Hebrew University.
Myhill, J. (1957). Finite automata and the representation of events. Technical Report WADD TR-57-624, Wright Patterson AFB, Ohio.
Nerode, A. (1958). Linear automaton transformations. Proc. Am. Math. Soc. 9, 541–544. doi: 10.1090/S0002-9939-1958-0135681-9
Niwinski, D., and Walukiewicz, I. (1998). “Relating hierarchies of word and tree automata,” in Proceedings of 15th Symposium on Theoretical Aspects of Computer Science, volume 1373 of Lecture Notes in Computer Science (Springer).
Pnueli, A. (1981). The temporal semantics of concurrent programs. Theor. Comput. Sci. 13:45–60. doi: 10.1016/0304-3975(81)90110-9
Pnueli, A., and Rosner, R. (1989). “On the synthesis of a reactive module,” in Proceedings of 16th ACM Symposium on Principles of Programming Languages, 179–190.
Rabin, M. (1969). Decidability of second order theories and automata on infinite trees. Trans. AMS 141:1–35. doi: 10.1090/S0002-9947-1969-0246760-1
Rabin, M. (1970). “Weakly definable relations and special automata,” in Proceedings of Symposium Mathematical Logic and Foundations of Set Theory (North Holland), 1–23.
Rabin, M., and Scott, D. (1959). Finite automata and their decision problems. IBM J. Res. Dev. 3, 115–125. doi: 10.1147/rd.32.0114
Safra, S. (1988). “On the complexity of ω-automata,” in Proceedings of 29th IEEE Symposium on Foundations of Computer Science (White Plains, NY: IEEE), 319–327.
Schewe, S. (2010). “Beyond hyper-minimisation–minimising DBAs and DPAs is NP-Complete,” in Proceedings of 30th Conference on Foundations of Software Technology and Theoretical Computer Science, volume 8 of Leibniz International Proceedings in Informatics (LIPIcs), 400–411.
Schewe, S. (2020). “Minimising good-for-games automata is NP-complete,” in Proceedings of 40th Conference on Foundations of Software Technology and Theoretical Computer Science, volume 182 of LIPIcs (Wadern: Schloss Dagstuhl-Leibniz-Zentrum für Informatik), 56:1–56:13.
Schewe, S., Tang, Q., and Zhanabekova, T. (2022). Deciding what is good-for-MDPs. CoRR, abs/2202.07629. doi: 10.48550/arXiv.2202.07629
Sistla, A. (1994). Safety, liveness and fairness in temporal logic. Formal Aspects Comput. 6, 495–511. doi: 10.1007/BF01211865
Keywords: automata, nondeterminism, infinite words (ω-languages), games, expressive power, succinctness, determinization
Citation: Kupferman O (2023) Using the past for resolving the future. Front. Comput. Sci. 4:1114625. doi: 10.3389/fcomp.2022.1114625
Received: 02 December 2022; Accepted: 22 December 2022;
Published: 13 January 2023.
Edited by:
Sven Schewe, University of Liverpool, United KingdomReviewed by:
Karoliina Lehtinen, UMR7020 Laboratoire d'Informatique et Systèmes (LIS), FranceCopyright © 2023 Kupferman. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Orna Kupferman,  orna@cs.huji.ac.il
orna@cs.huji.ac.il
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.