ORIGINAL RESEARCH
Published on 07 Aug 2018
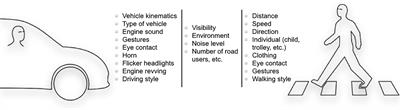
Communicating Intent of Automated Vehicles to Pedestrians
doi 10.3389/fpsyg.2018.01336
- 24,802 views
- 210 citations
22k
Total downloads
152k
Total views and downloads
Select the journal/section where you want your idea to be submitted:
ORIGINAL RESEARCH
Published on 07 Aug 2018
ORIGINAL RESEARCH
Published on 24 Apr 2018
ORIGINAL RESEARCH
Published on 20 Dec 2017
ORIGINAL RESEARCH
Published on 20 Nov 2017
ORIGINAL RESEARCH
Published on 14 Nov 2017
ORIGINAL RESEARCH
Published on 30 Oct 2017

REVIEW
Published on 13 Oct 2017

REVIEW
Published on 04 Oct 2017

ORIGINAL RESEARCH
Published on 23 Aug 2017

ORIGINAL RESEARCH
Published on 23 Aug 2017
PERSPECTIVE
Published on 15 Aug 2017
ORIGINAL RESEARCH
Published on 07 Jul 2017

Frontiers in Psychology
Frontiers in Robotics and AI