 Frontiers Production Office*
Frontiers Production Office*
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ERRATUM article
Front. Robot. AI, 13 June 2023
Sec. Robotic Control Systems
Volume 10 - 2023 | https://doi.org/10.3389/frobt.2023.1228130
by Rashid A, Alnaser I, Bdiwi M and Ihlenfeldt S (2023). Front. Robot. AI 10:1028411. doi: 10.3389/frobt.2023.1028411
Due to a production error, there was an error in the figures as published. The correct Figures 2–9, Figures 11, 12 appear below.
The article title was revised to read “Flexible sensor concept and an integrated collision sensing for efficient human-robot collaboration using 3D local global sensors”.
The publisher apologizes for these mistakes. The original version of this article has been updated.
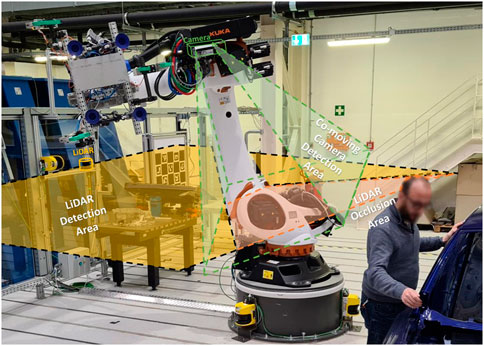
FIGURE 2. Proposed flexible and efficient sensor system.
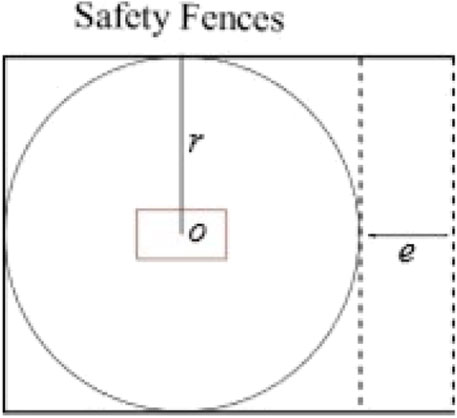
FIGURE 3. Simplified co-existence cell.
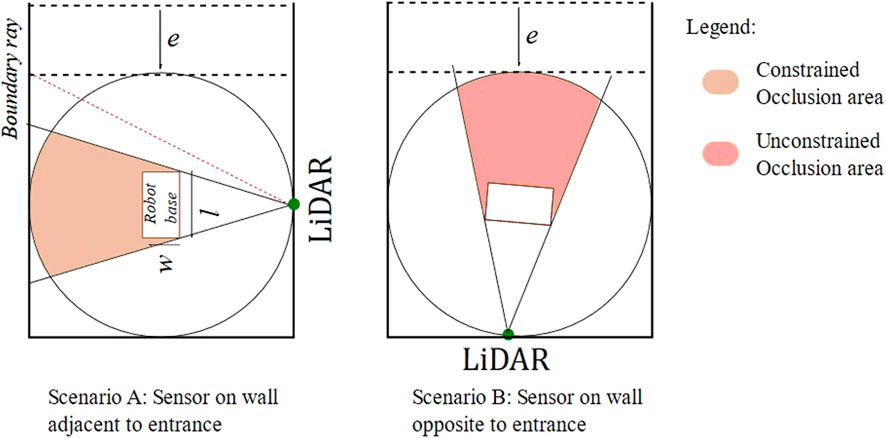
FIGURE 4. Different types of occlusions.
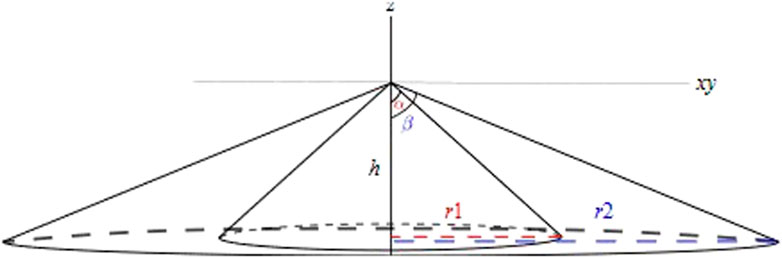
FIGURE 5. LiDAR sensor concept.
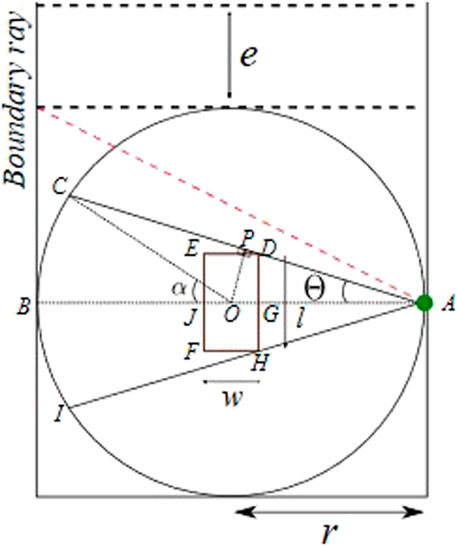
FIGURE 6. Constrained occlusion with sensor at middle of fence.
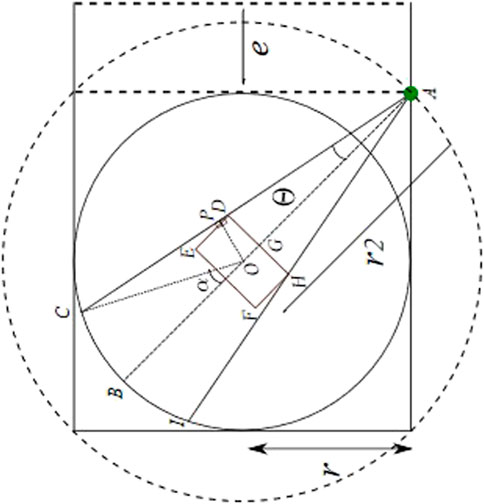
FIGURE 7. Constrained occlusion with sensor at the entrance.
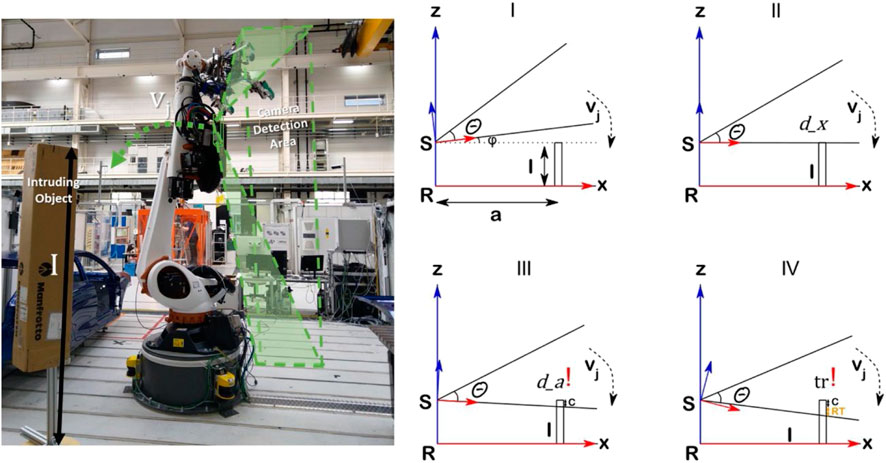
FIGURE 8. Data Capturing experiment for safety parameter estimation.
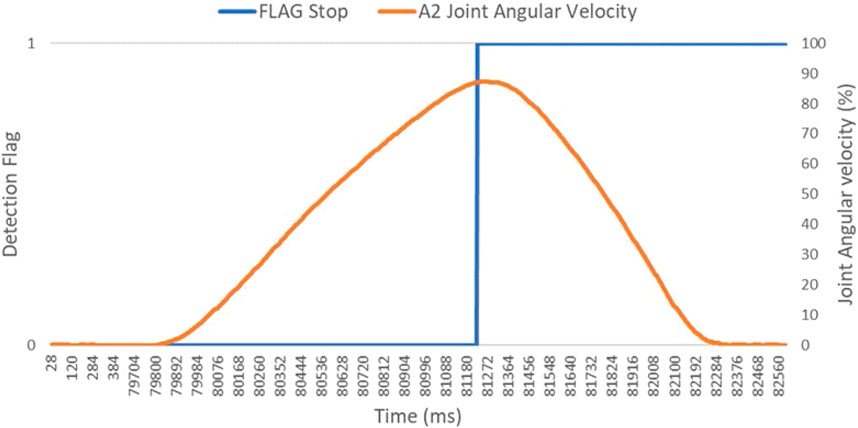
FIGURE 9. Complete trajectory for collision sensing and stop trigger for a single iteration.
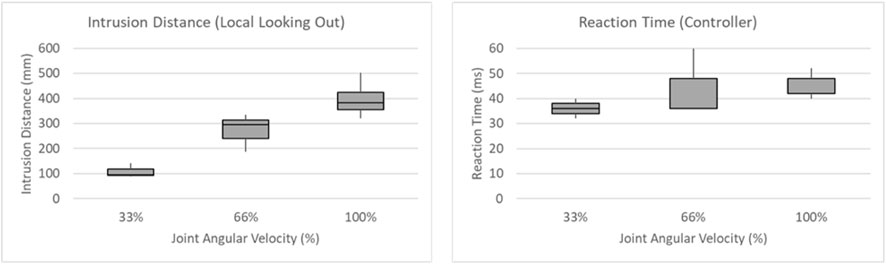
FIGURE 11. Box plot on multiple iterations at multiple robot velocities.
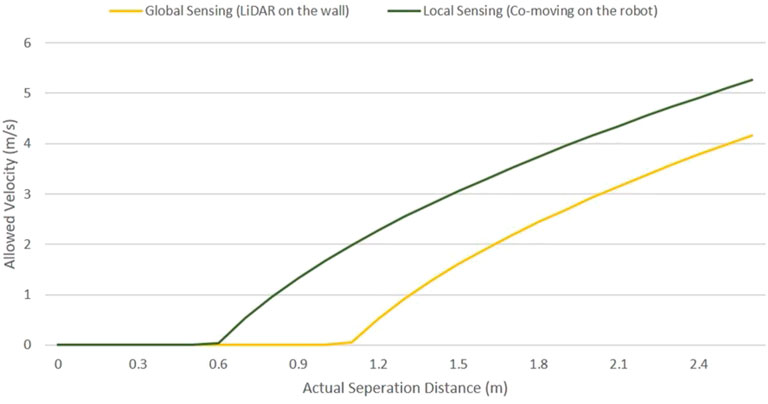
FIGURE 12. Safety distance and robot velocity for local (co-moving) and global collision sensing.
Keywords: collision avoidance, human–robot collaboration, intrusion distance, sensor concept, distance sensors
Citation: Frontiers Production Office (2023) Erratum: Flexible sensor concept and an integrated collision sensing for efficient human-robot collaboration using 3D local global sensors. Front. Robot. AI 10:1228130. doi: 10.3389/frobt.2023.1228130
Received: 24 May 2023; Accepted: 24 May 2023;
Published: 13 June 2023.
Approved by
Frontiers Editorial Office, Frontiers Media SA, SwitzerlandCopyright © 2023 Frontiers Production Office. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Frontiers Production Office, cHJvZHVjdGlvbi5vZmZpY2VAZnJvbnRpZXJzaW4ub3Jn
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.