 Andreas Kjær Dideriksen1*
Andreas Kjær Dideriksen1* Mads Fredslund Andersen2
Mads Fredslund Andersen2 Julian Priest2,3
Julian Priest2,3 Nikolaj Forskov Eriksen4,5
Nikolaj Forskov Eriksen4,5 Mads Toudal Frandsen4,5Claus Melvad1,6
Mads Toudal Frandsen4,5Claus Melvad1,6 Tobias Frejo Rasmussen7Noah Harry Kjeldgård Nielsen2
Tobias Frejo Rasmussen7Noah Harry Kjeldgård Nielsen2 Cecillie Thorup Strømsnes2Mads Juul Ahlebæk4,5Sigrid Samsing8Thomas Buris Larsen8Jeppe Don6
Cecillie Thorup Strømsnes2Mads Juul Ahlebæk4,5Sigrid Samsing8Thomas Buris Larsen8Jeppe Don6 Lasse Alexander Nissen Pedersen6Rune Hylsberg Jacobsen7Søren Rysgaard1
Lasse Alexander Nissen Pedersen6Rune Hylsberg Jacobsen7Søren Rysgaard1 Jung Min Kim7Robert Bayer3
Jung Min Kim7Robert Bayer3 Caroline Christensen9
Caroline Christensen9 Emil Fredsted Christiansen6
Emil Fredsted Christiansen6 Izabella Katharina Gosvig-Leach9
Izabella Katharina Gosvig-Leach9 Rasmus Gramstrup7
Rasmus Gramstrup7 Bóas Hermansson10Jesper Hesselvig6
Bóas Hermansson10Jesper Hesselvig6 Jonas Mariager Jakobsen11Daniel Gjesse Kjellberg3Magnus Sejer Lind6Jeppe Lindhard3
Jonas Mariager Jakobsen11Daniel Gjesse Kjellberg3Magnus Sejer Lind6Jeppe Lindhard3 Mads Mikkelsen2Oliver Millinge7Tara Møller Moltesen6Sebastian Dahl Negendahl2
Mads Mikkelsen2Oliver Millinge7Tara Møller Moltesen6Sebastian Dahl Negendahl2 Alexander Björn Kerff Nielsen11Gustav Balslev Nielsen10Maja Chieng Frisenberg Pedersen9Alexander Stegler Schøler Platz7
Alexander Björn Kerff Nielsen11Gustav Balslev Nielsen10Maja Chieng Frisenberg Pedersen9Alexander Stegler Schøler Platz7 Paul Rosero3
Paul Rosero3 Sofia Savic9Ívar Óli Sigurðsson3Gustav Skjernov9Nikolaj Sørensen3Samuel Grund Sørensen2Astrid Guldberg Theil2
Sofia Savic9Ívar Óli Sigurðsson3Gustav Skjernov9Nikolaj Sørensen3Samuel Grund Sørensen2Astrid Guldberg Theil2 Jacob Bay Thomsen2Nicolaj Valsted3
Jacob Bay Thomsen2Nicolaj Valsted3 Anna Vestergaard9
Anna Vestergaard9 Christoffer Karoff2,9,12
Christoffer Karoff2,9,12- 1Department of Biology, Arctic Research Centre, Aarhus University, Aarhus, Denmark
- 2Department of Physics and Astronomy, Aarhus University, Aarhus, Denmark
- 3Department of Computer Science, IT University of Copenhagen, Copenhagen, Denmark
- 4Department of Physics, Chemistry and Pharmacy, University of Southern Denmark, Odense, Denmark
- 5SDU Climate Cluster, University of Southern Denmark, Odense, Denmark
- 6Department of Mechanical and Production Engineering, Aarhus University, Aarhus, Denmark
- 7Department of Electrical and Computer Engineering, Aarhus University, Aarhus, Denmark
- 8Faculty of Engineering, University of Southern Denmark, Odense, Denmark
- 9Department of Geoscience, Aarhus University, Aarhus, Denmark
- 10Department of Computer Science, Aarhus University, Aarhus, Denmark
- 11Mads Clausen Institute, University of Southern Denmark, Odense, Denmark
- 12iCLIMATE Aarhus University Interdisciplinary Centre for Climate Change, Aarhus, Denmark
The severe impact of global warming, especially in the arctic region, have a multitude of consequences spanning from sea-level rises and freshening of the ocean, to significant changes to the animal life, biodiversity and species distribution. As the arctic regions are inherently remote and can be both hazardous and difficult to reach, research to improve our understanding of the climate change impact is often limited to short term field-campaigns. Here we present the Danish DISCO-2 student CubeSat mission, designed to meet the growing need for an Earth-observing platform. This mission leverages the rapid advancements in CubeSat technology over the past decades to overcome the limitations of traditional fieldwork campaigns. DISCO-2 will assist on-going arctic climate research with a payload of optical and thermal cameras in combination with novel in-orbit data analysis capabilities. It will further be capable of performing photogrammetric observations to determine ice volumes from deteriorating glaciers and provide surface temperatures, enabling studies of heat transfer between glaciers and arctic fjords. As a student satellite, the payload capabilities will also be offered to novel student research ideas throughout the mission life time. The modularity and wide range of of-the-shelf-components for CubeSats has facilitated an immense opportunity to tailor this earth observing CubeSat to accommodate specific scientific goals and further provided students at the participating universities with an unparalleled possibility to go from an initial research idea to a running CubeSat mission.
1 Introduction
The Arctic is one of the regions most severely impacted by climate change, with observed warming significantly faster than the global average Rantanen et al. (2022). Improving our understanding of the impact of these changes both locally and globally is a key factor in efforts to minimize and mitigate their influence. Studying the impact of climate changes in arctic regions has proven to be both costly and limited in relation to the physical extent of field-work campaigns, and arctic climate research therefore serves as a prime subject to benefit from remote sensing tools i.e., small satellites. Ever since the first suggestion of the CubeSat standard in the late 90 s and early 2000s to create low-cost space experimentation Heidt et al. (2000), the increased development of CubeSats has created a more affordable and faster way to launch increasingly complex instruments into orbit. This has allowed for numerous successful CubeSat missions from universities, research institutes, and companies. The low cost and relatively short development timescale for CubeSat missions have especially proven to be a benefit for universities to run student-driven missions Murphy et al. (2018); Jallad et al. (2023), as a typical timeline for these projects allows students to be involved in several if not all phases of a CubeSat mission Murphy et al. (2018). Danish universities have been key players in this development ever since the launch of the very first CubeSats in 2003, e.g., AAU CubeSat and DTUsat Alminde et al. (2004) and the continuous development of CubeSats has now enabled these nanosatellites to be used for scientific purposes or as cost-efficient proof of concept missions to test new technology for future missions Kramer and Cracknell (2008). DISCO-2 is a mission of such character and will be one of the most ambitious student CubeSats. The DISCO-2 mission builds on the experience gathered from the first CubeSat mission of Aarhus University, Delphini-1, the DISCO-1 mission, and by extending the mission with a scientific goal of contributing to arctic climate research the mission ensure a long-term application and commitment after the launch. DISCO-2 is the second CubeSat from the DanIsh Student CubeSat prOgramme DISCO, which is a collaboration between three Danish universities Aarhus University, IT University of Copenhagen, and University of Southern Denmark. DISCO-2 is a 3 unit + (3U+) CubeSat carrying a payload consisting of 2 optical cameras (1 “high-resolution” and 1 “wide-field”), a thermal camera for ground temperature measurements, and a System-on-Module (SoM) board enabling on-board data sorting/quality control using machine learning.
2 Mission objectives
The main objective of the DISCO program and hence also the DISCO-2 satellite is to give students at the participating universities hands-on experience with a wide variety of skills and know-how sought after within both the space sector and industry. A main priority for DISCO-2 is therefore to have student involvement in all aspects of the satellite; from the very early conception of mission objectives to daily operations and data users. This has led to several smaller groups of students running different parts of the mission, i.e., structure design, harnessing, printed circuit board (PCB) manufacturing, software development, integration, testing, operations, etc. By providing the opportunity to gain valuable practical experience with several aspects of satellite space technology and research, the DISCO program will make the participants more attractive to the high-tech and space industry. The massive student involvement is also an attempt to secure a steady pipeline of startups to the Danish ESA Business Incubation Centre. The early stages of the scientific motivation for DISCO-2 were also conceived by students and then further refined in collaboration with scientists at Arctic Research Centre and iCLIMATE at Aarhus University. The funding level for DISCO-2 is 400000 Euros (EUR).
2.1 Scientific motivation
DISCO-2 is devised as an Earth Observation (EO) platform to support ongoing arctic research conducted at participating universities. In particular, the scientific motivation is based on research conducted in northeast Greenland, where interactions between glaciers and fjord systems are already being studied using ground truth monitoring equipment Rysgaard et al. (2022) and data retrieved during fieldwork campaigns. Adding a dedicated EO platform in the form of a CubeSat will enable more frequent data acquisitions covering larger areas. To fully utilize the potential of the small CubeSat format it is therefore critical that the satellite will be able to monitor using both thermal and visible images.
2.1.1 Glacier-ocean interactions
To utilize an EO CubeSat for supporting ongoing arctic research in northeast Greenland, a combination of visible and thermal imaging is preferred to investigate a variety of interactions between glaciers and fjords, i.e., temperature gradients, heat dissipation and transport concerning surface temperatures and glacial deterioration. All of these interactions are important aspects to improve our understanding of ice-ocean interactions and the large-scale effects of climate changes in northeast Greenland.
Thermal imaging from an EO satellite will enable large-scale observations of surface thermal gradients in fjords. These gradients will enable further analysis of the water flow of fjords and hence be beneficial for the investigation of water circulation and analysis of heat exchange in northeast Greenland fjord systems. Using daily and long-term tracking of glacier surface temperatures will also enable further analysis of glacial deterioration and the interactions and effects between glaciers and their surroundings. Additional visible observations can further improve the investigation of both ocean surface flow and the deterioration of glaciers, as high-resolution imaging of the fjords will enable the tracking of smaller icebergs and possibly correlate the drift of these with thermal imaging to investigate surface flow. A combination of thermal and visible imaging will also enable the investigation of the effects of melting icebergs on the surface temperature in fjord systems.
With an EO CubeSat with thermal and visible observation capabilities, we also intend to investigate subglacial discharge plumes to improve our understanding of the ice-ocean interface, as the ocean effect on glaciers and ice-ocean interactions are still uncertain Everett et al. (2021). As subglacial discharge plumes are occurring in hazardous and remote areas, they represent a prime example of an ice-ocean interaction that will benefit from remote sensing observations. Observations of plumes are critical to understanding heat transfer between ocean and ice while they also play a role in the freshwater addition to the arctic fjords and potentially general freshening of the ocean with the accelerated temperature trend in the arctic Hewitt (2020).
Utilizing high temporal observations with both visible and thermal imaging of glacier fronts will enable a better understanding of the surface water-mixing which happens when positive buoyant freshwater from the plumes moves towards the surface layers of the saline fjord water. In addition, visible imaging can provide a usable tool when investigating the source of plumes i.e., change in extent of supraglacial lakes.
Given the remote nature of northeast Greenland, a dedicated EO platform will enable a high frequency of observations, creating a higher temporal resolution of thermal and visual changes on the ground, which will facilitate investigations into seasonal changes in heat accumulation. Recent Landsat observations at twilight, i.e., wintertime in the Arctic, have also revealed the applicability of thermal imaging in low-light winter conditions, to map and monitor changes in sea ice during polar night Scambos et al. (2024).
2.1.2 Photogrammetry
A key feature of DISCO-2 will be to investigate the ability to regularly perform photogrammetric imaging of large glaciers by utilizing a high-resolution camera in coordination with the attitude determination and control system (ADCS) to create 3-dimensional imaging of large-scale structures, i.e., glacier fronts (Ghuffar, 2018). By taking advantage of the high frequency of passes and acquiring multiple images at each pass, the changes in the volume of a glacier front can be analyzed over time. This will provide a tool to examine the volumes of ice that deteriorate from glaciers on seasonal and large single events.
2.2 In-orbit analysis
During passes of arctic areas, DISCO-2 have the ability to capture a very large number of high resolution images. The relatively low data rate and transfer window of the downlink create a potential bottleneck for images to be sent to Earth. To mitigate this the DISCO-2 payload is equipped with an image processing unit (IPU) inspired by a predecessor system on DISCO-1 Bayer et al. (2024) that allows for on satellite image analysis. The IPU consists of a flexible software image processing pipeline, which runs on a CPU and hardware NPU machine learning accelerator. The IPU is capable of standard image processing, and also Machine Learning (ML) tasks such as image identification, segmentation and classification. This allows DISCO-2 to analyse images at the rate of aquisition, and transmit only a small subset that match a given criteria back to Earth. Analyses range from simple tasks such as selecting correctly exposed images to more complex ML tasks. Currently in development are a snow/cloud discriminator that uses ML to reject images with over
2.3 Additional science
In addition to supporting ongoing Arctic research, DISCO-2 will also be available for general-purpose EO. As a student-driven CubeSat DISCO-2 will be applicable to perform observations for novel student research ideas and provide students with first-hand-experience in conducting EO. As a side effect of the arctic focus, the constraints on the orbit result in a practical total earth coverage with an increasing frequency of close passes as the orbit reaches the poles. This will further enable relatively rapid response time observations, making DISCO-2 able to perform observations of sudden large-scale events, for example, large changes in the landscape, thermal imaging of volcanoes, etc. These additional science cases will support the more general aims of the DISCO programme to showcase STEM subjects to a general audience and enabling students to get experience with space research.
2.4 Student involvement
The development, production and operation of DISCO-2 is relying on continuous student involvement from Aarhus University, Southern Danish University and IT University of Copenhagen. Currently more than 50 students ranging from 1st year bachelor students to master students have been involved with DISCO-2, and more students are expected to join for the next steps of DISCO-2. The students come from various department in example physics, engineering, computer science and geo-science. The participating students are also exposed to a variety of options to participate in space related coursework outside of DISCO-2 and several have participated in external courses hosted by ESA. The students are arranged in work groups with different focus i.e., groundstation, operations, test and assembly, harness, structure, Public Relations, etc. Together with staff members each work group identifies and resolves relevant tasks and have regular meetings both within the group and across the different work groups to both get a progress overview and identify tasks that needs input from multiple work groups. Staff members and some work group leaders are also appointed as section leaders and have status meetings every fortnight where larger issues and impediments can be discussed and mitigated/resolved.
3 Scientific requirements
To meet the scientific goals of DISCO-2, the satellite, particularly for the payload, will have to meet a set of requirements specifying the optics, hardware, and orbit of the satellite. In this section, we focus on describing some of the key requirements constrained by the scientific aims of DISCO-2.
3.1 Resolution
To obtain high-resolution images with high revisit frequency of the northeast Greenland fjords and glaciers, the cameras will require the ability to resolve typical northeast Greenland fjords and cover large sections of the fjords in a single frame. The most limiting feature the camera systems will need to meet is the ability to resolve surface sediment pools, caused by subglacial discharge plumes with positive buoyancy reaching the surface of the fjords and the glacier fronts. The plume pools are typically on the scale of a few hundred meters wide Mankoff et al. (2016); Jackson et al. (2017), while the ice cliff height above sea level for grounded ocean terminating glaciers can reach approximately 100 m Parizek et al. (2019). The sizes of the fjords vary significantly, with a width on the scale of a few kilometers at the head of the fjords, while the length of the fjords varies on the scale from tens to hundreds of kilometers Morlighem et al. (2017). This provides a requirement for the cameras to have a Ground Sampling Distance (GSD) on a sub-hundred-meter scale to resolve the glacier fronts and surface sediment pools and have entire fjords within the Field of View (FoV).
3.2 Thermal imaging
The thermal observations must be able to cover northeast Greenland fjords on the scale of kilometers to hundreds of kilometers to observe surface temperature gradients along and across the fjords. Similar to the optical camera requirement, the spatial resolution of the thermal camera should allow for tracking changes in the surface temperature of the sub-glacial discharge surface sediment pools. Given the longer wavelengths required to observe in the thermal range, the ability to sharply resolve the extent of the pools is not required. A spatial resolution requirement of 200 m per pixel will therefore satisfy the ability to observe temperature changes from surface sediment pools. In addition the thermal camera must be sensitive enough to observe changes in surface temperature with sufficient detail, as surface temperatures in Greenlandic fjords can experience significant changes on short temporal scale and physical extend Mortensen et al. (2014). Therefore the thermal camera must be able to resolve temperature gradients across an image with a precision better than a single degree Celsius.
3.3 Pointing
To optimize the satellite’s ability to perform photogrammetric observations of single specified targets during passes, the pointing of the satellite must be accurate enough to keep a target (glacial front, large iceberg, etc.) within the FoV of the cameras during a pass. This can translate to a pointing requirement for the ADCS to have the ability to control the orientation of the satellite during a pass to enable observations of targets at an array of different angles, which benefits the photogrammetric analysis. This means we need sufficient pointing accuracy to acquire a minimum of 5 observations of a specific target during a single pass. The targets are not required to be located on the same pixels for these 5 images. In order to maximize the amount of data for each target, the individual targets will be observed for multiple days. The ADCS should together with data reduction algorithms be capable of tagging the images with a set of rational polynomial coefficients (RPCs) that are needed for the photogrammetric analysis. RPCs relates ground coordinates to the corresponding image pixel coordinates using a set of polynomial (Sohn et al., 2003).
3.4 Orbital requirements
The geographic location of the main scientific research area places a requirement on the inclination of the satellite orbit. To optimize the temporal resolution (i.e., frequency in passes over northeast Greenland) the orbit of DISCO-2 should be a polar orbit. Adding a soft requirement of the orbit being sun-synchronous provides a benefit of revisits at specific points the same local time each pass, enabling a better comparison of images acquired at different days. The altitude of the orbit must also be able to keep DISCO-2 in orbit for two full seasons to cover seasonal variability. Between the lowest and highest latitudes of Greenland, the DISCO-2 satellite will have between 2 and 5 passes pr. day assuming a viewing zenith angle within 45°, with the number of good passes increasing with increasing latitude. The calculations are based on an orbital altitude of 510 km. The ground tracks for a near-polar orbit at an 97.4° inclination and
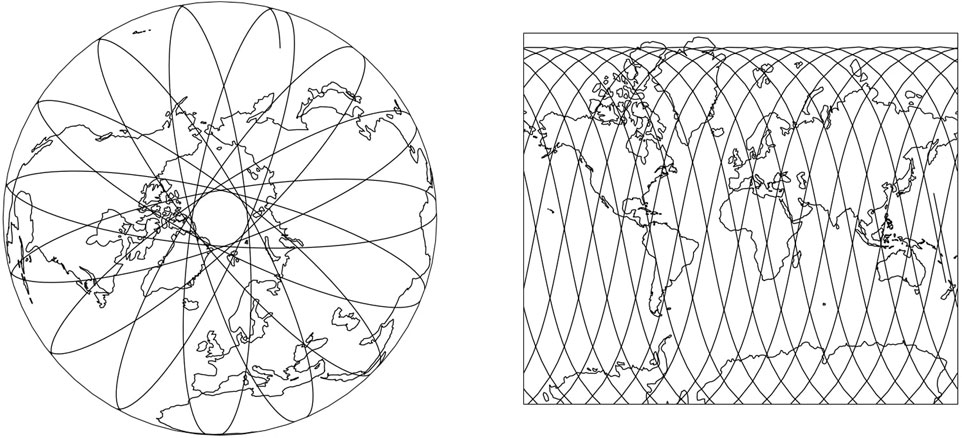
Figure 1. Ground track for near-polar orbiting satellite with altitude of 510 km and inclination of 97.4° for a 24 h duration. The ground tracks were made using the Skyfield python package Rhodes (2019).
4 Mission design
In collaboration with industry, the students designed the DISCO-2 CubeSat to match the standard Umax format (outer dim.) with flight-proven subsystems. The satellite bus parts are provided by Space Inventor, while the structure, payload, and the associated payload bracket were designed and selected by the students and staff of the DISCO-2 team. A 3D Computer-aided design (CAD) drawing of the DISCO-2 satellite is shown in Figure 2. DISCO-2 has been designed to have the cameras and directional S-band antennas on the same side to allow for both observational and high-rate data-downlink capability simultaneously. All main avionics are connected through a redundant control area network (CAN) bus applying CubeSat Space Protocol (CSP 2.01) for both internal communication between the subsystems and space-to-ground communication.
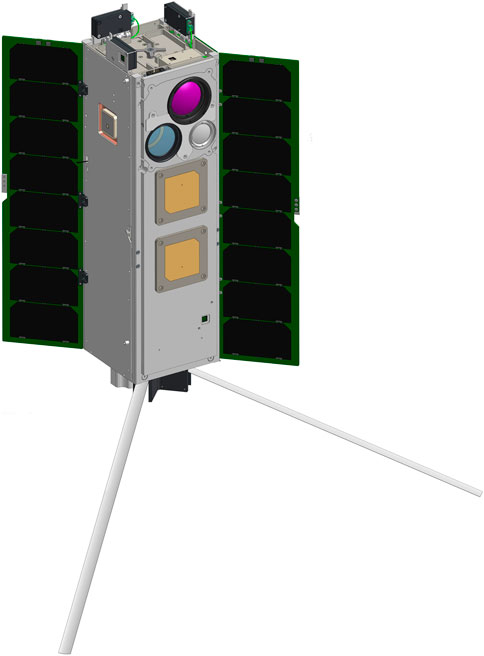
Figure 2. DISCO-2 in “flight mode” with fine sun sensors, solar panels and UHF antennas deployed. The backside of DISCO is covered with solar panels similar to the panels shown on the deployed solar panels. DISCO-2 is a 3U+ CubeSat, with outer dimensions
4.1 Payload
DISCO-2 will carry a payload consisting of 3 cameras and an IPU comprising 2 redundant System-on-modules (SoM) board for in-orbit data analysis and machine learning applications. The three cameras consist of two visible light cameras with different resolutions and FoV and a thermal camera. The key parameters for each camera are listed in Table 1. Test images from the low resolution optical camera and the thermal camera are shown in Figures 3, 4. Both visible cameras have global shutter. Focus for the cameras will be set to “infinity”, which in practice is a point beyond their hyperfocal distance, which are

Table 1. Key parameters for the cameras DISCO-2. The Field of View (FoV) and Ground Sampling Distance (GSD) is calculated theoretically (Theo) based on an orbital altitude of 510 km. Additionally the GSD for the optical cameras are also found through empiric measurements (Emp). The optical cameras are from Alvium, and the thermal from FLIR.
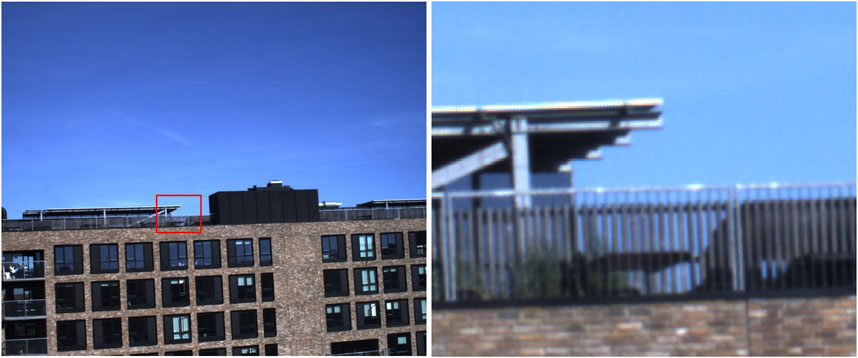
Figure 3. Sample image captured from the low resolution Alvium U-507 using the camera controller, using the auto-exposure finder with 10 ISO.
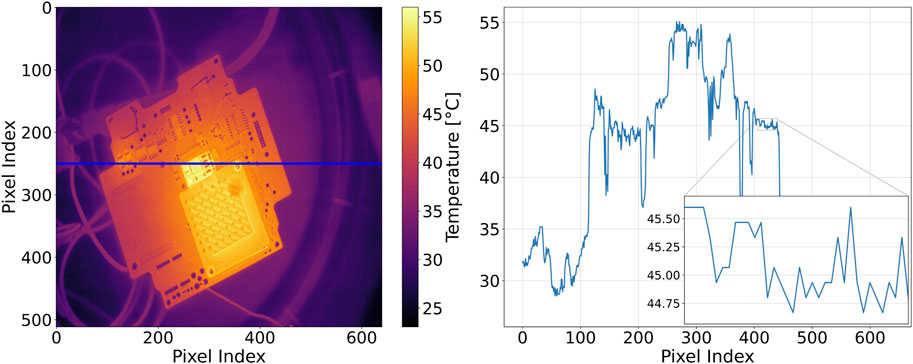
Figure 4. Test image from thermal camera. Left image shows a full frame test image of the payload PCB (
To be able to keep the cameras constrained to a volume of
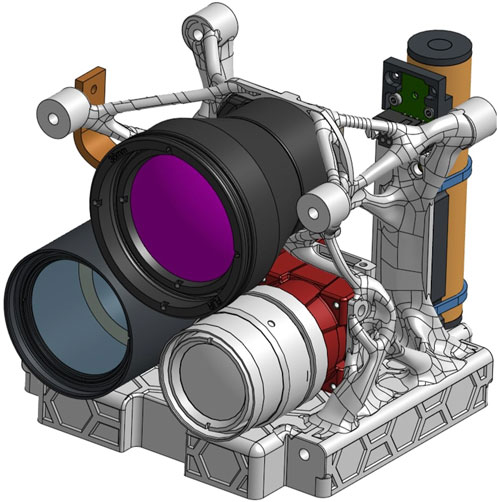
Figure 5. The vibrational load topology optimized payload bracket with payload. The outer dimensions of the payload bracket is approximately
4.1.1 Payload software
The software used to control the payload runs on dedicated processors independently from the flight control onboard computer (OBC). The payload computer has two independent SoM’s, each with three different types of processors; a 4-core A53 running Yocto-Linux, a low-power M7 core with FreeRTOS, and a neural processing unit (NPU) that can be accessed from the Linux system. The high-powered A53 cores are used for camera control and image processing and are kept suspended when not in use. The M7 core runs a scheduler with the responsibility for booting the Linux system when it needs to be accessed, sending commands to the payload, and powering it off afterward to minimize power usage. Setup and control of the scheduler is done using a domain-specific language (DSL) developed for it, called Proc. It uses the CSP and the parameter system, Param, provided by Space Inventor which is also used in the other components of the satellite. The DSL allows coding both simple and complex procedures with flow control and branching, based on parameters from various components. It makes it possible for example, to wake up the power-hungry A53 cores and start taking images when entering a geofenced area based on coordinate parameters from the GNSS module. To better utilize the downlink bandwitdh, the DISCO-2 IPU is capable of in-orbit image processing, for example, compression, image classification or discarding of bad images automatically. Depending on the project images are taken for, the requirements for onboard processing will differ. For this task, we introduce an image processing pipeline (DISCO Image Processing Pipeline, DIPP) with modularity and configurability as its key attributes. New modules can be uploaded to the satellite as compiled.so (shared object) files, along with configurations that chain modules together, where the commands for taking images include the configuration name, for identifying the pipeline, it should be passed through. The different repositories with DIPP and other modules are available on GitHub2.
4.1.2 Global navigation satellite system (GNSS)
The payload area will include a Skytraq Orion B16 GNSS module with modified firmware to provide accurate positioning, which will be recorded along each image acquisition to obtain accurate time and position stamps. The Orion B16 GNSS module has a positioning accuracy of 2.0 m Circular Error Probability (CEP), velocity accuracy of
4.2 Onboard computer (OBC)
The OBC handles the flight software on the satellite including the ADCS. The flight software and the ADCS are separated into two plates placed on each side of the module. The flight software platform consists of two independent ARM cortex-M7 modules, each with a separate power supply, interfacing, and storage. The dual architecture makes it a suitable choice for hot/cold redundancy solutions. The OBC further enables
4.3 Power system
The power system on DISCO-2 consists of body-mounted solar panels, 2 deployable solar panels, a maximum power point tracker (MPPT), a battery, and two power distribution units (PDU). Azure Space Cell Assembly 3G30A were selected. Among other features they include a 30% triple junction GaAs, to optimize power production at different wavelengths. The deployable solar panels will be released after DISCO-2 has been launched from the CubeSat pod using a flight-proven hold-down-release mechanism. The MPPT ensures optimal operating voltage is achieved for the individual solar cell arrays during different temperatures and irradiance levels. The MPPT is further supplied with a current and over-voltage protection for the battery output, to prevent overcharging and a pass-through mechanism allows for the satellite to pass solar output directly to the battery in case of battery power dissipation, potentially preventing complete loss of the satellite. The battery pack on DISCO-2 is an 8-cell Lithium-ion battery pack in a 4s2P configuration with a nominal capacity of
4.4 Communications
To enable communication between DISCO-2 and the ground station, it is equipped with both low-rate UHF and high-rate S-band radio channels. The UHF radio system features dual hot redundancy and is tailored for nanosatellites with a Low Earth Orbit (LEO) lifespan of up to 5 years. The Telemetry, Tracking, and Command (TTC) transceiver connects to a pair of UHF monopole antennas, forming an omnidirectional antenna system with an approximate data rate of 9.6 kbps. These antennas deploy from the satellite after it is released from the pod. DISCO-2 is equipped with both receiving and transmitting S-band antenna patches on the Earth-facing front. The S-band radios operate in the frequency sub-bands of 2025–2210
4.4.1 Ground segments
The ground segment for DISCO-2 consists of an S-band dish antenna for image payload data download located at SDU and UHF antennas at AU, ITU, and SDU for TTC. The antenna systems are mounted on an azimuth/elevation-controlled rotor platform to allow tracking of the CubeSat during its passes. The S-band antenna at SDU consists of a

Table 2. Key characteristics of the S-band antenna system.
4.5 Attitude determination and control system (ADCS)
4.5.1 Reaction wheels
The main actuators on DISCO-2 are the reaction wheels. The four reaction wheels are arranged in a pyramid configuration, overlapping cover the 3 degrees of rotational freedom as shown in Figure 6. This redundancy allows continuous attitude control in the case of one reaction wheel failure. Over time, the momentum of the reaction wheels will increase due to environmental torques, i.e., drag force, radiation pressure, and the interaction between spacecraft battery and geomagnetic field. Eventually, the reaction wheels will be saturated and not able to counteract the impacts of torque. To de-saturate the reaction wheels, magnetorquers are used Wafi et al. (2022).

Figure 6. The ADCS components positions within the DISCO-2 CubeSat structure of
4.5.2 Magnetorquers
The magnetorquers are essentially electromagnetic coils that interact with the geomagnetic field when current runs through them. They provide an external torque, making it possible to dump momentum build up in the reaction wheels. They are not useful for precise pointing, but proves useful for the initial de-tumbling phase of DISCO-2 immediately after deployment from the CubeSat pod.
4.5.3 Fine sun sensors
On each fine sun sensor, two perpendicular slits are carved into the compartment. On the bottom of the compartment, a reticle pattern is carved such that an electrical signal is produced when light hits the bottom (Chen and Lerner, 1999). The fine sun sensors output a sun vector and together with the current position of the spacecraft and an ephemeris of the sun the current attitude can be estimated to within 1°with
4.5.4 Magnetometers
Magnetometers can be modelled as inductors in an inductor-capacitor (LC) circuit. The effective inductance in such a circuit depends on the ambient magnetic field through the coil and thus the magnetometers can estimate the strength of the magnetic field surrounding the CubeSat. Together with the position of the spacecraft and the international geomagnetic reference field, the attitude can be estimated within 1°.
4.5.5 Multiplicative extended Kalman filter (MEKF)
The onboard attitude determination is estimated through a MEKF. The filter uses the available measurements from the sensors to update the attitude and state of the spacecraft as well as the associated uncertainties. The filter utilizes knowledge of the control torques to propagate the latest estimate of the attitude. The sensor measurement uncertainties can be chosen freely and the process noise can be modified. The initial process noise is used when propagating the attitude estimate between observations (Lawrence Fallon, 1999).
4.5.6 Linear quadratic regulator (LQR)
The LQR considers the current state, the attitude, and the angular velocity and determines the control voltage on the reaction wheels (Helmy et al., 2023). The LQR input is a user-defined gain, allowing the operators to tailor the behavior of the LQR.
5 Harness
Three different wire types are used in the satellite. The first type is a 1 mm diameter wire that requires a bending radius of greater than 3 mm. This wire type is the most commonly used in this satellite. The second wire type is a 3 mm diameter wire with a minimum bending radius of 15 mm. This wire is used for the UHF and S-band antennas. The minimum bending radius is determined based on the dynamical stress impacting the wires due to vibrations during launch. The third wire is an interconnecting PCB to reduce mass and complexity compared to wire-splicing. The PCB connects the IMU, OBC, and one of the PDUs.
Due to a lack of power outputs from the PDUs, some components must share a power output which could be achieved using wire splicing. Generally, splicing wires is not optimal, as it risks developing into a failure point. Therefore, the payload PCB is used to divide the power inputs into multiple outputs for the power-sharing components in the payload as well as the fine sun sensors on top of the satellite. However, one wire is spliced to share power between the two fine sun sensors not placed on top.
6 Mission timeline
The DISCO-2 project began on the 18th of November, 2020. In 2021, the project welcomed its first students and prioritized fundraising for a successful startup. The design phase was a major focus in 2022 and 2023. The preliminary design review (PDR) took place in May 2023, followed by the critical design review (CDR) in September of the same year. A similar PDR and CDR with focus on the payload and ground station was conducted in January 2024 (PDR) and September 2024 (CDR). In 2023, the DISCO-2 project also expanded with the addition of new students, enhancing the expertise of each project group. One team is responsible for the assembly and test training scheduled for mid-2024, which will then be used to create the CubeSat later that year. The launch of DISCO-2 is scheduled to happen in June 2025, followed by the launch and early operations phase (LEOP). The timeline of DISCO-2 from 2021 to 2026 is depicted in Figure 7 as a simplified Gantt chart where the detailed steps are summarized.
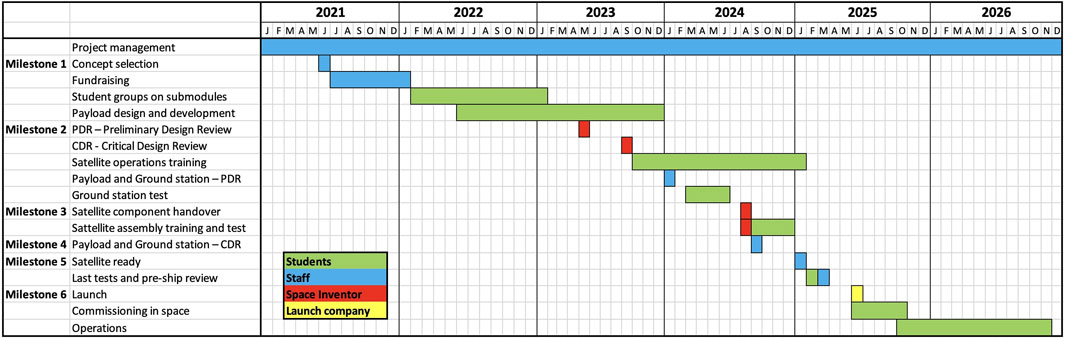
Figure 7. Mission timeline of DISCO-2 shown in a simplified Gantt chart.
7 Analysis, test, and verification
In Denmark it is mandatory to apply for launch permission from the Danish state under the Danish Space Act to be allowed to launch a satellite. This application must include a risk analysis of the mission, focusing on three key aspects: ensuring the satellite will be deorbited within 25 years after the mission ends, preventing the satellite from breaking up in orbit during this period, and ensuring that all parts of the satellite will burn up in the atmosphere during re-entry. Additionally, since DISCO-2 will be launched from the US, it must comply with the Federal Communications Commission (FCC) space safety and orbital debris policy. This policy, in addition to the Danish Space Act requirements, mandates “complete disposal as soon as practicable following the end of the mission, and no later than 5 years after the end of the mission.” To document that DISCO-2 meets these requirements, we have designed the test and verification program described below.
7.1 DRAMA analysis
We use the Debris Risk Assessment and Mitigation Analysis (DRAMA) tool provided by the European Space Agency (Braun et al., 2020) to analyze the orbital lifetime, collision probability, and re-entry risk for DISCO-2. The satellite mass is set to 6 kg based on the current mass budget with an added safety margin varying between

Table 3. Orbital parameters used for DRAMA software to estimate orbital lifetime, collision risk and risk assessment during re-entry.
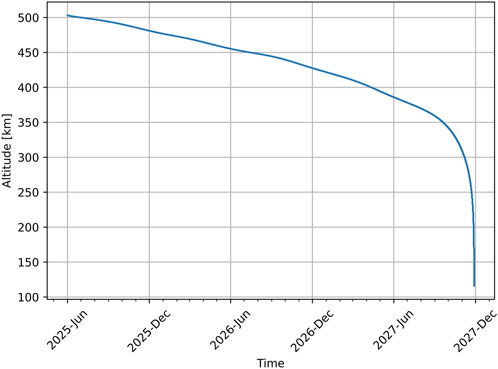
Figure 8. Orbital decay of DISCO-2, assuming an average cross-section from random tumbling of
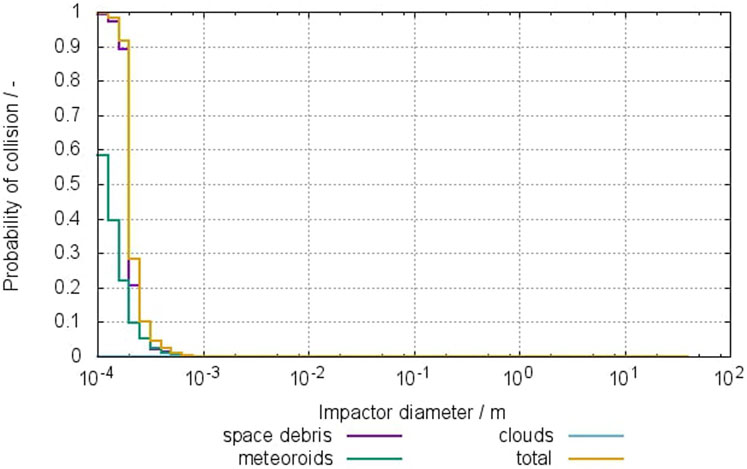
Figure 9. Impact probability vs. object size for DISCO-2 assuming worst case scenario random tumbling with an average cross-section of.
7.2 Pointing analysis
The narrow-angled camera has a FoV of roughly 3° from the center of the image plane. Simulation tests have been conducted, determining whether or not the pointing accuracy of the ADCS is high enough to maintain target within the camera field of view during an overpass. Two tests over two different points of interest (PoIs) have been simulated. Over the first PoI, the CubeSat flies shaded by Earth and over the second PoI, the CubeSat is in illuminated flight. This allows us to test the ADCS with and without the fine sun sensors. The test results can be seen in Figure 10. The pointing error is below 3° around all body axes with uncertainty less than 1° both in illuminated and shaded flights. As the FoV for the high resolution camera is
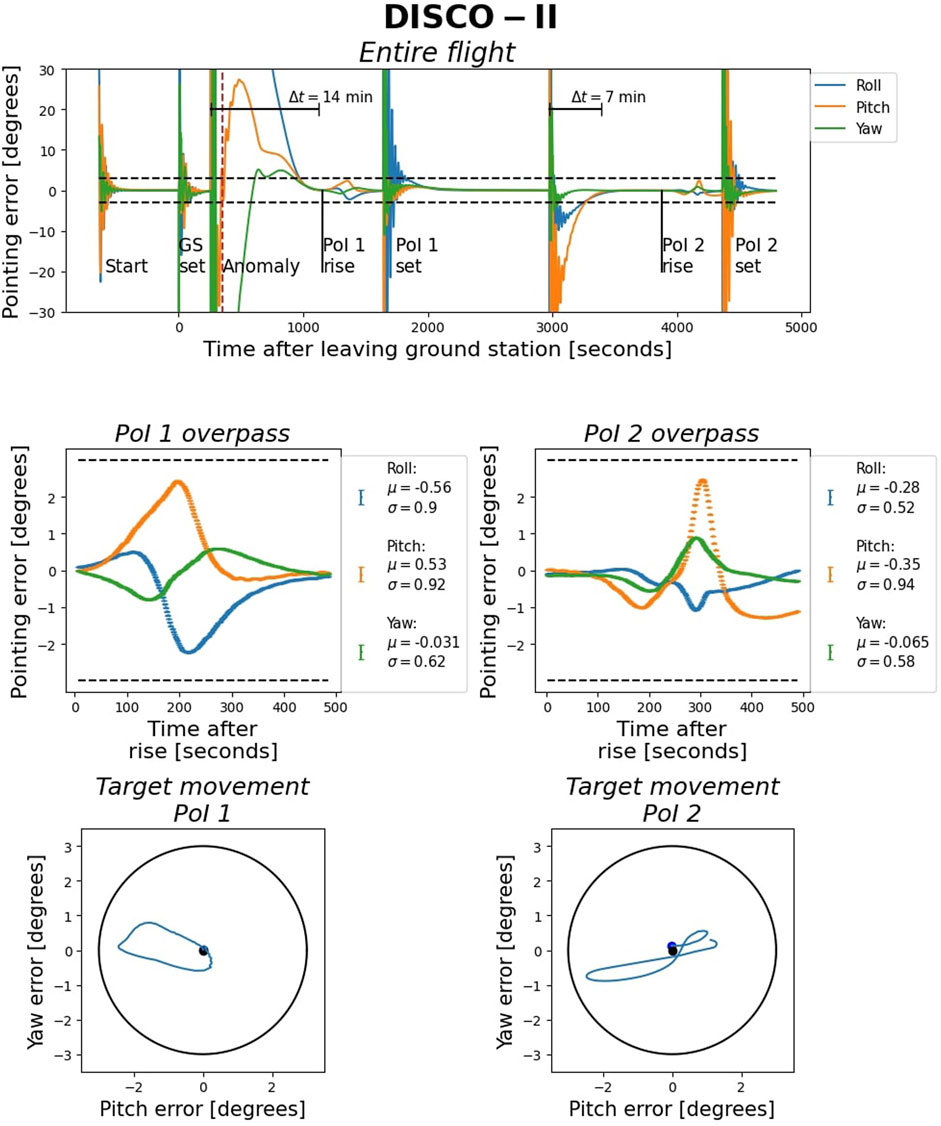
Figure 10. The results of the pointing accuracy test. DISCO-2 flies over first point of interest (PoI) shaded and over the second PoI while illuminated by the sun. The pointing errors are measured around each body axis. Roll is around the
7.3 Functional and environmental test
A team of students will assemble and conduct functional components tests of DISCO-2 during assembly. The test scheme is developed at Space Inventor and will serve as a base to develop a protocol for DISCO-2 when performing functional inspections of components between each step of environmental tests. DISCO-2 will be subjected to component testing throughout the assembly to test both the individual components and redundant communication between subsystems. This will also serve as a way to develop the final test procedure when conducting environmental tests on the assembled satellite. The environmental test will consist of a vibrational analysis of the assembled satellite with random vibration on each axis, with a functionality test between each axis-specific vibration. Further DISCO-2 will be subdue to thermal-vacuum cycling test, to ensure the functionality of the CubeSat in a space like environment prior to launch.
8 Operations
Because DISCO-2 is a student satellite we can expect that people with different backgrounds would need to be able to operate the satellite. To accomplish this, students are developing an operations and mission control platform, which will aid the collaboration between operators and make the satellite accessible with a low barrier of entry, not requiring a background in programming to be able to operate it. This platform consists of a web interface, that operators will use to set up flight plans and configure the satellite and image processing. A flight plan is a list of commands set to be executed at a specific time. This allows detailed planning of the satellite operations while not in direct contact with the ground station. Using what is then essentially a block programming language, the control panel makes it possible to set up a flight plan for the satellite without having to worry about what in a programming term is called boilerplate code–repeated code required to enable other functionality, i.e., the default commands that should always be run (e.g., for collecting the housekeeping data) and properly managing variables and component configurations. It will also be possible to easily configure the DIPP with existing or new modules, that have been compiled for it. An overview of the data flow and communication processes for operations tasks is shown in Figure 11.
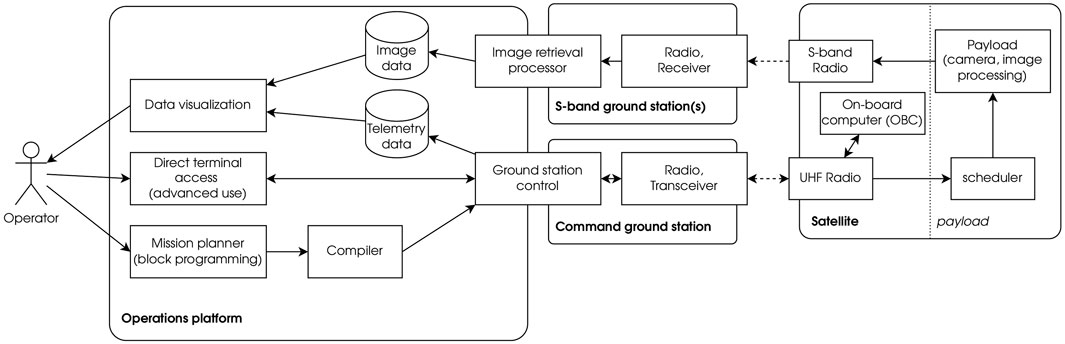
Figure 11. A simplified overview of the operations and communication processes. Arrows indicate direction of data flow.
Flight plans get compiled to the Proc DSL and during the satellite overpass, they can automatically be sent through the ground station to the satellite where it is stored in the payload scheduler running on the M7 core. With this automation, operators will be able to set up unsupervised transmissions e.g., for communicating at night when everyone is asleep, and it makes supervised control more efficient compared to manual control, which is limited by the operator’s reaction speed to parse command output and react correspondingly.
9 Conclusion
The 3U+ DISCO-2 satellite presented here is one of the most ambitious student CubeSat in the world to date. The EO student CubeSat mission started in 2020 as a collaboration between the three danish universities Aarhus University, Southern Danish University and IT University of Copenhagen. DISCO-2 is planned to launch in 2025 and will be placed into a near-polar orbit with a nominal mission lifetime of
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
AD: Writing–original draft, Writing–review and editing. MFA: Writing–original draft, Writing–review and editing. JP: Writing–original draft, Writing–review and editing. NE: Writing–original draft, Writing–review and editing. MF: Writing–original draft, Writing–review and editing. CM: Writing–original draft, Writing–review and editing. TR: Writing–original draft, Writing–review and editing. NN: Writing–original draft, Writing–review and editing. CS: Writing–original draft, Writing–review and editing. MJA: Writing–original draft, Writing–review and editing. SiS: Writing–review and editing. TL: Writing–review and editing. JD: Writing–original draft, Writing–review and editing. LP: Writing–original draft, Writing–review and editing. RJ: Writing–review and editing. SR: Writing–review and editing. JK: Writing–review and editing. RB: Writing–review and editing. CC: Writing–review and editing. EC: Writing–review and editing. IG-L: Writing–review and editing. RG: Writing–review and editing. BH: Writing–review and editing. JH: Writing–review and editing. JJ: Writing–review and editing. DK: Writing–review and editing. ML: Writing–review and editing. JL: Writing–review and editing. MM: Writing–review and editing. OM: Writing–review and editing. TM: Writing–review and editing. SN: Writing–review and editing. AN: Writing–review and editing. GN: Writing–review and editing. MP: Writing–review and editing. AP: Writing–review and editing. PR: Writing–review and editing. SoS: Writing–review and editing. ÍS: Writing–review and editing. GS: Writing–review and editing. NS: Writing–review and editing. SaS: Writing–review and editing. AT: Writing–review and editing. JT: Writing–review and editing. NV: Writing–review and editing. AV: Writing–review and editing. CK: Writing–original draft, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. We acknowledge support from The Danish Industry Foundation, The Carlsberg Foundation, Aage V Jensens Foundations (grant number 2021-12-30 Greenland gradient flagship project), Thomas B. Thrige Foundation, ESA, SDU Climate Cluster, CenSec.
Acknowledgments
We want to acknowledge Space Inventor for our collaboration with the DISCO-2 CubeSat project. We also want to acknowledge all of the students participating in DISCO-2 for their contributions to the mission.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1https://github.com/libcsp/libcsp/tree/libcsp-2-0
References
Alminde, L., Bisgaard, M., Vinther, D., Viscor, T., and Østergard, K. Z. (2004). The aau-cubesat student satellite project: architectural overview and lessons learned. IFAC Proc. 37, 949–954. doi:10.1016/s1474-6670(17)32301-7
Bayer, R., Priest, J., and Tözün, P. (2024). “Reaching the edge of the edge: image analysis in space,” in Proceedings of the eighth workshop on data management for end-to-end machine learning (New York, NY, USA: Association for Computing Machinery DEEM ’24), 29–38. doi:10.1145/3650203.3663330
Braun, V., Funke, Q., Lemmens, S., and Sanvido, S. (2020). Drama 3.0 - upgrade of esa’s debris risk assessment and mitigation analysis tool suite. J. Space Saf. Eng. 7, 206–212. doi:10.1016/j.jsse.2020.07.020
Chen, L. C., and Lerner, G. M. (1999). “Sun sensor models,” in Spacecraft attitude determination and control. Editor J. R. Wertz (Dordrecht, Holland: Kluwer Acedemic Publishers).
Everett, A., Murray, T., Selmes, N., Holland, D., and Reeve, D. E. (2021). The impacts of a subglacial discharge plume on calving, submarine melting, and mélange mass loss at helheim glacier, south east Greenland. J. Geophys. Res. Earth Surf. 126, e2020JF005910. doi:10.1029/2020JF005910
Ghuffar, S. (2018). Dem generation from multi satellite planetscope imagery. Remote Sens. 10, 1462. doi:10.3390/rs10091462
Heidt, M., Puig-suari, P., Augustus, P., Moore, S., Nakasuka, P., Robert, P., et al. (2000). Cubesat: a new generation of picosatellite for education and industry low-cost space experimentation.
Helmy, M., Hafez, A. T., and Ashry, M. (2023). Cubesat attitude control via linear quadratic regulator (lqr). J. Phys. Conf. Ser. 2616, 012022. doi:10.1088/1742-6596/2616/1/012022
Hewitt, I. J. (2020). Subglacial plumes. Annu. Rev. Fluid Mech. 52, 145–169. doi:10.1146/annurev-fluid-010719-060252
Jackson, R. H., Shroyer, E. L., Nash, J. D., Sutherland, D. A., Carroll, D., Fried, M. J., et al. (2017). Near-glacier surveying of a subglacial discharge plume: implications for plume parameterizations. Geophys. Res. Lett. 44, 6886–6894. doi:10.1002/2017GL073602
Jallad, A.-H., Camps, A., Marpu, P., AlMazrouei, M., Ba-Layth, A., Aleissaee, S., et al. (2023). “Overview of alainsat-1 mission: a remote sensing student nanosatellite,” in Igarss 2023 - 2023 IEEE international geoscience and remote sensing symposium, 241–244. doi:10.1109/IGARSS52108.2023.10282020
Johnstone, A. (2022). CubeSat design specification rev 14. Advanced Technology Laboratories (BLDG 7), Engineering IV (BLDG 192): Cal Poly SLO, 1.
Kramer, H., and Cracknell, A. (2008). An overview of small satellites in remote sensing. Int. J. Remote Sens. 29, 4285–4337. doi:10.1080/01431160801914952
Lawrence Fallon, I. (1999). “Recursive least-squares estimators and kalman filters,” in Spacecraft attitude determination and control. Editor J. R. Wertz (Dordrecht, Holland: Kluwer Acedemic Publishers).
Mankoff, K., Straneo, F., Cenedese, C., Das, S., Richards, C., and Singh, H. (2016). Structure and dynamics of a subglacial discharge plume in a Greenlandic fjord. J. Geophys. Res. Oceans 121, 8670–8688. doi:10.1002/2016JC011764
Morlighem, M., Williams, C. N., Rignot, E., An, L., Arndt, J. E., Bamber, J. L., et al. (2017). Bedmachine v3: complete bed topography and ocean bathymetry mapping of Greenland from multibeam echo sounding combined with mass conservation. Geophys. Res. Lett. 44 (11), 11051–11061. doi:10.1002/2017GL074954
Mortensen, J., Bendtsen, J., Lennert, K., and Rysgaard, S. (2014). Seasonal variability of the circulation system in a west Greenland tidewater outlet glacier fjord, Godthåbsfjord (64°N): godthåbsfjord. J. Geophys. Res. Earth Surf. 119, 2591–2603. doi:10.1002/2014JF003267
Murphy, D., Joe, F., Thompson, J. W., Doyle, M., Erkal, J., Gloster, A., et al. (2018). EIRSAT-1 - the educational Irish research satellite. ESA.
Parizek, B. R., Christianson, K., Alley, R. B., Voytenko, D., Vaňková, I., Dixon, T. H., et al. (2019). Ice-cliff failure via retrogressive slumping. Geology 47, 449–452. doi:10.1130/G45880.1
Rantanen, M., Karpechko, A. Y., Lipponen, A., Nordling, K., Hyvärinen, O., Ruosteenoja, K., et al. (2022). The arctic has warmed nearly four times faster than the globe since 1979. Commun. Earth and Environ. 3, 168. doi:10.1038/s43247-022-00498-3
Rhodes, B. (2019). Skyfield: high precision research-grade positions for planets and Earth satellites generator. Astrophys. Source. Code Libr.
Rysgaard, S., Bjerge, K., Boone, W., Frandsen, E., Graversen, M., Thomas Høye, T., et al. (2022). A mobile observatory powered by sun and wind for near real time measurements of atmospheric, glacial, terrestrial, limnic and coastal oceanic conditions in remote off-grid areas. HardwareX 12, e00331. doi:10.1016/j.ohx.2022.e00331
Scambos, T. A., Shuman, C., Fahnestock, M., Snow, T., and Crawford, C. J. (2024). Monitoring polar ice change in the twilight zone. Eos. Am. Geophys. Union 105. doi:10.1029/2024EO240048
Sohn, H.-G., Park, C.-H., and Yu, H.-U. (2003). Application of rational function model to satellite images with the correlation analysis. KSCE J. Civ. Eng. 7, 585–593. doi:10.1007/BF02838321
Stankevich, S., Popov, M., Shklyar, S., Sukhanov, K., Andreiev, A., Lysenko, A., et al. (2020). Subpixel-shifted satellite images superresolution: software implementation. WSEAS Trans. Comput. 19, 31–37. doi:10.37394/23205.2020.19.5
Keywords: CubeSat, arctic climate, remote sensing, machine learning, student involvement, photogrammetry
Citation: Dideriksen AK, Andersen MF, Priest J, Eriksen NF, Frandsen MT, Melvad C, Rasmussen TF, Nielsen NHK, Strømsnes CT, Ahlebæk MJ, Samsing S, Larsen TB, Don J, Pedersen LAN, Jacobsen RH, Rysgaard S, Kim JM, Bayer R, Christensen C, Christiansen EF, Gosvig-Leach IK, Gramstrup R, Hermansson B, Hesselvig J, Jakobsen JM, Kjellberg DG, Lind MS, Lindhard J, Mikkelsen M, Millinge O, Moltesen TM, Negendahl SD, Nielsen ABK, Nielsen GB, Pedersen MCF, Platz ASS, Rosero P, Savic S, Sigurðsson ÍÓ, Skjernov G, Sørensen N, Sørensen SG, Theil AG, Thomsen JB, Valsted N, Vestergaard A and Karoff C (2024) DISCO-2 – an ambitious earth observing student CubeSat for arctic climate research. Front. Remote Sens. 5:1474560. doi: 10.3389/frsen.2024.1474560
Received: 01 August 2024; Accepted: 18 October 2024;
Published: 30 October 2024.
Edited by:
Xiaoguang Xu, University of Maryland, Baltimore, United StatesReviewed by:
Craig Glennie, University of Houston, United StatesLev V. Eppelbaum, Tel Aviv University, Israel
Copyright © 2024 Dideriksen, Andersen, Priest, Eriksen, Frandsen, Melvad, Rasmussen, Nielsen, Strømsnes, Ahlebæk, Samsing, Larsen, Don, Pedersen, Jacobsen, Rysgaard, Kim, Bayer, Christensen, Christiansen, Gosvig-Leach, Gramstrup, Hermansson, Hesselvig, Jakobsen, Kjellberg, Lind, Lindhard, Mikkelsen, Millinge, Moltesen, Negendahl, Nielsen, Nielsen, Pedersen, Platz, Rosero, Savic, Sigurðsson, Skjernov, Sørensen, Sørensen, Theil, Thomsen, Valsted, Vestergaard and Karoff. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Andreas Kjær Dideriksen, YWtkQGJpby5hdS5kaw==