 Yuan Lin1*
Yuan Lin1* Fei Yu
Fei Yu- 1College of Electrical and Information Engineering, Hunan Institute of Engineering, Xiangtan, China
- 2School of Computer and Communication Engineering, Changsha University of Science and Technology, Changsha, China
In this article, a new method for generating grid multi-wing chaotic attractors from fractional-order linear differential systems is proposed. In order to generate grid multi-wing attractors, we extend the method of constructing heteroclinic loops from classical differential equations to fractional-order differential equations. Firstly, two basic fractional-order linear systems are obtained by linearization at two symmetric equilibrium points of the fractional-order Rucklidge system. Then a heteroclinic loop is constructed and all equilibrium points of the two basic fractional-order linear systems are connected by saturation function switching control. Secondly, the theoretical methods of switching control and construction of heteromorphic rings of fractal-order two-wing and multi-wing chaotic attractors are studied. Finally, the feasibility of the proposed method is verified by numerical simulation.
1 Introduction
At present, chaotic dynamics is gradually transitioning from the basic theoretical research of mathematics and physics to the practical engineering application field. For example, chaotic theory has been greatly developed in the fields of memristor [1–6], secure communication [7–11], image encryption [12–17], neural network [18–29], so chaotic dynamics has a wide application prospect. A key factor in the application of chaos in engineering is to improve the complex dynamic characteristics of chaos. In recent years, many scholars have deeply analysed and studied the complex dynamic characteristics of chaos, and found many chaotic attractors with complex dynamics. Some research results show that chaotic systems with multi-wing or multi-scroll attractors can show richer and more complex dynamic characteristics [30–35].
Fractional calculus has a history of more than 300 years, but its applications in engineering and physics have only aroused interest in recent decades [36–38]. With the deepening of scientific research, some researchers were surprised to find that these systems have complex chaos and bifurcation phenomena when studying fractional-order nonlinear differential systems [39–45]. In [42], the author designed a method to eliminate chaos in the system trajectory through state feedback controller. In order to form multi-scroll attractors, the potential nonlinearity of fractional-order chaotic systems is changed. In [43], it is proved that the fractional-order system coupled by two fractional Lorentz systems can produce four-wing chaotic attractors. In [44], a series method of saturation function is proposed, which can enable fractional-order differential systems to generate multi-spiral chaotic attractors, including multi-scroll chaotic attractors in three directions. In [45], a suitable nonlinear state feedback controller is designed by employing the four construction criteria of the basic fractional-order differential nominal linear system to generate multi-wing chaotic attractors for the controlled fractional-order differential system. However, these multi-wing chaotic systems all contain product terms, which makes their circuit implementation complicated. In [46], Petras proposed a fractional-order Chua’s model based on memristor. Through digital simulation, it is found that the fractional-order Chua’s circuit can also produce two-scroll chaotic attractors. However, it is still a very challenging problem to find how to generate grid multi-wing attractors in fractal-order chaotic systems.
In this article, a new design method of generating grid multi-wing chaotic attractors from fractional-order differential system is proposed by switching control of saturation function and constructing heteroclinic loops. Because the fractional-order derivative is a nonlocal operator with weak singular kernel, the multi-wing attractors generated in fractional-order differential system are very different from the multi-wing attractors generated in the classical differential system. In addition, it can be seen from [47–52] that shil’nikov theorem can be used to construct two-wing and multi-wing chaotic attractors in classical differential systems. In this paper, the classical differential system construction method is extended to the fractional-order differential system construction method based on shil’nikov theorem [47]. Firstly, the heteroclinic loops are constructed from the fractional-order piecewise linear differential system, and then a method to generate various grid multi-wing attractors through switching control is proposed. Two basic fractional-order linear systems are constructed by linearization at two symmetrical equilibrium points of fractional-order Rucklidge system [53]. After switching the control, in order to connect all the equilibrium points of the two basic fractional-order linear systems [54], we design a heteroclinic loop. Under appropriate conditions, according to shil’nikov theorem, a variety of grid multi-wing attractors can be obtained. We use a predictor-corrector numerical simulation algorithm to confirm the effectiveness of the proposed method [55].
The other parts of this paper are organized as follows. In Section 2, we first introduce some preliminary knowledge about fractional-order differential systems. Two fundamental fractional differential linear systems are deduced from Rucklidge system in Section 3. In Section 4, we study the theoretical method of designing fractional-order two-wing and multi-wing chaotic attractors by switching control and constructing heteroclinic loops. Finally, the conclusions of this paper are given in Section 5.
2 Fractional-Order Differential System
Unlike ordinary differential equations, due to the lack of appropriate mathematical methods, the research on the theoretical analysis and numerical solution of fractional-order calculation is still a difficult topic. In recent years, Caputo type fractional-order differential equations have aroused great interest. Under the promotion of Adams [56], we choose Caputo version of Adams prediction correction algorithm. Next, we will give a brief introduction to the fractional-order algorithm.
Fractional-order differential equation is generally expressed by the following formula:
When the initial values are chosen as
where
where
, and the predicted value
In which
3 Design of Two Fundamental Fractional-Order Linear Systems
Considering the fractional-order version of Rucklidge system, it can be expressed by the following formula:
where
In the same way, we linearize system (Eq. 5) at equilibrium point
Through the processing of the above method, systems (Eqs 6, 7) can be called basic fractional-order linear systems. Obviously, the only equilibrium point of systems Eqs 6, 7 is
According to the analysis in [56], the equilibrium points in systems Eqs 6, 7 are locally asymptotically stable. If a system has more memory, the system is usually more stable than those systems with less memory [57]. It can be seen from inequality (Eq. 8) that due to the large memory of fractional-order differential equation systems, they are more stable than integer order equation systems. Through analysis, we conclude that the unstable regions are shown in Figure 1. It can be seen from the figure that except for the unstable regions, other regions are stable regions.
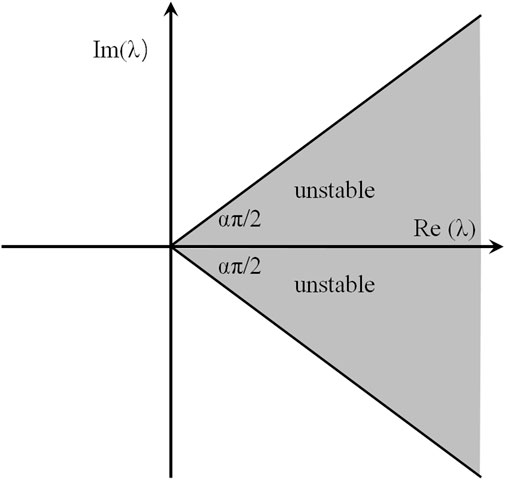
FIGURE 1. Stability region of fractional-order linear system when fractional-order is equal to
Through analysis and calculation, one-dimensional stable eigenline
Here
Here
4 Design of Two-Wing and Multi-Wing Chaotic Attractors
In this section, we construct heteroclinic loops, and then use the switching control method to design two-wing and multi-wing chaotic attractors in the two basic fractional-order linear systems introduced earlier. Based on the fundamental fractional linear systems Eqs 6, 7, extend the heteroclinic Shil’nikov theorem [47], we can design a switch controller and then connect the heteroclinic track of systems Eqs 6, 7 to make the track form a heteroclinic loop. Set the switching controller to
It should be noted here that according to Ref. [54], the existence condition of heteroclinic loop in system (Eq. 11) can determine the detailed mathematical expression of switching controller
Here,
If
From the transformation (x, y, z) →(−x,−y, z), it can be seen that there is invariance of the system, so the switching plane
Which indicates that
According to the above theoretical analysis, switch controller
The simulation of various fractional-order double-wing buttery chaotic attractor can be obtained when
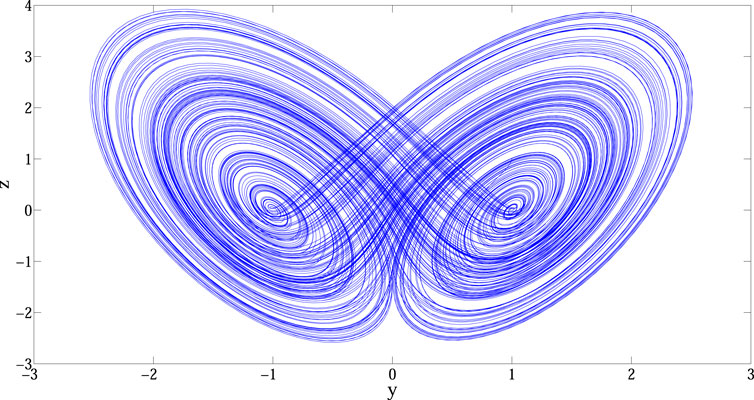
FIGURE 2. Double-wing buttery chaotic attractor of system (Eq. 12) When
where F(x, y, z) is the equilibrium switching controller, and
where
The prediction correction algorithm is used to solve the fractional-order differential system (Eq. 13), and the simulation results of the fractional-order 12-wing buttery chaotic attractor are obtained when
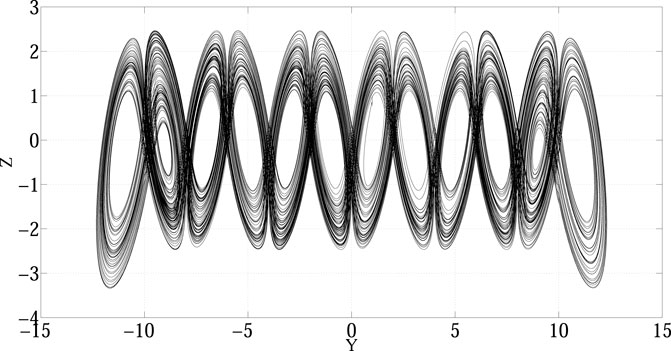
FIGURE 3. 12-wing chaotic attractor of system (Eq. 13) when
A grid multi-wing buttery chaotic attractor with a grid of 2 × 2 is obtained when
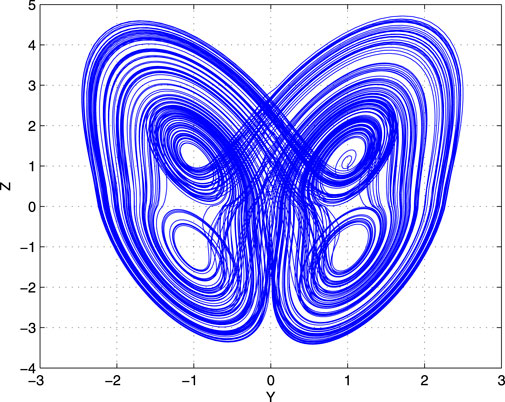
FIGURE 4. 2 × 2-wing chaotic attractor of system (Eq. 13) when
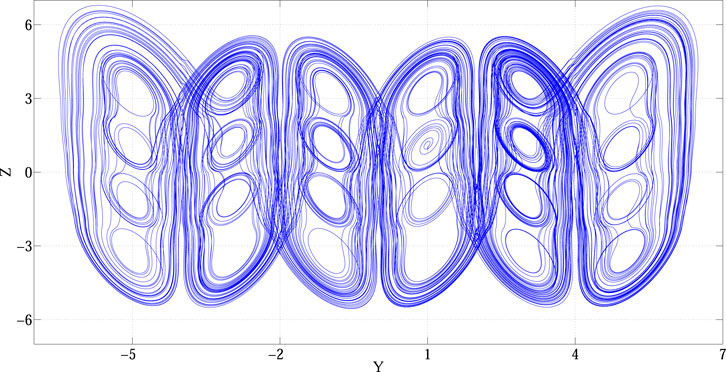
FIGURE 5. 6 × 4-wing chaotic attractor of system (Eq. 13) When
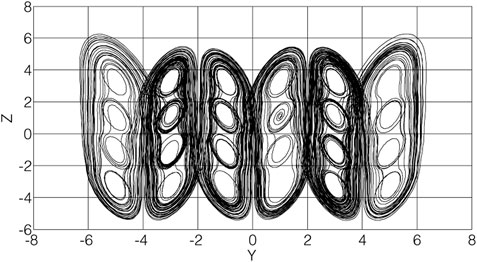
FIGURE 6. 6 × 4 -wing chaotic attractor of system (Eq. 13) When
From the above simulation results, it can be seen that if the appropriate parameters are set, when
5 Conclusion
In this paper, based on fractional-order linear differential system, a novel grid multi-wing chaotic attractor is proposed by switching saturation function control and constructing heteroclinic loops. Firstly, the two symmetric equilibrium points of the fractional Rucklidge system are linearized to obtain two basic fractional-order linear systems. Then all the equilibrium points of the two basic fractional-order linear systems are connected by a saturation function switching control and a heteroclinic loop. Finally, the effectiveness of the proposed design method is verified by numerical simulation. Since the proposed fractional-order chaotic system can generate multi-wing chaotic attractors with complex dynamic characteristics, however, it does not contain product terms and is easy to implement in circuits, so the chaotic system proposed in this paper has abundant potential engineering applications. In the future, we will further design the circuit realization of the fractional-order multi-wing chaotic system.
Data Availability Statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author Contributions
YL, XZ, FY and YH contributed to conception and design of the study. JG and YH organized the database. YL and FY performed the statistical analysis. YL and FY wrote the first draft of the manuscript. YL, XZ, JG, and FY wrote sections of the manuscript. All authors contributed to manuscript revision, read, and approved the submitted version.
Funding
This work is supported by the Hunan Provincial Natural Science Foundation of China under Grant 2019JJ60034, and the Scientific Research Fund of Hunan Provincial Education Department under Grants 19A106, 19B131, 21B0345 and 20k306, and by the Industry University Research Innovation Fund of Chinese Universities—a new generation of information technology innovation project under Grant 2020ITA07029.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Yu F, Kong X, Chen H. A 6D Fractional-Order Memristive Hopfield Neural Network and its Application in Image Encryption. Front Phys (2022) 10:847385. doi:10.3389/fphy.2022.847385
2. Xu Q, Cheng S, Ju Z, Chen M, Wu H. Asymmetric Coexisting Bifurcations and Multi-Stability in an Asymmetric Memristive Diode-Bridge-Based Jerk Circuit. Chin J Phys (2021) 70:69–81. doi:10.1016/j.cjph.2020.11.007
3. Xu C, Wang C, Jiang J, Sun J, Lin H. Memristive Circuit Implementation of Context-dependent Emotional Learning Network and its Application in Multi-Task. IEEE Trans Comput.-Aided Des Integr Circuits Syst (2021) 1. doi:10.1109/TCAD.2021.3116463
4. Yao W, Wang C, Sun Y, Zhou C. Robust Multimode Function Synchronization of Memristive Neural Networks with Parameter Perturbations and Time-Varying Delays. IEEE Trans Syst Man Cybern: Syst (2022) 52(1):260–274. doi:10.1109/TSMC.2020.2997930
5. Wan Q, Yan Z, Li F, Liu J, Chen S. Multistable Dynamics in a Hopfield Neural Network Under Electromagnetic Radiation and Dual Bias Currents. Nonlinear Dyn (2022). doi:10.1007/s11071-022-07544-x
6. Ma M, Yang Y, Qiu Z, Peng Y, Sun Y, Li Z, et al. A Locally Active Discrete Memristor Model and its Application in a Hyperchaotic Map. Nonlinear Dyn (2022) 107:2935–49. doi:10.1007/s11071-021-07132-5
7. Yu F, Qian S, Chen X, Huang Y, Liu L, Shi C, et al. A New 4D Four-Wing Memristive Hyperchaotic System: Dynamical Analysis, Electronic Circuit Design, Shape Synchronization and Secure Communication. Int J Bifurcation Chaos (2020) 30(10):2050147. doi:10.1142/S0218127420501473
8. Zhou L, Tan F, Yu F. A Robust Synchronization-Based Chaotic Secure Communication Scheme with Double-Layered and Multiple Hybrid Networks. IEEE Syst J (2019) 14(2):2508–19. doi:10.1109/JSYST.2019.2927495
9. Yu F, Zhang Z, Liu L, Shen H, Huang Y, Shi C, et al. Secure Communication Scheme Based on a New 5D Multistable Four-Wing Memristive Hyperchaotic System with Disturbance Inputs. Complexity (2020) 2020, 5859273. doi:10.1155/2020/5859273
10. Li Y, Li Z, Ma M, Wang M. Generation of Grid Multi-Wing Chaotic Attractors and its Application in Video Secure Communication System. Multimed Tools Appl (2020) 79:29161–77. doi:10.1007/s11042-020-09448-7
11. Yu F, Liu L, He B, Huang Y, Shi C, Cai S, et al. Analysis and FPGA Realization of a Novel 5D Hyperchaotic Four-Wing Memristive System, Active Control Synchronization, and Secure Communication Application. Complexity (2019) 2019, 4047957. doi:10.1155/2019/4047957
12. Li X, Mou J, Banerjee S, Cao Y. An Optical Image Encryption Algorithm Based on Fractional-Order Laser Hyperchaotic System. Int J Bifurcation Chaos (2022) 32(03):2250035. doi:10.1142/s0218127422500353
13. Fei Y, Zhang Z, Shen H. FPGA Implementation and Image Encryption Application of a New PRNG Based on a Memristive Hopfield Neural Network with a Special Activation Gradient. Chin Phys B (2022) 31(2):020505. doi:10.1088/1674-1056/ac3cb2
14. Deng J, Zhou M, Wang C, Wang S, Xu C. Image Segmentation Encryption Algorithm with Chaotic Sequence Generation Participated by Cipher and Multi-Feedback Loops. Multimed Tools Appl (2021) 80:13821–40. doi:10.1007/s11042-020-10429-z
15. Gao X, Mou J, Xiong L, Sha Y, Yan H, Cao Y. A Fast and Efficient Multiple Images Encryption Based on Single-Channel Encryption and Chaotic System. Nonlinear Dyn (2022) 108:613–36. doi:10.1007/s11071-021-07192-7
16. Zeng J, Wang C. A Novel Hyperchaotic Image Encryption System Based on Particle Swarm Optimization Algorithm and Cellular Automata. Secur. Commun. Netw. (2021) 2021:6675565. doi:10.1155/2021/6675565
17. Gao X, Mou J, Banerjee S, Cao Y, Xiong L, Chen X. An Effective Multiple-Image Encryption Algorithm Based on 3D Cube and Hyperchaotic Map. J King Saud Univ - Computer Inf Sci (2022) 34:1535–51. doi:10.1016/j.jksuci.2022.01.017
18. Yu F, Liu L, Li K, Cai S. A Robust and Fixed-Time Zeroing Neural Dynamics for Computing Time-Variant Nonlinear Equation Using a Novel Nonlinear Activation Function. Neurocomputing (2019) 350:108–16. doi:10.1016/j.neucom.2019.03.053
19. Yang L, Wang C. Emotion Model Of Associative Memory Possessing Variable Learning Rates With Time Delay. Neurocomputing (2021) 460(14):117–125. doi:10.1016/j.neucom.2021.07.011
20. Xu C, Wang C, Sun Y, Hong Q, Deng Q, Chen H. Memristor-based Neural Network Circuit with Weighted Sum Simultaneous Perturbation Training and its Applications. Neurocomputing (2021) 462:581–90. doi:10.1016/j.neucom.2021.08.072
21. Lin H, Wang C, Deng Q, Xu C, Deng Z, Zhou C. Review on Chaotic Dynamics of Memristive Neuron and Neural Network. Nonlinear Dyn (2021) 106(1):959–73. doi:10.1007/s11071-021-06853-x
22. Xu Q, Ju Z, Ding S, Feng C, Chen M, Bao B. Electromagnetic Induction Effects on Electrical Activity within a Memristive Wilson Neuron Model. Cogn Neurodyn (2022). doi:10.1007/s11571-021-09764-0
23. Zhou C, Wang C, Sun Y, Yao W. Weighted Sum Synchronization of Memristive Coupled Neural Networks. Neurocomputing (2020) 403, 211–223. doi:10.1016/j.neucom.2020.04.087
24. Fei Y, Zhang Z, Shen H. Design and FPGA Implementation of a Pseudo-random Number Generator Based on a Hopfield Neural Network under Electromagnetic Radiation. Front Phys (2021) 9:690651. doi:10.3389/fphy.2021.690651
25. Yao W, Wang C, Sun Y, Zhou C, Lin H, et al. Synchronization of Inertial Memristive Neural Networks With Time-Varying Delays via Static or Dynamic Event-Triggered Control. Neurocomputing (2020) 404:367–80. doi:10.1016/j.neucom.2020.04.099
26. Xiong B, Yang K, Zhao J, Li K. Robust Dynamic Network Traffic Partitioning against Malicious Attacks. J Netw Computer Appl (2017) 87:20–31. doi:10.1016/j.jnca.2016.04.013
27. Yu F, Shen H, Zhang Z, Huang Y, Cai S, Du S. Dynamics Analysis, Hardware Implementation And Engineering Applications Of Novel Multi-Style Attractors In A Neural Network Under Electromagnetic Radiation. Chaos, Solitons & Fractals (2021) 152:111350. doi:10.1016/j.chaos.2021.111350
28. Yao W, Wang C, Cao J, Sun Y, Zhou C. Hybrid Multisynchronization of Coupled Multistable Memristive Neural Networks With Time Delays. Neurocomputing (2019) 363:281–94. doi:10.1016/j.neucom.2019.07.014
29. Long M, Zeng Y. Detecting Iris Liveness with Batch Normalized Convolutional Neural Network. CMC-Computers Mater Continua (2019) 58(2):493–504. doi:10.32604/cmc.2019.04378
30. Yu F, Shen H, Zhang Z, Huang Y, Cai S, Du S. A New Multi-Scroll Chua’s Circuit With Composite Hyperbolic Tangent-Cubic Nonlinearity: Complex Dynamics, Hardware Implementation and Image Encryption Application. Integration (2021) 81:71–83. doi:10.1016/j.vlsi.2021.05.011
31. Zhang X, Wang C. A Novel Multi-Attractor Period Multi-Scroll Chaotic Integrated Circuit Based on CMOS Wide Adjustable CCCII. IEEE Access (2019) 7(1):16336–50. doi:10.1109/access.2019.2894853
32. Yu F, Chen H, Kong X. Dynamic Analysis and Application in Medical Digital Image Watermarking of a New Multi-Scroll Neural Network with Quartic Nonlinear Memristor. Eur Phys J Plus (2022) 137:434. doi:10.1140/epjp/s13360-022-02652-4
33. Zhou L, Wang C, Zhou L. A Novel No-Equilibrium Hyperchaotic Multi-Wing System via Introducing Memristor. Int J Circ Theor Appl (2018) 46(1):84–98. doi:10.1002/cta.2339
34. Zhou L, Wang C, Zhou L. Generating Hyperchaotic Multi-wing Attractor in a 4D Memristive Circuit. Nonlinear Dyn (2016) 85(4):2653–63. doi:10.1007/s11071-016-2852-8
35. Cui L, Lu M, Ou Q, Duan H, Luo W. Analysis and Circuit Implementation of Fractional Order Multi-wing Hidden Attractors. Chaos, Solitons and Fractals (2020) 138:109894. doi:10.1016/j.chaos.2020.109894
38. Cafagna D, Grassi G. Bifurcation and Chaos in the Fractional-Order Chen System via a Time-Domain Approach. Int J Bifurcation Chaos (2008) 18:1845–63. doi:10.1142/s0218127408021415
39. Yang F, Mou J, Liu J. Characteristic Analysis of the Fractional-Order Hyperchaotic Complex System and its Image Encryption Application. Signal Process. (2020) 169:107373. doi:10.1016/j.sigpro.2019.107373
40. Xie W, Wang C, Lin H. A Fractional-Order Multistable Locally Active Memristor and its Chaotic System with Transient Transition, State Jump. Nonlinear Dyn (2021) 104:4523–41. doi:10.1007/s11071-021-06476-2
41. Deng W, Li C. Synchronization of Chaotic Fractional Chen System. J Phys Soc Jpn (2005) 74:1645–8. doi:10.1143/jpsj.74.1645
42. Ahmad WM. Generation and Control of Multi-Scroll Chaotic Attractors in Fractional Order Systems. Chaos, Solitons and Fractals (2005) 25:727–35. doi:10.1016/j.chaos.2004.11.073
43. Cafagna D, Grassi G. Fractional-order Chaos: a Novel Four-wing Attractor in Coupled Lorenz Systems. Int J Bifurcation Chaos (2009) 19:3329–38. doi:10.1142/s0218127409024785
44. Deng W, Lü J. Design of Multidirectional Multiscroll Chaotic Attractors Based on Fractional Differential Systems via Switching Control. Chaos (2006) 16:043120. doi:10.1063/1.2401061
45. Zhang C, Yu S. Generation of Multi-wing Chaotic Attractor in Fractional Order System. Chaos, Solitons and Fractals (2011) 44:845–50. doi:10.1016/j.chaos.2011.06.017
46. Petras I. Fractional-Order Memristor-Based Chua's Circuit. IEEE Trans Circuits Syst (2010) 57(12):975–9. doi:10.1109/tcsii.2010.2083150
47. Silva CP. Shil'nikov's Theorem-A Tutorial. IEEE Trans Circuits Syst (1993) 40:675–82. doi:10.1109/81.246142
48. Chua L, Komuro M, Matsumoto T. The Double Scroll Family. IEEE Trans Circuits Syst (1986) 33:1072–118. doi:10.1109/tcs.1986.1085869
49. Shilnikov LP. Chuas Circuit: Rigorous Results and Future Problems. IEEE Trans Circuits Syst Fundam Theor Appl (1993) 40:784–6. doi:10.1109/81.246153
50. Mees A, Chapman P. Homoclinic and Heteroclinic Orbits in the Double Scroll Attractor. IEEE Trans Circuits Syst (1987) 34:1115–20. doi:10.1109/tcs.1987.1086251
51. Li Z, Chen G, Halang WA. Homoclinic and Heteroclinic Orbits in a Modified Lorenz System. Inf Sci (2004) 165:235–45. doi:10.1016/j.ins.2003.06.005
52. Li G, Chen X. Constructing Piecewise Linear Chaotic System Based on the Heteroclinic Shil'nikov Theorem. Commun Nonlinear Sci Numer Simulation (2009) 14:194–203. doi:10.1016/j.cnsns.2007.07.007
53. Rucklidge AM. Chaos in Models of Double Convection. J Fluid Mech (1992) 237:209–29. doi:10.1017/s0022112092003392
54. Yu S, Lu J, Chen G, Yu X. Generating Grid Multiwing Chaotic Attractors by Constructing Heteroclinic Loops into Switching Systems. IEEE Trans Circuits Syst (2011) 58(5):314–8. doi:10.1109/tcsii.2011.2149090
55. Vanĕc̆ek A, C̆elikovský S. Control Systems: From Linear Analysis to Synthesis of Chaos. Englewood Cliffs, NJ: Prentice-Hall (1996):433–60.
56. Diethelm K, Ford NJ, Freed AD. A Predictor Corrector Approach for the Numerical Solution of Fractional Differential Equations. Nonlinear Dyn (2002) 29(1):3–22. doi:10.1023/a:1016592219341
57. Ahmed E, El-Sayed AMA, El-Saka HAA. Equilibrium Points, Stability and Numerical Solutions of Fractional-Order Predator-Prey and Rabies Models. J Math Anal Appl (2007) 325(1):542–53. doi:10.1016/j.jmaa.2006.01.087
Keywords: fractional differential system, saturated functions switching control, heteroclinic loops, grid multi-wing, chaotic attractors
Citation: Lin Y, Zhou X, Gong J, Yu F and Huang Y (2022) Design of Grid Multi-Wing Chaotic Attractors Based on Fractional-Order Differential Systems. Front. Phys. 10:927991. doi: 10.3389/fphy.2022.927991
Received: 25 April 2022; Accepted: 16 May 2022;
Published: 24 June 2022.
Edited by:
Jun Mou, Dalian Polytechnic University, ChinaReviewed by:
Ciyan Zheng, Guangdong Polytechnic Normal University, ChinaYunzhen Zhang, Xuchang University, China
Copyright © 2022 Lin, Zhou, Gong, Yu and Huang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yuan Lin, MTUzMTkwNjc1QHFxLmNvbQ==; Fei Yu, eXVmZWl5ZnlmQGNzdXN0LmVkdS5jbg==