 Su Yang
Su Yang Shaoxuan Chen
Shaoxuan Chen Wei Zhu
Wei Zhu P. G. Kevrekidis
P. G. Kevrekidis- 1Department of Mathematics and Statistics, University of Massachusetts Amherst, Amherst, MA, United States
- 2School of Mathematics, Georgia Institute of Technology, Atlanta, GA, United States
Introduction: The moment quantities associated with the nonlinear Schrödinger equation offer important insights into the evolution dynamics of such dispersive wave partial differential equation (PDE) models. The effective dynamics of the moment quantities are amenable to both analytical and numerical treatments.
Methods: In this paper, we present a data-driven approach associated with the “Sparse Identification of Nonlinear Dynamics” (SINDy) to capture the evolution behaviors of such moment quantities numerically.
Results and Discussion: Our method is applied first to some well-known closed systems of ordinary differential equations (ODEs) which describe the evolution dynamics of relevant moment quantities. Our examples are, progressively, of increasing complexity and our findings explore different choices within the SINDy library. We also consider the potential discovery of coordinate transformations that lead to moment system closure. Finally, we extend considerations to settings where a closed analytical form of the moment dynamics is not available.
1 Introduction and motivation
The study of Nonlinear Schrödinger (NLS) type models (Sulem and Sulem, 1999; Ablowitz et al., 2004) is of wide interest and significance in a diverse array of physical modeling settings (Ablowitz and Clarkson, 1991; Ablowitz, 2011). Relevant areas of application extend from atomic physics (Pitaevskii and Stringari, 2003; Pethick and Smith, 2002; Kevrekidis et al., 2015) to fluid mechanical and hydrodynamic (notably ones stemming from deep water waves) problems (Ablowitz, 2011; Infeld and Rowlands, 2000) and from plasma physics (Kono and Skorić, 2010; Infeld and Rowlands, 2000) to nonlinear optics (Kivshar and Agrawal, 2003; Hasegawa and Kodama, 1995). Indeed, the relevant model is a prototypical envelope wave equation that describes the dynamics of dispersive waves. Specifically, in the context of nonlinear optics, it describes the envelope of the electric field of light in optical fibers (as well as waveguides), with the relevant measurable quantity being the light intensity
It is worthwhile to note that even to this day, the subject of NLS-type models continues to fascinate researchers and to constitute a fertile platform for a wide range of physical, mathematical and computational works; see, e.g., Karjanto (2024) for a recent review. At the same time, over the past few years, there has been an explosion of interest in data-driven methods, whereby machine-learning techniques are brought to bear towards understanding, codifying and deducing the fundamental quantities of physical systems. Arguably, a turning point in this effort was the development of the so-called physics-informed neural networks (PINNs) by Raissi et al. (2019) and of similar methodologies such as the extension of PINNs via the so-called DeepXDE Lu et al. (2021), as well as the parallel track of sparse identification of nonlinear systems, so-called SINDy by Brunton et al. (2016), which is central to the considerations herein. Additional methods include, but are not limited to, the sparse optimization of Schaeffer (2017), meta-learning of Feliu-Faba et al. (2020), as well as the neural operators of Li et al. (2021). A review of relevant model identification techniques can be found, e.g., in Karniadakis et al. (2021). Notice that a parallel track to the above one seeks not to discover the models, but rather key features thereof such as conserved quantities (Liu and Tegmark, 2021; 2022; Liu et al., 2022; Zhu et al., 2023) and its potential integrability (Krippendorf et al., 2021; De Koster and Wahls, 2024).
In the present setting, we seek to combine this important class of dispersive wave models within optical (and other physical) applications with some of the above machine-learning toolboxes. Our aim is not to discover the full PDE, or its conservation laws/integrability as in some of the above works. Rather, our aim is to leverage the theoretical understanding that exists at the level of reduced-order ODEs in the form of moment methods (Pérez-García et al., 2007; García-Ripoll and Pérez-García, 1999). Indeed, it is well-known from these works that upon defining suitable moment quantities, one can obtain closed form ODE dynamical systems of a few degrees-of-freedom, often just two (lending themselves to dynamical systems analysis) or sometimes involving a few more but still offering valuable low-dimensional analytical insights on the evolution of the center of mass, variance, kurtosis etc. of the relevant distribution. It is those effective ODEs (that stem from the original PDE via the moments) that we aim to retrieve using the data-driven approach developed herein. It is also relevant to mention in passing here that the moment methods were also used successfully to other models such as Fisher-KPP equations, considering also applications to the dynamics, e.g., of brain tumors (Belmonte-Beitia et al., 2014). Our approach and presentation will be structured hereafter as follows. In section 2, we will present a “refresher” from a theoretical perspective of the method of moments, essentially revisiting some basic results from the work of Pérez-García et al. (2007); García-Ripoll and Pérez-García (1999). Then, in Section 3, we will give a brief overview of SINDy type methods and the types of choices (such as, e.g., of model libraries) that they necessitate. Additionally, we will introduce a data-driven approach for learning coordinate transformations to close moment systems when the initially chosen moments are not closed. Then, in Section 4, we present a palette of numerical results and their effective moment identification. Our narrative contains a gradation of examples from simpler ones (where, e.g., an analytical low-dimensional closure of moments may exist) to gradually more complex ones, where a closure may exist after a coordinate transformation and eventually to cases where a closed system does not exist at the moment level to the best of our knowledge. Our aim is to showcase not only the successes, but also the challenges that the method may encounter in cases where we do not know of a closure or when we may not rightfully choose the library of functions (even when a closure may exist). We hope that this will provide a more informed/balanced viewpoint to the reader about what these methods may (and what they may not) be expected to provide.
2 Moment equation theoretical background
To contextualize our perspective, we will focus on the following specific case of the (1 + 1)-dimensional nonlinear Schrödinger (NLS) equation with a harmonic potential,
where
2.1 The method of moments
Instead of fully characterizing the solution of the Cauchy problem of Equation 1, the method of moments (Pérez-García et al., 2007), seeks to provide qualitative description of the solution behavior by studying the evolution of several integral quantities, i.e., the moments, of the solution
where
The method of moments aims to extract qualitative information about the solution
Example 1. The moments
This indicates that the evolution of the center of mass
Example 2. If
Example 3. Assume the nonlinearity
While the examples and conditions under which the method of moments leads to closed equations are well-known, deriving such analytical closure systems requires knowledge of the underlying PDE system, Equation 1 and detailed calculations therewith. This work explores data-driven methods for obtaining analytical or approximate moment closure systems based on empirical observations or simulations of the NLS equation, rather than relying solely on such analytical understanding and derivations. Importantly, the reconstruction of these ODE models can, in principle, take place even for settings where the underlying PDE model is unavailable/has not been specified. Given “experimental” data for the field, one may aspire to utilize the toolboxes presented below in order to obtain these effective, reduced dynamical equations.
For systems with existing analytical closures of the moment equations, such as Examples 1–3, our method seeks to rediscover the moment evolution equations and potentially the necessary coordinate transformations, such as
3 Data-driven methods
We present two computational methodologies for finding analytical or approximate closures for moment equations.
3.1 Sparse Identification of Nonlinear Dynamics
Our first method leverages Sparse Identification of Nonlinear Dynamics (SINDy) by Brunton et al. (2016), a data-driven approach for discovering governing ODEs from simulated or observational data. Consider a nonlinear ODE system of the form:
where
The key assumption is that
with
where each sparse column
To determine this sparse
where
Evaluating Equations 8, 9 at all times
Sparse regression techniques, such as LASSO (Tibshirani, 1996) or sequential thresholded least-squares (Brunton et al., 2016), can then solve the overdetermined system (Equation 11) for the sparse
While SINDy can be directly applied to Examples 1–3 to discover closed moment systems based on simulated PDE data (Equation 1), our specific interest lies in the following:
1. Given time series data of moments with a known closed moment system (e.g., Examples (1) and (2)), can we robustly discover the governing dynamics using a correct but potentially oversized dictionary
2. If a system is not closed for a chosen set of moments, but closure exists after a proper coordinate transformation (e.g., selecting
3. For more general systems where analytical closure does not exist, can data-driven methods provide a “good enough” numerical approximation to predict the future evolution of the moment system, effectively serving as a principled reduced-order description of the underlying PDE?
These questions will be addressed in Section 4. Of particular interest is the second point, where we demonstrate that, in certain cases, we can gain insight into the appropriate transformation to close the system, even if the moment system is not closed under the originally selected variables. In the following section, we discuss a more principled strategy to discover such transformations in a data-driven fashion.
3.2 Data-driven discovery of coordinate transformations for moment system closure
To illustrate the idea, we focus on Example 3, where the initially selected moments are
Remark 1. Note that the transformation matrix
Assume we aim to discover
We can then solve for
where
In addition,
The idea behind Equation 12 is very simple: we search for the transformation matrix
Remark 2. When the weight
To solve Equation 12, we use alternating optimization, iteratively optimizing
Algorithm 1.
4 Numerical results
In this section, we present numerical results on data-driven closure of moment systems (Examples 1–3) using the methodologies described in Section 3. To obtain the data, we first numerically solve the PDE Equation 1 with periodic boundary conditions and various ICs using an extended 4th-order Runge-Kutta method, the exponential integrator (ETDRK4) (see (Kassam and Trefethen, 2005) for a detailed explanation). The time series of the moments is subsequently extracted by numerical spatial integration according to Equations 2–5, with spatial derivatives computed using pseudo-spectral Fourier methods. We note once again that should the numerical data be replaced by “experimental” ones from a given physical process, the procedure can still be applied. Unless otherwise noted, the time series are evaluated at
4.1 Examples with analytical moment closure
We first examine Examples (1) and (2), where analytical (linear) closure exists for the chosen moments
4.2 Example 1
Let the selected moments be
We apply SINDy to this system using monomial libraries of degree up to
To address the overfitting issue, we can enlarge the dataset by concatenating the data matrices
where the coefficients are rounded to three decimal places. This suggests the potential usefulness of concatenating different time series, especially in cases where one may not be familiar with the order of the relevant closure.
4.3 Example 2
For Example 2 with the selected moments
4.4 Examples where closure exists after coordinate transformations
We now turn to Example 3, where the selected moments are
We consider the following questions:
We note that normalized moment time series are used as input for SINDy, as a way of incorporating feature scaling. This is an important aspect that ensures that all the relevant quantities are considered on “equal footing,” when the sparse regression step takes place.
4.5 SINDy with linear library
We begin by applying SINDy with a linear library
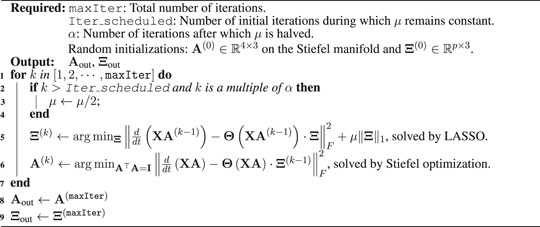
The coefficients are rounded to three decimal places. The first four panels of Figure 1 compare the “ground-truth” time-evolution data of
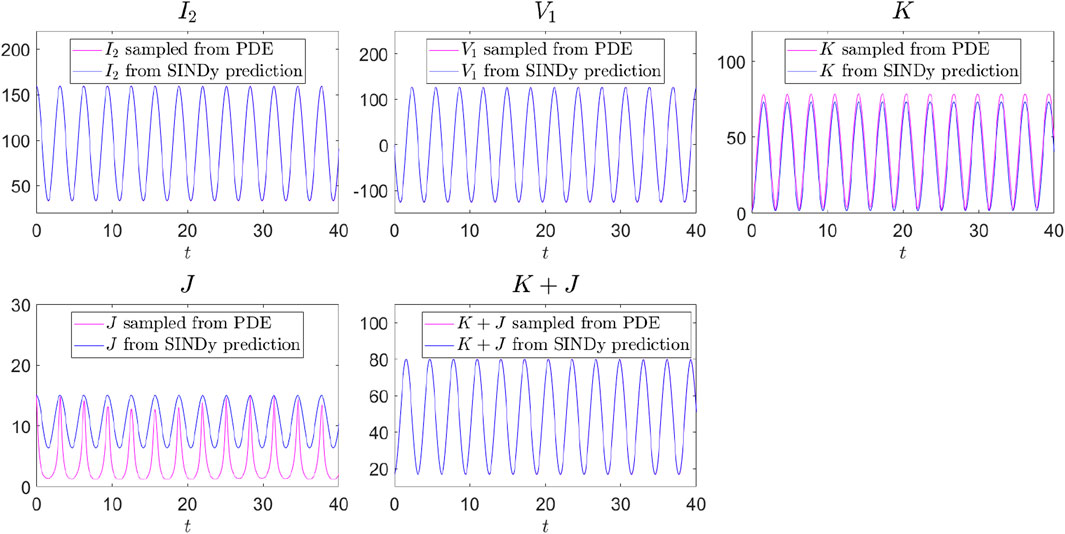
Figure 1. Comparison of the ground-truth and SINDy-predicted time evolutions of
Nevertheless, interestingly, if we add the ODE for
Equation 18 closely matches the ground-truth moment system Equation 7. The last panel of Figure 1 shows that the predicted time evolution of
4.6 SINDy with quadratic library
Next, we investigate the performance of SINDy with an expanded quadratic library
As before, if we add the predicted dynamics of
Unlike the previous case with
Figure 2 compares the ground-truth time evolutions of
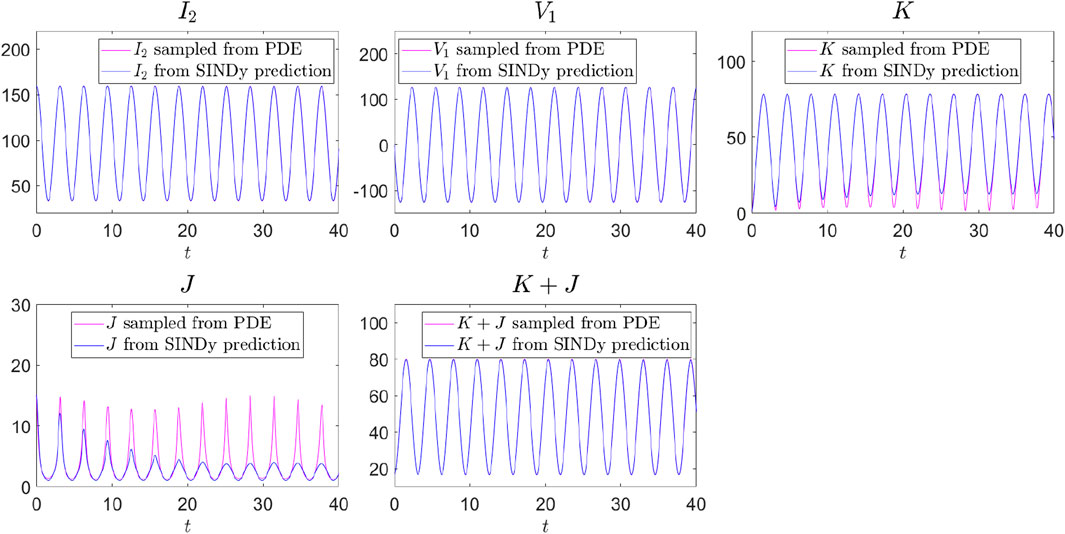
Figure 2. Comparison of the ground-truth and SINDy-predicted time evolutions of
Here, we see a key complication within SINDy that has been also present in works such as (Champion et al., 2019) and especially (Bakarji et al., 2022), namely the methodology is likely to result in ODE models that are proximal to the theoretically expected ones, but not identical to them. This, in turn, may result in a nontrivial error outside of the training set. Especially when the library at hand is “richer” than the terms expected to be present, unfortunately, it does not generically seem that the reduced, theoretically expected model will be discovered. Rather, our results suggest that it is possible that the additional “wealth” of the libraries used can be leveraged to approximate the data via different (nonlinear) dependent variable combinations.
As an even more problematic example, applying SINDy with a quadratic library to the moment time series generated from another IC Equation 16 results in a predicted ODE system that not only fails to match the ground truth, even after the theoretically suggested coordinate transformation
4.7 Stiefel optimization for discovering coordinate transformations
Next, we test the methodology from Section 3.2 to discover the coordinate transformation needed to close the moment system.
Case 1:
The coefficients are rounded to three decimal places. On the other hand, the “ground-truth” coordinate transformation
At first glance, the predicted solution Equation 21 appears different from the ground truth in Equation 22. However, after a further change of coordinates using
we have
Hence, according to Remark 2,
Case 2:
Similarly, after a further change of coordinates using:
we again have
Note that the result
4.8 An example of unclosed moment system
Finally, we present a case without analytical closure. Our “data-driven closure” aims to provide an accurate, reduced-order description of the PDE by approximating the evolution of the moment systems. In principle, this is the type of problem that we are aiming for, namely the discovery of potential moment closures when these may not be analytically available; the examples presented previously are valuable benchmarks to raise the complications that may emerge when one seeks to use this type of methodology in systems where the answer may be unknown and what credibility one may wish to assign to the obtained results.
Specifically, we consider an NLS Equation 1 with a time-dependent nonlinearity:
Notice that such time-dependent nonlinearities are well-known for some time in atomic physics settings (Donley et al., 2001; Staliunas et al., 2002) (and continue to yield novel insights to this day (Shagalov and Friedland, 2024)) and similar dynamical scenarios have been considered in nonlinear optics (Centurion et al., 2006; Zhang et al., 2021).
Moment systems with such nonlinearity will not close to the best of our knowledge, so we aim to numerically approximate form of the dynamics of the moments
Notably, the IC Equation 27 includes a quadratic phase, motivated by the quadratic phase approximation (QPA) ansatz for NLS equations discussed by (Pérez-García et al., 2007). It also includes regular, smooth localized initial conditions, as well as one involving Fourier mode oscillations, modulated by the Gaussian term. We expect the SINDy-predicted dynamics to vary with the different ICs of Equations 25–27, hence the relevant choices.
Due to the periodic nature of the nonlinearity
Naturally, one can observe that these are inspired by the nature of
We then apply SINDy with a linear library
To test the accuracy of the predicted moment systems, we integrate the SINDy-predicted ODEs into the future, up to
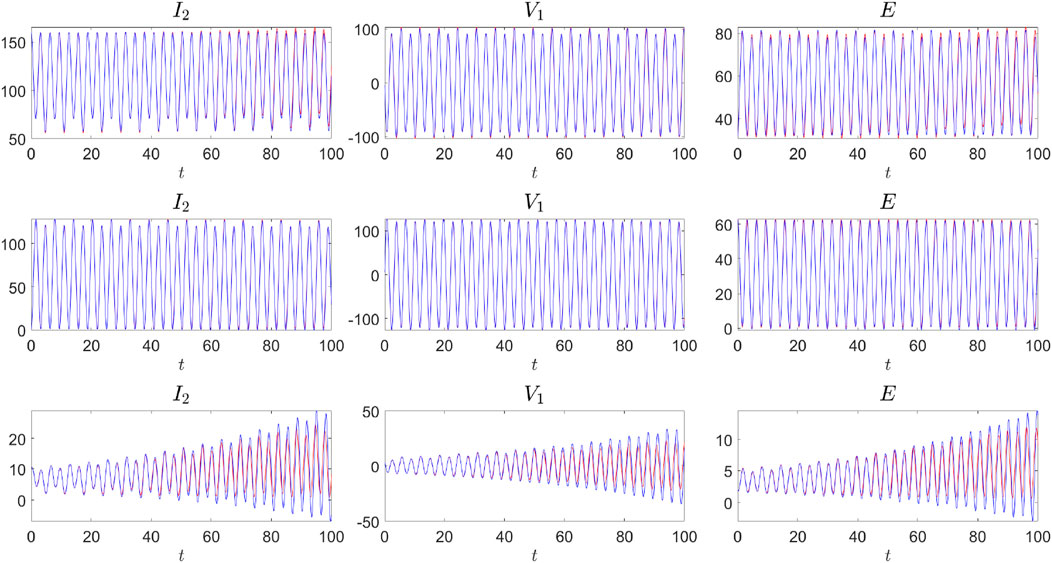
Figure 3. Comparison between the ground-truth time evolution (in red) and the SINDy-predicted evolution (in blue). Training data were obtained by integrating the NLS equation up to
5 Conclusion and future directions
This study explores a data-driven approach to identifying moment equations in nonlinear Schrödinger models. This paves the way more generally towards the use of similar methods in nonlinear PDEs which may feature similar wave phenomena. We applied the relevant sparse regression/optimization methodology aiming to rediscover known analytical closures (progressively extending considerations to more complex settings), addressed overfitting by augmenting datasets with multiple initial conditions, and identified suitable coordinate transformations for systems requiring them so as to bring forth the reduced or analytically tractable form of the dynamics. Additionally, we demonstrated that our approach could provide a reduced-order description of systems without analytical closures by approximating the evolution of the moment systems. Our findings show that this data-driven method can capture complex dynamics in NLS models and offer insights for various physical applications, possibly well past the training time used for the data-driven methods.
Future work will focus on extending our method to more complex PDEs and exploring its applicability to other types of nonlinear dynamical high-dimensional models, such as, e.g., the ones we mentioned in the context Fisher-KPP models and their applications to brain tumor dynamics, as analyzed, e.g., in (Belmonte-Beitia et al., 2014). Another possible avenue is to, instead of recovering the moment systems through numerical differentiation of the moment time series (as done in SINDy), leverage numerical integration into future time of a suitably augmented system. This approach, similar to Neural ODEs (Chen et al., 2018) and shooting methods, can help avoid producing predicted ODEs that blow up in finite time which SINDy may produce (see details in Section 4.2.2 and the Supplementary Material). Additionally, we plan to develop techniques to identify nonlinear coordinate transformations that can close the moment system, further enhancing the applicability of our method. Lastly, one can envision such classes of techniques for obtaining additional reduced features of solitary waves, such as data-driven variants of the variational approximation (Malomed, 2002), or data-driven models of soliton interaction dynamics (Manton, 1979; Kevrekidis et al., 2004; Ma et al., 2016).
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author contributions
SY: Formal Analysis, Investigation, Methodology, Software, Writing–original draft. SC: Formal Analysis, Investigation, Methodology, Software, Writing–original draft. WZ: Conceptualization, Funding acquisition, Methodology, Writing–review and editing. PK: Conceptualization, Funding acquisition, Methodology, Supervision, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This material is based upon work supported by the U.S. National Science Foundation under the awards PHY-2110030 and DMS-2204702 (PGK), as well as DMS-2052525, DMS-2140982, and DMS2244976 (WZ).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fphot.2024.1444993/full#supplementary-material
References
Ablowitz, M. (2011). Nonlinear dispersive waves, asymptotic analysis and solitons. Cambridge: Cambridge University Press. doi:10.1017/cbo9780511998324
Ablowitz, M., and Clarkson, P. (1991). “Solitons, nonlinear evolution equations, and inverse scattering,” in 149 of London math. Soc. Lecture note series. Cambridge: Cambridge U. Press.
Ablowitz, M., Prinari, B., and Trubatch, A. (2004). Discrete and continuous nonlinear schrödinger systems. Cambridge: Cambridge University Press.
Absil, P.-A., Mahony, R., and Sepulchre, R. (2008). Optimization algorithms on matrix manifolds. Princeton University Press.
Bakarji, J., Champion, K. P., Kutz, J. N., and Brunton, S. L. (2022). Discovering governing equations from partial measurements with deep delay autoencoders. CoRR abs/2201, 05136. doi:10.1098/rspa.2023.0422
Belmonte-Beitia, J., Calvo, G. F., and Pérez-García, V. M. (2014). Effective particle methods for Fisher–Kolmogorov equations: theory and applications to brain tumor dynamics. Commun. Nonlinear Sci. Numer. Simul. 19, 3267–3283. doi:10.1016/j.cnsns.2014.02.004
Brunton, S. L., Proctor, J. L., and Kutz, J. N. (2016). Discovering governing equations from data by sparse identification of nonlinear dynamical systems, 3932–3937.
Centurion, M., Porter, M. A., Kevrekidis, P. G., and Psaltis, D. (2006). Nonlinearity management in optics: experiment, theory, and simulation. Phys. Rev. Lett. 97, 033903. doi:10.1103/PhysRevLett.97.033903
Champion, K., Lusch, B., Kutz, J. N., and Brunton, S. L. (2019). Data-driven discovery of coordinates and governing equations. Proc. Natl. Acad. Sci. 116, 22445–22451. doi:10.1073/pnas.1906995116
Chen, R. T., Rubanova, Y., Bettencourt, J., and Duvenaud, D. K. (2018). Neural ordinary differential equations. Adv. neural Inf. Process. Syst. 31. doi:10.48550/arXiv.1806.07366
De Koster, P., and Wahls, S. (2024). Data-driven identification of the spectral operator in AKNS Lax pairs using conserved quantities. Wave Motion 127, 103273. doi:10.1016/j.wavemoti.2024.103273
Donley, E. A., Claussen, N. R., Cornish, S. L., Roberts, J. L., Cornell, E. A., and Wieman, C. E. (2001). Dynamics of collapsing and exploding Bose–Einstein condensates. Nature 412, 295–299. doi:10.1038/35085500
Edelman, A., Arias, T. A., and Smith, S. T. (1998). The geometry of algorithms with orthogonality constraints. SIAM J. Matrix Analysis Appl. 20, 303–353. doi:10.1137/s0895479895290954
Feliu-Faba, J., Fan, Y., and Ying, L. (2020). Meta-learning pseudo-differential operators with deep neural networks. J. Comput. Phys. 408, 109309. doi:10.1016/j.jcp.2020.109309
García-Ripoll, J., and Pérez-García, V. (1999). The moment method in general nonlinear Schrödinger equations
Infeld, E., and Rowlands, G. (2000). Nonlinear waves, solitons and chaos. Cambridge: Cambridge University Press.
Karjanto, N. (2024). Modeling wave packet dynamics and exploring applications: a comprehensive guide to the nonlinear Schrödinger equation. Mathematics 12, 744. doi:10.3390/math12050744
Karniadakis, G., Kevrekidis, I., Lu, L., Perdikaris, P., Wang, S., and Yang, L. (2021). Physics-informed machine learning. Nat. Rev. Phys. 3, 422–440. doi:10.1038/s42254-021-00314-5
Kassam, A.-K., and Trefethen, L. N. (2005). Fourth-order time-stepping for stiff PDEs. SIAM J. Sci. Comput. 26, 1214–1233. doi:10.1137/s1064827502410633
Kevrekidis, P. G., Frantzeskakis, D. J., and Carretero-González, R. (2015). The defocusing nonlinear schrödinger equation. Philadelphia: SIAM.
Kevrekidis, P. G., Khare, A., and Saxena, A. (2004). Solitary wave interactions in dispersive equations using Manton’s approach. Phys. Rev. E 70, 057603. doi:10.1103/PhysRevE.70.057603
Kivshar, Y. S., and Agrawal, G. P. (2003). Optical solitons: from fibers to photonic crystals. Academic Press. doi:10.1016/B978-0-12-410590-4.X5000-1
Krippendorf, S., Lüst, D., and Syvaeri, M. (2021). Integrability ex machina. Fortschritte Phys. 69, 2100057. doi:10.1002/prop.202100057
Li, Z., Kovachki, N., Azizzadenesheli, K., Liu, B., Bhattacharya, K., Stuart, A., et al. (2021). “Fourier neural operator for parametric partial differential equations,” in International Conference on Learning Representations.
Liu, X., Xiao, N., and Xiang Yuan, Y. (2021). A penalty-free infeasible approach for a class of nonsmooth optimization problems over the Stiefel manifold. J. Sci. Comput. 99, 30. doi:10.1007/s10915-024-02495-4
Liu, Z., Madhavan, V., and Tegmark, M. (2022). Machine learning conservation laws from differential equations. Phys. Rev. E 106, 045307. doi:10.1103/physreve.106.045307
Liu, Z., and Tegmark, M. (2021). Machine learning conservation laws from trajectories. Phys. Rev. Lett. 126, 180604. doi:10.1103/PhysRevLett.126.180604
Liu, Z., and Tegmark, M. (2022). Machine learning hidden symmetries. Phys. Rev. Lett. 128, 180201. doi:10.1103/PhysRevLett.128.180201
Lu, L., Meng, X., Mao, Z., and Karniadakis, G. (2021). DeepXDE: a deep learning library for solving differential equations. SIAM Rev. 63, 208–228. doi:10.1137/19m1274067
Ma, M., Navarro, R., and Carretero-González, R. (2016). Solitons riding on solitons and the quantum Newton’s cradle. Phys. Rev. E 93, 022202. doi:10.1103/PhysRevE.93.022202
Malomed, B. A. (2002). Progress in optics (Elsevier). Var. methods nonlinear fiber Opt. Relat. fields 43, 69–191. doi:10.1016/S0079-6638(02)80026-9
Manton, N. (1979). An effective Lagrangian for solitons. Nucl. Phys. B 150, 397–412. doi:10.1016/0550-3213(79)90309-2
Oviedo, H., and Dalmau, O. (2019). “A scaled gradient projection method for minimization over the Stiefel manifold,” in Advances in soft computing. Editors L. Martínez-Villaseñor, I. Batyrshin, and A. Marín-Hernández (Cham: Springer International Publishing), 239–250.
Pérez-García, V., Torres, P., and Montesinos, G. (2007). The method of moments for nonlinear Schrödinger equations: theory and applications. SIAM J. Appl. Math. 67, 990–1015. doi:10.1137/050643131
Pethick, C. J., and Smith, H. (2002). Bose–einstein condensation in Dilute Gases. Cambridge, United Kingdom: Cambridge University Press.
Pitaevskii, L., and Stringari, S. (2003). Bose-Einstein condensation. Oxford: Oxford University Press.
Raissi, M., Perdikaris, P., and Karniadakis, G. E. (2019). Physics-informed neural networks: a deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 378, 686–707. doi:10.1016/j.jcp.2018.10.045
Schaeffer, H. (2017). Learning partial differential equations via data discovery and sparse optimization. Proc. R. Soc. A Math. Phys. Eng. Sci. 473, 20160446. doi:10.1098/rspa.2016.0446
Shagalov, A. G., and Friedland, L. (2024). Autoresonant generation of solitons in Bose-Einstein condensates by modulation of the interaction strength. Phys. Rev. E 109, 014201. doi:10.1103/PhysRevE.109.014201
Staliunas, K., Longhi, S., and de Valcárcel, G. J. (2002). Faraday patterns in Bose-Einstein condensates. Phys. Rev. Lett. 89, 210406. doi:10.1103/PhysRevLett.89.210406
Sulem, C., and Sulem, P. (1999). The nonlinear Schrödinger equation: self-focusing and wave collapse. New York: Springer.
Tibshirani, R. (1996). Regression shrinkage and selection via the lasso. J. R. Stat. Soc. Ser. B Stat. Methodol. 58, 267–288. doi:10.1111/j.2517-6161.1996.tb02080.x
Xiao, N., Liu, X., and Yuan, Y.-x. (2020). A class of smooth exact penalty function methods for optimization problems with orthogonality constraints. Optim. Methods Softw. 37, 1205–1241. doi:10.1080/10556788.2020.1852236
Zhang, S., Fu, Z., Zhu, B., Fan, G., Chen, Y., Wang, S., et al. (2021). Solitary beam propagation in periodic layered Kerr media enables high-efficiency pulse compression and mode self-cleaning. Light Sci. and Appl. 10, 53. doi:10.1038/s41377-021-00495-9
Keywords: NLS models, SINDy, data-driven methods, moment equations, reduced-order modeling
Citation: Yang S, Chen S, Zhu W and Kevrekidis PG (2024) Identification of moment equations via data-driven approaches in nonlinear Schrödinger models. Front. Photonics 5:1444993. doi: 10.3389/fphot.2024.1444993
Received: 06 June 2024; Accepted: 30 September 2024;
Published: 30 October 2024.
Edited by:
Georgios D. Barmparis, Foundation for Research and Technology Hellas, GreeceReviewed by:
Lifu Zhang, Shenzhen University, ChinaNatanael Karjanto, Sungkyunkwan University, Republic of Korea
Copyright © 2024 Yang, Chen, Zhu and Kevrekidis. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Su Yang, c3V5YW5nQHVtYXNzLmVkdQ==