 Haneen Alsuradi
Haneen Alsuradi Joseph Hong
Joseph Hong Helin Mazi1
Helin Mazi1 Mohamad Eid
Mohamad Eid- 1Engineering Division, New York University Abu Dhabi, Abu Dhabi, United Arab Emirates
- 2Center for Artificial Intelligence and Robotics, New York University Abu Dhabi, Abu Dhabi, United Arab Emirates
Wearable augmentations (WAs) designed for movement and manipulation, such as exoskeletons and supernumerary robotic limbs, are used to enhance the physical abilities of healthy individuals and substitute or restore lost functionality for impaired individuals. Non-invasive neuro-motor (NM) technologies, including electroencephalography (EEG) and sufrace electromyography (sEMG), promise direct and intuitive communication between the brain and the WA. After presenting a historical perspective, this review proposes a conceptual model for NM-controlled WAs, analyzes key design aspects, such as hardware design, mounting methods, control paradigms, and sensory feedback, that have direct implications on the user experience, and in the long term, on the embodiment of WAs. The literature is surveyed and categorized into three main areas: hand WAs, upper body WAs, and lower body WAs. The review concludes by highlighting the primary findings, challenges, and trends in NM-controlled WAs. This review motivates researchers and practitioners to further explore and evaluate the development of WAs, ensuring a better quality of life.
1 Introduction
Throughout history, humans have strived to enhance their physical and cognitive abilities through technological innovations. For example, the invention of vehicles allowed humans to overcome their natural speed limitation, while the emergence of the internet expanded our communication abilities. This practice of enhancing human capabilities through the application of technology falls under the field of human augmentation (Guerrero et al., 2022). Within this larger field, human movement augmentation (HMA) refers to the enhancement of sensorimotor capabilities, as opposed to cognitive ones, which can include improvement of strength, endurance, and mobility (Cinel et al., 2019). Given the physical nature of this mode of augmentation, implementations within HMA also share this physical characteristic.
HMA can be wearable, designed to provide support or enhancement while attached to the human body. Non-wearable augmentations, on the other hand, enhance human capabilities as standalone devices. Furthermore, the implementation of augmentation can be invasive, requiring medical interventions, or non-invasive, which requires alternative methods to integrate the augmentation with the user. Additionally, the augmentation can be controlled by various agents. An autonomous mode of control operates through an algorithm or model on the device's controller, occasionally accepting user preferences but not as a direct input, primarily relying on its own logic for decisions. A voluntary mode of control involves full user input, often through physiological (such as surface electromyography or electroencephalography) or non-physiological (such as a joystick or pedals) signals.
Given the plethora of implementation taxonomies within HMA, we focus on a specific subset of HMA implementations that have been gaining interest in the community: wearable augmentations (WAs) that are non-invasive and primarily controlled through a voluntary control mode via neurophysiological signals to infer user intent.
1.1 Wearable augmentations
WAs refer to a category of HMA devices designed to be physically attached to the human body with the purpose of assisting in performing a variety of physical tasks that would otherwise be impossible for an individual. WAs include both exoskeletons and supernumerary robotic limbs such as fingers, arms, or legs. Exoskeletons are typically designed to provide support to either upper or lower limbs for serving different purposes such as rehabilitation (Cao and Huang, 2020) or augmentation (Kazerooni, 2008). These exoskeletons are designed to fit the natural configuration of the human body, to be worn as external suits, and are equipped with actuators for the purpose of assisting human joints. For example, lower body exoskeletons are designed to aid in weight-bearing, reducing the metabolic cost of locomotion, and facilitating gait rehabilitation (Siviy et al., 2023). On the other hand, upper body exoskeletons are used in enhancing load lifting capabilities, increasing strength and endurance. As such, they often provide support to workers and laborers in the industrial sector, and are also beneficial for rehabilitation purposes (Ebrahimi, 2017).
Supernumerary robotic limbs, on other hand, are additional limbs that augment human capabilities in tasks involving manipulation and locomotion. These can work in conjunction with natural limbs, or operate independently by introducing additional degrees of freedom (DoFs). Some advantages of offering those supernumerary DoFs is the enlarged workspace, as well as the ability to perform sophisticated actions independently that would otherwise be impossible for a single human to perform. Supernumerary robotic legs, for instance, are primarily designed to extend walking abilities (Khazoom et al., 2020) or to offer enhanced stability while standing (Treers et al., 2017). In contrast, supernumerary robotic arms aim to help healthy individuals perform demanding tasks such as construction work (Parietti and Asada, 2014; Ciullo et al., 2019), surgical operations (Abdi et al., 2016), and aircraft fuselage assembly (Parietti and Asada, 2014). Furthermore, supernumerary robotic fingers have been significantly explored due to their ease of attachment and the limited DoFs required for their operation. Various supernumerary robotic fingers have been proposed to assist stroke patients with grasp compensation (Salvietti et al., 2016), offer rehabilitation for hemiparetic upper limbs (Hussain et al., 2017a), and enable healthy individuals in carrying out complex manipulation and grasping tasks (Kieliba et al., 2021).
One of the primary challenges in achieving widespread adoption of WAs is the complexity of their control paradigm. The difficulty arises from the additional overhead attention required by the brain in controlling the WA while maintaining a decent control over the natural limbs (Guggenheim et al., 2020). Conventional implementations of WAs relied on controlling them through joysticks (Nguyen et al., 2019), audio commands (Guo et al., 2022), eye gaze (Fan et al., 2020), sensing parameters related to natural limb's pose (Kojima et al., 2017) and position (Wu and Asada, 2018), or a combination of these (Nguyen et al., 2019). A recent and promising trend is to utilize non-invasive neuro-motor (NM) interfaces, which overcome several issues associated with the previously mentioned conventional methods due to their intuitiveness. This brings us to the importance and functionality of NM interfaces in controlling WAs.
1.2 Neuro-motor interfaces
NM interfaces utilize signals such as surface electromyography (sEMG) and electroencephalography (EEG). These interfaces can alleviate the constraint of using natural limbs to control WAs, as is the case when using joysticks.
Several works have demonstrated controlling WAs through sEMG signals. Typically, these utilize sEMG signals from body parts relevant to the desired motion, such as signals from the leg to control a lower body exoskeleton (Chen et al., 2023). On the other hand, EEG-controlled WAs are capable of recognizing user's motion intention through detecting particular cortical activities (Wu and Asada, 2018), in theory making the WA devices more intuitive to control and use. However, EEG-controlled WAs are less common due to the need of sophisticated algorithms to reliably and accurately interpret user intent.
The following subsections provide a background on EEG and sEMG signals. This includes their operational principles, key components of their setups, and the challenges associated with utilizing them as control signals.
1.2.1 Surface electromyography (sEMG)
Electromyography (EMG) is a method that records the electrical activity of muscle cells during contraction (Merletti and Farina, 2016). This activity involves small electrical currents produced by muscle fibers before generating force. These currents result from the exchange of ions across muscle fiber membranes, a crucial part of the muscle contraction signaling process (Day, 2002). sEMG is a non-invasive variant of EMG, where electrodes are placed on the surface of the skin above the muscle of interest. sEMG signals have frequencies lower than 400–500 Hz (Mäki and Ilmoniemi, 2011) and amplitudes in the low mV range (Day, 2002). Notable features of sEMG data exist in time, time-frequency, and frequency domains (Zecca et al., 2002; Rechy-Ramirez and Hu, 2011). Nevertheless, time domain features are the most commonly used for pattern recognition with machine interfaces and WAs in particular (Spiewak et al., 2018).
Generally, there are two primary applications of sEMG in the context of WAs control: sEMG-based motion recognition (Lee et al., 2023) and sEMG-based torque prediction (Lotti et al., 2020). sEMG signals are characterized by a higher signal to noise ratio (SNR) compared to EEG signals. However, for patients who exhibit low sEMG activity or significant muscle spasticity, sEMG-based WAs may not be suitable. In such cases, EEG-based WAs offer a viable alternative.
1.2.2 Electroencephalography (EEG)
EEG is a non-invasive method of capturing electrical cortical activity originating from the simultaneous postsynaptic potentials of neural populations (Cohen, 2017). Electrodes are placed on the scalp to capture the electrical activity associated with cortical brain activation. The amplitude of the measured EEG signals can vary from a few microvolts to several tens of microvolts, influenced by factors such as the individual's mental state, age, and scalp characteristics (Niedermeyer and da Silva, 2005). As EEG signals are small in amplitude, it becomes necessary to amplify those signals for two main reasons. The first is to improve SNR and thus better extract the actual brain signal (Nunez and Srinivasan, 2006). The second reason is to bring the signal to a level suitable for digitization and further processing (Luck, 2014). One notable aspect of EEG data is the neural rhythmic oscillations, where the EEG signals generally have frequencies <100 Hz (Mäki and Ilmoniemi, 2011). Oscillations are split into five main frequency bands: delta (1–4 Hz), theta (4–8 Hz), alpha (8–13 Hz), beta (13–30 Hz), and gamma (30–50 Hz) (Strijkstra et al., 2003). These oscillations are linked to various processes, including sensory, perceptual, cognitive, motor, and emotional functions (Siegel et al., 2012).
EEG data offer two primary types of signals for the control of EEG-based WAs: endogenous, which are voluntarily generated without external stimuli, and exogenous, which are elicited in response to external stimuli. Endogenous signals can be generated when users perform motor imagery (MI) (Pfurtscheller and Neuper, 2001), a process where an individual imagines a movement, leading to observable oscillations in the alpha band at the motor cortex, known as event-related desynchronization (ERD) (Schomer and Da Silva, 2012). Alternatively, endogenous signals can arise from the intention to move, manifesting as an ERD at the motor cortex, or as a movement-related cortical potentials (Wright et al., 2011) that are detectable as a low-frequency signal (Garipelli et al., 2013) at the motor cortex. Endogenous EEG signals provide an intuitive interface for controlling WAs, closely mimicking the way we naturally control our limbs. However, these interfaces often require more extensive training, and the communication bit rate tends to be lower compared to exogenous-based methods (Lee et al., 2017).
Exogenous signals, on the other hand, are evoked by an external stimulus, most commonly through visual cues. This method requires minimal training, and has higher bit rate, however, it occupies the visual modality which is generally needed for performing tasks, thus limiting its applicability. Examples of exogenous signals are steady state visually evoked potential (SSVEP) (Regan, 1966) and P300 (Polich, 2007).
1.3 Historical perspective
NM-controlled WAs are typically utilized by individuals who have all their limbs. Interestingly, the technology for these augmentations often originates from innovations aimed at restoring functions for those who have lost one or more limbs, such as prosthetic devices for amputees (Battye et al., 1955; Horn, 1972; Guger et al., 1999; Bitzer and Van Der Smagt, 2006; Ferris et al., 2006; Bai et al., 2015).
In fact, the field of prosthetics has historically paved the way for augmentation. Given the intertwined history and shared technologies of the two fields, we have charted a historical timeline highlighting key developments in wearables for both limb augmentation and replacement; see Figure 1. This timeline particularly emphasizes those controlled via sEMG or EEG. The inception of NM-controlled prostheses dates back to 1955 (Battye et al., 1955), when the first hand replacement prosthetic was controlled using sEMG. This innovation evolved to enable basic actions, like opening and closing a fist, using sEMG signals from the forearm. On the other hand, the emergence of EEG-controlled prostheses was not until 1999. That year marked the development of the first hand prosthesis controlled through MI of the right and left hands, specifically to open and close the fist (Guger et al., 1999). Subsequent to this, in 2001, a lower body exoskeleton controlled through four sEMG signals obtained from the thigh was proposed to facilitate the gait cycle of healthy individuals (Kawamoto and Sankai, 2001), marking the first WA controlled through sEMG. A decade later, 2012 witnessed the emergence of the first EEG-controlled WA in the form of a lower body exoskeleton that assisted in pivotal motions, such as transitioning from sitting to standing, with a specific focus on rehabilitation contexts (Noda et al., 2012). The most recent advancement involves augmenting hands with supernumerary robotic fingers controlled via NM interfaces; the first implementation was proposed in 2016 (Hussain et al., 2016b).
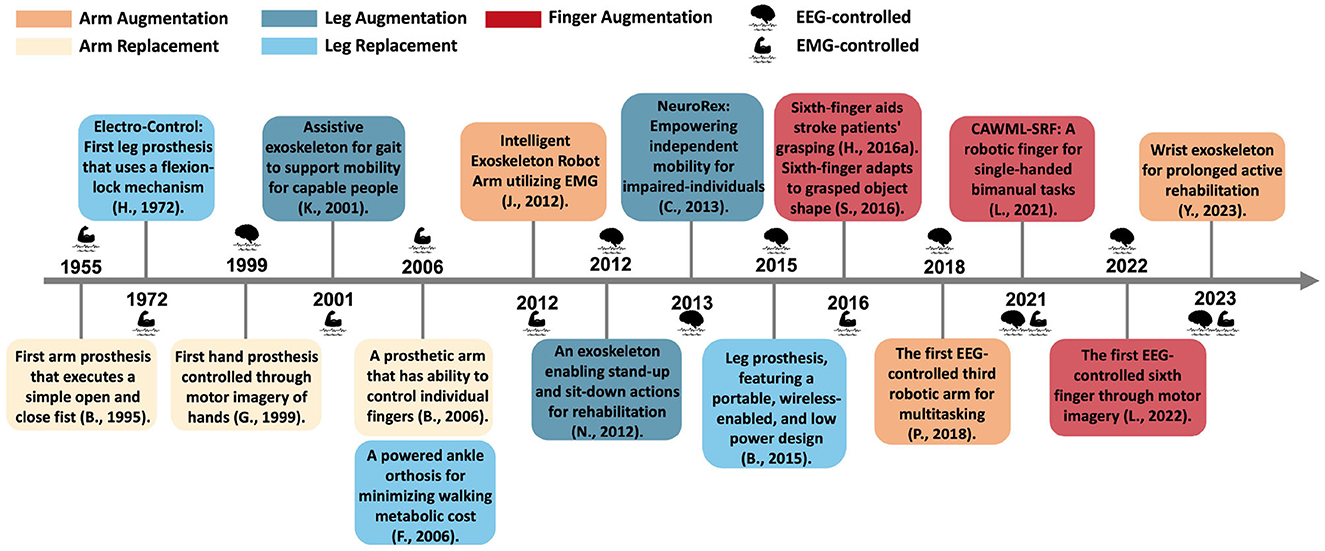
Figure 1. Historical timeline. Significant advancements in wearable technology, designed for either replacement or augmentation, controlled via neuro-motor interfaces, that occurred in the past few decades. Color coding correspond to the type of wearable device and the color-shade indicates whether it is intended for replacement or augmentation. Furthermore, the brain and muscle icons are used to indicate whether the wearable device is controlled through EEG or sEMG interface, respectively.
Motivated by the inherent intuitiveness of the NM control paradigm and the mounting enthusiasm from the research community, this article offers a comprehensive review of the literature on non-invasive, NM-controlled WAs. Previous reviews have focused on the principles of human movement augmentation and associated challenges (Eden et al., 2022), or on supernumerary robotic limbs, either from a device-driven perspective (Prattichizzo et al., 2021; Yang et al., 2021) or a problem-driven approach (Tong and Liu, 2021). Unlike prior works, our focus is on wearable devices for human augmentation, including supernumerary robotic limbs and exoskeletons controlled exclusively through NM interfaces (either EEG, sEMG, or both). One motivation for reviewing work on EEG/EMG-controlled WAs is our belief that the fusion of both technologies is very promising for achieving reliable augmentation due to the complementary behavior the two modalities could offer.
We conducted an initial literature search spanning the last twelve years using the following logical combinations of keywords: (EEG OR EMG OR electroencephalography OR electromyography) AND (exoskeleton OR supernumerary) AND (lower body OR upper body OR arm OR hand OR leg OR feet OR foot OR finger). This search was carried out through EBSCO title-abstract-keyword searches. As depicted in Figure 2, the results showcase a clear upward trend in the research work in this domain. Out of these papers, only the relevant ones discussing a physical WA device controlled through EEG, EMG, or both are considered for the segmental analysis. A few other older papers were also considered given their historical importance. Motivated by the inherent intuitiveness of the NM-control paradigm and the mounting enthusiasm from the research community, this article offers a comprehensive review of the literature on NM-controlled wearable robots designed for human augmentation, considering 54 papers in total. All data presented is up-to-date as of September 26th, 2024.
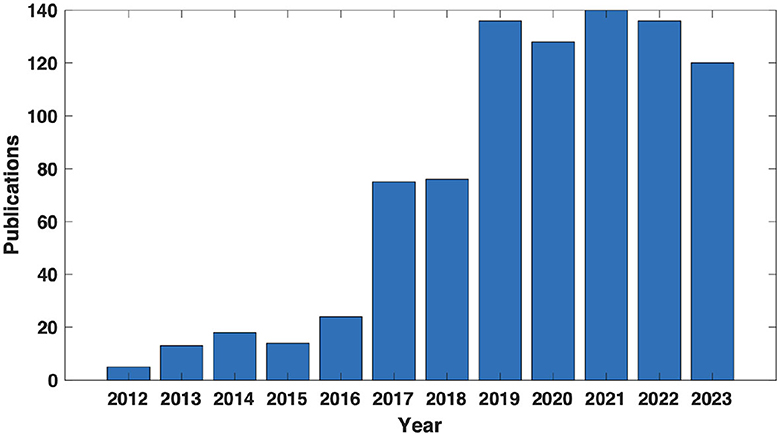
Figure 2. Trend. Annual number of published articles related to wearable augmentations controlled via EEG/EMG, according to the EBSCO database.
In Section 2, we discuss key concepts related to NM-controlled WAs, including a conceptual model for NM-controlled WAs and the main design considerations for creating functional and user-friendly devices. Additionally, we explore two vital concepts in NM-controlled WAs: the provision of sensory feedback and the neuroplasticity and embodiment associated with using NM-controlled WAs. Section 3 reviews studies that have utilized NM interfaces for WAs, covering supernumerary robotic limbs and exoskeletons from a segmental perspective. Finally, we address some pressing challenges in the field and present trends and future outlooks for NM-controlled WAs.
2 NM-controlled WAs: design and integration
2.1 Conceptual model
A conceptual model for an NM-controlled WA is depicted in Figure 3, illustrating a supernumerary finger as a representative example. However, this model is applicable to any WA. It assumes a hybrid control approach, utilizing both EEG and sEMG, although systems may alternatively be controlled solely by one modality. As mentioned earlier, hybrid NM-controlled WAs benefit from the combined features of both modalities. EEG data is used for predicting movement intent, given that EEG is a neural signal that can capture movement intention signals almost instantaneously (Liu et al., 2021), which allows for fast and seamless response. sEMG data, on the other hand, can be used in multiple ways. sEMG from a particular muscle could be a direct means of control to predict the amount of torque or force required (Lotti et al., 2020; Treussart et al., 2020). Another approach is using sEMG from body parts involved with the WA in the task performance, providing context for the WA. This would confine movement possibilities and adjust force or torque to match the collective kinematics of the natural body.
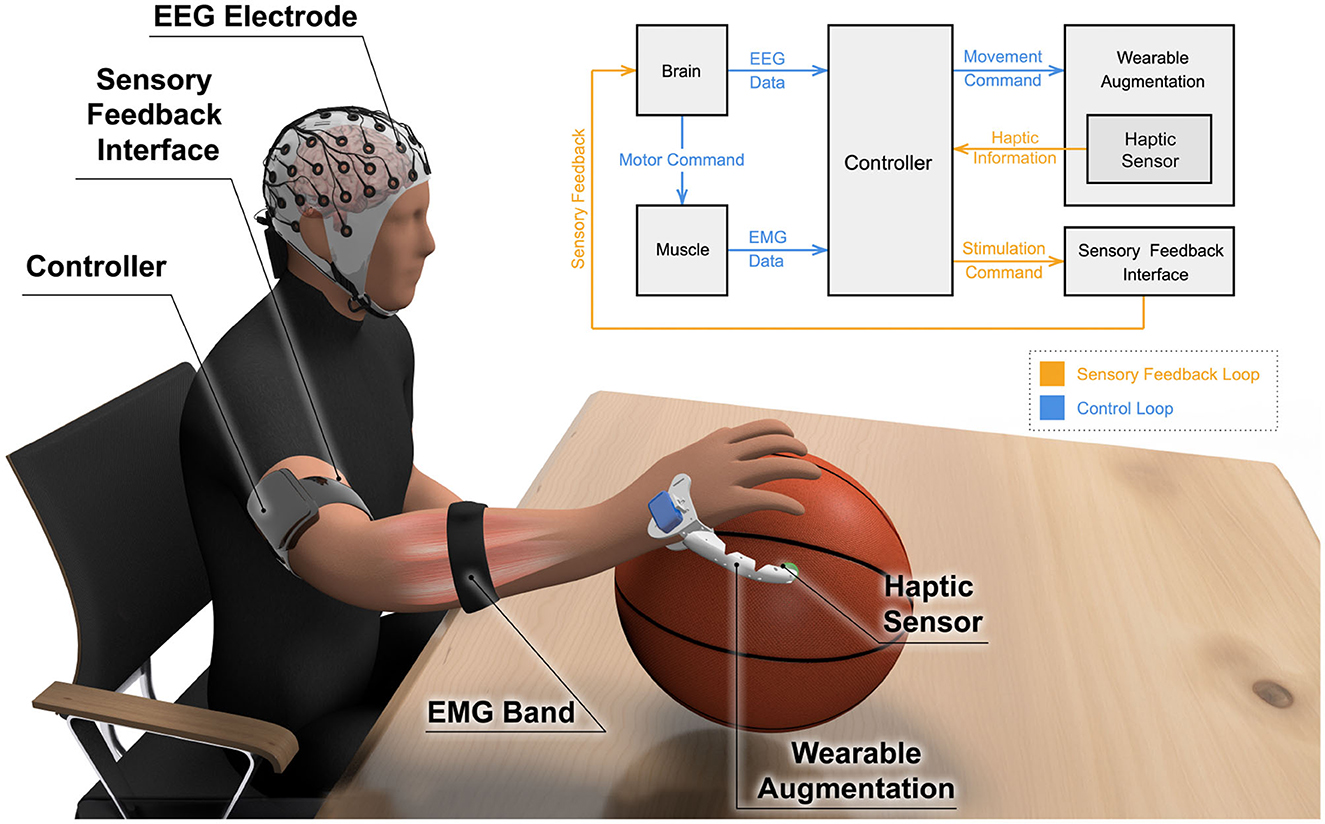
Figure 3. Conceptual model for an NM-controlled WA. This example features a hand WA with a control loop that includes EEG and sEMG to predict movement intent and required force, respectively. The model also includes a feedback loop that conveys sensory feedback to the user.
Accordingly, the conceptual model employs EEG and sEMG acquisition systems, where the data acquired from both modalities are transmitted to the WA controller, as illustrated in Figure 3. Haptic sensors attached to the WA, which could measure parameters like contact or grasping forces, transmit sensory data to the WA controller as well. This data is then translated and sent back to the user as either modality-matched or modality-mismatched sensory feedback. After extensive use of the device, it is expected that, due to the phenomenon of brain plasticity, the WA will form its own representation in the brain, fostering a sense of embodiment for the used WA (Kieliba et al., 2021).
2.2 Design considerations
Designing WAs requires careful consideration of various factors. Our literature review has led us to identify four main considerations essential to the design of WA, as depicted in Figure 4. The first consideration is hardware design, which involves decisions about the augmentation's physical and functional attributes. This includes the WA's shape and structure (geometry), the materials and weight, its range of motion (degrees of freedom), and its sensing and actuation mechanisms. Rigid and fully actuated WAs could provide high precision movements and could reach a variety of configurations but will be heavier in weight, will require larger number of actuators, and could compromise comfort, safety and wearability (Prattichizzo et al., 2021). Soft and under-actuated WAs are lighter and more wearable, but at the cost of reduced functionality. The second consideration is mounting location, which influences the WA's functionality, user comfort, and stability when worn. Some WAs are adjustable and can be installed at several locations of the body. For instance, a supernumerary arm can be installed at the shoulder, or the waist, depending on the intended use (Nguyen et al., 2019), while other WAs are designed to be worn at a specific body location, such as a lower-body exoskeleton used to support gait (Kawamoto and Sankai, 2001). The third consideration is the control paradigm. This component, arguably one of the most challenging in design, is concerned with interfacing the WA with its user, thereby granting them agency over the WA's movements. In fact, the control consideration presents unique challenges for WAs from both conceptual and practical perspectives. There are many control interfaces that have been proposed in the literature, such as using joysticks, non-physiological human body measurements (contact forces, limb pose, limb position), and physiological human body measurements (EEG, sEMG). The fourth consideration is the provision of sensory feedback to the user through visual, auditory, or haptic feedback. For supernumerary robotic limbs, this can mean feedback on grasp strength, stride force, or the point of contact. For exoskeletons, sensory feedback might convey information such as mediolateral and anteroposterior weight shifts (for lower body exoskeletons), as detailed in Muijzer-Witteveen et al. (2018).
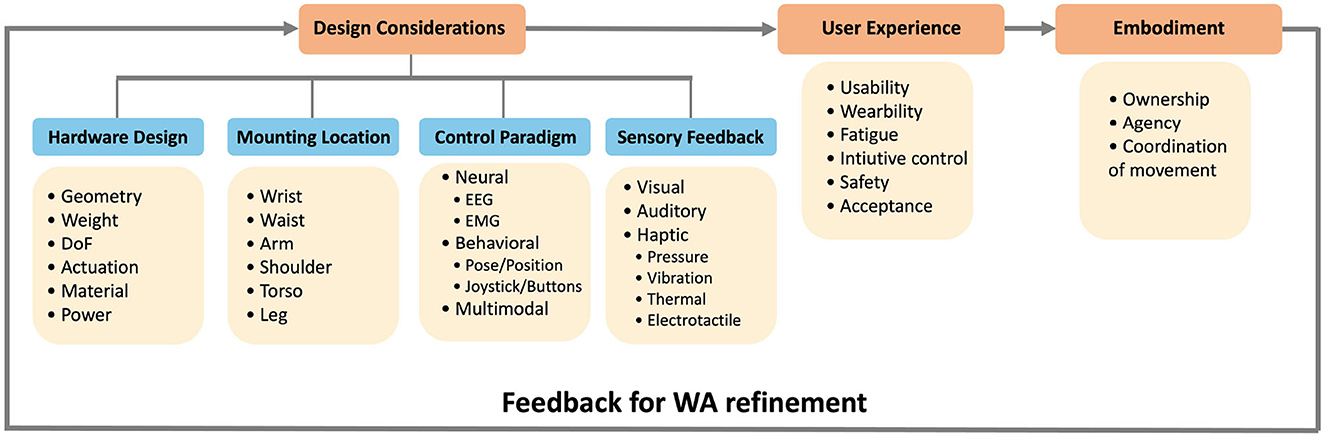
Figure 4. Design considerations of wearable augmentations. Some of these design considerations overlap with those of prostheses; however, the control consideration is unique in this context, as they require employing additional and un-utilized resources of the human body. Furthermore, the mounting locations are more versatile in the case of WAs compared to prostheses. Design considerations have direct impact on the user experience and in the long term, on embodiment.
Design choices made during the development of a WA directly impact the user experience, both when the device is worn and when in use. Usability, encompassing ease of use and learnability, is influenced by several factors, including control and sensory feedback mechanisms. Wearability, related to the user's comfort and thus affecting how long the device can be worn, is shaped by choices regarding the mounting location, weight, and material of the WA. Fatigue, closely linked to wearability, addresses both the physical and mental impact of long-term WA use, such as muscular and cognitive fatigue from ongoing interaction or sensory overload. The intuitiveness of control is crucial as it should facilitate coordination with the user's movements. Safety is another key aspect, ensuring the WA poses no physical danger or compromises user data security. Lastly, acceptance, influenced by social and psychological factors, plays a critical role in the WA's adoption.
After extended usage, user experience has a direct influence on embodiment, including the sense of ownership, agency, and the ability to coordinate the WA's movement with the rest of the body. Users providing feedback on their sense of embodiment can feed back into the design process, potentially leading to modifications in the WA's hardware, control, or sensory feedback mechanisms. These improvements could lead to a version that fosters better embodiment.
2.3 Sensory feedback
Sensory feedback, one of the design considerations, is defined as the provision of cues to users about the interaction between the WA, the human body, and the environment (Pinardi et al., 2023). This can lead to enhanced control and motor functionality (Clemente et al., 2019; Zollo et al., 2019), as well as increased sense of embodiment (Di Pino et al., 2020; Page et al., 2018). As stated in previous literature, there are three main considerations when designing a sensory feedback mechanism for a WA: the type of interaction information that needs to be conveyed (measured parameter), the form in which it is delivered to the user (feedback modality), and a feedback assessment mechanism. The measured parameter required depends on the WA's function. For example, parameters such as contact force, contact location, position, velocity, acceleration, temperature, and joint angles are relevant for supernumerary limbs (Pinardi et al., 2023), whereas weight-shift and force exertion are pertinent for lower and upper body exoskeletons, respectively. Such parameters can be conveyed to the user through modality-matched (e.g. displaying pressure information using a pressure actuator) or modality-mismatched (e.g. displaying pressure information using visual feedback) stimulation. As explained in Figure 4, feedback modalities can include visual, auditory, or haptic (including both, tactile and proprioceptive), each with its own pros and cons. As for the sensory feedback assessment, this is generally measured through four main metrics: accuracy while using the WA, latency between the event and perceiving the sensory feedback, task completion time (Shadmehr and Mussa-Ivaldi, 2012), and force regulation. Readers interested in sensory feedback for human augmentation are directed to the work by Pinardi et al., where this topic is discussed extensively.
Sensory feedback in NM-controlled WAs presents unique challenges and requires additional considerations compared to augmentations controlled by other methods. One critical aspect is the timely delivery of sensory feedback, irrespective of its type. While prompt feedback is crucial for all WAs to ensure seamless control (Cipriani et al., 2014; Sensinger and Dosen, 2020), it is especially vital for NM-controlled WAs. These devices require cognitive training prior to their use; thus, any delay in feedback can significantly affect the learning process and the effective control of the WA. In certain implementations, it is necessary to provide users with feedback upon the detection of EEG/sEMG signals that control the device (Franco et al., 2019; Cisnal et al., 2023). This notification is delivered to the participant before they can observe the resulting physical movement of the wearable augmentation. Such proactive feedback is designed to alleviate any user anxiety regarding their ability to produce the correct EEG/sEMG signals. Consequently, any delay in this feedback also presents a significant challenge, as it can affect user confidence and the overall effectiveness of the device.
Given that NM-controlled WAs require cognitive effort toward their control, additional mindfulness is required while designing the sensory feedback mechanism used. Particularly, a careful design is required in choosing the appropriate tradeoff between noticeability and frequency of the feedback, for an optimized cognitive load. We deem an adjustable sensory feedback mechanism is necessary for NM-controlled WAs to tackle this trade-off. Tailoring the type, intensity, and timing of the feedback to the user's preferences and needs could help achieve this. Also, sensory feedback could be adapted based on the users' performance, by providing more pronounced feedback for situations where users fail to perform the task properly. As users gain proficiency, the frequency of sensory feedback could be reduced to decrease cognitive burden and enhance usability.
2.4 Embodiment and neuroplasticity
A desired outcome of sensory feedback for an augmentation is embodiment, which often is associated with improved performance and utility. This means that the device is perceived as either part of, or an extension of, the body. Embodiment can be self-reported, but from a neurological standpoint, it is particularly important in the context of NM-controlled WAs. This form of embodiment can be validated by examining neurophysiological signals related to the movement of the WA and those of the natural limbs. For example, in EEG, a distinct and repeatable neural activation, in the form of an ERD, may occur during MI of the augmented device, indicating embodiment. Similarly, in sEMG-controlled WAs, initial attempts may result in noisy sEMG signals, but as the user achieves embodiment, these signals become more standardized and less noisy. These neurophysiological changes suggest neuroplastic adaptations in the brain.
Neuroplasticity is the ability of the brain to adapt its structure and functional connectivity in response to novel external conditions that promote new functions or reorganize old ones (Di Pino et al., 2014). This is the neural basis of early development in children (Hensch, 2005), acquisition of new skills (Pascual-Leone et al., 1995), and recovery from brain injuries (Chen et al., 2002). The process itself is gradual, with three phases of acquiring a new representation in the brain: the initial habituation, consolidation, and long-lasting plasticity (Karni et al., 1998). In the context of NM-controlled WAs, persistent and prolonged usage of a WA device is anticipated to induce neural changes in the motor cortex due to the motor control of the WA. Furthermore, depending on the sensory feedback modality, neuroplastic changes could occur in the somatosensory cortex (haptic feedback), visual cortex (visual feedback), and auditory cortex (auditory feedback). This is inspired from previous literature on neural plasticity of biological limbs, where it was reported that expert tennis players had enlarged hand representation in the motor cortex (Pearce et al., 2000), while violin players had enlarged somatosensory representation of their fingers (Elbert et al., 1995).
3 NM-controlled WAs: segmental perspective
This section presents a comprehensive review of NM-controlled WAs found in the literature and categorizes them based on their functionality. The first category is hand WAs consisting of devices that are designed to augment hand-related functions. These could be in the form of supernumerary fingers or hand/wrist orthoses. The second category is upper body WAs in the form of supernumerary arms and upper body exoskeletons. These wearable devices are concerned with providing support to the upper body in performing gross manipulation tasks and increasing endurance during industrial tasks. The third category is lower body WAs in the form of supernumerary legs and lower body exoskeletons. These devices are concerned with providing extended stability and standing support, assisting in restoring locomotion, or reducing the metabolic cost of gait.
3.1 Hand wearable augmentations
Hand WAs come in various forms, including hand orthoses that assist stroke patients and supernumerary fingers that serve as assistive aids or augmentative tools. These devices are crucial for compensating for the loss of hand abilities caused by strokes, offering solutions to regain grasping capabilities. For healthy individuals, they enhance hand dexterity for complex tasks and expand the manipulation workspace. Hussain et al. have been at the forefront of hand WAs research since their pioneering work on supernumerary fingers commenced in 2014. Their earliest implementation of a hand WA was motion-controlled (and not NM-controlled), where hand movements recorded by a smart glove were translated into commands to control the supernumerary finger, aimed to enhance manipulation dexterity (Prattichizzo et al., 2014). The first sEMG-controlled hand WA was introduced in 2016 in the form of a supernumerary finger (Hussain et al., 2016a), targeting stroke patients. The developed supernumerary finger acted as one part of a gripper, while the paretic hand as the other part of the gripper, compensating for the lost ability to grasp. The supernumerary finger was controlled through an eCap interface (with three electrodes) that utilized sEMG signals from the frontalis muscle for its flexion and extension. The control mechanism was based on a finite state machine, where one frontalis muscle contraction could move or stop the movement of the finger in a particular direction, while two consecutive contractions switched the control direction from flex to extend or vice versa. The functionality and effectiveness of the supernumerary finger were tested with six stroke patients who went under the Frenchay Arm Test. Patients were able to perform some of the Frenchay Arm Test tasks with the supernumerary finger such as grasping a cylinder and picking up a glass, which they could not perform without the supernumerary finger. However, some patients failed performing some of the Frenchay Arm Test tasks despite using the supernumerary finger (Hussain et al., 2016a); those failures were caused by the limited arm mobility. Following the same control mechanism, authors equipped the sEMG-based supernumerary finger with an arm support system used during the rehabilitation period (Hussain et al., 2017a). The proposed system enabled stroke patients to perform some of the Frenchay Arm Test tasks that they could not perform with the supernumerary finger alone, such as combing their hair.
To enable precise manipulative tasks, a sEMG-based supernumerary finger capable of performing both a precision and power grasp, involving the fingertip or the full finger respectively, was developed (Salvietti et al., 2016). The flexion and extension control mechanism was based on the frontalis muscles, similar to that described by Hussain et al. (2016a), but included an additional control signal based on three muscle contractions, allowing switching between power and precision modes. In another study (Hussain et al., 2016b), the issue of compliance of the supernumerary finger was addressed using a dual sEMG interface. The first component consisted of a sEMG armband placed on the forearm, which recognized five different gestures and associated them with movements of the supernumerary finger. For instance, “wave-in” and “wave-out” gestures corresponded to the respective extension and flexion of the supernumerary finger, while a “closed-fist” gesture triggered full extension, and “fingers spread” signaled a stop. The other sEMG interface was located at the bicep of the contralateral arm and continuously measured compliance, specifically the tightness of the grip. This prototype was tested on both impaired and healthy individuals; results showed that users were able to complete the desired tasks for compensation and augmentation with the supernumerary finger successfully.
In 2017, an enhanced sEMG-controlled hand WA prototype with multiple fingers was proposed (Hussain et al., 2017b). Such augmentation with higher DoFs is more suitable for high payload tasks. This work employed the same control mechanism as presented by Hussain et al., but enhanced the control by incorporating auto-tuning calibration to better accommodate the user-dependent nature of the sEMG signals. Similarly, Leigh and Maes (2016) developed a wearable sEMG-based multi-joint interface with two flexible, finger-like extensions. Beyond grasping, the proposed augmentation could carry objects or turn a doorknob while hands are occupied, and could provide a stable base or support for writing. Those were controlled through a sEMG-based gesture recognition through an armband placed at forearm close to the elbow.
Seeking a more natural interface, Liu et al. (2021) proposed a flexible supernumerary finger controlled by a hybrid EEG-sEMG system. sEMG signals were measured from the frontalis muscles, while EEG signals were measured from the contralateral motor cortex. A 4-week study involving 10 healthy subjects revealed that employing EEG to initiate grasping and sEMG to release objects led to faster task completion (~7 s) and higher success rates (~90%), specifically in bimanual tasks performed with one hand. Grasp initiation was triggered through a detection of ERD at C3 electrode as a result of performing the MI of flexing the supernumerary finger; this detection was done through a trained convolutional neural network. sEMG signals from eyebrow raises, processed with a simple threshold method, controlled object release. A follow up study attempted to use exclusively EEG for control using MI (Liu et al., 2022). A convolutional neural network model was used for identifying MI of the supernumerary finger's flexing. A genetic algorithm was used to select optimal channels for controlling the supernumerary finger, thus enhancing adaptability for individual users. A real-time control experiment was undertaken with 10 subjects, which involved bending the supernumerary finger; an average classification accuracy of 70% was achieved. No mechanism was proposed for the extension of the finger in this work.
Several supernumerary robotic fingers implementations utilized sensory feedback in their design to improve control and embodiment of the WA. Meraz et al. (2017) developed a sEMG-controlled supernumerary finger where differential electrodes located behind the ear were used to capture the sEMG signal and to control the finger's fingertip in two directions: horizontally and vertically. The system was equipped with dual feedback mechanisms: visual and haptic. The visual feedback was provided via a head-mounted display that showed the finger's position, whereas the haptic feedback was conveyed through electrical stimulation on the palm, signaling contact with external objects. In subsequent work, Shikida et al. (2017) developed a sEMG-controlled supernumerary finger operated by signals from the left and right posterior auricular muscles. The bending angle of the thumb was determined by the activation level of these muscles, with the robotic finger moving toward the side of the stronger muscle contraction. The WA was designed to provide sensory feedback about the joint angle of the thumb through various vibration patterns delivered at the bases of the index and pinky fingers. This feedback was found to increase the operability of the supernumerary finger through the observed reduction in mistakes in a finger-reaching task. Another work that utilized the same control mechanism for the supernumerary finger (Aoyama et al., 2019) employed an alternate sensory feedback method that relies on the vibrotactile phantom sensation. Using two vibration motors positioned at the back of the palm, the intensity of vibration for each motor varied depending on the position of the supernumerary finger. This variation altered the perception point accordingly, which corresponded to the finger position. Another work (Franco et al., 2019) proposed the use of vibrotactile feedback for sEMG-controlled supernumerary finger to solve a very relevant problem; correctly detecting the intent of moving the supernumerary finger through sEMG. Conventionally, subjects have to wait to see the impact of their control visually which is time consuming and impractical. Authors found that providing vibrotactile stimulation on the forehead, signaling a detection of a sEMG sourced command, reduced the required muscle effort and the time needed to perform tasks.
As for hand orthoses, most of the implementations are developed to aid in the rehabilitation of wrist and finger functions for stroke patient. Many of these devices utilize sEMG-based implementations. In such setups, sEMG signatures corresponding to rehabilitation movements, such as opening, closing, relaxing, or forming a spherical grip with the hand, are captured. The mapping of the sEMG signals to these specific movements is achieved through various methods such as simple thresholding (Cisnal et al., 2023), machine learning classifiers (Park et al., 2020), or deep learning models (Chen et al., 2021). As for EEG-based orthoses, an implementation by Araujo et al. utilized MI of the right and left hand to respectively control the flexion or cessation of flexion in all fingers. However, there was no mention of a mechanism for extension. After a training session, an LDA classifier was employed to differentiate between the two classes. In 2023, a novel wrist orthosis utilizing both sEMG and EEG control was developed to facilitate six distinct gestures (Yang et al., 2023). The system primarily operated on sEMG control, acquired through an armband and processed by a convolutional neural network to map sEMG patterns to the specific gestures. However, when fatigue was detected, the system automatically switched to EEG control to prevent further fatigue. EEG signals were acquired using three electrodes placed on the forehead, and control was binary–indicating either the presence or absence of motion intent. The potential movements were displayed on a screen, and the subject decided whether to ignore the cue or intend to move. A summary of the hand WA literature along with their specifications is shown in Table 1.
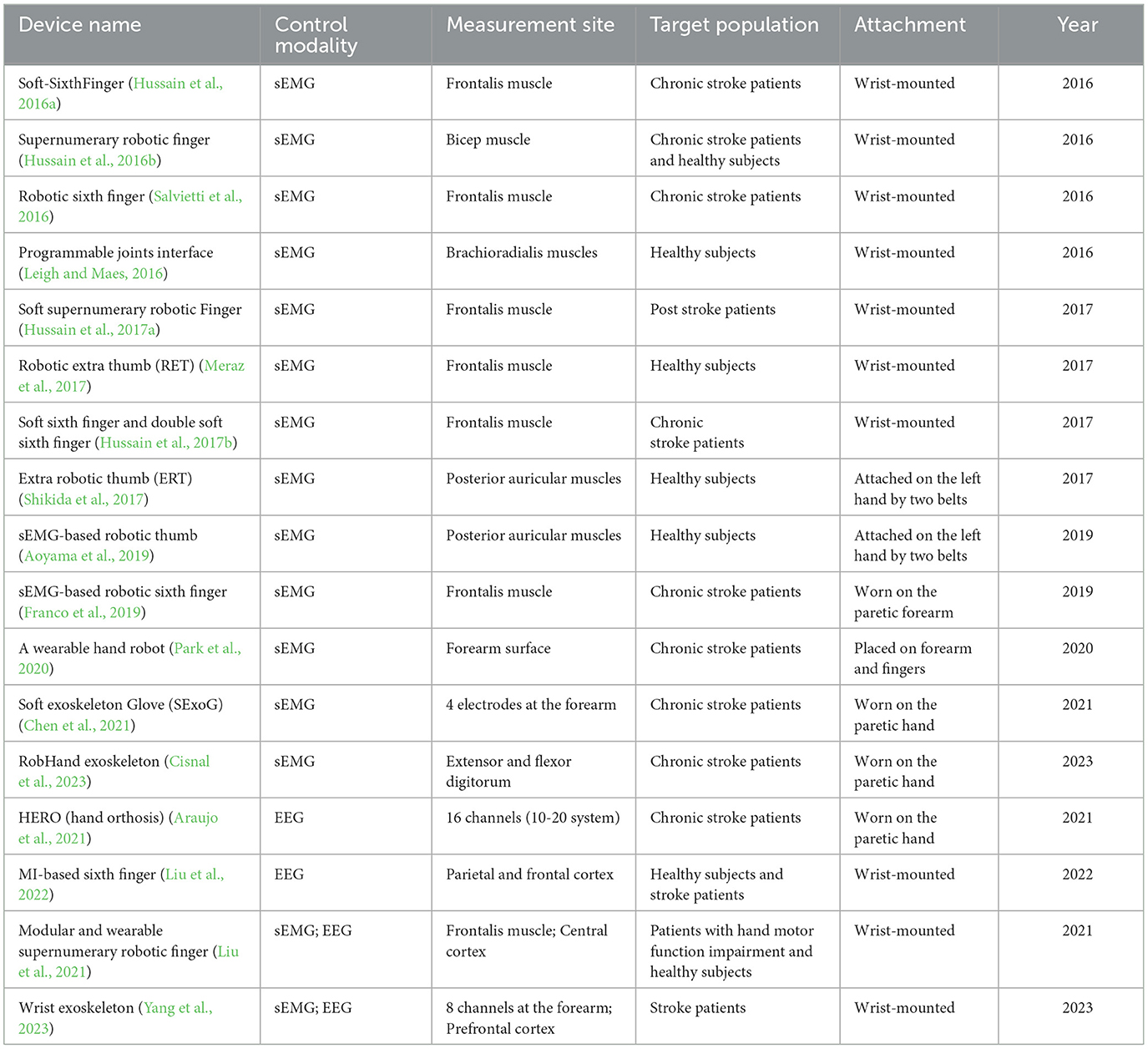
Table 1. Specifications summary of hand WAs.
3.2 Upper body wearable augmentations
Upper body exoskeleton and supernumerary arms both serve to enhance upper body functions, yet they are tailored for distinct applications. Upper body exoskeleton serve a dual purpose. They are essential for the rehabilitation and functional restoration of individuals with upper limb impairments. Additionally, they provide robust support for healthy individuals, cushioning shock during drilling tasks, enhancing endurance for extended weight carrying, and facilitating the lifting of heavy loads for brief duration. Conversely, supernumerary arms are designed to broaden the workspace and increase the DoF for able-bodied users, or to serve as a substitute arm for individuals with impairments, such as stroke patients, offering an alternative to the affected limb.
The vast majority of upper body exoskeletons found in the literature are controlled through sEMG. Focusing on those designed to augment the abilities of healthy individuals, Zhang et al. (2019) developed a sEMG-based upper body exoskeleton that enhanced bicep function. A closed-loop system measured bicep activity via sEMG sensors and adjusted a pneumatic muscle's pressure to match the exertion, allowing users to control their force output. This exoskeleton doubled the lifting capacity for industrial workers, allowing them to perform repetitive lifting tasks with twice the efficiency. Another example is by Lotti et al. (2020) who developed a real-time sEMG-based upper body exoskeleton for elbow support. This exoskeleton used three sEMG channels and the joint angle of the elbow to calculate the elbow flexion-extension torque, where a calibration session was conducted for the controller taking individual anthropometric features into consideration. Using this exoskeleton significantly reduced exerted force by the users across different loads up to 2 kg. A subsequent study (Treussart et al., 2020) developed a sEMG-based control mechanism for a rigid upper body exoskeleton with the goal of assisting biceps with carrying unknown loads. The system was able to predict the direction and intensity of the intended movement and was able to adapt to different users through calibrating user-specific parameters in the control method. The controller used a closed-form non-linear exponential-power relationship to estimate torque from the sEMG signal. A significant reduction of physical strain and muscles effort was observed upon using the exoskeleton device. Recently, Lee et al. (2023) developed a soft upper body exoskeleton to provide further strength to multiple joints in the shoulder and elbow using pneumatic artificial muscles. The system operated by interpreting sEMG signals from the shoulder and upper arm to control the exoskeleton, with a cloud-based artificial intelligence solution predicting the user's movement intentions. The WA could differentiate between four intended movements (shoulder/elbow, flexion/extension) with an average accuracy of 96.2%, offering four times the strength to the user, and featuring a rapid response rate of <250 ms.
Similarly, upper body exoskeletons used for rehabilitation are predominantly controlled through sEMG. An early implementation was proposed by Kiguchi and Hayashi (2012), a sEMG-based impedance control method for a rigid upper body exoskeleton for self-rehabilitation practices. The algorithm dynamically controlled the WA's stiffness and damping properties, adapting to the user's unique sEMG signal features and specific body characteristics through a neuro-fuzzy modifier. Another study employed two sEMG channels on the biceps and triceps to assist in carrying loads up to 10 kg. In this work, the sEMG amplitude was mapped to a force exertion by the upper body exoskeleton using a fuzzy logic algorithm (Jeon et al., 2012). A subsequent work (McDonald et al., 2017) proposed a sEMG-based rehabilitation upper body exoskeleton system for spinal cord injury (SCI) patients. The system was designed to predict an intended movement out of sixteen possible movement involving the wrist, elbow, and forearm from the sEMG waveforms. Linear discriminant analysis was used to classify the intended movements of the users, involving single or multiple degrees of freedom or a combination of both. A classification sensitivity of 82% and 66% were achieved for the healthy population and the SCI patients, respectively.
A unique implementation of a rehabilitation upper body exoskeleton was by Kawase et al. (2017) where a hybrid EEG/sEMG control system was utilized for real-time rehabilitation and support. The desired motion was selected using EEG signals through an SSVEP paradigm and an SVM classifier, which relied on features extracted from a single electrode at the occipital cortex. Meanwhile, sEMG signals were utilized to predict the intended joint angle; this estimation was performed using a mathematical model of the musculoskeletal system commonly applied in neuroscience research (Maintained, 2009). Their experiments with SCI patients demonstrated the exoskeleton's ability to assist users in carrying objects effectively. Particularly, users positioned their arms at appropriate angles, with a correlation coefficient between the required and measured angles of 0.9 for SCI patients.
Unlike upper body exoskeletons, the supernumerary arms are relatively recent. The first NM-controlled supernumerary arm was proposed in 2018 by Penaloza and Nishio (2018) and Penaloza et al. (2018). An EEG-controlled supernumerary arm for multitasking side-by-side with the natural arms through MI was demonstrated. Authors also explored equipping the supernumerary arm with vision capabilities to evaluate the context of the manipulation task (Penaloza et al., 2018). A calibration session was conducted for each subject to optimize the EEG frequency band and channels, setting a simple threshold on the PSD values to distinguish between grasp and release actions. The EEG signal was used to detect the intention of the grasp while the camera was used to detect the object thus choosing a suitable grasping method. The supernumerary arm demonstrated successful object grasping and releasing capabilities, distinguishing between grasp and release actions with an average accuracy of 70% during multitasking. A year after, a novel soft supernumerary arm akin to an elephant trunk was proposed, with reconfigurable end effectors based on the task (suction, grasper, and holder) (Nguyen et al., 2019). The proposed supernumerary arm used pneumatic actuation and was mountable at different locations. Two sEMG signals acquired from both biceps were used to control the pressurization (three levels) and the direction of the motion (8 angles), respectively, based on simple threshold mapping. Test scenarios such as opening a door, picking an object, and holding an umbrella were carried out, and the supernumerary arm demonstrated its ability to carry up to 3.8 kg. Recently, Tang et al. (2022) proposed an EEG-based supernumerary arm with three rigid fingers, developed for stroke patients with a nonfunctional natural arm. The system was comprised of a module for grasp intention recognition using EEG data through MI or natural limbs and another module for object detection to identify the position of the target. The outputs of both modules fed into a hybrid module for arm trajectory estimation. Graph convolutional networks and gated recurrent unit network models were used for EEG intent predictions, leading to an average grasping success rate of 86.44%.
Apart from developing supernumerary arms for enhancement or rehabilitation purposes, Asada's team developed two, stick-like, supernumerary arms controlled through abdominal muscles, to explore the dynamics of using both natural and supernumerary arms concurrently (Guggenheim et al., 2020). Users were requested to minimize the positional discrepancy between each of the four limb's tip and specific targets (Guggenheim et al., 2020). It was found that during multitasking, participants used their natural arms first before using their supernumerary arms with a significantly different movement starting time. Such a finding suggests giving priority for natural limbs for time-sensitive tasks. A summary of the upper body WA literature along with their specifications is shown in Table 2.

Table 2. Specifications summary of upper body WAs.
3.3 Lower body wearable augmentations
Lower body exoskeletons and supernumerary legs both fall under lower body WAs. Lower body exoskeletons are versatile devices designed to address various mobility needs including gait support for the elderly or individuals with walking disorders. For those with paraplegic conditions, lower body exoskeletons enable upright walking and thus granting independence. Additionally, they play a pivotal role in the rehabilitation and restoration of walking abilities for individuals recovering from SCI or strokes (Contreras-Vidal and Grossman, 2013), facilitating the retraining of muscles and neural pathways through repetitive motion and therapeutic exercises.
Several commercially available lower body WAs, in the form of exoskeletons, have been utilized in research literature, where NM-control paradigms are developed for their operation such as Rex (Rex Bionics, 2023), Lokomat (Hocoma, 2023), and HAL (Lower Limb HAL, 2023). For unique research goals or to explore innovative control strategies, some research groups have developed their own custom-made lower body exoskeletons.
The first NM-controlled lower body exoskeleton, HAL-3, was developed in 2001 (Kawamoto and Sankai, 2001); earlier versions of this WA were controlled through other non-physiological means. HAL-3 was controlled by sEMG signals from the upper leg and designed to offer power assistance, aiding in ambulation for patients who could move their muscles but require additional strength for movement. The WA predicted joint torque based on the acquired sEMG parameters through a linear equation where its parameters were calibrated for each subject. To mitigate any discomfort from inaccurate torque predictions or time delays, the system incorporated a feedforward controller, ensuring rapid response for power assistance.
A limitation of sEMG-based lower body exoskeleton is their unsuitability for stroke patients with low sEMG activity or significant muscle spasticity. An alternative is EEG-based lower body exoskeletons, where such implementations are based either on endogenous or exogenous signals (see section 1.2.2). The first EEG-controlled lower body exoskeleton was proposed in 2012, called EEG-oneDoF, due to its single DoF designed to assist with stand-up and sit-down movements (Noda et al., 2012). This custom-made WA was controlled through MI of right- and left-hand movement; EEG data was formed into a covariance matrix and fed into a trained linear classifier achieving an accuracy of 71%. Since the output of the classifier can fluctuate, a hysteresis algorithm was employed. The EEG-oneDoF exoskeleton, was equipped with visual feedback. Visual feedback was displayed on a screen showing the probability of the EEG decoder predicting stand-up or sit-down.
Similarly, Do et al. proposed a predictive model that detects kinesthetic MI of walking, aiming to enable gait for patients with SCI. EEG data segments of 0.75 s were acquired every 0.25 s using a sliding overlapping window. A state transition was guaranteed when the model consistently predicted that state for 2 s, achieving an accuracy of 86.3% (Do et al., 2013). Another study (Lee et al., 2017) introduced a cascaded classification system that differentiates between walking and turning movements using EEG data. Users performed MI tasks involving either moving or relaxing both hands. These MI signals controlled the first stage to predict walking versus turning, and the same movements differentiated turning right from turning left in the subsequent stage. ERD data from the motor cortex were utilized for prediction, with a random forest classifier handling classification. The proposed system achieved an average accuracy of ~92.4%. Real-time visual feedback was displayed on a screen, showing the action predicted from brain signals and the subsequent actions to be performed by the WA.
Other studies have also explored the concept of intent prediction, the other form of endogenous control, applied to lower body exoskeleton. For instance, Kilicarslan et al. developed Neuro-Rex, a lower body exoskeleton designed to facilitate walking, turning, sitting, and standing for paraplegic patients. This was done by predicting intent from movement-related cortical potential below 2 Hz (Kilicarslan et al., 2013). The system achieved a three-class accuracy of 97% for walking, turning right, and turning left motions and 99% for sitting, resting, and standing motions. Building on this, further research introduced an EEG-based intent detection system which aided gait in stroke patients using the Lokomat Pro, a commercialized lower body exoskeleton tailored for such applications (Garćıa-Cossio et al., 2015). Employing a logistic regression classifier and focusing on alpha and beta bands at the sensorimotor cortex, the system achieved 89% accuracy in predicting walking and idling states. A similar lower body exoskeleton was proposed to enable gait, but based on both MI and movement intent (López-Larraz et al., 2016). The system was able to achieve 84 and 70% decoding accuracy for healthy and SCI patients, respectively, in choosing between rest and walk conditions.
Lower body exoskeletons have also been successfully controlled by exogenous EEG signals, predominantly using SSVEP. For example, Kwak et al. (2015) made use of five flickering LEDs at unique frequencies from 6 to 13 Hz to elicit SSVEPs detectable in the occipital cortex. These potentials were then classified using k-nearest neighbors classifier and utilized as control signals to command the lower body exoskeleton. These commands were walking forward, turning right, turning left, sitting, and standing, and achieved an accuracy of 91%. Another innovative study (Gui et al., 2017) introduced a locomotion trainer with multiple gait patterns, which operated on a hybrid control approach employing both EEG and sEMG signals. This system used four flickering LEDs at different frequencies to trigger SSVEP, corresponding to four control modes: stop, walk, speed up, and slow down. Concurrently, sEMG signals from the right knee joint were analyzed to predict the torque required for the task. This dual-modality system was tested on both healthy individuals and stroke patients, achieving an accuracy of ~ 92.40% in detecting the four movements using a LDA classifier.
Apart from using lower body WA for locomotion and gait assistance, EEG-controlled systems have been used for neuro-rehabilitation purposes, creating tangible impact on patients neural pathways. Such investigation was conducted by Donati et al. (2016), where eight individuals with chronic SCI underwent training for a year. The paradigm incorporated immersive virtual reality training using brain signals to control a virtual avatar and later to control a custom-made lower body exoskeleton with tactile feedback. This formed a feedback loop enabling real-time observation of brain activity outcomes. Results indicated that all eight patients exhibited neurological enhancements in somatic sensation and enhanced ERD during MI. As a result, 50% of these patients were upgraded from chronic to incomplete paraplegia classification. For sensory feedback, the work employed force sensors on the lower body WA and a multi-channel haptic display (vibrators) on the patients' forearms to provide continuous tactile feedback during gait training. The results showed that the feedback mechanisms may contribute to cortical and subcortical plasticity, potentially aiding in partial neurological recovery.
Beyond rehabilitation and gait assistance, research explored the use of lower body exoskeleton for reducing the metabolic cost of walking for healthy individuals. One study (Gordon and Ferris, 2007) investigated a pneumatically powered ankle exoskeleton that operated via sEMG control, where the exoskeleton's activation was proportional to the user's soleus sEMG activation. This research demonstrated that ten healthy subjects were able to reduce the activation of their soleus muscle by ~35% when using the exoskeleton. It is important to note that, despite recent advancements in developing lower-body exoskeletons aimed at reducing the metabolic cost of gait, these recent systems predominantly employ non-neural control methods (Nuckols et al., 2020; Kim et al., 2019; Lim et al., 2019), rather than neural approaches such as EEG or EMG. This is not necessarily the case for lower body exoskeletons developed for other applications.
Finally, work on NM-controlled supernumerary legs is relatively limited in the literature. Parietti and Asada (2017) proposed a pair of supernumerary legs worn at the hip, with a wide and hemispheric workspace and capable of fully supporting the weight of the user. These legs were controlled by two sEMG signals from the torso and two from the chest muscles. A contraction of the right-side muscles moved the right leg forward (chest muscle) or backward (torso muscle), and similarly for the left leg. Muscles on the upper body were used to control the extra limbs without interfering with the natural limbs, thus enabling independent control of the supernumerary legs. Subjects were able to achieve accurate and independent control of the supernumerary legs. A summary of lower body WA systems with their features is presented in Table 3.
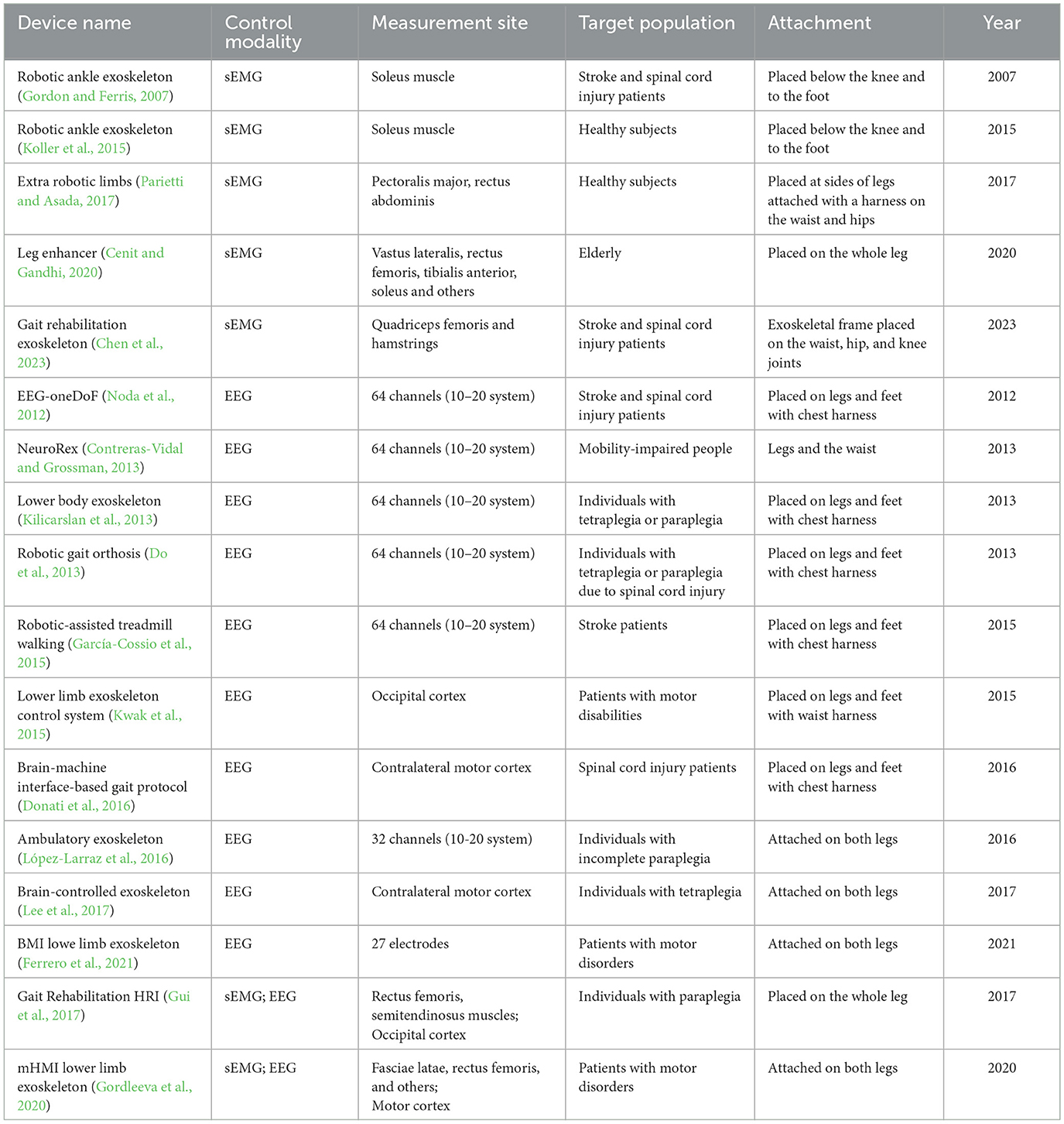
Table 3. Specifications summary of lower body WAs.
3.4 Commercial products
There are several commercially available WAs designed for rehabilitation and enhancement. For example, the Lokomat is a robotic device that assists patients with walking difficulties by providing targeted gait training using virtual reality, facilitating recovery through an adjustable exoskeleton that supports the legs during therapy sessions (Hocoma, 2023). Another example is REX, a hands-free robotic WA that enables users to stand, walk, and engage in therapeutic exercises without crutches (Rex Bionics, 2023). However, both Lokomat and REX, like many similar products, rely on control paradigms that are not NM-based.
NM-controlled WAs are a promising but still emerging technology. While sEMG and EEG can offer reliable control, this is often limited to controlled research environments. Many NM-controlled systems in the literature integrate the hardware of commercially available products with novel NM-control paradigms to develop more advanced solutions.
There are a few commercial WAs that do utilize sEMG for control. One example is the HAL Lower Limb, a medical device designed to assist individuals with neuromuscular diseases, spinal cord injuries, and stroke. By detecting sEMG signals from the skin's surface, it translates the wearer's neural intentions into movement, enhancing mobility and rehabilitation (Lower Limb HAL, 2023). Similarly, the HAL Single Joint Type is a compact, lightweight robotic device focused on joint-specific rehabilitation, targeting areas like the elbows, knees, shoulders, and ankles, also controlled via sEMG (Single Joint HAL, 2023).
While there are few NM-controlled WAs utilizing sEMG, there are no commercially available WAs that rely primarily on EEG for control. EEG-based control remains largely within research settings, as the technology is still in development for real-world applications. This highlights a significant gap in the commercialization of EEG-based WAs, which could potentially offer more intuitive control for users.
3.5 Summary of findings
The summary of findings on NM-controlled WAs highlights several key points. Firstly, NM-controlled upper body and lower body exoskeletons are among the earliest implementations of WAs, with a substantial body of literature documenting these developments. In terms of supernumerary limbs, supernumerary fingers stand out as both the earliest and most researched, given that hands are the most utilized body part for physical interaction with the world. Conversely, supernumerary legs and arms have received less attention, likely due to the more complex design challenges they present.
Furthermore, it is observed that EEG is frequently used for lower body exoskeleton control, while sEMG is commonly used for upper body and hand WAs. This could be due to how EEG activations linked to larger natural effectors, such as legs, are more easily distinguished from effectors that might require finer control, such as hands and fingers. In addition, sEMG could be the more useful counterpart for the latter two types of NM-controlled WAs when considering that upper body and hands are often associated with tasks that require finer adjustments in muscular torque. Nonetheless, there is a rising trend of using both EEG and sEMG as a hybrid control modality. These implementations use EEG for intent detection and sEMG for force estimation, or switch between modalities upon detecting fatigue. Additionally, as EEG classification methods improve, distinguishing neural activity associated with smaller effectors, such as fingers, is becoming possible. This advancement suggests the potential for hybrid EEG-sEMG systems to achieve finer control in NM-controlled WAs.
Additionally, a summary of the commonly used muscles for sEMG signal generation toward controlling each of the three types of WAs is shown in Figure 5A. Depending on the application and other design considerations, the choice of the muscle varies. It can be observed that muscles used to control hand WAs are located on the arms, forehead, or around the ears. For upper body WAs, muscles located at the chest, abdomen, and arms are commonly employed. On the other hand, lower body WAs commonly utilize muscles of the abdomen or legs for sEMG-based control. As for EEG based control, a summary of the commonly used cortical activations toward controlling WAs based on the EEG signal type is shown in Figure 5B. These signals are not specific to the type of WA employed; instead, they are related to the eliciting neural mechanism. MI of WAs elicits ERDs in the central and frontal areas. MI and movement-related cortical potentials (MRCPs) of natural limbs, used to control WAs, are commonly detected in the central cortex. Lastly, SSVEP in the occipital cortex, elicited in response to visual flickering stimuli, has proven beneficial in controlling WAs.
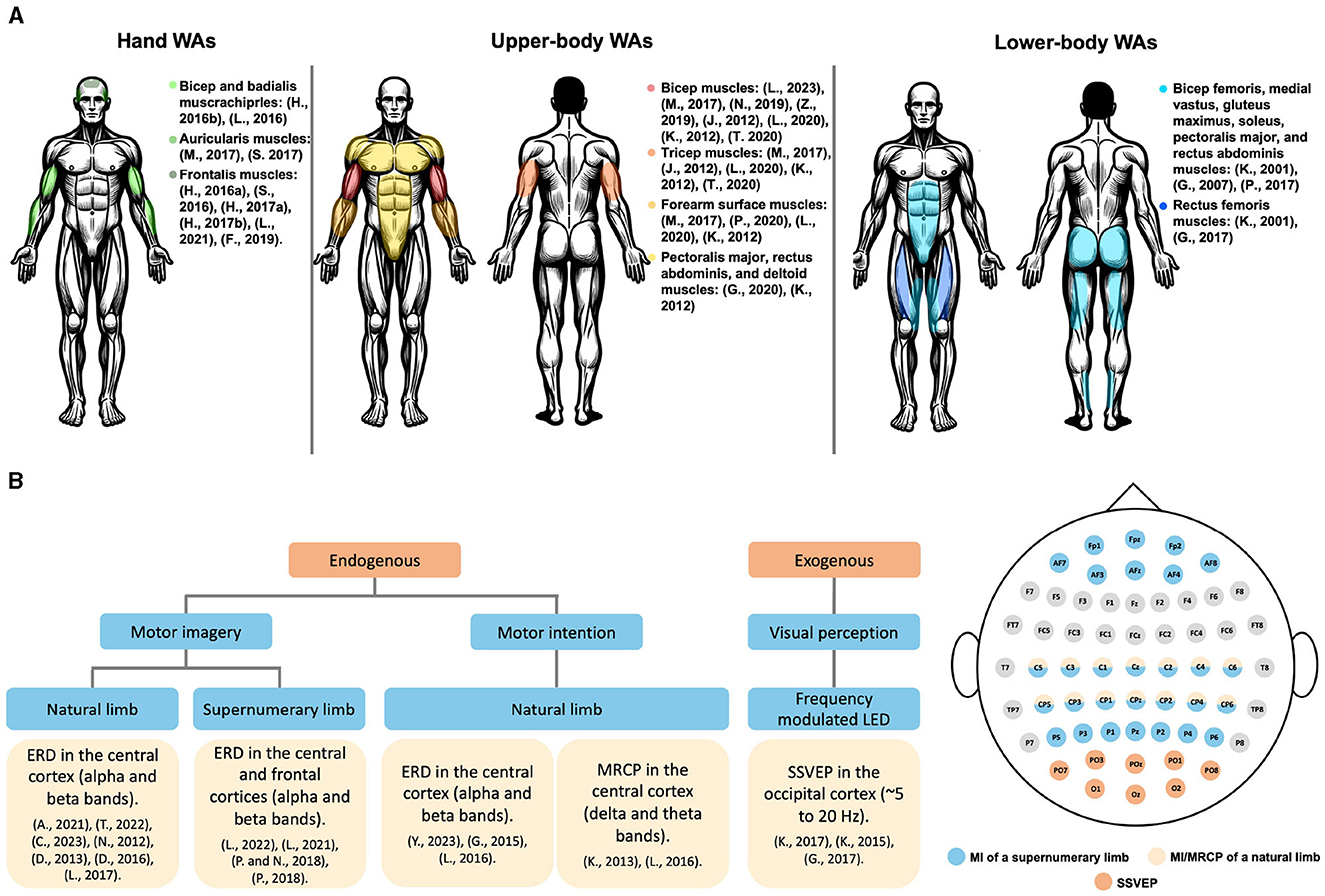
Figure 5. Pictorial summary. (A) An illustration depicting the muscles utilized for acquiring sEMG signals, depending on the type of WA, which are frequently employed in WA control. (B) Employed EEG signals for WAs control and their acquisition locations on the scalp. MI, motor imagery; MRCP, movement related cortical potentials; SSVEP, steady-state visually evoked potentials.
It is interesting, but reasonable, to note that MRCPs are largely linked to those of natural limbs, rather than supernumerary ones. The intent to move differs from MI, arguably more intuitive than its counterpart. Thus, it is more likely to be observed for natural effectors, which already possess cortical representations that can be easily accessed. On the other hand, supernumerary effectors are by nature foreign to the user's natural body representation, thus requiring a high degree of embodiment even for MI. An extended duration of training, as well as considerations for embodiment, would likely be required in order to move from MI to motor intention for supernumerary limbs, if indeed this shift is feasible.
This leads to another key observation, that sensory feedback is often an underemphasized element in NM-controlled WA design. For instance, only one upper body WA was found to employ sensory feedback in its design (Cisnal et al., 2023). On the other hand, few examples of hand WAs were found to employ sensory feedback to convey proprioceptive as well as tactile information. A summary of NM-controlled WAs incorporating sensory feedback is summarized in Table 4. Finally, minimal research exists on evaluating the effects of prolonged use of WAs, particularly examining the long-term neuroplasticity and embodiment effects of these devices.

Table 4. Summary of literature on WAs that employ sensory feedback in their design.
4 Outlook
4.1 Challenges and future work
The field of NM-controlled WAs, situated at the intersection of various disciplines, introduces multiple dimensions of challenges. Each challenge presents an opportunity for a future work. Below, we list some of these persistent challenges and possible directions for overcoming them:
• Consistency of performance: Research has shown that physiological signals, including EEG and sEMG, contain personalized elements, leading to variations in neural correlates from one individual to another. A significant challenge in NM-controlled WAs is the consistency of performance across different users. Developing calibration and fine-tuning algorithms to personalize these NM-controlled WAs represents a promising direction for future research, potentially utilizing big neurophysiological data to train AI based solutions.
• Context-aware control: WA technologies must be equipped with capabilities to perceive and interpret contextual information from the environment, such as user intentions, task requirements, spatial awareness, and social cues. By leveraging this context, WAs can dynamically adjust their behavior, control strategies, and interaction modalities to better assist, collaborate, and communicate with the user. A key challenge is the development of robust context recognition and understanding algorithms that can accurately interpret complex user and environmental cues. Another challenge is the design of efficient control strategies that can seamlessly integrate the context-aware information with the user's natural movements and intentions. One possible direction is the integration of multimodal sensing technologies (augmenting EEG-sEMG sensing with visual, auditory, and tactile sensors) to capture context-rich information and utilize machine learning algorithms to offer shared control of the WA. Furthermore, advances in machine learning offer exciting solutions for WA control. A recent example presents a deep learning method for predicting finger forces from motor units in the forearm using unsupervised approach. This eliminates the need for labeled finger force data during training, making it applicable in cases where force measurements are unavailable, such as in individuals with amputations (Meng and Hu, 2024).
• User-centered and ergonomic design: The need for user-centered and ergonomic WA is widely recognized. The number of WA in daily use is still very low not only due to missing availability on the market but also due to usability challenges. Personalized WA technologies that can be used by specified users to achieve specified goals with effectiveness, efficiency, and satisfaction in a specified context of use are far from being a reality. Involving all stakeholders, including the end user, throughout the development process to address human/environmental factors is essential. Physical and psycho-social factors, such as physical abilities, varying skills, knowledge, prior experiences or expectations must be investigated and valued as design criteria. In addition, ergonomic factors, such as muscular fatigue, stress on the musculoskeletal system, and technology acceptance should also be considered through self-reports, observational, and cognitive methods. Performing ergonomic risk assessments in order to evaluate the impact of WA technologies on the health and wellbeing, such as the development of musculoskeletal disorders is essential. Long term ergonomic effects should also be examined and incorporated in the design process.
• Ethical considerations: WAs raise several ethical concerns that need to be navigated by several entities in the community such as medical professionals, WAs designers, stakeholders, legislators, and others. Potential ethical challenges and concerns include safety, security, data privacy, accessibility and equity, and long-term neural effects such as manipulation of body representation in the brain. Safety considerations include safeguarding against hazards from power sources such as batteries, preventing sudden and un-intentional high force exertions, ensuring protection against falls in lower body exoskeletons, and avoiding collisions with obstacles. There is a pressing need for personal care robots' standards (such as ISO 13482) to be tailored for WAs. As for security, it is vital to protect these devices from unauthorized access and control by entities other than the intended user, developing layers of security. Unequal access to WA technologies, due to high cost of the technology, raises concerns about fairness and equity. Such disparities could significantly affect individuals' opportunities to compete in the society. Excluding marginalized communities can be seen as morally problematic and has to be addressed by developers and legislators (Oertelt et al., 2017). Finally, there are several neural complications that might arise due to and during the usage of WAs, many of those are discussed in the literature (Dominijanni et al., 2021). One possible complication is altering the body representation in the brain and thus impairing individuals from using their natural limbs to their full-extent.
4.2 Trends
Finally, being in its early stages, the field of NM-controlled WAs is ripe with various trends presenting exciting opportunities. Below, we present some of these emerging trends:
• WA evaluation: developing WA evaluation methods, based on self-reports, performance, behavior, and cognitive factors, in order to evaluate the impact of WA technologies on the health and wellbeing is essential. Furthermore, the assessment of the long-term use of WAs and its impact on the neural body map in realistic and practical environment represents a venue for exploration.
• Multimodal fusion: given how WA operate in unstructured environments and interact closely with humans, incorporating multi-modal sensors enables WAs to accumulate and process information from diverse sources, leading to enhanced reliability and usability. Furthermore, multimodal sensory feedback (such as proprioceptive and cutaneous) offers the potential to improve embodiment and influence plasticity in order to improve performance. Developing algorithms for information fusion warrants the enhancement of motor performance and user satisfaction.
• Soft WA: designing soft WAs represents a promising direction toward creating more user-friendly and ergonomic devices. Recent advancements in soft robotics and material science could lay the groundwork for this development.
• MI training paradigms: in order to improve the performance of neuromotor WA control, MI training paradigms must be developed to reliably and effectively induce distinct MI signatures for the augmentation. Such a training paradigm would involve a combination of motor observation, motor execution, and MI exercises using virtual and physical environments. Furthermore, training paradigms should explore the use of positive sensory feedback to promote kinesthetic MI functions to improve the clarity of MI and the overall motor performance, as well as the embodiment of the WA device. Finally, the neurological changes in MI and body representation over time should be investigated. Machine and deep learning models can be utilized to extract MI signatures from EEG data and adapt the positive sensory feedback in order to accelerate the MI training.
• AI augmentation: with a promise to enable machines to perform tasks that require human intelligence, AI has become a hot research topic in recent years. Based on the results of this review, most of the contemporary WA technologies are not equipped with the computing power for AI augmentation in order to fuse multimodal data from various sensing systems. Advanced AI algorithms are needed to fuse the collected multimodal raw data and understand the user and environmental context. Furthermore, AI methods can monitor the health of the WA device. Repair and maintenance can then be triggered automatically upon detecting a malfunction. Finally, with the success of using large language models in many applications, integrating linguistic capabilities to the WA could revolutionize the way we interact with WAs (Yu et al., 2024).
Author contributions
HA: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Supervision, Validation, Visualization, Writing – original draft, Writing – review & editing. JH: Formal analysis, Investigation, Methodology, Validation, Visualization, Writing – original draft, Writing – review & editing. HM: Data curation, Formal analysis, Investigation, Methodology, Writing – original draft, Writing – review & editing. ME: Conceptualization, Funding acquisition, Investigation, Methodology, Resources, Supervision, Writing – original draft, Writing – review & editing.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This work was supported in part by the NYUAD Center for Artificial Intelligence and Robotics and the NYUAD Center for Brain and Health, funded by Tamkeen under the NYUAD Research Institute Awards, CG010 and CG012, respectively.
Acknowledgments
Authors also would like to thank Pi Ko, for his help in creating the framework's visualization.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abdi, E., Bouri, M., Himidan, S., Burdet, E., and Bleuler, H. (2016). “Third arm manipulation for surgical applications: an experimental study,” in New Trends in Medical and Service Robots: Assistive, Surgical and Educational Robotics, eds. H. Bleuler, M. Bouri, F. Mondada, D. Pisla, A. Rodic, and P. Helmer (Cham: Springer), 153–163. doi: 10.1007/978-3-319-23832-6_13
Aoyama, T., Shikida, H., Schatz, R., and Hasegawa, Y. (2019). Operational learning with sensory feedback for controlling a robotic thumb using the posterior auricular muscle. Adv. Robot. 33, 243–253. doi: 10.1080/01691864.2019.1566090
Araujo, R. S., Silva, C. R., Netto, S. P., Morya, E., and Brasil, F. L. (2021). Development of a low-cost EEG-controlled hand exoskeleton 3D printed on textiles. Front. Neurosci. 15:661569. doi: 10.3389/fnins.2021.661569
Bai, O., Kelly, G., Fei, D.-Y., Murphy, D., Fox, J., Burkhardt, B., et al. (2015). “A wireless, smart EEG system for volitional control of lower-limb prosthesis,” in TENCON 2015-2015 IEEE Region 10 Conference (Macao: IEEEE), 1–6. doi: 10.1109/TENCON.2015.7373060
Battye, C., Nightingale, A., and Whillis, J. (1955). The use of myo-electric currents in the operation of prostheses. J. Bone Joint Surg. Br. 37, 506–510. doi: 10.1302/0301-620X.37B3.506
Bitzer, S., and Van Der Smagt, P. (2006). “Learning EMG control of a robotic hand: towards active prostheses,” in Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006 (Orlando, FL: IEEE), 2819–2823. doi: 10.1109/ROBOT.2006.1642128
Cao, Y., and Huang, J. (2020). Neural-network-based nonlinear model predictive tracking control of a pneumatic muscle actuator-driven exoskeleton. IEEE/CAA J. Autom. Sin. 7, 1478–1488. doi: 10.1109/JAS.2020.1003351
Catalán, J. M., Trigili, E., Nann, M., Blanco-Ivorra, A., Lauretti, C., Cordella, F., et al. (2023). Hybrid brain/neural interface and autonomous vision-guided whole-arm exoskeleton control to perform activities of daily living (ADLS). J. Neuroeng. Rehabil. 20, 1–16. doi: 10.1186/s12984-023-01185-w
Cenit, M., and Gandhi, V. (2020). Design and development of the SEMG-based exoskeleton strength enhancer for the legs. J. Mechatron. Electr. Power Veh. Technol. 11, 64–74. doi: 10.14203/j.mev.2020.v11.64-74
Chen, R., Cohen, L., and Hallett, M. (2002). Nervous system reorganization following injury. Neuroscience 111, 761–773. doi: 10.1016/S0306-4522(02)00025-8
Chen, W., Lyu, M., Ding, X., Wang, J., and Zhang, J. (2023). Electromyography-controlled lower extremity exoskeleton to provide wearers flexibility in walking. Biomed. Signal Process. Control 79:104096. doi: 10.1016/j.bspc.2022.104096
Chen, Y., Yang, Z., and Wen, Y. (2021). A soft exoskeleton glove for hand bilateral training via surface EMG. Sensors 21:578. doi: 10.3390/s21020578
Cinel, C., Valeriani, D., and Poli, R. (2019). Neurotechnologies for human cognitive augmentation: current state of the art and future prospects. Front. Hum. Neurosci. 13:13. doi: 10.3389/fnhum.2019.00013
Cipriani, C., Segil, J. L., Clemente, F., Weir, R. F., and Edin, B. (2014). Humans can integrate feedback of discrete events in their sensorimotor control of a robotic hand. Exp. Brain Res. 232, 3421–3429. doi: 10.1007/s00221-014-4024-8
Cisnal, A., Gordaliza, P., Pérez Turiel, J., and Fraile, J. C. (2023). Interaction with a hand rehabilitation exoskeleton in EMG-driven bilateral therapy: influence of visual biofeedback on the users' performance. Sensors 23:2048. doi: 10.3390/s23042048
Ciullo, A. S., Catalano, M. G., Bicchi, A., and Ajoudani, A. (2019). “A supernumerary soft robotic hand-arm system for improving worker ergonomics,” Wearable Robotics: Challenges and Trends: Proceedings of the 4th International Symposium on Wearable Robotics, WeRob2018, October 16-20, 2018, Pisa, Italy 3 (Cham: Springer), 520–524. doi: 10.1007/978-3-030-01887-0_101
Clemente, F., Valle, G., Controzzi, M., Strauss, I., Iberite, F., Stieglitz, T., et al. (2019). Intraneural sensory feedback restores grip force control and motor coordination while using a prosthetic hand. J. Neural. Eng. 16:026034. doi: 10.1088/1741-2552/ab059b
Cohen, M. X. (2017). Where does EEG come from and what does it mean? Trends Neurosci. 40, 208–218. doi: 10.1016/j.tins.2017.02.004
Contreras-Vidal, J. L., and Grossman, R. G. (2013). “Neurorex: a clinical neural interface roadmap for EEG-based brain machine interfaces to a lower body robotic exoskeleton,” in 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Osaka: IEEE), 1579–1582. doi: 10.1109/EMBC.2013.6609816
Day, S. (2002). Important Factors in Surface EMG Measurement. Calgary, AB: Bortec Biomedical Ltd Publishers, 1–17.
Di Pino, G., Maravita, A., Zollo, L., Guglielmelli, E., and Di Lazzaro, V. (2014). Augmentation-related brain plasticity. Front. Syst. Neurosci. 8:109. doi: 10.3389/fnsys.2014.00109
Di Pino, G., Romano, D., Spaccasassi, C., Mioli, A., D'Alonzo, M., Sacchetti, V., et al. (2020). Sensory-and action-oriented embodiment of neurally-interfaced robotic hand prostheses. Front. Neurosci. 14:389. doi: 10.3389/fnins.2020.00389
Do, A. H., Wang, P. T., King, C. E., Chun, S. N., and Nenadic, Z. (2013). Brain-computer interface controlled robotic gait orthosis. J. Neuroeng. Rehabil. 10, 1–9. doi: 10.1186/1743-0003-10-111
Dominijanni, G., Shokur, S., Salvietti, G., Buehler, S., Palmerini, E., Rossi, S., et al. (2021). The neural resource allocation problem when enhancing human bodies with extra robotic limbs. Nat. Mach. Intell. 3, 850–860. doi: 10.1038/s42256-021-00398-9
Donati, A. R., Shokur, S., Morya, E., Campos, D. S., Moioli, R. C., Gitti, C. M., et al. (2016). Long-term training with a brain-machine interface-based gait protocol induces partial neurological recovery in paraplegic patients. Sci. Rep. 6:30383. doi: 10.1038/srep30383
Ebrahimi, A. (2017). “Stuttgart exo-jacket: an exoskeleton for industrial upper body applications,” in 2017 10th International Conference on Human System Interactions (HSI) (Ulsan: IEEE), 258–263. doi: 10.1109/HSI.2017.8005042
Eden, J., Bräcklein, M., Ibáñez, J., Barsakcioglu, D. Y., Di Pino, G., Farina, D., et al. (2022). Principles of human movement augmentation and the challenges in making it a reality. Nat. Commun. 13:1345. doi: 10.1038/s41467-022-28725-7
Elbert, T., Pantev, C., Wienbruch, C., Rockstroh, B., and Taub, E. (1995). Increased cortical representation of the fingers of the left hand in string players. Science 270, 305–307. doi: 10.1126/science.270.5234.305
Fan, Z., Lin, C., and Fu, C. (2020). “A gaze signal based control method for supernumerary robotic limbs,” in 2020 3rd International Conference on Control and Robots (ICCR) (Tokyo: IEEE), 107–111. doi: 10.1109/ICCR51572.2020.9344272
Ferrero, L., Quiles, V., Ortiz, M., Iáñez, E., and Azorín, J. M. (2021). A BMI based on motor imagery and attention for commanding a lower-limb robotic exoskeleton: a case study. Appl. Sci. 11:4106. doi: 10.3390/app11094106
Ferris, D. P., Gordon, K. E., Sawicki, G. S., and Peethambaran, A. (2006). An improved powered ankle-foot orthosis using proportional myoelectric control. Gait Posture 23, 425–428. doi: 10.1016/j.gaitpost.2005.05.004
Franco, L., Salvietti, G., and Prattichizzo, D. (2019). “Command acknowledge through tactile feedback improves the usability of an EMG-based interface for the frontalis muscle,” in 2019 IEEE World Haptics Conference (WHC) (Tokyo: IEEE), 574–579. doi: 10.1109/WHC.2019.8816133
García-Cossio, E., Severens, M., Nienhuis, B., Duysens, J., Desain, P., Keijsers, N., et al. (2015). Decoding sensorimotor rhythms during robotic-assisted treadmill walking for brain computer interface (BCI) applications. PLoS ONE 10:e0137910. doi: 10.1371/journal.pone.0137910
Garipelli, G., Chavarriaga, R., and del R Millán, J. (2013). Single trial analysis of slow cortical potentials: a study on anticipation related potentials. J. Neural Eng. 10:036014. doi: 10.1088/1741-2560/10/3/036014
Gordleeva, S. Y., Lobov, S. A., Grigorev, N. A., Savosenkov, A. O., Shamshin, M. O., Lukoyanov, M. V., et al. (2020). Real-time EEG-EMG human-machine interface-based control system for a lower-limb exoskeleton. IEEE Access 8, 84070–84081. doi: 10.1109/ACCESS.2020.2991812
Gordon, K. E., and Ferris, D. P. (2007). Learning to walk with a robotic ankle exoskeleton. J. Biomech. 40, 2636–2644. doi: 10.1016/j.jbiomech.2006.12.006
Guerrero, G., da Silva, F. J. M., Fernández-Caballero, A., and Pereira, A. (2022). Augmented humanity: a systematic mapping review. Sensors 22, 514. doi: 10.3390/s22020514
Guger, C., Harkam, W., Hertnaes, C., and Pfurtscheller, G. (1999). “Prosthetic control by an eeg-based brain-computer interface (BCI),” in Proc. AAATE 5th European conference for the advancement of assistive technology (Princeton, NJ: Citeseer), 3–6.
Guggenheim, J. W., Parietti, F., Flash, T., and Asada, H. H. (2020). Laying the groundwork for intra-robotic-natural limb coordination: is fully manual control viable? ACM Trans. Hum.-Robot Interact. 9, 1–12. doi: 10.1145/3377329
Gui, K., Liu, H., and Zhang, D. (2017). Toward multimodal human-robot interaction to enhance active participation of users in gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 25, 2054–2066. doi: 10.1109/TNSRE.2017.2703586
Guo, Y., Xu, W., Pradhan, S., Bravo, C., and Ben-Tzvi, P. (2022). Personalized voice activated grasping system for a robotic exoskeleton glove. Mechatronics 83:102745. doi: 10.1016/j.mechatronics.2022.102745
Hensch, T. K. (2005). Critical period plasticity in local cortical circuits. Nat. Rev. Neurosci. 6, 877–888. doi: 10.1038/nrn1787
Hocoma (2023). Hocoma Solutions. Available at: https://www.hocoma.com/us/solutions/lokomat/ (accessed December 8, 2023).
Horn, G. (1972). Electro-control: am EMG-controlled a/k prosthesis. Med. Biol. Eng. 10, 61–73. doi: 10.1007/BF02474569
Hussain, I., Salvietti, G., Spagnoletti, G., Malvezzi, M., Cioncoloni, D., Rossi, S., et al. (2017a). A soft supernumerary robotic finger and mobile arm support for grasping compensation and hemiparetic upper limb rehabilitation. Rob. Auton. Syst. 93, 1–12. doi: 10.1016/j.robot.2017.03.015
Hussain, I., Salvietti, G., Spagnoletti, G., and Prattichizzo, D. (2016a). The soft-sixthfinger: a wearable EMG controlled robotic extra-finger for grasp compensation in chronic stroke patients. IEEE Robot. Autom. Lett. 1, 1000–1006. doi: 10.1109/LRA.2016.2530793
Hussain, I., Spagnoletti, G., Salvietti, G., and Prattichizzo, D. (2016b). An EMG interface for the control of motion and compliance of a supernumerary robotic finger. Front. Neurorobot. 10:18. doi: 10.3389/fnbot.2016.00018
Hussain, I., Spagnoletti, G., Salvietti, G., and Prattichizzo, D. (2017b). Toward wearable supernumerary robotic fingers to compensate missing grasping abilities in hemiparetic upper limb. Int. J. Rob. Res. 36, 1414–1436. doi: 10.1177/0278364917712433
Jeon, B.-I., Cho, H.-C., and Jeon, H.-T. (2012). The implementation of the intelligent exoskeleton robot arm using electromiogram (EMG) vital signal. J. Korean Inst. Intell. Syst. 22, 533–539. doi: 10.5391/JKIIS.2012.22.5.533
Karni, A., Meyer, G., Rey-Hipolito, C., Jezzard, P., Adams, M. M., Turner, R., et al. (1998). The acquisition of skilled motor performance: fast and slow experience-driven changes in primary motor cortex. Proc. Nat. Acad. Sci. 95, 861–868. doi: 10.1073/pnas.95.3.861
Kawamoto, H., and Sankai, Y. (2001). “EMG-based hybrid assistive leg for walking aid using feedforward controller,” in Proceedings of the International Conference on Control, Automation and Systems, 190–193.
Kawase, T., Sakurada, T., Koike, Y., and Kansaku, K. (2017). A hybrid BMI-based exoskeleton for paresis: EMG control for assisting arm movements. J. Neural Eng. 14:016015. doi: 10.1088/1741-2552/aa525f
Kazerooni, H. (2008). “A review of the exoskeleton and human augmentation technology,” in Dynamic Systems and Control Conference, Volume 43352, 1539–1547. doi: 10.1115/DSCC2008-2407
Khazoom, C., Caillouette, P., Girard, A., and Plante, J.-S. (2020). A supernumerary robotic leg powered by magnetorheological actuators to assist human locomotion. IEEE Robot. Autom. Lett. 5, 5143–5150. doi: 10.1109/LRA.2020.3005629
Kieliba, P., Clode, D., Maimon-Mor, R. O., and Makin, T. R. (2021). Robotic hand augmentation drives changes in neural body representation. Sci. Robot. 6:eabd7935. doi: 10.1126/scirobotics.abd7935
Kiguchi, K., and Hayashi, Y. (2012). An EMG-based control for an upper-limb power-assist exoskeleton robot. IEEE Trans. Syst. Man. Cybern. B Cybern. 42, 1064–1071. doi: 10.1109/TSMCB.2012.2185843
Kilicarslan, A., Prasad, S., Grossman, R. G., and Contreras-Vidal, J. L. (2013). “High accuracy decoding of user intentions using EEG to control a lower-body exoskeleton,” in 2013 35th annual international conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Osaka: IEEE), 5606–5609. doi: 10.1109/EMBC.2013.6610821
Kim, J., Lee, G., Heimgartner, R., Arumukhom Revi, D., Karavas, N., Nathanson, D., et al. (2019). Reducing the metabolic rate of walking and running with a versatile, portable exosuit. Science 365, 668–672. doi: 10.1126/science.aav7536
Kojima, A., Yamazoe, H., Chung, M. G., and Lee, J.-H. (2017). “Control of wearable robot arm with hybrid actuation system,” in 2017 IEEE/SICE International Symposium on System Integration (SII) (Taipei: IEEE), 1022–1027. doi: 10.1109/SII.2017.8279357
Koller, J. R., Jacobs, D. A., Ferris, D. P., and Remy, C. D. (2015). Learning to walk with an adaptive gain proportional myoelectric controller for a robotic ankle exoskeleton. J. Neuroeng. Rehabil. 12, 1–14. doi: 10.1186/s12984-015-0086-5
Kwak, N.-S., Müller, K.-R., and Lee, S.-W. (2015). A lower limb exoskeleton control system based on steady state visual evoked potentials. J. Neural Eng. 12:056009. doi: 10.1088/1741-2560/12/5/056009
Lee, J., Kwon, K., Soltis, I., Matthews, J., Lee, Y., Kim, H., et al. (2023). Intelligent upper-limb exoskeleton using deep learning to predict human intention for sensory-feedback augmentation. arXiv [Preprint]. arXiv:2309.04655. doi: 10.48550/arXiv.2309.04655
Lee, K., Liu, D., Perroud, L., Chavarriaga, R., and Millán, J. R. (2017). A brain-controlled exoskeleton with cascaded event-related desynchronization classifiers. Rob. Auton. Syst. 90, 15–23. doi: 10.1016/j.robot.2016.10.005
Leigh, S.-w., and Maes, P. (2016). “Body integrated programmable joints interface,” in Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (New York, NY: ACM), 6053–6057. doi: 10.1145/2858036.2858538
Lim, B., Jang, J., Lee, J., Choi, B., Lee, Y., Shim, Y., et al. (2019). Delayed output feedback control for gait assistance and resistance using a robotic exoskeleton. IEEE Robot. Autom. Lett. 4, 3521–3528. doi: 10.1109/LRA.2019.2927937
Liu, Y., Huang, S., Wang, Z., Ji, F., and Ming, D. (2021). “A novel modular and wearable supernumerary robotic finger via EEG-EMG control with 4-week training assessment,” in Intelligent Robotics and Applications: 14th International Conference, ICIRA 2021, Yantai, China, October 22-25, 2021, Proceedings, Part I 14 (Cham: Springer), 748–758. doi: 10.1007/978-3-030-89095-7_71
Liu, Y., Wang, Z., Huang, S., Wang, W., and Ming, D. (2022). EEG characteristic investigation of the sixth-finger motor imagery and optimal channel selection for classification. J. Neural Eng. 19:016001. doi: 10.1088/1741-2552/ac49a6
López-Larraz, E., Trincado-Alonso, F., Rajasekaran, V., Pérez-Nombela, S., Del-Ama, A. J., Aranda, J., et al. (2016). Control of an ambulatory exoskeleton with a brain-machine interface for spinal cord injury gait rehabilitation. Front. Neurosci. 10:359. doi: 10.3389/fnins.2016.00359
Lotti, N., Xiloyannis, M., Durandau, G., Galofaro, E., Sanguineti, V., Masia, L., et al. (2020). Adaptive model-based myoelectric control for a soft wearable arm exosuit: a new generation of wearable robot control. IEEE Robot. Autom. Mag. 27, 43–53. doi: 10.1109/MRA.2019.2955669
Lower Limb HAL. (2023). Robots Guide. Available at: https://www.cyberdyne.jp/english/products/LowerLimb_medical.html (accessed December 8, 2023).
Luck, S. J. (2014). An Introduction to the Event-Related Potential Technique. Cambridge, MA: MIT press.
Maintained, S. F. E. S. D. (2009). A myokinetic arm model for estimating joint torque. J. Neurophysiol. 101, 387–401. doi: 10.1152/jn.00584.2007
Mäki, H., and Ilmoniemi, R. J. (2011). Projecting out muscle artifacts from TMS-evoked EEG. Neuroimage 54, 2706–2710. doi: 10.1016/j.neuroimage.2010.11.041
McDonald, C. G., Dennis, T. A., and O'Malley, M. K. (2017). Characterization of surface electromyography patterns of healthy and incomplete spinal cord injury subjects interacting with an upper-extremity exoskeleton. IEEE Int. Conf. Rehabil. Robot. 2017164–169. doi: 10.1109/ICORR.2017.8009240
Meng, L., and Hu, X. (2024). Unsupervised neural decoding for concurrent and continuous multi-finger force prediction. Comput. Biol. Med. 173:108384. doi: 10.1016/j.compbiomed.2024.108384
Meraz, N. S., Shikida, H., and Hasegawa, Y. (2017). “Auricularis muscles based control interface for robotic extra thumb,” in 2017 International Symposium on Micro-NanoMechatronics and Human Science (MHS) (Nagoya: IEEE), 1–3. doi: 10.1109/MHS.2017.8305192
Merletti, R., and Farina, D. (2016). Surface Electromyography: Physiology, Engineering, and Applications. Hoboken, NJ: John Wiley & Sons. doi: 10.1002/9781119082934
Muijzer-Witteveen, H., Sibum, N., van Dijsseldonk, R., Keijsers, N., and van Asseldonk, E. (2018). Questionnaire results of user experiences with wearable exoskeletons and their preferences for sensory feedback. J. Neuroeng. Rehabil. 15, 1–8. doi: 10.1186/s12984-018-0445-0
Nguyen, P. H., Sparks, C., Nuthi, S. G., Vale, N. M., and Polygerinos, P. (2019). Soft poly-limbs: toward a new paradigm of mobile manipulation for daily living tasks. Soft Robot. 6, 38–53. doi: 10.1089/soro.2018.0065
Niedermeyer, E., and da Silva, F. L. (2005). Electroencephalography: Basic Principles, Clinical Applications, and Related Fields. Philadelphia, PA: Lippincott Williams & Wilkins.
Noda, T., Sugimoto, N., Furukawa, J., Sato, M.-a., Hyon, S.-H., and Morimoto, J. (2012). “Brain-controlled exoskeleton robot for BMI rehabilitation,” in 2012 12th IEEE-RAS international conference on humanoid robots (humanoids 2012) (Osaka: IEEE), 21–27. doi: 10.1109/HUMANOIDS.2012.6651494
Nuckols, R. W., Dick, T. J., Beck, O. N., and Sawicki, G. S. (2020). Ultrasound imaging links soleus muscle neuromechanics and energetics during human walking with elastic ankle exoskeletons. Sci. Rep. 10:3604. doi: 10.1038/s41598-020-60360-4
Nunez, P. L., and Srinivasan, R. (2006). Electric Fields of the Brain: the Neurophysics of EEG. Oxford: Oxford University Press. doi: 10.1093/acprof:oso/9780195050387.001.0001
Oertelt, N., Arabian, A., Brugger, E. C., Choros, M., Farahany, N. A., Payne, S., et al. (2017). Human by design: an ethical framework for human augmentation. IEEE Technol. Soc. Mag. 36, 32–36. doi: 10.1109/MTS.2017.2654286
Page, D., George, J., Kluger, D., Duncan, C., Wendelken, S., Davis, T., et al. (2018). Motor control and sensory feedback enhance prosthesis embodiment and reduce phantom pain after long-term hand amputation. Front. Hum. Neurosci. 12:352. doi: 10.3389/fnhum.2018.00352
Parietti, F., and Asada, H. H. (2014). “Supernumerary robotic limbs for aircraft fuselage assembly: body stabilization and guidance by bracing,” in 2014 IEEE International Conference on Robotics and Automation (ICRA) (Hong Kong: IEEE), 1176–1183. doi: 10.1109/ICRA.2014.6907002
Parietti, F., and Asada, H. H. (2017). “Independent, voluntary control of extra robotic limbs,” in 2017 IEEE International Conference on Robotics and Automation (ICRA) (Sigapore: IEEE), 5954–5961. doi: 10.1109/ICRA.2017.7989702
Park, S., Fraser, M., Weber, L. M., Meeker, C., Bishop, L., Geller, D., et al. (2020). User-driven functional movement training with a wearable hand robot after stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 28, 2265–2275. doi: 10.1109/TNSRE.2020.3021691
Pascual-Leone, A., Nguyet, D., Cohen, L. G., Brasil-Neto, J. P., Cammarota, A., Hallett, M., et al. (1995). Modulation of muscle responses evoked by transcranial magnetic stimulation during the acquisition of new fine motor skills. J. Neurophysiol. 74, 1037–1045. doi: 10.1152/jn.1995.74.3.1037
Pearce, A. J., Thickbroom, G. W., Byrnes, M. L., and Mastaglia, F. L. (2000). Functional reorganisation of the corticomotor projection to the hand in skilled racquet players. Exp. Brain Res. 130, 238–243. doi: 10.1007/s002219900236
Penaloza, C., Hernandez-Carmona, D., and Nishio, S. (2018). “Towards intelligent brain-controlled body augmentation robotic limbs,” in 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC) (Miyazaki: IEEE), 1011–1015. doi: 10.1109/SMC.2018.00180
Penaloza, C. I., and Nishio, S. (2018). BMI control of a third arm for multitasking. Sci. Robot. 3:eaat1228. doi: 10.1126/scirobotics.aat1228
Pfurtscheller, G., and Neuper, C. (2001). Motor imagery and direct brain-computer communication. Proc. IEEE 89, 1123–1134. doi: 10.1109/5.939829
Pinardi, M., Longo, M. R., Formica, D., Strbac, M., Mehring, C., Burdet, E. G., et al. (2023). Impact of supplementary sensory feedback on the control and embodiment in human movement augmentation. Commun. Eng. 2:64. doi: 10.1038/s44172-023-00111-1
Polich, J. (2007). Updating p300: an integrative theory of p3a and p3b. Clin. Neurophysiol. 118, 2128–2148. doi: 10.1016/j.clinph.2007.04.019
Prattichizzo, D., Malvezzi, M., Hussain, I., and Salvietti, G. (2014). “The sixth-finger: a modular extra-finger to enhance human hand capabilities,” in The 23rd IEEE International Symposium on Robot and Human Interactive Communication (Edinburgh: IEEE), 993–998. doi: 10.1109/ROMAN.2014.6926382
Prattichizzo, D., Pozzi, M., Baldi, T. L., Malvezzi, M., Hussain, I., Rossi, S., et al. (2021). Human augmentation by wearable supernumerary robotic limbs: review and perspectives. Progr. Biomed. Eng. 3:042005. doi: 10.1088/2516-1091/ac2294
Rechy-Ramirez, E. J., and Hu, H. (2011). Stages for Developing Control Systems using EMG and EEG Signals: A Survey. Colchester: School of Computer Science and Electronic Engineering, University of Essex, 1744–8050.
Regan, D. (1966). Some characteristics of average steady-state and transient responses evoked by modulated light. Electroencephalogr. Clin. Neurophysiol. 20, 238–248. doi: 10.1016/0013-4694(66)90088-5
Rex Bionics (2023). Rex Bionics. Available at: https://www.rexbionics.com (accessed December 8, 2023).
Salvietti, G., Hussain, I., Cioncoloni, D., Taddei, S., Rossi, S., Prattichizzo, D., et al. (2016). Compensating hand function in chronic stroke patients through the robotic sixth finger. IEEE Trans. Neural Syst. Rehabil. Eng. 25, 142–150. doi: 10.1109/TNSRE.2016.2529684
Schomer, D. L., and Da Silva, F. L. (2012). Niedermeyer's Electroencephalography: Basic Principles, Clinical Applications, and Related Fields. Philadelphia, PA: Lippincott Williams & Wilkins.
Sensinger, J. W., and Dosen, S. (2020). A review of sensory feedback in upper-limb prostheses from the perspective of human motor control. Front. Neurosci. 14:519626. doi: 10.3389/fnins.2020.00345
Shadmehr, R., and Mussa-Ivaldi, S. (2012). Biological Learning and Control: How the Brain Builds Representations, Predicts Events, and Makes Decisions. Cambridge, MA: MIT Press. doi: 10.7551/mitpress/9780262016964.001.0001
Shikida, H., Noel, S.-M., and Hasegawa, Y. (2017). “Somatosensory feedback improves operability of extra robotic thumb controlled by vestigial muscles,” in 2017 International Symposium on Micro-NanoMechatronics and Human Science (MHS) (Nagoya: IEEE), 1–4. doi: 10.1109/MHS.2017.8305217
Siegel, M., Donner, T. H., and Engel, A. K. (2012). Spectral fingerprints of large-scale neuronal interactions. Nat. Rev. Neurosci. 13, 121–134. doi: 10.1038/nrn3137
Single Joint HAL. (2023). Robots Guide. Available at: https://www.cyberdyne.jp/english/products/SingleJoint_medical.html (accessed December 8, 2023).
Siviy, C., Baker, L. M., Quinlivan, B. T., Porciuncula, F., Swaminathan, K., Awad, L. N., et al. (2023). Opportunities and challenges in the development of exoskeletons for locomotor assistance. Nat. Biomed. Eng. 7, 456–472. doi: 10.1038/s41551-022-00984-1
Spiewak, C., Islam, M., Zaman, A., Rahman, M. H., et al. (2018). A comprehensive study on EMG feature extraction and classifiers. Open Access J. Biomed. Eng. Biosci. 1, 1–10. doi: 10.32474/OAJBEB.2018.01.000104
Strijkstra, A. M., Beersma, D. G., Drayer, B., Halbesma, N., and Daan, S. (2003). Subjective sleepiness correlates negatively with global alpha (8-12 Hz) and positively with central frontal theta (4-8 Hz) frequencies in the human resting awake electroencephalogram. Neurosci. Lett. 340, 17–20. doi: 10.1016/S0304-3940(03)00033-8
Tang, Z., Zhang, L., Chen, X., Ying, J., Wang, X., Wang, H., et al. (2022). Wearable supernumerary robotic limb system using a hybrid control approach based on motor imagery and object detection. IEEE Trans. Neural Syst. Rehabil. Eng. 30, 1298–1309. doi: 10.1109/TNSRE.2022.3172974
Tong, Y., and Liu, J. (2021). Review of research and development of supernumerary robotic limbs. IEEE/CAA J. Autom. Sin. 8, 929–952. doi: 10.1109/JAS.2021.1003961
Treers, L., Lo, R., Cheung, M., Guy, A., Guggenheim, J., Parietti, F., et al. (2017). “Design and control of lightweight supernumerary robotic limbs for sitting/standing assistance,” in 2016 International Symposium on Experimental Robotics (Cham: Springer), 299–308. doi: 10.1007/978-3-319-50115-4_27
Treussart, B., Geffard, F., Vignais, N., and Marin, F. (2020). “Controlling an upper-limb exoskeleton by EMG signal while carrying unknown load,” in 2020 IEEE International Conference on Robotics and Automation (ICRA) (Paris: IEEE), 9107–9113. doi: 10.1109/ICRA40945.2020.9197087
Wright, D. J., Holmes, P. S., and Smith, D. (2011). Using the movement-related cortical potential to study motor skill learning. J. Mot. Behav. 43, 193–201. doi: 10.1080/00222895.2011.557751
Wu, F. Y., and Asada, H. H. (2018). “Decoupled motion control of wearable robot for rejecting human induced disturbances,” in 2018 IEEE International Conference on Robotics and Automation (ICRA) (Brisbane, QLD: IEEE), 4103–4110. doi: 10.1109/ICRA.2018.8461109
Yang, B., Huang, J., Chen, X., Xiong, C., and Hasegawa, Y. (2021). Supernumerary robotic limbs: a review and future outlook. IEEE Trans. Med. Robot. Bionics 3, 623–639. doi: 10.1109/TMRB.2021.3086016
Yang, S., Li, M., Wang, J., Shi, Z., He, B., Xie, J., et al. (2023). A low-cost and portable wrist exoskeleton using EEG-SEMG combined strategy for prolonged active rehabilitation. Front. Neurorobot. 17:1161187. doi: 10.3389/fnbot.2023.1161187
Yu, S., Lin, K., Xiao, A., Duan, J., and Soh, H. (2024). Octopi: object property reasoning with large tactile-language models. arXiv [Preprint]. arXiv:2405.02794. doi: 10.48550/arXiv.2405.02794
Zecca, M., Micera, S., Carrozza, M. C., and Dario, P. (2002). Control of multifunctional prosthetic hands by processing the electromyographic signal. Crit. Rev. Biomed. Eng. 30, 459–485. doi: 10.1615/CritRevBiomedEng.v30.i456.80
Zhang, J., Vanderbilt, D., Fitz, E., and Dong, J. (2019). “EMG controlled soft robotic bicep augmentation,” in ASME International Mechanical Engineering Congress and Exposition, Volume 59407 (American Society of Mechanical Engineers). doi: 10.1115/IMECE2019-11716
Keywords: wearable augmentation, electroencephalography, electromyography, sensory feedback, embodiment
Citation: Alsuradi H, Hong J, Mazi H and Eid M (2024) Neuro-motor controlled wearable augmentations: current research and emerging trends. Front. Neurorobot. 18:1443010. doi: 10.3389/fnbot.2024.1443010
Received: 03 June 2024; Accepted: 15 October 2024;
Published: 31 October 2024.
Edited by:
Chenyun Dai, Shanghai Jiao Tong University, ChinaReviewed by:
Wei Wang, Nankai University, ChinaLong Meng, The Pennsylvania State University (PSU), United States
Copyright © 2024 Alsuradi, Hong, Mazi and Eid. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mohamad Eid, bW9oYW1hZC5laWRAbnl1LmVkdQ==