 Julian Duran-Gonzalez
Julian Duran-Gonzalez Alejandro Campos-Muñoz
Alejandro Campos-Muñoz Victor-Hugo Sanchez-Espinoza
Victor-Hugo Sanchez-Espinoza- Karlsruhe Institute of Technology (KIT), Institute for Neutron Physics and Reactor Technology (INR), Karlsruhe, Germany
For practical reactor analysis, a low-order transport approximation such as simplified spherical harmonics (SPN) has become widely used due to its improved accuracy over diffusion and lower computational cost compared to spherical harmonics (PN) and discrete-ordinate (SN) methods. This paper introduces and verifies KANECS, a new neutronic solver that employs the SPN approximation and continuous Galerkin finite-element method (CGFEM) for angular and spatial discretization respectively, to solve the 3D steady-state multigroup neutron transport equation in Cartesian geometry. For the numerical verification, the KAIST and C5G7 benchmarks were selected. The results show that KANECS predicts with promising accuracy the keff and power distribution, fairly close to the ones of transport approach. Consequently, KANECS demonstrates that it can effectively perform a pin-by-pin core analysis.
1 Introduction
For nuclear reactor analysis, it is fundamental to determine the power distribution throughout the whole core (not only at the fuel assembly but also at the pin level), which is proportional to the neutron flux distribution. The Boltzmann neutron transport equation (BTE) (Lewis and Miller, 1993) describes the neutron distribution and movement within a reactor core. Unfortunately, reaching an analytical solution is only feasible for academic problems. Therefore, modern numerical approaches are employed to approximate the solution accurately. There are two main methodologies to solve BTE, each one with advantages and drawbacks. The first one is the stochastic method, such as the Monte Carlo approach, which has the advantage of treating very complex 3D geometries almost without incorporating approximations. Moreover, it does not require the preparation of problem-dependent macroscopic cross section data. Finally, the continuous treatment of neutron’s energy, as well as space angle, does not contain phase-space discretization, making it entirely accurate to carry a high-fidelity model, yet at high computational costs and statistical uncertainties. Hence, the time-dependent simulations are only possible for fast transients lasting a few seconds, even when using a massively parallel high-performance computing environment (Ferraro et al., 2020). An alternative approach is the deterministic method, which involves discretizing the seven independent variables and solving them numerically as a set of algebraic equations. Although truncation errors occur due to discretization schemes, deterministic methods are less computationally expensive but require the generation of problem-dependent macroscopic cross section data, however, for the time being, are more practical to simulate transients.
Referring to deterministic methods, they can be classified according to their angular discretization (Azmy and Sartori, 2010). These methods include the spherical harmonics method (PN), discrete-ordinates method (SN), and method of characteristics (MoC). However, each method has its own drawbacks. For instance, the PN method can become complicated due to a significant increase in the number of unknowns for a 3D geometry. The SN method suffers from the ray effect, and MoC requires many iterative transport sweeps, leading to slow convergence. In general, to overcome the shortcomings of each method, a massively parallel implementation and an acceleration scheme are needed. Nevertheless, for a practical whole-core reactor analysis, low-order approximations are popular since they significantly reduce the computing time.
The most well-known method is the diffusion approximation, which is generally used in coarse mesh calculations. The fundamental assumption in diffusion is that the neutron flux varies slowly in space and that scattering is isotropic. Therefore, it is usually restricted to an optically thick system where scattering reactions are dominant. As a result, the diffusion approximation is accurate in a typical large commercial nuclear reactor core where spatial gradients are not extremely large and with low-neutron absorption media. On the other hand, diffusion may not be accurate near strong absorbers (poison and control rods) or material interfaces, such as at the fuel assembly boundaries of UOX and MOX. It is worth noting that new designs, such as Small Modular Reactors (SMRs), are characterized by a highly heterogeneous core, a harder spectrum, and high neutron leakage due to their compactness. Thus, a core analysis with diffusion approximation may not be sufficient to describe adequately the high heterogeneity in the radial and axial directions.
In recent years, the simplified spherical harmonics approximation (SPN) (Hamilton and Evans, 2015) has become widely used as an alternative to diffusion. The SPN method offers improved accuracy over diffusion by capturing some transport effects while also requiring less computational time than SN or PN approximations. Initially proposed by (Gelbard, 1960), the SPN method is obtained by extending the one-dimensional PN equations, formally replacing the total derivatives with a divergence for the even equations and a gradient for the odd ones. Additionally, the SPN method for slab geometry is equivalent to the PN method, but for 3D geometry, it is less accurate but much easier to solve than its counterpart. It is also important to mention that the SPN method does not converge to the exact transport solution as N
Recently, numerous neutronic solvers have been developed using the multigroup SPN approximation, such as DYN3D (Beckert and Grundmann, 2008), TRIVAC (Hébert, 2010), SPNDYN (Babcsány et al., 2022), FEMFFUSION (Fontenla et al., 2024), FENNECS (Lo Muzio and Seubert, 2024), and AZNHEX (Muñoz-Peña et al., 2023). Most of these solvers implement a finite-element approximation or nodal method, which provides stability and accuracy. Thus, encouraged by these references, a new neutronic solver known as KANECS (Karlsruhe neutronics core simulator) has been developed using the SPN approximation and the Continuous Galerkin Finite-Element Method (CGFEM) (Zienkiewicz et al., 2005).
This work focuses on the detailed description, implementation, and verification of KANECS. For the verification, challenging benchmarks were selected to test the code’s capability and then compared against other neutron transport approaches that have already been verified with Monte Carlo reference results, which is mandatory for evaluating the accuracy of any deterministic method. The paper is structured as follows: Section 2 introduces the SPN equations and their spatial discretization, while Section 3 focuses on KANECS’s main features. Then, the numerical results and analysis are presented in Section 4. Finally, the concluding remarks and outlook are summarized in Section 5.
2 SPN equations and their spatial discretization
The derivation of the steady-state SPN equations starts from the one-dimensional multi-group neutron transport equation (Lewis and Miller Jr, 1993),
where
Subsequently, the angular flux and scattering cross section can be expanded in terms of Legendre polynomials as:
In this case,
where
Thus, Equations 3a, 3b compose a set of N+1 equations. For simplification, this work considers the scattering components’ moments with
The 3D simplified PN equations are derived by replacing the total derivatives with the divergence operator for the even equations and a gradient operator for the odd ones. This formulation results in (N+1)/2 diffusion-like equations (elliptic, second-order) after eliminating the odd moment’s terms. As a result, the set of SP7 equations is given in Equation 5:
In the context of performing operations on a single unknown in each moment equation, an introduced variable change
Afterward, by substituting the Equation 6 into the set of SPN equations and after an appropriate reordering, the following system form Equation 7 is achieved:
where
For the SPN equations, the Marshak boundary conditions are typically employed to represent the vacuum boundary condition, which can be expressed in Equation 12 as follows:
where
Lastly, reflective boundary conditions are imposed following (Hamilton and Evans, 2015), leading to Equation 14:
More detailed information on the derivation of the SPN equations and the vacuum and reflective boundary conditions can be found in the following references (Hamilton and Evans, 2015; Fontenla et al., 2024).
Regarding spatial discretization, the continuos Galerkin finite-element method (CGFEM) (Zienkiewicz et al., 2005) is employed since it is a well-established method offering numerical stability and straightforward implementation. In this approach, the neutron flux
For example, by replacing the basis functions from
As a consequence Equation 7 can be constructed in matrix-block form using the operators
where
Finally, this weak form formulation leads to an algebraic eigenvalue linear system Equation 18, which KANECS solves using numerical software libraries.
3 KANECS description
KANECS (Karlsruhe Neutronics Core Simulator) is a deterministic multigroup neutron transport solver being developed by the Karlsruhe Institute for Technology (KIT). It is based on the SPN transport equations and the continuous Galerkin finite-element method (CGFEM). At present, it can only handle steady-state calculations in Cartesian geometry with isotropic scattering. The code is written in hybrid Modern Fortran and C++ languages. Additionally, it incorporates various numerical libraries to assist the iterative calculations for solving Equation 18.
One of the main libraries used is deal. II (Arndt et al., 2023), an open-source finite element library, which offers a comprehensive framework for the solving elliptic and parabolic partial differential equations (PDEs) found in the SPN formulation. This library provides a wide range of features, including various finite element types such as Lagrange, Nedelec, and Raviart-Thomas elements, as well as more advanced types like discontinuous Galerkin elements.
Then, the Portable, Extensible Toolkit for Scientific Computation (PETSc) (Balay et al., 2024) is employed for the linear system solution since it provides a comprehensive suite of data structures and routines. Particularly, PETSc provides a flexible and efficient way to handle vectors and supports multiple matrices formats (CSR and matrix-free), which is essential for large-scale scientific computation. Moreover, it includes a wide range of iterative solvers, such as the generalized minimal residual method (GMRES) and the biconjugate gradient stabilized method (Bi-CGStab), along with preconditioning techniques like incomplete LU factorization (ILU) and Incomplete Cholesky factorization (ICC) to enhance convergence speed.
Lastly, the Scalable Library for Eigenvalue Problem Computations (SLEPc) (Roman et al., 2024) is used to solve eigenvalue problems, specifically to determine the multiplication factor (largest eigenvalue) and its corresponding eigenvector (neutron flux) that satisfy Equation 18. SLEPc is developed on top of the PETSc library, using its data structures and solvers to create a comprehensive framework for eigenvalue calculations. Besides, SLEPc provides a variety of linear eigensolvers, including the Power and Krylov-Schur methods.
It is worth noting that the selection of these libraries offers a powerful tool for solving the SPN equations due to their dedicated user and developer communities, guaranteeing consistent support and continuous ongoing enhancements. Furthermore, they are designed to be compatible with parallel computing environments, such as the Message Passing Interface (MPI) and the Compute Unified Device Architecture platform (CUDA), which are crucial for solving large-scale simulations efficiently.
The KANECS calculation scheme is as follows: firstly, the input file containing the geometry, neutron cross sections, and convergence criteria is read. Subsequently, the deal. II library handles the discretization by employing the weak form of the SPN equations and the continuous Galerkin method. As a result, it provides quadrature points, shape function values, and gradients. For each cell, deal. II computes the global indices and the elemental local matrix, which will be assembled into the
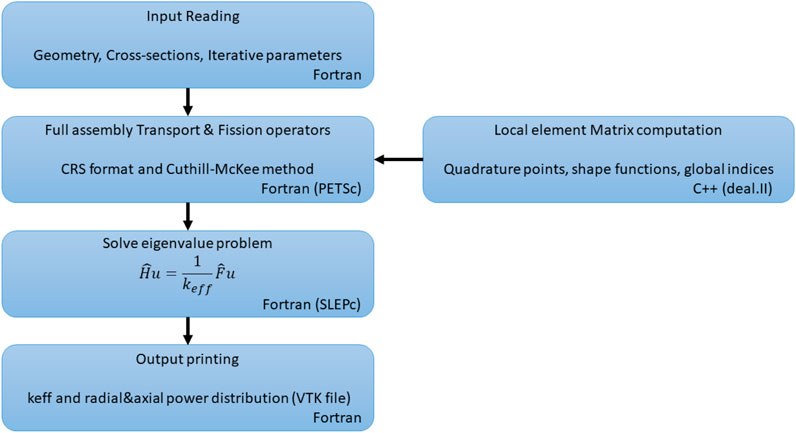
Figure 1. KANECS calculation scheme.
4 Numerical results
In this section, the KAIST (Cho, 2000) and C5G7 (Lewis et al., 2003) benchmarks are simulated to verify the KANECS’ capabilities. For verification, the computational results are compared using other deterministic neutron transport codes, PARAFISH (PN) (Duran-Gonzalez et al., 2022) and AZTRAN (SN) (Duran-Gonzalez et al., 2021) employing the same conditions (geometry, cross sections, and convergence criteria). In order to conduct a comprehensive code-to-code comparison, the following collective relative error measures are used: the
Finally, all the calculations were performed with convergence criteria set to
4.1 KAIST 3A benchmark
The KAIST 3A benchmark features a simplified Pressurised Water Reactor (PWR) with a MOX-loaded core, it is part of a series developed by the KAIST Nuclear Reactor Analysis and Particle Transport Laboratory (Cho, 2000). The core comprises two types of fuel assemblies: UOX (UOX-1 with 2.0% enrichment and UOX-2 with 3.3% enrichment) and MOX. A reflector and a steel baffle surround the fuel assemblies. Each assembly constitutes a 17 × 17 lattice design with a width of 21.42 cm and a pin-cell pitch of 1.26 cm. This benchmark provides 7-group pin-cell homogenized cross sections (Cho, 2000) based on the HELIOS 34 group structure, including UOX, MOX, guide tubes, fuel rods, control rods, poison rods, a baffle, and a reflector. The core layout of the KAIST 3A benchmark is illustrated in Figure 2.
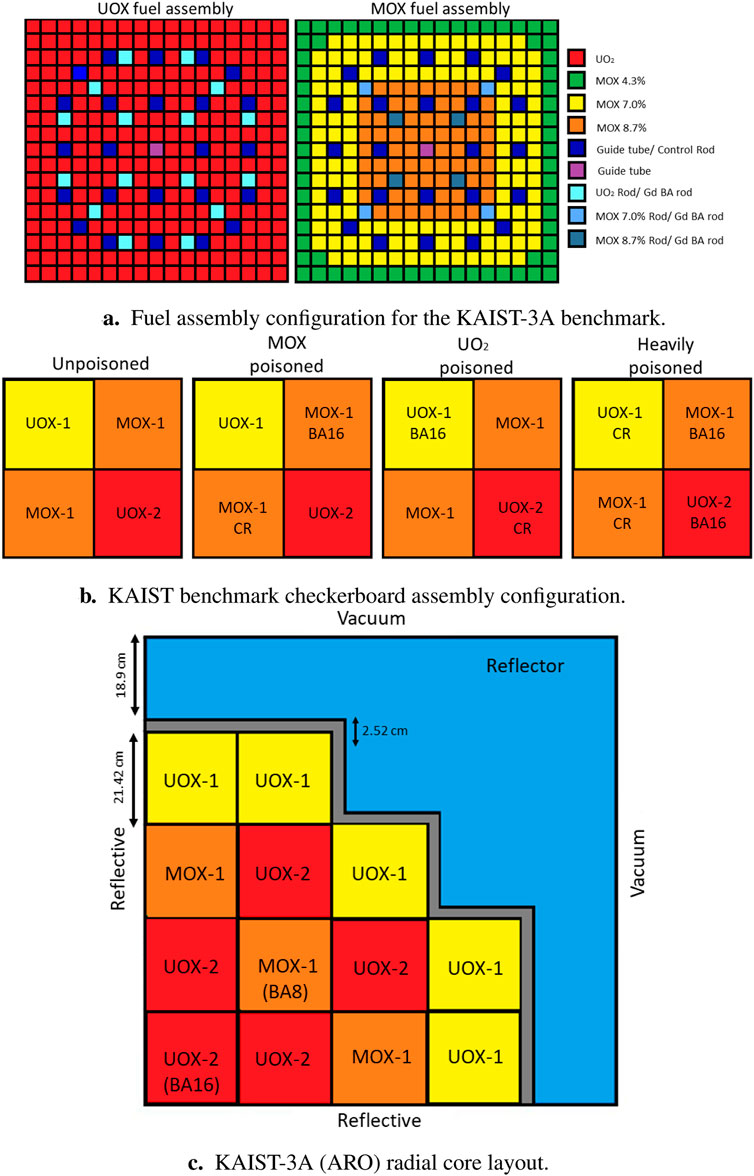
Figure 2. KAIST-3A benchmark geometry. (A) Fuel assembly configuration for the KAIST-3A benchmark. (B) KAIST benchmark checkerboard assembly configuration. (C) KAIST-3A (ARO) radial core layout.
4.1.1 KAIST 3A assembly cases
As a first verification exercise, the different fuel assembly types (Figure 2A) were analyzed, consisting of 6 UOX and 3 MOX assemblies, with variations in the number of burnable absorbers and control rods. The results obtained for all the different fuel types are summarized in Table 1. First, it could be observed that KANECS demonstrated excellent agreement for assemblies without control rods or burnable absorbers, with RMS errors of less than 0.79% and
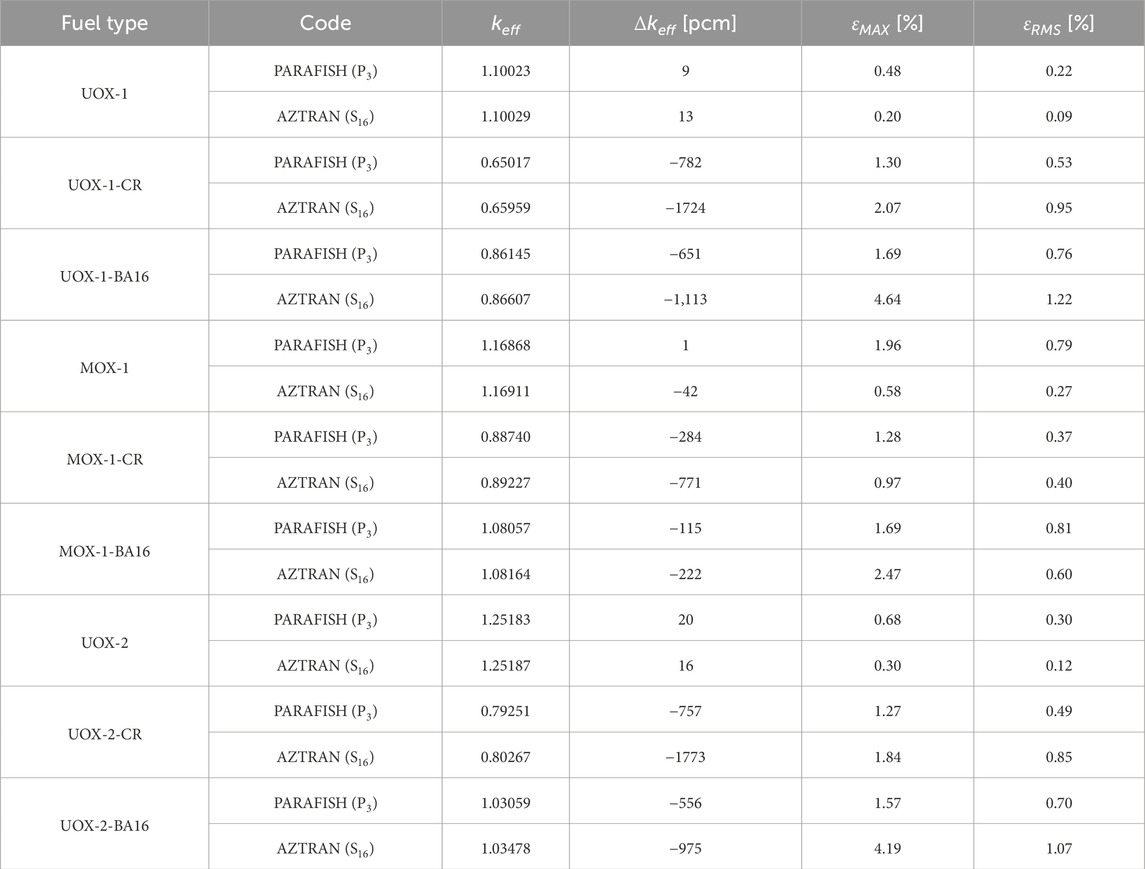
Table 1. Deviation results of KANECS SP3 from reference codes (single-assembly KAIST).
4.1.2 KAIST 3A checkerboard cases
For the next verification, four different (UOX/MOX) checkerboard arrangements were investigated to provide a more realistic assessment. As shown in Figure 2B, the configurations have different amounts of absorbers, making them more challenging since the spectrum interface among the fuel assemblies is very strong. The checkerboard calculation results are shown in Table 2. As foreseen, the most significant discrepancies from the references occur in the poisoned cases, with RMS error differences up to 1.15% (PARAFISH) and 2.30% (AZTRAN), respectively. In addition, the highest
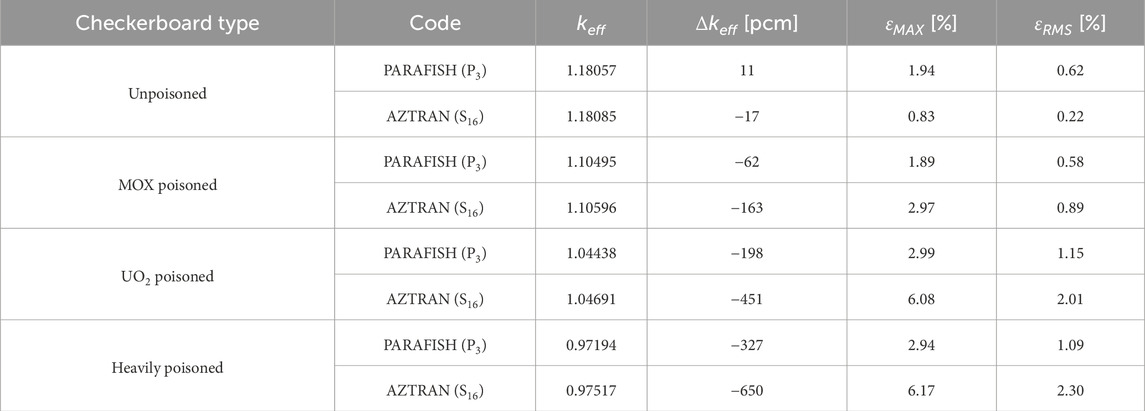
Table 2. Deviation results of KANECS SP3 from reference codes (checkerboard KAIST).
4.1.3 2D/3D KAIST 3A ARO case
Finally, the 2D/3D KAIST 3A benchmark problems under the ARO (all control rods out) condition have been simulated. The 2D case is illustrated in the core layout depicted in Figure 2C, while the 3D case extends the same 2D radial configuration by 365.76 cm and includes axial reflectors at the top and bottom of the core, each with a width of 21.42 cm. The results of the calculation are outlined in Table 3, and the detailed pin power distribution from the KAIST 3A is illustrated in Figure 3. The results show that the
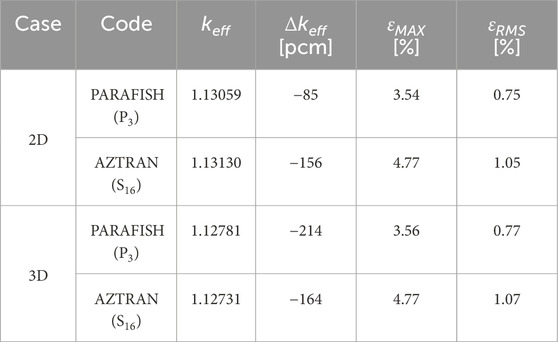
Table 3. Deviation results of KANECS SP3 from reference codes (KAIST 3A ARO).
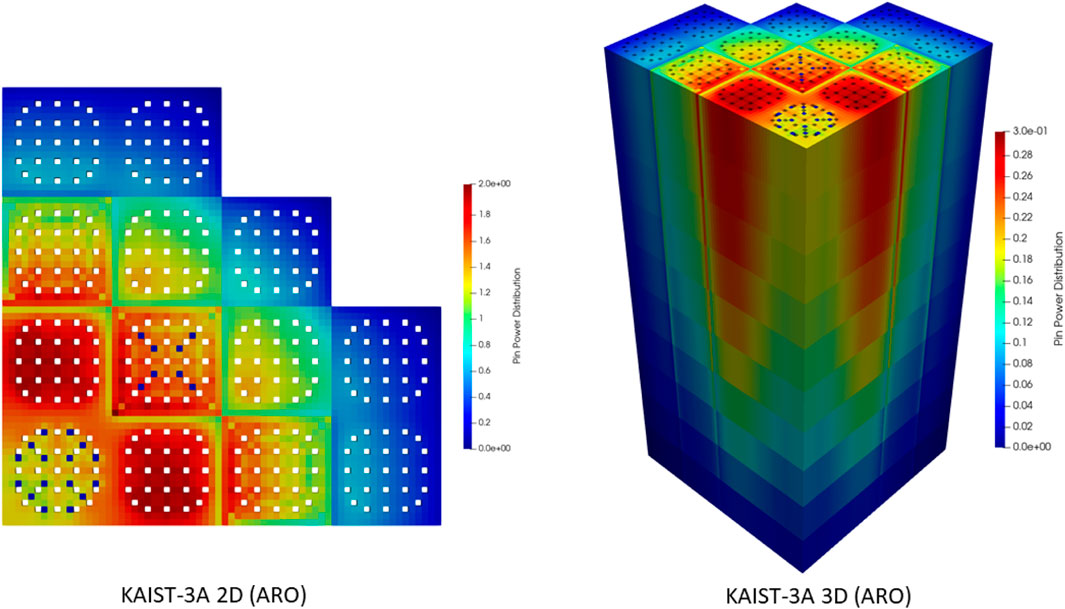
Figure 3. KAIST-3A Benchmark pin power distribution.
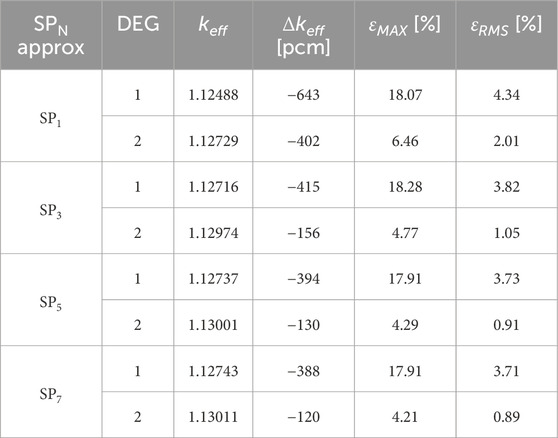
Table 4. 2D-KAIST ARO accuracy results for SPN approximations, comparing against AZTRAN (S16).
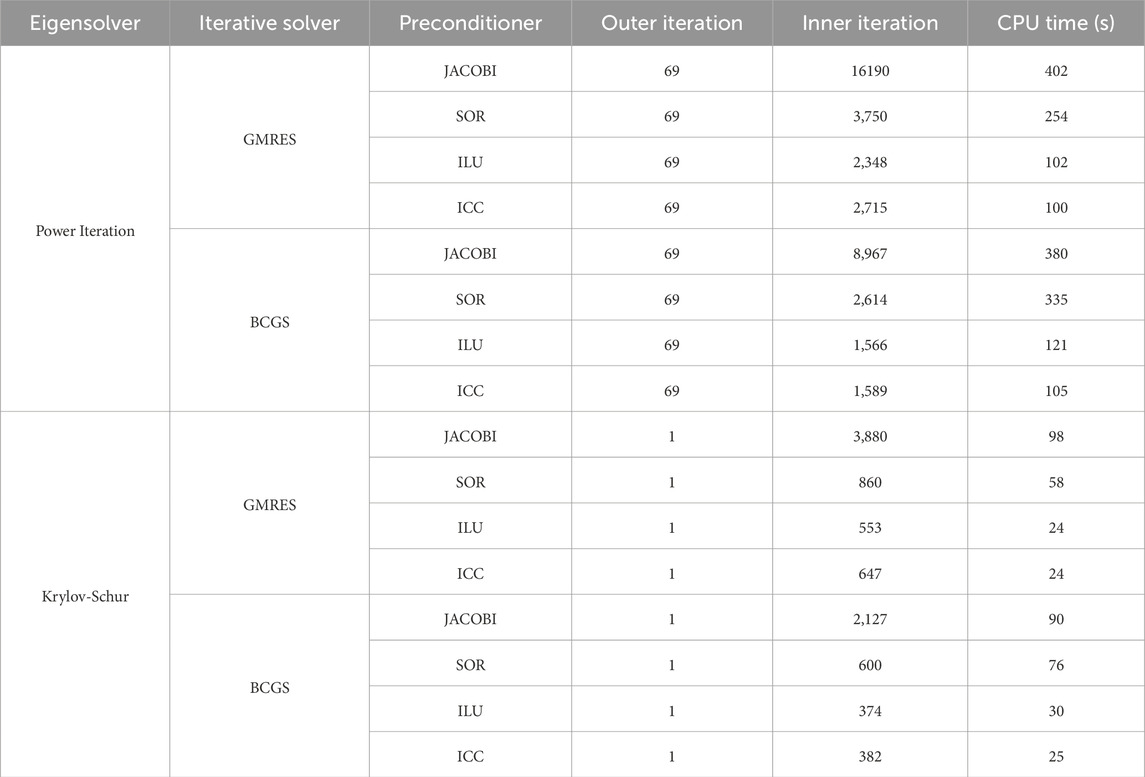
Table 5. Convergence behavior for the 2D-KAIST ARO Benchmark.
4.2 C5G7 benchmark
The C5G7 benchmark (Lewis et al., 2003), proposed by the OECD/NEA, is designed to assess the capability of modern deterministic neutron transport codes in simulating heterogeneous reactor cores with strong transport gradients and without spatial homogenization. The C5G7 configuration, represented in Figure 4, includes two types of fuel assemblies (UO2 and MOX). Each assembly consists of a 17 × 17 pin-cell containing materials such as UO2, 4.3% MOX, 7.0% MOX, 8.7% MOX, a fission chamber, a guided tube, and a moderator. The side length of each assembly is 21.42 cm, and the pin-cell pitch is 1.26 cm. A noteworthy aspect, as the KANECS code deals with Cartesian geometry and cannot handle circular shapes, a rectangular mesh discretization displayed in Figure 4A is employed, preserving the circular area. Further details and specifications, including the geometry and the isotropic transport corrected cross sections with 7 energy groups, can be found in (Lewis et al., 2003).
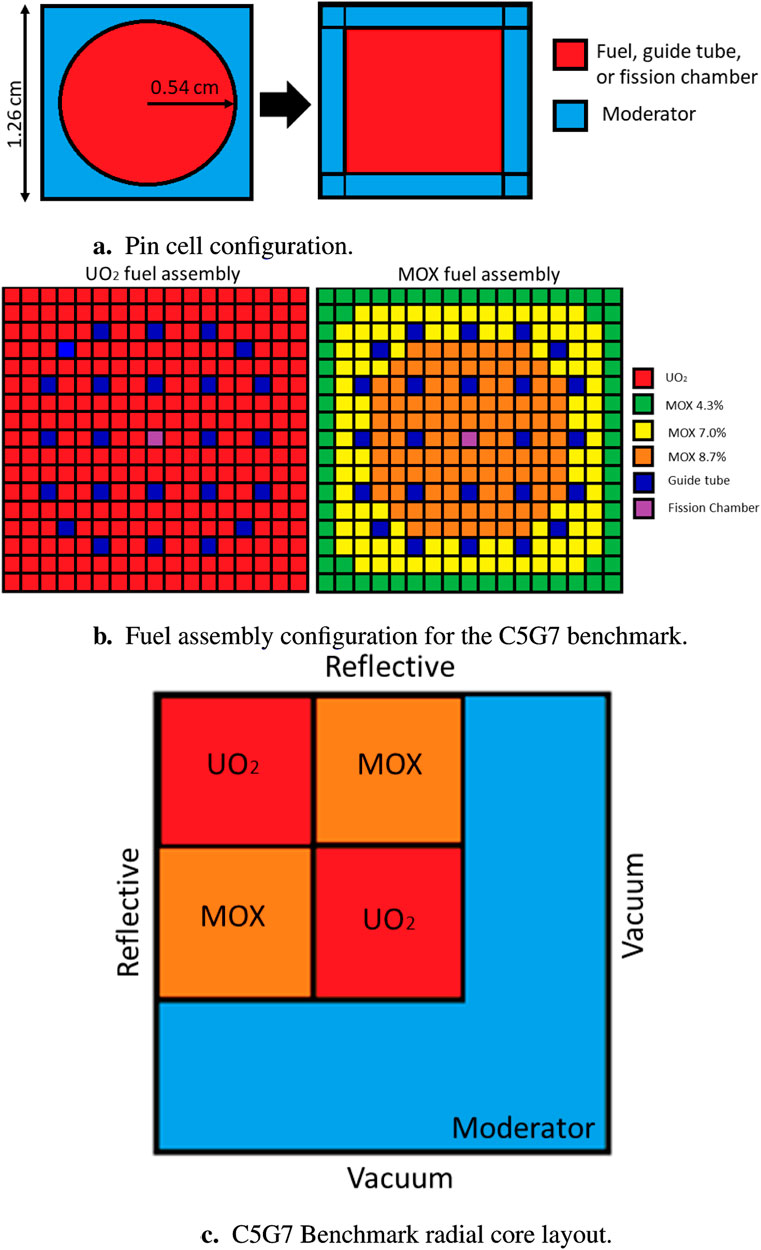
Figure 4. C5G7 benchmark geometry. (A) Pin cell configuration. (B) Fuel assembly configuration for the C5G7 benchmark. (C) C5G7 Benchmark radial core layout.
4.2.1 Assembly cases
The first exercise verification simulates the UO2 and MOX fuel assemblies illustrated in Figure 4B. Two configurations were considered: “fully reflected” (reflective boundary conditions applied to all faces) and “partially reflected” (vacuum boundary conditions on the right and bottom and reflective boundary conditions on the top and left). Table 6 provides the calculation results. As it can be observed, the fully reflected results showed excellent concordance, the highest difference was found in the MOX assembly with an RMS error difference below 0.56% and
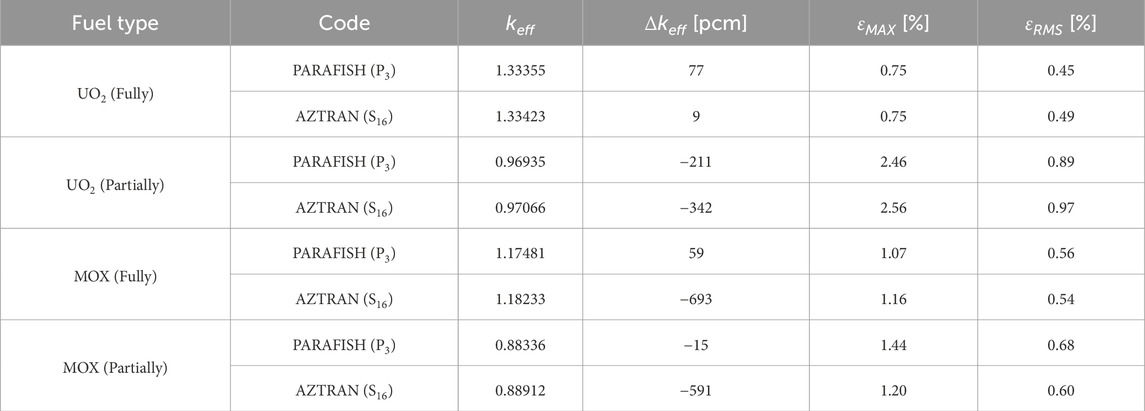
Table 6. Deviation results of KANECS SP3 from reference codes (single-assembly C5G7).
4.2.2 C3 mini-core configuration
The following exercise involves modeling the C3 benchmark, which features a 2 × 2 mini-core configuration. This model is essentially the C5G7 model shown in Figure 4C, except that the moderator does not surround it, and the reflective boundary conditions are applied to all four faces. The results, displayed in Table 7, again showcase the consistency with the previous results. The solution produced a good agreement with the references. KANECS closely aligns with PARAFISH, obtaining differences of approximately 53 pcm for the
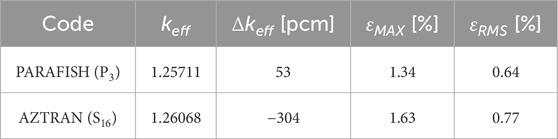
Table 7. Deviation Results of KANECS SP3 from Reference Codes (C3 minicore).
4.2.3 2D/3D C5G7 benchmark
At last, the 2D/3D C5G7 benchmarks were analyzed. The 2D configuration is shown in Figure 4C. Regarding the 3D configuration, the fuel assemblies are extended 192.78 cm in the z-direction with an additional 21.42 cm of moderator material axially added at the top and bottom. The numerical results are illustrated in Table 8, with maximum eigenvalue errors of about 261 and 275 pcm for the 2D and 3D cases, respectively. Furthermore, the maximum RMS errors are found to be less than 1.10%, indicating that the results of simulating a core without spatial homogenization agree with the transport references. Lastly, Figure 5 illustrates the corresponding pin power distribution for each configuration. Concerning the sensitivity analysis of the 2D-C5G7 Benchmark’s accuracy, Table 9 displays the results obtained by varying the angular approximation and the polynomial degree compared to AZTRAN (S16). As expected, the accuracy increases as the parameters grow, moving from the lowest approximation, SP1 with DEG 1 (
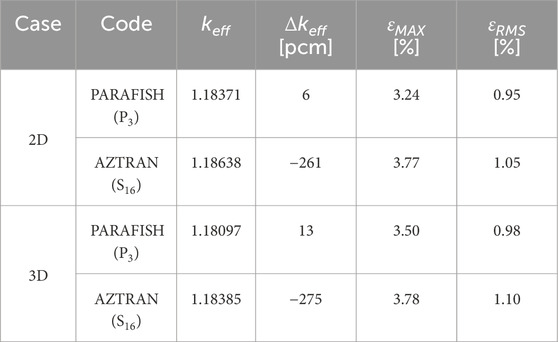
Table 8. Deviation results of KANECS SP3 from reference codes (C5G7 benchmark).
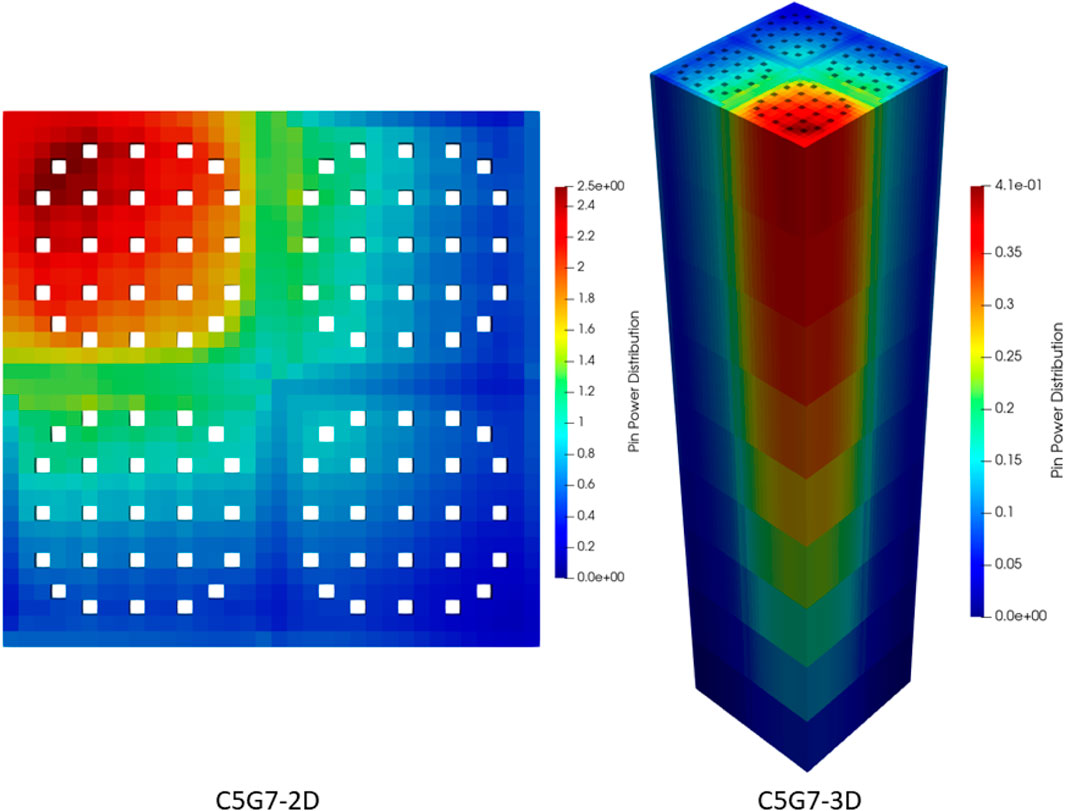
Figure 5. C5G7 Benchmark pin power distribution.
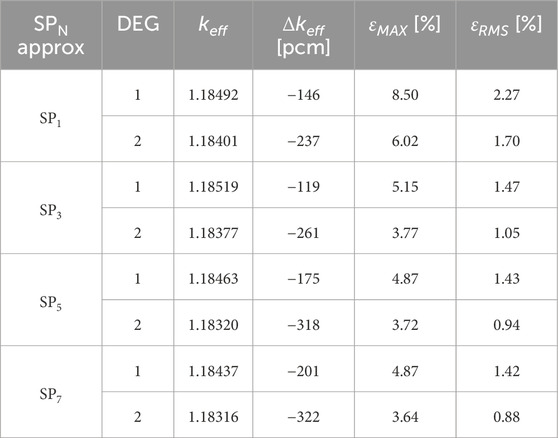
Table 9. 2D-C5G7 accuracy results for SPN approximations, comparing against AZTRAN (S16).

Table 10. Convergence behavior for the 2D-C5G7 Benchmark.
5 Conclusion and outlook
The Karlsruhe Neutronics Core Simulator (KANECS) was recently developed and verified using the well-known benchmark problems KAIST 3A and C5G7. KANECS is based on the SPN approximation and continuous Galerkin finite-element method (CGFEM). Furthermore, it was founded on three powerful libraries deal. ii, PETSc, and SLEPc, which together offer advanced simulation software for solving large-scale problems like the neutronic pin-by-pin analysis. The results of the KAIST-3A problems usually exhibited good concordance with respect to the transport references. However, when analyzing the checkerboard arrangements, which are very heterogeneous configurations, significant differences were found since the SPN approximation might struggle in regions with strong flux gradients (like fuel pins adjacent to control rods or gadolinium rods). Consequently, super homogenization or discontinuity factors approaches need to be implemented as in other similar tools to enhance the results. Regarding the C5G7 benchmarks, the results show good agreement with the references despite being a more challenging problem without spatial homogenization. To summarize, KANECS was shown to provide good overall accuracy in predicting the
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
JD-G: Conceptualization, Formal Analysis, Methodology, Software, Validation, Writing–original draft, Writing–review and editing. AC-M: Conceptualization, Methodology, Software, Writing–original draft, Writing–review and editing. V-HS-E: Conceptualization, Methodology, Supervision, Writing–original draft, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. The authors thank the HGF Program NUSAFE at KIT and the BMBF Innovation Pool SMR Initiative for the financial support. In addition, we acknowledge support by the KIT-Publication Fund of the Karlsruhe Institute of Technology.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ahrens, J., Geveci, B., and Law, C. (2005). “Paraview: an end-user tool for large-data visualization,” in Visualization Handbook (Burlington: Butterworth-Heinemann), 717–731.
Arndt, D., Bangerth, W., Bergbauer, M., Feder, M., Fehling, M., Heinz, J., et al. (2023). The deal.II library, version 9.5. J. Numer. Math. 31, 231–246. doi:10.1515/jnma-2023-0089
Babcsány, B., Pós, I., Böröczki, Z. I., and Kis, D. P. (2022). Hybrid finite-element-based numerical solution of the SP3 equations – SP3 solution of two- and three-dimensional VVER reactor problems. Ann. Nucl. Energy 173, 109117. doi:10.1016/j.anucene.2022.109117
Balay, S., Abhyankar, S., Adams, M. F., Benson, S., Brown, J., Brune, P., et al. (2024). PETSc/TAO Users Manual. Technical Report.
Beckert, C., and Grundmann, U. (2008). Development and verification of a nodal approach for solving the multigroup SP3 equations. Ann. Nucl. Energy 35, 75–86. doi:10.1016/j.anucene.2007.05.014
Brantley, P. S., and Larsen, E. W. (2000). The simplified P3 approximation. Nucl. Sci. Eng. 134, 1–21. doi:10.13182/nse134-01
Cho, N. Z. (2000). Benchmark Problem 3A: MOX Fuel-Loaded Small PWR Core (MOX Fuel with Zoning, 7 Group Homogenized Cells). Available online at: https://github.com/nzcho/Nurapt-Archives/tree/master/KAIST-Benchmark-Problems.
Duran-Gonzalez, J., del Valle-Gallegos, E., Reyes-Fuentes, M., Gomez-Torres, A., and Xolocostli-Munguia, V. (2021). Development, verification, and validation of the parallel transport code AZTRAN. Prog. Nucl. Energy 137, 103792. doi:10.1016/j.pnucene.2021.103792
Duran-Gonzalez, J., Sanchez-Espinoza, V. H., Mercatali, L., Gomez-Torres, A., and Valle-Gallegos, E. d. (2022). Verification of the parallel transport codes parafish and AZTRAN with the TAKEDA benchmarks. Energies 15, 2476. doi:10.3390/en15072476
Ferraro, D., García, M., Valtavirta, V., Imke, U., Tuominen, R., Leppänen, J., et al. (2020). Serpent/subchanflow pin-by-pin coupled transient calculations for a pwr minicore. Ann. Nucl. Energy 137, 107090. doi:10.1016/j.anucene.2019.107090
Fontenla, Y., Vidal-Ferràndiz, A., Carreño, A., Ginestar, D., and Verdú, G. (2024). FEMFFUSION and its verification using the C5G7 benchmark. Ann. Nucl. Energy 196, 110239. doi:10.1016/j.anucene.2023.110239
Gelbard, E. M. (1960). Application of the Spherical Harmonics Method to Reactor Problems. Technical Report WAPD-BT-20. Pittsburgh: Bettis Atomic Power Laboratory.
Hamilton, S. P., and Evans, T. M. (2015). Efficient solution of the simplified PN equations. J. Comput. Phys. 284, 155–170. doi:10.1016/j.jcp.2014.12.014
Hébert, A. (2010). Mixed-dual implementations of the simplified method. Ann. Nucl. Energy 37, 498–511. doi:10.1016/j.anucene.2010.01.006
Lewis, E. E., and Miller, W. F. (1993). Computational Methods of Neutron Transport. American Nuclear Society, Inc.
Lewis, E. E., Tsoulfanidis, N., and Smith, M. A. (2003). Benchmark on Deterministic Transport Calculations without Spatial Homogenization. NEA/NSC/DOC.
Lo Muzio, S., and Seubert, A. (2024). Implementation of the steady state simplified P3 (SP3) transport solver in the finite element neutronic code FENNECS, part 1: theory. Ann. Nucl. Energy 200, 110303. doi:10.1016/j.anucene.2023.110303
Muñoz-Peña, G., Galicia-Aragon, J., Lopez-Solis, R., Gomez-Torres, A., and del Valle-Gallegos, E. (2023). Verification and validation of the SPL module of the deterministic code AZNHEX through the neutronics benchmark of the CEFR start-up tests. J. Nucl. Eng. 4, 59–76. doi:10.3390/jne4010005
Roman, J. E., Campos, C., Dalcin, L., Romero, E., and Tomas, A. (2024). SLEPc Users Manual. D. Sistemes Informàtics i Computació. Tech. Rep. DSIC-II/24/02 - Revision 3.21. Universitat Politècnica de València.
Yu, L., Lu, D., and Chao, Y.-A. (2014). The calculation method for SP3 discontinuity factor and its application. Ann. Nucl. Energy 69, 14–24. doi:10.1016/j.anucene.2014.01.032
Zhang, B., Wu, H., Liand, Y., Cao, L., and Shen, W. (2017). Evaluation of pin-cell homogenization techniques for PWR pin-by-pin calculation. Nucl. Sci. Eng. 186, 134–146. doi:10.1080/00295639.2016.1273018
Keywords: neutron transport, SPN approximation, finite-element method, steady-state, pin-by-pin
Citation: Duran-Gonzalez J, Campos-Muñoz A and Sanchez-Espinoza V-H (2025) Development of the 3D SPN transport solver KANECS for nuclear reactor analysis. Front. Energy Res. 13:1498331. doi: 10.3389/fenrg.2025.1498331
Received: 18 September 2024; Accepted: 24 February 2025;
Published: 14 March 2025.
Edited by:
Turgay Korkut, Sinop University, TürkiyeReviewed by:
Dan Kotlyar, Georgia Institute of Technology, United StatesArmin Seubert, Gesellschaft für Anlagen-und Reaktorsicherheit (GRS) gGmbH, Germany
Copyright © 2025 Duran-Gonzalez, Campos-Muñoz and Sanchez-Espinoza. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Julian Duran-Gonzalez , anVsaWFuLmdvbnphbGV6QGtpdC5lZHU=