 Dexin Li
Dexin Li Haifeng Zhang
Haifeng Zhang- Electric Power Research Institute, State Grid Jilin Electric Power Co., Ltd., Changchun, China
The intermittent and fluctuating nature of active power output from wind power significantly affects the Load Frequency Control (LFC) in a power grid based on active power balance. To address this issue, this paper proposes a cloud-based intelligent PI controller designed to enhance the performance of LFC in smart grids with large-scale wind power integration. By using the error and the rate of change of error as the antecedent inputs of the cloud model-based controller and the tuning values of P and I as the consequent outputs of the cloud model, adaptive online tuning of the PI parameters is achieved. Based on the control rules of LFC in interconnected power grids and considering the uncertainty of wind power’s active power output, the membership cloud parameters are designed, which effectively solves the problems of poor parameter robustness in traditional PI control and significant human influence on membership degrees in Fuzzy PI control. A simulation model of a dual-area interconnected power grid with wind power for LFC was built using Matlab/Simulink. Two typical disturbances, namely random fluctuations in wind power and sudden increases/decreases in load, were simulated. The simulation results demonstrate that the cloud model-based intelligent PI controller designed in this paper can effectively track the frequency variations caused by random fluctuations in wind power and exhibits strong robustness.
1 Introduction
In an interconnected power grid, load frequency control is an important technical means to ensure the safe, reliable, stable, and economical operation of the system (Bevrani H, 2009). With the continuous improvement in society’s requirements for power quality, supply security, and reliability, the expansion of interconnected power grid scale, and the rapid development of new energy sources, traditional load frequency control methods face serious challenges and struggle to meet the performance requirements of LFC (Liang Y et al., 2024). Among these challenges, large-scale wind power, as the fastest-growing renewable energy source, has already demonstrated significant social and environmental benefits (Ratnam K et al., 2020). However, unlike conventional forms of power generation, the primary energy source for wind power (i.e., wind energy) is difficult to predict and control accurately. Therefore, integrating large-scale wind power into the grid imposes higher demands on load frequency control in interconnected power grids (Liu et al., 2017; Liu et al., 2024).
Traditional LFC employs classical PI/PID control (Tan, 2010). However, with the integration of high-penetration renewable energy sources, the system’s uncertainties are further increased. The PI/PID controllers based on linear control theory struggle to meet the control requirements of the new type of interconnected power system that exhibits strong nonlinear characteristics. Novel LFC control strategies have been continuously proposed, such as robust control methods based on linear matrix inequality design (Rerkpreedapong et al., 2003; Ojaghi and Rahmani, 2017), disturbance-insensitive sliding mode control methods (Wei M et al., 2021; Huynh et al., 2024; Tummala et al., 2018)), model predictive control methods with rolling optimization strategies (Qi X et al., 2022; Jia Y et al., 2019; Jun Zhou et al., 2024; Liu et al., 2016), and AI-based control methods (Zhang Y et al., 2022; Cam and Kocaarslan, 2005; Yan and Xu, 2020; Wadi et al., 2024). These control methods partially compensate for the shortcomings of traditional FLC, but they rely on precise mathematical models, have high control costs, and pose difficulties in design and implementation.
The cloud model, based on statistical and fuzzy mathematics, provides a unified representation of the fuzziness and randomness between linguistic values of uncertainty and precise numerical values. It achieves a natural transformation of uncertainty between qualitative concepts and their quantitative counterparts (Li D et al., 2009; Wang G et al., 2014). Currently, cloud model theory has been successfully applied in intelligent control and performance evaluation of large-scale systems. Based on a thorough analysis of LFC control characteristics in an interconnected power grid with high penetration wind power, this study proposes an intelligent PI control strategy using cloud model. The main contributions of this paper are as follows:
1) The antecedent membership cloud functions were separately constructed for Area Control Error (ACE) and its rate of change, as well as the consequent membership cloud functions for the proportional parameter P and integral parameter I of the PI controller. Based on this, a cloud-based intelligent controller for LFC was designed. Compared to traditional fuzzy control, the proposed cloud-based LFC intelligent controller in this paper achieves faster frequency control speed and higher efficiency.
2) A simulation model for LFC in a two-area interconnected power grid with high penetration wind power was built in the Matlab/Simulink environment. Two typical power disturbance events, namely random wind power fluctuation and sudden load change, were simulated. The simulation results were compared and analyzed against the LFC control effect based on Fuzzy PI control. This validation confirms the effectiveness and robustness of the intelligent PI controller based on the cloud model.
The remainder of this paper is organized as follows: Section 2 establishes the LFC model for interconnected power grid with wind power. Then, the cloud model-based intelligent PI controller for LFC is developed in Section 3. Section 4 tests the effectiveness of the proposed intelligent PI controller. The conclusions are given in Section 5.
2 Load frequency control model for interconnected power grid with wind power
The power system achieves tracking of generation power to load power by sensing frequency variations, thereby maintaining power balance and frequency stability in the grid. After the large-scale integration of wind power, the fluctuation in its active power output has, to some extent, affected the power balance state of the grid and increased the difficulty of active-power frequency control in the system.
Although multi-area power systems are strongly coupled and time-varying, LFC was designed for small fluctuations and perturbations. At this point, the system operates near a stable point, allowing for the establishment of its model using low-order linear transfer functions (Bevrani H, 2009).
In this study, the LFC model of a power system incorporating wind power is established based on conventional thermal power units, as shown in Figure 1. Before conducting a detailed derivation, the following explanations are provided for this model.
1) The objective of LFC (Load Frequency Control) in interconnected power systems is to maintain the system frequency and the power exchange between regions within a normal range. Based on this objective, the frequency deviation Δf(t) and the power deviation on the tie line ΔPtie,i(t) are usually linearly combined to form a variable called Area Control Error ACE(t), which serves as the control signal in the LFC problem. The ACE(t) being zero is considered a criterion for measuring the stability achieved in the control area. Therefore, the ACE for the ith area, ACEi(t), can be defined as Equation 1:
where, βi is the frequency deviation coefficient. Δfi(t) and ΔPtie,i(t) represent the frequency deviation and tie line power deviation for the ith area, respectively.
2) The LFC system of conventional thermal power units consists of components such as a governor, non-reheat steam turbine, generator, load, tie line, and controller. Each component in the different areas is represented by an equivalent multi-machine dynamic response using a single-machine model. When there is a change in the load or an external disturbance in a specific area, the controller receives control input signals and issues control commands to adjust the position of the governor valve. This regulates the steam flow into the turbine, thereby changing the turbine’s output power, affecting the generator’s input power, and adjusting the active power output of the generator to achieve the control objective.
3) After meeting the set load demand in each area, the excess electricity generated by the wind power units connected to each area is considered an energy-bounded external disturbance signal. In order to suppress the randomness of this disturbance, a distributed structure is formed by sharing and coordinating control information among partially interconnected controllers based on sparse optimization results. The system suppresses load variations and random disturbances by actively adjusting the control loop of the thermal power units.
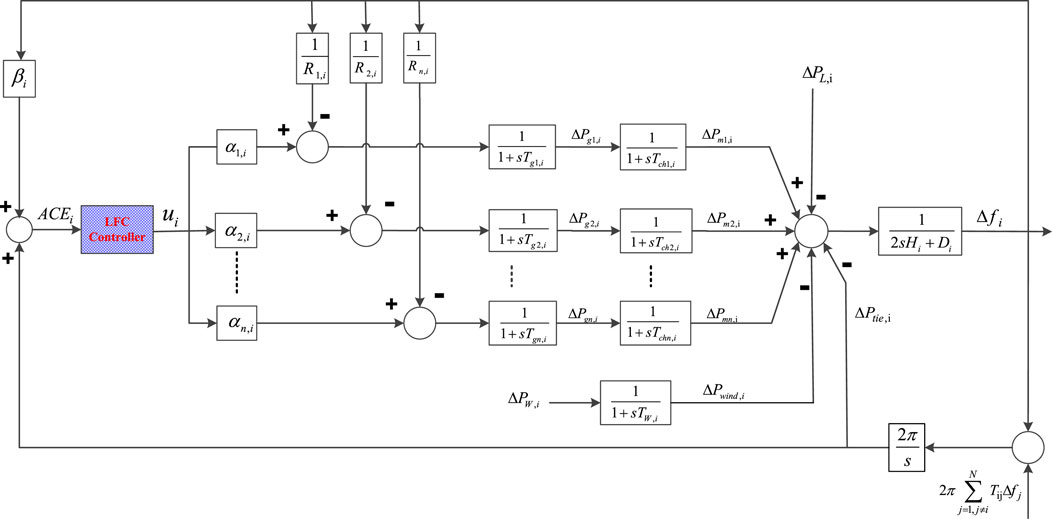
Figure 1. LFC model for the ith area in multi-area power grid with wind power.
The model described in Figure 1 can be represented by a set of differential equation, as shown in Equation 2.
where, His represents equivalent inertia of area i; Tchk,i represents turbine time constant; Tgk,i represents governor time constant; TW,i represents wind generator time constant; αk,i represents generator ramp rate factor; ΔPmk,i represents the change in mechanical power of the kth generators in the ith area; ΔPL,i represents the fluctuation in active load power; ΔPwind,i represents wind power deviation in the ith area; ΔPW,i represents the fluctuation of wind power; ΔPgk,i represents regulating valve position deviation; ui represents the control variable, which refers to the output of the LFC controller. As shown in Equation 3, the output of the LFC controller can be represented as a function of ACE (Wood AJ et al., 1996):
3 Cloud model-based intelligent PI controller for LFC
3.1 Cloud model theory
Cloud model, based on probability theory and fuzzy mathematics, uses natural language to describe the bidirectional conversion of quantitative and qualitative information, reflecting the correlation between randomness and fuzziness (Kavousi-Fard A et al., 2016; K. Zhou et al., 2024).
Definition:. Let E be a quantitative domain on precise numerical values, and F be a qualitative concept on the quantitative domain E. If a quantitative value x is a random realization of the qualitative concept F, and x has a stable tendency with a certainty degree μ(x)∈ [0, 1], where μ: E → [0, 1], ∀x∈E, x→μ(x), the distribution of x on the domain E is called a cloud, and each x is considered a cloud droplet.
The cloud model uses three numerical characteristics to reflect the overall properties of a concept. These three numerical characteristics (Li D et al., 2009) are the Expected Value (Ex), Entropy (En), and Hyper Entropy (He).
The solution of the three numerical variables, i.e., the formation of the cloud model, requires the collection of a certain number of cloud droplet samples. By collecting multiple samples, the more samples collected, the more accurate the obtained cloud model will be, and quantitative input preprocessing should be performed. Ex, En, and He can be obtained through statistical analysis of the research object’s sample data using Equation 4.
This process of obtaining a cloud model composed of three numerical variables essentially refers to the statistical analysis of the sample data.
The cloud model has similarities with fuzzy mathematics, but it also has its unique aspects, particularly in how it handles uncertainty. The cloud model was proposed based on probability theory and fuzzy mathematics, aiming to address the uncertain transition between qualitative concepts and quantitative descriptions. Compared to fuzzy mathematics, the cloud model not only considers fuzziness but also incorporates randomness, providing a more comprehensive approach to uncertainty. The cloud model describes the quantitative representation of qualitative concepts through the numerical characteristics of clouds, while fuzzy mathematics primarily deals with fuzziness, which pertains to intermediate transitions between categories of things. The successful application of the cloud model demonstrates its unique advantages in decision analysis, intelligent control, and other areas of complex systems, as it better simulates the uncertainty and fuzziness inherent in human thinking.
3.2 Rule inference of cloud model
The key to cloud model application lies in the generation of cloud droplets, and the algorithm for generating cloud droplets is called a cloud generator (CG). The cloud generator includes a forward cloud generator and a backward cloud generator (Wang G et al., 2014).
The forward cloud generator is responsible for generating cloud droplets (drop (x, μ)) based on the numerical characteristics of the cloud (Ex, En, He), which represents a mapping from qualitative to quantitative. On the other hand, the backward cloud generator is a conversion model that transforms quantitative values into qualitative concepts. The specific algorithm of the cloud generator can be found in the reference (Wang G. et al., 2014).
In control engineering, rules like “perception-action” represent logical causal relationships between concepts. Cloud models can be used to construct qualitative rule generators for control logic. Perception serves as the antecedent of control rules and can have one or more conditions. Action, on the other hand, represents detailed control actions and serves as the consequence of control rules. Both perception and action have a certain degree of uncertainty in practical engineering.
In the domain E1, for a specific point y, the cloud generator can generate a certainty distribution drop (y, μ), indicating the degree of certainty that point a belongs to the qualitative concept F1. In this case, the cloud generator is referred to as the antecedent cloud generator CGA.
If a certainty value μ is given, where μ∈ [0, 1], the cloud generator can be used to generate a cloud droplet distribution on the concept F2 in the domain E2 that satisfies the specified certainty. In this case, the cloud generator is referred to as the consequent cloud generator CGB.
It is possible for a two-dimensional spatial domain to construct both a two-dimensional antecedent cloud generator and a consequent cloud generator, as shown in Figure 2.
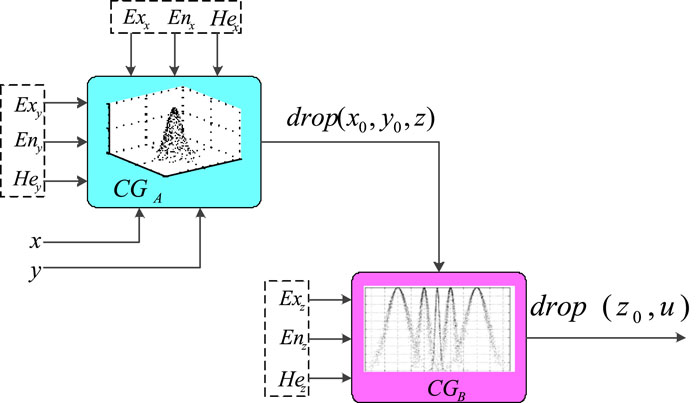
Figure 2. Double condition cloud generator.
3.3 Design of parameter self-tuning intelligent PI controller based on cloud model
The central idea of LFC is to ensure the stable operation of system frequency and the exchange of power between areas according to planned values. However, in practical applications, due to the uncertainty of system operation, the randomness of disturbance variations, and the uncertainty in the mapping relationship between input deviations and controller outputs, LFC faces severe challenges. Cloud models can effectively address the uncertainty relationship between determinism and quantification. Therefore, by combining the cloud model with conventional PI controllers, the cloud-based PI controller can provide new opportunities for the LFC.
By using ACE (Area Control Error) and its rate of change as inputs to the antecedents of the cloud model rules and using the tuning values of P (Proportional) and I (Integral) as outputs of the entire system, a cloud model system with dual inputs and single output applicable for LFC is constructed, as shown in Figure 3. By sampling ACE, both ACE and its rate of change are input into the controller. Under the assumption that the three numerical characteristics of the cloud model are known when the antecedent of a rule is triggered by a certain input, it will randomly generate a certainty level μ. This certainty level then stimulates the consequent generators CGP and CGI, resulting in two sets of cloud droplets, drop (P, μ) and drop (I, μ), which represent the tuning values of P and I, respectively.

Figure 3. The structure of cloud PI controller for LFC.
In traditional methods, the tuning of parameters P and I is mainly based on accumulated operational experience in industrial production. When selecting linguistic variable values, we need to consider both the flexibility and specificity of control rules, as well as the simplicity and feasibility of control. Therefore, based on the reference of operational experience, we will use five linguistic variable values, namely “Positive Big (PB), Positive Small (PS), Zero (ZE), Negative Small (NS), and Negative Big (NB)”. The maximum membership degree for each linguistic value is “1”. The range of variations for ACE and its rate of change together form a two-dimensional domain, which is then combined with the range of variations for △P and △I to create two independent biconditional cloud rule inference generators. These generators are used to dynamically tune the parameters P and I in real-time during the control process.
The cloud model inference rules applied to load frequency control are shown in Table 1.
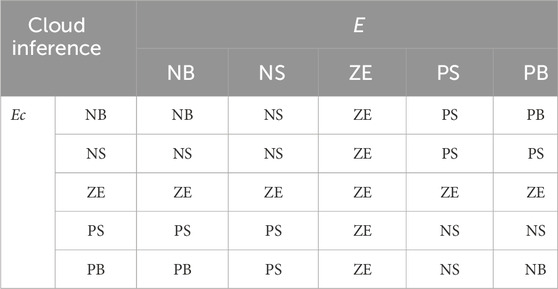
Table 1. Cloud model inference rules table.
Based on operational experience, the control rules for self-tuning the PI controller using cloud model parameters can be expressed in linguistic terms.
Region 1: ACE (Area Control Error) E = NB (Negative Big) indicates that the actual value deviates significantly from the set value, indicating a large error. Since the rate of change of ACE EC = PB (Positive Big) indicates a rapidly increasing trend in the positive direction. Therefore, no adjustment is made to the output at this time, and the output value U = ZE (Zero), which corresponds to the last row of the first column in the cloud control Table 1.
Region 2: The E = NS (Negative Small) indicates that the actual value deviates slightly from the set value. In this case, if EC = ZE (Zero), which means the rate of change of the error has no changing trend, the output value is required to decrease accordingly. The output value U = NS (Negative Small). This corresponds to the second column in the third row of cloud control Table 1.
Region 3: E = PS (Positive Small) indicates that the actual value is slightly lower than the set value. In this case, if EC = NB (Negative Big), the speed error will be changed from PS to NS. Consequently, the output U = NS (Negative Small) accordingly.
After formulating cloud inference rules, the cloud intelligent controller for LFC can be designed using a cloud generator. It mainly consists of four parts: input fuzzification, cloud inference rules, cloud inference, and output defuzzification, as shown in Figure 3.
In addition to inputting cloud inference rules in advance, the cloud intelligent controller requires the definition of the input and output variable domains. Three numerical variables (Ex, En, and He) can be obtained by using statistical tools based on the prior data accumulated from the input and output variables during the operation or simulation process of the controlled object.
4 Simulation and analysis
4.1 Simulation model and parameters
To validate the effectiveness of the cloud model-based intelligent PI controller proposed in this paper for LFC, a simulation model for load frequency control with wind power generation was built in the Matlab/Simulink based on a two-area LFC control model.
The cloud intelligent controller utilized in the simulation process of this paper adopts the cloud inference rules shown in Table 1. Combining multiple simulation processes under different control performances, based on the changes in the values corresponding to ACE and the P and I parameters, the fuzzy membership parameters corresponding to the input and output variables of the controller were obtained for five qualitative concepts (Jalali N et al., 2020). The numerical variables (Ex, En, and He) are shown in Table 2, and the corresponding membership cloud diagrams are shown in Figure 4.

Figure 4. The Membership cloud diagram.

Table 2. Membership of the cloud characteristic parameters.
4.2 Performance analysis under load step disturbance
In order to validate the control performance of the proposed cloud-based controller under significant load impacts, load step disturbances of 0.04 p.u. and 0.05 p.u. were respectively set in Area 1 and Area two at 10s and 50s, as shown in Figure 5. Both conventional PI control and Fuzzy PI control which was designed based on reference (Cam and Kocaarslan, 2005), were simultaneously employed. The time-domain responses of frequency deviation, ACE (Area Control Error), and interval transmission power deviation are shown in (Figures 6A–C), respectively.
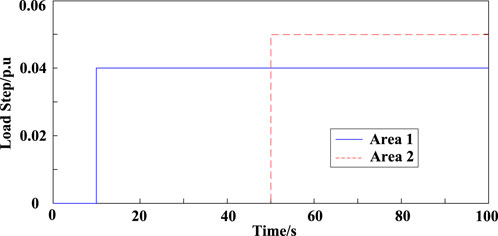
Figure 5. Load disturbance in Area 1 and Area 2.
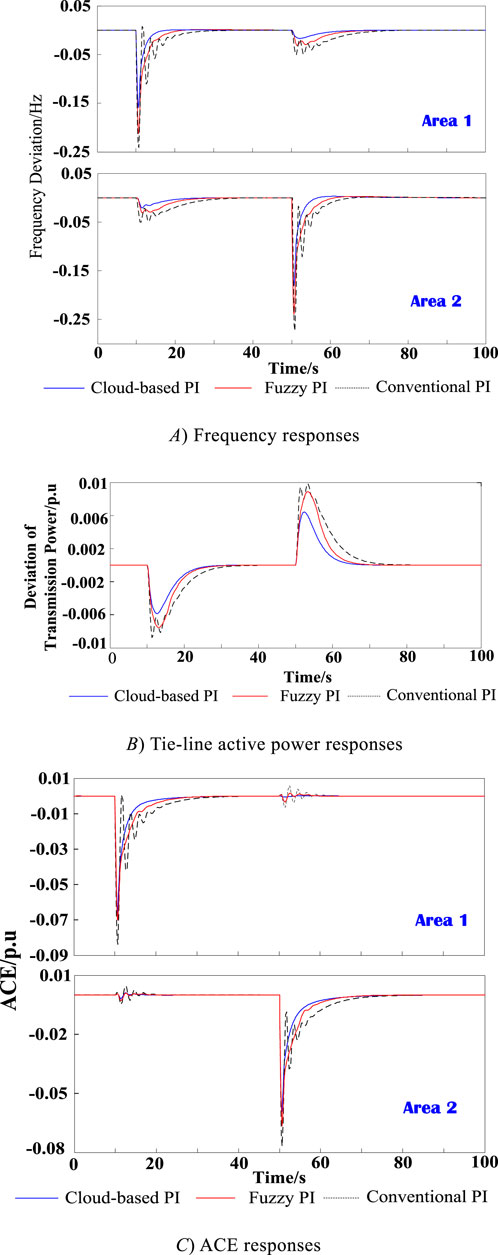
Figure 6. Control performance under load disturbance. (A) Frequency responses. (B) Tie-line active power responses. (C) ACE responses.
From Figure 6, it is evident that the proposed cloud-based intelligent PI controller and Fuzzy PI controller exhibit significantly better control performance than the traditional PI control. Notably, no oscillations were observed during the frequency recovery process, which can be attributed to the adaptive adjustment of the P and I parameters of the cloud intelligent PI controller and Fuzzy PI controller. Furthermore, compared to the Fuzzy PI control, the proposed cloud-intelligent PI controller exhibits significant advantages in terms of the speed of frequency and ACE recovery.
4.3 Performance analysis under wind power fluctuations
In order to further validate the adaptability of the proposed cloud-based intelligent PI control in frequency control of power systems with wind generation, wind power generation was introduced in Area 1 and Area 2. Based on considering the aggregation effect of wind farms, a wind power sequence was generated. The deviation between the actual wind power and the predicted value is shown in Figure 7. Using the LFC model established in this study, simulations were conducted on the dynamic frequency response of a two-area system under the stochastic wind power fluctuations shown in Figure 8A). The time-domain responses of the transmission power deviation are shown in Figure 8B).
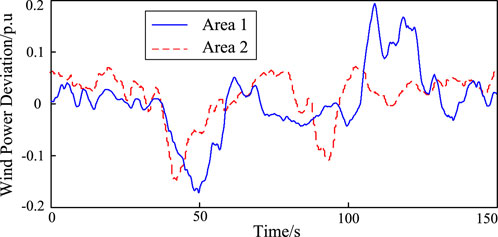
Figure 7. Wind power fluctuations in Area 1 and Area 2.
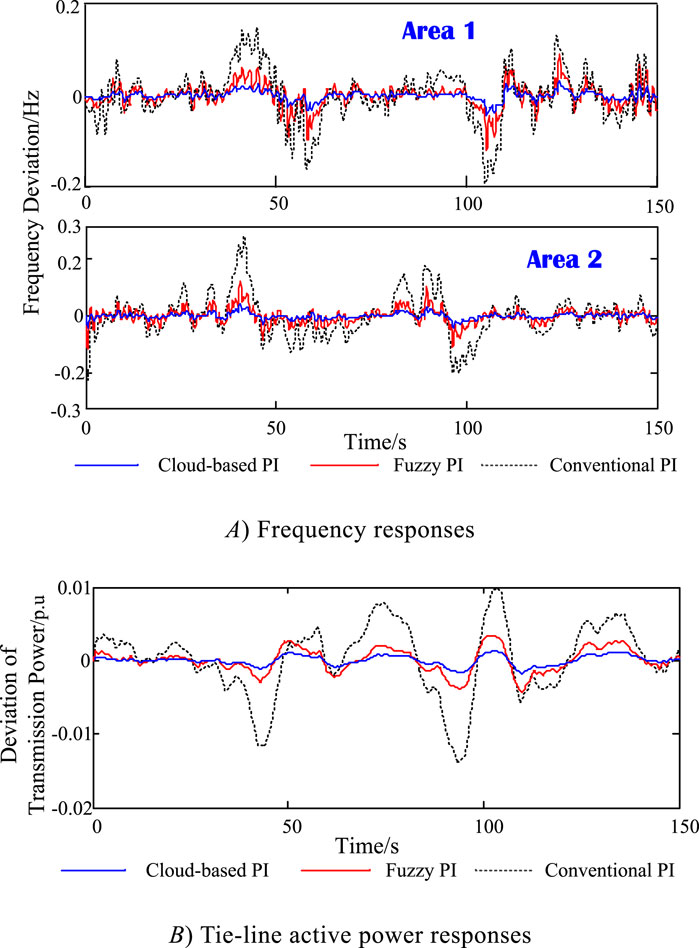
Figure 8. Control performance under wind power fluctuations. (A) Frequency responses. (B) Tie-line active power responses.
By observing the dynamic frequency response curves of the simulated results and the wind power fluctuation characteristics shown in Figure 7, it can be observed that the LFC model established in this study effectively reflects the impact of stochastic fluctuations in active power output from large-scale wind farms on the dynamic response of the LFC.
As seen from Figures 8A, B), when there are stochastic fluctuations in the active power output of wind farms, the proposed cloud-based intelligent PI control in this study can effectively track the wind power fluctuations and provide optimal control signals for the AGC units in the region to adapt to the stochastic fluctuations in wind power, which, in turn, ensures that the system frequency and ACE fluctuate within a smaller range. On the other hand, both the Fuzzy PI and conventional PI control strategies lag behind the cloud PI control in terms of frequency recovery speed and fluctuation range, and they are unable to track the stochastic variations in wind power effectively.
In conclusion, the proposed cloud-based intelligent PI controller in this study is effective in handling uncertain wind power integration and exhibits better control performance than the Fuzzy PI control strategy. The cloud-based intelligent PI control proposed in this study is not only effective in handling typical load disturbances but also capable of tracking the stochastic fluctuations in wind power. This further validates the adaptability and robustness of the proposed cloud based intelligent PI control for LFC.
5 Conclusion
This paper designs a cloud-based intelligent PI controller based on the cloud model theory, combined with the LFC characteristics of interconnected power grids. It achieves load frequency control in interconnected power grids with high wind power penetration. The designed cloud-based intelligent controller does not rely on the mathematical model of the control system. It can be designed and implemented based on the characteristics of the controlled system and prior experience. The design process is intuitive and straightforward, without the need for tedious formula derivation. The cloud-based intelligent controller exhibits strong robustness against the uncertainty of wind power and outperforms traditional fuzzy controllers in terms of tracking time, frequency fluctuation suppression, and interval control deviation.
The three numerical characteristics, namely expectation, entropy, and hyper-entropy, directly affect the control effectiveness of the cloud-based intelligent controller. Further research is still needed to optimize these characteristic parameters based on the characteristics of the controlled system.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
DL: Data curation, Funding acquisition, Methodology, Writing–review and editing. XL: Conceptualization, Funding acquisition, Methodology, Supervision, Writing–review and editing. HZ: Methodology, Writing–original draft, Writing–review and editing. XM: Data curation, Investigation, Resources, Software, Writing–original draft. ZX: Data curation, Software, Writing–original draft. CC: Data curation, Formal Analysis, Software, Visualization, Writing–review and editing. TL: Data curation, Investigation, Methodology, Software, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This publication is supported in part by grant 20230303004SF from the Jilin Province’s Major Scientific and Technological Project for the High-Quality Development of “Land-based Three Gorges of Wind and Solar Energy”.
Conflict of interest
Authors DL, XL, HZ, XM, ZX, CC, and TL were employed by State Grid Jilin Electric Power Co., Ltd.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Cam, E., and Kocaarslan, I. (2005). Load frequency control in two area power systems using fuzzy logic controller. Energ Convers. Manage 46, 233–243. doi:10.1016/j.enconman.2004.02.022
Huynh, V. V., Tran, P. T., Dong, C. S. T., Hoang, B. D., and Kaynak, O. (2024). Sliding surface design for sliding mode load frequency control of multiarea multisource power system. IEEE T Ind. Inf. 20, 7797–7809. doi:10.1109/TII.2024.3359445
Jalali, N., Razmi, H., and Doagou-Mojarrad, H. (2020). Optimized fuzzy self-tuning PID controller design based on Tribe-DE optimization algorithm and rule weight adjustment method for load frequency control of interconnected multi-area power systems. Appl. Soft Comput. 93 (1), 106424. doi:10.1016/j.asoc.2020.106424
Jia, Y., Dong, Z. Y., Sun, C., and Meng, K. (2019). Cooperation-based distributed economic MPC for economic load dispatch and load frequency control of interconnected power systems. Syst. IEEE T Power Syst. 34 (99), 3964–3966. doi:10.1109/TPWRS.2019.2917632
Jun Zhou Jia, Y., and Yong, P. (2024). Robust deep Koopman model predictive load frequency control of interconnected power systems. Electr. Pow. Syst. Res. 226, 109948. doi:10.1016/j.epsr.2023.109948
Kavousi-Fard, A., Niknam, T., and Fotuhi-Firuzabad, M. (2016). A novel stochastic framework based on cloud theory and -modified bat algorithm to solve the distribution feeder reconfiguration. IEEE T Smart Grid 7 (2), 1–750. doi:10.1109/TSG.2015.2434844
Li, D., Liu, C., and Gan, W. (2009). A new cognitive model: cloud model. Int. J. Intell. Syst. 24 (3), 357–375. doi:10.1002/int.20340
Liang, Y., Jiaming, Q., and Xinxin, L. (2024). Load frequency control of new energy power system based on adaptive global sliding mode control. Front. Energy Res. 12, 1383511. doi:10.3389/fenrg.2024.1383511
Liu, X., Wang, C., Kong, X., Zhang, Y., Wang, W., and Lee, K. Y. (2024). Tube-based distributed MPC for load frequency control of power system with high wind power penetration. IEEE T Power Syst. 39 (2), 3118–3129. doi:10.1109/TPWRS.2023.3277997
Liu, X., Zhang, Yi, and Lee, K. Y. (2016). Robust distributed MPC for load frequency control of uncertain power systems. Control Eng. Pract. 56, 136–147. doi:10.1016/j.conengprac.2016.08.007
Liu, X., Zhang, Y., and Lee, K. Y. (2017). Coordinated distributed MPC for load frequency control of power system with wind farms. IEEE T Ind. Electron 64 (6), 5140–5150. doi:10.1109/TIE.2016.2642882
Ojaghi, P., and Rahmani, M. (2017). LMI-based robust predictive load frequency control for power systems with communication delays. IEEE T Power Syst. 32 (5), 4091–4100. doi:10.1109/TPWRS.2017.2654453
Qi, X., Zheng, J., and Mei, F. (2022). Model predictive control–based load-frequency regulation of grid-forming inverter–based power systems. Front. Energy Res. 10, 932788. doi:10.3389/fenrg.2022.932788
Ratnam, K., Palanisamy, K., and Yang, G. (2020). Future low-inertia power systems: requirements, issues, and solutions - a review. Renew. Sust. Enst. Energ Rev. 2020 (C), 109773. doi:10.1016/j.rser.2020.109773
Rerkpreedapong, D., Hasanovic, A., and Feliachi, A. (2003). Robust load frequency control using genetic algorithms and linear matrix inequalities. IEEE T Power Syst. 18 (2), 855–861. doi:10.1109/TPWRS.2003.811005
Tan, W. (2010). Unified tuning of PID load frequency controller for power systems via IMC. IEEE T Power Syst. 25 (1), 341–350. doi:10.1109/TPWRS.2009.2036463
Tummala, A. S. L. V., Inapakurthi, R., and Ramanarao, P. V. (2018). Observer based sliding mode frequency control for multi-machine power systems with high renewable energy. J. Mod. Power Syst. Cle 6 (3), 473–481. doi:10.1007/s40565-017-0363-3
Wadi, M., Shobole, A., Elmasry, W., and Kucuk, I. (2024). Load frequency control in smart grids: a review of recent developments. Renew. Sust. Enst. Energ Rev. 189, 114013. doi:10.1016/j.rser.2023.114013
Wang, G., Xu, C., and Li, D. (2014). Generic normal cloud model. Inf. Sci. 280, 1–15. doi:10.1016/j.ins.2014.04.051
Wei, M., Lin, S., Zhao, Y., Wang, H., and Liu, Q. (2021). An adaptive sliding mode control based on disturbance observer for LFC. Front. Energy Res. 9, 733910. doi:10.3389/fenrg.2021.733910
Wood, A. J., and Bruce, F.Wollenberg (1996). Power generation, operation and control. USA: John Wily and Sons, Inc.
Yan, Z., and Xu, Y. (2020). A multi-agent deep reinforcement learning method for cooperative load frequency control of a multi-area power system. IEEE T Power Syst. 99, 4599–4608. doi:10.1109/TPWRS.2020.2999890
Zhang, Y., Shi, X., Zhang, H., Cao, Y., and Terzija, V. (2022). Review on deep learning applications in frequency analysis and control of modern power system. Int. J. Elec Power 136, 107744. doi:10.1016/j.ijepes.2021.107744
Keywords: wind power, power grid, cloud model, load frequency control (LFC), dynamic performance
Citation: Li D, Lv X, Zhang H, Meng X, Xu Z, Chen C and Liu T (2024) Cloud model-based intelligent controller for load frequency control of power grid with large-scale wind power integration. Front. Energy Res. 12:1477645. doi: 10.3389/fenrg.2024.1477645
Received: 08 August 2024; Accepted: 05 September 2024;
Published: 13 September 2024.
Edited by:
Lipeng Zhu, Hunan University, ChinaReviewed by:
Bin Zhou, Hunan University, ChinaShiwei Xia, North China Electric Power University, China
Copyright © 2024 Li, Lv, Zhang, Meng, Xu, Chen and Liu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Haifeng Zhang, MjkyMjgxMzUwQHFxLmNvbQ==