 Rosabel Martinez-Roig
Rosabel Martinez-Roig Miguel Cazorla
Miguel Cazorla José María Esteve Faubel
José María Esteve Faubel- 1Department of General Didactic and Specific Didactics, University of Alicante, Alicante, Spain
- 2Institute for Computer Research, University of Alicante, Alicante, Spain
Introduction: Social robotics applied to the educational context deals with proposals that start from the present to shape the future of what training in a specific subject can be. On this occasion, the aim is to investigate the connection between the utilization of social robots and the teaching–learning processes that take place within a formal music education environment at any stage of education.
Methods: To carry out this research, the Preferred Reporting Items for Systematic reviews and Meta-Analysis (PRISMA) model served as a reference to perform a systematic review of articles published in two of the most important scientific databases, Web of Science (WoS) and Scopus, since 2015.
Results: A total of four articles fulfilled the inclusion criteria.
Discussion: Our findings attest that social robotics still remains a practically unknown topic. Hardly any experiences have been developed in classrooms. In general, it is considered necessary for education, and more specifically for music, not to be left out of the developments in social robotics. This technology, which is increasingly present in various areas of our society, responds to the objective of defining the 21st century, and musical education is part of it.
1. Introduction
Although the use of robotics in education can be described as an innovation, an extensive research base has already been generated around it (Lau et al., 2020; López-Belmonte et al., 2021; Arocena et al., 2022; Van den Heuvel et al., 2022). It is normal to think of experiences where students learn to design robots, thus developing their computational thinking (Acevedo-Borrega et al., 2022; Bati, 2022).
Nonetheless, the so-called “social robotics” has barely been implemented in the educational context as an innovative resource for the development of teaching–learning processes contextualized in today’s society (Smakman et al., 2022). We must bear in mind that the latter is characterized as being technological, which highlights the need to address the exploitation of any possibility related to digital technology (Roig-Vila et al., 2021; Alonso Ruiz et al., 2022; Cabezas-González et al., 2022). In fact, even though some experiences associated with social robotics can be found in various fields (Lau et al., 2020; Gasteiger et al., 2021; Choukou et al., 2023), a priori, education does not seem to be one of them.
Social robotics, therefore, introduces as a new area that is working its way into the educational scenario by proposing to use robots as assistants for teaching. Despite certainly having a large potential, numerous technological and ethical challenges must also be faced to achieve a widespread utilization of these robots as effective teaching tools that can help to improve instruction at any educational level. In the short run, by considering some of the research studies which have been undertaken (Azuar et al., 2019), the advantages brought by such robotic assistants mainly have to do with increasing students’ wellbeing. Regardless of which type of improvement in students’ overall training we may want to focus on, it would undoubtedly become interesting to directly examine experiences in which social robotics is used within a formal environment for the learning of a subject—Music, in our case.
We must not forget that music is not only regarded as an artistic teaching which beauty lies in its actual manifestation but also has proved beneficial in multiple aspects. By a way of example, concerning health, it enhances wellbeing and reduces stress; as for learning, music motivates students and predisposes them to learn other subjects (Chakraborty et al., 2021). Be that as it may, music teaching is essential for the comprehensive training of students. For this reason, any resource that we can use to offer new educational scenarios around music teaching will be welcome. In this case, our concerns revolve around the use of social robotics as an aid for this teaching, and it will be useful to know the research studies carried out in relation to this area so far.
Within this framework, a decision was made to carry out an analysis of bibliometric indicators which, according to García-Fernández et al. (2016), serves to study the degree of development achieved in a specific knowledge area. From a systematic review, the goal pursued with our study was to examine the educational experiences undertaken during the last few years with respect to the use of social robotics for music teaching inside a formal educational environment. Similar studies have been previously performed, such as the one authored by Lau et al. (2020), but that study had as its distinctive features the adoption of a scoping review format and the focus on the use of social robots in the treatment of children with diabetes.
The literature review proposed here consequently centers on searching for scientific articles listed on two databases: Web of Science (WoS) and Scopus. Its aim consists of providing a specific view of articles referring to experiences, programs, and actions where a social robot has acted as an assistant in music teaching. The results obtained will allow us to understand how things stand at present in relation to this topic.
To accomplish our purposes, this study is structured from a first section dedicated to the theoretical basis which starts with the most general aspects and subsequently deals with the most specific ones. Attention will be paid to the most relevant issues when it comes to social robotics, later focusing specifically on the key aspects of teaching as a whole, and more precisely music teaching, where the intervention of social robots comes into play. Because of all the aforementioned points, it will be possible to define more accurately the theoretical foundation which underpins this study.
Concerning methodology, the main postulates inherent to systematic literature review studies (Moreno et al., 2018; Higgins et al., 2021), especially those dictated by the PRISMA model, were followed. Hence, the references to inclusion and exclusion criteria, alongside data sources used and search strategies. Inclusion and exclusion criteria, data sources used and search strategies are presented. As for the results, attention will be paid to the characteristics of the music education experiences: the number of participants, the actors involved, the instruments used and the reported benefits. The article ends with a discussion and conclusion section. In short, we believe that this study can allow its readers to better understand the use of social robotics in the music classroom, thus helping to launch innovative proposals concerning music teaching in the technological society where we live.
1.1. Robotics in the educational context
The topic of robotics in the educational field is still relatively new, although the human–robot interaction (HRI) derived from its utilization already appears in numerous studies devoted to the achievements of robotics technology (Vlieghe, 2022). The experiences of learning with robots (Diago et al., 2018), as well as the development of the so-called computational thinking (Katai et al., 2021; Chiang et al., 2022; Christensen, 2022; Critten et al., 2022; de Carvalho et al., 2022; Huang and Qiao, 2022; Love et al., 2022), has led to identifying the potential of robots for their use as a new educational resource (Woo et al., 2021). It is what (Han and Jo, 2008), among others, call “robotic learning”—also shortened to “r-Learning.”
This has eventually resulted in the concept of “educational robotics,” a term that spans the different utilizations of robots within the formal educational context. On that basis, Gaudiello and Zibetti (2016)—quoted by Diago et al. (2018)—suggested three models for learning via educational robotics:
• “Learning robotics,” where students use robots as a means to learn contents specific to robotics or engineering;
• “Learning with robotics,” in which robots serve as the basis for the learning process; and
• “Learning by robotics,” where students achieve a series of objectives in any subject by means of robotics.
In our opinion, this threefold classification must be complemented by the contributions made by Tanaka et al. (2015) about the use of robots in education. According to these authors, the presence of robotics within educational environments has generally adopted two main formats, respectively, based on seeing robots as an (i) educational material and (ii) educational agents. This last consideration seems especially important to us because social robotics—around which this study revolves—is framed within this approach.
With regard to the aforementioned studies, as highlighted by Tanaka et al. (2015), the expression “educational agent” refers not only to the robots that act as teachers or teaching assistants and have been designed to give instructions to students but also to those destined to support students’ learning and study with them. In either case, they provide a social dimension that is lacking in other robots designed to initiate learners into robotics, programming, and electronics, such as Bee-Bot, Makeblock mBot, or Robo Wunderkind, to quote but a few.
1.2. Social robotics in the educational context
Social robots are seen as a technology that will gradually be integrated into every area of our society to provide us with assistance in numerous tasks. The robots are designed in such a way that they are able to socially interact with humans and thus simplify communication between human beings and machines, which, in turn, will increase their acceptance by users de Graaf and Allouch (2013). It is this characteristic of assistance and interaction with people that define a social robot as opposed to another type of robot. In addition, there are other characteristics such as humanoid appearance or human-like functions such as movement (Vlieghe, 2022). In this case, the current challenge for artificial intelligence is for the social robot to interact in a natural way—i.e., the way we humans interact with each other. Han and Jo (2008) described one of the first experiences with a robot for electronic learning that was available in the world, and Rofi’ah et al. (2021) more recently showed a case in which dialogue was used for verbal communication with an assistant robot within a hospital environment.
Among the so-called “social robots” are humanoid robots—e.g., those whose appearance resembles that of humans. NAO and Pepper are the best-known models belonging to this group. NAO, a humanoid robot, developed between 2005 and 2007, and presented at RoboCup 2008, was innovative at its time, both for its functions and because it had great freedom of movement. This could be verified at the Shanghai Expo of 2010 when 20 NAO robots danced to Ravel’s Bolero. In 2011, Aldebaran Robotics presented a new improved version, NAO Next Gen, with which the robot’s control source code was released so that anyone could contribute to this project.
Pepper is a humanoid robot designed and developed by SoftBank Robotics Corp. and Aldebaran Robotics SAS (Tanaka et al., 2015). Conceived as an emotional robot, it can communicate with human beings in a wide range of areas through its autonomous behavior, speech, and the skills associated with the emotional recognition function. This robot forms part of a macroproject oriented to help creators and developers from all over the world to compile and store applications, as well as contents and smart technological components so that they can be shared. This makes it possible to enlarge Pepper’s functions through the installation of new software and a set of applications known as “roboappli” (applications for robots), which is the main challenge for future investigations.
Pepper has been used in several domains, including the educational field. Thus, Tanaka et al. (2015) carried out a pilot test linked to English learning in which Pepper acted as an educational agent that learned with the participating children. They utilized three educational programs that the learners selected while interacting with the robot. In turn, Azuar et al. (2019) resorted to Pepper with the aim of modifying the evolution of a story according to the emotions detected in persons with intellectual disabilities. Similarly, Efstratiou et al. (2021) used Pepper to interact with children with an autism spectrum disorder in specially designed educational scenarios about monetary transactions. All these scenarios pursued to boost short- and long-term memory, alongside communicative and social skills, through exercises with coins and notes.
Another experience with Pepper was the study undertaken by Ujike et al. (2019), contextualized in Japan, where humanoid robots have entered the medical environment as well as that of seniors’ care. Their experience revolved around the implementation of a 40-min body–brain gymnastics recreation program adapted to the functional level of older adults. It consisted in moving, looking/curing, and playing. The exercise “move the body” and other active drills within the motion range were performed in conjunction with the music. In fact, when Pepper-CPGE was used, the following changes took place: the level of communication between patients and nurses during rehabilitation care increased; patients showed an interactive and committed attitude, actively participating in the attention prevention gymnastic exercises too, using Pepper-CPGE; patients had fun and enjoyed talking to Pepper-CPGE.
1.3. Robotics and music
Research into robotics and music is enjoying a boom (Cádiz et al., 2021) in the broad field of music research (Ilari, 2020). “Robotic music” focuses on developing the intelligence of machines, in terms of algorithms and cognitive models, with the aim of capturing the underlying principles of music perception, composition, and playing (Chakraborty et al., 2021). The ability of robots to manifest music in an artistically expressive manner, like that of humans, lies in a multidisciplinary field between engineering, computing, music, and sociology. The aspects being investigated include the musical robot and the human–robot interaction linked to new forms of creativity, exchange, and playing.
By way of example, Savery et al. (2021) analyzed the musician’s interaction with the robot before and after the performance, as well as between pieces. According to these scholars, these tasks involving a non-musical interaction, such as the presence of a robot during the configuration of the musical team, play a key role in the robot’s human perception. Another case of an experience shared by robots and humans can be found in Vear (2021), whose investigation centered on technical solutions and the artistic potential of artificial-intelligence-driven robots that co-create with a human musician who improvises (the author) in real time. Similarly, Chakraborty et al. (2021) delved deeper into one of the characteristics of musical performances in which musicians do not play rigidly, but play, move, and behave depending on the “feeling” of the music, and in tandem or according to non-verbal mutual gestures between them or from the main conductor. All of this requires an advanced level of cognitive operation for musical robots within such interactive, synchronized, and collaborative environments.
As for social robots and music, it is worth mentioning the study of Ribes et al. (2016) on performance. This time, the humanoid robot iCub listened to the human performance and subsequently learned on an incremental basis by means of imitation. This possibility of using the robot as a performer has been addressed in numerous studies. For instance, Fei et al. (2019) showed how a robot played an instrument called a dulcimer with a self-learning method whose training relied on data associated with three types of information: the tone of the adjacent notes, the time interval in a musical piece, and the decision results in the real processes of performance by human beings.
Scimeca et al. (2020), in turn, utilized a minimalist experimental platform based on a robotic arm equipped with a single elastic finger to examine on a systematic basis both motor control and the outcome resulting from piano sounds. Miller (2020) experimented with robots that played live neoclassical jazz combined with free improvisation. Finally, the study undertaken by Krzyżaniak (2020) resorted to swarms of autonomous musical robots for the purpose of analyzing human–robot and robot–robot interaction—e.g., when musical robots listen to, learn from, and respond to each other while improvising music together.
1.4. Robotics and music applied to education and other fields
Music and robotics make up a duo that is used in plenty of fields. Thus, from a perspective linked to health (music therapy), the utilization of robots provides a variety of possibilities. By way of example, Zhang et al. (2022) describe an experience that has to do with musical perception through gestural robotics. More precisely, they deal with a therapy of musical perception for autistic children that uses interactive gesture-controlled robots supported by the concept of educational psychology and deep learning technology.
Specifically in the educational context, robotics and music are addressed to connect them with other subjects. Thus, Torrejón Marín and Ventura-Campos, 2019 dealt with educational robotics in music teaching, in combination with mathematics. They used Bee-Bot robots with 3–7-year-old students who programmed the former so that they could move along boards and study with the musical contents proposed. In this way, they developed students’ logical-mathematical thinking and increased their motivation. Already-designed robots that help in learning other subjects may be utilized too. An example thereof is the experience carried out by Marques de Andrade et al., 2018, who created a robot for musical keyboards with the aim of providing more creative and interactive educational activities associated with physics teaching.
Park et al. (2015), in turn, pursued to develop a kind of robot-based learning with programming meant to improve students’ creativity and understand satisfaction in primary education classrooms. An instruction strategy was followed in this analysis that helped students to express learning contents about the Korean language, mathematics, and music in the movement of the educational robot with scratch-type programming so that learners could program the robot.
For their part, Chou and Chu (2017) proposed a percussion learning device that brings together tablets and robots and consists of two systems: one for the teaching of rhythms in which users can compose and practice rhythms using a tablet, and another for robot execution. First, the teachers type the rhythm training contents on the tablet. Then, the students do these percussion drills with a tablet and a small drumkit. The teaching system provides a new, easy-to-use score edition interface to compose a rhythm exercise. It additionally supplies a rhythm classification function that makes children’s percussion training easier and improves beat stability. Seeking to encourage learners to practice with percussion drills, a robotic action system is utilized to interact with the children which can perform percussion exercises so that learners can listen to them, subsequently helping the former to practice the exercise in question.
It must be remembered, however, that although evidence exists of the benefits that the use of robots can have in the educational context as a whole and particularly in the music area, no systematic reviews or meta-analyses seem to be available that allow us to study the experiences developed—more precisely regarding music teaching within a formal educational environment. In view of all the aforementioned points, it seems appropriate to undertake a systematic review of the educational experiences undertaken and their specific effects on the teaching–learning process. This will make it possible to ascertain some common aspects in the development of such processes, thus providing guidance for future experiences.
1.5. General objective and research questions
Based on all the considerations made so far, the following research questions can be posed:
• What educational experiences have been carried out in the formal context of music teaching from the use of social robots in the classroom?
• What are the characteristics of these educational experiences?
• Do the results of the identified research studies support more widespread use of robots in the music classroom?
The general objective of this study will consequently be to check the current level of knowledge about the utilization of social robots within the educational domain of music teaching. From this, general objectives are drawn and the three specific objectives are listed as follows:
• To identify the educational experiences in music teaching with social robots from a systematic review of the scientific literature contained in selected databases since 2015.
• To analyze the implementation of educational experiences in music teaching with social robots and their main features.
• To examine the evaluation performed in the educational experiences of music teaching with social robots.
Based on all the aforementioned points, and within the framework of a systematic review, the following hypothesis is launched: the use of social robots in formal music teaching has beneficial effects on students’ learning.
2. Method
2.1. Type of study. Design
A systematic literature review (Conn et al., 2003; O’Connor et al., 2008; Higgins and Green, 2012) was performed for the purpose of analyzing the most outstanding studies published in relation to the suggested research questions. This eventually enabled us to create a database with the selected sample, as recommended by Prendes-Espinosa et al. (2020). The study of this scientific review was approached “from descriptive and content analysis techniques” (Rivero et al., 2019) and took into account the previously formulated research questions. It was performed in accordance with the Preferred Reporting Items for Systematic reviews and Meta-Analysis (PRISMA) guidelines (Liberati et al., 2009; Moher et al., 2009; Tacconelli, 2010) in an attempt to carry out research as systematically as possible and accordingly provide guarantees for the whole procedure implemented from the defined methodological guidelines. As pointed out by Moher et al. (2009), PRISMA can serve as the basis to undertake systematic reviews of various fields, even though some modifications will have to be made—depending on each case—in the flow diagram and the verification list (the elements that permit to organize and structure the research process). In this case, we specifically refer to the items utilized in PRISMA’s standard verification list (Liberati et al., 2009; Urrútia and Bonfill, 2010): title, structured abstract, justification, objectives, protocol and recording, eligibility criteria, information sources, search, data compilation process, data list, risk of bias between studies, selection of studies, characteristics of studies, evidence summary, and limitations and conclusions.
2.2. Procedure
The requirements specified at the “Reglamento del Comité de Ética de la Investigación de la Universidad de Alicante” (Regulations of the Research Ethics Committee of the University of Alicante; BOUA, 2022) were followed at all times. Similarly, the procedure entailed going through a number of stages typical of systematic-review-based research studies, which are summarized as follows:
• Formulation of the problem to be examined: the first step is carried out by taking as a reference the research questions and objectives mentioned earlier. It is important to note that, before starting this research, we checked on the PROSPERO database1 that no reviews concerning these issues existed; the fact that it was a new study undertaken within the framework of a University Master’s Degree made us decide not to send this protocol to PROSPERO.
• Search for relevant studies from a set of sources and parameters suited to our research. To that end, we chose to use two of the most important scientific databases that will be specified in the following sections. Furthermore, several parameters were established that served to delimit the systematic review, namely the inclusion and exclusion criteria, based on which we carried out the literature search with the aim of selecting the studies that fulfilled such criteria. It needs to be highlighted that we had to make a number of changes in the process during this stage. Those changes were explicitly stated, together with their justification, to provide evidence that the results had by no means been affected by potential biases.
• Sample analysis: From the studies that complied with the respective inclusion criteria, the corresponding description and coding were carried out, which, in turn, allowed us to show the results.
• Interpretation: Taking into account both the results derived from coding and the objectives set, attention was paid to the consequent discussion as well as to drawing a conclusion.
2.3. Inclusion criteria
Following Prendes-Espinosa et al. (2020), “the criteria were: inclusion and exclusion, relevance, validity of studies, data description, removal of duplications, bias risk, application of Boolean operators and bilingual descriptors” (p. 11), in addition to implementing “the PICoS (population, phenomenon of interest, context, and study design) strategy” (p. 12). This makes it possible to identify and structure terms, which are relevant for searches (Martínez Díaz et al., 2016; Morris et al., 2021). More precisely, these were the inclusion criteria used in this systematic review as follows:
• With respect to the population:
o Time specification: A decision to analyze the period 2015–2022 was made for the purpose of extracting the most recent studies devoted to the research problem under study.
o The descriptive terms acceptable for the population had to contemplate the terminology referred to as social robotics and music.
o Type of document: articles.
o Access: open.
o Source: journal.
o Area(s): all.
o Publication language: English and Spanish.
• Concerning the phenomenon of interest: our study focused on experiences related to the use of social robotics in the music classroom. Hence, our decision to select only those studies which directly address this topic with programs, activities, experiences, and projects along those lines. For that reason, attention will exclusively be paid to their presence in the title, the abstract, or the keywords of the articles to be analyzed.
• Regarding context: the research concerned any educational level and referred to a formal environment.
• As for the design of the research study applied to investigate the corresponding experiences, all methods were admissible, including the case study, which we finally decided to include despite not having considered it at first due to the shortage of results obtained. Not only quantitative studies but also qualitative and mixed ones were selected, similarly contemplating longitudinal as well as individual research studies. With regard to evaluation tools for variable measurement, all of them were included regardless of whether they had a qualitative or quantitative nature, such as self-reports, ad hoc tests, validated tests, and interviews. In terms of results, all options and formats dealing with the benefits derived from the experience developed were considered.
Similarly, these inclusion criteria define the exclusion criteria. Thus, concerning the type of experience, we found publications about studies devoted to music and robotics in non-formal contexts (e.g., a performance), which were not taken into account.
2.4. Search strategy
2.4.1. Databases and descriptors
Using the design described earlier as a reference, the relevant records were identified from systematic reviews on the following electronic databases: Web of Science: Web of Science Core Collection [Social Sciences Citation Index (SSCI)], Emerging Sources Citation Index (ESCI), Science Citation Index Expanded (SCI-EXPA), and Scopus.
The same descriptors and parameters were used for the advanced search in the aforementioned databases, Boolean operators, and actions being adjusted on the same universe; in this case they were the title, abstract, and keywords. Table 1 lists the descriptors used from the semantic families.
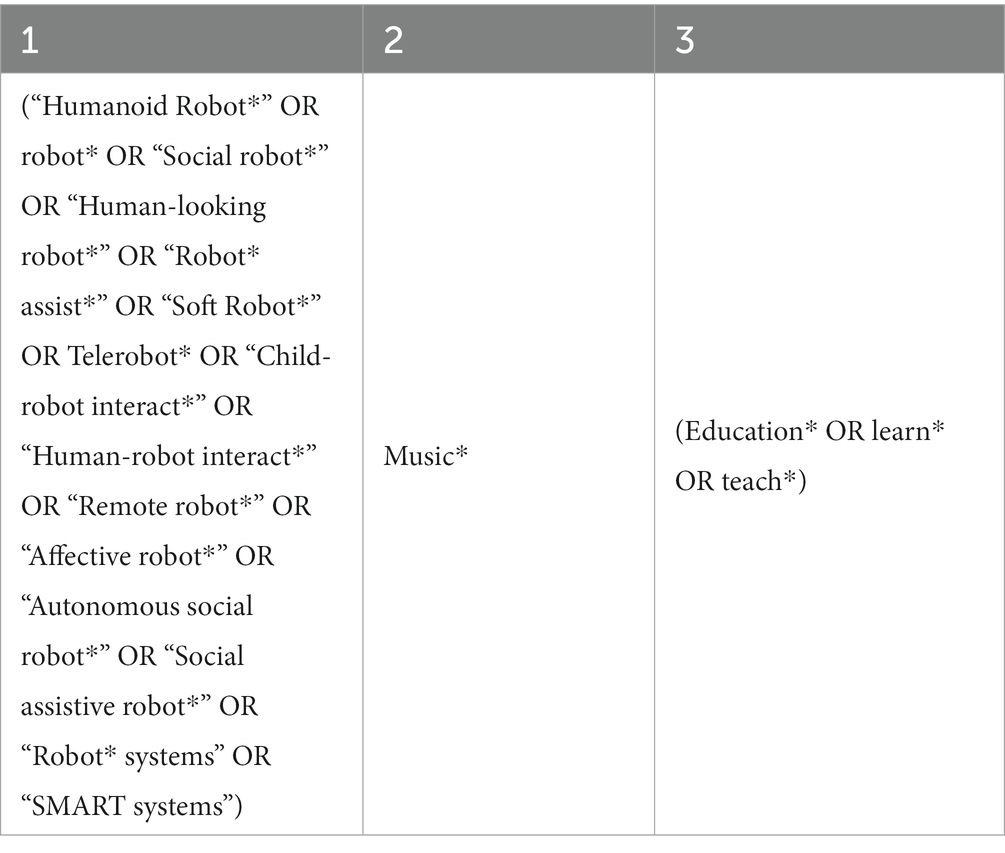
Table 1. List of descriptors used in the systematic review.
To avoid fugitive literature from the WoS and Scopus databases and following the indications of Pedraza-Navarro and Sánchez-Serrano (2022), a search was performed in other databases, but no new contributions to the results were located. Specifically, the sources consulted are indicated later and, in parentheses, the number of publications located according to the inclusion criteria used: Dialnet (4), ERIC (1), ProQuest (12), and DOAJ (34). After examining the articles, none of them alluded to the object of study of the present investigation, so they could not be added to the results.
2.4.2. Selection process
Although searches took place between February and April, the results were updated on 25 May 2022. A decision was made to apply the same search strategies to each and every database. More specifically, all three semantic families were included in the title, abstract, or keywords so that we could exactly replicate the search performed.
It deserves to be highlighted that in SCOPUS, we proceeded to filter the initial outcome—532 results—using the tools available on the interface of that database; or expressed differently, the search was confined to a series of filters (see Table 2). The result obtained in that way was 40 articles that we exported to our Mendeley account.
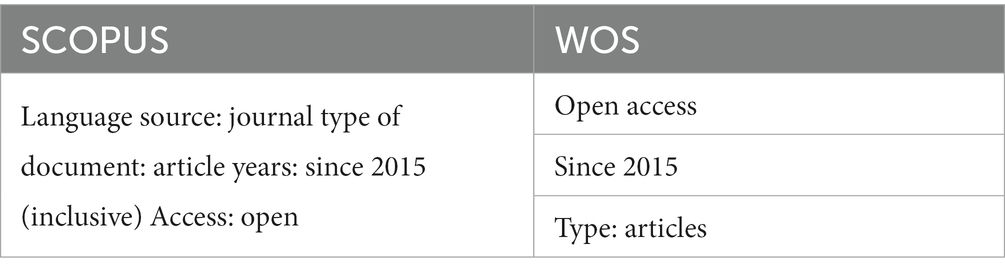
Table 2. Filters used in the systematic review.
As for WoS, we initially achieved 193 results. Once again, we proceeded to filter those results using the filters specific to the WoS interface (see Table 1), thus reducing the number to 29 results. The outcome of these searches shaped the corpus, with the emphasis being placed on removing duplications, examining all the titles and abstracts, and, finally, discarding those articles which were not of interest to us according to the inclusion and exclusion criteria.
Both the flow diagram and the information results obtained through the selection and review process are shown in accordance with the scheme proposed in PRISMA (Urrútia and Bonfill, 2010) and following the PICoS strategy (see Figure 1). A first descriptor-based search led to an initial population of 725 documents—with the following distribution by databases: Scopus: 532 and WoS: 193. After filtering or sifting in accordance with the previously specified inclusion criteria, the final sample contained 69 documents. Both the abstracts and/or the full texts of the remaining articles were examined to ascertain which of them fulfilled all the inclusion criteria—duplications were eliminated. A total of four were eventually selected, which provided us with a final sample of records to carry out the process of extraction of the data needed for the corresponding analysis. With that aim in mind, Microsoft Excel was utilized to add information on the basis of the coding and the information related to the sample’s descriptive data.
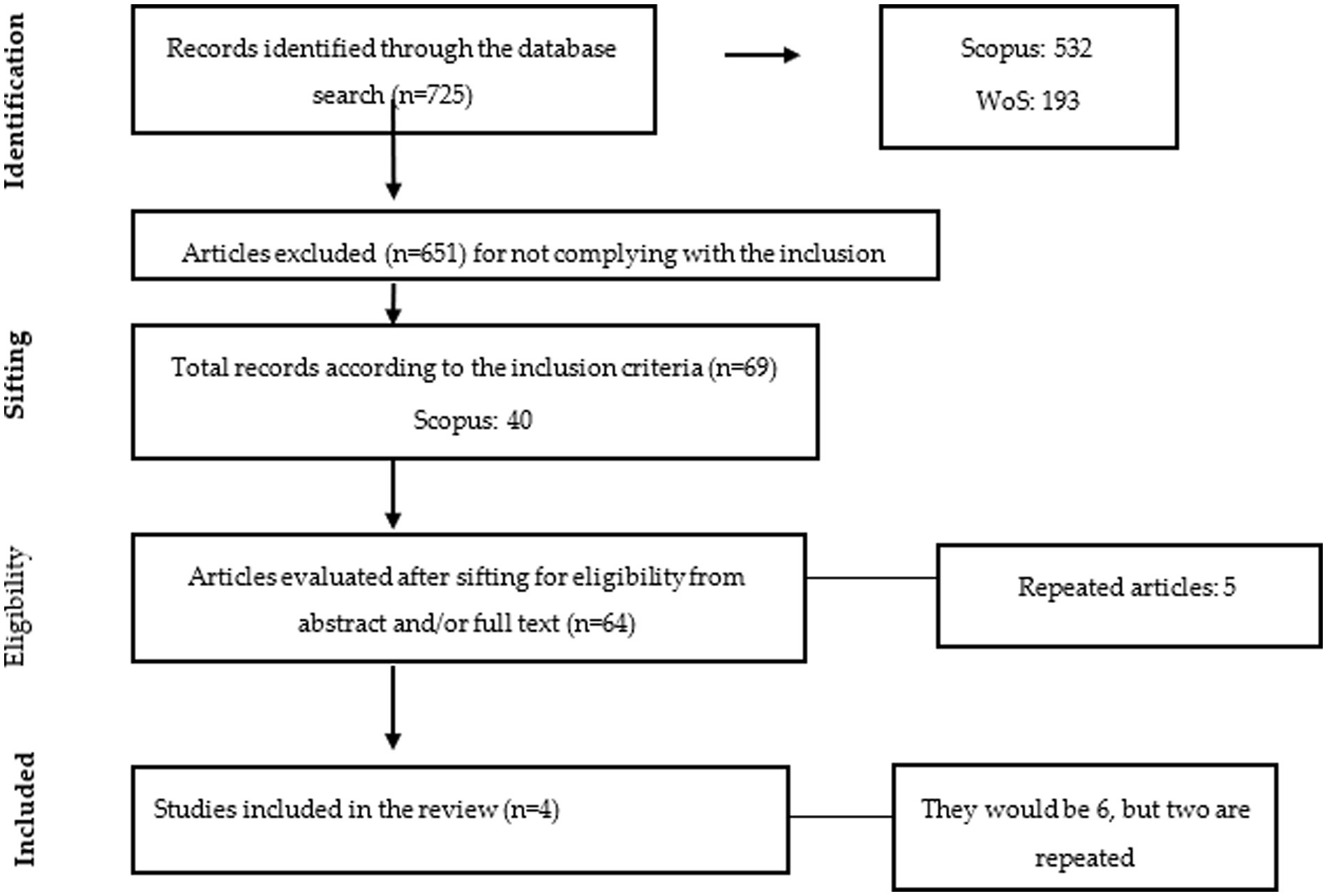
Figure 1. Flow diagram used [elaborated by the authors from a template developed by Moher et al. (2009)].
2.4.3. Databases and descriptors
From the search undertaken on the aforesaid databases, and taking into account all the inclusion and eligibility criteria, the final sample of studies selected in this systematic review contained four scientific articles (see Table 3), in view of which a search was carried out on another database with the aim of ensuring that the result reflected the existing literature on this topic. We thus performed the same search on EBSCO, the initial outcome being zero articles.
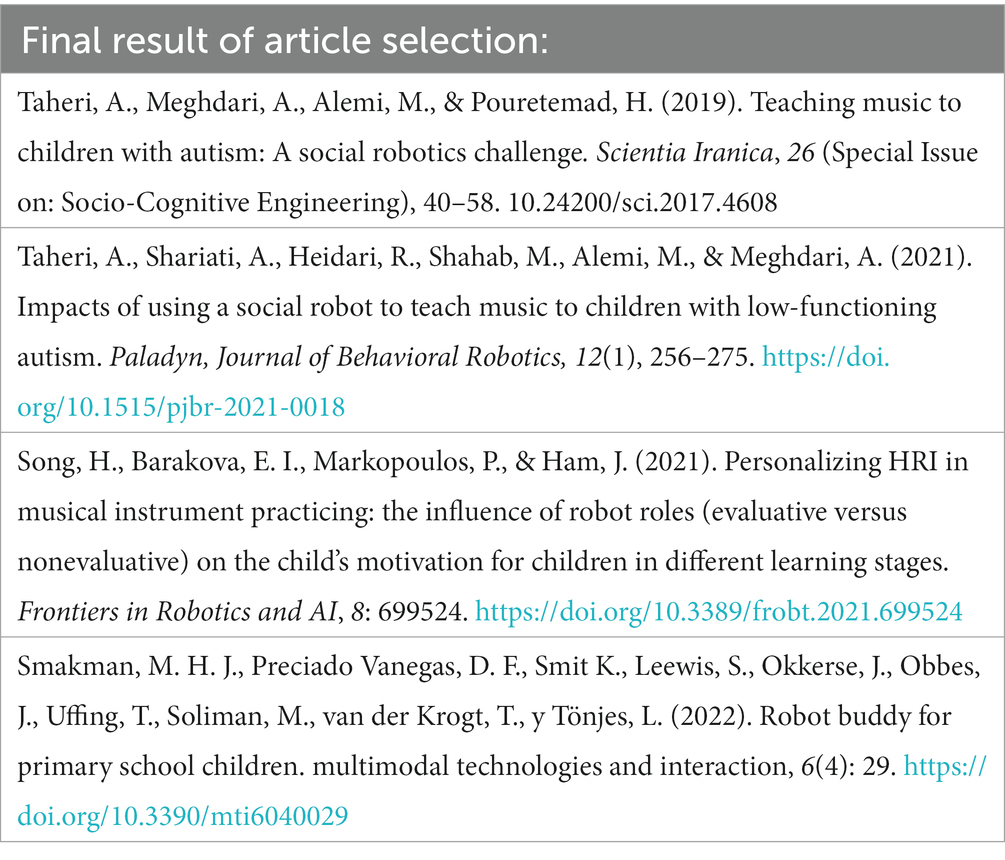
Table 3. Selected articles.
Our analysis of the sample under study began with the examination of the descriptive characteristics of the selected articles. To this end, we analyzed them from a series of variables: time distribution (year of publication), the scientific journal where it was published, and authorship (see Table 4).
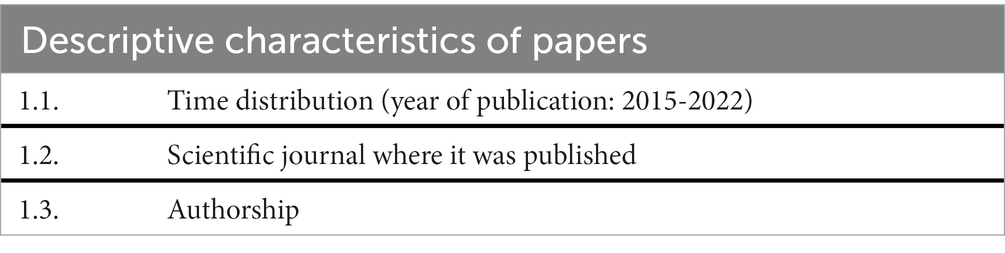
Table 4. Descriptive characteristics of articles.
Similarly, we performed a content or semantic analysis, which required coding the articles based on a set of variables related to the corresponding experiences with social robots. The three main categories refer to (a) the population to which the experience is addressed, (b) the characteristics of that experience, and (c) the design of the research undertaken around the experience in question.
As for the population, an analysis was carried out about the participants’ sociodemographic data, such as geographical location, age, gender, and the specific features of the target group in this experience. In relation to the characteristics of the latter, our attention focused on its motivation and objectives, as well as its duration and the musical aspects covered. We finally examined the evaluation of experiences, if any—an aspect analyzed too—method utilized, tools used for the evaluation, and the results thereof.
Finally, it is worth highlighting that this coding of records was performed in accordance with a series of categories which, despite having been defined beforehand, were updated gradually as we coded each article. This allowed us to identify the key topics and the most frequently used concepts, accordingly making it possible to carry out an in-depth study about the contents of the articles from a set of codes (see Table 5).
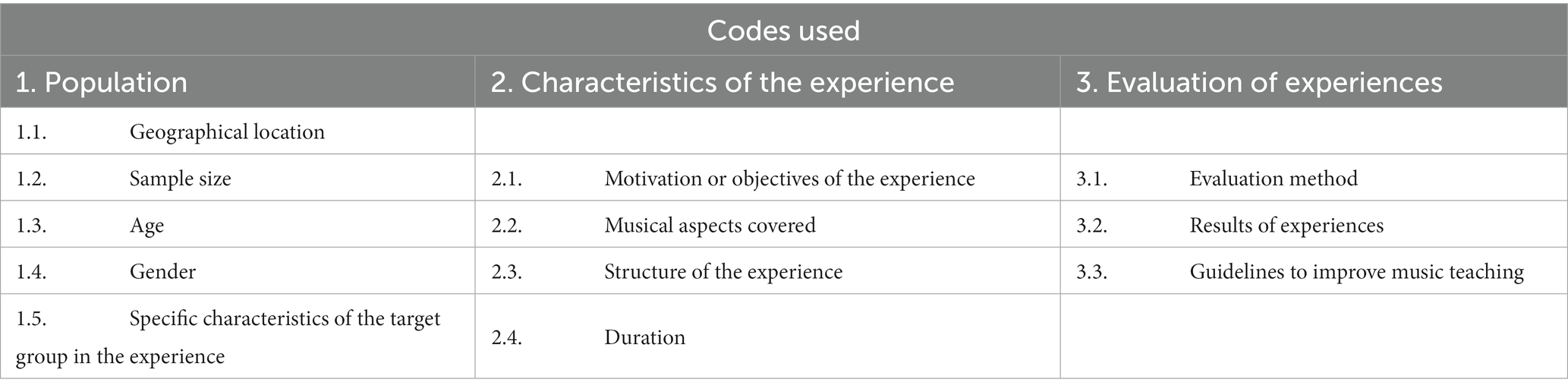
Table 5. Codes used to analyze the contents of articles.
3. Results
3.1. Identification of educational experiences with social robots in music
3.1.1. Population
Regarding geographical location, the development of the respective educational experiences was evenly distributed between Netherlands and Iran. To structure the sample results, the samples were grouped by intervals: <25, 26–50, 51–75, 76–100, and >100. More specifically, there are two experiences with four infants (Taheri et al., 2019, 2021). In both cases, they involved children diagnosed with ASD. In the 2019 experience, the authors highlighted that the children had no previous music learning background, they were able to understand/obey instructions, they had a minimum cognitive development of a 3-year-old child, and they could perform simple imitation movements. In addition, hey highlighted that two were excluded: one because he became frightened on the first day and the other due to problems between his parents. Song et al. (2021) worked with 31 children and Smakman et al. (2022) with 115 children.
In relation to the age variable, Taheri et al. (2019) established a minimum of 3.5 years; Taheri et al. (2021) situated it between 5 years and 1 month and 6 years and 5 months; and Song et al. (2021), between 9 and 12 years. In this last case, the participants were piano students—the other studies did not involve learners from music subjects. As for their level of expertise, children were divided into three different groups by learning stages (number of years studying piano) following the piano teachers’ suggestion, namely, beginners (less than 2 years, n = 11), developing musicians (between 2 and 4 years, n = 10), and advanced performers (over 4 years, n = 10). In turn, the experience described by Smakman et al. (2022) included two experiments about confidence between 4 and 6 years and stress between 3 and 6 years.
Regarding gender, no rules are repeated for this variable. In Taheri et al. (2019), all participants were boys; in Taheri et al. (2021), one girl and three boys took part; the study performed by Song et al. (2021) involved 15 girls and 16 boys, and that of Smakman et al. (2022), 26 boys and 29 girls in the experiment about confidence, and 30 boys and 30 girls in the experiment about stress.
3.1.2. Main aspects of the experience
3.1.2.1. Motivation or objectives of the intervention
Our approach to the reasons for—and the goals sought with—the implementation of the different experiences can be summarized around three areas: attention to special educational needs, the teaching of musical instruments, and human–robot interaction.
Thus, Taheri et al. (2019) set themselves the aim of teaching music to children with autism with two specific objectives: (1) to familiarize these learners with the foundations of music using a robot that played the xylophone and the drumkit as a teacher’s assistant, and (2) to improve the social and cognitive skills of those children with autism by means of active music games. Three questions served as the starting point for Taheri et al. (2021): (a) Does a humanoid robot acting as a teacher’s assistant have the ability to teach musical rhythms and notes to low-functioning autistic children? (b) Does robot-assisted music-based education impact on the social and cognitive skills of low-functioning autistic children? and (c) Can robot-assisted interventions affect the stress levels of low-functioning participants’ parents during music education classes?
Finally, Song et al. (2021) investigated whether or not children at different learning stages would have higher motivation when assisted by a robot playing various support roles: evaluative vs. non-evaluative role. They formulated the following research question: Can the different roles of robots (i.e., the evaluative role and the non-evaluative one) differently influence the motivation of children at various learning stages when practicing with instruments? Smakman et al. (2022) adopted a similar approach for the purpose of exploring children’s confidence with social robots, to which they added a second experiment focused on reducing their stress levels through the utilization of a social robot.
3.1.2.2. Duration
None of the experiences entailed a high number of sessions. The two experiences provided by Taheri et al. (2019, 2021) present the same sequence, with hardly any variations: there were two initial sessions without robot-assisted music teaching (week 1). Week 2 included a pre-test before introducing the robot in the guidance session. In total, nine sessions (between weeks 3 and 11) were followed, with interventions for each child. A post-test was carried out in the last session (i.e., week 11), and the follow-up test was 4 weeks later. Song et al. (2021) contemplated three sessions: the child practicing alone, assisted by the evaluative robot, or assisted by the non-evaluative robot (in a random order).
3.1.2.3. Robot used
In general, 50% of experiences utilized NAO H-21 (Taheri et al., 2019, 2021) while 25% resorted to SAMBuddy Storytelling Cuddle, a robot resembling a cuddly toy full of very basic hardware components (Smakman et al., 2022). Only in one case was a robot created ad hoc for the study; Song et al. (2021) presented a robot with two roles: evaluative (“categorical specific language, praising effort, with a slow, constant tone, and a calm facial expression, centering on practice, moving little, and dressing formally (that is, shirt)”); and non-evaluative (“indirect abstract language, praising talent, with a fast active tone and a funny facial expression, moving a lot and dressing informally (i.e., striped jersey)”).
3.1.2.4. Musical content covered in the experience
Learning to play a musical instrument was present in 75% of cases. Two experiences—carried out by the same research group (Taheri et al., 2019, 2021)—utilized the robot so that participants could learn to play a real drum/xylophone in robot–child or robot–child–therapist–parent imitation games; in turn, the children who took part in the study of Song et al. (2021), played the piano. Instead, the robot was used by Smakman et al. (2022) as an alternative activity to human beings listening to classical music, ultimately seeking to reduce stress. On this occasion, a child–robot interaction or a conventional music intervention—one of the interviewers playing the classic song “Comptine d’un autre été (Amélie)”—took place in separate rooms.
3.1.3. Evaluation of educational experiences with social robots in music
3.1.3.1. Evaluation method
We should ask ourselves whether or not these experiences have been evaluated and how. All of them (100%) are case studies. Regarding evaluation tools, Song et al. (2021) utilized the Situational Motivation Scale to measure four (motivation) dimensions: autonomy, pleasure, stress, and interest. Taheri et al. (2019) worked with three types of measurement tools, namely: evaluations toward the child of the kind “hit the drum and/or the xylophone using sticks.” The evaluations were performed by an expert in autism and a music teacher, both of them psychologists. They also used interviews with parents as well as three questionnaires validated in research on autism: the Gilliam Autism Rating Scale (GARS), used to estimate autism severity; Autism Social Skills Profile (ASSP) on the social behaviors of a 6–17-year-old individual with autism; and Parenting Stress Index-Short Form (PSI-SF) about parents’ stress.
Taheri et al. (2021) evaluated imitation and social communication skills, alongside regular imitation exercises, and the ability to reproduce rhythm. They used four questionnaires too, including the Autism Social Skills Profile, Gilliam Autism Rating Scale, Autism Verification List, and Parenting Stress Index-Short Form. Song et al. (2021) assessed motivation by means of a questionnaire and video data analysis. As for Smakman et al. (2022), they resorted to a questionnaire—before the interaction—about sociodemographic data and others related to age, grade, and gender, in which interviewees were similarly asked if they had ever seen a robot before; and if they had, they were expected to describe their previous experiences with them. Furthermore, they used an ad hoc prepared questionnaire adapted to the participating children to ascertain their state of mind and level of stress after the experiment; a research assistant carried out observations using an intervention monitoring scheme (robot and music).
3.1.3.2. Results of experiences
The outcome of the diverse interventions allowed us to verify that improvements concerning the objectives set had been achieved in all of them, although the difference was not significant in one case. As pointed out by Taheri et al. (2019), the robot NAO was able to teach notes/rhythms, parents’ stress decreased during sessions, and there were remarkable improvements in subjects’ social/cognitive skills. In their subsequent experience (2021), the children could not pass a test on music notes or the reading of musical phrases due to their cognitive deficit. However, they showed acceptable improvements in the Stambak Rhythm Reproduction Test, which means that some rhythm learning did occur.
The findings of Song et al. (2021) revealed a significant interaction between the conditions (i.e., alone, evaluative robot, and non-evaluative one) and the learning stage groups, which suggests that children belonging to groups situated at different learning stages have different levels of motivation when they practice on their own or with an evaluative or a non-evaluative robot. More specifically, the authors observed that beginners showed greater persistence when practicing with the non-evaluative robot, whereas advanced players expressed higher motivation after practicing with a robot than when doing so alone, though no differences appeared between the two robot roles. The exploratory results also pointed to the possibility of gender having an effect on interaction with robot roles in children’s motivation during music practice with social robots.
Smakman et al. (2022) found that, regardless of the robotic characteristics assessed (intonation, male/female voice, and humor), most children tend to trust a robot during their first interaction. Curiously enough, adding humor to robots’ dialogues seems to impact negatively on the confidence of children, especially when it comes to those who have had no previous experience with robots. It was in this experience that the comparison between a conventional music session and the interaction of a social robot revealed no outstanding differences. Both interventions managed to reduce children’s stress levels, albeit not to a significant extent.
4. Discussion and conclusion
This research aimed to review the scientific literature devoted to formal educational experiences where social robotics has been utilized in music teaching. From this general objective, a number of research questions were posed. Regarding the first question about which educational experiences have been undertaken through the use of social robots in classrooms, our study relied on a systematic review of the scientific literature since 2015 on two of the most important databases available in the educational context: WoS and Scopus. In relation to this question, and following the PRISMA model guidelines, 69 studies were located—65 after removing duplications. Faced with such a small number, the titles, abstract, and/or full texts were directly reviewed to confirm that they referred to the topic under analysis in accordance with the inclusion and eligibility criteria. This left us with four, all of which fulfilled the inclusion criteria.
In this way, we could establish which articles were going to be reviewed. As can be seen, it was not a large sample; however, this result matched that of other similar studies, such as those authored by Rosili et al. (2021) and Lau et al. (2020). Thus, the selected studies were Taheri et al. (2019, 2021), Song et al. (2021), and Smakman et al. (2022).
Concerning the second question, which referred to the specific characteristics of these educational experiences, a description was carried out of the articles that made up our sample according to their time distribution, the scientific journal in which they had been published, and their authorship; these aspects were already considered by other authors in their respective systematic reviews (Prendes-Espinosa et al., 2020). It deserves to be highlighted that, contrary to our expectations, we failed to obtain an upward evolution of publications, especially because of the increasingly advanced technological environment where we live. On the whole, we agree with Han and Jo (2008) that a need exists to investigate the topic around which this study revolves. We are surrounded by technology and social robotics arises as an expanding field. Hence, the usefulness of localized studies is to analyze the scientific evidence available and look for strengths and weaknesses in the corresponding experiences. Due to this, tests with robots in the music classroom can gradually adapt to the specific needs of each discipline and accordingly become an integrated, reality-based teaching format.
On the other hand, it should be noted that in the selected educational experiences the “social” value of the robot used stands out. In concurrence with other research (Azuar et al., 2019), the wellbeing of the students is improved by the characteristics of these robots. The appearance of the robots used, similar to that of humans, and the type of programming, which allows the interpretation of certain social behaviors, contribute to this objective. As found in other studies (de Graaf and Allouch, 2013; Park et al., 2015; Efstratiou et al., 2021), there is an increase in the motivation of users—in our case, children in a musical learning context.
Delving into other characteristics of any educational experience, such as the role of the educational community and the collaboration of families, it should be noted that these variables have not been considered in the studies found. In general, families appear involved in studies referring to social robots when these are used as support in the home (Gasteiger et al., 2021; Choukou et al., 2023).
As for the third and last question on whether the results of the identified research studies support a more widespread utilization of robots in the music classroom, an affirmative answer can be inferred. Thus, as highlighted by Taheri et al. (2019), the progress achieved in this preliminary exploratory study confirmed the potential benefits derived from using social robots and smart technologies as facilitators in music teaching and cognitive rehabilitation. However, some reviews highlight that robots are rarely implemented for long periods of time in the classroom (Woo et al., 2021). This precludes securing the potential advantages of using robotics in music and other related areas.
Similarly, to give a more detailed answer to this question, we analyzed each experience described in the respective articles based on the coding designed. More precisely, attention was paid to various aspects referred to the population, such as sample, gender, and geographical location. At this point, it is important to highlight the disparity with regard to the characteristics of the target population: sometimes students with certain psychosocial features, and on other occasions, students enrolled in music subjects. Therefore, we could not define a common reference framework for the target population, which is not the case for other topics related to social robotics in the educational context, such as care for people with autism spectrum disorder, a topic widely addressed in the scientific literature (Woo et al., 2021; Zhang et al., 2022).
As regards the objectives of the respective experiences, they were analyzed and proved to respond to the needs and interests of students who receive music teaching, both in terms of learning to play musical instruments and listening to classical music. As for the number of participants, it was not high, as happens in most of the studies about social robotics (Lau et al., 2020).
An aspect worth highlighting is that we analyzed the evaluation of experiences seeking to find evidence of the possible advantages brought by the utilization of robotics in music. With this aim in mind, coding was performed in accordance with the following codes: evaluation method, results of interventions, and benefits derived from them. In every article, the diverse case studies added high value in regard to the direct and indirect link between music and school.
After the findings were obtained and the discussion was carried out, it becomes necessary to state that the working hypothesis that we formulated has been confirmed in light of the results already explained earlier. Furthermore, the four experiences examined suggest that the use of social robots in formal music teaching benefits children’s learning, an aspect that coincides with previous studies referring, in general, to the benefits of music (Ilari, 2020).
Regarding the thorough review performed, it seems interesting to identify the guidelines that can be drawn from it and prove helpful for the design of experiences with social robots in music. In this sense, a positive assessment is given to the “social” value of the robot type proposed for music teaching so as to ensure success in these experiences. Similarly, this social value of the robot is highlighted in previous educational research (Azuar et al., 2019; Efstratiou et al., 2021; Rofi’ah et al., 2021). We concur with Ujike et al. (2019) on the prominent motivational value of the Pepper robot.
Similarly, it seems advisable to undertake experiences focused on the whole educational community with the aim of acquiring knowledge and experimenting from a specific school project, assigning robots the status of members of that same community, as reported by Arocena et al. (2022), Lau et al. (2020), López-Belmonte et al. (2021), and Van den Heuvel et al. (2022). Benefits can also be obtained from collaborating with parents and other people actively involved in students’ life (Gasteiger et al., 2021). As for the evaluation of experiences, it would be interesting to monitor them on a long-term basis to check if the improvements in music teaching are permanent. As Woo et al. (2021) highlight, this temporal dimension is needed. In any case, an initiative of this kind requires the involvement and training of teachers, as well as the acceptance of the robots to be used, so that learners can improve their musical skills and capabilities.
Finally, we would like to highlight that the studies under examination provided evidence of positive effects on students’ learning in the educational context related to music. This is also noted in previous studies (Cádiz et al., 2021; Chakraborty et al., 2021; Savery et al., 2021). Nonetheless, these results must be interpreted very cautiously, due to the limitations to generalize them because the sample used is so small. On the contrary, this low number of research studies equally makes clear the need for more studies involving the implementation of experiences associated with music and social robots and the assessment of their effectiveness, as addressed by Arocena et al. (2022). This could serve to replicate research initiatives and acquire a more complete understanding of how teaching–learning processes should develop to ensure high quality. Be that as it may, all four articles analyzed definitely exemplify good practices around the use of social robots in the music classroom.
In our case, and despite the current difficulty to evaluate robots’ ability to directly influence learning results in music, it can be interesting to delve deeper into these possibilities already. Social robotics in education appears as a viable resource in the future. In this sense, we agree with several previous studies (Tanaka et al., 2015; Azuar et al., 2019) that point to this. Hence, the potential usefulness of this study is in breaking new ground.
4.1. Limitations and proposals for future
This study faced certain limitations, which are specified in the following paragraphs. The first one related to the small sample size and the consequent effect on the generalization of results. Although plenty of time was dedicated to trying and finding a larger sample of articles about this topic (based on the previously established inclusion criteria), the shortage of publications devoted to this field was verified. We could have modified the criteria or the topic, but that would not have been in keeping with the objective set at first. In fact, it became necessary to clarify some aspects because, when the research study was in full swing, we realized that certain aspects—e.g., academic performance—had initially not been addressed in a proper manner.
Another limitation worth highlighting had to do with the databases used. Although those sources are seen as two of the most important ones currently available to the scientific community, we did not resort to other possible sources. Moreover, we included references in English and Spanish; even though the former is the most widely used language in the scientific domain, references in other languages were excluded.
In addition to the aforementioned limitations, we are well aware that—as stressed in the PRISMA model—this type of research has an author-based bias since it is a “complex process that entails numerous assessments and decisions” (Urrútia and Bonfill, 2010: 508). As explained by these authors, “with the aim of minimizing the bias risk during the review process, such assessments and decisions should not be influenced by the results obtained in the articles included in the review” (Urrútia and Bonfill, 2010: 508). That is what we tried to do at all times, actually, but we may have introduced some bias in our study, perhaps because of our lack of experience in such research studies. It would be necessary to carry out a study in which different evaluators could take part and also apply agreement measures (Morris et al., 2021).
Along these same lines, we would like to clarify that no biases have been introduced in the protocol. The latter was established a priori and, although we did not publish it, as suggested in the Cochrane model (Urrútia and Bonfill, 2010), it was transparent and did not change a posteriori because we knew that those changes would affect the results in some way or other. Urrútia and Bonfill (2010) insisted on the fact that “such decisions are very likely to introduce biases and must be avoided” (p. 508). That is what we did, explaining the changes made and their justification in the methodology section. In particular, before undertaking this research study, we made sure that there were no other reviews on this same topic so that duplications could be prevented. In this regard, we were unable to carry out an optimal “assessment of the bias risk at the level of studies or results” (Urrútia and Bonfill, 2010: 508), insofar as these studies were not performed following the same methodological approach, which makes it very difficult to compare both the studies themselves and their findings. After all, we have case studies as well as the application of certain standardized tests.
Added to the aforementioned points, some biases do exist in relation to the publications that shape the sample. We did not systematize the evaluation of methodological quality referred to the results which were relevant for each one of the selected studies by means of published rating scales (Morris et al., 2021). Apart from the lack of knowledge required to do this with sufficient certainty that the procedure was implemented correctly, the existence of methodological heterogeneity in the interventions largely hindered the evaluation of that methodological quality.
Despite its limitations, this study has implications that deserve to be considered when it comes to the use of social robotics in music teaching. That is why a future research line could contemplate directly utilizing a social robot in a classroom with different educational levels, from infant education to university teaching. It would be a way to supply additional perspectives and reflections about the experiences developed. Another potential path for research consists in giving voice to those students who experiment with social robots so that they could express their feelings and perceptions, among other things.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary material, further inquiries can be directed to the corresponding author/s.
Author contributions
RM, MC, and JE contributed to the conception and design of the study. RM conducted the literature search and wrote the first draft of the manuscript. MC and JE wrote sections of the Introduction and supervised the whole process. All authors contributed to the article and approved the submitted version.
Funding
This study has been funded by the “Methodology for Emotion-Aware Education Based on Artificial Intelligence” (Programa PROMETEO 2022—CIPROM/2021/017, Conselleria de Innovación, Universidades, Ciencia y Sociedad Digital de la Generalitat Valenciana, Spain) and the “Programa Redes 2022–23, ICE de la Universidad de Alicante (Ref. 5780).”
Conflict of interest
The authors declare that the study was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
References
Acevedo-Borrega, J., Valverde-Berrocoso, J., and Garrido-Arroyo, M. D. C. (2022). Computational thinking and educational technology: a scoping review of the literature. Educ. Sci. 12:39. doi: 10.3390/educsci12010039
Alonso Ruiz, R., de Jubera, S., Ocón, M., Emeterio M., V. S., and Ponce de León Elizondo, A. (2022). Digital leisure: an opportunity for intergenerational well-being in times of pandemic? J. New Approaches Educ. Res. 11, 31–48. doi: 10.7821/naer.2022.1.806
Arocena, I., Huegun-Burgos, A., and Rekalde-Rodriguez, I. (2022). Robotics and education: a systematic review. Tem J.-Technol. Educ. Manag. Inf. 11, 379–387. http://dx.doi.org/10.18421/TEM111-48
Azuar, D, Gallud, G, Escalona, F, Escalona, F, and Cazorla, M. Story-telling social robot with emotion recognition capabilities for the intellectually challenged In: M. F. Silva, J. L. Lima, L. Paulo Reis, A. Sanfeliu, and Y D. Tardioli, editors. Robot 2019: Fourth Iberian Robotics Conference Advances in Robotics; 2019 Volume 1. p. 12–20.
Bati, K. (2022). A systematic literature review regarding computational thinking and programming in early childhood education. Educ. Inf. Technol. 27, 2059–2082. doi: 10.1007/s10639-021-10700-2
BOUA, Boletín Oficial de la Universidad de Alicante (2022). Disposición General [Consejo de Gobierno]. Reglamento del Comité de Ética de la Investigación de la Universidad de Alicante, 31 de marzo de 2022. https://bit.ly/387pgS8
Cabezas-González, M., Casillas-Martín, S., and García-Valcárcel Muñoz-Repiso, A. (2022). Mediation models predicting the level of digital competence of 12-14 year old schoolchildren in the area of digital problem solving. J. New Approaches Educ. Res. 11, 165–185. doi: 10.7821/naer.2022.7.789
Cádiz, R. F., Macaya, A., Cartagena, M., and Parra, D. (2021). Creativity in generative musical networks: evidence from two case studies. Front. Robot. AI. 8:680586. doi: 10.3389/frobt.2021.680586
Chakraborty, S., Dutta, S., and Timoney, J. (2021). The cyborg philharmonic: synchronizing interactive musical performances between humans and machines. Humanit. Soc. Sci. Commun. 8:74. doi: 10.1057/s41599-021-00751-8
Chiang, F. K., Zhang, Y., Zhu, D., Shang, X., and Jiang, Z. (2022). The influence of online STEM education camps on students’ self-efficacy, computational thinking, and task value. J. Sci. Educ. Technol. 31, 461–472. doi: 10.1007/s10956-022-09967-y
Chou, C.-H., and Chu, Y.-L. (2017). Interactive rhythm learning system by combining tablet computers and robots. Appl. Sci. 7:258. doi: 10.3390/app7030258
Choukou, M., Olatoye, F., Urbanowski, R., Caon, M., and Monnin, C. (2023). Digital health technology to support health care professionals and family caregivers caring for patients with cognitive impairment: scoping review. JMIR Ment. Health 10:e40330. doi: 10.2196/40330
Christensen, D. (2022). Computational thinking to learn environmental sustainability: a learning progression. J. Sci. Educ. Technol. 32, 26–44. doi: 10.1007/s10956-022-10004-1
Conn, V. S., Isaramalai, S., Rath, S., Jantarakupt, P., Wad-Hawan, R., and Dash, Y. (2003). Beyond medline for literature searches. J. Nurs. Scholarsh. 35, 177–182. doi: 10.1111/j.1547-5069.2003.00177.x
Critten, V., Hagon, H., and Messer, D. (2022). Can pre-school children learn programming and coding through guided play activities? A case study in computational thinking. Early Childhood Educ. J. 50, 969–981. doi: 10.1007/s10643-021-01236-8
de Carvalho, K. B., Basílio, V. T., and Santos Brandão, A. (2022). Action recognition for educational proposals applying concepts of social assistive robotics. Cogn. Syst. Res. 71, 1–8. doi: 10.1016/j.cogsys.2021.09.002
de Graaf, M. M. A., and Allouch, S. B. (2013). Exploring influencing variables for the acceptance of social robots. Robot. Auton. Syst. 61, 1476–1486. doi: 10.1016/j.robot.2013.07.007
Diago, P. D., Arnau, D., and González-Calero, J. A. (2018). Elementos de resolución de problemas en primeras edades escolares con Bee-bot. Edma 0-6. Educación Matemática en la Infancia 7, 12–41. doi: 10.24197/edmain.1.2018.12-41
Efstratiou, R., Efstratiou, R., Karatsioras, C., Papadopoulou, M., Papadopoulou, C., Lytridis, C., et al. (2021). “Teaching daily life skills in autism Spectrum disorder (ASD) interventions using the social robot pepper” in Robotics in Education. RiE 2020. Advances in Intelligent Systems and Computing. eds. W. Lepuschitz, M. Merdan, G. Koppensteiner, R. Balogh, and D. Obdržálek, vol. 1316 (Cham: Springer)
Fei, T., Chen, X., and Zhou, L. (2019). Neural network based online anthropomorphic performance decision-making approach for dual-arm dulcimer playing robot. J. Adv. Comput. Intell. Intell. Informat. 23, 838–846. doi: 10.20965/jaciii.2019.p0838
García-Fernández, J. M., Inglés, C. J., Vicent, M., Gonzálvez, C., Gómez-Núñez, M. I., and Poveda-Serra, P. (2016). Perfeccionismo durante la infancia y la adolescencia. Análisis bibliométrico y temático (2004-2014). Revista Iberoamericana de Psicología y Salud 7, 79–88. doi: 10.1016/j.rips.2016.02.001
Gasteiger, N., Loveys, K., Law, M., and Broadbent, E. (2021). Friends from the future: a scoping review of research into robots and computer agents to combat loneliness in older people. Clin. Interv. Aging 16, 941–971. doi: 10.2147/CIA.S282709
Gaudiello, I., and Zibetti, E. (2016). “Learning robotics, with robotics, by robotics” in Learning Robotics, with Robotics, by Robotics: Educational Robotics, vol. 3 (Hoboken, NJ, USA: John Wiley & Sons, Inc.)
Han, J.-H., and Jo, M. (2008). Comparative study on the educational use of home robots for children. J. Inf. Process. Syst. 4, 159–168. doi: 10.3745/JIPS.2008.4.4.159
Higgins, J. P. T., and Green, S. (Eds.) (2012). Cochrane Handbook for Systematic Reviews of Interventions. The Cochrane Collaboration.
Higgins, J. P. T., Thomas, J., Chandler, J., Cumpston, M., Li, T., Page, M. J., et al. (2021). Cochrane Handbook for Systematic Reviews of Interventions Version 6.2 (Updated February 2021). Cochrane.
Huang, X., and Qiao, C. (2022). Enhancing computational thinking skills through artificial intelligence education at a STEAM high school. Sci. Educ. doi: 10.1007/s11191-022-00392-6
Ilari, B. (2020). Longitudinal research on music education and child development: contributions and challenges. Music Sci. 3:205920432093722. doi: 10.1177/2059204320937224
Katai, Z., Osztian, E., and Lorincz, B. (2021). Investigating the computational thinking ability of young school students across grade levels in two different types of Romanian educational institutions. J. New Approaches Educ. Res. 10, 214–233. doi: 10.7821/naer.2021.7.640
Krzyżaniak, M. (2020). Musical robot swarms, timing, and equilibria. J. New Music Res. 50, 279–297. doi: 10.1080/09298215.2021.1910313
Lau, Y., Chee, D., Chow, X. P., Wong, S. H., Cheng, L. J., and Lau, S. T. (2020). Humanoid robot-assisted interventions among children with diabetes: a systematic scoping review. Int. J. Nurs. Stud. 111:103749. doi: 10.1016/j.ijnurstu.2020.103749
Liberati, A., Altman, D. G., Tetzlaff, J., Mulrow, C., Gøtzsche, P. C., Ioannidis, J. P., et al. (2009). The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate healthcare interventions: explanation and elaboration. PLoS Med. 6:e1000100. doi: 10.1371/journal.pmed.1000100
López-Belmonte, J., Segura-Robles, A., Moreno-Guerrero, A.-J., and Parra-González, M.-E. (2021). Robotics in education: a scientific mapping of the literature in web of science. Electronics 10:291. doi: 10.3390/electronics10030291
Love, T. S., Bartholomew, S. R., and Yauney, J. (2022). Examining changes in teachers’ beliefs toward integrating computational thinking to teach literacy and math concepts in grades K-2. J. STEM Educ. Res. 5, 380–401. doi: 10.1007/s41979-022-00077-3
Marques de Andrade, T. G., Santos Vicente, Z. R., Lemos Leite, H. A., Chaves Cabral, A. P., Baldow, R., Rocha, N., et al. (2018). A robótica livre e o ensino de física e de programação: desenvolvendo um teclado musical eletrônico free robotics and the teaching of physics and program. Belo Horizonte 11, 317–330. doi: 10.17851/1983-3652.11.3.317-330
Martínez Díaz, J. D., Ortega Chacón, V., and Muñoz Ronda, F. J. (2016). El diseño de preguntas clínicas en la práctica basada en la evidencia: modelos de formulación. Enfermería Global 15, 431–438. doi: 10.6018/eglobal.15.3.239221
Miller, B. (2020). “All of the rules of jazz”: stylistic models and algorithmic creativity in human-computer improvisation music. Theor. Online 26:3. doi: 10.30535/mto.26.3.6
Moher, D., Liberati, A., Tetzlaff, J., and Altman, D. G., The PRISMA Group (2009). Preferred reporting items for systematic reviews and meta-analyses: the PRISMA statement. PLoS Med. 6:e1000097. doi: 10.1371/journal.pmed.1000097
Moreno, B., Muñoz, M., Cuellar, J., Domancic, S., and Villanueva, J. (2018). Revisiones Sistemáticas: definición y nociones básicas. Revista Clínica de Periodoncia, Implantología y Rehabilitación Oral 11, 184–186. doi: 10.4067/S0719-01072018000300184
Morris, S., O’Reilly, G., and Nayyar, J. (2021). Classroom-based peer interventions targeting autism ignorance, prejudice and/or discrimination: a systematic PRISMA review. Int. J. Inclusive Educ., 1–45. doi: 10.1080/13603116.2021.1900421
O’Connor, D., and Green, S., and Higgins, J. P. T. (2008). Defining the review question and developing criteria for including studies. En J. P. T. Higgins and Y S. Green (eds.). Cochrane Handbook for Systematic Reviews of Interventions 83–94. Wiley-Blackwell
Park, I., Kim, D., Oh, J., Jang, Y., and Lim, K. (2015). Learning effects of pedagogical robots with programming in elementary school environments in Korea. Indian J. Sci. Technol. 8, 1–5. doi: 10.17485/ijst/2015/v8i26/80723
Pedraza-Navarro, I., and Sánchez-Serrano, S. (2022). Análisis de las publicaciones presentes en WoS y Scopus. Posibilidades de búsqueda para evitar literatura fugitiva en las revisiones sistemáticas. RiiTE Revista Interuniversitaria de Investigación en Tecnología Educativa 13, 41–61. doi: 10.6018/riite.548361
Prendes-Espinosa, M., García-Tudela, P., and Solano-Fernández, I. (2020). Gender equality and ICT in the context of formal education: a systematic review. (Igualdad de género y TIC en contextos educativos formales: Una revisión sistemática). Comunicar 28, 9–20. doi: 10.3916/C63-2020-01
Ribes, A., Cerquides, J., Demiris, Y., and López de Mántaras, R. (2016). Active learning of object and body models with time constraints on a humanoid robot. Trans. Cognitive Dev. Syst. 8, 26–41. doi: 10.1109/TAMD.2015.2441375
Rivero, M. A., Behr, A., and Pesce, G. (2019). Gestión de la educación a distancia: revisión sistemática de la literatura. Gestión Universitaria 12, 1–30.
Rofi’ah, B., Fakhrurroja, H., and Machbub, C. (2021). Dialogue management using reinforcement learning. TELKOMNIKA Telecommun., Comput., Electron. Control 19, 931–938. doi: 10.12928/telkomnika.v19i3.18319
Roig-Vila, R., Romero-Guerra, H., and Rovira-Collado, J. (2021). BookTubers as multimodal Reading influencers: an analysis of subscriber interactions. Multimodal Technol. Interact. 5:39. doi: 10.3390/mti5070039
Rosili, N., Zakaria, N., Hassan, R., Kasim, S., Rose, F., and Sutikno, T. (2021). A systematic literature review of machine learning methods in predicting court decisions. IAES Int. J. AI. 10, 1091–1102. doi: 10.11591/ijai.v10.i4.pp1091-1102
Savery, R., Zahray, L., and Weinberg, G. (2021). Before, between, and after: enriching robot communication surrounding collaborative creative activities. Front. Rob. AI. 8:662355. doi: 10.3389/frobt.2021.662355
Scimeca, L., Ng, C., and Lida, F. (2020). Gaussian process inference modelling of dynamic robot control for expressive piano playing. PLoS One 15:e0237826. doi: 10.1371/journal.pone.0237826
Smakman, M. H. J., Preciado Vanegas, D. F., Smit, K., Leewis, S., Okkerse, J., Obbes, J., et al. (2022). Robot buddy for primary school children. Multimodal Technol. Interact. 6:29. doi: 10.3390/mti6040029
Song, H., Barakova, E. I., Markopoulos, P., and Ham, J. (2021). Personalizing HRI in musical instrument practicing: the influence of robot roles (evaluative versus nonevaluative) on the Child’s motivation for children in different learning stages. Front. Rob. AI. 8:699524. doi: 10.3389/frobt.2021.699524
Tacconelli, E. (2010). Systematic reviews. CRD’s guidance for undertaking reviews in health care. Lancet 10:226. doi: 10.1016/S1473-3099(10)70065-7
Taheri, A., Meghdari, A., Alemi, M., and Pouretemad, H. (2019). Teaching music to children with autism: a social robotics challenge. Scientia Iranica 26, 40–58. doi: 10.24200/sci.2017.4608
Taheri, A., Shariati, A., Heidari, R., Shahab, M., Alemi, M., and Meghdari, A. (2021). Impacts of using a social robot to teach music to children with low-functioning autism. Paladyn, Journal of Behavioral Robotics 12, 256–275. doi: 10.1515/pjbr-2021-0018
Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R., and Hayashi, K. Pepper learns together with children: development of an educational application. In: Humanoids; 2015. Vol. 2015, p. 270–275.
Torrejón Marín, M. F., and Ventura-Campos, N. (2019). Enseñanza-aprendizaje músico-matemático utilizando robótica educativa. 3C TIC. Cuadernos de Desarrollo Aplicados a las TIC 8, 12–37. doi: 10.17993/3ctic.2019.83.12-37
Ujike, S., Yasuhara, Y., Osaka, K., Sato, M., Catangui, E., Edo, S., et al. (2019). Encounter of pepper-CPGE for the elderly and patients with schizophrenia: an innovative strategy to improve patient's recreation, rehabilitation, and communication. J. Med. Investig. 66, 50–53. doi: 10.2152/jmi.66.50
Urrútia, G., and Bonfill, X. (2010). Declaración PRISMA: Una propuesta para mejorar la publicación de revisiones sistemáticas y metaanálisis. Med. Clin. 135, 507–511. doi: 10.1016/j.medcli.2010.01.015
Van den Heuvel, R., Jansens, R., Littler, B., Huijnen, C., Di Nuovo, A., Bonarini, A., et al. (2022). The potential of robotics for the development and wellbeing of children with disabilities as we see it. Technol. Disabil. 34, 25–33. doi: 10.3233/TAD-210346
Vear, C. (2021). Creative AI and Musicking robots. Front. Rob. AI. 8:631752. doi: 10.3389/frobt.2021.631752
Vlieghe, J. (2022). Sharing Love for a common world on and off screen. A pedagogical and Technocentric account. Journal of new approaches. Educ. Res. 11, 1–14. doi: 10.7821/naer.2022.1.855
Woo, H., LeTendre, G. K., Pham-Shouse, T., and Xiong, Y. (2021). The use of social robots in classrooms: a review of field-based studies. Educ. Res. Rev. 33:100388. doi: 10.1016/j.edurev.2021.100388
Keywords: artificial intelligence, music, educational technology, social robotics, systematic review
Citation: Martinez-Roig R, Cazorla M and Esteve Faubel JM (2023) Social robotics in music education: A systematic review. Front. Educ. 8:1164506. doi: 10.3389/feduc.2023.1164506
Edited by:
Antonio Palacios-Rodríguez, Sevilla University, SpainReviewed by:
Esteban Vázquez-Cano, National University of Distance Education (UNED), SpainFabrizio Manuel Sirignano, Suor Orsola Benincasa University, Italy
Paz Prendes-Espinosa, University of Murcia, Spain
Copyright © 2023 Martinez-Roig, Cazorla and Esteve Faubel. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Rosabel Martinez-Roig, cm9zYWJlbC5tYXJ0aW5lekB1YS5lcw==