 Badr Salman H. Alsoliman
Badr Salman H. Alsoliman
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Educ., 14 July 2022
Sec. Digital Education
Volume 7 - 2022 | https://doi.org/10.3389/feduc.2022.950766
This article is part of the Research TopicEducational Robotics as a Tool to Foster 21st Century SkillsView all 9 articles
Classroom teaching with robotics points to a more engaging learning environment in many respects, particularly in terms of tasks related to problem solving and critical thinking in education. Nevertheless, previous studies have cited many obstacles to using robotics in the classroom. These obstacles include the costs of supplying students with robots, fixing and modifying the robots, and school facilities and infrastructure that negatively influence a teacher’s ability to teach a particular STEM subject or to apply new teaching approaches with robotics; these issues seem to have discouraged some teachers from utilizing robotics in their teaching approaches. Accordingly, this study aims to facilitate teaching with robotics through the use of virtual robotics. The study explores the experience of eighth grade students and their teachers engaging with a virtual platform in five different K–12 schools that have formally incorporated physical robotics into STEM classroom teaching. A qualitative phenomenological approach is utilized to explore the experience, using focus groups with students and interviews with teachers. The focus of this study is on the processes of teaching and learning STEM with robotics via virtual platforms, and the perceived effectiveness and practicability of the virtual platform. The study revealed that the use of virtual classrooms and applications has become acceptable by many educational institutions, influenced to move to online platforms during the COVID-19 pandemic. This has laid the foundation for teachers and students, as the end users and main actors in education, to invest the time and effort in improving STEM and other related skills using virtual robotics. They were motivated by the perceived and acquired benefits that are associated with using virtual robotics in a web-mediated educational process. The main barriers were associated with web-mediated cultural norms and educational regulations/policies related to virtual learning. The main recommendations of the study are for teachers to be innovative, to observe, and to listen carefully to their students, relying on their pedagogical knowledge to use available technology to serve student-teacher objectives.
Robotics has been proven as a successful teaching method for K-12 students by many studies. Other studies have pinpointed the theoretical perspective behind learning with robotics, derived from the pioneering work of Papert (1980) in educational robotics. Papert suggested that the main elements of constructivism and constructionism are fulfilled through the use of robots in education by ensuring that students are engaging in the real life experiences of learning that utilize social interaction (Anwar et al., 2019). The practical use and benefits of robotics in education have also been addressed, with indications that the approach goes beyond achievements in science, technology, engineering, and math (STEM) related outcomes, knowledge, and skills to include more real life applications, such as social interaction and skills. For instance, Kim et al. (2015) indicated a positive effect from teaching with robotics in improving critical thinking skills and problem solving capabilities; improving reasoning and skills related to physics and math (Williams et al., 2007; Ortiz, 2011; Alfieri et al., 2015), higher levels of engagement and improvement in teamwork and interpersonal skills (Lepuschitz et al., 2017); and improvement in social interactions and the application of knowledge (Witherspoon et al., 2016).
While it can be argued that use of robotics in education is successful, based on related literature, but the question is whether the case would be different when applied to virtual robotics in online classes. The use of virtual environments for acquiring real world skills have also been addressed by psychology researchers to gauge the practicality of using recent virtual reality technology developments. For instance, Wright et al. (2021) studied teenage mothers learning about imminent dangers in the household through virtual reality games built on principals of cognitive science. These games proved successful in consolidating learning and eliciting effective reactions in real life. Another experimental study conducted by Schloss et al. (2021) that compared learning in two functional anatomy groups concluded that virtual reality environments are important supportive environments for school education in the future. In conjunction with the aforementioned studies, the practicality and usefulness of virtual robotics in many educational settings was indicated for achieving educational outcomes for K-12 students. These studies support the argument that virtual robotics can achieve most—if not all—educational objectives when compared with real robotics. For instance, the study by González-García et al. (2020) indicated that virtual robotics could provide a successful environment for knowledge application (reinforcement of knowledge) for the majority of students involved in learning kinematics, with improved critical thinking ability and problem-solving skills, which was identified by the Mistretta (2022) study.
Virtual robotics platforms provide a graphic environment that mirror the same procedures that are required in an actual/physical robotic environment. However, in educational settings, and for STEM in particular, the main purpose for using real or virtual robotics is to achieve desired outcomes, improve general learning skills, and construct knowledge and creation (Anwar et al., 2019). Therefore, the question of efficiency rises when considering the use of virtual robotics or real robotics, if directed to the same purpose. Moreover, many studies have indicated that teaching STEM with robotics might be a successful solution for achieving outcomes that are difficult to achieve through conventional classroom methods (Kopcha et al., 2017; Angeli and Valanides, 2019; Shan et al., 2019). Additionally, cost, flexibility, mobility (Alsoliman, 2018; Hammack and Ivey, 2019; Tengler and Sabitzer, 2022), and, more recently, unpredictable global circumstances such as the COVID-19 pandemic, are factors that should be considered when deciding on which STEM teaching methods, facilitated by robotics, should be implemented. Studies have highlighted that virtual robotics can compensate for the lack of physical presence by offering features like mobility, flexibility, and accessibility to all students (Gucwa and Cheng, 2017; Lamb et al., 2020). Therefore, it’s important to explore the validity of virtual robotics as a contemporary and future solution for improved and accessible STEM teaching.
In practice, using virtual robotics often includes teaching entirely online. This takes the learning experience to another level, where it is important to investigate the cyberpsychology effect on student interaction in virtual environments. Understanding this component plays a key role in communication in the teaching environment, which requires collaboration for building and sharing knowledge (Anwar et al., 2019), and how it can affect the use of virtual robotics in teaching STEM experience. Therefore, it is worth delving into theories and research on cyberpsychology that are related to communicating in cyberspace. Many factors are expected when teaching STEM with virtual robotics in virtual classrooms. Learning with robotics in virtual environments can be influenced by the social identity model of deindividuation effects (SIDE), as suggested by Walther (1996). The hyperpersonal model describes online communication as laden with affection and intimacy compared to face-to-face interactions, attributed to the effect of projecting a positive social identity online and the virtual inclination to representing ideal social standards. In conjunction, Jiang et al. (2011) experimental study showed that participants are more likely to disclose detailed personal information in communication cues online, which would play a role in the sharing and construction of knowledge when learning with virtual robotics. Related to the latter factor, two important theories of online behavior are the equalization hypothesis and SIDE, which are conjunctional theories. The resulting behavior could be an effect of both theories, which might eventually influence learning online with virtual robotics. The equalization hypothesis can be explained briefly through a study by Dubrovsky et al. (1991), which revealed that more equalization occurs in an online environment than face-to-face (F2F); in this case, contributions from the perceived lower status/lower power participant are expected to increase. SIDE can be linked to the equalization theory, in that the full or partial anonymity of a participant can play a vital role in the vibrancy and quality of online communication when the state/power of the individual is omitted; in the case of learners, their identity is not known.
Another important factor is educational setting and the regulations of the virtual classroom environment. Pearce and Cronen (1980), in their theory of coordinated management of meaning, suggested that participant interpretations of communication are judged by many social and relationship rules that are classified as constitutive and regulative. The constitutive category conveys the rules that manage the sender’s role in communication, while the regulative category decides what online behavior is acceptable to the targeted online community (i.e., society). These categories are highly influenced by the online atmosphere/settings which in education, could be an important factor that determines whether the constitutive and regulative rules are acceptable or not, depending on the educational settings. Clark and Brennan’s (1991) theory indicated the need for grounding knowledge in any F2F or online communication, which may also point to an important factor in teaching with virtual robotics in virtual classrooms. Here, in the virtual educational setting, the forming of grounded knowledge is easier, faster, and can take many forms. For example, facilitating grounded knowledge by using ready-to-use video, pictures, or emojis online and then building on that knowledge through participant collaboration on an online bounded platform enables repetition and persistence of shred object/knowledge, like in most virtual classrooms.
Finally, some studies have described the online environment as a medium for enjoyment and engagement, with high immersion accompanied by the loss of time awareness. This phenomenon has been ascribed to the flow theory when a highly rewarding environment is involved (Webster et al., 1993; Voiskounsky, 2008). Harasim (2012) identified the internet—one example of online virtual platforms of communication—as another major and essential communication phenomenon encompassing the spoken, written, read, and heard elements that exist in actual reality, such as F2F environments. Accordingly, it can be argued that Hart’s (2014) suggestion of web-mediated learning exceeds conventional F2F learning in its ability to provide instant and updated information and to offer communication, storing, and sorting tools. She offers different and optimized levels of formal learning for individuals and groups that are complex and not easy to predict, which can shape different futures for humanity.
With all of this in mind, this study aims to explore the reality of teaching and learning STEM through the use of virtual robotics in virtual classrooms from the perspective of the participants, taking into account tacit and detailed information from the users. The results provide a real and detailed account of how it feels to teach and learn with robotics in a virtual environment, given that the previously presented studies do indicate that physical robotics and virtual robotics could have the same level of effectiveness. However, given that the barriers to teaching and learning with physical robots, as suggested by the earlier studies, do not exist with virtual robotics, being in a virtual environment could influence teaching practices either positively or negatively. Accordingly, exploring the recent experience of teaching and learning with virtual robotics in an entirely virtual educational environment could provide a better understanding of the validity and reality of the practice, and whether it could be a beneficial and more efficient teaching method when it comes to achieving the same results with physical robots.
This study’s qualitative phenomenological approach was selected by the desire to explore and understand the behaviors, emotions, levels of satisfaction, and interactions of the subjects/participants based on their shared objective of improving STEM-related skills and knowledge virtually with robotics. This was an approach that was rarely practiced before the start of the COVID-19 pandemic and the mandatory closing of F2F schools, and these responses of the participants are part of the equation of external and educational settings that affected their decisions unintentionally/subconsciously, in order to acceptably/agreeably participate in the experience. Thus, influenced by social constructivism’s worldview (Moustakas, 1994), the shared objective of teaching and learning virtually with virtual robotics, along with its inseparable/associated educational settings, affects how participants subjectively experience the teaching individually and collectively, which is part and parcel of understanding the approach.
Many aspects of the data collection methods and related procedures were conducted in accordance with Creswell and Poth (2016), including the selection of online interviews and participant sampling. The study focused on collecting transcript data from students and teachers who experienced both virtual and physical robotics as a tool for teaching and learning STEM subjects. To meet the study requirement of having experience with both physical and virtual teaching and learning STEM with robotics for comparison, use of the virtual robotics toolkit (VRT),1 a well-known educational robot with virtual and physical robots and a universal platform used by many school teachers in the country, was one of the main criteria for selecting participants, given its virtual ability to mirror graphically and functionally most aspects of the physical educational robots (Berland and Wilensky, 2015).
After completing the ethical considerations approval process and gaining access to participants, a purposive criterion sampling strategy was employed to select the study participants, which resulted in a sample of five teachers and 25 students from five different eighth grade all-boys schools teaching STEM subjects with real robots in the classroom and virtual robotics in virtual classrooms outside of school. The data was collected from one-on-one interviews with teachers and focus groups of five students in each group, from each of the five schools. The interviews were conducted online using Zoom2 with ten-phase procedures adopted from the procedures proposed by Creswell and Poth (2016) to prepare and conduct interviews (see Figure 1). The interviews focused on investigating and exploring the knowledge and skills related to STEM, and identifying emergent themes that are pertinent to the main experience. Therefore, all the participants were selected on the basis of their involvement during the study period, with regard to curricula that aim to ensure the acquisition of STEM knowledge and skills. Consequently, the study results and findings detailed in subsequent sections describe the activity and experience of the participants as they see it. They describe the situation without intervention by the researcher involving the use of additional tools or measurements to assess the described outcomes in terms of the participants, other than the main data collection tool (interviews) and the qualitative techniques aimed at triangulating the collected evidence and the related thematic analysis procedures.
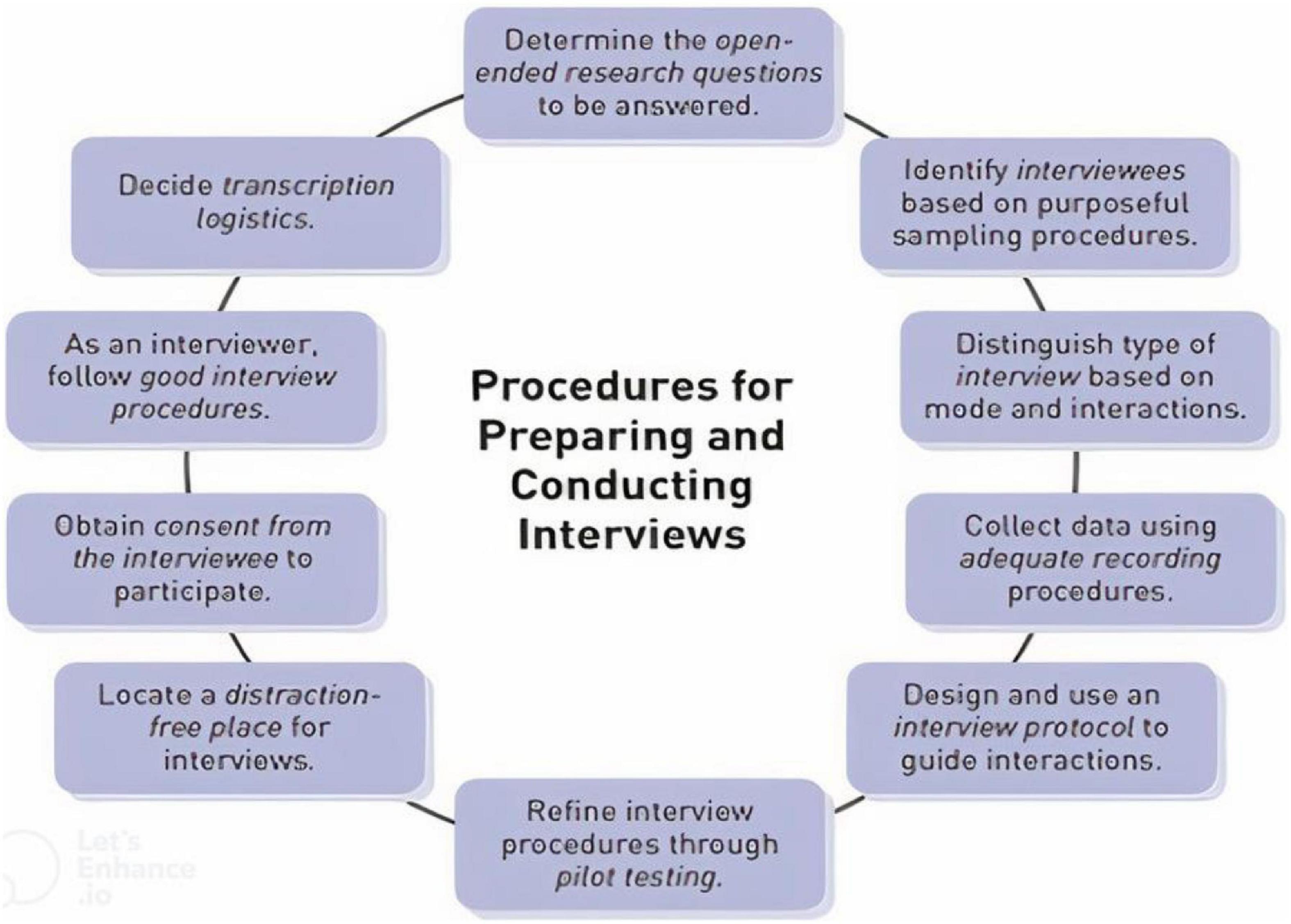
Figure 1. Procedures for preparing and conducting interviews, adopted from Creswell and Poth (2016, p. 233).
Qualitative thematic analysis was used to analyze and interpret the collected interview data; the data analysis spiral procedures suggested by Creswell (2013) were used (see Figure 2). The analysis went through four interconnected spiral phases that were revisited when needed for more saturation to support the interpretations. Significant statements were coded (horizonalization) and later combined into broader themes (clusters of meaning) to provide a textural description (the participants’ experience) and structural description (the experience influenced by situational settings) that enabled the study to describe the essence of the phenomena. Moustakas (1994) served as a basis for discovering the experience of teachers and students using virtual robotics as a tool for teaching and learning STEM subjects in an entirely virtual environment and for considering their role in an bounded educational system.
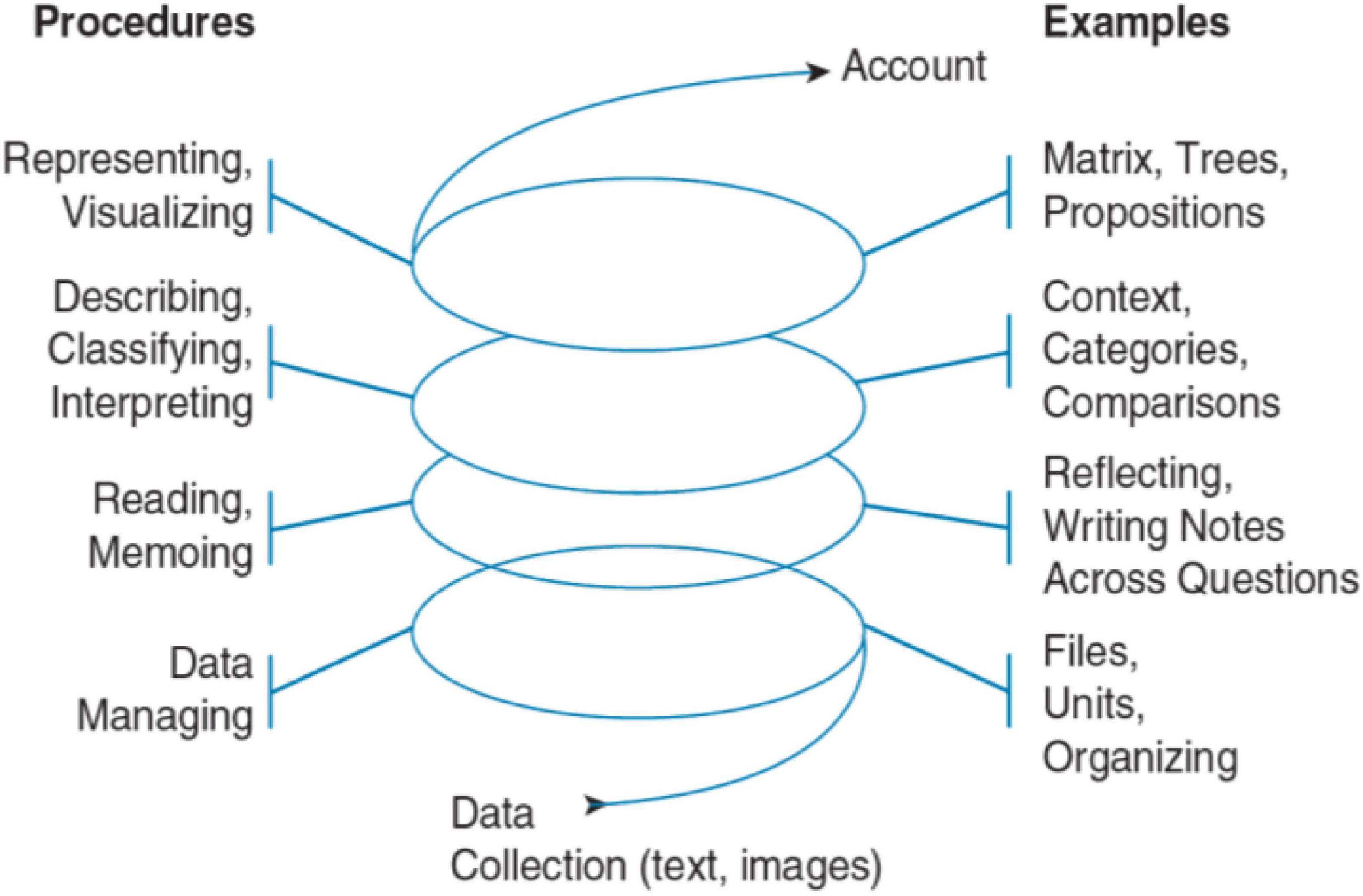
Figure 2. Data analysis spiral procedures adopted from Creswell (2013, p. 183).
To ensure the trustworthiness of the phenomenological study, Moustakas’s (1994) recommendation that the research results and interpretations not be cluttered with the researcher experience, in order to reflect the fresh, uninterrupted experience of others who experienced the phenomena, was applied. As an associate professor with years of experience teaching computer science to tenth and eleventh grade students from 2003 to 2008, and who has supervised many researchers in robotics and virtual reality, I chose for this study a different grade from what I taught in my early years as a teacher to bracket my experience with virtual reality and robotics as a means of educational progress in the twenty-first century and to provide a fresh account from the participants. Additional strategies were applied to ensure the trustworthiness of the study. First, my long engagement with the field of virtual reality and virtual classes, cyberpsychology (as a founder of the first diploma in cyberpsychology in the Arab world), and my immersion in the field of robotics as a teaching method made me aware of the culture, background, and information that is exchanged in the virtual environment, as well as of the robotics terminology that supports the authenticity of the results from forms of distortion or misunderstanding of the information (Lincoln and Guba, 1985). Second, the triangulation of evidence was employed, whether by comparing data from different sources (teachers and students), codes, or themes during interpretation (Creswell, 2013). Third, debriefing sessions, suggested by Lincoln and Guba (1985), were conducted three times, during which two of my professor colleagues shared their thoughts and discussed my interpretations, collection methods, and descriptions, which positively influenced my bracketing practice and the accuracy of my descriptions. These efforts were accompanied with external auditions of the findings and interpretations against the collected data, which was of great help establishing more conformability to the study findings. Last, and most important, member checking combined with a detailed description of the interviews and the surroundings were top priorities to further ensure the credibility of the study findings (Lincoln and Guba, 1985; Stake, 1995). I took my initial transcripts, descriptions, and ideas back to the teachers (individually) and students (in groups)—approximately 30 min after each interview—and Zoom polls were used sparingly. There were only four occasions when I needed to reconfirm my thoughts and descriptions of the group narrative.
Transcripts from ten interviews were distilled into 126 significant statements and the thematic analysis procedure produced three main themes, constructed meaningfully from thirteen codes (see Figure 3). The experience of virtually teaching and learning STEM with robotics was captured in the following three main themes/sections, and the essence of the phenomena was described in the fourth section of the results.
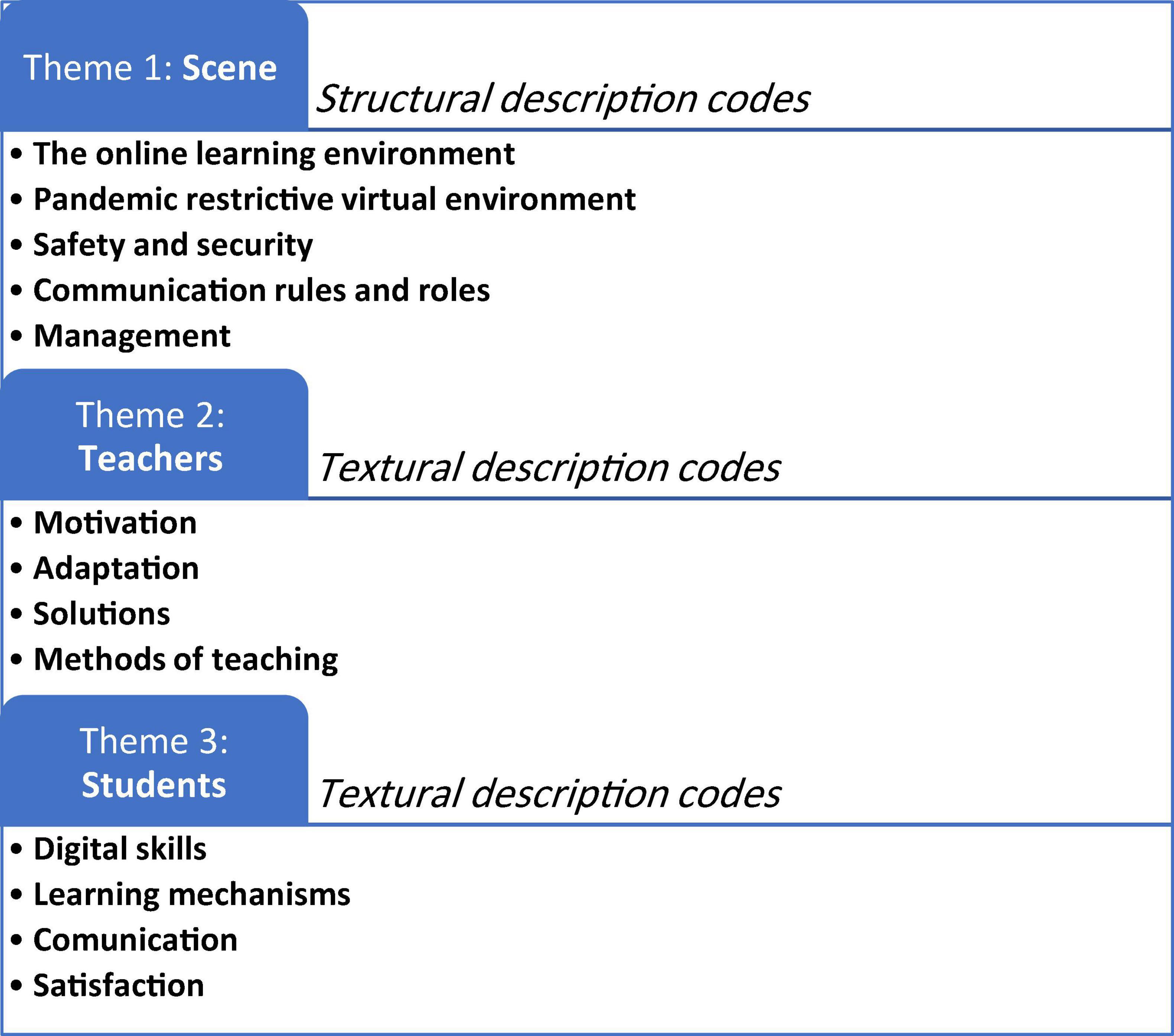
Figure 3. The main themes and associated codes.
Within an open cyberspace and with multiple network connections, where a variety of screens, shapes, and sizes served as gateways to virtual sensory experience, entry for a limited group of students was available. Students from either the same school or the same class were allowed to join this confined, limited, and synchronous space. Although unlimited possibilities on the internet were available, the desire for maximum safety and security, as well as school regulations, resulted in the teachers and students using Microsoft Teams (MT) as synchronous virtual class space. It is important to point out that as a part of the schools’ mandatory policies, MT was the online virtual classroom platform authorized by the Saudi Ministry of Education, generating a unique username and password for every student in the Kingdom of Saudi Arabia. While this approach comes with many advantageous security features however, it is at the expense of other applications and platforms that can offer more opportunities on the internet.
During early June 2021, when this study took place, there was a national lockdown due to the COVID-19 pandemic that required fully virtual classroom instruction for all grades in all schools. It was an exceptional time for eight grade students; Saudi Arabia has three mandatory school levels: primary school from first to sixth grade; elementary school from seventh to ninth grade; and secondary school from tenth to twelfth grade. The newest elementary school students in this study were not able to see their peers in person at the start of the school year and in this case, not many of the students knew each other from their previous primary school or as neighbors (students who are neighbors are usually enrolled in the same district school). One student sadly said in response to a question I asked about what was it like to see each other online:
“I wish I could do like [another student name] ………… he was able to put his picture on the screen in classes … I know what he looks like now; I think I know him from our 5B class. I wish that we had been able to see each other before school. Now it feels like social media—not real.”
As can be seen from the previous quote, in these virtual classrooms, F2F communication cues are dependent on having cameras. But even with the advantages of cameras, the body language and facial expressions that usually accompany personal interactions were missing due to local culturally accepted norms of not showing one’s face or home surroundings to strangers; this added an additional level of uniqueness to this learning space. However, participants in these kinds of environments tend to compensate by communicating with emojis or tone if voiced, but usually written in the form of duplicated letters, gestures/descriptions, or stickers. When asked about what communication tools the class used most, one teacher commented:
“Oh, children [chuckles]. If you turn on a camera, you will see wonders. Usually, I disable it. You can’t imagine what they do with their faces, sounds, and other stuff. Between me and you, I don’t usually understand [laughs] but I think they do, and they laugh and respond accordingly. Our generation is not like theirs at all … unexpectedly, they are happy, even when I leave the class to them with only chat activated.”
MT was the only official virtual class platform that provided the means for gathering students who were interested in joining the virtual robotic platform for extra STEM teaching time volunteered by some teachers who found this method effective and enjoyable for everyone involved. When asked how they were able to move their teaching practice to a virtual platform, one teacher stated:
“Before, I asked students to join by distributing brochures during breaks and activity times, usually fourth or seventh periods, and whenever I have enough students I begin. Now, during any curriculum where what I teach is related to STEM, I begin during the first weeks of my online class by sharing the brochures on the screen and asking students to raise their hand if they are willing to take part and I send them email later, or I send invitations during class with the time for our virtual robotics session.”
One great feature enjoyed by participants was the similarity between the physical robots that were previously used by the majority of participants (not all students had previous experience with physical robots) and the virtual robot application that mirrored the physical version, including the procedure of coding, adding sensors and accessories, and moving. The mirroring was so extensive that the virtual robot used the same physical parts, including a piece called the brick to code and control the physical robot and an extra graphic brick. Log in experience was advantageous as the VRT application was able to use the same students’ Microsoft approved account seamlessly, as provided by the schools, to access the online learning platform. Additional features were developed to match the physical surroundings of a real robot of the same name (LEGO Mindstorms), however a drawback to the virtual environment was the limitations of the virtual playgrounds and the inability to draw/create your own virtual environment/playground unlike real robots, which can be placed anywhere in the physical environment. As shared by one teacher about teaching robotics using the virtual robotics platform:
“I don’t find any problems with teaching with virtual robotics, as it looks the same, with more extras. The only thing I discussed with the other teachers is using the robots in a way that mimics the real environment by drawing some new playgrounds or using pictures from reality, which restricted us to a bunch of relatively limited playgrounds.”
The key access point for both students and teachers to the virtual robotics teaching methods for STEM-related subjects was via online synchronously scheduled sessions offered by the teacher (approved by the school). Approved sessions were initiated by the teachers and enlisted approved students join the sessions, with had the ability to share screens and chat in text and voice (including pictures or videos of a previously recorded VRT experience), moderated by the teachers. Although the sessions were not consistently scheduled, they required parental approval in the form of a signed letter sent by email to the teacher/school. Although more students joined virtually compared to the physical F2F robotics sessions, the sessions were limited to five to ten students. Smaller groups are considered beneficial when teaching STEM with robotics, given the limited timeframe and limited availability of teachers who can help and encourage the approach. This issue was shared evocatively by one teacher, when asked about the virtual environment management:
“Thank god [sighs] the student numbers were small but more than expected in my F2F robotics classes. Teaching with robotics is a time consuming mission, given that some students don’t know the basics of VRT and MS Teams, but they are doing well because I was able to give them more time to learn. I’m the only teacher in the school that volunteered to use virtual robotics because my students asked me in my first virtual class, “How can we continue with our robots?””
Other synchronous online access points were not recommended for safety and security reasons but, nevertheless, were used by students initiating VRT accounts and using the VRT challenges website outside the approved sessions platform. This allowed two or more participants to sign in and enroll in the challenges offered on the VRT website or other similar websites. In response to a question about feeling fully engaged in learning, one student replied:
“The challenges outside school sessions are so fun. I joined with [another student name] and challenged an older student from America. he didn’t know we used [application name that offers voice, video, and screen sharing] to use our knowledge together and we defeated him using a trick of physics repetition [laughs with joy]. He didn’t study well [giggles].”
For teachers, complete virtual teaching is a new experience and a meaningful opportunity for learning. Although teaching fully through the online platform was mandatory, it took 2–3 weeks for most teachers to acclimate to the MT interface. Some features of the platform were intuitive, while others were not initially recognized by teachers as a management tool for a class of more than 30 students. Notwithstanding the need to deal with two interfaces—the VRT interface and the MT virtual robotics interface—it seems that teachers were able to familiarize themselves with the new-to-them platforms to teach STEM with robotics, prompted by their students urging and expectations for the outcomes they had in previous years. It’s worth mentioning that prior to the teacher interviews, I assumed that all of the participating teachers were familiar with MS Teams and VRT online platforms, in order to be able to use a teaching methodology that requires this type of knowledge. Unexpectedly, I listened to accounts of teacher having had no prior experience with the aforementioned online platforms. One account was really a game changer for me, as this teacher shifted my attention to the motivation behind the huge effort of time teachers spent adopting virtual robotics in STEM teaching:
“It was hard at the beginning to use teams. I’m no computer science person (chuckles), I needed to put myself in a room for 2 weeks, working only on learning about teams and VRT from YouTube. I needed to be better than the students to teach them. I didn’t know about VRT till I heard about it from one of my students. I’m not sure, but students working with robotics are the best. One of them has received many prizes and put the school’s name on the national list of top students in the country.”
This was contrary to my experience teaching with robotics; my personal experience is shared in this bracketed aside: [Thirteen years ago, I used the old physical version of robotics and more recently, I taught and supervised teachers of K-12 students with robotics. In those days, I thought it was hard enough spending extra time teaching my students with robotics; but, then I figured out that it actually took more time and effort to prepare the room to use the available robots adequately, notwithstanding making sure that the students are prepared and willing to participate]. I was proven wrong by all of the interviewees, due to changes in the pace of student and teacher learning, accompanied by newly available technology and the dissemination of knowledge in cyberspace.
Another important factor—mentioned previously—was the recent change in the latest desired outcomes relating to the national curriculum. This provides significant motivation for teachers who were willing to adopt the approach of teaching involving robotics, and who were able to apply the available assessment methods provided by the courses associated with STEM in such a way as to evaluate their experience and determine their motivation when it came to using virtual robotics in light of the students’ achievements in terms of the desired outcomes.
One response from a teacher to my question about the reasons for not abandoning the use of robotics for teaching STEM, given the unavailability of physical robotics during the unusual COVID-19 pandemic circumstances, was spectacular:
“If you see your students collaborating with each other as a team to solve a problem that requires physics + geometric + math + engineering + computer input and output + organization and management, and writing symbols, phrases, enthusiasm in their voice; I don’t think you can resist learning to teach that approach. All in YouTube, I learn and share on virtual classes. my students are happy, straight “A” students, and I think I am a programmer in their minds [laughs]. I am joking [laughs]. twenty-first century skills is one vital target of the 2030 Saudi vision and none of the ministry supervisors can argue, actually they encourage it, as it complies with their outcomes.”
A conversation comparing the previous experience of teachers with physical robotics and their current virtual experience opened a fruitful discussion revealing that in terms of cost, the virtual robotics platform is minimal compared to installing and bringing a physical robot into a classroom or a lab. Students are required to install the application once, with teachers paying for the VRT online platform, a conventional practice even though the platform is free for a trial period, since teachers usually use their account to illustrate the process of coding. Teachers also give students a chance to take lead the class by either accessing the teacher’s account or by leading the teacher through the coding procedures to solve problems. However, many students have their own accounts and often share those accounts with their peers to solve problems or conduct challenges provided by the teacher, paving the way for more students to join the process of learning with robotics (see next section). A vital factor that was stressed by all teachers was that VRT graphically mirrors LEGO Mindstorm physical robots. This means that teachers and students with previous experience with the physical version of this robot were able to easily create their own robot with the available 3D graphic parts, save it, and initiate their project with no concerns about space preparation, recollection of components, missing pieces, physical damages, specified time play/trials, or specified physical place for students. Moreover, the screen sharing tool on MT was seen as a valuable tool, offering a meaningful way of sharing screen views between participants, whether teacher or student. This feature allowed teachers to instruct a student by sharing their screen, or vice versa, depending on the teaching method. A combination of screen sharing, drawing on the screen, chat, and voice initiated a vivid communication channel between the virtual online classroom and the VRT, given that they are connected by the screen sharing feature. The ability to record the sessions was perceived as another feature that allowed more students who were not initially interested due to concerns about complexity to join the sessions and saved time for teachers, which was not the case with the physical classroom/robots. Concerns were mainly centered around internet connection quality and VRT account availability for each student, which were not perceived as great disappointments to the group that was interviewed, given that these factors were suggested as recommendations. One teacher responded enthusiastically to the question about his favorite part of physical or virtual robots by saying, “Given the cost and ease, I don’t think I will use physical robots again; now, I’m an expert in virtual robots.” However, recommendations revealed some important aspects to consider in an educational environment such as the negative impact of losing connection, synchronous online communications in particular, which could lead to students’ feelings of isolation. Another aspect is the cost of the VRT subscription which was solved cooperatively by students (see students’ quotes in the next section). Nevertheless, the use of the VRT application for a long period of time is expected to reveal issues of cost and other related factors that in themselves need to be considered when using subscription-based applications like VRT in STEM teaching.
As a new, mandatory learning environment but not a new space, students learning in a virtual classroom was a great advantage for them, where they could use their native digital skills in learning. Unsurprisingly, the merging of two virtual worlds that requires multi-tasking between two different platforms was not new for the students, but more for their teachers. All of the interviewed students had some basis for relating to the virtual classroom experience, from online chatting with text to voice, or even video, in many synchronous online multi-user applications and gaming platforms. In general, students found it easier and enjoyable to communicate and learn with virtual robotics in virtual classes than their teachers. In most cases, synchronous video communication and integration with other applications/services were preferred by students, although not permitted by teachers, to facilitate learning with virtual robotics in virtual classrooms. In group discussions, many of these points were raised and innocently confirmed by students cheering and encouraging each other. A clear student statement was:
“I love Teams. It’s easy and I can use it with no instruction at all. The teacher doesn’t allow me to share video or integrate with [mentions an application name] to work much better with low internet quality—maybe he doesn’t know how to use it! All students know, but he refuses.”
Students gained more confidence as the classes with virtual robotics became a regular learning activity and more students joined the activity. Compared to learning during regular F2F classes with physical robotics, the associated costs have not become a requirement and the feeling of obligation to bear that cost—although not a requirement previously—has diminished. Enjoyment is a distinguished factor in virtual classroom learning with virtual robots. The eighth grade students enjoyed the challenge, and sometimes the anonymity, provided by the VRT platform user accounts, spending more time learning with robotics individually, outside the designated sessions, in order to best their opponents in challenges. This required students to initiate their own accounts in the VRT and to use other online applications for participation and practice online, whether individually or in groups. It is worth mentioning that in many cases during the focus groups, there were accounts of students going back to the books to remember equations, especially those related to physics and math, as well as practicing many tricks that were pertinent to the robots in hand outside of the virtual robotics times. Moreover, the introduction of new people (students or others) with the same interest, more real-life challenges for socializing with others online, learning new techniques related to physics and math, the creation and management of teams, and learning through new applications are all value added to the use of virtual robotics. Here are some examples of statements that reflect most, if not all, student views from the study focus groups:
“I don’t have to ask other students to come with me so we can share … I have an account to practice and I share with other students. You can use for free 15 days and others can open a new account and share. I have more friends in VRT, and I can do more with them than my classmates … they think I am a genius, and I like them…”
“I can win any challenge, but I need to know which. I memorize all the rules or use the schoolbook if necessary. I created a group in [application name] and we do everything together … not all from my school but like me, not too old. we talk about school and robotics and other stuff … we ask others to join but not the old ones, some speak funny, but they are good at robotics [laughs].”
Although the prevalent theme among the student participants was positive, it wasn’t unanimously agreed upon. There were some views—although these were few and diminished quickly under the influence of group pressure—which are worth considering. Two students have mentioned the free trial period of the VRT application and their inability to connect adequately with the online group synchronously, together with their view of the application graphics which could greatly affect the learning process. One of the students said during a focus group but later didn’t continue with the criticism—pressured by his peers who provided many reasons and solutions to the connection and graphic problems:
“I think It will stop working after 15 days … maybe my connection was not good as graphics become so bad and I lost connection with the MS teams.”
In describing a phenomena, it is important to illustrate how that phenomena is seen by the actual people who experience it (structural description), as in the results of the scene section and the way it is perceived and experienced (textural description), to be able to interpret the real essence of the phenomena. However, when context is considered vital in phenomenology, it is important to consider the question of how far we should go to conjure the essence of the phenomena. Thus, the experience described in this paper is one that tells the story of many screenshots of lived experience in cyberspace, triangulated by comparing and contrasting the accounts of different individuals from different ages, views, power hierarchies, and purposes, but unified by the shared objective of improving STEM-related skills and knowledge. Teaching and learning in a virtual environment needs skills that may not be required in F2F scenarios. Moved by the uniqueness of the COVID-19 pandemic situation, twenty-first century curriculum requirements, policies, and outcomes, a technology equipped generation, and the struggle between the motivation of teachers to become suited for the twenty-first century and students who are willing to delve into familiar terrain, was necessary to develop the means or improving teaching with robotics. Virtual robotics was a solution that was new but not unusual, predicted to bridge the gap between reality and virtuality. As a relatively new practice, teachers sought an experience with negligible differences to be able to perform adequately in an environment that was not vastly dissimilar; a virtuality that mirrors reality was preferable, to allow for an unchallenged transition between two worlds—reality and virtuality. This was mostly for the teachers, as the change in pedagogy that complies with virtuality—an area of robotics that is not familiar to them—requires greater effort from teachers compared to their students, at least at the beginning of the experience. An experience loaded with benefits that not only pertain to the shared objective of acquiring STEM skills knowledge, but goes beyond to the more social and psychological aspects of the individuals living the experience, has suppressed many factors that may incentivize teachers and encouraged students to live meta-experience outside the classroom. This experience, nonetheless, was negatively influenced by some policies erring on the side of caution, choosing the comfort zone when it comes to issues of safety, security, and the provision of fruitful virtual robotics experiences in education.
In this study, where participants were limited to virtual online experiences, the impact of the environment was prevalent in their perceptions of the experience. Aspects of virtual communication cues, teaching and learning, and cyberpsychology were in the forefront. Although influenced by the restriction of the educational process due to the COVID-19 pandemic, to online environment has been seen by participants as a way to focus on their shared objectives of improving STEM-related skills and knowledge in a mandatory virtual environment. In doing so, the focus of participants shifted toward achieving their main objectives by utilizing available skills, knowledge, and settings. Students equipped with digital nativity were able take advantage of the virtual world in many aspects, which can be explained and confirmed by numerous theories. Students were more focused on creating meaningful interactions by reflecting more desirable virtual personalities, which enabled them to make more friends with the same interests on the same or other platforms. This reflects the SIDE model, as suggested by Walther (1996) Regarding the hyperpersonal model, the Dubrovsky et al. (1991) study revealed that more equalization occurs in an online environment than F2F; therefore more contributions from the perceived lower status/lower power participant are expected to increase. Students were able to lead the learning process in many cases—where some interactions and communication were not recommended by teachers—learning at their own pace by taking extra or less time outside the official virtual robotics sessions, and not feeling obliged to emulate teachers or other students to contribute. This also required a change in the rules (constitutive and regulative) and roles, as explained by Pearce and Cronen (1980) in their theory of coordinated management of meaning. Concerning teachers, this was an opportunity to practice new knowledge related to their interests; all of the teachers were volunteering to teach STEM using virtual robotics, and their willingness to contribute was influenced by student needs and the simplicity of the virtual platform, as it exactly matched the familiar physical robotics application that conforms with Hong et al. (2021) findings. It is important to point out the benefits associated with using virtual robotics in a web-mediated learning process that is cited by the participants, including: achieving the desired outcomes related to STEM skills and knowledge; mobility and fixability; more student accessibility; lower costs; reinforcing knowledge through trial and error with no consequences; critical thinking; promoting interpersonal skills; improving team work; and improving problem solving and reasoning skills. These outcomes are also associated with learning with physical robotics, as established by many studies (Witherspoon et al., 2016; Anwar et al., 2019; González-García et al., 2020; Lamb et al., 2020; Wright et al., 2021; Mistretta, 2022; Tengler and Sabitzer, 2022). The main barriers that were noted were associated with web-mediated cultural norms, lack of interest, and regulations/policies promoting positive practices related to virtual learning with robotics. This included norms related to camera use during online classes, and policies that incentivize the practice of virtual education and regulate it in a way that allows for safe and secure interactions between students and teachers nationwide.
The use of virtual classrooms and virtual applications has become acceptable by many educational institutions and schools, which leads educators to consider shedding light on adages such as “from distress to deliverance” and “necessity is the mother of invention.” The mandatory transition to online platforms for education has laid the foundation for ideas and investments, not by educational institutions but by the core participants and end users who can change the paradigm of education and move to the connectivism theory or digital age education, as proposed by Siemens (2004). It’s time for teachers to be innovative, to observe, and to listen carefully to their students, and use their pedagogical knowledge to transform available technology to serve student-teacher objectives. This is expected to pave the way for policy-makers and institutions to promote and regulate the end-user experience, if seen as efficient compared to other methods of teaching and forms of delivery. Finally, it’s important to highlight the lack of empirical studies exploring and testing the outcomes of virtual robotics on STEM or its impacts on students’ future interests, satisfaction, and career paths. Studies involving the quantitative measurement of empirical effectiveness of using virtual robotics to improve STEM-related skills and knowledge is yet to be seen in the field. Quasi-Experimental studies between groups or within groups that compare the impact of using virtual robotics, physical robotics or conventional teaching methods of STEM are important. In addition, studying and surveying the satisfaction, aptitude and acceptability of applying virtual robotics among different representative samples, would also be of great significance.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
The studies involving human participants were reviewed and approved by the College of Education. Written informed consent to participate in this study was provided by the participants or their legal guardian/next of kin.
BA contributed to the manuscript preparation and procedures of writing, revision, and approved the submitted version.
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Alfieri, L., Higashi, R., Shoop, R., and Schunn, C. D. (2015). Case studies of a robot-based game to shape interests and hone proportional reasoning skills. Int. J. STEM Educ. 2, 1–13. doi: 10.1186/s40594-015-0017-9
Alsoliman, B. S. H. (2018). The utilization of educational robotics in saudi schools: potentials and barriers from the perspective of saudi teachers. Int. Educ. Stud. 11, 105–111. doi: 10.5539/ies.v11n10p105
Angeli, C., and Valanides, N. (2019). Developing young children’s computational thinking with educational robotics: an interaction effect between gender and scaffolding strategy. Comput. Hum. Behav. 105:105954. doi: 10.1016/j.chb.2019.03.018
Anwar, S., Bascou, N. A., Menekse, M., and Kardgar, A. (2019). A systematic review of studies on educational robotics. J. Pre-College Eng. Educ. Res. 9:2. doi: 10.7771/2157-9288.1223
Berland, M., and Wilensky, U. (2015). Comparing virtual and physical robotics environments for supporting complex systems and computational thinking. J. Sci. Educ. Technol. 24, 628–647. doi: 10.1007/s10956-015-9552-x
Clark, H. H., and Brennan, S. A. (1991). “Grounding in communication,” in Perspectives on Socially Shared Cognition, eds L. B. Resnick, J. M. Levine, and S. D. Teasley (Washington, DC: APA Books), 127–149. doi: 10.1037/10096-006
Creswell, J. W. (2013). Qualitative Inquiry and Research Design: Choosing among Five Approaches, 3rd Edn. Los Angeles, CA: Sage Publication.
Creswell, J. W., and Poth, C. N. (2016). Qualitative Inquiry and Research Design: Choosing among Five Approaches. Los Angeles, CA: Sage publications.
Dubrovsky, V. J., Kiesler, S., and Sethna, B. N. (1991). The equalization phenomenon: status effects in computer mediated and face-to-face decision-making groups. Hum. Comput. Interact. 6, 119–146. doi: 10.1207/s15327051hci0602_2
González-García, S., Rodríguez-Arce, J., Loreto-Gómez, G., and Montaño-Serrano, V. M. (2020). Teaching forward kinematics in a robotics course using simulations: transfer to a real-world context using LEGO mindstorms™. Int. J. Interact. Design Manufact. 14, 773–787. doi: 10.1007/s12008-020-00670-z
Gucwa, K. J., and Cheng, H. H. (2017). “Making robot challenges with virtual robots,” in Proceedings of the 2017 ACM SIGCSE Technical Symposium on Computer Science Education, (New York, NY: Association for Computing Machinery), 273–277. doi: 10.1145/3017680.3017700
Hammack, R., and Ivey, T. (2019). Elementary teachers’ perceptions of K-5 engineering education and perceived barriers to implementation. J. Eng. Educ. 108, 503–522. doi: 10.1002/jee.20289
Harasim, L. (2012). Learning Theories and Online Technologies. London: Routledge. doi: 10.4324/9780203846933
Hart, J. (2014). The Web is 25 Years Old Today – so How has it Changed the Way we Learn?. Available online at: www.c4lpt.co.uk/blog/2014/03/12/theweb-is-25-years-old-today/ (accessed September 27, 2014).
Hong, X., Zhang, M., and Liu, Q. (2021). Preschool teachers’ technology acceptance During the COVID-19: an adapted technology acceptance model. Front. Psychol. 12:691492. doi: 10.3389/fpsyg.2021.691492
Jiang, L. C., Bazarova, N. N., and Hancock, J. T. (2011). The disclosure intimacy link in Computer mediated communication: an attributional extension of the hyperpersonal model. Hum. Commun. Res. 37, 58–77. doi: 10.1111/j.1468-2958.2010.01393.x
Kim, C., Kim, D., Yuan, J., Hill, R. B., Doshi, P., and Thai, C. N. (2015). Robotics to promote elementary education pre-service teachers’ STEM engagement, learning, and teaching. Comput. Educ. 91, 14–31. doi: 10.1016/j.compedu.2015.08.005
Kopcha, T., Mcgregor, J., Shin, S., Qian, Y., Choi, J., Hill, R., et al. (2017). Developing an integrative stem curriculum for robotics education through educational design research. J. Formative Design Learn. 1, 31–44. doi: 10.1007/s41686-017-0005-1
Lamb, R., Lin, J., and Firestone, J. B. (2020). Virtual reality laboratories: a way forward for schools? EURASIA J. Math. Sci. Technol. Educ. 16:em1856. doi: 10.29333/ejmste/8206
Lepuschitz, W., Merdan, M., Koppensteiner, G., Balogh, R., and Obdržálek, D. (Eds). (2017). Robotics in Education: Latest Results and Developments, Vol. 630. Berlin: Springer. doi: 10.1007/978-3-319-62875-2
Lincoln, Y. S., and Guba, E. G. (1985). Naturalistic Inquiry. Thousand Oaks, CA: Sage. doi: 10.1016/0147-1767(85)90062-8
Mistretta, S. (2022). “Virtual robotics in hybrid teaching and learning,” in New Updates in E-Learning, ed. E. Babulak (London: IntechOpen), doi: 10.5772/intechopen.102038
Moustakas, C. (1994). Phenomenological Research Methods. Thousand Oaks, CA: Sage. doi: 10.4135/9781412995658
Ortiz, A. M. (2011). “Fifth grade students’ understanding of ratio and proportion in an engineering robotics program,” in Proceedings of the 2011 ASEE Annual Conference & Exposition, Vancouver, BC.
Papert, S. (1980). Mindstorms: Children, Computers, and Powerful Ideas. New York, NY: Basic Books, Inc.
Pearce, W. B., and Cronen, V. E. (1980). Communication, Action and Meaning: The Creation of Social Realities. Westport, CT: Praeger.
Schloss, K. B., Schoenlein, M. A., Tredinnick, R., Smith, S., Miller, N., Racey, C., et al. (2021). The UW virtual brain project: an immersive approach to teaching functional neuroanatomy. Transl. Issues Psychol. Sci. 7, 299–316. doi: 10.1037/tps0000281
Shan, J. H., Gong, L. L., Li, Y., and Yan, H. B. (2019). The impact of educational robots on student learning outcomes: a meta analysis based on 49 experimental or quasiexperimental research papers. China Educ. Technol. 40, 76–83.
Siemens, G. (2004). Connectivism: a learning theory for the digital age. Int. J. Instruct. Technol. Distance Learn. 2, 3–10.
Tengler, K., and Sabitzer, B. (2022). Examining Teachers’ intention to integrate robotics-based storytelling activities in primary schools. Int. J. Interactive Mobile Technol. 16, 221–240. doi: 10.3991/ijim.v16i06.28905
Voiskounsky, A. (2008). “Flow experience in cyberspace: current studies and perspectives,” in Psychological Aspects of Cyberspace: Theory, Research, Applications, ed. A. Barak (New York, NY: Cambridge University Press), 70–101. doi: 10.1017/CBO9780511813740.005
Walther, J. B. (1996). Computer mediated communication: impersonal, interpersonal and hyperpersonal interaction. Commun. Res. 23, 3–43. doi: 10.1177/009365096023001001
Webster, J., Trevino, L. K., and Ryan, L. (1993). The dimensionality and correlates of flow in human-computer interactions. Comput. Hum. Behav. 9, 411–426. doi: 10.1016/0747-5632(93)90032-N
Williams, D. C., Ma, Y., Prejean, L., Ford, M. J., and Lai, G. (2007). Acquisition of physics content knowledge and scientific inquiry skills in a robotics summer camp. J. Res. Technol. Educ. 40, 201–216. doi: 10.1080/15391523.2007.10782505
Witherspoon, E. B., Schunn, C. D., Higashi, R. M., and Baehr, E. C. (2016). Gender, interest, and prior experience shape opportunities to learn programming in robotics competitions. Int. J. STEM Educ. 3, 1–12. doi: 10.1186/s40594-016-0052-1
Keywords: robotics, virtual classroom, STEM, virtual robot, teaching methods
Citation: Alsoliman BSH (2022) Virtual robotics in education: The experience of eighth grade students in STEM. Front. Educ. 7:950766. doi: 10.3389/feduc.2022.950766
Received: 23 May 2022; Accepted: 27 June 2022;
Published: 14 July 2022.
Edited by:
Lucio Negrini, University of Applied Sciences and Arts of Southern Switzerland (SUPSI), SwitzerlandReviewed by:
Masiar Babazadeh, University of Applied Sciences and Arts of Southern Switzerland (SUPSI), SwitzerlandCopyright © 2022 Alsoliman. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Badr Salman H. Alsoliman, YmFsc29saW1hbkBrYXUuZWR1LnNh
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.