 Belinda Louie
Belinda Louie Elin A. Björling
Elin A. Björling Annie Camey Kuo3
Annie Camey Kuo3
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Educ. , 20 August 2021
Sec. Digital Learning Innovations
Volume 6 - 2021 | https://doi.org/10.3389/feduc.2021.566909
This article is part of the Research Topic Re-Imagining Learning Spaces With Immersive Digital Environments View all 5 articles
Currently there are 4.9 million English Language Learners (ELLs) in the United States, however, only 2% of educators are trained to support these vulnerable students. Educational robots show promise for language acquisition and may provide valuable support for ELLs, yet, little is known about social robots for this population. Inviting participants as cultural informants can ensure that the robot is appropriately designed, situated and adopted into that educational community. Therefore, we conducted an exploratory study using interactive group interviews with 95 ELLs (kindergarten through fifth grade) from 18 different home language backgrounds. We also interviewed 39 ELL parents and eight elementary school educators to understand their views of educational robots. Responses to robot images suggested a preference for a popular educational robot. Parents expressed a strong desire for educational robots to support their children at school. While children embraced the idea of a robot at school, some expressed concerns about the potential for robots to be disruptive. School educators saw the potential for educational robots to support teachers in meeting instructional needs but also raised salient concerns. Exploring social robots with ELLs as cultural informants was a valuable exploration to determine important factors in social robot design and implementation for a diverse educational setting.
In the United States, there are over five million English language learners (ELLs) and that number is steadily increasing (Hussar et al., 2020). However, only 2% of teachers in the US are adequately trained to address the complex needs of these ELL students (Education Statistics, 2019). Consequently, ELLs are more likely than any other group of students to be taught by a teacher who lacks appropriate professional preparation in the socio-cultural issues, the curricular adaptation, and the research-based pedagogical differentiation essential to ELLs’ academic growth (Quintero and Hansen, 2017; Education Statistics, 2019). ELLs also suffer from insufficient resources in schools. It is not uncommon for many ELLs to receive only 30 min or less of instruction focusing on the phonemic, morphological, and syntactic properties of the English language during a 6-h day school day (Louie, 2018). The lack of professional teacher preparation and adequate classroom support leads to the likelihood of teacher burnout (Gándara and Maxwell-Jolly, 2006), resulting in an increasing unmet instructional need for a vulnerable student population.
Social robots have been shown to provide social interaction in language learning thereby increasing motivation and in–task engagement, all the while, decreasing anxiety (Randall, 2019). The field of robot-assisted language learning (RALL) is developing rapidly with the use of robots as tutors in both first- and second-language learning (van den Berghe et al., 2019). Young students demonstrate increased language development (Kanda and Ishiguro, 2005; Chang et al., 2010; Lee et al., 2011; Kory and Breazeal, 2014; Gordon et al., 2016; Park et al., 2017) and academic engagement (Chen et al., 2011; Moriguchi et al., 2011) after working with an educational social robot. In addition, teachers have found educational robots to enhance classroom instruction (Lee et al., 2008; Fridin and Belokopytov, 2014; Serholt et al., 2014; Kory Westlund et al., 2016). Educational robots have the potential to support customized instruction for ELLs while assisting teachers in increasing their instructional capacity. Similar to classroom instruction, educational robots need to be culturally appropriate in order to be engaging and effective for culturally diverse learners (Nomura et al., 2008; Trovato et al., 2012; Lee and Sabanović, 2014; Andrist et al., 2015; Shidujaman and Mi, 2018). Furthermore, successful academic growth of ELLs’ rests upon the collaboration among all the stakeholders: teachers, parents and students (Lin et al., 2012; Serholt et al., 2017). There is limited information in the existing literature about these three groups’ perceptions and expectations of the functions and the benefits of educational robots. Therefore, we designed this research study to facilitate the collaboration among them in RALL by interviewing all three groups in one urban school district. These participants experienced the same instructional and curricular environment, shaped by the district’s mission and development plan. Our goal was to explore to compare social robot perceptions and expectations among three educational stakeholder groups.
To gather and incorporate perceptions and preferences from a diverse ELL setting, we used a participatory design (PD) approach. PD is an appropriate approach for exploring the design requirements for social robots due to its commitments and meaningful engagement of people in the design process (Björling and Rose, 2019). In PD, the goal is not to just understand people in an effort to build systems for them, but rather to design co-operative and collaborative design relationships that can empower users and make practical or political improvements in people lives (Spinuzzi, 2005). Involving culturally-diverse users (e.g., students) and stakeholders (e.g., parents and teachers) in the design process allows for improved and engaging design, improves the user experience, and results in greater academic gains and ownership of the technology-based learning. For this reason, we approached our research using the Culturally Localized User Experience (CLUE) framework (Sun, 2012) as a design thinking protocol that prioritizes human experience through ideation, prototyping and testing and has been found successful with multicultural users. Sun places importance on including the voices of participants as cultural informants in the research process and eventual design. In the current study, we studied the perception of the educational robots in both English Language Learners, ELL parents, and ELL teachers in three areas: 1) Potential usefulness of social robots, 2) Preferences in robot appearance, 3) Concerns about robots in the classroom. It is well documented that for language learners to be successful in the classroom, parents and teachers must be included in the curriculum and instruction. Therefore, a triangulated analysis of students’, parents’, and teachers’ perceptions will provide more comprehensive insights and suggestions in designing features and interaction for educational robots.
In this paper, we present the results of a pilot study exploring perceptions of robots for ELLs, their parents, and their teachers (See Figure 1 for an illustration of a teacher leading a small group activity with students). This exploratory study of ELL, parent, and teacher responses to robot images and their expectations for educational robots in supporting ELLs at school is a necessary first step in ensuring appropriate design and application of educational robots for the ELL community.
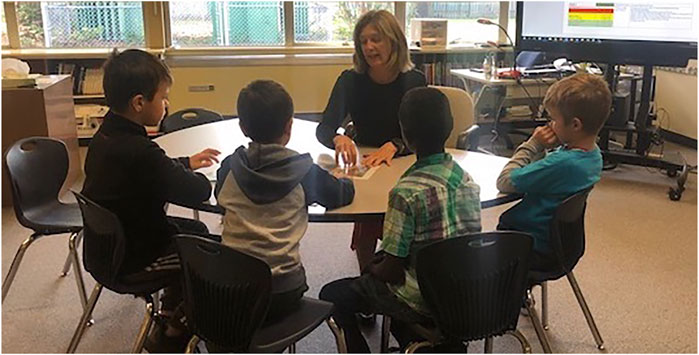
FIGURE 1. Students engaged in a group activity with a teacher.
Approximately one in five students in the United States, more than 12 million children, speak a language other than English at home (Camarota and Zeigler, 2015). Approximately half of these students are officially classified as ELLs, which signals they have not yet met the established English proficiency requirements (Boyle et al., 2010). ELLs, a heterogeneous group from a wide range of cultural and language backgrounds, have tremendous academic, linguistic, and civic resources and potential to enrich our school system. Glaring and persistent discrepancies in academic performance begin to emerge between ELLs and their fluent English speaking peers. ELLs face formidable challenges inside and outside school (Suárez-Orozco et al., 2015). At school, the lack of access to more challenging and interesting classes, and the tedium of remedial education causes ELLs to further lose their motivation for learning (Meltzer and Hamann, 2004; Callahan et al., 2010). According to Census 2020 (Martin, 2018), only 39.1% of ELLs own tablets and 50% own a desktop or laptop computer; almost 30% below their non-ELL counterparts. Their lack of access to technology resources has impeded their academic progress with the rapid increase of technology-enhanced instruction during the pandemic (Uro et al., 2020).
Although learning English was clearly important to students, research indicated that after 7 years in the U.S. on average, only 7% demonstrated academic English proficiency equivalent to native English-speaking students their age (Gaytan et al., 2007). Despite the need for ELLs to increase their language use in class, many educators often allow their less proficient students to remain silent or to participate less than their English-fluent peers (Mohr and Mohr, 2007). Subsequently, many ELLs become more timid or reluctant to participate in class discussions and thereby assume a more passive role in classroom interactions. The lack of teacher-supported oral interaction leads to a feeling of neglect and frustration and despair among ELLs. Educational robots, with culturally appropriate design, may increase ELL oral interaction and participation in the classrooms. Because teachers and parents are key components to ELL success. It is imperative for researchers to include input from parents and teachers in the introduction of social robots designed to support ELLs (Toh et al., 2016).
Exploring the users’ expectations and beliefs about robots is an important component of adoption. In a long term study of a home-based robot, De Graaf and Allouch (2013) provides a framework of adoption that includes six phases of robot acceptance; expectation, encounter, adoption, adaptations, integration, and identification. Prior to the third phase of adoption, De Graaf suggests that both the expectation and the encounter phases are important to consider given they proceed adoption. During the expectations phase, users learn about the technology, determine its value, and form expectations and attitudes toward it. For this reason, exploring expectations, and understanding a user’s expectation of a social robot may be integral to eventual adoption. This may be especially true in a diverse educational setting. Whether educational robots are useful to support learning also rely on students’ approval of both the robots, their anticipation of what robots can do, and their perceived positive consequence of the robotic behaviors (Norman, 2004). Special consideration for design choices of robots are needed when robots interact with learners from different cultural and linguistic backgrounds (Vogt et al., 2017). Cultural variables must be first examined and then applied to the design and interactions of social robots because culture affects users’ prior perceptions and responses to the robots (Gelfand and Kashima, 2015).
Robots have been used as part of STEM education in order to increase technology literacy. Benitti (2012) reviewed how robots could enhance the learning of high school students on LEGO Mindstorms. Mubin et al. (2013) conducted a more comprehensive analytic review of studies on robots in education published from 2000 to 2012 to understand the nature of the robotic applicability in order to identify areas for improvement and questions for further research. Their recommendations included linking the learning activity and subject to the interaction style of robot, collaborating with teachers to determine curricular areas for robots to support, adapting social robots to the various attributes of learners, and identifying practical aspects of utilization of robots in education. Social robots or assistive robots are being used successfully within educational settings as tutors, peers and learners. In a review of research of robot studies post-2000, Mubin et al. (2013) found robots are predominately used to provide language, technology or science education, and the role of the robot takes on the role of a tool, tutor, or peer in the learning activity. They recommended further research to explore “the practical aspects of the utilization of robots in education” (p. 5). Toh et al. (2016) assessed the effectiveness of using robots in education by analyzing studies published between 2004 and 2013 calling attention to the influence of robots on the behavior and development of students, the perception of stakeholders (parents, educators and children), and the importance of design or robot appearance to increase the effectiveness of educational robots.
To support student language development, many ELL classrooms have acquired computer-assisted learning programs (Barber et al., 2018; Cassady et al., 2018; Sharifi and Farrokh, 2019). Such programs aim at improving the fluency of ELLs using texts at their reading levels. The goal is using repeated readings of comprehensible passages to enhance ELLs’ language growth. Unfortunately, these programs are greatly limited in that they provide screen-based instruction without the social interaction which is sorely needed for ELLs to accelerate their English development (van den Berghe et al., 2019; Walqui and Bunch, 2019; García et al., 2017).
Social robots have shown to provide social interaction in language learning thereby increasing motivation and in–task engagement, all the while, decreasing anxiety (Randall, 2019). A growing body of literature reported that social robots support language development because they encourage participation, making children more engaged in their language learning activities. Many studies have been conducted on different facets of language in young children’s interaction with social robots mostly in a lab setting. Kory et al. (2013) observed that preschool children engaged in language mimicry and communicative behaviors when playing a digital game with a social robot and their parents. Westlund (2015) found a social robot could improve 4–6 year old children’s oral language skills. Gordon and Breazeal (2014) found personalization increase language acquisition during a story-creation tablet game for 4–8 year old children. In the second language context, Gordon et al. (2016) reported gains in Spanish vocabulary and increase in valence when working with a social robot. Breazeal et al. (2016) studied how greater non-verbal contingent attentiveness shown in robotic interaction helped preschoolers retained more information. Park et al. (2017) reported that an attentive listening robot elicited increased storytelling from children.
The impact of robotic companion on children’s interaction may be influenced by their culture. Therefore, exploration of cultural issues affecting interactions with social robots is the necessary next step. Cross-cultural studies in adults’ attitudes towards robots indicated that perceptions of and comfort with robots are influenced by the interactions among many factors such as cultural norms, religious beliefs, education, and languages (Trovato et al., 2012). Tapus et al. (2007) asserted that appropriate social behavior plays a critical role in assisting people. To make this possible, robots must be endowed with human-oriented interaction skills and capabilities, exhibit context and user-appropriate social behavior, and focused attention and communication on the user in order to help the user achieve specific goals. These verbal and non-verbal means of communication are culturally bound (Tracy and Robles, 2013). In addition, Short et al. (2014)found that relationship building was important for longitudinal robot-interaction with children and likely related to increased learning. Therefore, taking a student’s culture and home language into account is imperative.
As the US student population diversifies in cultural values and home languages, it is critically important that understand how robots are perceived by culturally diverse learners if we hope to design appropriate and engaging educational robots. Understanding children’s perceptions of robots will aid in the appropriate design and development of child-robot interactions as well as improve the success of educational robots. Children’s perceptions of social robots are not only shaped by robotic behaviors and appearances, but also by the previous exposure to robots in the media and in their own experiences (Calvert et al., 2014; Brunick et al., 2016). Lin et al. (2009) conducted a survey of Taiwanese fifth graders and found that educational robots vary in appearance. 59% of the fifth graders felt a robot would be a good companion or tutor in the school setting. Woods (2006) conducted a survey of 159 fifth and sixth graders exploring their responses to 40 robot images. Children identified human-like robots as aggressive, but human-machine like robots as friendly. These data support the concept of the Uncanny Valley (Seyama and Nagayama, 2007) which suggests that as robots become more real, they can also become more disturbing. Children also identified humanoid type robots are more likely to understand them. Hyun et al. (2010) found that young children accepted a robot into their classroom and saw the robot as a peer. In addition, they found that many children wanted to interact with the robot in a small group. The above studies with children did not measure or address ethnicity or cultural or language backgrounds of their participants. Therefore, how well these findings apply to very diverse ELLs remains unknown?
Recent studies with children and robotics suggest that design partnership with end-users, such ELLs, their parents, and their parents, is an area of opportunity and growth child-robot interaction (CRI) research (Charisi et al., 2018). Engaging school-aged users in participatory hand-onisi activities can yield data on their perception of social robots and their design needs (Kory-Westlund and Breazeal, 2019) for interacting with the robots (Mack et al., 2019). Knowing that socio-cultural background influences the perceptions and values of a cultural group member (Vacca, 2019), therefore, we sought to address the following questions.
1. What robot images are preferred by ELL students, parents, and educators?
2. How do ELL teachers perceive the role and value of educational robots in their classrooms?
3. How do ELL students, parents, and educators perceive the value of educational robots in a language learning environment?
4. What concerns do the ELL students, parents, and educators have regarding educational robots in the school setting?
The overall methodology for this study stemmed from Participator Design (Spinuzzi, 2005). Therefore our customized methods result from adjusting to the needs of our unique population (Putnam et al., 2009). Given the growing unmet needs of English language learners, the potential for educational, social robots seems apparent. However, as a vulnerable population, there is a real need to understand and address the cultural aspect of educational, social robots. As mentioned above, we utilized the CLUE Framework (Sun, 2012) suggesting we approach our participants as cultural informants giving us insight into their preferences and beliefs. Therefore, we conducted an exploratory, interactive study capturing data from potential educational robot users and stakeholders. Based upon a study design by Woods (2006), we utilized images of existing robots to explore robot perceptions during interactive interviews with participants whose demographics are detailed below.
This study was part of a 5-year, classroom-based project on enhancing instruction for English language learners. Prior to conducting the current study, we obtained university institutional review board approval and partner school approval for project studies understanding parents’ thinking, teachers’ ideas, and EL learners’ perception, interests, academic performance, and responses to instructional interventions. This study was included under a larger project exploring improvement of classroom activities for ELLs. Therefore, we were not required to obtain parental consent for child participation in the study.
ELL parents, teachers, and students were recruited from an urban and diverse public elementary school in the Pacific Northwest by the school-based liaisons of the professional training grant. These schools were comprised of 8–33% ELLs and 60–90% of low income households. Interested parents were interviewed after an educational event at a local community center or before or after school based upon their preference. Parents were invited to group interviews by a school-based grant liaison during an educational session specific to ELL parents. Staff were invited by a school-based liaison to participate in individual interviews either before or after school based upon their choice. All adults were consented prior to their interviews. Given the language barriers for parents and our English speaking research team, interpreters were used during the community center parent interviews. Individual and small group interviews took place in a classroom at their child’s school with a teacher present who also helped with language translation. Interviews ranged from 15 to 40 min depending upon the number of parents and their desire to share information.
Ninety-five students (ages 6–11) from a total of three elementary schools participated in our study. Student grades and ages are detailed in Table 1. 40% of students reported Spanish as their home language, but numerous other home languages were reporting including Tagalog and Marshallese. See Figure 2 for more detail about non-Spanish home languages. Parents of participating students were informed of the study taking place in their child’s classroom during the school day. Children were interviewed by their teachers during the school day as part of a pull-out ELL program.
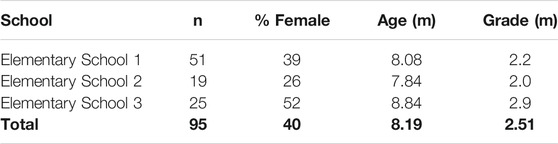
TABLE 1. Student sample demographics by school site. Bold values are totals.
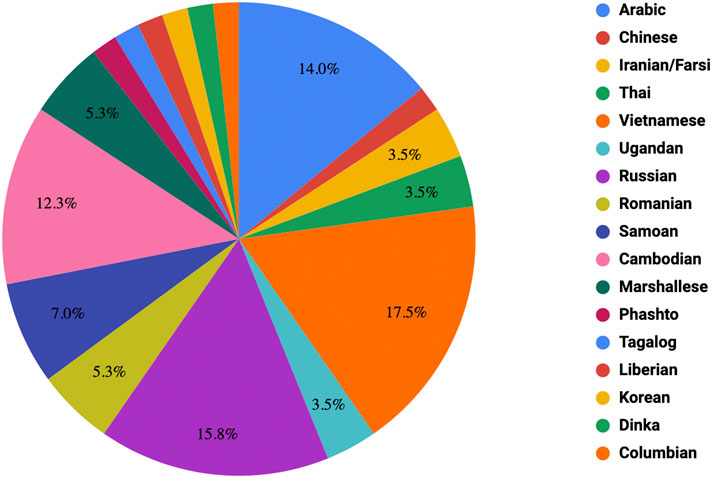
FIGURE 2. Illustration of non-Spanish student home languages.
Thirty-nine parents (not directly related to the student sample) from seven local elementary schools participated in our study. 56% of Parents interviewed spoke Spanish as their primary home language. Parents were interviewed individually, or in small or large, based upon their interview site. Large group interviews took place at a local community center after a parent education program Parents had the option to have their breakout lunch at a tables set up for the interview or eat lunch as normal in an adjoining space. See Table 2 for demographic details.

TABLE 2. Parent sample demographics (CC = Community center).
Eight educators (teachers, instructional coaches and an administrator) from seven local area elementary schools also participated in the activity interview. See Table 3.
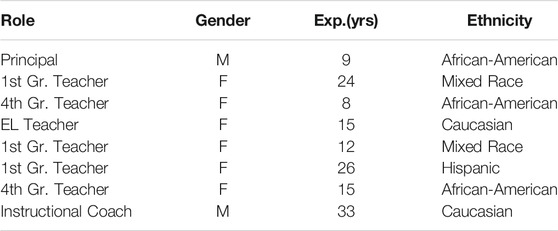
TABLE 3. Demographics of school educators sample (n = 8).
Interactive interviews were done with both parents and ELLs. Given potential language barriers, we wanted to engage them in multi-modal mediums for expressing data. Therefore, we displayed and gathered both verbal and visual information. We let all participants know that their participation was voluntary and they could disengage or leave at any time during the activity. Before teachers started the interactive interview with the children, they invited ELLs to join the robot activity or continue in their standard activity at that time. Teachers emphasized that it was the students’ choice to participate and all ELLs chose to participate in the robot activity. Alternative activities were readily available if students chose not to participate. Teachers explained the robot activity in child appropriate language and children’s individual verbal assent was obtained before the interactive interview. We gathered anonymous demographic data from parents and asked teachers to document ELL grades and ages. Parents and ELL student participants then completed interactive interviews where they participated in a hands-on value-assigned-to-robot activity as a prompt to trigger their responses to interview questions.
At the start of the activity, all participants were informed about the potential use of educational robots in the classroom and that we were curious about their perceptions of existing robots.
Participants were then shown six images of robots interacting with children. See Figure 3. Each robot was chosen given its previous use in studies with children. Two commercial robots were used; Jibo (Guizzo, 2014) and Nao (Robotics, 2016). In addition we shared images from two robot prototypes designed for teenagers (Rose and Björling, 2017). We also included an image of an educational robot specifically designed for young children, Dragonbot from MIT (Gordon and Breazeal, 2014). Finally, we included a soft-bodied flexible robot, Blossom, from Cornell University (Suguitan and Hoffman, 2018). In addition, blank post-its were available for participants who wanted to share another word or phrase.
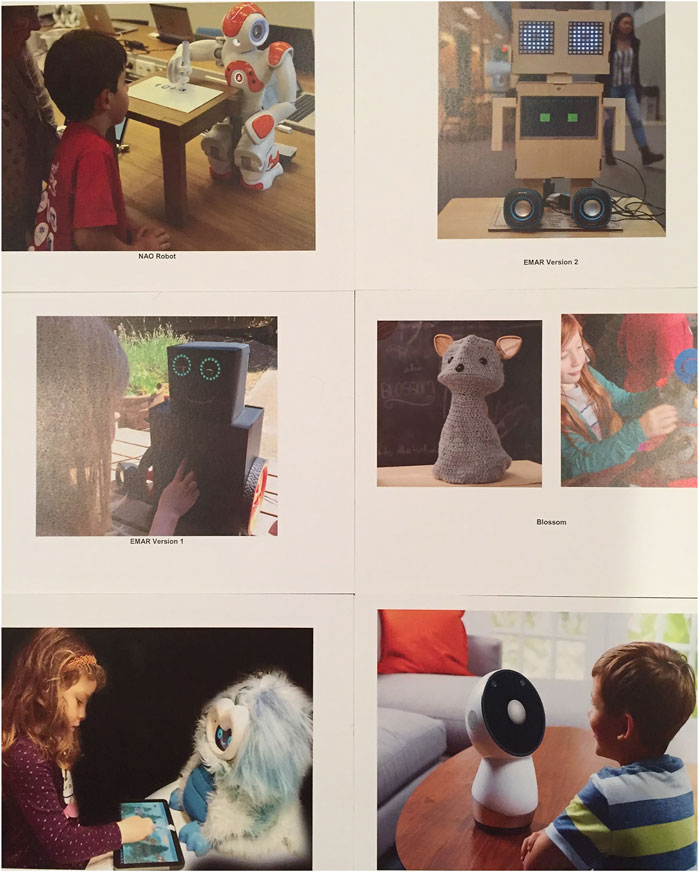
FIGURE 3. The six robot images shared with participants.
Based on a method used to gather impressions of robot images from teenagers (Rose and Björling, 2017) and emotional data (Toet and van Erp, 2019), we used an interactive activity and asked participants to respond to individual robot images using 12 emoji post-it notes. Emojis represented six positive attributes (e.g., Happy, Fun) and six negative attributes (e.g., Scary, Boring). We chose emojis knowing that there might be language barriers for some parents and students in our sample. See Figure 4.
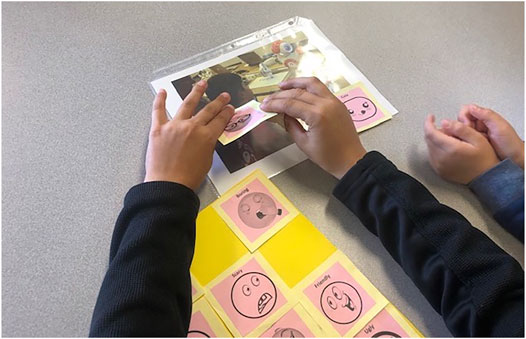
FIGURE 4. Students labeling a robot image with emoji post-its.
Participants were then asked the following questions:
1) What do you like about having a robot to help ELLs at school? and What worries/fears do you have about the robot working with students at school?
2) Which robot would you prefer to have at your school?
3) What worries/fears do you have about a robot working with students at school?
We used contextual probes to invite participants to elaborate or provide more detail. All participant interviews were recorded, translated when necessary, and transcribed for analysis. Photos were used to capture participant responses to robot images.
ELL students were interviewed by their teachers in small groups of 3–5 students. The interviews lasted about 20–30 min and took place during regular class instruction time. ELL parents were interviewed by the research team. Interviews were conducted in large group, small group, or individual interviews depending upon the parent’s choice. Large group interviews took place at a local community center after a parent education program. Given the language barriers for parents and our English speaking research team, interpreters were used during the community center parent interviews. Individual and small group interviews took place in a classroom at their child’s school with a teacher present who also helped with language translation. Interviews ranged from 15 to 40 min depending upon the number of parents and their desire to share information. Interpreters were used when translation was needed. ELL educators were interviewed by the research team and conducted at school, in small group or individual contexts depending upon the teacher’s preferences. Teacher interviews lasted between 20 and 30 min.
All interviews were transcribed using Rev.com transcription service. The authors conducted an applied thematic analysis as described by (Guest et al., 2011) on the transcriptions from all interviews (adults, children, and teachers) with a focus to explore our primary research areas: 1) Potential usefulness of social robots, 2) Preferences in robot appearance, 3) Concerns about robots in the classroom. Initially, each author explored the data using low level, emergent coding and gathered salient excerpts to a shared collaborative platform, Miro https://miro.com/app/dashboard/. Excerpts were then reviewed for salient, emergent themes that were most categorical (e.g., robot appearance, robot behaviors, and robot concerns) in an effort to describe the depth and breath of data from these interactive interviews. These emergent themes were refined and with specific evidence from the raw data and then further refined by all authors as a priori themes. These themes were then used for further data analysis. Interview transcripts, and raw data from activities were explored again to search for further both supporting and contradicting evidence in order to ensure that both depth and breadth of responses were captured. In the end, we felt our qualitative themes and excerpts accurately described the data.
Participant responded to robot images via post-it emojis and free form responses. Responses were counted and catalogued for each robot image. These data were then descriptively explored in SPSS version 24 (Corporation, 2016). In addition, an attribute score was created by giving a point for each assignment of positive attributes for an educational robot (e.g., smart, friendly) and -1 for negative attributes (scary, dumb). Then the score was calculated for each robot to determine an attribute total score. A positive percentage was also calculated by dividing the positive attributes by all attribute labels received. A linear regression was conducted to test the effect of age, grade, and home language on robot preference for the ELL sample.
The purpose of this study was to explore the perceptions and expectations of educational robots from three stakeholder groups (ELL students, parents, and school educators) to guide the design of robotic actions and interactions making preparation to introduce robots into classrooms to support the ELLs. Based on our interview transcript analysis, we are reporting our findings according the areas that guided our inquiry: 1) Potential usefulness of educational robots, 2) Preferences in robot appearance, and 3) Concerns about robots in the classroom.
Most students had a positive response to having a robot in their classroom. Students’ explanations ranged in the ways they thought the robots could help from “cleaning the classroom” [School 3, Grade 5] to homework and learning content including English. One student explained, “If you have to do partner read, it can do it with you.” [School 1, Grade 3] Students quickly saw the application of the robot to helping them with their language development, “if you speak a different language, it can help you speak English.” [School 2, Grade 1] Similar to the parent sample, students also identified the ability of the robot to support them socially at school. One student suggested, “[The robot] can help and like if you don’t have a person to play with they can play with you.” [School 1, Grade 3]
Almost all parents felt educational robots as support for their ELLs was a good idea. Many were visibly excited by the idea and asked how soon such devices might appear in their child’s classroom. Parents suggested that the robots would engage their children and might lead to increased academic performance. Some parents also articulated that a robot could be more helpful than a teacher due to its lack of judgment, potentially making it easier for children to take social risks and ask more questions. Parents reflected upon how many of their ELL children are shy and how that shyness inhibits their learning. They felt that shy children would be more open to interacting with a robot than a teacher or a peer. One Hispanic parent commented through the interpreter,
…because they like more technology, I think that it would be comfortable … just like my kids that are shy sometimes they have questions, but because of embarrassment they don’t ask, they keep those questions to themselves.
Teachers echoed the parents’ desire for the potential for educational robots to provide further support for the ELL students. As one teacher expressed, “I see this as something really powerful, because I think this would be less intimidating for a kid to interact with a robot.” [fourth Grade Teacher] The school administrator also shared his enthusiasm about the idea of an educational robot to support ELLs at school.
It gives me excitement. The key would be that they would interact with kids, and kids could interact with them with input along the way. Kids don’t usually have that kind of opportunity to deal with robotics unless it’s from a game or something. So I’m excited to see what it might bring to the learning environment. [Principal]
In short, students, parents, and educators stated that they were very excited about the possibility of working with an educational robot. All of them would like to know when they would get a robot in the children’s classrooms.
Although our interview questions focused on the use of robots for language learning purposes, a few parents expressed their opinions on the potential for the robot to meet some of their child’s unmet social or emotional needs at school. One parent even suggested that the robot could help in social situations, such as bullying, “…it would help kids so they can communicate, it could help with the bullying too maybe” [CC Parent, Spanish]. Another parent suggested that children are not sharing their feelings with parents and adults and that they may share what is troubling them with a robot, “…sometimes the kids don’t come to us as moms and parents, but maybe they would share with the robot” [CC Parent, Spanish]. Parents could see the advantages of having a robotic tutor or peer who would not be judgmental of the students’ performance, making students more comfortable to practice speaking English. Educators also stated that an educational robot could provide progress data to help evaluate their students, for example, speech patterns of ELLs which were not likely to be captured by classroom assessments.
During the emoji attribute labeling activity, participants labeled robot images with both positive and negative attributes. Students and educators gave the most positive attributes to EMAR V1. Parents associated the most positive attributes for Blossom followed by Nao. Teachers rated both EMAR V1 and Nao with only positive attributes (thus an attribute percentage score of 100% for each). See Figure 5 for more detail.
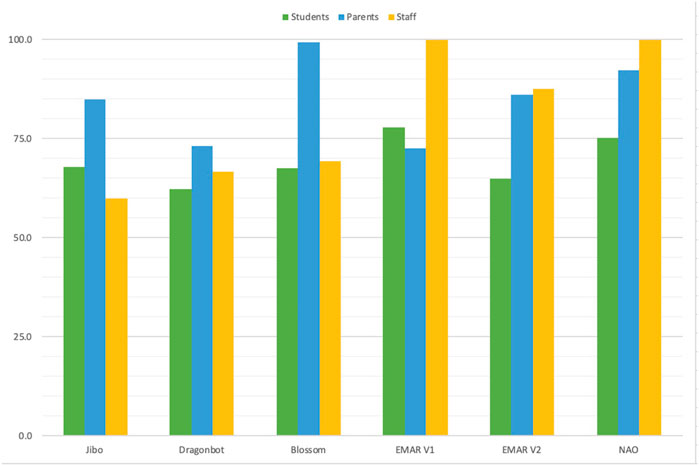
FIGURE 5. Illustration of parent, staff, and student positive attribute percentages for each robot.
Parents used the most cute, fun, and friendly emojis to describe Blossom. Whereas Nao was most often labeled as smart and good. In open response post-its, a teachers noted that Jibo was “lacking in features”, and EMAR V2 was “not terribly kid friendly.” Teachers did like EMAR V2 and added labels such as “creative” and “inquisitive.”
Dragonbot although specifically designed for, and well liked by young children (Westlund et al., 2015), received the most labels for the categories of bad, ugly and scary for all three samples. Parents found Nao’s form to be more “real” and thus, “more able to help.” The following quote illustrates the dynamic between these two robots.
I like Nao … it is colorful … it has a body, it gets hands … it looks real … looks friendly and you can depend on him … I don’t like Dragonbot. It has staring eyes. He is really hairy. It does not look real … looks like a stuffed animal. [ES Parent, Arabic]
A few teachers expressed the importance of the robot looking friendly and not scary given the vulnerability of ELLs. Parents expressed that a human-like appearance for Nao was very important, whereas a machine-like robot, such as Jibo, was not a good idea. “Jibo looks more like a machine, like Google home … if the robots are there to help children, it should not look like machine.” [ES Parent, Arabic]
Parents did share preferences about which robots they would choose for their children. Most of them considered which robot’s appearance would appeal to their children. They tended to pick a robot which looked “real” so that it would be more effective to assist their children’s learning. The idea of a robot looking smart and not scary was also important to parents.
At the end of the interview activity, students were asked their preferred robot and Nao was most preferred by 48% of students. A significant difference was found when comparing participant age and their robot preference. Results of a linear regressions showed a significant effect between the participant’s age and their preferred robot, R2 = 0.13, F (1, 93) = 13.93, p < 0.001. The significance was mainly due to the large difference between older students preferring the Nao robot and younger students preferring Blossom. See Figure 6 for an illustration.
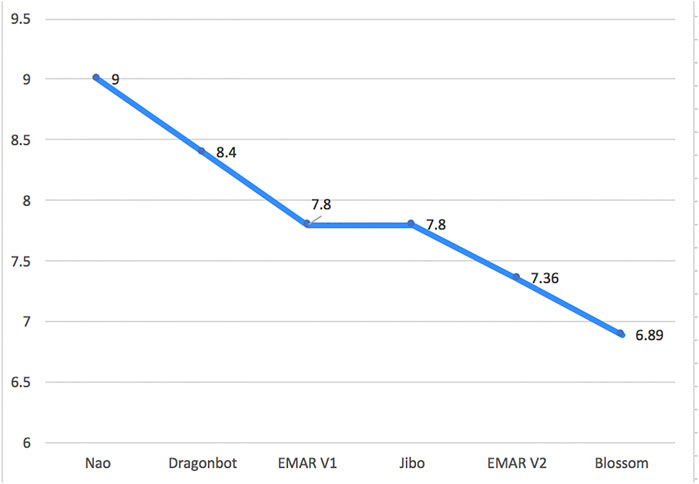
FIGURE 6. Illustration of students’ robot preferences by mean age.
There were no significant differences of preferred robots based upon home language regions. However, given the diversity of our student sample, we descriptively explored student’s home language in relation to their robot choice. A diverse choice of robots were identified by students in each home language regions. See Figure 7 for more detail.
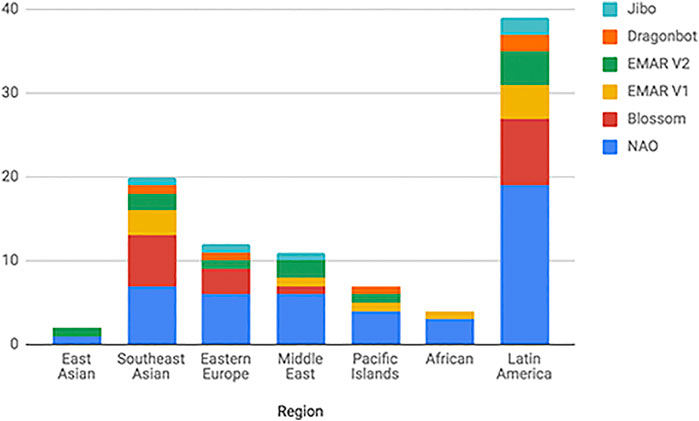
FIGURE 7. Illustration of student robot preferences by home language region.
Parents raised the concern of a robot replacing a teacher and the potential lack of empathy if this were the case.“ a robot would not know when a boy is sad when a child is sad … ” [CC Parent, Spanish]. Teachers also saw the role of the robot as a support tool rather than a replacement for a teacher. One teacher suggested,
I wouldn’t look at this as simply something that is going to teach the kid because then we’re in the wrong model if the whole thing is you substituting for the teacher.[fourth Grade Teacher]
A second theme that arose from parents was the concern around privacy. For example, one parent expressed concerns about the robot taking video and pictures.
I worry that the robot can be hacked and people can spy on my children…. I also want to know whether the children’s images and data can be accessed by others. [ES Parent, Chinese]
Similar to parents, teachers also expressed concerns about privacy. One first grade teacher suggested that it would be necessary to ensure that the district was not using the robot as a form of surveillance. Finally, a common concern for many of today’s parents (Hinkley and McCann, 2018), a few parents expressed concerns about the robot adding more screen time to their child’s day. “If a screen is connected to the implementation of the robotic functions, I worry that there will be too much screen time for the children” [ES Parent, Chinese].
In summary, parents emphasized that they did not want any robot to replace the teacher because teachers could respond to their children’s emotional and academic needs. They are were concerned that children might consider the robots as playmates. They felt that learning, not playing, should be the focus of school time. Because some robots had a screen, some parents expressed concerns about increasing screen time for their children.
Students concerns were different from those of teachers and parents. ELLs in this study did not have any experience of the robots as learning companions, nor could they perceive that robots could carry out instructional action in their classroom. When asked if they had any concerns about having a robot in the classroom, their main worry was that it would be destructive in the classroom and would“ mess everything up.” [School 3, Grade 2] One student explained, “[I ] would worry if the robot breaks something.” [School 2, Grade 5] Another shared “people are working and it doesn’t like.. the robot takes the papers away and rips it and throws it in the recycling.” [School 1, Grade 1] Several students thought the robot “can explode” might “kick someone,” or “unplug all the computers.” As children, the students’ articulation of robot concerns sounds similar to misbehavior in the classroom. Students’ responses reflected the robotic behaviors that they had seen in movies or computer games. None of them have been exposed to robotic activities outside the entertainment media.
Overall ELL students, parents, and school educators welcomed the idea of an educational robot to support English language learners at school. This is not surprising given the current dearth of supports for ELL students and teachers currently in the US school system. Specific results from this study augment the existing findings from teachers and students regarding educational robots.
Robot preferences differed among ELLs, parents, and school educators. The ELL preference for a humanoid robot design as opposed to an animoid or mechanicistic robot is also noteworthy. The survey by Woods (2006) also found that a mixture of human–machine features is most desirable for children whereas Lin et al. (2009) found that Taiwanese fifth graders preferred an animoid over a humanoid. Research suggests that human-like characteristics in a robotic agent can evoke empathetic responses in humans (Riek et al., 2009), but making robots too human-like can also result in a repulsion known as the “uncanny valley effect” (Strait et al., 2017). Given the popularity of Nao in educational settings (Zaga et al., 2015; Belpaeme et al., 2018), Nao is likely to be the optimal combination of human-like characteristics without being overly humanoid. Parents gave the most positive attributions to Blossom, the soft-bodied, animal-like robot in our study. Animal-like robots have shown great promise in child-robot interaction studies (Westlund, 2015) and especially for younger children Breazeal et al. (2016), and in therapeutic support of children with autism (Scassellati et al., 2012). School educators gave the most positive attributes to EMAR V1 (a boxy and very simple robot design) and Nao (a humanoid, high tech design). Interestingly, these two robot designs are quite diverse and may speak to the diversity of students in these schools. Nao received the highest attribute rating from ELLs and was liked by parents and school educators. Since adoption for ELLs is a necessary component to educational robot success, it appears an ideal choice.
Overall, ELL students, parents, and teachers envisioned educational robots as classroom aides in a variety of roles, from language support for ELLs to accompanying students to various classrooms. Teachers also expressed excitement over the potential additional help in the classroom for the ELLs. Parents and teachers identified one potential benefit of child-robot interaction: increased risk taking. Robots have already shown to increase children’s risk-taking (answering more questions, taking guesses, trying new language) and thereby learning (Leyzberg et al., 2012). School educators wanted the robot to speak multiple languages to be more helpful with ELLs, a role that no teacher could fulfill. Many ELLs are placed in schools in which no teacher speaks their home language (McFarland et al., 2017). This desire for the robot to have beyond-human capabilities is not uncommon (Ellis et al., 2005).
Both parents and teachers had concerns about the role of the robot as a replacement for the teacher. This concern is similar to those reported by Serholt et al. (2014) after surveying elementary and middle school students regarding robots in schools. Certainly when working with vulnerable children, a reduction in person-to-person interaction could cause ELLs to feel even more disconnected from the classroom and associated culture. Therefore, the robot’s role and relationship with the teacher will be imperative to the success of an educational robot in the classroom. Teachers raised another area of concern about student and teacher privacy, which is possibly risked by robot technology in the classroom.
Teacher concerns about surveillance in the classroom are well documented (Page, 2017a,b). Baxter et al. (2015) discussed the importance of ethical explorations regarding educational robots in the classroom. They cited an example where a teacher suggested a surveillance task to the robot and reflected on the barriers created by giving the robot a supervisory role. In our study, teachers voiced concerns about surveillance of their teaching, but parents did not raise concerns about privacy.
Survey results gathered by Kennedy et al. (2015) suggested that teachers shared concerns that a robot could distract children from learning. Teachers also worried about added workload brought on by orchestrating instructional delivery with the robot. Serholt et al. (2014) surveyed teachers and reported similar teacher concerns related to the potential disruption of classroom activities and fair access issues if robots were placed in the classrooms.
Students’ concerns about the robot misbehaving or damaging school property is surprising. Developmentally it supports their level of thinking about familiar contexts. Lin et al. (2009) found that 53% of the fifth graders surveyed suggested that a robot in the classroom might distract them from their learning. This may be a common theme among children. Potentially children may think of the robot as a peer and not a teacher, given the robot’s disruptive behaviors are all similar to those of a child. Viewing the robot as a peer has been shown more effective in educational settings as compared to the robot as a tutor (Zaga et al., 2015). This concern that the robot may be disruptive might also help to explain why social robots have been abused and harassed by children in the past (Nomura et al., 2016).
The range of concerns about educational robots across ELLs, parents, and staff reflect the diversity of a school setting. Concerns need to be taken seriously and should be addressed throughout design and implementation. In addition, it is likely that concerns might be different before, during and after deployment. Therefore, gathering data and responding to concerns from all stakeholders throughout any educational implementation will likely be valuable in ensuring the success of the robot.
We were slightly surprised that given the ethnic diversity of our participants, parents did not mention any cultural or language concerns regarding the educational robot. However, the teachers and administrator did have concerns related to cultural appropriateness. A few teachers expressed the concern that for the robot to be successful, it would need to be multilingual. “It would need multiple languages besides English … We have so many different languages at one school.” (PB Teacher) The school administrator suggested the robot would need to understand multiple dialects and accents in order to be successful in helping ELL students, “But it would have to be dynamic enough to hear and respond to regional dialects and not have a person constantly repeating themselves.” (Administrator, ES).
For all parents of English learners, their primary concern was the language and academic growth of their children. They expressed excitement about the idea of a social robot in school in hopes that it would further engage and encourage their child’s learning. Given that culturally responsive learning includes communication and inclusion of ELL parents, parents may offer important input toward the design of a culturally responsive robot at school. Educators desired robots that could complement their teaching. For example, some suggested robots that responded appropriately to students’ in the students native language or offered translation could help during instruction.
All of our participants have limited knowledge or experience with educational robots. Therefore, all of these data need to be situated within this context of speculation. Given our small sample of teachers, it was only possible to descriptively compare ELLs, ELL parents, and educators in analysis. In addition, our participatory design allowed for variation in both our sites, and customization of our method to meet the needs of each sample. However, these variations may limit the application of our findings. We utilized a convenience sample from our current community network and our sample included many Spanish speaking parents and children, therefore, exploring this procedure in other communities and home languages may result in very different findings. Our selection of available and approved robot images may have also influenced the responses from participants. And, given this study only used images of robots, further research must explore actual robot interactions with children to truly understand the potential usefulness of educational social robots for English Language learners. Future interaction design research is also needed to appropriately design effective educational interaction for ELLs.
In summary, all of our participants saw the potential benefits of educational robots to provide individual engagement and instruction for ELLs at school. Teachers and parents both recognized that an educational robot cannot replace the teacher and positive robot attributes varied across all three samples. Future research is needed to more completely understand how ELLs perceive educational robots and to design appropriate child-robot interactions that would support language acquisition in such a diverse population of ELLs in public schools. Personalizing robots has been shown to significantly increase learning among non-ELL students (Leyzberg et al., 2014) suggesting culturally appropriate design will benefit ELLs. However, more research is needed to determine what type of robot interactions will be most effective and appropriate for English language learners. The strong desire for social robots in this role is evidence for the potential positive impact educational robots could have for improving English language acquisition for ELLs.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
The studies involving human participants were reviewed and approved by the University of Washington Institutional Review Board. Written informed consent from the participants’ legal guardian/next of kin was not required to participate in this study in accordance with the national legislation and the institutional requirements. Written informed consent was obtained from the individual(s), and minor(s)’ legal guardian/next of kin, for the publication of any potentially identifiable images or data included in this article.
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
This project was funded in part by the OELA, US Department of Education, Grant No. T365Z170007, Project Teaching English Language Learners-Professional Development. The lead author is the PI on this funding grant.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Andrist, S., Ziadee, M., Boukaram, H., Mutlu, B., and Sakr, M. (2015). “Effects of Culture on the Credibility of Robot Speech: A Comparison between English and Arabic,” in Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (ACM), 157–164.
Barber, M., Cartledge, G., Council, M., Konrad, M., Gardner, R., and Telesman, A. O. (2018). The Effects of Computer-Assisted Culturally Relevant Repeated Readings on English Learners’ Fluency and Comprehension. Learn. Disabilities: A Contemp. J. 16, 205–229.
Baxter, P., Ashurst, E., Kennedy, J., Senft, E., Lemaignan, S., and Belpaeme, T. (2015). “The Wider Supportive Role of Social Robots in the Classroom for Teachers,” in 1st Int. Workshop on Educational Robotics at the Int. Conf. Social Robotics Paris, France.
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., and Tanaka, F. (2018). Social Robots for Education: A Review. Sci. Robot. 3, eaat5954. doi:10.1126/scirobotics.aat5954
Benitti, F. B. V. (2012). Exploring the Educational Potential of Robotics in Schools: A Systematic Review. Comput. Education. 58, 978–988. doi:10.1016/j.compedu.2011.10.006
Björling, E., and Rose, E. (2019). Participatory Research Principles in Human-Centered Design: Engaging Teens in the Co-design of a Social Robot. Mti. 3, 8. doi:10.3390/mti3010008
Boyle, A., Soga, K., Hurlburt, S., and Taylor, J. (2010). Title Iii Accountability: Behind the Numbers. Esea Evaluation Brief: TheEnglish Language Acquisition Language Enhancement, and AcademicAchievement Act Washington, DC: US Department of Education.
Breazeal, C., Harris, P. L., DeSteno, D., Kory Westlund, J. M., Dickens, L., and Jeong, S. (2016). Young Children Treat Robots as Informants. Top. Cogn. Sci. 8, 481–491. doi:10.1111/tops.12192
Brunick, K. L., Putnam, M. M., McGarry, L. E., Richards, M. N., and Calvert, S. L. (2016). Children's Future Parasocial Relationships With Media Characters: the Age of Intelligent Characters. J. Child. Media. 10, 181–190. doi:10.1080/17482798.2015.1127839
Callahan, R., Wilkinson, L., and Muller, C. (2010). Academic Achievement and Course Taking Among Language Minority Youth in U.S. Schools: Effects of ESL Placement. Educ. Eval. Pol. Anal. 32, 84–117. doi:10.3102/0162373709359805
Calvert, S. L., Richards, M. N., Jordon, A., and Romer, D. (2014). Children’s Parasocial Relationships. Media Well-Being Child. adolescents., 187–200.
Camarota, S. A., and Zeigler, K. (2015). One in Five Us Residents Speaks Foreign Language at home. Cent. Immigration Stud. U.S. Newswire
Cassady, J. C., Smith, L. L., and Thomas, C. L. (2018). Supporting Emergent Literacy for English Language Learners With Computer-Assisted Instruction. J. Res. Reading. 41, 350–369. doi:10.1111/1467-9817.12110
Chang, C.-W., Lee, J.-H., Chao, P.-Y., Wang, C.-Y., and Chen, G.-D. (2010). Exploring the Possibility of Using Humanoid Robots as Instructional Tools for Teaching a Second Language in Primary School. J. Educ. Technology Soc. 13, 13–24.
Charisi, V., Alcorn, A. M., Kennedy, J., Johal, W., Baxter, P., and Kynigos, C. (2018). “The Near Future of Children’s Robotics,” in Proceedings of the 17th ACM Conference on Interaction Design and Children (ACM), 720–727. doi:10.1145/3202185.3205868
Chen, N.-S., Quadir, B., and Teng, D. C. (2011). Integrating Book, Digital Content and Robot for Enhancing Elementary School Students’ Learning of English. Australas. J. Educ. Technology. 27 (3), 546–561. doi:10.14742/ajet.960
De Graaf, M. M. A., and Ben Allouch, S. (2013). Exploring Influencing Variables for the Acceptance of Social Robots. Robotics Autonomous Syst. 61, 1476–1486. doi:10.1016/j.robot.2013.07.007
[Dataset] Education Statistics, N. C. o. (2019). Percentage of Public School Teachers Who Teach English Language Learner (Ell) Students and Students with Disabilities and Percentage With Selected Qualifications or Coursework, by Selected Teacher and School Characteristics: 2017–18. Available at: https://nces.ed.gov/programs/digest/d19/tables/dt19_209.42.asp (Accessed 01 05, 2021).
Ellis, L. U., Sims, V. K., Chin, M. G., Pepe, A. A., Owens, C. W., Dolezal, M. J., Shumaker, R., and Finkelstein, N. (2005). “Those A-Maze-Ing Robots: Attributions of Ability Are Based on Form, Not Behavior,” in Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Los Angeles, CA): SAGE Publications Sage CA), 49, 598–601. doi:10.1177/154193120504900382
Fridin, M., and Belokopytov, M. (2014). Acceptance of Socially Assistive Humanoid Robot by Preschool and Elementary School Teachers. Comput. Hum. Behav. 33, 23–31. doi:10.1016/j.chb.2013.12.016
Gándara, P., and Maxwell-Jolly, J. (2006). Critical Issues in Developing the Teacher Corps for English Learners. Preparing Qual. educators English Lang. learners: Res. policies, practices., 99–120. doi:10.4324/9781410617347-9
García, O., Johnson, S. I., Seltzer, K., and Valdés, G. (2017). The Translanguaging Classroom: Leveraging Student Bilingualism for Learning. Caslon Philadelphia, PA.
Gaytan, F. X., Carhill, A., and Suarez-Orozco, C. (2007). Understanding and Responding to the Needs of Newcomer Immigrant Youth and Families. Prev. Res. 14, 10–14. doi:10.1037/e717692007-003
Gelfand, M. J., and Kashima, Y. (2015). Editorial Overview: Culture: Advances in the Science of Culture and Psychology. Curr. Opin. Psychol. 8, iv–x. doi:10.1016/j.copsyc.2015.12.011
Gordon, G., and Breazeal, C. (2014). “Learning to Maintain Engagement: No One Leaves a Sad Dragonbot,” in 2014 AAAI Fall Symposium Series.
Gordon, G., Spaulding, S., Westlund, J. K., Lee, J. J., Plummer, L., Martinez, M., et al. (2016). “Affective Personalization of a Social Robot Tutor for Children’s Second Language Skills,” in Thirtieth AAAI Conference on Artificial Intelligence.
Hinkley, T., and McCann, J. R. (2018). Mothers' and Father's Perceptions of the Risks and Benefits of Screen Time and Physical Activity During Early Childhood: a Qualitative Study. BMC public health. 18, 1271. doi:10.1186/s12889-018-6199-6
Hussar, B., Zhang, J., Hein, S., Wang, K., Roberts, A., Cui, J., et al. (2020). The Condition of Education 2020 (NCES 2020-144). U.S. Department of Education. Natl. Cent. Education Stat. Washington, DC: National Center for Education Statistics. Available at: https://nces.ed.gov/pubsearch/pubsinfo.asp?pubid=2020144
Hyun, E.-J., Park, H.-K., Jang, S.-K., and Yeon, H.-M. (2010). The Usability of a Robot as an Educational Assistant in a Kindergarten and Young Children’s Perceptions of Their Relationship with the Robot. Korean J. Child Stud. 31, 267–282.
Kanda, T., and Ishiguro, H. (2005). Communication Robots for Elementary Schools. Proc. Aisb’05 Symp. Robot Companions: Hard Probl. Open Challenges Robot-Human Interaction. Brighton: The Society for the Study of Artificial Intelligence and the Simulation of Behaviou, 54–63.
Kennedy, J., Baxter, P., and Belpaeme, T. (2015). “The Robot Who Tried Too Hard: Social Behaviour of a Robot Tutor Can Negatively Affect Child Learning,” in 2015 10th ACM/IEEE International Conference on Human-Robot Interaction (HRI) (IEEE), 67–74.
Kory, J., and Breazeal, C. (2014). “Storytelling with Robots: Learning Companions for Preschool Children’s Language Development,” in The 23rd IEEE International Symposium on Robot and Human Interactive Communication (IEEE), 643–648. doi:10.1109/roman.2014.6926325
Kory, J. M., Jeong, S., and Breazeal, C. L. (2013). “Robotic Learning Companions for Early Language Development,” in Proceedings of the 15th ACM on International conference on multimodal interaction (ACM), 71–72. doi:10.1145/2522848.2531750
Kory Westlund, J., Gordon, G., Spaulding, S., Lee, J. J., Plummer, L., Martinez, M., et al. (2016). “Lessons from Teachers on Performing Hri Studies with Young Children in Schools,” in The Eleventh ACM/IEEE International Conference on Human Robot Interaction (IEEE Press), 383–390. doi:10.1109/hri.2016.7451776
Kory-Westlund, J. M., and Breazeal, C. (2019). “Assessing Children’s Perceptions and Acceptance of a Social Robot,” in Proceedings of the 18th ACM International Conference on Interaction Design and Children, 38–50. doi:10.1145/3311927.3323143
Lee, E., Lee, Y., Kye, B., and Ko, B. (2008). “Elementary and Middle School Teachers’, Students’ and Parents’ Perception of Robot-Aided Education in Korea,” in EdMedia+ Innovate Learning (Association for the Advancement of Computing in Education (AACE)), 175–183.
Lee, H. R., and Sabanović, S. (2014). “Culturally Variable Preferences for Robot Design and Use in south korea, turkey, and the united states,” in Proceedings of the 2014 ACM/IEEE international conference on Human-robot interaction (ACM), 17–24. doi:10.1145/2559636.2559676
Lee, S., Noh, H., Lee, J., Lee, K., Lee, G. G., Sagong, S., et al. (2011). On the Effectiveness of Robot-Assisted Language Learning. ReCALL. 23, 25–58. doi:10.1017/s0958344010000273
Leyzberg, D., Spaulding, S., and Scassellati, B. (2014). “Personalizing Robot Tutors to Individuals’ Learning Differences,” in Proceedings of the 2014 ACM/IEEE international conference on Human-robot interaction (ACM), 423–430. doi:10.1145/2559636.2559671
Leyzberg, D., Spaulding, S., Toneva, M., and Scassellati, B. (2012). The Physical Presence of a Robot Tutor Increases Cognitive Learning Gains. Proc. Annu. Meet. Cogn. Sci. Soc. 34.
Lin, C. H., Liu, E. Z. F., and Huang, Y. Y. (2012). Exploring Parents' Perceptions Towards Educational Robots: Gender and Socio-Economic Differences. Br. J. Educ. Technology. 43, E31–E34. doi:10.1111/j.1467-8535.2011.01258.x
Lin, Y.-C., Liu, T.-C., Chang, M., and Yeh, S.-P. (2009). Exploring Children's Perceptions of the Robots. Int. Conf. Tech. E-Learning Digital Entertainment., 512–517. doi:10.1007/978-3-642-03364-3_63
[Dataset] Louie, B. (2018). Supporting the Language Development Needs of English Language Learners. Seattle, WA: Presentation at the UW CSE MSR Summer Institute.
Mack, N. A., Rembert, D. G. M., Cummings, R., and Gilbert, J. E. (2019). “Co-Designing an Intelligent Conversational History Tutor with Children,” in Proceedings of the 18th ACM International Conference on Interaction Design and Children, 482–487. doi:10.1145/3311927.3325336
[Dataset] Martin, M. (2018). Computer and Internet Use in the united states, 2018 . Available at: https://www.census.gov/library/publications/2021/acs/acs-49.html (Accessed 01 05, 2021).
McFarland, J., Hussar, B., de Brey, C., Snyder, T., Wang, X., Wilkinson-Flicker, S., et al. (2017). The Condition of Education 2017 (NCES 2017- 144). U.S. Department of Education. Washington, DC: National Center for Education Statistics. Available at: https://nces.ed.gov/pubsearch/pubsinfo.asp?pubid=2017144
Meltzer, J., and Hamann, E. (2004). Meeting the Needs of Adolescent English Language Learners for Literacy Development and Content Area Learning, Part 1: Focus on Motivation and Engagement. Providence, RI: The Education Alliance at Brown University.
Mohr, K. A. J., and Mohr, E. S. (2007). Extending English-Language Learners' Classroom Interactions Using the Response Protocol. Reading Teach. 60, 440–450. doi:10.1598/rt.60.5.4
Moriguchi, Y., Kanda, T., Ishiguro, H., Shimada, Y., and Itakura, S. (2011). Can Young Children Learn Words from a Robot? Is. 12, 107–118. doi:10.1075/is.12.1.04mor
Mubin, O., Stevens, C. J., Shahid, S., Al Mahmud, A., and Dong, J.-J. (2013). A Review of the Applicability of Robots in Education. J. Technology Education Learn. 1, 13. doi:10.2316/journal.209.2013.1.209-0015
Nomura, T., Kanda, T., Kidokoro, H., Suehiro, Y., and Yamada, S. (2016). Why Do Children Abuse Robots? Is. 17, 347–369. doi:10.1075/is.17.3.02nom
Nomura, T., Suzuki, T., Kanda, T., Han, J., Shin, N., Burke, J., et al. (2008). What People Assume about Humanoid and Animal-type Robots: Cross-Cultural Analysis between japan, Korea, and the united states. Int. J. Hum. Robot. 05, 25–46. doi:10.1142/s0219843608001297
Page, D. (2017a). Conceptualising the Surveillance of Teachers. Br. J. Sociol. Education. 38, 991–1006. doi:10.1080/01425692.2016.1218752
Page, D. (2017b). The Surveillance of Teachers and the Simulation of Teaching. J. Education Pol. 32, 1–13. doi:10.1080/02680939.2016.1209566
Park, H. W., Rosenberg-Kima, R., Rosenberg, M., Gordon, G., and Breazeal, C. (2017). “Growing Growth Mindset With a Social Robot Peer,” in Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (Vienna, Italy: ACM), 137–145. doi:10.1145/2909824.3020213
Putnam, C., Rose, E., Johnson, E. J., and Kolko, B. (2009). Adapting User-Centered Design Methods to Design for Diverse Populations. Inf. Tech. Int. Development. 5.
Quintero, D., and Hansen, M. (2017). English Learners and the Growing Need for Qualified Teachers. Brown Cent. Chalkboard (Blog).
Randall, N. (2019). A Survey of Robot-Assisted Language Learning (Rall). ACM Trans. Human-Robot Interaction (Thri). 9, 1–36. doi:10.1145/3375991
Riek, L. D., Rabinowitch, T.-C., Chakrabarti, B., and Robinson, P. (2009). “Empathizing with Robots: Fellow Feeling along the Anthropomorphic Spectrum,” in Affective Computing and Intelligent Interaction and Workshops, 2009. ACII 2009. 3rd International Conference on (IEEE), 1–6. doi:10.1109/acii.2009.5349423
Rose, E. J., and Björling, E. A. (2017). “Designing for Engagement: Using Participatory Design to Develop a Social Robot to Measure Teen Stress,” in Proceedings of the 35th ACM International Conference on the Design of Communication (ACM).
Scassellati, B., Admoni, H., and Matarić, M. (2012). Robots for Use in Autism Research. Annu. Rev. Biomed. Eng. 14, 275–294. doi:10.1146/annurev-bioeng-071811-150036
Serholt, S., Barendregt, W., Leite, I., Hastie, H., Jones, A., Paiva, A., et al. (2014). “Teachers’ Views on the Use of Empathic Robotic Tutors in the Classroom,” in Robot and Human Interactive Communication, 2014 RO-MAN: The 23rd IEEE International Symposium on (IEEE), 955–960. doi:10.1109/roman.2014.6926376
Serholt, S., Barendregt, W., Vasalou, A., Alves-Oliveira, P., Jones, A., Petisca, S., et al. (2017). The Case of Classroom Robots: Teachers' Deliberations on the Ethical Tensions. AI Soc. 32, 613–631. doi:10.1007/s00146-016-0667-2
Seyama, J. i., and Nagayama, R. S. (2007). The Uncanny valley: Effect of Realism on the Impression of Artificial Human Faces. Presence: Teleoperators and virtual environments. 16, 337–351. doi:10.1162/pres.16.4.337
Sharifi, F., and Farrokh, P. (2019). Social-personalized versus Computer-Personalized Methods to Teaching English Learners’ reading Comprehension Ability. Multidisciplinary J. Educ. Res. 7, 287–315. doi:10.17583/remie.2017.2775
Shidujaman, M., and Mi, H. (2018). “"Which Country Are You from?" A Cross-Cultural Study on Greeting Interaction Design for Social Robots,” in International Conference on Cross-Cultural Design (Springer), 362–374. doi:10.1007/978-3-319-92141-9_28
Short, E., Swift-Spong, K., Greczek, J., Ramachandran, A., Litoiu, A., Grigore, E. C., et al. (2014). “How to Train Your Dragonbot: Socially Assistive Robots for Teaching Children about Nutrition through Play,” in The 23rd IEEE international symposium on robot and human interactive communication (IEEE), 924–929. doi:10.1109/roman.2014.6926371
Strait, M. K., Floerke, V. A., Ju, W., Maddox, K., Remedios, J. D., Jung, M. F., et al. (2017). Understanding the Uncanny: Both Atypical Features and Category Ambiguity Provoke Aversion toward Humanlike Robots. Front. Psychol. 8, 1366. doi:10.3389/fpsyg.2017.01366
Suárez-Orozco, C., Abo-Zena, M. M., and Marks, A. K. (2015). Transitions: The Development of Children of Immigrants. NYU Press.
Suguitan, M., and Hoffman, G. (2018). “Blossom: A Tensile Social Robot Design with a Handcrafted Shell,” in Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (ACM), 383.
Sun, H. (2012). Cross-cultural Technology Design: Creating Culture-Sensitive Technology for Local Users (OUP USA).
Tapus, A., Maja, M., and Scassellatti, B. (2007). The Grand Challenges in Socially Assistive Robotics. IEEE Robotics Automation Mag. 14, N–A. doi:10.1109/mra.2007.339605
Toet, A., and van Erp, J. B. (2019). The Emojigrid as a Tool to Assess Experienced and Perceived Emotions. Psych. 1, 469–481. doi:10.3390/psych1010036
Toh, E., Poh, L., Causo, A., Tzuo, P.-W., Chen, I., Yeo, S. H., et al. (2016). A Review on the Use of Robots in Education and Young Children. J. Educ. Technology Soc. 19.
Tracy, K., and Robles, J. S. (2013). Everyday Talk: Building and Reflecting Identities. Guilford Press.
Trovato, G., Kishi, T., Endo, N., Hashimoto, K., and Takanishi, A. (2012). “A Cross-Cultural Study on Generation of Culture Dependent Facial Expressions of Humanoid Social Robot,” in International Conference on Social Robotics (Springer), 35–44. doi:10.1007/978-3-642-34103-8_4
Uro, G., Lai, D., and Alsace, T. (2020). Supporting English Learners in the Covid-19 Crisis. Council of the Great City Schools.
Vacca, R. (2019). “Brokering Data: Co-designing Technology With Latina Teens to Support Communication With Parents: Leveraging Cultural Practices of Latinx Youth through Co-design,” in Proceedings of the 18th ACM International Conference on Interaction Design and Children, 197–207.
van den Berghe, R., Verhagen, J., Oudgenoeg-Paz, O., van der Ven, S., and Leseman, P. (2019). Social Robots for Language Learning: A Review. Rev. Educ. Res. 89, 259–295. doi:10.3102/0034654318821286
Vogt, P., De Haas, M., De Jong, C., Baxter, P., and Krahmer, E. (2017). Child-robot Interactions for Second Language Tutoring to Preschool Children. Front. Hum. Neurosci. 11, 73. doi:10.3389/fnhum.2017.00073
Walqui, A., and Bunch, G. C. (2019). Amplifying the Curriculum: Designing Quality Learning Opportunities for English Learners. Teachers College Press.
Westlund, J. K., Breazeal, C., and Story, A. (2015). “Deception, Secrets, Children, and Robots: What’s Acceptable,” in Workshop on The Emerging Policy and Ethics of Human-Robot Interaction, held in conjunction with the 10th ACM/IEEE International Conference on Human-Robot Interaction Portland, OR.
Westlund, J. K. (2015). Telling Stories with green the Dragonbot: A Showcase of Children’s Interactions over Two Months. HRI (Extended Abstracts). Portland, OR: HRI'15 Workshops, 263.
Woods, S. (2006). Exploring the Design Space of Robots: Children's Perspectives. Interacting Comput. 18, 1390–1418. doi:10.1016/j.intcom.2006.05.001
Keywords: English language learners, social robots, cultural responsiveness, elementary education, educational robots
Citation: Louie B, Björling EA and Kuo AC (2021) The Desire for Social Robots to Support English Language Learners: Exploring Robot Perceptions of Teachers, Parents, and Students. Front. Educ. 6:566909. doi: 10.3389/feduc.2021.566909
Received: 29 May 2020; Accepted: 30 July 2021;
Published: 20 August 2021.
Edited by:
Eileen Scanlon, The Open University, United KingdomReviewed by:
Yangyu Xiao, The Chinese University of Hong Kong, ChinaCopyright © 2021 Louie, Björling and Kuo. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Elin A. Björling, YmpvcmxpbmdAdXcuZWR1
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.