
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Built Environ., 23 September 2022
Sec. Structural Sensing, Control and Asset Management
Volume 8 - 2022 | https://doi.org/10.3389/fbuil.2022.1007886
This article is part of the Research TopicArtificial Intelligence for the Built EnvironmentView all 4 articles
 Tarutal Ghosh Mondal
Tarutal Ghosh Mondal Genda Chen*
Genda Chen*Over the past 2 decades, the use of artificial intelligence (AI) has exponentially increased toward complete automation of structural inspection and assessment tasks. This trend will continue to rise in image processing as unmanned aerial systems (UAS) and the internet of things (IoT) markets are expected to expand at a compound annual growth rate of 57.5% and 26%, respectively, from 2021 to 2028. This paper aims to catalog the milestone development work, summarize the current research trends, and envision a few future research directions in the innovative application of AI in civil infrastructure health monitoring. A blow-by-blow account of the major technology progression in this research field is provided in a chronological order. Detailed applications, key contributions, and performance measures of each milestone publication are presented. Representative technologies are detailed to demonstrate current research trends. A road map for future research is outlined to address contemporary issues such as explainable and physics-informed AI. This paper will provide readers with a lucid memoir of the historical progress, a good sense of the current trends, and a clear vision for future research.
Civil infrastructure is one of the main engines that drive economic growth and ensure a high standard of living in any country. Therefore, it is of paramount importance to ensure that the country’s critical infrastructure systems are in sound condition to support vital economic activities and to preempt any sudden infrastructure failure that may engender catastrophic consequences. This makes it essential to continuously monitor the integrity of infrastructure so that any structural deficiency caused by environmental or loading conditions can be detected early and necessary follow-up measures can be taken promptly, significantly reducing the repair and rehabilitation costs. Recent advancements in sensor technologies have led to many low-cost but efficient solutions for procuring long-term monitoring data from instrumented structural systems. The collected field data should be subsequently converted to meaningful physical indicators to assess the in-service infrastructure condition and enable informed retrofit decision-making. However, the real-time data generated by such automated systems are beyond the scope of manual excavation due to the enormity of the collected data and the complexity of the information retrieval process.
With the advancements in information technologies and computing hardware, recent years have seen the emergence of a new computational method called artificial intelligence (AI), which seeks to simulate human cognition capability and confer human-like intelligence to machines and computers. Over the past 2 decades, this discipline has gained significant attention from the structural health monitoring (SHM) community and has gone a long way to raise the level of intelligent maintenance and condition assessment of civil infrastructures through autonomous, accurate, and robust processing of the field monitoring data. A plethora of studies came into existence that consistently pushed the envelope targeting the complete automation of the future inspection process. On the whole, the strides made so far have been remarkable, as documented by many review papers published on this topic (Toh and Park, 2020; Sun et al., 2020; Bao and Li, 2021; Flah et al., 2021; Salehi and Burgueño, 2018; Azimi et al., 2020; Smarsly and Hartmann, 2007; Doa’ei and Jahan, 2018; Ye et al., 2019; Sony et al., 2021).
The global market size for digital technologies in this industry 4.0 era will boost the wide use of AI in big data analytics, such as image processing. For example, the SHM market was estimated to value at $1,814 million in 2021 and reach $3,955 million by 2028, thus registering a compound annual growth rate (CAGR) of 15.3% (Vantage-Market-Research, 2022). The commercial drone market size was valued at $13.44 billion in 2020 and expected to expand at a CAGR of 57.5% from 2021 to 2028 (Grand-View-Research, 2022a). The internet of things market was estimated to value at $31.99 billion in 2020 and expand at a CAGR of 26.0% from 2021 to 2028 (Grand-View-Research, 2022b).
In recent years, an influx of new researchers has been encouraged by the promising opportunities that this discipline of smart autonomous SHM offers. However, the enormity of the available literature is sometimes baffling, and as a result, the new researchers often rely on the recently published review papers to be acquainted with the contemporary research trends and identify the major research challenges that are yet to be addressed. However, the existing review papers in this area were largely focused on specific topics and therefore did not provide a complete picture of the holistic development of this field. Moreover, there is a lack of clarity about the historical perspective of how painstaking works by various researchers expanded the knowledge base consistently over so many years. This study aims at filling this information gap by providing a detailed account of how this research field progressed over time with the help of some selected milestone papers having significant contributions in terms of new machine learning (ML) or deep learning (DL) approaches, intelligent modifications in the existing architectures or modeling strategies leading to substantial performance improvement as well as unique and innovative applications in SHM. To take one example, Karim et al. (2022) proposed a semi-supervised assistive intelligence technique that requires a limited number of frames in an inspection video to be manually annotated for the training of a deep learning-based structural element segmentation algorithm (Figure 1). It begins with a small set of human-labeled data and subsequently invokes temporal coherence analysis to identify the false negatives that spotlight the weaknesses in the neural network. This enables iterative improvement of the learning algorithm leveraging the domain knowledge of experienced bridge professionals. The proposed framework significantly reduced the extent of manual data annotation, which is prohibitively time-consuming, labor-intensive, and expensive, and at the same time achieved a high degree of accuracy. This review paper is intended to serve as a time capsule that chronicles the evolution of scientific research in this area through a number of such seminal studies. It is believed that this paper will help the readers easily grasp the chronology of scientific advancements made thus far and identify the key challenges that still linger and create a roadblock to further progress in this area.
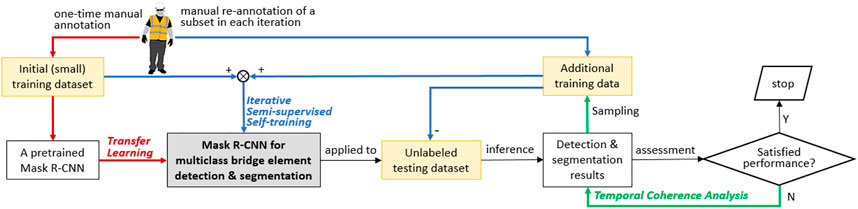
FIGURE 1. Overview of the semi-supervised assistive intelligence method proposed by Karim et al. (2022).
The remaining of this paper is arranged in this following manner. Section 2 focused on the application of AI in various vision-based and vibration-based SHM techniques. Section 3 provides a synopsis of various AI-based approaches applied to condition assessment of concrete structures. Section 4 deals with the trends in current research in this area. A road map for future research is laid down in Section 5. Finally, concluding remarks are provided in Section 6.
In recent times, the immediate availability of inexpensive vision sensors has led to a deluge of studies focusing on vision-based techniques for SHM. These sensors are also suitable for integrating with mobile robotic platforms such as UAS, which simplifies the data collection process significantly, giving rise to a large volume of data in a short time. However, accurate and quick analysis of such voluminous data sets presents a serious challenge, prompting the researchers to look for AI-based solutions to automate the data processing task.
Vision-based condition assessment of structural systems can be accomplished at three levels (Figure 2), namely defect classification (Table 1), defect detection (Table 2), and defect segmentation (Table 3). Defect classification entails recognizing the category of defect depicted by an inspection image. However, it does not reveal anything about the location of the defect in the image. On the other hand, defect detection involves simultaneous classification and localization of the defects present in an input image. This class of algorithms can deal with situations where a single image may contain multiple defects belonging to the same or different categories. However, at this level, the defective regions in an image are generally demarcated by rectangular bounding boxes, which do not trace the defect boundaries accurately and therefore are not very useful for defect quantification. A finer level of localization is afforded by defect segmentation, where each pixel in an image is classified based on the type or severity of the defect. This task can outline the defect boundary more accurately, paving the way for defect quantification, which is of the highest interest to the inspectors and structural engineers.
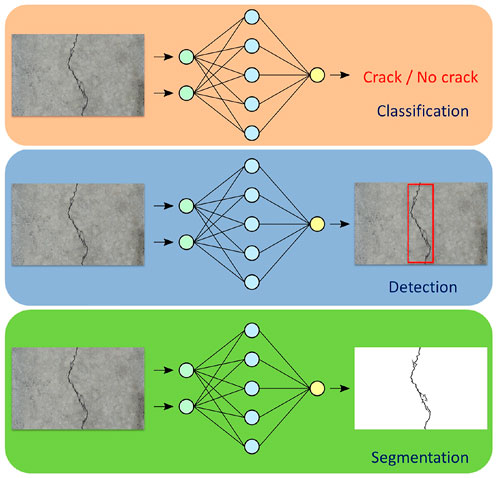
FIGURE 2. Three levels of vision-based inspection.
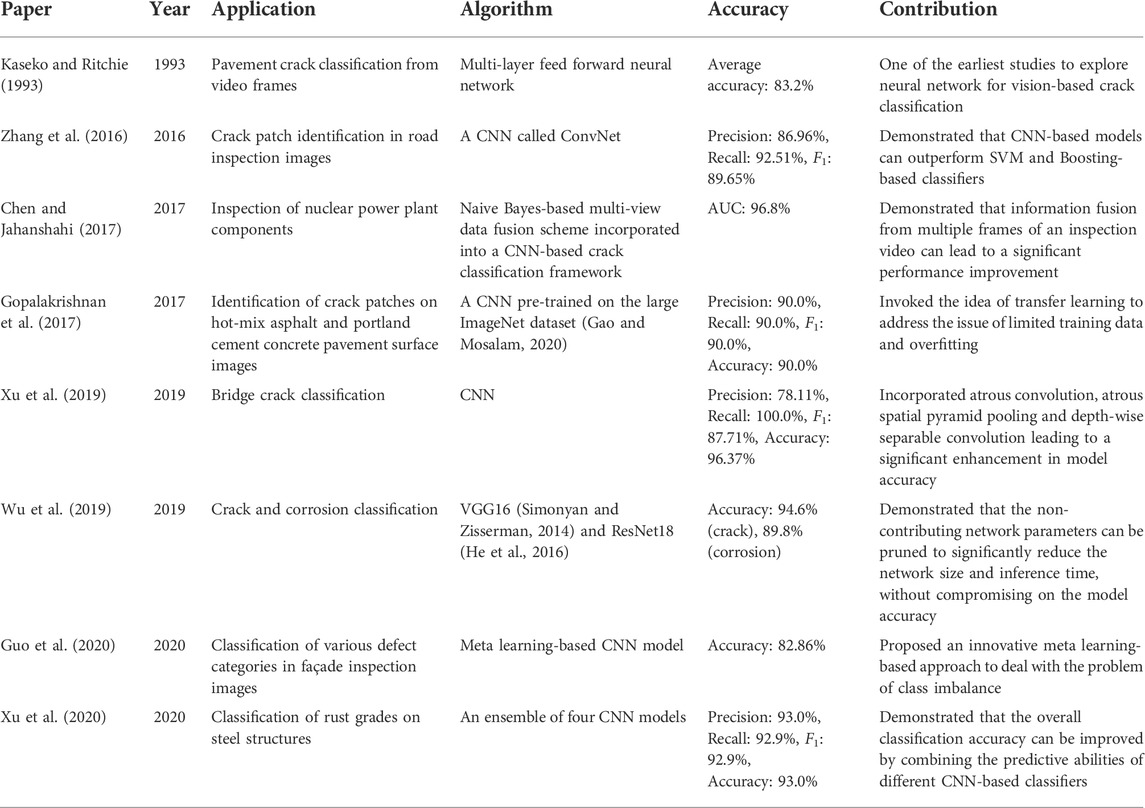
TABLE 1. Milestone papers focused on AI techniques for vision-based defect classification. Precision is the ratio of true positive to the sum total of true positive and false positive. On the other hand, recall is given by the ratio of true positive to the sum total of true positive and false negative. Whereas, F1 score is the harmonic mean of precision and recall. AUC is the area under the Receiver Operating Characteristic (ROC) curve.
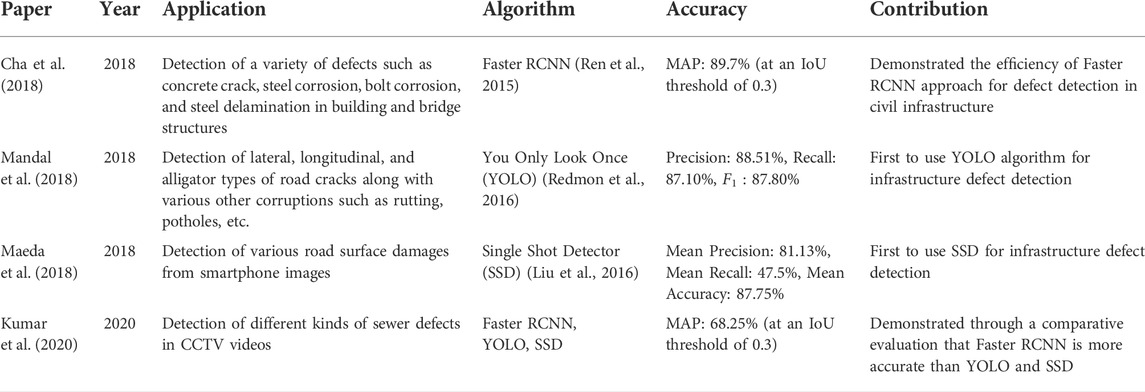
TABLE 2. Milestone papers focused on AI techniques for vision-based defect detection. MAP denotes the mean average precision. IoU represents the intersection over the union of the predicted and ground-truth defect regions.
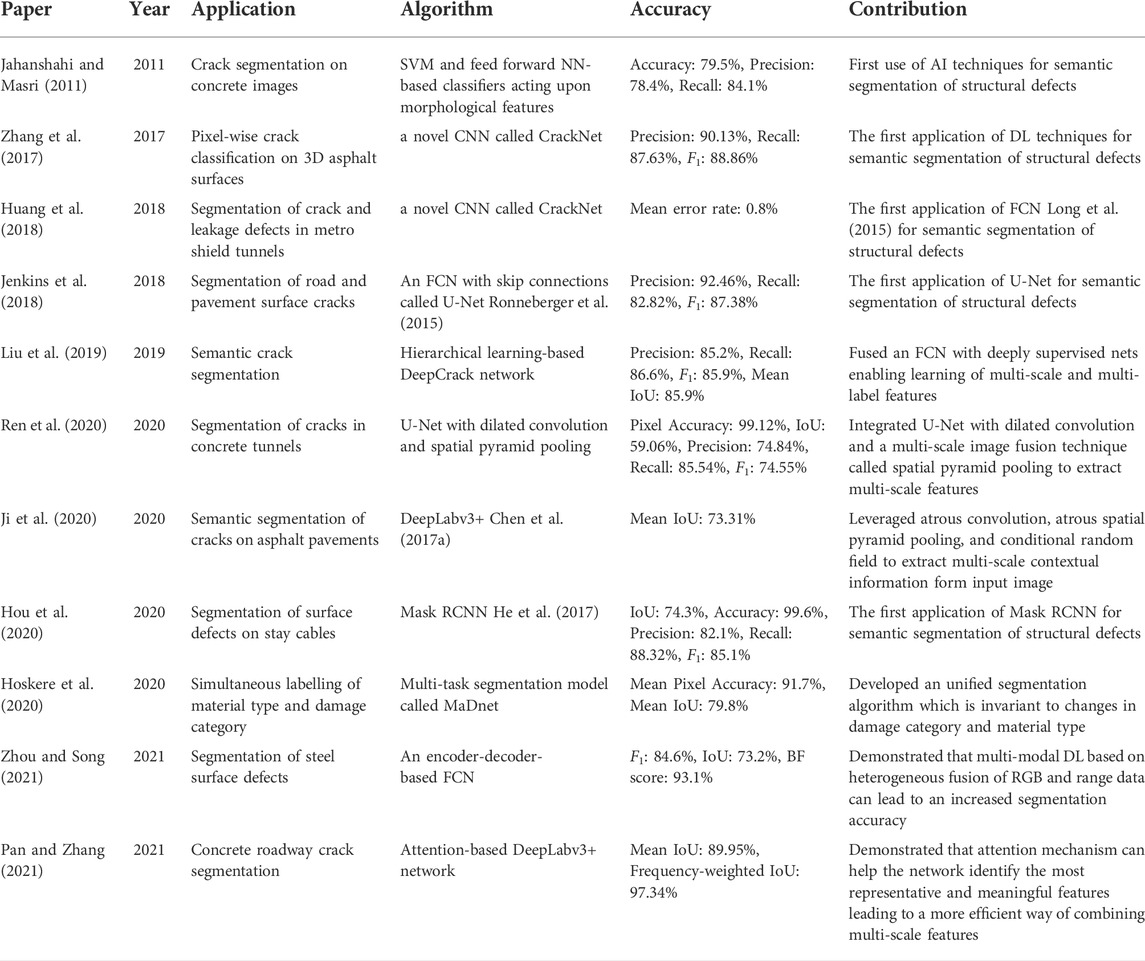
TABLE 3. Milestone papers focused on AI techniques for vision-based defect segmentation. BF score is a short from of boundary F1 score.
The first batch of AI algorithms that came into existence towards the end of the previous century were essentially based on traditional ML techniques, where appropriate damage-sensitive features are first identified by human experts (Figure 3). This is followed by extraction of the selected hand-crafted features from the input image and categorization with the help of a suitable classifier. Kaseko and Ritchie (1993) were among the first generation of researchers who explored neural network-based techniques for pavement crack classification from video frames. The authors first employed a threshold-based technique to segment a digital pavement image into a binary mask representing crack pixels and background. The cut-off grayscale value used for binarization was determined by a multi-layer feed-forward neural network-based regression technique based on the parameters characterizing the gray-level histogram of the image. The binary crack mask was fragmented into smaller tiles which were then classified by another multi-layer feed-forward neural network based on various crack features into several crack categories such as no crack, transverse crack, longitudinal crack, diagonal crack, and hybrid crack. This work acquainted the SHM community with the potential of AI-based techniques vis-à-vis autonomous processing of visual inspection data, which led to a plethora of research in the following 2 decades aimed at automatizing the entire visual inspection pipeline. Liu et al. (2002) resorted to a support vector machine to identify cracks in tunnel inspection images. An initial crack map was first obtained by using intensity and gradient-based thresholding strategy. Following this, an SVM-based classifier was utilized to distinguish between crack, non-crack, and intermediate type patterns. Abdel-Qader et al. (2006) demonstrated the use of principal component analysis for crack identification on concrete bridge deck images. The input image was divided into several smaller blocks. Each block was convolved with various vertical, horizontal, and oblique edge detecting filters. The convolution outputs were combined and subjected to an averaging filter and normalized. A normalized test block as such was then classified based on the class of the training block at its closest proximity in the eigenspace spanned by the training data. Cord and Chambon (2012) relied on textural features to identify defects in a road image database. The authors exploited an AdaBoost classifier, an ensemble learning method that combines several weak classifiers to form a strong predictive model. Another ensemble learning technique that was put to use by the research community for automatic image-based crack classification was random forest which is founded on the principles of decision trees (Shi et al., 2016).
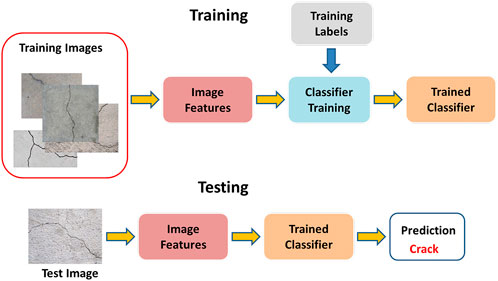
FIGURE 3. Training and testing protocol for tradition ML-based defect classifiers.
Notwithstanding that the initial attempts at AI-based damage classification were based primarily on ML approaches, recent advancements in the processing capabilities and availability of large volumes of data, however, have triggered extensive use of DL techniques for autonomous analysis of visual inspection data. Unlike the ML-based models, convolutional neural network (CNN)-based DL methods can automatically learn the damage-sensitive features in the input data and are, in general, more accurate (Figure 4). One of the first few studies in this direction can be attributed to Zhang et al. (2016), who proposed a novel CNN architecture called ConvNet for identifying crack patches in road inspection images. The authors demonstrated that CNN-based models can outperform SVM and Boosting-based (Freund et al., 1999) classifiers. This approach was later extended to crack identification on concrete surfaces by Cha et al. (2017). However, it was observed that crack classification based on a single view is prone to false detection due to the presence of crack-like non-crack patterns. Chen and Jahanshahi (2017) made a major breakthrough by demonstrating that information fusion from multiple frames of an inspection video captured by a mobile camera can lead to a significant performance improvement. The authors proposed a Naive Bayes-based multi-view data fusion scheme which was incorporated into a CNN-based crack classification framework enabling accurate and robust inspection of nuclear power plant components. One of the common issues that the scientific community faces in this area is the scarcity of labeled training data. Insufficient training data prohibits training of very deep CNNs and leads to overfitting that causes inadequate performance at test time. Gopalakrishnan et al. (2017) invoked the idea of transfer learning to address this issue of limited training data. It has been observed that the features extracted by the early convolutional layers are largely class-agnostic. So, the authors used a CNN pre-trained on the large ImageNet dataset (Gao and Mosalam, 2020) to initialize the parameters of a CNN for identifying crack patches on hot-mix asphalt and portland cement concrete pavement surface images leading to accurate predictions. Atha and Jahanshahi (2018) extended the application areas of CNN-based damage classifiers to patch-based corrosion classification in steel structures. Xu et al. (2019) proposed a novel CNN-based bridge crack classification framework incorporating atrous convolution, atrous spatial pyramid pooling, and depth-wise separable convolution. The atrous convolution can produce a larger receptive field without reducing the spatial resolution or increasing the kernel size. The atrous spatial pyramid pooling enables the extraction of multi-scale context information, which can account for various object scales and improve the accuracy. On the other hand, the depthwise separable convolution reduces the number of convolution parameters and hence the computational complexity. The proposed modifications led to a significant enhancement in the model accuracy. These damage classification models are intended to be eventually integrated with mobile robotic platforms such as unmanned aerial vehicles (UAVs) to automate the entire inspection pipeline. However, the UAVs typically have limited onboard computing capability and therefore cannot support real-time inference owing to the high computation costs associated with the state-of-the-art CNN models. Wu et al. (2019) demonstrated that the non-contributing network parameters can be pruned to significantly reduce the network size and inference time without compromising on the model accuracy. This enables the network run efficiently on power-efficient embedded AI computing devices such as Jetson TX2. The proposed network compression approach can be instrumental in realizing the vision for the future edge intelligence-based smart SHM systems. Several studies in recent years also looked into the classification of multiple damage categories. Perez et al. (2019) and Masrour et al. (2019) proposed CNN-based techniques for classifying building inspection images into several frequently observed defect categories. Class imbalance is a common menace encountered in many multi-class classification problems. This problem occurs when all damage categories are not evenly represented in the training data. Guo et al. (2020) proposed an innovative meta learning-based approach to deal with the problem of class imbalance while classifying various defect categories in façade inspection images. Previous experience in multi-class classification also suggests that a given CNN architecture may accurately classify certain defect categories but may prove inefficient in classifying other defect categories. This implies that the overall accuracy can be improved by combining the predictive abilities of different CNN-based classifiers. Xu et al. (2020) put this hypothesis to test by employing an ensemble of four different CNN architectures to classify rust grades on steel structures, obtaining an accuracy which is higher than any single classifier-based approach.
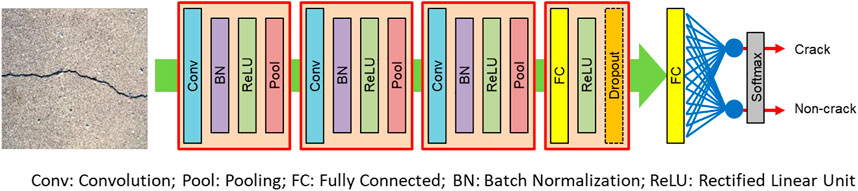
FIGURE 4. Typical CNN architecture for defect classification.
The detection task can be repurposed as patch-based classification, as demonstrated by many studies described in the previous subsection. An image can be divided into several overlapping or non-overlapping patches whose size is predefined. Then each patch is classified independently, resulting in a coarse localization of the defects. However, this process disregards the possible variability in the defect size. Moreover, given that the classifier is applied locally to the individual patches, the global context which is vital for accurate detection is overlooked. Alternatively, the detection task can be framed as a regression problem where the bounding box coordinates and the associated class probabilities can be regressed from an entire input image. One of the prominent examples of this modeling approach is Faster RCNN (Ren et al., 2015), where an input image is first processed by a series of convolutional layers (Figure 5). The feature map generated by the last convolutional layer is sent to a region proposal network to produce a number of interest regions. The interest regions are finally classified, and the corresponding bounding boxes are refined using a CNN module. Cha et al. (2018) demonstrated the efficiency of this approach through the detection of a variety of defects such as concrete crack, steel corrosion, bolt corrosion, and steel delamination in building and bridge structures. Cheng and Wang (2018) extended the use cases of this approach to crack detection in sewer pipes from closed-circuit television (CCTV) videos. Nie and Wang (2018) resorted to transfer learning to detect several types of pavement distresses from road inspection images leveraging a Faster RCNN-based approach. Ghosh Mondal et al. (2020) made use of this approach to autonomously detect several earthquake-induced damages in reinforced concrete buildings from visual reconnaissance data. The authors considered various damage categories such as cracks, spalling, exposed rebars, and severely buckled rebars, which are relevant for reinforced concrete buildings subjected to seismic vibrations. You Only Look Once (YOLO) (Redmon et al., 2016) is another modeling approach that was frequently used in the previous studies. It represents a family of single-stage detection algorithms that processes an entire input image in one pass. In this approach, an image is divided into several grids. A set of bounding boxes, corresponding confidence scores, and class probabilities are regressed at each grid location. A variant of this algorithm was first put to use by Mandal et al. (2018) for the detection of lateral, longitudinal, and alligator types of road cracks along with various other corruptions such as rutting, potholes, etc. This approach was extended by Deng et al. (2021) to the detection of cracks in concrete bridges. A third detection approach, namely single shot detector (SSD) (Liu et al., 2016) was leveraged by Maeda et al. (2018) for the detection of various road surface damages from smartphone images. This modeling approach inherits the philosophy of YOLO. However, SSD is distinct from YOLO because it is capable of drawing multi-scale features from different convolutional layers and fusing them to produce more robust detection. Kumar et al. (2020) compared the efficiency of the three modeling approaches vis-à-vis detection of different kinds of sewer defects in CCTV videos. The authors concluded that the Faster RCNN algorithm is more accurate than the other two detection approaches.
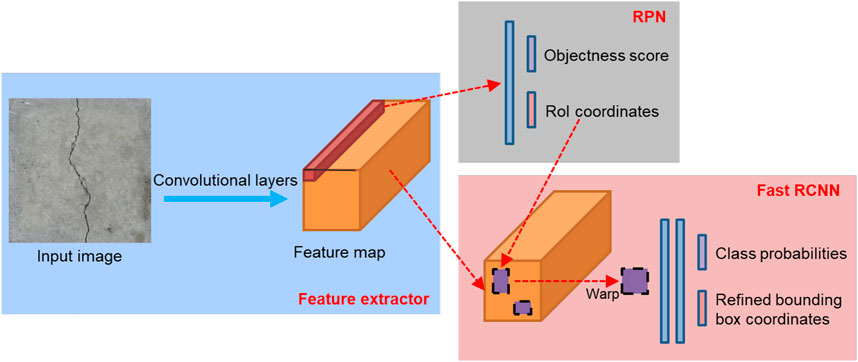
FIGURE 5. Faster RCNN architecture for defect detection.
The use of AI techniques for semantic segmentation of defects was first noted in 2011 when Jahanshahi and Masri (2011) employed a morphological method to generate crack maps from concrete images and distinguished the crack pixels from non-crack artifacts by categorizing the segmented objects based on their shapes and sizes with the help of SVM and feed-forward NN-based classifiers. A year later, Chen et al. (2012) used an SVM-based classifier for rust assessment in steel bridge images. Each pixel was classified as rust or background based on the associated color information. Prasanna et al. (2014) presented a novel approach for crack detection on concrete bridges. The authors first identified a number of line segments in each image by leveraging a RANdom SAmple Consensus (RANSAC)-based (Fischler and Bolles, 1981) fitting algorithm. Following this, several intensity-based, gradient-based, and Laplacian pyramid-based scale-space features were extracted from the fitted line segments and were used as inputs to an SVM classifier to distinguish between cracks and non-crack patterns.
However, the recent works on semantic segmentation of defects are based largely on DL-based techniques. The first application of this solution approach was witnessed in 2017 when Zhang et al. (2017) proposed a novel CNN called CrackNet for pixel-wise crack classification on 3D asphalt surfaces. However, fully convolutional networks (Long et al., 2015) which comprise an encoder and a decoder, formed the basis of the majority of studies focusing on DL-based defect segmentation. The encoder generally consists of a bunch of convolutional layers intended to extract meaningful features from the input image (Figure 6). On the other hand, the decoder exploits transposed convolutions to upsample the downsized features to the original input resolution. The output layer contains the class probabilities for each pixel and affords a one-to-one correspondence with the input image. The efficiency of this approach was first demonstrated by Huang et al. (2018) who leveraged this approach for segmentation of crack and leakage defects in metro shield tunnels. A number of studies also relied on U-Net, which is a fully convolutional network with skip connections (Ronneberger et al., 2015). Jenkins et al. (2018) was among the first to employ this network for segmentation of road and pavement surface cracks. One of the key challenges in this area is that the defects exhibit wide-scale variations in images acquired during an inspection. To address this challenge, Liu et al. (2019) proposed a hierarchical learning-based DeepCrack network by fusing a fully convolutional network with deeply supervised nets for semantic crack segmentation. After each convolutional layer, the authors appended a side output layer where direct supervision was applied. The outputs from all the side output layers are concatenated to produce the final semantic labels. This enabled learning of multi-scale and multi-label features leading to state-of-the-art performance. To extract multi-scale features, Ren et al. (2020) integrated U-Net with dilated convolution and a multi-scale image fusion technique called spatial pyramid pooling for automatic segmentation of cracks in concrete tunnels. Dilated convolution is also known as atrous convolution, which expands the receptive field of a kernel without increasing the computational complexity by inserting holes between consecutive kernel elements, facilitating multi-scale context aggregation (Chen et al., 2017b). Ji et al. (2020) exploited DeepLabv3+ for semantic segmentation of cracks on asphalt pavements. It is based on DeepLab architecture (Chen et al., 2017a) which leverages atrous convolution, atrous spatial pyramid pooling, and conditional random field to extract multi-scale contextual information from the input image leading to improved segmentation accuracy. Hou et al. (2020) invoked Mask RCNN for segmenting surface defects on stay cables. Mask RCNN is an extension of Faster RCNN containing an additional branch for predicting high-quality semantic mask for each instance in the scene (He et al., 2017). The inspection process often involves probing a wide variety of construction materials such as steel, concrete, and asphalt to identify defects like cracks, exposed rebars, spalling, corrosion, etc. Developing a unified segmentation algorithm that is invariant to changes in damage category and material type is a challenging task. Hoskere et al. (2020) addressed this problem by proposing a multi-task segmentation model called MaDnet for simultaneous labeling of material type and damage category. The proposed network had a shared encoder but separate decoders for the material and damage segmentation tasks. Traditional RGB cameras project a 3D scene on a 2D plane. This transformation often leads to a loss of information about the actual scale of objects. To address this shortcoming of the RGB cameras, several researchers explored various range finders such as Lidars, which measure the distance of different points in the scene from the camera. To facilitate autonomous processing of range data, Zhou and Song (2020) proposed an encoder-decoder-based approach for concrete roadway crack segmentation from range images collected by a 3D camera mounted at the back of a moving vehicle. The authors later extended this study by stacking intensity and raw images to serve as a multi-channel input to the CNN and demonstrated that the proposed heterogeneous data fusion leads to an increase in the segmentation accuracy and robustness (Zhou and Song, 2021). Pan and Zhang (2021) proposed an attention-based DeepLabv3+ network for automatic segmentation of steel surface defects. Attention is a powerful concept in DL that mimics cognitive attention. The authors demonstrated that the attention mechanism can help the network identify the most representative and meaningful features leading to a more efficient way of combining multi-scale features, which eventually improves the segmentation performance.
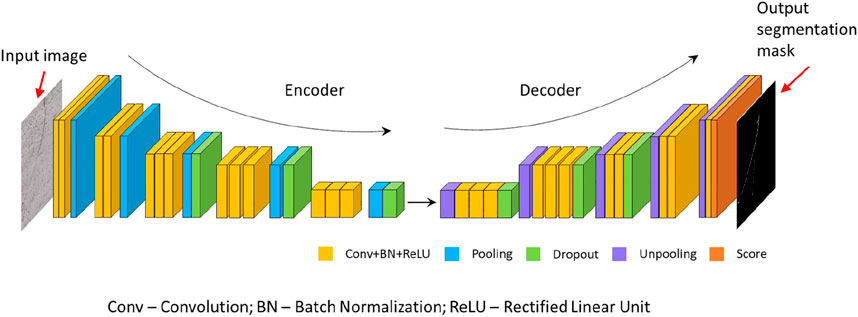
FIGURE 6. Typical encoder-decoder-based fully convolutional network architecture for defect segmentation.
The vibration characteristics often provide informative cues about the integrity of a structure. Any significant deviation from the usual vibration pattern indicates a plausible deterioration in the structural condition. The use of ML-based techniques in this area is more than 2 decades old (Table 4). Feng and Bahng (1999) were perhaps the first researchers to use the back-propagation neural network in 1999 to estimate the damage-induced stiffness reduction based on the modal properties extracted from the vibration response of jacketed reinforced concrete columns subjected to cyclic loading. Five years later, Golinval et al. (2004) demonstrated that a structural damage can be detected by computing the subspace spanned by the vibration response data leveraging principal component analysis. Any change in the subspace orientation vis-à-vis the healthy state suggests a possible damage to the structure. The authors illustrated this method by detecting the emergence of a crack leading to the failure of a test specimen subjected to fatigue vibration testing. (Jiang et al., 2006; Jiang et al., 2011) presented a comprehensive framework for structural damage detection based on multi-sensor data fusion and a probabilistic neural network. In a probabilistic neural network, the probability distribution function of each class is approximated by a non-parametric function (Specht, 1990). Following this, the class probabilities for a new input are estimated using the Bayesian decision rule, and the class with the highest posterior probability is assigned to that input. The proposed PNN was shown to be robust against measurement noise. It was further demonstrated that the fusion of classifiers operating on multiple sensors leads to increased accuracy and reliability of damage detection. The proposed conceptual framework was validated by classifying various damage patterns in a 4-story benchmark framed structure and a seven-story shear-beam building model from simulated vibration responses. Osornio-Rios et al. (2012) blazed a new trail by using an artificial neural network to simultaneously detect, localize, and quantify a variety of defects in truss structures, including cracks and corrosion. This was achieved by providing each task with dedicated output nodes. The input to the ANN comprised amplitude of the natural frequencies of vibration acquired through accelerometers mounted on different parts of the structure. In the same year, Goh et al. (2013) broke another fresh ground by demonstrating that ANN can be used to predict unmeasured mode shapes from a limited number of measured data. In the case of mode shape-based damage detection models, the prediction accuracy depends greatly on the number of measurement points. However, instrumenting a structure at numerous locations is not an economical solution. This study showed that an ANN can be leveraged to predict the mode shapes at unmeasured points from a handful of measured mode shape data. The estimated mode shape data can then be combined with the measured data to be used as input to another ANN to predict the stiffness reduction factor, which is an indicator of damage severity. This ideation was validated on finite element simulation data of a two-span concrete slab. Diez et al. (2016) resorted to a clustering-based unsupervised approach for health monitoring of the Sydney Harbour Bridge in Australia. Tri-axial accelerometers were installed at various joints on the bridge to measure vehicle-induced vibrations. Joints with similar vibration patterns were grouped together by means of the k-means clustering technique, leading to the identification of damaged joints and faulty sensors. Meruane (2016) employed an extreme learning machine for vibration-based damage assessment from transmissible data. Extreme learning machines are feed-forward neural networks where hidden layer learning parameters are randomly initialized and never updated. The output layer weights are computed analytically, exploiting a straightforward generalized inverse method. This obsoletes the need for iterative finetuning as entailed in gradient-based back-propagation techniques, resulting in a much quicker training scheme. Huang et al. (2006) claimed that extreme learning machines afford better generalization ability than back-propagation neural networks. In this study Meruane (2016), an extreme learning machine is used to estimate damage-induced stiffness reduction based on antiresonant frequencies evaluated from transmissibility measurements. Case studies of an eight-degree-of-freedom mass-spring system and a beam under multiple damage scenarios are considered to demonstrate the feasibility of this approach.
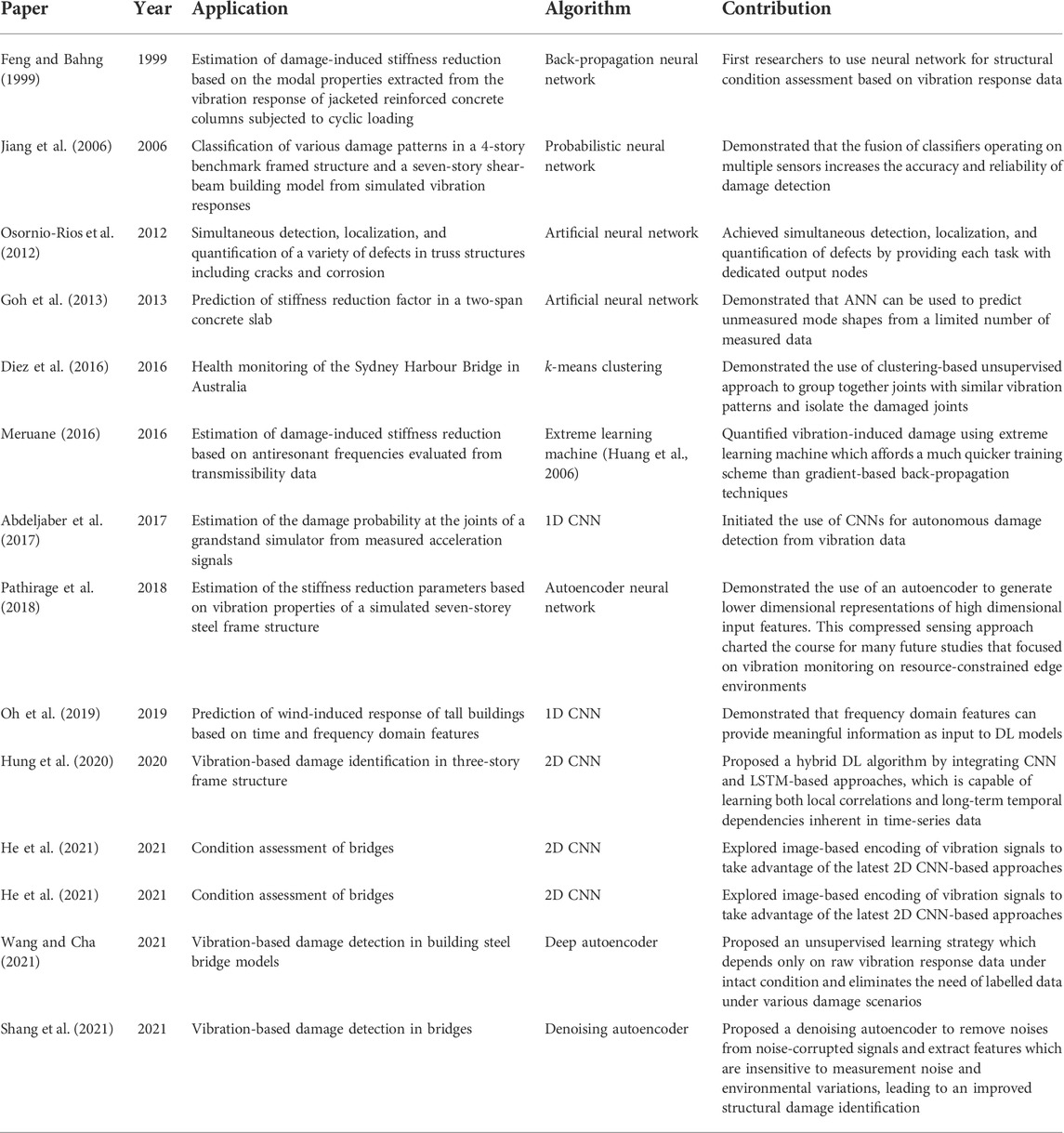
TABLE 4. Milestone papers focused on AI techniques for vibration-based SHM.
In recent years, rapid improvement in computation capabilities motivated the research community to explore CNN-based DL approaches for autonomous damage detection from vibration data (Figure 7). CNNs can automatically search for optimal damage-sensitive features, obliterating the need for manual feature selection. Abdeljaber et al. (2017) can be credited for initiating the use of CNNs in this area. The authors proposed a 1D CNN for estimating the damage probability at the joints of a grandstand simulator from measured acceleration signals. Pathirage et al. (2018) turned to an autoencoder neural network for structural damage identification based on vibration properties such as natural frequencies and mode shapes. An autoencoder is first used to generate lower-dimensional representations of high-dimensional input features, which were subsequently processed by another piece of neural network to estimate the stiffness reduction parameters. This compressed sensing technique charted the course for many future studies focused on vibration monitoring in resource-constrained edge environments. The proposed algorithm was validated through finite element simulation of a seven-story steel frame structure. Oh et al. (2019) presented a CNN-based approach to predict the wind-induced response of tall buildings. The input to the network comprised time history and frequency response of top floor displacement, and frequency response of wind speed. The predicted parameters were the maximum values of tensile and compressive strains in selected building columns which indicate the stress level in the columns. This paper can also be recognized as one of the early few studies which demonstrated that frequency domain features can also provide meaningful information as input to DL models. This major finding created important footsteps for future studies to follow. Despite the proven capabilities of 1D CNN, it is not disputed that the recent boom in DL techniques is fueled mainly by 2D CNN, which has achieved great success in image recognition tasks by automatically learning discriminative features from the raw data. This motivated the scientific community to explore various ways to encode time series data as images in order to take advantage of the latest 2D CNN-based approaches. He et al. (2021) were one of the pioneers who exploited this idea for the condition assessment of bridges. The authors imaged the vibration response of a bridge using a recurrence plot, which is a two-dimensional representation that reveals distance correlations in a time-series signal. The resulting images were input into a 2D CNN to determine the damage location and severity. This trail was picked up by many subsequent studies, which resorted to an image-based encoding of vibration signals for accurate and reliable damage identification in various structural systems. While CNN can model local correlation, it is inefficient in capturing the global context. On the other hand, recurrent neural networks like long short-term memory (LSTM) are adept at learning long-term temporal dependencies hidden in sequential data. Hung et al. (2020) integrated these two independent approaches and proposed a hybrid DL algorithm for vibration-based damage identification in the three-story frame structure. Sajedi and Liang (2020) came up with a novel approach for damage diagnosis in an instrumented moment frame. The frame structure is represented as a grid environment, where each grid cell comprises a sensor node. The resulting formulation resembles an image, where each pixel stores the cumulative intensity measure of acceleration recorded at the corresponding sensor node. This input image is passed through an encoder-decoder semantic segmentation network to classify the damage severity level at each grid location. The proposed framework enables damage classification and localization at the same time. Most of the previous studies in this area adopted supervised learning approaches which entail expensive data acquisition and labeling under various damage conditions. Wang and Cha (2021) proposed a deep autoencoder-based unsupervised learning strategy that depends only on raw acceleration response data under intact conditions. The autoencoder reconstructs the input time series sequence, and any damage is identified based on the deviation between the original and reconstructed signals. This approach eliminates the need for labeled data under various damage scenarios. It was later extended by Shang et al. (2021), who invoked a denoising autoencoder to extract damage-sensitive features from noisy bridge vibration data. A denoising autoencoder is a class of autoencoders trained to remove noise from noise-corrupted signals. The features that are subsequently extracted are insensitive to measurement noise and environmental variations and were used to identify structural damages. Hakim et al. (2021) demonstrated that an ensemble neural network that combines predictions from multiple networks can produce better detection accuracy than any individual network acting alone. The authors substantiated this finding through a case study involving damage identification in a steel girder bridge based on its vibration characteristics.
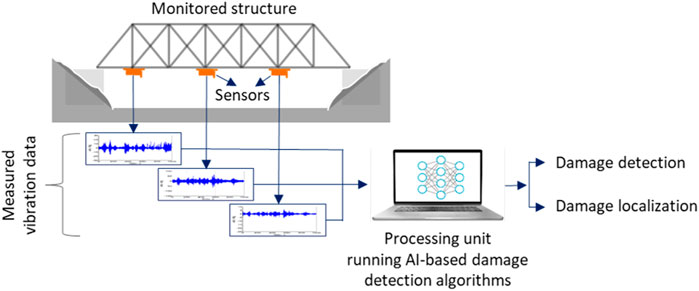
FIGURE 7. A general framework for vibration-based damage detection systems.
Concrete and steel are the most widely used construction materials in civil engineering. Estimation of various structural properties and deterioration phenomena concerning these two materials is another area that has seen extensive use of ML techniques over the past 2 decades. It is sometimes difficult to develop mathematical models which can accurately capture the material behavior, mainly due to the complexity of the process and multiplicity of the influencing parameters. More often than not, mathematical models are also disadvantaged by numerous modeling assumptions and simplifications, which lead to prediction uncertainties. The ML-based models, over the years, have proved to be a promising alternative in this regard. They can produce accurate results by learning complex patterns hidden in empirical data. Besides, they save a lot of time and cost that go into material testing of concrete and steel specimens. Even though these techniques have been used for estimating a range of different parameters, this study identifies five key focus areas that received maximum attention from the research community.
Carbonation is a natural phenomenon that causes premature deterioration of concrete. The atmospheric CO2 penetrates the pores in the concrete and reacts with hydrated cement. This chemical process reduces the alkalinity of concrete, leading to corrosion of reinforcement bars which eventually results in cracking and degradation of concrete. Liu et al. (2008) are perhaps one of the earliest studies that introduced the use of AI for the prediction of carbonation depth in concrete. The authors exploited a radial basis function neural network to estimate the carbonation depth based on three input features, namely water-gel ratio, cement content, and exposure time. In the following year, Bu et al. (2009) relied on the same set of features to forecast concrete carbonation depth based on a differential evolution-based back propagation neural network algorithm. Differential evolution (Fleetwood, 2004) was invoked by the authors to ensure that the entire solution space is searched and the global optimum is achieved irrespective of the initial values. Another study published in the same year Lu and Liu (2009) compared the efficiency of a back-propagation neural network and a radial basis function neural network in predicting the carbonation depth in prestressed concrete, and it concluded that the latter has superior accuracy. Another key contribution of this work is that it expanded the feature base to include the stress level of concrete, cement-fine aggregate ratio, and cement-coarse aggregate ratio. This study was followed by a lull which continued till 2014, when a back-propagation neural network was leveraged by Luo et al. (2014) to predict the length of partial carbonation zone in concrete on the basis of water-cent ratio, cement content, and relative humidity. The authors employed particle swarm optimization (Kennedy and Eberhart, 1995) to achieve faster convergence to the global minimum and stable solutions oblivious of the parameter initialization. Several studies came up in the following year, which added to the existing body of knowledge. Taffese et al. (2015a) proposed a neural network-based carbonation prediction model. The input to the neural network comprised fifteen variables comprising numeric and nominal data types such as cement type, carbonation period, name of plasticizers and air-entraining agents, etc. However, the most notable contribution of this work is that it identified the most influential input features using a sequential search algorithm (Kuncheva, 2014). In another paper published contemporaneously, the authors (Taffese et al., 2015b) resorted to decision trees for the prediction of concrete carbonation depth. A regression tree, a bagged ensemble regression tree, and a reduced bagged ensemble regression tree were taken up for comparative performance evaluation, and it was noticed that the reduced bagged ensemble regression tree outperforms the other two algorithms in terms of accuracy.
The elastic modulus is an important material property used in deformation calculations and other engineering analyses and design processes. However, it is hard to estimate the elastic modulus of concrete experimentally because of the elaborate and time-consuming test procedures. Demir and Korkmaz (2008) were the first to demonstrate that given the compressive strength, a fuzzy logic model (Kosko and Burgess, 1998) can predict the elastic modulus of high strength concrete more accurately than the predictive formulas provided by various codes. The relative superiority of ML models over the existing design codes was reaffirmed a year later by a follow-up study by Demir (2008), which leveraged an artificial neural network to accurately predict the elastic modulus of normal and high strength concrete. Yan and Shi (2010) in 2010, however, showed that support vector machine (Cortes and Vapnik, 1995) has even better generalization ability than artificial neural networks when it comes to elastic modulus prediction for normal and high strength concrete. Ahmadi-Nedushan (2012) further expanded the knowledge base in 2018 when he proposed an adaptive network-based fuzzy inference system model which outperformed an artificial neural network and a support vector machine in predicting the elastic modulus of normal strength concrete. In the case of high-strength concrete, it performed better than an artificial neural network but lost out to the support vector machine. Cao et al. (2013) recently proposed a support vector machine-based algorithm for elastic modulus prediction for self-compacting concrete. However, the unique contribution of this study was that it did not consider concrete compressive strength as an input feature. Contrarily, it predicted the elastic modulus from concrete density and a variety of coarse aggregate properties such as compactness, maximum diameter, strength, surface roughness, etc.
The chloride attack is a major safety concern for reinforced concrete structures exposed to deicing salt or marine environment. It corrodes the embedded reinforcement bars leading to the deterioration of concrete. The extent of chloride ingression is generally measured in terms of diffusion coefficient, which is not easy to obtain experimentally due to time and cost considerations. The state-of-the-art ML models come in handy in such situations, obliterating the need for an expensive and time-consuming material testing process. One of the earliest uses of ML techniques in this area dates back to 2002, when Peng et al. (2002), for the first time, showed that a cascade-correlation neural network (Fahlman and Lebiere, 1989) can accurately predict the chloride ion diffusion coefficient from the known values of exposure time and the contents of various mix design components such as cement, fly ash, micro-silica, and calcium nitrate solution. After a gap of 7 years, Song and Kwon (2009) proposed a back-propagation neural network for the prediction of chloride penetration in high-performance concrete. The input features included water-binder ratio and duration of exposure, in addition to unit weights of cement, ground granulated blast-furnace slag, fly ash, silica fume, sand, and coarse aggregate. The estimated diffusion coefficients compared favorably with the experimental values. Ghafoori et al. (2013) went a step further and invoked linear and nonlinear regression and a feed-forward back-propagation neural network for predicting rapid chloride permeability of self-consolidating concrete based on cement content, water-cement ratio, coarse and fine aggregate contents, and various admixture dosages. A detailed comparative assessment revealed that a back-propagation neural network can achieve higher accuracy than regression-based algorithms. This study was extended by Inthata et al. (2013) to normal and high strength concrete containing ground pozzolans such as fly ash, bottom ash, and rice husk ash. Water-binder ratio, percent replacement of pozzolanic materials, testing age, pozzolans type, aggregate-cement ratio, and the actual compressive strength of concrete were considered as input parameters. This study also reiterated the previous finding that artificial neural networks are more accurate than the linear and nonlinear regression approaches. A similar study published a year later by Kim et al. (2014) further validated this observation. A recent study by Hodhod and Ahmed (2013) also demonstrated that a back-propagation neural network can reliably predict the diffusion coefficient of high-performance concrete based on water-binder ratio, cement content, fly ash or slag content, and curing age.
The strength of structural materials under various loading conditions is an important property that is of utmost interest to designers and engineers. There has been no dearth of empirical and analytical models to predict the strength of concrete under various loading conditions. However, Mansour et al. (2004) was perhaps the first researcher to show that ML-based approaches can beat the traditional methods in terms of accuracy. The authors demonstrated this by predicting the shear strength of reinforced concrete beams using a multi-channel back-propagation neural network based on nine input parameters which include concrete compressive strength, yield strength of the transverse and longitudinal reinforcement bars, the span to effective depth ratio, the shear span to effective depth ratio, the transverse and longitudinal reinforcement ratios, and the cross-sectional dimensions of the beam. The developed predictive model outperformed the empirical equations provided by the building codes and the prevailing softened truss model theories. The next significant study in this area was by Prasad et al. (2009), who leveraged an artificial neural network to predict the 28-day compressive strength of self-compacting concrete and high-performance concrete, as well as the slump flow of self-compacting concrete. The predictions of the proposed model, which was based on several input variables like cement content, water-cement ratio, water-binder ratio, fly ash-binder ratio, micro silica-binder ratio, etc., showed close correlation with experimental data. In the following year, Naderpour et al. (2010) proposed an artificial neural network-based approach for the prediction of FRP-confined compressive strength of concrete leveraging unconfined strength of concrete, the elastic modulus of FRP, hoop tensile strength of FRP, the thickness of FRP, and diameter and length of the concrete specimen as input features. A comparison with existing empirical models indicated the superior performance of the proposed approach. Siddique et al. (2011) relied on an artificial neural network to predict the compressive strength of self-compacting concrete containing bottom ash as a partial replacement of fine aggregates. The strength of the specimens was predicted 7, 28, 90, and 365 days after casting based on the contents of cement, sand, coarse aggregate, fly ash, bottom ash, water, water-powder ratio, superplasticizer dosage, and a high correlation coefficient was recorded vis-à-vis experimental results. In the same year, another study was published (Atici, 2011), which capitalized on multi-variable regression analysis and artificial neural network to predict the compressive strength of concrete containing blast furnace slag and fly ash on the basis of additive properties and results of non-destructive evaluations such as rebound number and ultrasonic pulse velocity. In general, artificial neural networks performed better than multi-variable regression analysis for various concrete mix designs and curing times. An artificial neural network was also employed by Uysal and Tanyildizi (2012) to estimate the compressive strength of self-compacting concrete containing polypropylene fiber and mineral additives exposed to high temperature. Strength values predicted on the basis of the degree of heating and contents of cement, mineral additives, polypropylene fibers, and aggregates exhibited high accuracy compared with the test data. A new fusion-based algorithm was proposed by Cheng et al. (2012) by integrating fuzzy logic, a weighted support vector machine, and a fast messy genetic algorithm to predict the compressive strength of high-performance concrete. The proposed hybrid approach demonstrated higher prediction accuracy than a normal support vector machine and a back-propagation neural network. However, despite a few isolated cases of exceptions like this, artificial neural networks remained the most favored approach for predicting concrete strength. Dantas et al. (2013) used an artificial neural network for the prediction of the compressive strength of concrete containing construction and demolition waste. The model was based on seventeen different input parameters. The strength values evaluated after 3, 7, 28, and 91 days of hydration compared favorably with the observed data. In a similar study published concomitantly, Duan et al. (2013) exploited an artificial neural network to predict the compressive strength of recycled aggregate concrete on the basis of fourteen input parameters. Apart from shear and compressive strengths, another parameter that was looked into by previous studies was split tensile strength. Yan et al. (2013) cashed in on a support vector machine to show that it is possible to predict the split tensile strength of concrete from its compressive strength value. The proposed model outperformed the empirical relations provided in the building codes. Lee and Lee (2014) invoked an artificial neural network to predict the shear strength of FRP-reinforced concrete beam without stirrups based on compressive strength of concrete, effective depth, shear span to depth ratio, modulus of elasticity of FRP, and flexural reinforcement ratio. The predictions of the proposed model showed better agreement with test data than the design formulas provided in the existing building codes. Aiyer et al. (2014) explored a least square support vector machine and relevance vector machine to predict the compressive strength of self-compacting concrete based on the contents of cement, sand, coarse aggregate, fly ash, water-powder ratio, and superplasticizer dosage. The developed relevance vector machine-based model was shown to outperform the support vector machine as well as state-of-the-art artificial neural network-based approaches. Moreover, it produces the variance, which helps in the quantification of the prediction uncertainty. This study also conducted a sensitivity analysis to identify the most important parameters for prediction. Chou et al. (2014) investigated the efficiency of various ML algorithms vis-à-vis compressive strength prediction of high-performance concrete. The authors considered a multilayer perceptron, a support vector machine, classification and regression trees, and a linear regression model as the base learners and proposed an ensemble model by integrating different classifiers following the voting, bagging, and stacking strategies. A comprehensive performance evaluation established the relative superiority of the ensemble learning technique as opposed to the individual learning algorithms. Karina et al. (2017) proposed a feed-forward artificial neural network to predict the tensile strength of corroded steel plates based on corroded surface data and material properties. The model was trained and validated with data generated by finite element simulations and tensile tests conducted in the laboratory.
While concrete received a lot of attention from the scientific community, studies on structural steel are limited. One of the important deterioration phenomena associated with steel structures is fatigue. Therefore, the prediction of fatigue strength and fatigue life became the focus of a few studies in recent times. Yan and Shih (2010) relied on a modified bagging technique to predict the fatigue strength of steel. A publicly available fatigue data set from the National Institute of Material Science (NIMS) in Japan was used in this study to develop and validate the prediction model. A new meta-heuristic approach known as grey wolf optimizer (Mirjalili et al., 2014) was leveraged for optimization of the model parameters. Zhou and Song (2021) proposed an artificial neural network to predict the fatigue life of stainless steel specimens under uniaxial and multiaxial loadings. The proposed model was based on five genetic features, including peak axial stress and the corresponding axial strain, peak torsional stress and the corresponding shear strain, the axial hysteresis energy, and the torsional hysteresis energy. Yang et al. (2021) proposed a novel generalized deep learning method for fatigue life prediction, whose applicability cuts across various materials (e.g., metals, polymers, and composites), loading modes (e.g., stress-controlled, strain-controlled), loading levels (e.g., stress/strain amplitude, mean stress/strain), loading paths (e.g., uniaxial/multiaxial, proportional/non-proportional), and fatigue regimes (e.g., low-cycle, high-cycle). Zhang et al. (2020) performed a comparative evaluation to show that deep neural networks exhibit superior accuracy and generalization ability than the conventional ML approaches such as support vector machine, random forest, Gaussian process regression, and shallow neural networks when it comes to the life prediction of components under creep, fatigue, and creep-fatigue conditions.
Physics-based modeling represents the classical approach to analyzing the behavior of a structure. The suitability of this approach is limited to simple structures operating in controlled environments. Extending this method to real structures involving various complexities and uncertainties in terms of material behavior, boundary conditions, etc., is an onerous task. However, the advent of reliable, low-cost sensors has made data more accessible in recent years. On top of that, advancements in information technology and computational capability have led to the emergence of numerous data-driven algorithms for autonomous processing of the acquired sensory data. A key component of this large body of data-driven techniques is ML-based approaches, which require a sizable amount of data to execute model training. This is one of the significant bottlenecks which restrict the wide application of this approach, particularly when high-quality labeled data are scarce. Physics-informed ML models come in handy in such situations by infusing domain knowledge into the learning process, which partially mitigates the reliance on a large volume of data. This is a relatively new research area, which is increasingly becoming popular in the scientific community. One class of problems where domain knowledge can be exploited to guide the learning process is where a governing differential equation can mathematically represent the structural behavior. In such cases, a physics-based loss function is added to the existing data-based loss function to serve as a regulator to guide the training process to an optimal solution. As a proof of concept, Yuan et al. (2020) considered the case of vibration of a simply supported beam under transverse load, which can be analytically estimated using the Euler-Bernoulli beam theory. It was first shown that an artificial neural network can be used to solve the forward problem. Subsequently, the inverse problem was taken up, the focus of which was to reconstruct the entire displacement field from sparse sensor measurements. The governing differential equation was embedded into the loss function of an artificial neural network. It was observed that physics-informed learning led to lower reconstruction error than traditional data-driven learning. Zhang et al. (2020) proposed a physics-informed multi-LSTM network to estimate the nonlinear response of a structure under given ground motion excitations. The predicted response parameters included observable parameters such as relative displacement and velocity, as well as non-observable parameter such as hysteretic displacement. The physics knowledge was incorporated into the loss function, which was based on the equation of motion, state dependency, and hysteretic constitutive relationship. The proposed framework was validated on a 3-story moment-resisting frame and a Bouc-Wen hysteresis model (Wen, 1976). Xu and Noh (2021) proposed a physics-informed deep neural network model for the seismic damage diagnosis of buildings exploiting historical structural response data from other buildings. The knowledge transfer was achieved in this study through adversarial domain adaptation, which requires the extraction of domain-invariant features from the source and target buildings. Physics-guided weights were incorporated in the adversarial loss based on structural similarities between buildings to mitigate the biases introduced by less similar buildings. The new loss function prioritized knowledge transfer from source buildings that are physically more similar to the target building, leading to improved damage prediction results. Zhang and Sun (2021) proposed a physics-guided machine learning approach for structural damage identification based on the fusion of neural network and finite element model updating. In this approach, operational modal analysis is first used to obtain the modal properties from measured structural responses. A feature vector is then constructed based on the derived modal properties. Also, finite element model updating is conducted to obtain the damage severities at the locations under consideration. The feature vector is then extended to include the most probable damage location indicated by model updating. A neural network is then used to predict the damage class by minimizing a physics-based loss function guided by the results of finite element model updating. The proposed framework was validated by case studies of a numerical steel pedestrian bridge model and an experimental study on a three-story building model. Li et al. (2021) proposed a deep learning technique for predictive modelling of vortex-induced vibration of bridges. The proposed framework, which was guided by a time-dependent ordinary differential equation based on the semi-empirical Scanlan’s model and field monitoring data, was validated on a real long-span bridge subjected to real natural winds.
The general popularity of AI and ML techniques has increased over the years, leading to a plethora of research exploring automated solutions to various SHM problems. However, the adoption of these technologies has unfortunately not kept pace with R&D efforts, which can be attributed to the opacity and black-box character inherent to these automation-driven technologies. This, in recent years, has been responsible for a new thrust on the explainability or interpretability of ML algorithms aiming to inspire confidence among engineers, practitioners, and stakeholders by enhancing transparency in the decision-making process. One of the widely used explainable AI frameworks is based on SHapley Additive Explanations (SHAP) (Lundberg and Lee, 2017), which is a game theoretic concept used to interpret the predictions of an ML model. It can also measure the contribution of different features by evaluating an importance score corresponding to each feature. This framework was leveraged by Mangalathu et al. (2020) to explain the predictions of a random forest classifier which was trained to identify the failure modes of RC columns and shear walls based on various geometric and reinforcement properties. The authors also ranked the input features in their order of importance, which provided additional insight into the problem. Later, this technique was utilized by Abadíaa et al. (2021) to interpret the detection of damage-induced changes in the structural response of a simulated pedestrian bridge by a support vector machine-based outlier detection model. Recently, Wakjira et al. (2022) employed this interpretation technique on several ML-based regression models for predicting the flexural capacity of RC beams strengthened with fabric reinforced cementitious matrix composites. Pandey et al. (2022), on the other hand, resorted to another explanation technique called Local Interpretable Model-Agnostic Explanations (LIME) (Ribeiro et al., 2016), which explains the predictions of a complex model with the help of a local linear approximation of the model around a specific input. The feasibility of this approach was demonstrated on a CNN designed to detect damage in a thin aluminum plate based on its Lamb wave response. On the whole, it can be stated that this research area is currently at an infantile stage and needs much attention from the scientific community in the time ahead.
The general popularity of AI technologies has increased over the years, leading to a plethora of research exploring automated solutions to various civil engineering problems. Notably, many scientific studies came into existence focusing on AI techniques for autonomous inspection and condition assessment of civil infrastructures. However, the adoption of these technologies has unfortunately not kept pace with the R&D efforts. As a result, it has failed to evolve as a successful formula to bring about a major breakthrough in intelligent monitoring of infrastructure systems despite high expectations. This section presents a synopsis of some of the major technical challenges that merit attention from the scientific community.
The development of AI technologies has three stages, namely artificial narrow intelligence (ANI) (Kuusi and Heinonen, 2022), artificial general intelligence (AGI) (Goertzel and Pennachin, 2007), and artificial super intelligence (ASI) (Yampolskiy, 2015) (Figure 8). Artificial narrow intelligence assists humans in performing a specific task. However, it is less intelligent than humans and cannot completely eliminate human interventions. The next stage of development is artificial general intelligence, where an artificial agent is as intelligent as a human operator and can therefore function independently without any human supervision. The final stage of development leads to artificial super intelligence, where the artificial agent is more intelligent than a human being and can perform tasks that average humans cannot do. The defining goal of AI research is to transition from ANI to ASI via AGI. However, a review of previous studies suggests that the state-of-the-art methods for autonomous structural inspection are still constricted in the phase of artificial narrow intelligence, where AI techniques are used to facilitate specific tasks such as defect detection, segmentation, and quantification. However, human intervention at this stage is not yet dispensable, and therefore complete automation of the process is still a long way to go. Therefore, future research should aim to go the extra mile to make a giant leap toward artificial general intelligence, where an autonomous robotic system with human-like intelligence shall act like a human inspector in terms of exploring the environment, inspecting defects, collecting data, and making intelligent decisions regarding the best follow-up action, all by itself. This will indeed be a significant step forward which will accelerate the automation process by unlocking the next level in the autonomous inspection of civil infrastructure.
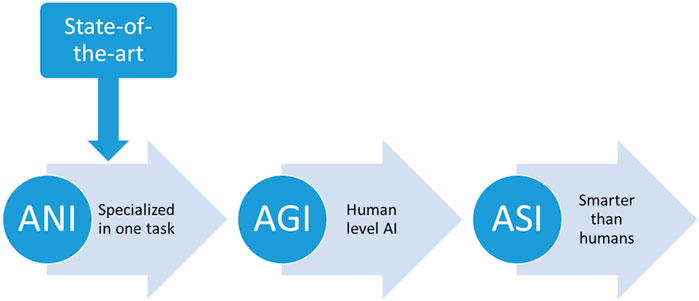
FIGURE 8. Various stages of AI development.
The future smart cities around the world will see the deployment of a broad range of IoT sensors for intelligent monitoring of civil infrastructure. The collected sensor data will be processed on the edge leveraging AI-assisted edge analytics to timely detect any structural defect posing a safety risk to the infrastructure. However, a review of available literature suggests that the existing IoT-based infrastructure sensing tools are largely deficient in onboard computing capability and therefore do not live up to the expectations of an intelligent SHM system. On the other hand, the existing AI-based infrastructure monitoring techniques are primarily based on complex algorithms involving expensive computation, which the traditional low-cost edge devices cannot support. Therefore, future studies should aim to address this research gap by developing lightweight AI solutions suitable for resource-constrained edge environments to achieve a reliable real-time response. A number of recent studies also explored decentralized approaches enabled by the latest blockchain technologies as a way to get around this problem (Jo et al., 2018; Sidorov et al., 2020; Alenazy, 2021; Xu et al., 2021b; Gigli et al., 2022; Gordan et al., 2021). Additionally, blockchain technology affords efficiency, scalability, data security, information transparency, and independent decision-making, which can play a pivotal role in overcoming some of the pressing limitations of future IoT platforms. However, research in this area is still at an infant stage and requires heightened attention from the scientific community in the time to come.
The existing vision-based inspection techniques rely mostly on RGB data due to the immediate availability of low-cost, high-resolution cameras. However, the traditional RGB cameras project 3D objects to a 2D space, leading to an information loss vis-à-vis distance and scale. Scientific studies in other disciplines have shown that various non-conventional imaging sensors such as depth, thermal, or hyperspectral cameras can provide vital information that traditional RGB cameras cannot capture. However, the SHM community has not fully exploited this knowledge to its advantage. A few researchers have explored multi-modal DL models in the past and observed that the fusion of heterogeneous data can lead to enhanced detection accuracy. However, many knowledge gaps still exist in this area which warrant a more detailed investigation in the future. Additionally, the recent augmented reality (AR) devices like Microsoft HoloLens (Microsoft, 2022) are equipped with multimodal sensors. Future studies should also look into utilizing the devices for the purpose of AI-assisted multimodal inspection.
The AI-based approaches for monitoring civil infrastructure require a lot of training data to produce accurate and reliable predictions. However, one of the major bottlenecks in this area is the lack of adequate field monitoring data, which restricts the wide application of these techniques. Moreover, manual annotation of the acquired data is labor-intensive and time-consuming. It is also expensive as it requires a trained workforce with domain knowledge to annotate the data accurately. Besides, any inadvertent human error in the annotation process may adversely impact the performance of the trained model. However, synthetic data produced in a simulated environment can provide a viable solution to many of these limitations (Hoskere et al., 2019; Narazaki et al., 2021; Hoskere et al., 2022). It enables the generation of a large amount of data in a limited time. Large-scale synthetic data can also be produced by generative adversarial networks (GANs) (Matinfar et al., 2022). It also permits automatic annotation of the data, which saves a lot of time and effort which go into the manual data annotation process. Therefore, training AI algorithms using synthetic training data should garner more attention from the research community in the time to come.
Mixed reality is one of the key enablers of the digital revolution the world is currently undergoing. Although a number of studies in the past relied on virtual reality-based solutions (Luleci et al., 2022), augmented reality holds a greater promise for future inspection applications as it overlays digital content and information onto the physical world. It is indisputable that this technology will see extensive use in the future inspection process to assist the human inspectors in quick and accurate decision-making (Xu et al., 2021b,a; Aguero et al., 2021). The multimodal data collected by heterogeneous sensor systems mounted on a wearable AR device can be processed onboard or on the cloud using smart AI-based techniques, and the relevant information about any identified defects (e.g., crack thickness, spalling depth, rebar exposure, etc.) can be projected on the actual structure under investigation, facilitating real-time visualization and prompt decision-making. Such an efficient human-machine interface provided by state-of-the-art AR devices such as Microsoft HoloLens will not only enhance the accuracy and quality of inspection but also reduce the latency and scope of human errors. Future studies should focus on developing efficient frameworks for seamless integration of this technology into the existing structural inspection process leading to safer and more resilient civil infrastructure systems.
In this context, it may be mentioned that the corresponding author’s research group recently developed a HoloLens-based AR interface, which is intended to revolutionize the bridge inspection pipeline through 3D data collection, storage, retrieval, and analysis (Figure 9A). It provides the inspector with intraoperative hands-free access to complex data and seamless interaction with the real physical environment through bi-directional wireless communications. It imports a high-resolution 3D reconstructed and georeferenced bridge model from a laser scanner preserving the model texture and size. Following this, the imported bridge model can be overlaid on the real physical bridge with the virtual and physical features roughly aligned (Figure 9B). The model can be scaled, rotated, and repositioned in the x, y, and z directions manually or by inputting an accurate desirable value to improve the accuracy of alignment. A world locking system and space pins can be employed to accurately anchor the bridge model with the real structure to benefit future revisits. Subsequent to this, the Photograph mode in the function menu can be invoked to capture and localize the defect areas. Additionally, the preliminary bridge element category and the corresponding service conditions can be annotated, as illustrated in Figure 9C. The defect metadata and the legacy inspection data can be saved for a future cloud synchronization with an Azure SQL database. On the other hand, the Measure mode allows the user to select the start point and raycast measurement points in sequence, enabling dimension measurement along a specified bridge element surface. The Control mode provides a user interface for remote-piloting a robotic platform according to a pre-defined mission plan and executing any given inspection task. Last but not least, the Display mode portrays the current and historical defect pictures, annotations, and the recorded measurements to facilitate lucid visualization by the user, assisting in further comparative analyses. Apart from the Azure cloud database, a local database is maintained as a temporary backup and synchronized to the cloud database from time to time to prevent data loss and to allow seamless access to data anytime and anywhere. The proposed AR-assisted inspection system is believed to improve the quality of beyond-visual-line-of-sight inspection as well as the overall bridge asset condition assessment workflow. It can also be potentially integrated with the semi-supervised assistive intelligence framework developed by the authors (Karim et al., 2022), leading to enhanced bridge elements defects detection in inspection videos.
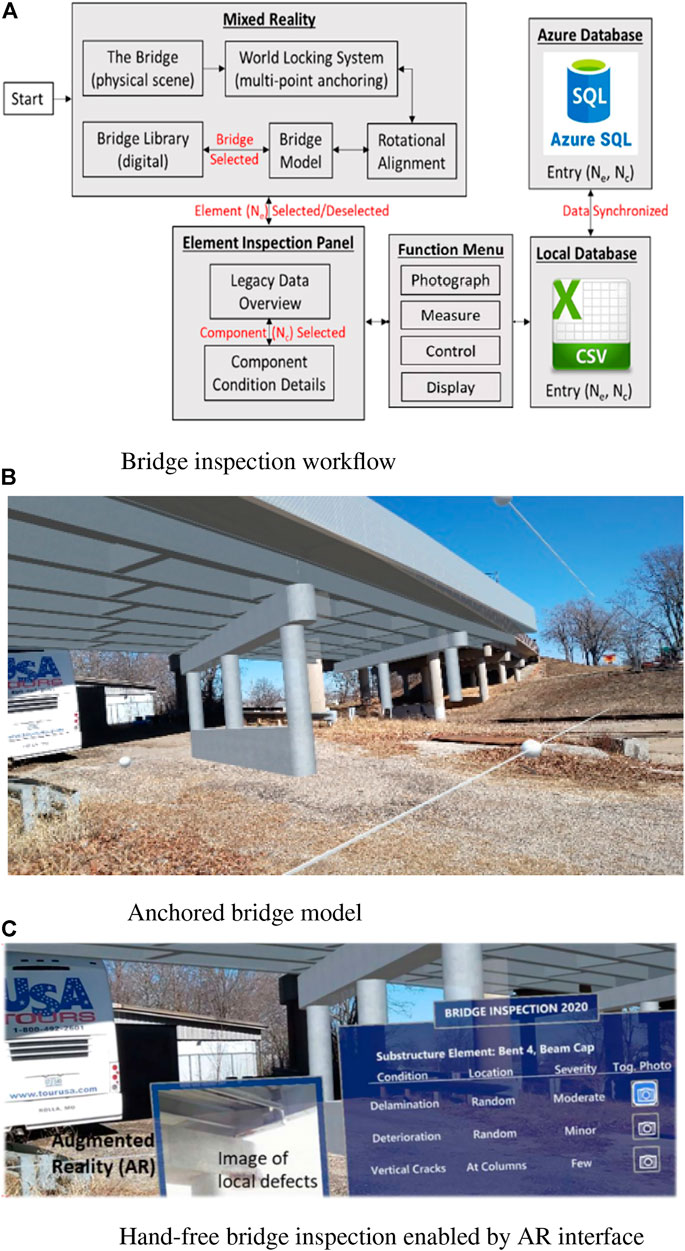
FIGURE 9. Development of AR-assisted bridge inspection platform (Li and Chen 2022). (A) Bridge inspection workflow. (B) Anchored bridge model. (C) Hand-free bridge inspection enabled by AR interface.
The quality of monitoring data is an important parameter that profoundly impacts the accuracy of AI-based defect detection algorithms. Any corruption of the monitoring data can degrade the system performance considerably. However, measurement noise is almost inevitable even in the most advanced sensor systems. In the case of UAS-assisted visual inspection, the video quality is often compromised due to the use of low-cost cameras, motion blur induced by the UAS movements, and distortions caused by fisheye lenses. Moreover, physical inaccessibility often prevents the UAS from going very close to the structure under investigation, resulting in low-resolution imaging, which lacks the optical details necessary for accurate analytics. In this context, the SHM community can exploit the latest AI-based video super-resolution techniques (Kondo and Ukita, 2021; Xiang et al., 2022), which can reconstruct high-resolution videos from the original low-resolution inputs. This will enable the UAS to maintain a large working distance and viewing perspective by flying far from the structure and thereby complete a given inspection task within the boundary of limited flight time. Therefore, future studies should focus on developing lightweight video super-resolution algorithms compatible with the UAS’ limited onboard computation capacity and competent for online vision-based damage identification.
The existing schemes for structural inspection are mostly schedule-based, where a structure is inspected at a regular time interval. The lack of an accurate predictive model prevents the infrastructure managers from moving to condition-based inspection, where the inspection frequency can be adjusted based on the predicted level of infrastructure deterioration. Even though preventive maintenance of infrastructure is not a new topic of investigation, only a few researchers, however, have actually looked into deterioration forecasting based on historical visual inspection data. Recent advances in GANs have opened up new opportunities to fill this critical knowledge gap prevailing in this important area of research (Bianchi and Hebdon, 2021; Sekar and Perumal, 2022) and should be a focus of future studies.
In recent years, advanced SHM systems have witnessed an increasing use of the Global Positioning System (GPS) for accurate measurement of structural displacement (Yi et al., 2010, 2013). A GPS offers several advantages, such as weather independence, operational autonomy, and non-essentialness of a line-of-sight between target points, which make it a promising alternative to other traditional displacement measurement systems. A modern GPS can achieve subcentimeter to millimeter level accuracy in displacement measurement at a frequency of up to 100 Hz and a maximum distance of 30 km from the reference GPS receivers to the receivers installed on the structure under investigation. However, the increase in the use cases of GPS was accompanied by a simultaneous increase in the requirement for positional accuracy. One of the key elements vital for ensuring high positional accuracy is the coordinate transformation of GPS measurements from local to global coordinate systems. A few researchers looked into the prospect of leveraging latest AI techniques for accurate processing of GPS data (Wang and Cha, 2021). However, further attention is required from the scientific community to make deeper inroads in this area of research.
It is generally accepted that AI will drive the next revolution in autonomous inspection and health monitoring of civil infrastructure. The possibility of complete automation of the inspection process resulted in a lot of attention from the scientific community leading to a plethora of research in this area. The need to summarize the large body of published literature has given rise to several survey papers outlining the current trends and potential future research directions. However, the existing review papers fail to provide a clear chronology of scientific advancements achieved by researchers in the past. This paper filled this information gap by providing a detailed account of how this vital area of research evolved through several landmark studies coming into existence at different points in time. It is believed that this paper will afford the readers a quick familiarity with the historical background, current trends, and future prospects of this research arena. It will also help them identify the major problem areas that need immediate attention from the research community.
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
TM: Manuscript outline, draft, and revisions; GC: Manuscript concept, review, and edit as well as funding.
The financial support to complete this study was provided in part by the US Department of Transportation, Office of Assistant Secretary for Research and Technology under the auspices of Mid-America Transportation Center at the University of Nebraska, Lincoln (Grant no. 00059709).
The views and results presented in this publication are solely those of the authors and do not represent the official position of the sponsor and any state or other entities.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Abadíaa, J. J. P., Fritza, H., Dadoulisb, G., Dragosa, K., and Smarslya, K. (2021). “Automated decision making in structural health monitoring using explainable artificial intelligence,” in EG-ICE 2021 workshop on intelligent computing in engineering (Berlin, Germany: Universitätsverlag der TU Berlin), 432.
Abdel-Qader, I., Pashaie-Rad, S., Abudayyeh, O., and Yehia, S. (2006). Pca-based algorithm for unsupervised bridge crack detection. Adv. Eng. Softw. 37, 771–778. doi:10.1016/j.advengsoft.2006.06.002
Abdeljaber, O., Avci, O., Kiranyaz, S., Gabbouj, M., and Inman, D. J. (2017). Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 388, 154–170. doi:10.1016/j.jsv.2016.10.043
Aguero, M., Doyle, D., Mascarenas, D., and Moreu, F. (2021). Visualization of real-time displacement time history superimposed with dynamic experiments using wireless smart sensors (wss) and augmented reality (ar). arXiv preprint arXiv:2110.08700.
Ahmadi-Nedushan, B. (2012). Prediction of elastic modulus of normal and high strength concrete using anfis and optimal nonlinear regression models. Constr. Build. Mater. 36, 665–673. doi:10.1016/j.conbuildmat.2012.06.002
Aiyer, B. G., Kim, D., Karingattikkal, N., Samui, P., and Rao, P. R. (2014). Prediction of compressive strength of self-compacting concrete using least square support vector machine and relevance vector machine. KSCE J. Civ. Eng. 18, 1753–1758. doi:10.1007/s12205-014-0524-0
Alenazy, W. M. (2021). “Blockchain-Enabled internet of things for unsupervised structural health monitoring in potential building structures,” in Handbook of Research on Innovations and Applications of AI, IoT, and Cognitive Technologies (IGI Global), 158–170.
Atha, D. J., and Jahanshahi, M. R. (2018). Evaluation of deep learning approaches based on convolutional neural networks for corrosion detection. Struct. Health Monit. 17, 1110–1128. doi:10.1177/1475921717737051
Atici, U. (2011). Prediction of the strength of mineral admixture concrete using multivariable regression analysis and an artificial neural network. Expert Syst. Appl. 38, 9609–9618. doi:10.1016/j.eswa.2011.01.156
Azimi, M., Eslamlou, A. D., and Pekcan, G. (2020). Data-driven structural health monitoring and damage detection through deep learning: State-of-the-art review. Sensors 20, 2778. doi:10.3390/s20102778
Bao, Y., and Li, H. (2021). Machine learning paradigm for structural health monitoring. Struct. Health Monit. 20, 1353–1372.
Bianchi, E., and Hebdon, M. (2021). “Forecasting infrastructure deterioration with inverse gans,” in Applications of machine learning 2021 (San Diego, CA: SPIE), 11843, 1184304.
Bu, N., Yang, G., and Zhao, H. (2009). Prediction of concrete carbonization depth based on de-bp neural network. Int. Symposium Intelligent Inf. Technol. Appl. (IEEE) 3, 240–243.
Cao, Y. F., Wu, W., Zhang, H. L., and Pan, J. M. (2013). “Prediction of the elastic modulus of self-compacting concrete based on svm,” in Applied mechanics and materials (Bäch SZ, Switzerland: Trans Tech Publ), 357, 1023–1026.
Cha, Y.-J., Choi, W., and Büyüköztürk, O. (2017). Deep learning-based crack damage detection using convolutional neural networks. Computer-Aided Civ. Infrastructure Eng. 32, 361–378. doi:10.1111/mice.12263
Cha, Y.-J., Choi, W., Suh, G., Mahmoudkhani, S., and Büyüköztürk, O. (2018). Autonomous structural visual inspection using region-based deep learning for detecting multiple damage types. Computer-Aided Civ. Infrastructure Eng. 33, 731–747. doi:10.1111/mice.12334
Chen, F.-C., and Jahanshahi, M. R. (2017). Nb-cnn: Deep learning-based crack detection using convolutional neural network and naïve bayes data fusion. IEEE Trans. Ind. Electron. 65, 4392–4400. doi:10.1109/tie.2017.2764844
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and Yuille, A. L. (2017a). Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 40, 834–848. doi:10.1109/tpami.2017.2699184
Chen, L.-C., Papandreou, G., Schroff, F., and Adam, H. (2017b). Rethinking atrous convolution for semantic image segmentation. arXiv preprint arXiv:1706.05587.
Chen, P.-H., Shen, H.-K., Lei, C.-Y., and Chang, L.-M. (2012). Support-vector-machine-based method for automated steel bridge rust assessment. Automation Constr. 23, 9–19. doi:10.1016/j.autcon.2011.12.001
Cheng, J. C., and Wang, M. (2018). Automated detection of sewer pipe defects in closed-circuit television images using deep learning techniques. Automation Constr. 95, 155–171. doi:10.1016/j.autcon.2018.08.006
Cheng, M.-Y., Chou, J.-S., Roy, A. F., and Wu, Y.-W. (2012). High-performance concrete compressive strength prediction using time-weighted evolutionary fuzzy support vector machines inference model. Automation Constr. 28, 106–115. doi:10.1016/j.autcon.2012.07.004
Chou, J.-S., Tsai, C.-F., Pham, A.-D., and Lu, Y.-H. (2014). Machine learning in concrete strength simulations: Multi-nation data analytics. Constr. Build. Mater. 73, 771–780. doi:10.1016/j.conbuildmat.2014.09.054
Cord, A., and Chambon, S. (2012). Automatic road defect detection by textural pattern recognition based on adaboost. Computer-Aided Civ. Infrastructure Eng. 27, 244–259. doi:10.1111/j.1467-8667.2011.00736.x
Cortes, C., and Vapnik, V. (1995). Support-vector networks. Mach. Learn. 20, 273–297. doi:10.1007/bf00994018
Dantas, A. T. A., Leite, M. B., and de Jesus Nagahama, K. (2013). Prediction of compressive strength of concrete containing construction and demolition waste using artificial neural networks. Constr. Build. Mater. 38, 717–722. doi:10.1016/j.conbuildmat.2012.09.026
Demir, F., and Korkmaz, K. A. (2008). Prediction of lower and upper bounds of elastic modulus of high strength concrete. Constr. Build. Mater. 22, 1385–1393. doi:10.1016/j.conbuildmat.2007.04.012
Demir, F. (2008). Prediction of elastic modulus of normal and high strength concrete by artificial neural networks. Constr. Build. Mater. 22, 1428–1435. doi:10.1016/j.conbuildmat.2007.04.004
Deng, J., Lu, Y., and Lee, V. C.-S. (2021). Imaging-based crack detection on concrete surfaces using you only look once network. Struct. Health Monit. 20, 484–499. doi:10.1177/1475921720938486
Diez, A., Khoa, N. L. D., Makki Alamdari, M., Wang, Y., Chen, F., and Runcie, P. (2016). A clustering approach for structural health monitoring on bridges. J. Civ. Struct. Health Monit. 6, 429–445. doi:10.1007/s13349-016-0160-0
Doa’ei, Y., and Jahan, A. M. (2018). Application of artificial intelligence and meta-heuristic algorithms in civil health monitoring systems. CivileJournal. 4, 1653–1666. doi:10.28991/cej-03091102
Duan, Z.-H., Kou, S.-C., and Poon, C.-S. (2013). Prediction of compressive strength of recycled aggregate concrete using artificial neural networks. Constr. Build. Mater. 40, 1200–1206. doi:10.1016/j.conbuildmat.2012.04.063
Fahlman, S., and Lebiere, C. (1989). The cascade-correlation learning architecture. Adv. neural Inf. Process. Syst. 2.
Feng, M. Q., and Bahng, E. Y. (1999). Damage assessment of jacketed rc columns using vibration tests. J. Struct. Eng. (N. Y. N. Y). 125, 265–271. doi:10.1061/(asce)0733-9445(1999)125:3(265)
Fischler, M. A., and Bolles, R. C. (1981). Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 24, 381–395. doi:10.1145/358669.358692
Flah, M., Nunez, I., Ben Chaabene, W., and Nehdi, M. L. (2021). Machine learning algorithms in civil structural health monitoring: A systematic review. Arch. Comput. Methods Eng. 28, 2621–2643. doi:10.1007/s11831-020-09471-9
Fleetwood, K. (2004). “An introduction to differential evolution,” in Proceedings of mathematics and statistics of complex systems (MASCOS) one day symposium (Brisbane, Australia, 785–791.
Freund, Y., Schapire, R., and Abe, N. (1999). A short introduction to boosting. Journal-Japanese Soc. Artif. Intell. 14, 1612.
Gao, Y., and Mosalam, K. M. (2020). Peer hub imagenet: A large-scale multiattribute benchmark data set of structural images. J. Struct. Eng. (N. Y. N. Y). 146, 04020198. doi:10.1061/(asce)st.1943-541x.0002745
Ghafoori, N., Najimi, M., Sobhani, J., and Aqel, M. A. (2013). Predicting rapid chloride permeability of self-consolidating concrete: A comparative study on statistical and neural network models. Constr. Build. Mater. 44, 381–390. doi:10.1016/j.conbuildmat.2013.03.039
Ghosh Mondal, T., Jahanshahi, M. R., Wu, R.-T., and Wu, Z. Y. (2020). Deep learning-based multi-class damage detection for autonomous post-disaster reconnaissance. Struct. Control Health Monit. 27, e2507. doi:10.1002/stc.2507
Gigli, L., Sciullo, L., Montori, F., Marzani, A., and Di Felice, M. (2022). “Blockchain and web of things for structural health monitoring applications: A proof of concept,” in 2022 IEEE 19th Annual Consumer Communications and Networking Conference (CCNC) (IEEE), 699–702.
Goh, L., Bakhary, N., Rahman, A., and Ahmad, B. (2013). Prediction of unmeasured mode shape using artificial neural network for damage detection. J. Teknol. 61. doi:10.11113/jt.v61.1624
Golinval, J.-C., De Boe, P., Yan, A., and Kerschen, G. (2004). “Structural damage detection based on pca of vibration measurements,” in 58th meeting of the soc. For mach (Virginia Beach: Failure Prevention Tech).
Gopalakrishnan, K., Khaitan, S. K., Choudhary, A., and Agrawal, A. (2017). Deep convolutional neural networks with transfer learning for computer vision-based data-driven pavement distress detection. Constr. Build. Mater. 157, 322–330. doi:10.1016/j.conbuildmat.2017.09.110
Gordan, M., Ismail, Z., Mohd Rahim, F. A., Chao, O. Z., Ibrahim, Z., Hashim, H., et al. (2021). Defining a conceptual framework for vibration-based damage detection platforms using blockchain. J. Civ. Eng. Mater. Appl. 5 (1), 25–33.
Grand-View-Research, G. V. R. (2022a). Commercial drone market size, share trends analysis report by product (fixed-wing, rotary blade, hybrid), 2021–2028. by application, by end-use, by region, and segment forecastsAvailable at: https://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market.
Grand-View-Research, G. V. R. (2022b). Industrial internet of things market size, share trends analysis report by component (solution, services, platform), by end use (manufacturing, logistics transport), by region, and segment forecasts, 2021–2028. Available at: https://www.grandviewresearch.com/industry-analysis/industrial-internet-of-things-iiot-market.
Guo, J., Wang, Q., Li, Y., and Liu, P. (2020). Façade defects classification from imbalanced dataset using meta learning-based convolutional neural network. Computer‐Aided. Civ. Infrastructure Eng. 35, 1403–1418. doi:10.1111/mice.12578
Hakim, S., Mokhatar, S., Shahidan, S., Chik, T., Jaini, Z., Abd Ghafar, N., et al. (2021). An ensemble neural network for damage identification in steel girder bridge structure using vibration data. cea. 9, 523–532. doi:10.13189/cea.2021.090225
He, H.-x., Zheng, J.-c., Liao, L.-c., and Chen, Y.-j. (2021). Damage identification based on convolutional neural network and recurrence graph for beam bridge. Struct. Health Monit. 20, 1392–1408.
He, K., Gkioxari, G., Dollár, P., and Girshick, R. (2017). “Mask r-cnn,” in Proceedings of the IEEE international conference on computer vision, 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). “Deep residual learning for image recognition,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 770–778.
Hodhod, O., and Ahmed, H. (2013). Developing an artificial neural network model to evaluate chloride diffusivity in high performance concrete. HBRC J. 9, 15–21. doi:10.1016/j.hbrcj.2013.04.001
Hoskere, V., Narazaki, Y., Hoang, T. A., and Spencer, B. (2020). Madnet: Multi-task semantic segmentation of multiple types of structural materials and damage in images of civil infrastructure. J. Civ. Struct. Health Monit. 10, 757–773. doi:10.1007/s13349-020-00409-0
Hoskere, V., Narazaki, Y., and Spencer, B. F. (2022). Physics-based graphics models in 3d synthetic environments as autonomous vision-based inspection testbeds. Sensors 22, 532. doi:10.3390/s22020532
Hoskere, V., Narazaki, Y., Spencer, B. F., and Smith, M. D. (2019). “Deep learning-based damage detection of miter gates using synthetic imagery from computer graphics,” in 12th international workshop on structural health monitoring: Enabling intelligent life-cycle health management for industry internet of things (IIOT), IWSHM 2019 (Standford: DEStech Publications Inc.), 3073–3080.
Hou, S., Dong, B., Wang, H., and Wu, G. (2020). Inspection of surface defects on stay cables using a robot and transfer learning. Automation Constr. 119, 103382. doi:10.1016/j.autcon.2020.103382
Huang, G.-B., Zhu, Q.-Y., and Siew, C.-K. (2006). Extreme learning machine: Theory and applications. Neurocomputing 70, 489–501. doi:10.1016/j.neucom.2005.12.126
Huang, H.-w., Li, Q.-t., and Zhang, D.-m. (2018). Deep learning based image recognition for crack and leakage defects of metro shield tunnel. Tunn. Undergr. space Technol. 77, 166–176. doi:10.1016/j.tust.2018.04.002
Hung, D. V., Hung, H. M., Anh, P. H., and Thang, N. T. (2020). Structural damage detection using hybrid deep learning algorithm. J. Sci. Technol. Civ. Eng. (STCE)-HUCE 14, 53–64. doi:10.31814/stce.nuce2020-14(2)-05
Inthata, S., Kowtanapanich, W., and Cheerarot, R. (2013). Prediction of chloride permeability of concretes containing ground pozzolans by artificial neural networks. Mat. Struct. 46, 1707–1721. doi:10.1617/s11527-012-0009-x
Jahanshahi, M. R., and Masri, S. F. (2011). “Nondestructive vision-based approaches for condition assessment of structures,” in Nondestructive characterization for composite materials, aerospace engineering, civil infrastructure, and homeland security 2011 (San Diego, CA: International Society for Optics and Photonics), 7983, 79831X.
Jenkins, M. D., Carr, T. A., Iglesias, M. I., Buggy, T., and Morison, G. (2018). “A deep convolutional neural network for semantic pixel-wise segmentation of road and pavement surface cracks,” in 2018 26th European signal processing conference (EUSIPCO) (IEEE), 2120–2124.
Ji, A., Xue, X., Wang, Y., Luo, X., and Xue, W. (2020). An integrated approach to automatic pixel-level crack detection and quantification of asphalt pavement. Automation Constr. 114, 103176. doi:10.1016/j.autcon.2020.103176
Jiang, S.-F., Zhang, C.-M., and Koh, C. (2006). Structural damage detection by integrating data fusion and probabilistic neural network. Adv. Struct. Eng. 9, 445–458. doi:10.1260/136943306778812787
Jiang, S.-F., Zhang, C.-M., and Yao, J. (2011). Eigen-level data fusion model by integrating rough set and probabilistic neural network for structural damage detection. Adv. Struct. Eng. 14, 333–349. doi:10.1260/1369-4332.14.2.333
Jo, B. W., Khan, R. M. A., and Lee, Y. S. (2018). Hybrid blockchain and internet-of-things network for underground structure health monitoring. Sensors 18 (12), 4268.
Karim, M. M., Qin, R., Chen, G., and Yin, Z. (2022). A semi-supervised self-training method to develop assistive intelligence for segmenting multiclass bridge elements from inspection videos. Struct. Health Monit. 21, 835–852. doi:10.1177/14759217211010422
Karina, C. N., Chun, P. J., and Okubo, K. (2017). Tensile strength prediction of corroded steel plates by using machine learning approach. Steel Compos. Struct. 24 (5), 635–641.
Kaseko, M. S., and Ritchie, S. G. (1993). A neural network-based methodology for pavement crack detection and classification. Transp. Res. Part C Emerg. Technol. 1, 275–291. doi:10.1016/0968-090x(93)90002-w
Kennedy, J., and Eberhart, R. (1995). Particle swarm optimization. In Proceedings of ICNN’95-international conference on neural networks. IEEE) 4, 1942–1948.
Kim, Y.-Y., Lee, B.-J., and Kwon, S.-J. (2014). Evaluation technique of chloride penetration using apparent diffusion coefficient and neural network algorithm. Adv. Mater. Sci. Eng., 1–13. doi:10.1155/2014/647243
Kondo, Y., and Ukita, N. (2021). “Crack segmentation for low-resolution images using joint learning with super-resolution,” in 2021 17th international conference on machine vision and applications (MVA) (IEEE), 1–6.
Kumar, S. S., Wang, M., Abraham, D. M., Jahanshahi, M. R., Iseley, T., and Cheng, J. C. (2020). Deep learning–based automated detection of sewer defects in cctv videos. J. Comput. Civ. Eng. 34, 04019047. doi:10.1061/(asce)cp.1943-5487.0000866
Kuusi, O., and Heinonen, S. (2022). Scenarios from artificial narrow intelligence to artificial general intelligence—reviewing the results of the international work/technology 2050 study. Newbury Park, CA: World Futures Review. 19467567221101637.
Lee, S., and Lee, C. (2014). Prediction of shear strength of frp-reinforced concrete flexural members without stirrups using artificial neural networks. Eng. Struct. 61, 99–112. doi:10.1016/j.engstruct.2014.01.001
Li, L., and Chen, G. (2022). “Mixed reality interface of geospatial data towards efficient, effective, and reliable bridge inspection,” in 8th World Conference on Structural Control and Monitoring (8WCSCM), Orlando, FL.
Li, S., Laima, S., and Li, H. (2021). Physics-guided deep learning framework for predictive modeling of bridge vortex-induced vibrations from field monitoring. Phys. Fluids 33, 037113. doi:10.1063/5.0032402
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C.-Y., et al. (2016). “Ssd: Single shot multibox detector,” in European conference on computer vision (Springer), 21–37.
Liu, Y., Yao, J., Lu, X., Xie, R., and Li, L. (2019). Deepcrack: A deep hierarchical feature learning architecture for crack segmentation. Neurocomputing 338, 139–153. doi:10.1016/j.neucom.2019.01.036
Liu, Y., Zhao, S., and Yi, C. (2008). The forecast of carbonation depth of concrete based on rbf neural network. Int. Symposium Intelligent Inf. Technol. Appl. (IEEE) 3, 544–548.
Liu, Z., Suandi, S. A., Ohashi, T., and Ejima, T. (2002). “Tunnel crack detection and classification system based on image processing,” in Machine vision applications in industrial inspection X (San Jose, CA: SPIE), 4664, 145–152.
Long, J., Shelhamer, E., and Darrell, T. (2015). “Fully convolutional networks for semantic segmentation,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 3431–3440.
Lu, C., and Liu, R. (2009). Predicting carbonation depth of prestressed concrete under different stress states using artificial neural network. Adv. Artif. Neural Syst., 1–8. doi:10.1155/2009/193139
Luleci, F., Li, L., Chi, J., Reiners, D., Cruz-Neira, C., and Catbas, F. N. (2022). Structural health monitoring of a foot bridge in virtual reality environment. Procedia Struct. Integr. 37, 65–72.
Lundberg, S. M., and Lee, S.-I. (2017). A unified approach to interpreting model predictions. Adv. neural Inf. Process. Syst. 30.
Luo, D., Niu, D., and Dong, Z. (2014). Application of neural network for concrete carbonation depth prediction.
Maeda, H., Sekimoto, Y., Seto, T., Kashiyama, T., and Omata, H. (2018). Road damage detection and classification using deep neural networks with smartphone images. Computer-Aided Civ. Infrastructure Eng. 33, 1127–1141. doi:10.1111/mice.12387
Mandal, V., Uong, L., and Adu-Gyamfi, Y. (2018). “Automated road crack detection using deep convolutional neural networks,” in 2018 IEEE international conference on big data (big data) (IEEE), 5212–5215.
Mangalathu, S., Hwang, S.-H., and Jeon, J.-S. (2020). Failure mode and effects analysis of rc members based on machine-learning-based shapley additive explanations (shap) approach. Eng. Struct. 219, 110927. doi:10.1016/j.engstruct.2020.110927
Mansour, M. Y., Dicleli, M., Lee, J.-Y., and Zhang, J. (2004). Predicting the shear strength of reinforced concrete beams using artificial neural networks. Eng. Struct. 26, 781–799. doi:10.1016/j.engstruct.2004.01.011
Masrour, T., El Hassani, I., and Bouchama, M. S. (2019). “Deep convolutional neural networks with transfer learning for old buildings pathologies automatic detection,” in International conference on advanced intelligent systems for sustainable development (Springer), 204–216.
Matinfar, M., Khaji, N., and Ahmadi, G. (2022). Deep convolutional generative adversarial networks for the generation of numerous artificial spectrum-compatible earthquake accelerograms using a limited number of ground motion records. Comput. aided. Civ. Eng. doi:10.1111/mice.12852
Meruane, V. (2016). Online sequential extreme learning machine for vibration-based damage assessment using transmissibility data. J. Comput. Civ. Eng. 30, 04015042. doi:10.1061/(asce)cp.1943-5487.0000517
Microsoft, M. S. (2022). Microsoft hololens 2. Available at: https://www.microsoft.com/en-us/hololens.
Mirjalili, S., Mirjalili, S. M., and Lewis, A. (2014). Grey wolf optimizer Advances in Engineering Software 69, 46–61.
Naderpour, H., Kheyroddin, A., and Amiri, G. G. (2010). Prediction of frp-confined compressive strength of concrete using artificial neural networks. Compos. Struct. 92, 2817–2829. doi:10.1016/j.compstruct.2010.04.008
Narazaki, Y., Hoskere, V., Yoshida, K., Spencer, B. F., and Fujino, Y. (2021). Synthetic environments for vision-based structural condition assessment of Japanese high-speed railway viaducts. Mech. Syst. Signal Process. 160, 107850. doi:10.1016/j.ymssp.2021.107850
Nie, M., and Wang, K. (2018). “Pavement distress detection based on transfer learning,” in 2018 5th International conference on systems and informatics (ICSAI) (IEEE), 435–439.
Oh, B. K., Glisic, B., Kim, Y., and Park, H. S. (2019). Convolutional neural network-based wind-induced response estimation model for tall buildings. Computer‐Aided. Civ. Infrastructure Eng. 34, 843–858. doi:10.1111/mice.12476
Osornio-Rios, R. A., Amezquita-Sanchez, J. P., Romero-Troncoso, R. J., and Garcia-Perez, A. (2012). Music-ann analysis for locating structural damages in a truss-type structure by means of vibrations. Computer-Aided Civ. Infrastructure Eng. 27, 687–698. doi:10.1111/j.1467-8667.2012.00777.x
Pan, Y., and Zhang, L. (2021). Dual attention deep learning network for automatic steel surface defect segmentation. Comput. aided. Civ. Eng. 37, 1468–1487. doi:10.1111/mice.12792
Pandey, P., Rai, A., and Mitra, M. (2022). Explainable 1-d convolutional neural network for damage detection using lamb wave. Mech. Syst. Signal Process. 164, 108220. doi:10.1016/j.ymssp.2021.108220
Pathirage, C. S. N., Li, J., Li, L., Hao, H., Liu, W., and Ni, P. (2018). Structural damage identification based on autoencoder neural networks and deep learning. Eng. Struct. 172, 13–28. doi:10.1016/j.engstruct.2018.05.109
Peng, J., Li, Z., and Ma, B. (2002). Neural network analysis of chloride diffusion in concrete. J. Mat. Civ. Eng. 14, 327–333. doi:10.1061/(asce)0899-1561(2002)14:4(327)
Perez, H., Tah, J. H., and Mosavi, A. (2019). Deep learning for detecting building defects using convolutional neural networks. Sensors 19, 3556. doi:10.3390/s19163556
Prasad, B. R., Eskandari, H., and Reddy, B. V. (2009). Prediction of compressive strength of scc and hpc with high volume fly ash using ann. Constr. Build. Mater. 23, 117–128. doi:10.1016/j.conbuildmat.2008.01.014
Prasanna, P., Dana, K. J., Gucunski, N., Basily, B. B., La, H. M., Lim, R. S., et al. (2014). Automated crack detection on concrete bridges. IEEE Trans. Autom. Sci. Eng. 13, 591–599. doi:10.1109/tase.2014.2354314
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A. (2016). “You only look once: Unified, real-time object detection,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 779–788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. neural Inf. Process. Syst. 28.
Ren, Y., Huang, J., Hong, Z., Lu, W., Yin, J., Zou, L., et al. (2020). Image-based concrete crack detection in tunnels using deep fully convolutional networks. Constr. Build. Mater. 234, 117367. doi:10.1016/j.conbuildmat.2019.117367
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). Why should i trust you?” explaining the predictions of any classifier. Proc. 22nd ACM SIGKDD Int. Conf. Knowl. Discov. data Min., 1135–1144.
Ronneberger, O., Fischer, P., and Brox, T. (2015). “U-net: Convolutional networks for biomedical image segmentation,” in International Conference on Medical image computing and computer-assisted intervention (Springer), 234–241.
Sajedi, S. O., and Liang, X. (2020). Vibration-based semantic damage segmentation for large-scale structural health monitoring. Computer‐Aided. Civ. Infrastructure Eng. 35, 579–596. doi:10.1111/mice.12523
Salehi, H., and Burgueño, R. (2018). Emerging artificial intelligence methods in structural engineering. Eng. Struct. 171, 170–189. doi:10.1016/j.engstruct.2018.05.084
Sekar, A., and Perumal, V. (2022). Cfc-gan: Forecasting road surface crack using forecasted crack generative adversarial network. IEEE Trans. Intell. Transp. Syst., 1–14. doi:10.1109/tits.2022.3171433
Shang, Z., Sun, L., Xia, Y., and Zhang, W. (2021). Vibration-based damage detection for bridges by deep convolutional denoising autoencoder. Struct. Health Monit. 20, 1880–1903.
Shi, Y., Cui, L., Qi, Z., Meng, F., and Chen, Z. (2016). Automatic road crack detection using random structured forests. IEEE Trans. Intell. Transp. Syst. 17, 3434–3445. doi:10.1109/tits.2016.2552248
Siddique, R., Aggarwal, P., and Aggarwal, Y. (2011). Prediction of compressive strength of self-compacting concrete containing bottom ash using artificial neural networks. Adv. Eng. Softw. 42, 780–786. doi:10.1016/j.advengsoft.2011.05.016
Sidorov, M., Khor, J. H., Nhut, P. V., Matsumoto, Y., and Ohmura, R. (2020). A public blockchain-enabled wireless LoRa sensor node for easy continuous unattended health monitoring of bolted joints: Implementation and evaluation. IEEE Sens. J. 20 (21), 13057–13065.
Simonyan, K., and Zisserman, A. (2014). Very deep convolutional networks for large-scale image recognition. arXiv preprint arXiv:1409.1556.
Smarsly, K., and Hartmann, D. (2007). Proceedings of the Third International Conference on Structural Engineering, Mechanics and Computation, 10. Cape Town, South Africa.Artificial intelligence in structural health monitoring
Song, H.-W., and Kwon, S.-J. (2009). Evaluation of chloride penetration in high performance concrete using neural network algorithm and micro pore structure. Cem. Concr. Res. 39, 814–824. doi:10.1016/j.cemconres.2009.05.013
Sony, S., Dunphy, K., Sadhu, A., and Capretz, M. (2021). A systematic review of convolutional neural network-based structural condition assessment techniques. Eng. Struct. 226, 111347. doi:10.1016/j.engstruct.2020.111347
Specht, D. F. (1990). Probabilistic neural networks. Neural Netw. 3, 109–118. doi:10.1016/0893-6080(90)90049-q
Sun, L., Shang, Z., Xia, Y., Bhowmick, S., and Nagarajaiah, S. (2020). Review of bridge structural health monitoring aided by big data and artificial intelligence: From condition assessment to damage detection. J. Struct. Eng. (N. Y. N. Y). 146, 04020073. doi:10.1061/(asce)st.1943-541x.0002535
Taffese, W. Z., Al-Neshawy, F., Sistonen, E., and Ferreira, M. (2015a). “Optimized neural network based carbonation prediction model,” in International symposium non-destructive testing in civil engineering (Berlin, Germany: NDT-CE), 1074–1083.
Taffese, W. Z., Sistonen, E., and Puttonen, J. (2015b). “Prediction of concrete carbonation depth using decision trees,” in Conference: 23rd European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Burges, Belgium, 415–420.
Toh, G., and Park, J. (2020). Review of vibration-based structural health monitoring using deep learning. Appl. Sci. 10, 1680. doi:10.3390/app10051680
Uysal, M., and Tanyildizi, H. (2012). Estimation of compressive strength of self compacting concrete containing polypropylene fiber and mineral additives exposed to high temperature using artificial neural network. Constr. Build. Mater. 27, 404–414. doi:10.1016/j.conbuildmat.2011.07.028
Vantage-Market-Research, V. M. R. (2022). Structural health monitoring market global size, 2022–2028. share, forecast Available at: https://www.vantagemarketresearch.com/industry-report/structural-health-monitoring-market-1115.
Wakjira, T. G., Ibrahim, M., Ebead, U., and Alam, M. S. (2022). Explainable machine learning model and reliability analysis for flexural capacity prediction of rc beams strengthened in flexure with frcm. Eng. Struct. 255, 113903. doi:10.1016/j.engstruct.2022.113903
Wang, Z., and Cha, Y.-J. (2021). Unsupervised deep learning approach using a deep auto-encoder with a one-class support vector machine to detect damage. Struct. Health Monit. 20, 406–425. doi:10.1177/1475921720934051
Wen, Y.-K. (1976). Method for random vibration of hysteretic systems. J. Engrg. Mech. Div. 102, 249–263. doi:10.1061/jmcea3.0002106
Wu, R.-T., Singla, A., Jahanshahi, M. R., Bertino, E., Ko, B. J., and Verma, D. (2019). Pruning deep convolutional neural networks for efficient edge computing in condition assessment of infrastructures. Computer‐Aided. Civ. Infrastructure Eng. 34, 774–789. doi:10.1111/mice.12449
Xiang, C., Wang, W., Deng, L., Shi, P., and Kong, X. (2022). Crack detection algorithm for concrete structures based on super-resolution reconstruction and segmentation network. Automation Constr. 140, 104346. doi:10.1016/j.autcon.2022.104346
Xu, H., Su, X., Wang, Y., Cai, H., Cui, K., and Chen, X. (2019). Automatic bridge crack detection using a convolutional neural network. Appl. Sci. 9, 2867. doi:10.3390/app9142867
Xu, J., Doyle, D., and Moreu, F. (2021a). State of the art of augmented reality (ar) capabilities for civil infrastructure applications. arXiv preprint arXiv:2110.08698.
Xu, J., Gui, C., and Han, Q. (2020). Recognition of rust grade and rust ratio of steel structures based on ensembled convolutional neural network. Computer‐Aided. Civ. Infrastructure Eng. 35, 1160–1174. doi:10.1111/mice.12563
Xu, J., Wyckoff, E., Hanson, J.-W., Moreu, F., and Doyle, D. (2021b). Implementing augmented reality technology to measure structural changes across time. arXiv preprint arXiv:2111.02555.
Xu, S., and Noh, H. Y. (2021). Phymdan: Physics-informed knowledge transfer between buildings for seismic damage diagnosis through adversarial learning. Mech. Syst. Signal Process. 151, 107374. doi:10.1016/j.ymssp.2020.107374
Yampolskiy, R. V. (2015). Artificial superintelligence: A futuristic approach. Boca Raton, FL: CRC Press.
Yan, K., and Shi, C. (2010). Prediction of elastic modulus of normal and high strength concrete by support vector machine. Constr. Build. Mater. 24, 1479–1485. doi:10.1016/j.conbuildmat.2010.01.006
Yan, K., Xu, H., Shen, G., and Liu, P. (2013). Prediction of splitting tensile strength from cylinder compressive strength of concrete by support vector machine. Adv. Mater. Sci. Eng., 1–13. doi:10.1155/2013/597257
Yang, J., Kang, G., Liu, Y., and Kan, Q. (2021). A novel method of multiaxial fatigue life prediction based on deep learning. Int. J. Fatigue 151, 106356.
Ye, X., Jin, T., and Yun, C. (2019). A review on deep learning-based structural health monitoring of civil infrastructures. Smart Struct. Syst. 24, 567–585.
Yi, T., Li, H., and Gu, M. (2010). Recent research and applications of GPS based technology for bridge health monitoring. Sci. China Technol. Sci. 53 (10), 2597–2610.
Yuan, F.-G., Zargar, S. A., Chen, Q., and Wang, S. (2020). Machine learning for structural health monitoring: Challenges and opportunitiesSensors smart Struct. Technol. Civ. Mech. Aerosp. Syst. 2020 (Bellingham, Washington: International Society for Optics and Photonics) 11379, 1137903.
Zhang, A., Wang, K. C., Li, B., Yang, E., Dai, X., Peng, Y., et al. (2017). Automated pixel-level pavement crack detection on 3d asphalt surfaces using a deep-learning network. Computer-Aided Civ. Infrastructure Eng. 32, 805–819. doi:10.1111/mice.12297
Zhang, L., Yang, F., Zhang, Y. D., and Zhu, Y. J. (2016). Road crack detection using deep convolutional neural network. In IEEE international conference on image processing (ICIP). IEEE, 3708–3712.
Zhang, R., Liu, Y., and Sun, H. (2020). Physics-informed multi-lstm networks for metamodeling of nonlinear structures. Comput. Methods Appl. Mech. Eng. 369, 113226. doi:10.1016/j.cma.2020.113226
Zhang, Z., and Sun, C. (2021). Structural damage identification via physics-guided machine learning: A methodology integrating pattern recognition with finite element model updating. Struct. Health Monit. 20, 1675–1688.
Zhou, S., and Song, W. (2020). Concrete roadway crack segmentation using encoder-decoder networks with range images. Automation Constr. 120, 103403. doi:10.1016/j.autcon.2020.103403
Keywords: structural health monitoring, artificial intelligence, machine learning, deep learning, big data analytics, autonomous inspection, smart maintenance and monitoring
Citation: Mondal TG and Chen G (2022) Artificial intelligence in civil infrastructure health monitoring—Historical perspectives, current trends, and future visions. Front. Built Environ. 8:1007886. doi: 10.3389/fbuil.2022.1007886
Received: 31 July 2022; Accepted: 31 August 2022;
Published: 23 September 2022.
Edited by:
Wei Song, University of Alabama, United StatesReviewed by:
Ramin Ghiasi, Southeast University, ChinaCopyright © 2022 Mondal and Chen. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Genda Chen, Z2NoZW5AbXN0LmVkdQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.