 Antonio Bruno1†Davide Moroni1†Riccardo Dainelli2Leandro Rocchi2Silvia Morelli3Emilio Ferrari3Piero Toscano2†Massimo Martinelli1*†
Antonio Bruno1†Davide Moroni1†Riccardo Dainelli2Leandro Rocchi2Silvia Morelli3Emilio Ferrari3Piero Toscano2†Massimo Martinelli1*†- 1Institute of Information Science and Technologies, National Research Council, Pisa, Italy
- 2Institute of BioEconomy, National Research Council, Firenze, Italy
- 3Barilla G. e R. Fratelli S.p.A., Parma, Italy
A novel method for improving plant disease classification, a challenging and time-consuming process, is proposed. First, using as baseline EfficientNet, a recent and advanced family of architectures having an excellent accuracy/complexity trade-off, we have introduced, devised, and applied refined techniques based on transfer learning, regularization, stratification, weighted metrics, and advanced optimizers in order to achieve improved performance. Then, we go further by introducing adaptive minimal ensembling, which is a unique input to the knowledge base of the proposed solution. This represents a leap forward since it allows improving the accuracy with limited complexity using only two EfficientNet-b0 weak models, performing ensembling on feature vectors by a trainable layer instead of classic aggregation on outputs. To the best of our knowledge, such an approach to ensembling has never been used before in literature. Our method was tested on PlantVillage, a public reference dataset used for benchmarking models' performances for crop disease diagnostic, considering both its original and augmented versions. We noticeably improved the state of the art by achieving 100% accuracy in both the original and augmented datasets. Results were obtained using PyTorch to train, test, and validate the models; reproducibility is granted by providing exhaustive details, including hyperparameters used in the experimentation. A Web interface is also made publicly available to test the proposed methods.
1. Introduction
Early detection of plant stress is one of the most crucial practices in agriculture (Nagaraju and Chawla, 2020). Biotic stress in plants is caused by living organisms, specifically viruses, bacteria, fungi, nematodes, insects, arachnids, and weeds, while abiotic stress is caused by environmental factors such as drought, heat, cold, strong wind, flooding, and nutrient deficiencies. In agriculture, both kinds of stress are a significant cause of crop yield and quality loss leading to serious monetary harm when limits for the occurrence of the stress are exceeded (Kashef, 2020; Pantazi et al., 2020). Although over the years, genetics has made available cultivars that are increasingly resistant to various types of stress, the issue of yield and quality losses remains crucial on a global scale, especially since climate change leads to the co-occurrence of abiotic and biotic stresses (Pandey et al., 2017). Even today, the majority of the inspections are done manually by direct visual analysis, which may not make it easy to identify the disease and its type. Indeed, farmers use their naked eyes for plant inspection, which needs constant observation, high skills, and experience. Some of them are supported by guidelines with basic concepts and aiding materials (pictures/notes to identify symptoms and patterns of stress) that are relevant to distinguish between biotic and abiotic injuries and determine the possible cause and solution to adopt. At other times, farmers might require technical support to achieve a formal and complete diagnosis. In all these cases, the methodologies adopted are time-consuming and expensive (Zhang et al., 2020), often not viable for large farms or not affordable for small farms. Even the identification of weeds typology—broadleaf or grassy—is difficult in their early stages (from germination to the development of the first four/six leaves), i.e., exactly when it would be the most suitable time to counter them. This issue has increased the importance of automated infection recognition and compelled researchers to devise methods or systems that can more accurately diagnose the problem (Ma et al., 2017). In addition, the increased public concern about environmental conservation coupled with the need for more efficient agriculture necessary to cope with the simultaneous increase in population and reduction of available land) demands the introduction of new cost-effective and sustainable methods and solutions to support farmers in their daily work. In this context, machine learning techniques can finally trigger a revolution for the timely suppression of organisms harmful to plants and keep the use of chemical treatment and other forms of intervention to economically and ecologically justified levels.
Computer vision-based methods are now being considered a key enabler in this revolution. The problem has a relatively long history, including several attempts based on the use of particular imaging technologies such as thermal and stereo images (Prince et al., 2015), color and depth images (Rousseau et al., 2012), or even fluorescence imaging spectroscopy (Wetterich et al., 2013) coupled with ad hoc image processing pipelines. Such advanced imaging modalities might provide very specific and accurate analysis suitable for particular, especially high-revenue, crops in precision agriculture. However, standard RGB images might be preferable for the broader adoption of vision-based methods for fighting plant diseases even in low-resource and low-income areas of the world. Progresses in artificial intelligence and their excellent classification capabilities on standard images have encouraged several research lines. For instance, neural networks for plant disease classification have been used before (Huang, 2007) making use in most cases of handcrafted features and conventional computer vision pipelines. Indeed, independently of the application domain, typical computer vision techniques are composed of a pipeline of phases that almost equally contribute to the quality of the final result. In the case of image classification, in particular, the phases are (i) preprocessing for improving the image quality (e.g., denoising, color enhancement/balancing); segmentation for isolating the foreground from the background, to focus only on the useful information;feature extraction for obtaining only the relevant information of the foreground represented in a numeric vector (i.e., feature vector), mostly performed by a domain expert, and (iv) classification for learning and performing a mapping between the input feature vector and output classes.
In the last years, the paradigm shift proposed by deep learning (LeCun et al., 2015), consisting of a way to perform representation learning i.e., obtaining the data feature vector without involving a domain expert, has allowed embedding and automatically performing all the phases described above.
Convolutional Neural Networks (CNNs or ConvNets) represent Deep Learning in the scope of Computer Vision and are state-of-the-art (SOTA) in most tasks (Khan et al., 2020). Even if there are many CNN archetypes, all of them are essentially composed by stacking a variable number of modules (that usually share parameters to reduce complexity) consisting of the following layers applied sequentially:
• convolutional layers: they apply several adaptive filters to regions of the image obtaining their abstract representation;
• pooling layers: they perform aggregations which have the 2-fold effect of summarizing data, picking only relevant elements, leading to dimensionality reduction;
• non-linear activation layers: they are used to obtain a more powerful and expressive representation, reaching different levels of abstraction.
At the end of an architecture composed of the layers mentioned above, one or more fully connected layers can be stacked. This organization allows automatic preprocessing, segmentation, and feature extraction whilst classification/regression is feasible, putting a dedicated output module at the top of the architecture. The very first conceived CNN was LeNet (LeCun et al., 1989) more than 30 years ago. Again, only in the last 10 years, CNNs have been experiencing massive use and success, frequently improving the SOTA on different tasks (Krizhevsky et al., 2012; Simonyan and Zisserman, 2015; Szegedy et al., 2015; He et al., 2016; Howard et al., 2017; Hu et al., 2018; Wang et al., 2020).
Convolutional Neural Networks have been adopted to tackle the problem of plant disease classifications. For instance, Wang et al. (2017) have applied transfer learning and fine-tuning of general-purpose architectures to provide fine-grained disease severity classification in the case of the apple black rot images dataset, obtaining a best 90.16% performance using VGG16. Similarly, Ferentinos (2018) used AlexNet and GoogleNet, training the models with the use of an open database of 87,848 images, containing 25 different plants in a set of 58 distinct classes of [plant, disease] pairs, achieving the best performance of 99.53%. For the training and validation of deep learning paradigms, several datasets are available (Lu and Young, 2020). However, all of them have some limitations e.g., in size, variety of plants, disease coverage, and extrinsic shooting conditions (i.e., varying illumination and backgrounds). Among them, PlantVillage (Hughes and Salathe, 2015a,b) has emerged as a de facto open reference dataset for plant disease classification and, as such, it is considered a benchmark in this article, although it shares limitations of other datasets and, notably, the presence of standard backgrounds instead of real-world ones. It should be noticed that a large-scale benchmark dataset has been recently proposed (Liu et al., 2021), together with a new approach to disease recognition. Still, such a dataset is not freely available and has not yet gained reference value. In general, previous methods addressing the classification of PlantVillage images achieve good performance, however, they often do not sufficiently address the efficiency and complexity of the employed paradigms. Indeed, in order to achieve more significant penetration and broader adoption of the methods, the proposed paradigms should be capable of running on low resource hardware, especially on smartphones, even in the absence of remote clouds.
In view of the above consideration, in this study, we propose a new approach to plant disease classification based on adaptive minimal ensembling. The main contribution is represented by a novel approach to ensembling: different weak classifiers are trained and then combined to obtain a new combined classifier. The novelties of the proposed approach are at least 2-fold: from one side, we propose a fully trainable combination layer, granting end-to-end differentiability of the global architecture; then, in our approach, the combination layer does not act on the output layers of the weak classifiers as in other classical approaches, but the weak classifiers are truncated before. Namely, the final fully-connected layers of each weak classifier are removed, and the combination happens directly at the deep feature level. In addition, such an approach is brought into practice by adopting a family of SOTA models, namely EfficientNet (Tan and Le, 2019), known for their optimal complexity/performance trade-off, for each weak classifier. EfficientNet is refined by applying advanced techniques on data and processing, significantly improving the classification task. Namely, besides using ensembling, we perform transfer learning from ImageNet and introduce a novel optimizer as well as a novel validation scheme together with other minor tricks. From an experimental point of view, the article provides an advance since it shows that adaptive minimal ensembling can be used to reach top performance with a minimal computational burden compared to other promising schemes in the literature. Indeed, improving state-of-the-art, we achieve 100% accuracy on the PlantVillage dataset using an ensembling of only two weak classifiers (and thus minimal) while at the same time requiring less computational resources than the previous methodologies tested on the PlantVillage dataset. As a final contribution, carrying out the experiments both on the original PlantVillage dataset and its augmented version, we show that our method based on minimal ensembling is less sensitive to data augmentation with respect to other methods reported in the literature, in which performance significantly drops when training is not performed on the augmented dataset.
The article is organized as follows. In Section 2, we describe our designing strategy in detail (including the proposed models and the validation phases), focusing on the novelty aspects of the solution. The experimental setup is then introduced in Section 3 in which the number and typologies of experimental runs, including hyperparameters and other details, are reported in order to guarantee reproducibility. In Section 4, the obtained experimental results are reported and discussed, while Section 5 ends the article with ideas for future research.
2. Materials and methods
Among the pool of CNN architectures available in the SOTA for image classification, it was decided to use the EfficientNet (Tan and Le, 2019) family as the core component in this study. This was motivated by several factors.
First, as the name suggests, EfficientNet improves the classification quality without having huge complexity with respect to the models having similar classification performances. EfficientNet family consists of 8 progressively improved versions (b0-b7) with limited complexity growth, all of them having the inverted bottleneck MBConv (first introduced in MobileNetV2) as the core module, which expands and compresses channels reducing the complexity of convolution. The real novelty introduced is the way EfficientNets perform scaling of the network to achieve optimal performances given a predefined complexity. In the CNN literature, there are 3 main types of scaling as shown in Figure 1:
• depth scaling, which consists in increasing the number of layers in the CNN; it is the most popular scaling method in the literature and allows to catch features at more levels of abstraction;
• width scaling means increasing the number of convolutional kernels and parameters or channels, giving the model the capability to represent different features at the same level;
• input scaling means increasing the size/resolution of the input images, allowing to capture more details.
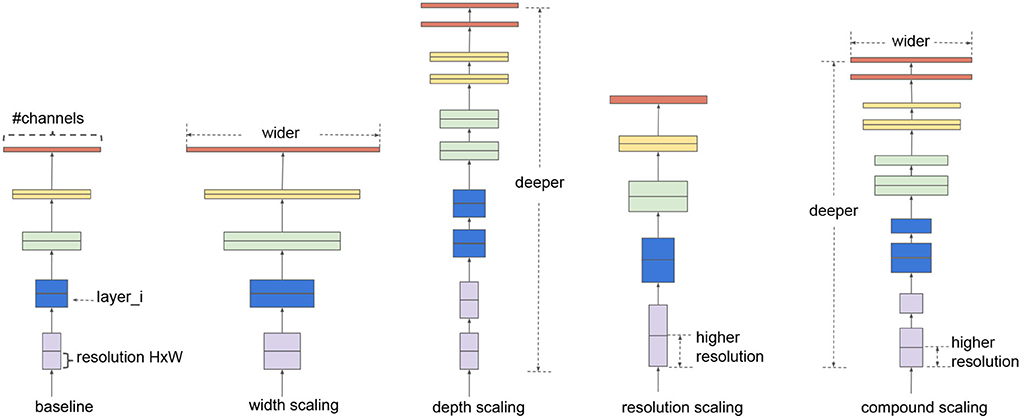
Figure 1. Example of scaling types, from left to right: a baseline network example, conventional scaling methods that only increase one network dimension (width, depth, and resolution), and in the end the EfficientNet compound scaling method that uniformly scales all three dimensions with a fixed ratio. Image taken from the original article (Tan and Le, 2019).
Each of these scalings can be set manually or by a grid search, but there are two problems with the traditional scaling method: first, they increase the model complexity, usually exponentially, with tons of new parameters to tune and, second, after a certain level, experiments show that scaling does not improve performances. The scaling method introduced in the article is named compound scaling and suggests that strategically performing all scaling together delivers better results because it is observed that they are dependent. Intuitively, Tan and Le (2019) introduce a compound coefficient ϕ representing the amount of resources available to the model and find the optimal scaling combination using that amount of resources following the rules:
In this way, the total complexity of the network is approximately proportional to 2ϕ (refer to the original article for more details). In the following sections, our strategy is illustrated, highlighting the differences from the previously cited works.
2.1. Input preprocessing
In many applications, the models are not fed directly with the images provided by the datasets, but images are preprocessed to improve the performances. In our study, since the image quality of the dataset of interest is already sufficient, we opted not to perform any image enhancement or further augmentation because an augmented version of the dataset already exists.
The only preprocessing we applied is the normalization, in order to have all data described under the same distribution (pixel values in the [0, 1] range and centered around the mean) which improves the stability and convergence of the training.
2.2. Transfer learning
Transfer learning (Weiss et al., 2016) is the technique of taking knowledge gained while solving one problem and applying it to a different but related problem. In this case, like most cases for image classification, the stored knowledge is brought by pre-trained models from ImageNet (Deng et al., 2009) task, since it has more than 14 million images belonging to 1,000 generic classes (including plants).
2.3. Avoid overfitting
In order to prevent overfitting (i.e., avoid the model being too specialized to the data from the training set with poor performances on unknown data), during training we use early stopping (i.e., training is interrupted after no improvements on the validation set after a certain number of epochs, called patience, is achieved) and regularization (i.e., adding noise to the loss, usually proportional to the norm of the model parameter vector, in order to keep parameters with low values).
2.4. Ensembling
Ensembling is the technique that combines several base models, called weak, in order to produce one optimal model to achieve a better performance than any of the constituent models alone (Opitz and Maclin, 1999). The studies (Sagi and Rokach, 2018; Dong et al., 2019) provide a comprehensive study on different ensembling methods supported by empirical results. Instead of performing a sort of validation to obtain the best combination of ensembling, we adopt the following heuristic choices:
• ensemble main category: Due to its simplicity, we decided to use bagging, which consists in training several independent weak models on different subsets of data. Since randomness (Ho, 1995) and heterogeneity (Gashler et al., 2008) are known to lead to good quality ensembling, subsets are picked totally random;
• ensemble size: The study in Bonab and Can (2016) provides the number of weak models to use for obtaining the ideal ensemble model, however, the study in Bonab and Can (2019) proves that a small number of weak models is enough to achieve high performances with low complexity. We, thus, decided to consider an ensemble size equal to 2 (i.e., the ensemble is composed of two weak models only, being therefore minimal).
• combination type: The typical way of combining weak models is to perform voting/averaging as shown in Figure 2 (predicting the output from all weak models and then picking the most frequent output/average of outputs), respectively for classification/regression. However, in previous study, the ensemble is only a static aggregator. In our method, we opted to perform an adaptive combination of the weak models; in addition, instead of combining the outputs (Figure 3) of weak models, the features that the CNNs extract from the input (Figure 4) are combined. In this way, the complexity of the ensemble is further reduced without diminishing its power and expressiveness. Indeed the combination layer is of the same type of the output layer as the weak models (i.e., Linear + LogSoftmax) and keeping both would introduce an unnecessary redundancy. In particular, the mechanism adopted for the fusion of the ensemble is performed first by concatenating the characteristics and then applying a linear transformation to match the output size (i.e., we perform a kind of weighted sum on the concatenated features).
• weak models training: Even if the study in Sollich and Krogh (1995) shows that overfitted weak models might also lead to a good adaptive ensemble, we decided to train the weak models by avoiding overfitting to save precious training time and to have weak models of higher quality.
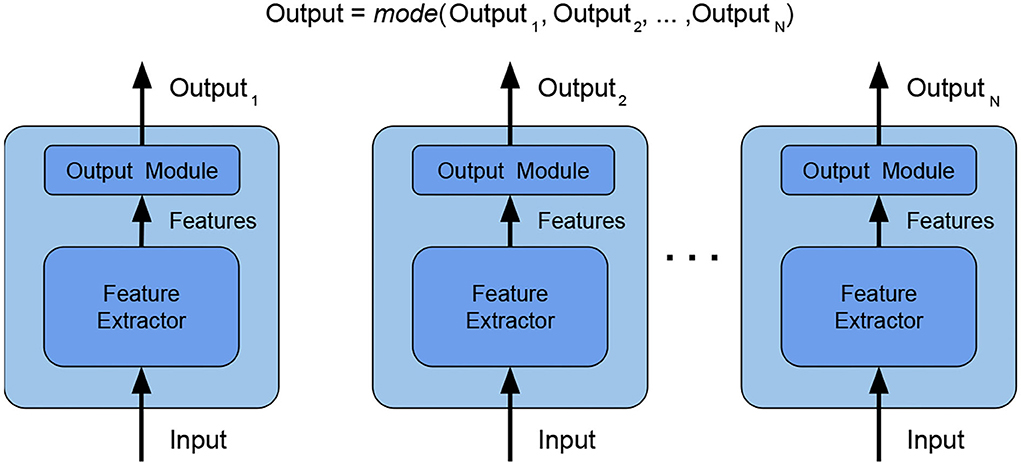
Figure 2. Ensemble by voting—the final label is obtained by picking the most frequent label among the weak models. In this way, the weak models are independent and the ensemble is effective with a high number of heterogeneous weak models. Weak models are CNN architectures since now represented by the sequence of Feature Extractor + Output module.
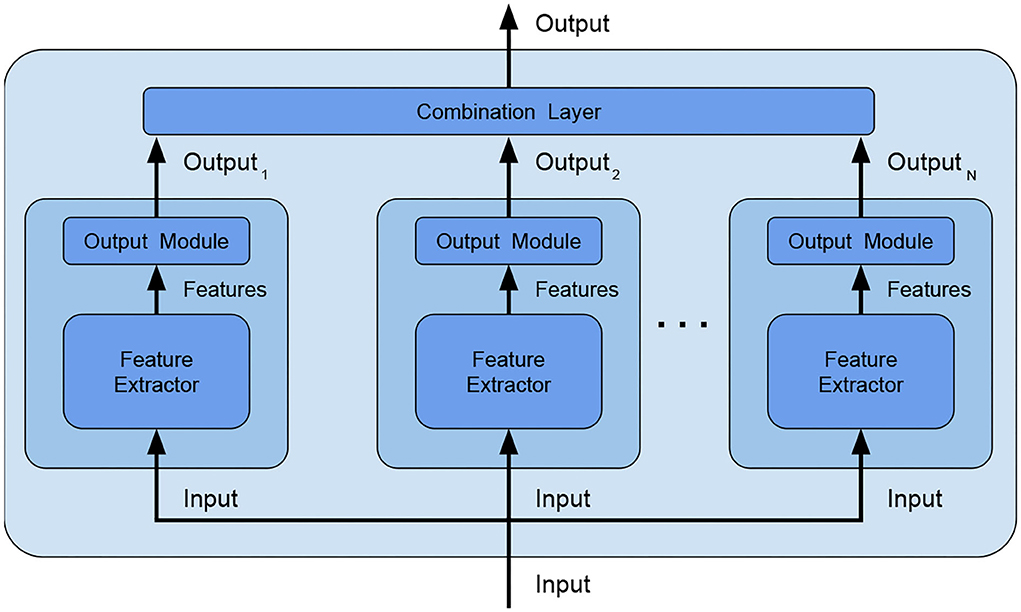
Figure 3. Ensemble by output combination–an additional combination layer is fed with the outputs of the weak models and combines them, in this way, the weak models are no longer independent and the combination layer can be trained to better adapt to data.
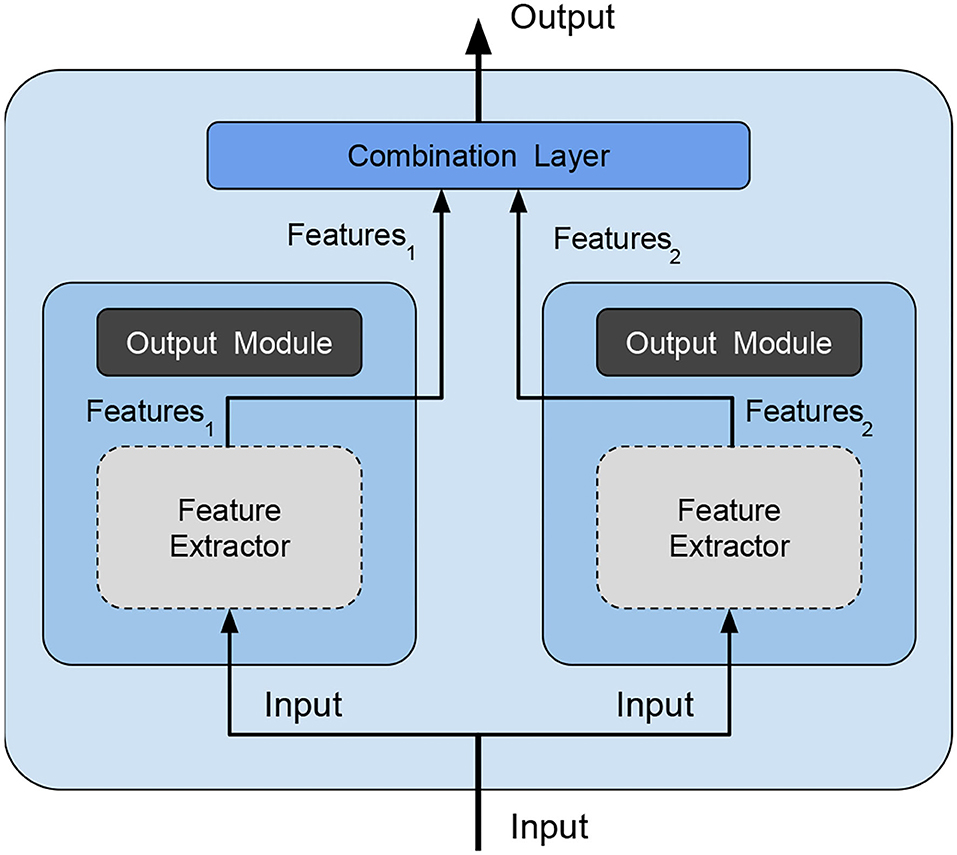
Figure 4. Our ensemble method—is an optimized version of the method shown in Figure 3 because we avoid redundancy and reduce complexity by deleting the output module (dark gray filled) of weak models and feeding the combination layer directly with the features extracted by each weak model. Feature extraction modules (light gray filled with dashed borders) have the parameters frozen during ensemble training.
2.5. Validation phases
The validation of every single model is divided into two main phases: first end-to-end training is performed and then followed by output module fine-tuning. For the first phase, transfer learning starting from the ImageNet pre-trained model is applied, introducing a new output module to adjust the output size from the 1,000 classes in the ImageNet task to the number of classes in the PlantVillage dataset. A training phase is performed using AdaBelief (Zhuang et al., 2020) optimizer which guarantees both fast convergence and generalization. The parameters used in AdaBelief are the default ones, i.e., learning rate equal to 5·10−4, betas (0.9, 0.999), eps 10−16, using weight decoupling without rectifying. After such training is concluded, the second phase starts: all the internal layers (i.e., the layers performing feature extraction) of the model obtained with the previous step are frozen, and a new training by Stochastic Gradient Descent (SDG) with a learning rate 3·10−3 and momentum 0.9 is performed. This leads to the fine-tuning of the output module of each classifier.
These steps conclude the validation phase for every single model. When going further to ensembling, each resulting single model is regarded as a weak model of a combined classifier and an additional dedicated pipeline is introduced for training the ensemble. First, the two best performing models are selected and truncated dropping their output module, which is replaced by a common combination layer. Then, ensemble fine-tuning (i.e., only the adaptive combination layer is trained) is performed using the same optimizer setting of the first validation phase. The reasons why we perform a dedicated pipeline for the ensemble are described in Section 3.3.
2.6. The plantVillage dataset
The PlantVillage dataset (Hughes and Salathe, 2015a,b) is a dataset for multiclass image classification tasks having 55,448 images (61.486 in its augmented version) divided into 39 classes representing background-only (out of domain images e.g., animals, buildings), healthy and diseased plants.
Table 1 shows that images span 14 plant species: Apple, Blueberry, Cherry, Corn, Grape, Orange, Peach, Bell Pepper, Potato, Raspberry, Soybean, Squash, Strawberry, and Tomato and contains images of 17 fungal diseases, 4 bacterial diseases, 2 mold (Oomycete) diseases, 2 viral diseases, and 1 disease caused by a mite (some examples are shown in Figure 5).
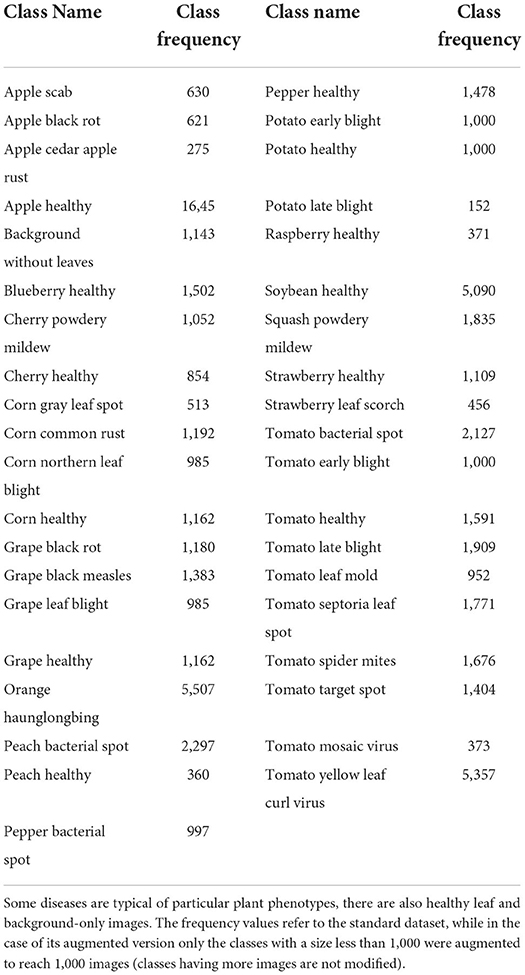
Table 1. Class labels distribution of PlantVillage dataset.

Figure 5. Some PlantVillage image examples. From top to bottom: 3 examples of background, 3 examples of healthy leaves, and 3 examples of diseases.
3. Experimental setup
In this section, we describe the design choices justified by prior observations. All the reported experimental results were obtained using the PyTorch (Paszke et al., 2019) open-source machine learning framework.
A somewhat non-conventional training/validation/test splitting has been used in the experiments to reproduce the conditions closest to the study in Ümit Atila et al. (2021) representing the SOTA for PlantVillage while doing this work. More in detail, datasets have been split into training (90%), validation (7%), and test (3%). While obviously splits have the same sizes as previous articles, however, since the picks are random, the actual elements in each subset may vary. Moreover, we performed stratification (i.e., preserving the classes ratio). Besides the non-conventional split, in the result and discussion section, a classic split is also considered to show the suitability of our strategy also in this case.
3.1. Loss and metrics
Training Loss: Due to the multiclass nature of the problem, the Cross-Entropy Loss (which exponentially penalizes differences between predicted and true values, expressed as the probability of class belonging) is used. For this reason, the model output has a size of 39 (i.e., number of classes), and each element output[i] represents the probability that the input model belongs to class i.
Validation and test metrics: For the validation set evaluation, we decided to use the Weighted F1-score because this takes into account both correct and wrong predictions (true/false positive/negative) and weighting allows us to manage any imbalance of the classes (more representative classes have a greater contribution). On the other hand, in order to compare our results with previous studies, we used accuracy to evaluate the test set.
3.2. Hyperparameters
In order to save time, after an initial coarse search, we fixed some hyperparameters:
• Early-stopping patience set at 10: Because deep models have relatively fast convergence and they usually start overfitting after convergence, so there is no need to have much patience;
• Batch size set at 32: Because it is the maximum size allowed on the GPUs we used to perform model training and lower values showed no improvement (and would make training slower). Stratification even inside the batches would have been desirable but this is possible only if the batch size is greater than the number of the classes, which is not our case;
• Input image size fixed to 256: In order to preserve input image quality, a larger size would ruin the images, the lower size would reduce details;
• Mean and SD used for normalization:
Moreover, we observed that regularization was not needed during the end-to-end training phase, and, in some cases, it even led to worse results. Regularization is then used only in weak models (not used for ensemble) fine-tuning step, with the following hyperparameters:
• regularization type: Lasso (L1), Ridge (L2)
• regularization factor (λ): 0, 10−4, 5·10−4, 10−3.
For each combination, we used 3 different random seeds in order to obtain different model parameter initialization values, and different train/valid/test splits (useful to obtain random heterogeneous weak models for ensemble).
Considering each dataset, we had the following combinations:
• End-to-end phase: 8 (EfficientNet architectures ranging from b0 to b7) × 3 (random seeds) = 24 combinations;
• Fine-tuning phase: 24 (end-to-end phase results) × 2 (regularization types) × 4 (regularization factors) = 192 combinations;
Since there are two datasets (standard, augmented), the total number of runs is equal to 2 × (192) = 384, excluding ensembling which is addressed in Section 3.3 below.
3.3. Adaptive minimal ensembling, improving performances with minimum complexity
The last experimental step is to evaluate the performance of ensembling. We opted to perform this step using only EfficientNet-b0 as weak models and not the full family of weak models trained in Section 3.2. This choice was motivated by two observations: first of all, the performances of all EfficientNet variants after the end-to-end phase are very similar as we show in Table 2, but the b0 variant is much simpler (≈ 5M parameters vs ≈ 66.7M parameters of b7), so we decided to investigate on the simplest type of ensemble, even in terms of the number of parameters (and not just in terms of ensemble size using only 2 weak models). Moreover, we skipped the fine-tuning phase as it is used to optimize those parameters that are removed during ensembling because they are redundant (notice, however, that we performed fine-tuning anyway before, in order to collect experimental results to allow fair comparison and show the improvements ensembling can offer over single models). For the ensemble phase, we followed another validation scheme that is, for each version of the dataset, the following:
1. Five end-to-end training of EfficientNet-b0 with different initializations and data splits results in Table 3;
2. No fine-tuning because the parameters involved in this phase would be removed during ensemble;
3. Five fine-tuning of a minimal ensemble composed of the two best weak models obtained at point 1, using different initializations and data splits.
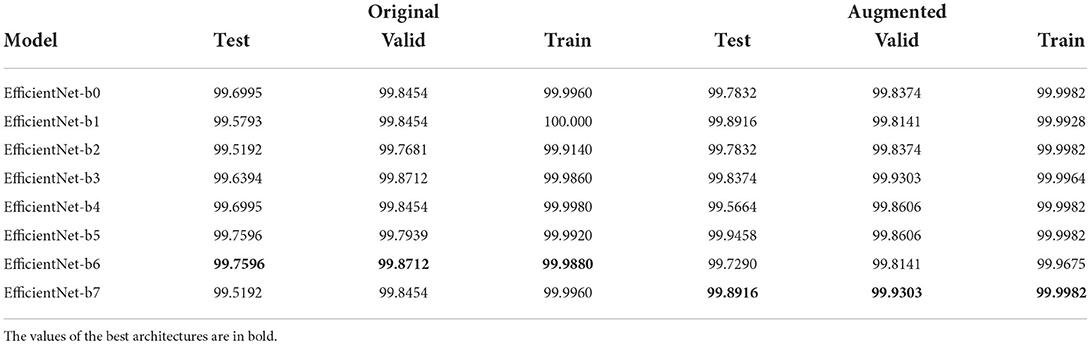
Table 2. Table with best Weighted F1-score results, for each EfficientNet variant, after the first phase of validation (i.e., end-to-end training).
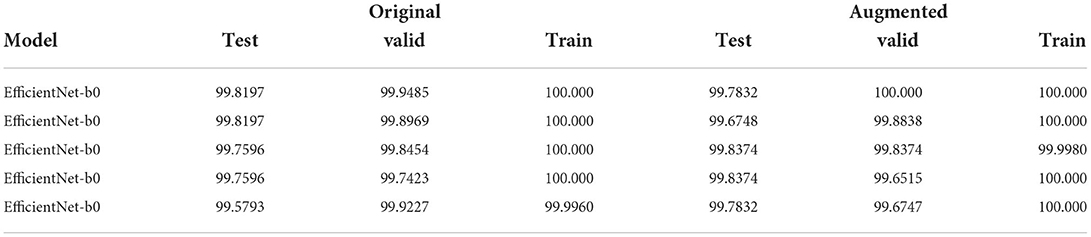
Table 3. Table with Weighted F1-score of the models (best to worst) of the 5 end-to-end training runs using EfficientNet-b0 variants only that will be the weak models of the simplest ensemble.
In this way, only 10 runs per dataset are performed, which are drastically fewer than 192 as described in Section 3.2 and every run is much faster. All training runs had the same configuration: AdaBelief optimizers with a learning rate 5·10−4, betas (0.9, 0.999), eps 10−16, using weight decoupling without rectifying, and Weighted F1-score as validation metric.
It must be noted that using different seeds for each validation phase, both for end-to-end and for ensemble fine-tuning, produces different dataset splits: this can be, therefore, viewed as cross-validation and, by averaging the values in Table 4, we obtain the same results proving that our solution is consistent.
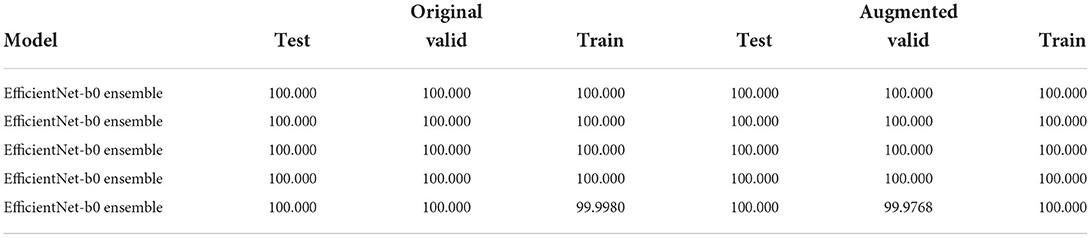
Table 4. Table with the Weighted F1-score of the 5 ensemble runs (best to worst) composed of the two best EfficientNet-b0 variants.
4. Results and discussion
Every validation step results in incremental improvements: We discuss them one by one in the following.
End-to-end phase: as shown in Table 2 results are very similar, moreover considering both datasets there is no architecture being always the best/worst in both cases. It is also important to say that already in this phase we improved the SOTA: indeed, the best results until this study were obtained by Ümit Atila et al. (2021) with a Validation Accuracy of 97.62% and Test Accuracy of 98.31% for the standard dataset, Validation Accuracy of 98.97% and Test Accuracy of 99.38% for the augmented dataset. We relate this improvement to our design choices: AdaBelief optimizer, performing stratification during dataset, using Weighted F1-score as validation metric, and using normalization parameters taken from datasets instead of ImageNet defaults.
Fine-tuning phase: As shown in Table 5, EfficientNet-b7 is the best architecture in both datasets. In major cases, this phase led to no improvements, in a few cases, it improves performances on training data without getting worse on validation/test (i.e., improvements without overfitting). The improvements are more noticeable for the standard dataset (because in the first phase, results were lower), especially for the b7 variant obtaining improvements overall. We observed no differences among different regularization types and factors, but it was needed (because with λ = 0, we got no improvements).
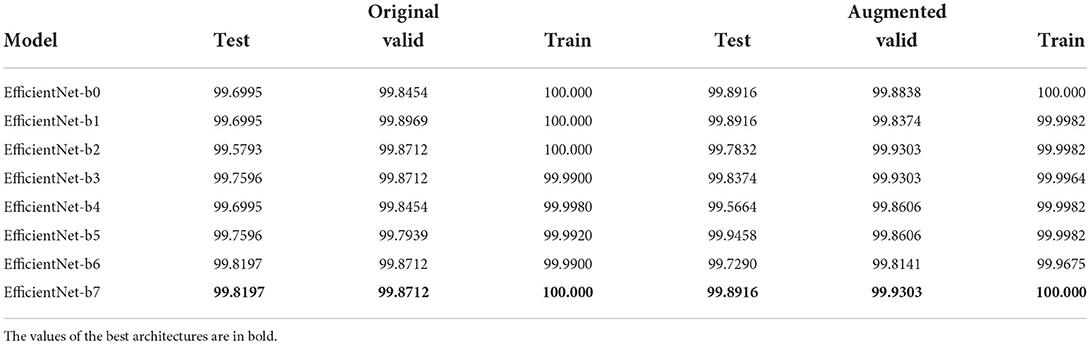
Table 5. Table with best Weighted F1-score results, for each EfficientNet variant, after the second phase of validation (i.e., end-to-end training + fine-tuning).
Ensemble: This phase gave a huge peak of improvement in both datasets, obtaining a perfect 100% accuracy on both versions of the dataset (Table 4) being much less complex (10M vs. 66.7M total parameters of EfficientNet-b7 as shown in Table 6).
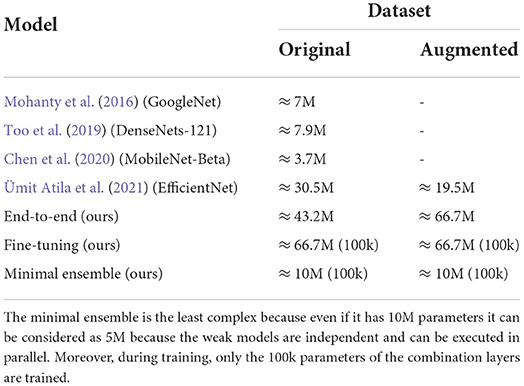
Table 6. Table comparing complexity (measured as the number of parameters) of the SOTA models on PlantVillage task.
We finally summarize the design choices and the improvements they led to.
Transfer learning: Helped to speed up and optimize (because training from scratch done in the preliminary analysis always led to poor results) the end-to-end training phase;
Adabelief optimizer: Allowed to reach lower minimal points due to its high convergence speed without losing generalization power (previous SOTA work used Adam);
Stratification and weighted F1-score: Reduced the problems due to high data imbalance, indeed in the augmented dataset, there is less imbalance and with the same condition, there are better performances on it (previous SOTA work used normal accuracy);
Regularization: Harmful during end-to-end training but essential during fine-tuning, even if there is no seeming difference among regularization types or factors (previous SOTA work does not seem to use regularization);
Ensembling: Using two weak models is enough to have meaningful improvements if the models are heterogeneous enough (i.e., trained on different subsets of data) even if they are very simple. This avoids overfitting since the training of weak models increased the base quality and reduced overall execution time. Finally, performing ensembling on features instead of outputs further reduced the complexity and deleted redundancies.
Now, we consider the comparison between our solution and the models representing the SOTA on the PlantVillage task over the years: Tables 6, 7 show that our design choices, different from previous studies (i.e., AdeBelief optimizer, stratification, weighted-F1, regularization) improved performances if we consider single models. Our minimal ensemble method introduced in this study had a 2-fold improvement: perfect accuracy score without increasing model complexity. Moreover, the feature extractor modules are frozen making the real trainable parameters number very low even in the ensemble (100k trainable parameters over the 10M in total), and the execution of weak models can be performed in parallel since they are independent (thus, the execution time for a 10M parameters ensemble is close to the execution time of a single 5M parameters model).
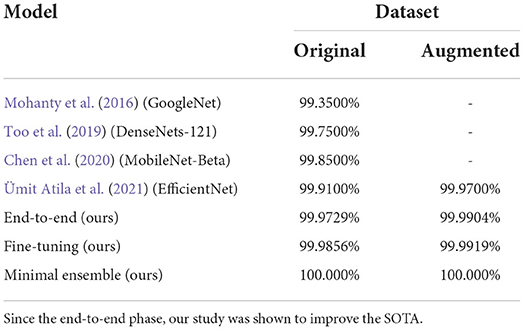
Table 7. Table comparing accuracies (measured as correct prediction over the whole dataset) of the SOTA models on the PlantVillage task.
As said before, we performed a split to make a fair comparison with the SOTA (i.e., 90% train, 7% validation, and 3% test). However, to prove its robustness, our solution has also been tested using a traditional 80/10/10 split: Few weak models were trained and then two best were used to run some ensemble fine-tuning, for each dataset version. The results in Table 8 prove that our solution is suitable also for traditional data splits.

Table 8. Table showing the accuracies of the two weak models and the fine-tuning ensembling them, using a traditional 80/10/10 split.
A web application was also implemented to show the results, allowing to pick an image from the datasets and showing its classification and probabilities; this is publicly accessible at the following address: http://plantvillage.isti.cnr.it:9090.
5. Conclusion
Identifying plant diseases and devising optimal adaptive countermeasures can bring significant improvement in crop quality and yields. In this context, expert systems based on artificial intelligence can be a valid aid to farmers, yet there are still no operational services for most crops. This article contributed to the creation of artificial intelligence modules for plant disease classification with high accuracy and efficiency. Indeed, it has been described how specific target design choices can lead to a relevant performance improvement over an already top-rated solution without efficiency loss. The first improvement of the state of the art was reached by using a different optimizer (i.e., Adabelief) in combination with techniques to deal with unbalanced data (i.e., stratification and Weighted F1-score). A family of classifiers based on the EfficientNet architecture has been proposed with similar accuracy but increasing complexity.
The second gain in performance was obtained by introducing a minimal adaptive ensemble model using the combination of the features of the two least complex weak models: while the number of total parameters doubled with respect to the least complex model, perfect accuracy was achieved. To the best of our knowledge, none of the above-mentioned techniques have been ever used before. Doubling the number of total parameters, however, did not increase the total complexity for two reasons: First, only a tiny part of parameters is trained during the ensemble training step (100k over 10M), and, second, the weak models can process input in parallel (therefore, the overall execution time is very close to the execution time of a single weak model). In addition, by minimal ensembling, the performance gap between original and augmented datasets is reduced; it could be argued that this type of ensembling can be helpful in cases where data balancing and augmentation are not feasible or not convenient in terms of computational time/resources. These perspectives will be studied in the future, considering other disparate domains and reference benchmarking datasets. In particular, we are currently investigating the use of adaptive minimal ensembling and the gains it is possible to achieve both in absolute average precision and in the ratio between precision and complexity, toward more sustainable use of artificial intelligence.
Regarding the precision agriculture domain, having achieved top performance on the de facto benchmarking dataset, the research will pursue the possibility to provide operational services to farmers to identify and recognize plant diseases. To this end, a participatory approach is being followed to gather a large dataset in the specific domain of durum wheat crop culture from pictures taken in the field by farmers, also using mobile devices. This initiative is leading to a realistic and more complex dataset to champion the methods proposed in this article.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
All the authors contributed to this article that was coordinated by PT and MM. The data analysis and the experiments were done and manuscript was written by AB, DM, and MM. The article drafting was done by AB, DM, PT, and MM. All the authors revised the manuscript several times and approved the article.
Funding
This study was partially supported by the Barilla Agrosatplus research project DBA.AD001.034.
Acknowledgments
The authors wish to thank various colleagues for their contributions to this study: Simone Agostinelli, Paolo La Cava, Rolando Maglione, Enrico Polverigiani, Gustavo Savino, and Marco Silvestri for their very valuable technical support, patient guidance, and useful critiques of this research work. The authors are also particularly grateful to Ovidio Salvetti for his useful and constructive recommendations and enthusiastic encouragement on this project.
Conflict of interest
Authors SM and EF are employed by Barilla G. e R. Fratelli S.p.A.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Bonab, H., and Can, F. (2019). Less is more: A comprehensive framework for the number of components of ensemble classifiers. IEEE Trans. Neural Netw. Learn. Syst. 30, 2735–2745. doi: 10.1109/TNNLS.2018.2886341
Bonab, H. R., and Can, F. (2016). “A theoretical framework on the ideal number of classifiers for online ensembles in data streams,” in Proceedings of the 25th ACM International on Conference on Information and Knowledge Management, CIKM '16 (New York, NY: Association for Computing Machinery), 2053–2056.
Chen, J., fu Zhang, D., and Nanehkaran, Y. A. (2020). Identifying plant diseases using deep transfer learning and enhanced lightweight network. Multimedia Tools Appl. 79, 31497–31515. doi: 10.1007/s11042-020-09669-w
Deng, J., Dong, W., Socher, R., Li, L., Kai, L. I., and Li, F. F. (2009). “Imagenet: a large-scale hierarchical image database,” in 2009 IEEE Conference on Computer Vision and Pattern Recognition (Miami, FL: IEEE), 248–255.
Dong, X., Yu, Z., Cao, W., Shi, Y., and Ma, Q. (2019). A survey on ensemble learning. Front. Comput. Sci. 14, 241–258. doi: 10.1007/s11704-019-8208-z
Ferentinos, K. P. (2018). Deep learning models for plant disease detection and diagnosis. Comput. Electron. Agric. 145, 311–318. doi: 10.1016/j.compag.2018.01.009
Gashler, M., Giraud-Carrier, C., and Martinez, T. (2008). “Decision tree ensemble: small heterogeneous is better than large homogeneous,” in 2008 Seventh International Conference on Machine Learning and Applications (New York, NY), 900–905.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). “Deep residual learning for image recognition,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Las Vegas, NV: IEEE), 770–778.
Ho, T. K. (1995). “Random decision forests,” in Proceedings of the Third International Conference on Document Analysis and Recognition, Vol. 1, ICDAR '95 (Montreal, QC: IEEE Computer Society), 278.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., et al. (2017). Mobilenets: efficient convolutional neural networks for mobile vision applications. arXiv preprint arXiv:1704.04861. doi: 10.48550/arXiv.1704.04861
Hu, J., Shen, L., and Sun, G. (2018). “Squeeze-and-excitation networks,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (Salt Lake City, UT: IEEE), 7132–7141.
Huang, K.-Y. (2007). Application of artificial neural network for detecting phalaenopsis seedling diseases using color and texture features. Comput. Electron. Agric. 57, 3–11. doi: 10.1016/j.compag.2007.01.015
Hughes, D., and Salathe, M. (2015b). An open access repository of images on plant health to enable the development of mobile disease diagnostics. arXiv preprint arXiv:1511.08060.
Hughes, D. P., and Salathe, M. (2015a). An open access repository of images on plant health to enable the development of mobile disease diagnostics through machine learning and crowdsourcing. CoRR, abs/1511.08060.
Kashef, R. (2020). Adopting Big Data Analysis in the Agricultural Sector: Financial and Societal Impacts. Singapore: Springer Singapore.
Khan, A., Sohail, A., Zahoora, U., and Qureshi, A. S. (2020). A survey of the recent architectures of deep convolutional neural networks. Artif. Intell. Rev. 53, 5455–5516. doi: 10.1007/s10462-020-09825-6
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Imagenet classification with deep convolutional neural networks. Commun. ACM. 60, 84–90. doi: 10.1145/3065386
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learning. Nature 521, 436–444. doi: 10.1038/nature14539
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard, R. E., Hubbard, W., et al. (1989). Backpropagation applied to handwritten zip code recognition. Neural Comput. 1, 541–551. doi: 10.1162/neco.1989.1.4.541
Liu, X., Min, W., Mei, S., Wang, L., and Jiang, S. (2021). Plant disease recognition: a large-scale benchmark dataset and a visual region and loss reweighting approach. IEEE Trans. Image Process. 30, 2003–2015. doi: 10.1109/TIP.2021.3049334
Lu, Y., and Young, S. (2020). A survey of public datasets for computer vision tasks in precision agriculture. Comput. Electron. Agric. 178, 105760. doi: 10.1016/j.compag.2020.105760
Ma, J., Du, K., Zhang, L., Zheng, F., Chu, J., and Sun, Z. (2017). A segmentation method for greenhouse vegetable foliar disease spots images using color information and region growing. Comput. Electron. Agric. 142, 110–117. doi: 10.1016/j.compag.2017.08.023
Mohanty, S. P., Hughes, D. P., and Salath,é, M. (2016). Using deep learning for image-based plant disease detection. Front. Plant Sci. 7, 1419. doi: 10.3389/fpls.2016.01419
Nagaraju, M., and Chawla, P. (2020). Systematic review of deep learning techniques in plant disease detection. Int. J. Syst. Assurance Eng. Manag. 11, 547–560. doi: 10.1007/s13198-020-00972-1
Opitz, D. W., and Maclin, R. (1999). Popular ensemble methods: An empirical study. J. Artif. Intell. Res. 11, 169–198. doi: 10.1613/jair.614
Pandey, P., Irulappan, V., Bagavathiannan, M. V., and Senthil-Kumar, M. (2017). Impact of combined abiotic and biotic stresses on plant growth and avenues for crop improvement by exploiting physio-morphological traits. Front Plant Sci. 8, 537. doi: 10.3389/fpls.2017.00537
Pantazi, X. E., Moshou, D., and Bochtis, D. (2020). “Chapter 3-utilization of multisensors and data fusion in precision agriculture,” in Intelligent Data Mining and Fusion Systems in Agriculture, eds X. E. Pantazi, D. Moshou, and D. Bochtis (Cambridge, MA: Academic Press), 103–173.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J., Chanan, G., et al. (2019). “Pytorch: an imperative style, high-performance deep learning library,” in Advances in Neural Information Processing Systems 32, eds H. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alché-Buc, E. Fox, and R. Garnett (Red Hook, NY: Curran Associates, Inc.), 8024–8035.
Prince, G., Clarkson, J. P., Rajpoot, N. M., et al. (2015). Automatic detection of diseased tomato plants using thermal and stereo visible light images. PLoS ONE 10, 1–20. doi: 10.1371/journal.pone.0123262
Rousseau, D., Lucidarme, P., Bertheloot, J., Caffier, V., Morel, P., Chapeau-Blondeau, F., et al. (2012). On the use of depth camera for 3d phenotyping of entire plants.
Sagi, O., and Rokach, L. (2018). Ensemble learning: a survey. Wiley Interdisc. Rev. 8, e1249. doi: 10.1002/widm.1249
Simonyan, K., and Zisserman, A. (2015). “Very deep convolutional networks for large-scale image recognition,” in International Conference on Learning Representations (San Diego, CA).
Sollich, P., and Krogh, A. (1995). “Learning with ensembles: how over-fitting can be useful,” in Proceedings of the 8th International Conference on Neural Information Processing Systems, NIPS'95 (Cambridge, MA: MIT Press), 190–196.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., et al. (2015). “Going deeper with convolutions,” in Computer Vision and Pattern Recognition (CVPR).
Tan, M., and Le, Q. (2019). “EfficientNet: Rethinking model scaling for convolutional neural networks,” in Proceedings of the 36th International Conference on Machine Learning, volume 97 of Proceedings of Machine Learning Research, eds K. Chaudhuri and R. Salakhutdinov (Long Beach, CA: PMLR), 6105–6114.
Too, E. C., Yujian, L., Njuki, S., and Yingchun, L. (2019). A comparative study of fine-tuning deep learning models for plant disease identification. Comput. Electron. Agric. 161, 272–279. doi: 10.1016/j.compag.2018.03.032
Ümit Atila Uçar, M., Akyol, K., and Uçar, E. (2021). Plant leaf disease classification using efficientnet deep learning model. Ecol. Inform. 61, 101182. doi: 10.1016/j.ecoinf.2020.101182
Wang, G., Sun, Y., and Wang, J. (2017). Automatic image-based plant disease severity estimation using deep learning. Comput. Intell. Neurosci. 2017, 2917536. doi: 10.1155/2017/2917536
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., Zhao, Y., et al. (2020). Deep high-resolution representation learning for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 43, 3349–3364. doi: 10.1109/TPAMI.2020.2983686
Weiss, K., Khoshgoftaar, T., and Wang, D. (2016). A survey of transfer learning. J. Big Data 3, 9. doi: 10.1186/s40537-016-0043-6
Wetterich, C. B., Kumar, R., Sankaran, S., Junior, J. B., Ehsani, R., and Marcassa, L. G. (2013). “A comparative study on application of computer vision and fluorescence imaging spectroscopy for detection of citrus huanglongbing disease in usa and Brazil,” in Laser Science (Orlando, FL: Optical Society of America), JW3A-26.
Zhang, N., Yang, G., Pan, Y., Yang, X., Chen, L., and Zhao, C. (2020). A review of advanced technologies and development for hyperspectral-based plant disease detection in the past three decades. Remote Sens. 12, 19. doi: 10.3390/rs12193188
Keywords: plant diseases, image classification, deep learning-artificial neural network (DL-ANN), adaptive ensemble, Convolutional Neural Networks (CNN)
Citation: Bruno A, Moroni D, Dainelli R, Rocchi L, Morelli S, Ferrari E, Toscano P and Martinelli M (2022) Improving plant disease classification by adaptive minimal ensembling. Front. Artif. Intell. 5:868926. doi: 10.3389/frai.2022.868926
Received: 08 February 2022; Accepted: 03 August 2022;
Published: 08 September 2022.
Edited by:
Ian Stavness, University of Saskatchewan, CanadaReviewed by:
Mario Merone, Campus Bio-Medico University, ItalyMichael Pound, University of Nottingham, United Kingdom
Dmitry Murashov, Federal Research Center Computer Science and Control (RAS), Russia
Copyright © 2022 Bruno, Moroni, Dainelli, Rocchi, Morelli, Ferrari, Toscano and Martinelli. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Massimo Martinelli, massimo.martinelli@isti.cnr.it
†These authors have contributed equally to this work