 Shayan Ghiasvand
Shayan Ghiasvand Wen-Fang Xie
Wen-Fang Xie Abolfazl Mohebbi
Abolfazl Mohebbi- 1Department of Mechanical, Industrial and Aerospace Engineering, Concordia University, Montréal, QC, Canada
- 2Department of Mechanical Engineering, Polytechnique Montréal, Montréal, QC, Canada
In response to the costly and error-prone manual satellite tracking on the International Space Station (ISS), this paper presents a deep neural network (DNN)-based robotic visual servoing solution to the automated tracking operation. This innovative approach directly addresses the critical issue of motion decoupling, which poses a significant challenge in current image moment-based visual servoing. The proposed method uses DNNs to estimate the manipulator’s pose, resulting in a significant reduction of coupling effects, which enhances control performance and increases tracking precision. Real-time experimental tests are carried out using a 6-DOF Denso manipulator equipped with an RGB camera and an object, mimicking the targeting pin. The test results demonstrate a 32.04% reduction in pose error and a 21.67% improvement in velocity precision compared to conventional methods. These findings demonstrate that the method has the potential to improve efficiency and accuracy significantly in satellite target tracking and capturing.
1 Introduction
In spite of the technological advancements of the International Space Station (ISS), capturing incoming satellites using Canadarm2 relies heavily on manual operations. This process involves a complex interaction with the grapple fixture (Figure 1), designed for secure connection with the Canadarm21. Astronauts, leveraging their training and visual cues, manually align and operate the robotic arm to successfully capture and berth these satellites.
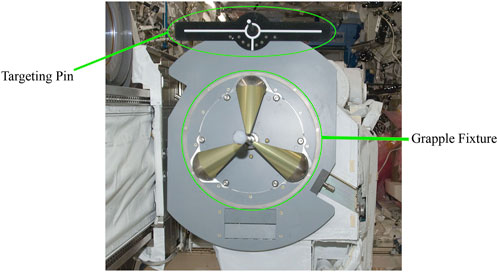
Figure 1. The grapple fixture and the 3D targeting pin on a servicing satellite2.
The manual process is highly dependent on the skill and operation precision of the astronauts. Human error, inherent in any manual operation, poses significant risks in the high-stakes environment of space. Misalignment, even minor ones, can lead to mission-critical failures, jeopardizing expensive equipment and the overall success of the operation. Furthermore, the extensive training and resources required for astronauts to perform these tasks represent a significant financial and logistical investment.
Automation has proven to be an important response to the aforementioned risks associated with the manual satellite capture processes. Unlike conventional methods that rely on detailed pose information for the precise control of robot end-effectors (EE), such as kinematic modelling (Jafarinasab et al., 2019), and trajectory planning (Herrera-Aguilar and Sidobre, 2006), Image-based Visual Servoing (IBVS) method demonstrated its efficacy by obviating the need for a prior knowledge of poses. This characteristic of IBVS is particularly advantageous because it avoids the tedious task of pose estimation. Another noteworthy aspect of IBVS is its eye-in-hand configuration, a configuration that mirrors the existing setup on the Canadarm2 (Chang and Evans, 2009). This setup is compatible with the operational requirements of capturing satellites, where the capturing device must adjust its position and orientation in real-time based on the visual input from the target satellite. Furthermore, IBVS has been acknowledged for its robust performance in unstructured environments (Ahlin et al., 2016). The unpredictable and dynamically changing nature of space, with no structured environment, requires a flexible and adaptive approach such as IBVS. For instance, Shi et al. (2012) proposed a visual servoing approach (switching between IBVS and position-based visual servoing (PBVS)) for a space robot to capture a cooperative target. However, this approach is limited by its requirement for binocular vision, which makes it unsuitable for the Canadarm2 equipped with one camera. In addition, the low frame rate of four frames per second (FPS) presented in their work may reduce the accuracy required for successful target tracking.
In IBVS, the selection of an effective set of image features
The matrix
The commonly used image features are the coordinates of points, straight lines or ellipses in the image plane. However, they are restricted to a limited set of objects (Khiabani et al., 2019), and they may easily get out of the field of view (FOV) during servoing, and losing any of the features would cause a failure in the visual servoing. To tackle these issues, several researchers have proposed to use image moments derived from the regions of the image (Huang et al., 2022; Shaw et al., 2016; Li et al., 2015; Zhou et al., 2021), allowing for the representation of arbitrary object shapes (He et al., 2019). It is worth noting that an ideal image feature would associate uniquely with the motion in a single DOF, leading to minimal interference among the motions in other DOFs. In other terms, the interaction matrix derived from the ideal image features will be an identity matrix (He et al., 2019).
Nevertheless, as highlighted in both Tahri and Chaumette (2005) and Chaumette (2004), it is challenging to achieve an ideal interaction matrix (identity matrix) due to inherent nonlinearities in Equation 3. To solve this problem, researchers have sought two kinds of image features to achieve decoupling among the 6 DOFs, (i) Analytical function-based image features (Huang et al., 2022; Wu et al., 2018; Liu et al., 2009) and (ii) Data-driven features (Quaccia et al., 2024; Zhou et al., 2021; Zhao et al., 2012).
In the analytical function-based image features, the objective is to create an analytical function corresponding to a motion in specific DOF. These analytical functions are derived from image moments and are ideally invariant to other DOFs, so they can accurately represent their corresponding specific motion. The pioneering work in this area by Chaumette (2004) presented an analytical basis for image feature functions. Chaumette’s approach used the object’s centroid to infer
Subsequent studies have attempted to resolve these couplings. For instance, Tahri and Chaumette (2005) used normalization techniques to mitigate the coupling effects within the translational DOFs. However, fully decoupled features remained unattainable. In the search for shape-independent rotational features, Tamtsia et al. (2013) proposed the features based on shifted moments with invariant properties for both symmetric and asymmetric objects. Although their approach was robust to some extent, it did not fully solve the decoupling problem between
The research work by Liu et al. (2009) further decoupled the problematic rotational features and performed well in practice but lacked generalizability as it distinctively proposed separate features for small and large objects. Recent studies, including those by Huang et al. (2022), Khiabani et al. (2019), and He et al. (2019), have continued using the analytical image feature functions. Nonetheless, despite their applicability, the challenge of complete decoupling remains unsolved. Furthermore, these improved features are subject to limitations when confronted with a variety of object sizes and shapes.
Leveraging the machine learning techniques and the universal approximation capabilities of neural networks, several studies proposed data-driven features. Machine learning methods such as support vector machine (SVM) is proposed by Li et al. (2015) to learn the mapping model from four moment invariants to two virtual moments in order to decouple
In addition, Neural Network (NN)-based methods have demonstrated promising results in this area. Zhao et al. (2012) and Zhou et al. (2021) proposed a method using shallow neural networks to identify two rotational decoupled image features about the x and y-axes (
This study proposes a set of decoupled image features specifically tailored to the unique geometry of the targeting pin used in satellite capturing. By achieving a near-diagonal interaction matrix, we aim to minimize the coupling effects, enhancing the accuracy and efficiency of the target tracking. This decoupling is crucial for smooth and precise operations, reducing the risk of errors and improving overall system performance.
Our chosen method to identify and optimize these decoupled features involves Deep Neural Network (DNN) training. DNNs offer a sophisticated approach to model complex relationships and patterns, making them ideal for extracting and refining the necessary image features for effective visual servoing. Through extensive training and optimization, we aim to develop a robust DNN model capable of estimating the pose of the robot for the closed-loop visual servoing. The experimental results on a Denso robot show that the developed DNN-based visual servoing can accurately guide the manipulator to track the targeting pin in real-time. The developed method is expected to enhance the precision, safety, and efficiency of space operations on the ISS.
This paper presents our research on DNN-based visual servoing for satellite target tracking. Sections 2.1–2.4 explore the core of our method, detailing image feature definition, hyperparameter tuning, and the architecture of the DNN model. Section 2.5 describes the generation of a comprehensive dataset, which is essential for training the DNN model. Sections 3, 4 present a series of practical tests and validations that demonstrate the effectiveness of our approach. The paper concludes with Section 5, which summarizes our findings, their significance for space robotics, and potential directions for future research.
2 Materials and methods
2.1 DNN-based visual servoing
The choice of the set of visual features for decoupling the 6 DOF motion has been a well-known challenge in visual servoing. The commonly used point features introduce a non-diagonal interaction matrix which usually contains the terms that involve the depth of the point (Z), the image coordinate (x, y), and partial derivatives of the projection equations. Using the appropriate combination of image moments to estimate the pose may result in good decoupling and linearizing properties. The power of a deep learning-based approach is leveraged to propose a set of image features based on various image moments that are almost perfectly decoupled for the specific geometry of the targeting pin (see Figure 1). This section starts with the feature definition and estimation approach and proceeds to the detailed architecture of the proposed DNN model and fine-tuning the hyperparameters of the model.
2.2 Image feature definition
Consider a 6-DOF manipulator with a camera installed on its end-effector. The target object is assumed to be stationary with respect to the robot’s reference frame. We choose the different combinations of image moments as the input to the DNN model to estimate the pose. The set of image features of the target object is represented as Equation 2:
where
where
It is noticed that Equation 3 is obtained under the conditions that DNN models representing
Deep neural networks (DNNs) prove to be a robust approach for this type of estimation. In this study, the proposed network’s input is a set of moments, central moments, and a few engineered features and the output aims to predict the camera’s six-dimensional (6D) pose. Its specific architecture will be discussed in the next subsection.
2.3 Architecture
The DNN-based visual servoing approach has an architecture designed to estimate the camera’s pose effectively with respect to the targeting pin. Designing an optimal DNN architecture is an iterative process that requires extensive evaluations in different scenarios to identify the architecture that best solves the problem. The initial network used an architecture with shared neurons to estimate both the rotational and translational poses of the camera. However, experimental results showed that the complexity of translational poses required a deeper network, while rotational poses could be successfully obtained from a shallower network. It is worth noting that experimenting with deeper networks resulted in overfitting during training for rotational poses.
Translational and orientational poses differ fundamentally, requiring unique approaches for their accurate estimation. Thus, we proposed an architecture in which the initial two layers are shared for rotational and translational DOFs, while the subsequent layers operate in parallel. For translational elements
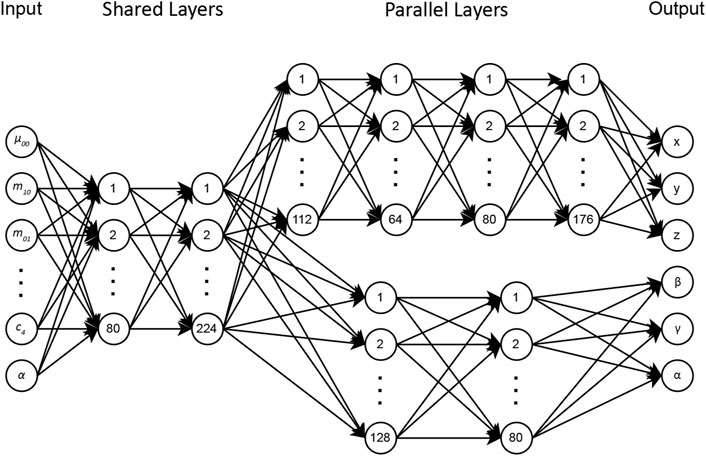
Figure 2. DNN architecture for camera pose estimation from image moments.
The model’s input includes the image moments up to the third order
By employing this architecture, we aim to achieve high accuracy in both translational and rotational pose predictions.
2.4 Hyperparameter tuning
In the search for optimal model performance, we explored several hyperparameters:
Given the vast hyperparameter space, an efficient strategy of Random Search was used to circumvent the computational cost associated with exhaustively exploring every combination. Random Search samples a fixed number of hyperparameter combinations from the total pool to balance computational efficiency and the broadness of exploration, and increase the probability of finding a near-optimal set of hyperparameters.
Table 1 summarizes the hyperparameter values that were found to be most effective, and were used to initialize the training.

Table 1. Optimal hyperparameter values from random search.
2.5 Data set generation
In a supervised approach, training is the most critical part, and to fully unleash the power of the deep learning model, we need a high-quality training dataset. To this end, we created a dataset which consists of both synthetic and real-world images from the targeting pin. For generating the synthetic data, we used RoboDK, a sophisticated offline programming and simulation platform designed specifically for robotics applications. This section presents a novel approach that overcomes a significant limitation in the data generation process that ensures the targeting pin remains in the image plane when random positions are assigned to the camera. As depicted in Figure 3, the simulation setup consisted of a Denso manipulator equipped with a camera mimicking the properties of our real-world setup.
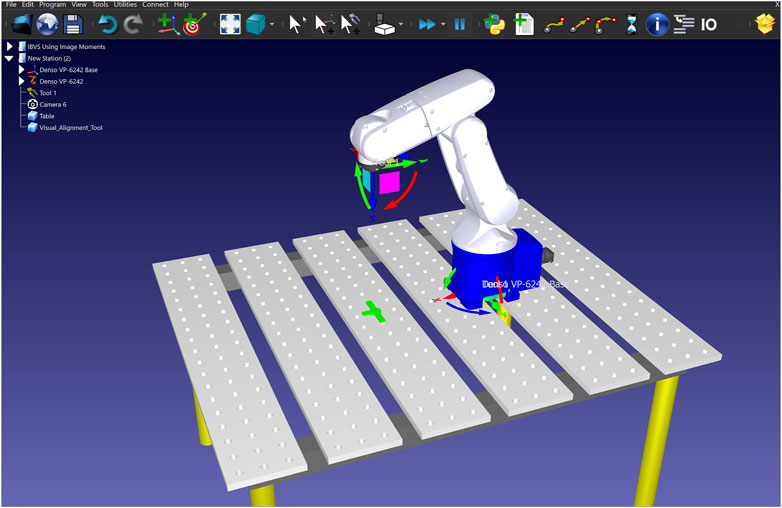
Figure 3. RoboDK environment including the Denso robot, the camera, and the targeting pin.
In this approach, the goal is to randomly assign values to all 6 DOFs with the constraint that the object is in the image plane. Considering this constraint, first, the x, y, and z coordinates of the camera (mounted on the end effector) were randomly generated within the working range of the manipulator. Next, to generate the orientational DOFs randomly, the camera is supposed to initially have the object at the center of the image plane. This pose was computed using a “Look at” function. The “Look at” function is typically designed to orient the camera towards a specific point (object’s centroid in our case) in the environment.
This function starts by defining a source point (camera) and a target point (object), along with initial vectors for up (U), front (F), and right (V). V, U and F are initially considered as the unit vectors pointing in the positive x, y and z-axes, respectively (see Equation 7).
The first step is to calculate the new front vector
Next, we calculate the new up vector
In case the resulting vector has zero magnitude, we default
The third axis,
These new basis vectors (
Finally, the pose of the camera is represented as a
Next, to randomly generate rotational DOFs, we first rotate the camera about its optical axis within a predefined range. Rotating about the optical center will not result in losing the object from the image plane. Then we determine the rotation bounds for the camera about its x and y-axes, based on the distance of the camera from the object. We can obtain the rotation limits by performing linear interpolation between the predefined bounds at two known distances, ensuring that the object remains in the image plane. Consequently, the camera was rotated around its x and y-axes for a random value within these limits. Table 2 includes the boundaries used for the pose parameters.
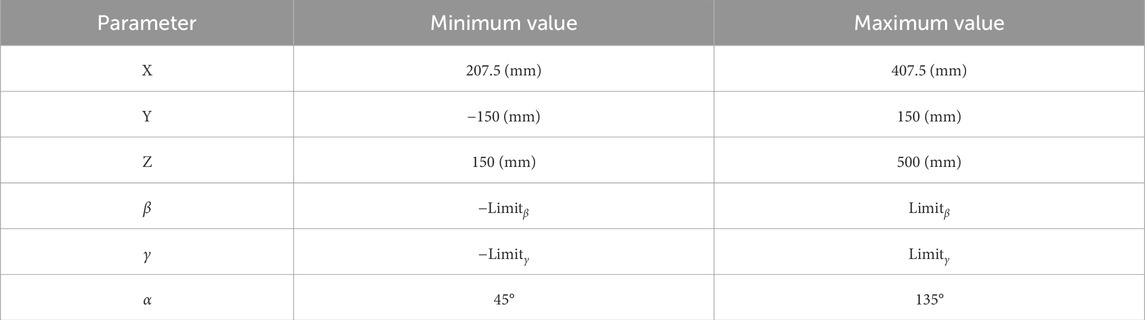
Table 2. Ranges of the pose parameters (
The dataset includes the entries for the calculated image moments and central moments of the captured image, while the corresponding camera pose is collected as the label. Initially, in the simulated environment, 434,528 random poses were generated within the ranges of Table 2, sequentially commanded to the Denso manipulator. At each pose, an image was captured by the mounted camera and processed into a binary representation, and the moments and central moments were then computed.
In addition to the synthetic data, we also captured real data to enrich the data set and enhance the robustness of our model in real-world scenarios. To realize this, we used a similar approach to generate random camera poses. However, due to the slower operational tempo of the physical setup compared to the simulator, we recorded data during the motion of the end effector from one random pose to another. However, to ensure that only valid data is captured, it is necessary to apply constraints that exclude images that do not fully capture the targeting pin. As a result, to ensure the presence of the object, the data points were only recorded when a single contour larger than 500 pixels was detected in the image and when the bounding box of the target pin was at least 10 pixels away from the image borders. This cautious approach resulted in 1912 distinct poses commanded to the Denso robot, yielding a total of 198,588 valid real-world data points (including data points captured during the camera movement from one random pose to the other).
To provide a visual representation of how the data set is created, two videos were prepared to show the process in action. The first video demonstrates the simulation environment data generation, accessible at this link, while the second video shows the real environment data generation, available at this link.
The final data set was carefully split, with all synthetic and half of the real data allocated for training. The remaining real data was evenly divided between the validation and test sets (Figure 4). This approach originated from our experimental findings that relying only on either synthetic or real data reduced the performance on the test set, likely due to the real environment’s noise and lighting conditions and the limited diversity of poses in the real data. As a result of combining both data sources, we were able to achieve a balance that captured both the complexity of real-world scenarios and provided enough variability for robust model training.
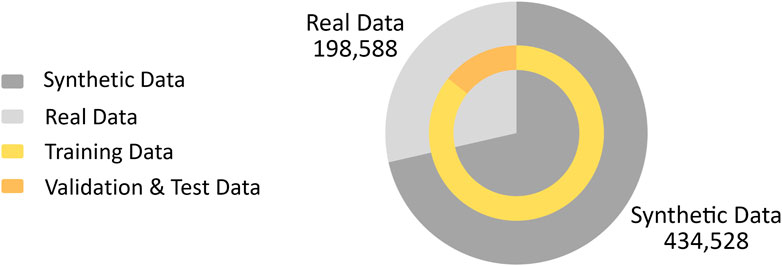
Figure 4. Distribution of synthetic and real data used for training, validation, and testing.
3 Results
First, in Section 3.1, we introduce the experimental setup mimicking the satellite target tracking in the space. Section 3.2 presents the initial performance evaluation of our trained DNN model for pose estimation. In Section 3.3 we explore the computation of the interaction matrix and present experimental results on target tracking with different initial poses.
3.1 Experimental setup
Similar to the setup in our simulations (see Figure 3), our experimental layout includes a 6-DOF Denso robotic manipulator, an Intel RealSense D415 RGB camera for high-quality image capture, and a green 3D-printed targeting pin that mimics the ISS’s guiding markers, as illustrated in Figure 5.
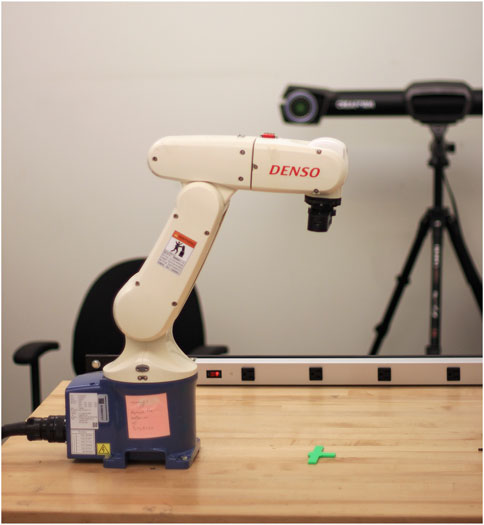
Figure 5. Experimental setup within the real environment.
3.2 Training results
The DNN model, as described in Section 2.3, was trained for 1,000 epochs, where the loss value eventually plateaued, indicating an optimal learning point. To determine the pose estimation accuracy of the model, we used the Mean Absolute Error (MAE) along with a Scaled MAE metric customized for our multi-output scenario. The scaled MAE was necessary due to the different units and magnitudes of the outputs (translational values in millimeters and rotational values in degrees). To compute it, we first normalized each output’s MAE by its range from Table 3, ensuring uniform error scaling across all outputs.

Table 3. Ranges for output elements of the dataset.
The ‘best’ model was selected based on its performance on the validation set. Table 4 presents the MAE data for this model, offering insights into its translational and rotational pose accuracy.
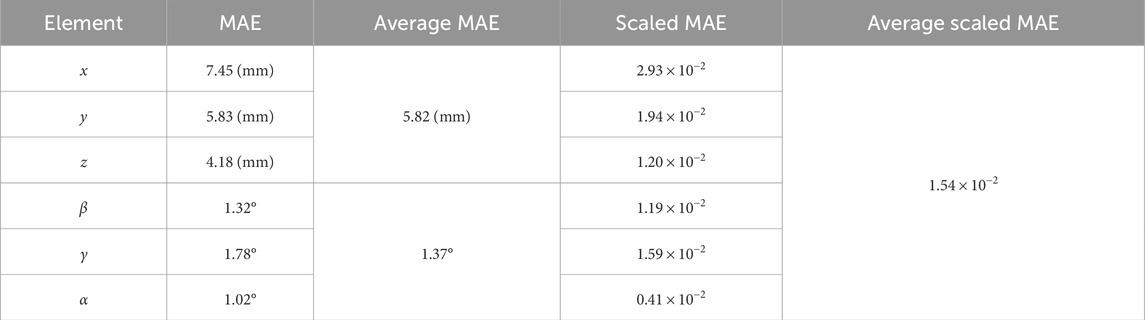
Table 4. Final model’s mean absolute error data.
3.3 Experiments
It is necessary to derive an interaction matrix for the final DNN model. While our initial aim was to derive a diagonal interaction matrix, the practical limitations in achieving zero-error pose estimation necessitated the use of the actual interaction matrix in our experiments. In Equation 3, the
As evident from the interaction matrix in Equation 13, the diagonal elements
We tested the model with five distinct initial poses, ensuring a mix of positive and negative initial errors for each degree of freedom. The chosen initial poses, labelled A through E, are detailed in Table 5.

Table 5. Initial and desired poses.
The block diagram of the DNN-based visual servoing is depicted in Figure 6, where we used a proportional controller and the DNN extracts feature (pose) from the images. For these tests, we adjusted the P controller for each degree of freedom to ensure the manipulator’s end effector converges within 1 cm and 3° to the desired pose. The resulting trajectories for each initial pose are depicted in Figure 7.
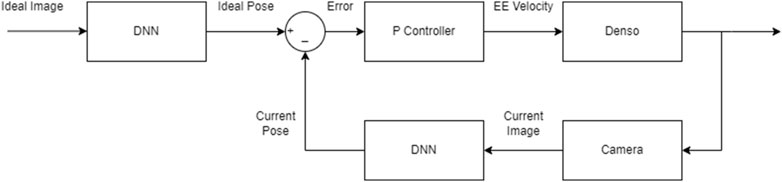
Figure 6. DNN-based visual servoing block diagram.
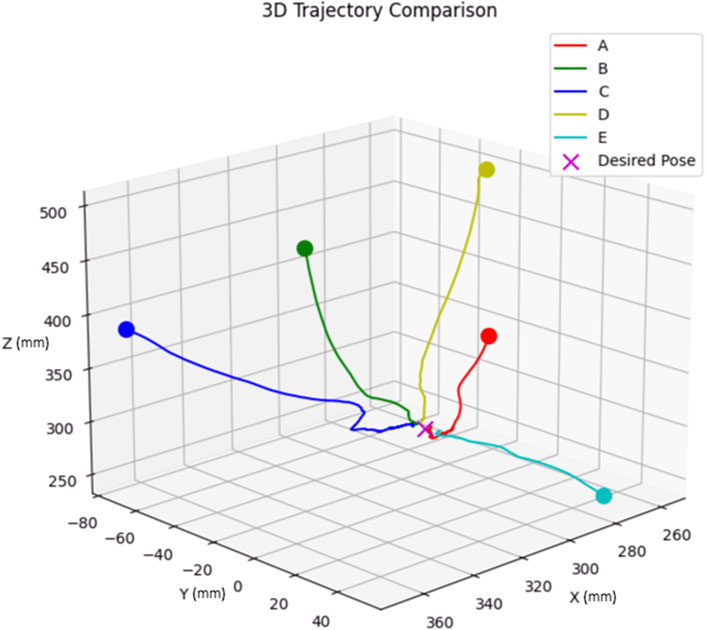
Figure 7. Trajectory comparison of five different initial poses.
As shown from Figure 7, the end effector follows an almost straight path from its start to the target. However, in practice, as the end effector gets close to the desired pose, we noted minor shakiness in its movement. This is caused by small oscillations in the pose estimates, which are the outputs of the neural network.
4 Discussion
To validate the proposed features derived from the DNN method, some comparisons were made with a prominent set of features in the literature. This set consists of Tahri and Chaumette (2005)’s features, which are the centroid coordinates
where
The Liu method’s features have the units of

Table 6. Tuned P controllers for the DNN and Liu methods.
Running the methods for 100 s under different initial poses yielded similar results. Therefore, to illustrate the comparison, we present the results for initial pose C (as outlined in Table 5) as an example. Figure 8A shows the trajectory plot, comparing the end-effector path for both the Liu and DNN methods from initial pose C. The plots clearly show that the DNN method achieves a direct and efficient trajectory from the starting pose to the target. In contrast, the Liu method resulted in a curved, less efficient path. It is important to highlight that the Liu method operates on feature error, not pose error. As a result, in certain experiments, the end effector stopped close to the desired pose due to minimal feature differences between images. However, the DNN method almost consistently identified these differences, ending up at the correct pose.
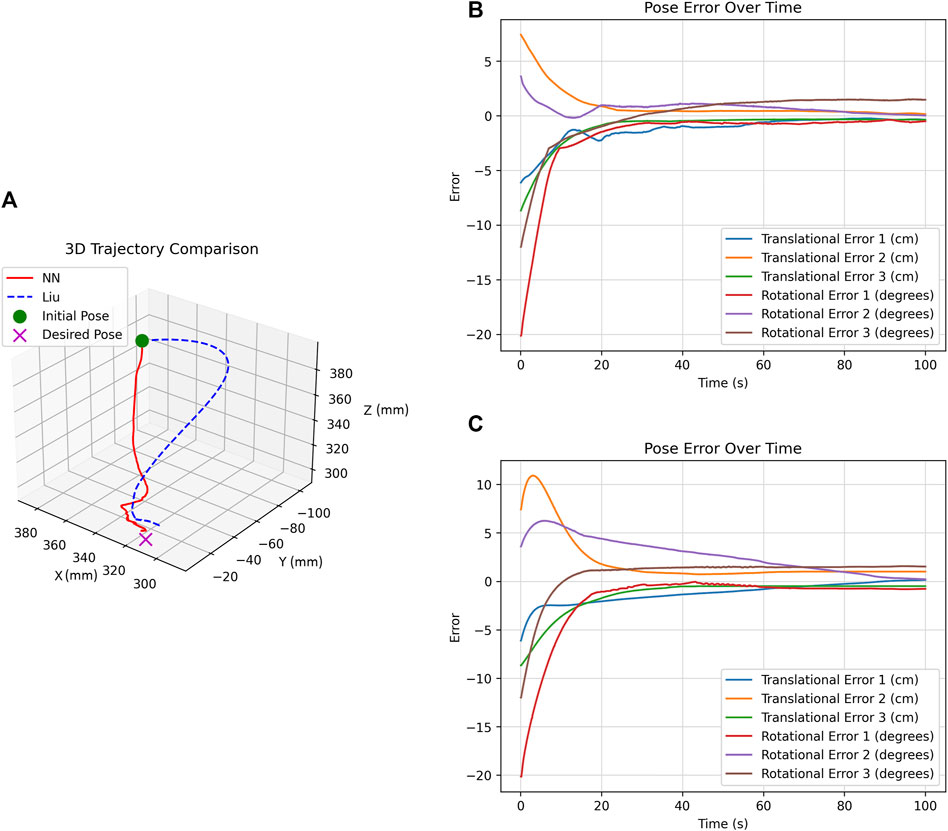
Figure 8. Analysis of DNN and Liu Methods for initial pose C (A) Trajectory comparison. (B) DNN method’s pose error over time. (C) Liu method’s pose error over time.
Figures 8B, C show the pose error of the DNN and Liu methods over time, respectively. A closer look at these plots reveals that the DNN method has a faster response with less overshoot, which is desirable for our application.
While Figure 8 shows improvements in the performance, it does not provide the quantitative details needed for a comprehensive analysis. Thus, we use three metrics: RMS (Root Mean Square), Max (Maximum value), and STD (Standard Deviation).
For an organized overview, Table 7 lists these metrics over the same experiments with initial pose C (as outlined in Table 5).
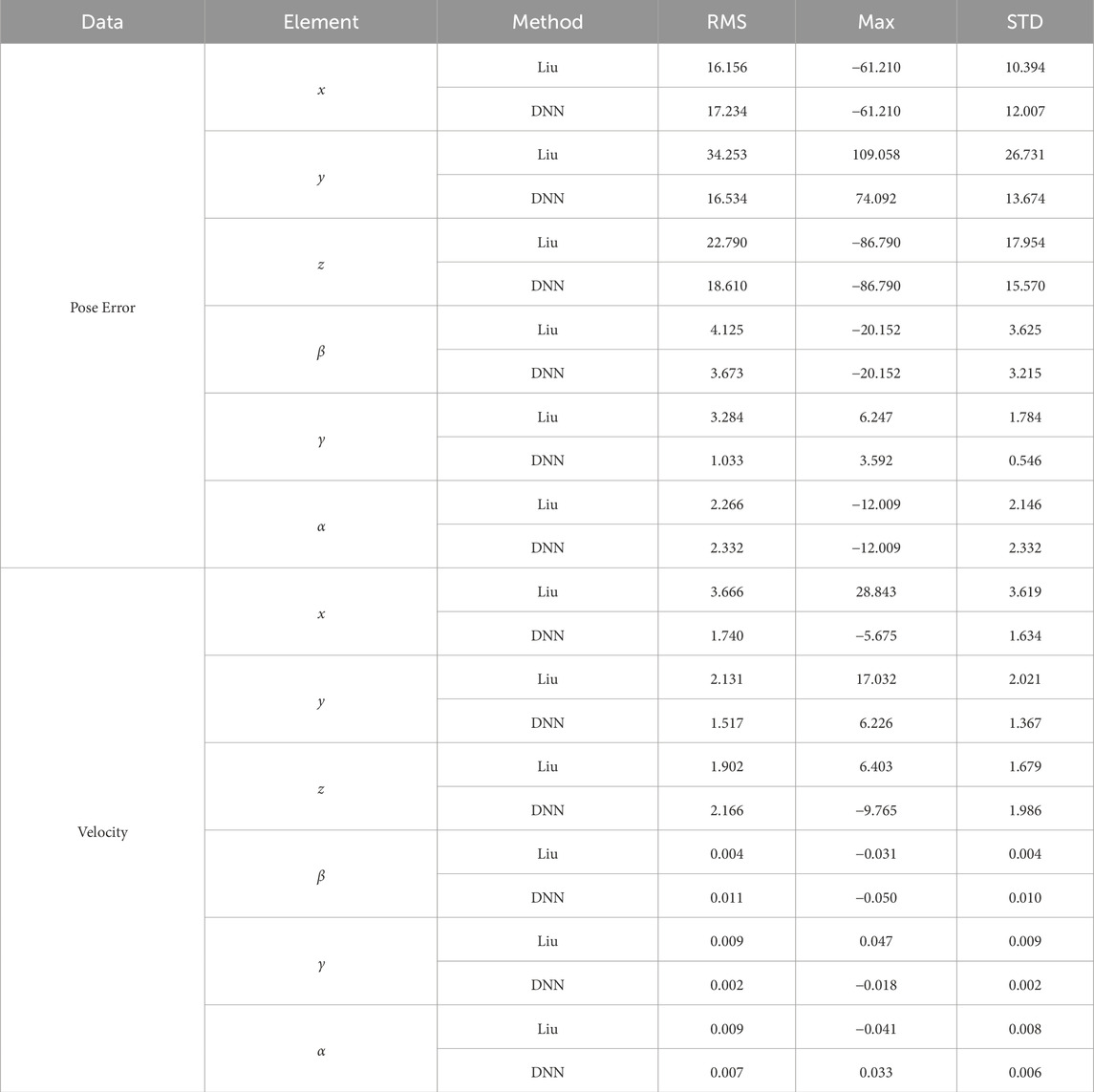
Table 7. Metrics comparison for Initial Pose C.
From the detailed analysis of Table 7, it is evident that the DNN method’s performance significantly improved for most of the degrees of freedom. The consistently lower RMS, Max, and STD values indicate a more stable and predictable performance. However, there are notable exceptions in the
To better compare the performance of the methods and to evaluate the improvement of the DNN method, the average RMS values for pose error and velocity are presented in Table 8. It is evident that the Deep Neural Network (DNN) method substantially outperforms the Liu method in several key aspects. The DNN method reduced the average RMS values for translational pose error and velocity by over 47%, demonstrating a robust capability in improving the system’s responsiveness and accuracy. Despite these gains, the DNN method shows a smaller improvement of 13.85% in rotational pose error and a slight decrease in performance for rotational velocities. This small decrease is on the order of

Table 8. comparison of average RMS values and improvements in translational and rotational DOFs for pose error and velocity.
The DNN-based visual servoing method’s adaptability to unanticipated scenarios is demonstrated in this video, showing the manipulator’s response when the targeting pin is arbitrarily re-positioned in the workspace. The video highlights the system’s capability to efficiently track the targeting pin, ensuring it remains centered and parallel in the camera’s view within a short amount of time.
5 Conclusion
This research addresses the challenge of coupling in visual servoing to autonomously track the targeting pin on servicing satellites using a robotic manipulator. In this paper, we presented a novel deep learning-based visual servoing approach that uses image moments to precisely estimate the camera’s pose to achieve decoupled image features. The main contributions and conclusions of this research are as follows:
The most important impact of this study is its adaptability for controlling various robotic manipulators in marker-based applications. By using our training procedure for any targeting pin, one can potentially achieve performances outperforming some classical image moment-based visual servoing methods.
6 Future works
The following suggestions can potentially improve the proposed methods’ performance and generalizability:
Data availability statement
The datasets presented in this article are not readily available because the dataset can be only accessible for the robotic engineers. Requests to access the datasets should be directed to SG, c2hheWFuLmdoQGhvdG1haWwuY29t.
Author contributions
SG: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Software, Validation, Visualization, Writing–original draft, Writing–review and editing. W-FX: Funding acquisition, Project administration, Resources, Supervision, Writing–review and editing. AM: Project administration, Resources, Supervision, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. The project is supported by NSERC to develop AI-driven autonomous robots for space applications. The fund is used to support the first author’s salary.
Acknowledgments
The authors gratefully acknowledge the support from the NSERC Collaborative Research and Training Experience (CREATE) Program.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
2http://iss.jaxa.jp/library/photo/iss022e020034.php
References
Ahlin, K., Joffe, B., Hu, A.-P., McMurray, G., and Sadegh, N. (2016). Autonomous leaf picking using deep learning and visual-servoing. IFAC-PapersOnLine 49, 177–183. 5th IFAC Conference on Sensing, Control and Automation Technologies for Agriculture AGRICONTROL 2016. 14–17 August 2016, Seattle, WA, USA. doi:10.1016/j.ifacol.2016.10.033
Chang, V., and Evans, L. (2009). “Chapter 9 - robotic systems safety,” in Safety design for space systems. Editors G. E. Musgrave, A. S. M. Larsen, and T. Sgobba (Burlington: Butterworth-Heinemann), 301–318. doi:10.1016/B978-0-7506-8580-1.00009-9
Chaumette, F. (2004). Image moments: a general and useful set of features for visual servoing. IEEE Trans. Robotics 20, 713–723. doi:10.1109/TRO.2004.829463
Chaumette, F., and Hutchinson, S. (2006). Visual servo control. i. basic approaches. IEEE Robotics and Automation Mag. 13, 82–90. doi:10.1109/MRA.2006.250573
Corke, P. (1996). Visual Control of Robots: high-performance visual servoing. United Kingdom: Research Studies Press Taunton.
He, Z., Wu, C., Zhang, S., and Zhao, X. (2019). Moment-based 2.5-d visual servoing for textureless planar part grasping. IEEE Trans. Industrial Electron. 66, 7821–7830. doi:10.1109/TIE.2018.2886783
Herrera-Aguilar, I., and Sidobre, D. (2006). “Soft motion trajectory planning and control for service manipulator robot,” in Workshop on physical human-robot interaction in anthropic domains at IROS, 13–22.
Hu, M.-K. (1962). Visual pattern recognition by moment invariants. IRE Trans. Inf. theory 8, 179–187. doi:10.1109/TIT.1962.1057692
Huang, Y., Li, J., Zhang, X., Xie, K., Li, J., Liu, Y., et al. (2022). A surgeon preference-guided autonomous instrument tracking method with a robotic flexible endoscope based on dvrk platform. IEEE Robotics Automation Lett. 7, 2250–2257. doi:10.1109/LRA.2022.3143305
Jafarinasab, M., Sirouspour, S., and Dyer, E. (2019). Model-based motion control of a robotic manipulator with a flying multirotor base. IEEE/ASME Trans. Mechatronics 24, 2328–2340. doi:10.1109/TMECH.2019.2936760
Khiabani, P. M., Ramezanzadeh, J., and Taghirad, H. D. (2019). “Implementation of an improved moment-based visual servoing controller on an industrial robot,” in 2019 7th international conference on robotics and mechatronics (ICRoM), 125–131. doi:10.1109/ICRoM48714.2019.9071911
Li, W., Ye, G., Wan, H., Zheng, S., and Lu, Z. (2015). “Decoupled control for visual servoing with svm-based virtual moments,” in 2015 IEEE International Conference on Information and Automation, 08-10 August 2015, Lijiang, China: IEEE, 2121–2126. doi:10.1109/ICInfA.2015.7279638
Liu, J., and Li, Y. (2019). An image based visual servo approach with deep learning for robotic manipulation. CoRR, 07727. doi:10.48550/arXiv.1909.07727
Liu, S., Xie, W.-F., and Su, C.-Y. (2009). “Image-based visual servoing using improved image moments,” in 2009 international conference on information and automation, 22-24 June 2009, Zhuhai, Macau: IEEE, 577–582.
Quaccia, M., André, A., Yoshiyasu, Y., and Caron, G. (2024). “A study on learned feature maps toward direct visual servoing,” in 16th IEEE/SICE international symposium on system integration (SII), 08-11 January 2024, Ha Long, Vietnam: IEEE and SICE.
Shaw, Q., Hu, J., Fang, Y., Liu, W., Qi, J., and Zhu, G.-N. (2016). “Image moments based visual servoing of robot using an adaptive controller,” in 2016 Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), 20-22 July 2016, Tokyo, Japan: IEEE, 57–61. doi:10.1109/ACIRS.2016.7556188
Shi, Y., Liang, B., Wang, X., Xu, W., and Liu, H. (2012). “Study on intelligent visual servoing of space robot for cooperative target capturing,” in 2012 IEEE International Conference on Information and Automation, 06-08 June 2012, Shenyang, China, IEEE, 733–738. doi:10.1109/ICInfA.2012.6246915
Tahri, O., and Chaumette, F. (2005). Point-based and region-based image moments for visual servoing of planar objects. IEEE Trans. Robotics 21, 1116–1127. doi:10.1109/TRO.2005.853500
Tamtsia, A. Y., Tahri, O., Mezouar, Y., Djalo, H., and Tonye, E. (2013). “New results in images moments-based visual servoing,” in 2013 IEEE International Conference on Robotics and Automation, 06-10 May 2013, Karlsruhe, Germany: IEEE, 5271–5276.
Wu, D., Zhong, X., Zhang, X., Peng, X., and Zou, C. (2018). “Uncalibrated image-based visual servoing based on joint space and image moment,” in 2018 37th Chinese control conference (CCC), 25-27 July 2018, Wuhan, China: IEEE, 5391–5397. doi:10.23919/ChiCC.2018.8483954
Zhao, Y., Xie, W., and Wang, T. (2012). “Neural network-based image moments for visual servoing of planar objects,” in 2012 IEEE/ASME international conference on advanced intelligent mechatronics (AIM), 11-14 July 2012, Kaohsiung, Taiwan: IEEE, 268–273.
Keywords: visual servoing, robot vision systems, deep neural networks, deep learning, pose estimation
Citation: Ghiasvand S, Xie W-F and Mohebbi A (2024) Deep neural network-based robotic visual servoing for satellite target tracking. Front. Robot. AI 11:1469315. doi: 10.3389/frobt.2024.1469315
Received: 23 July 2024; Accepted: 16 September 2024;
Published: 08 October 2024.
Edited by:
Daniele Meli, University of Verona, ItalyReviewed by:
Lale Canan Dülger, İzmir University of Economics, TürkiyeAndrea Roberti, University of Verona, Italy
Copyright © 2024 Ghiasvand, Xie and Mohebbi. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Wen-Fang Xie, d2VuZmFuZy54aWVAY29uY29yZGlhLmNh