 Leonard Bärmann
Leonard Bärmann Rainer Kartmann
Rainer Kartmann Fabian Peller-Konrad
Fabian Peller-Konrad Jan Niehues
Jan Niehues Alex Waibel
Alex Waibel Tamim Asfour
Tamim Asfour- Institute for Anthropomatics and Robotics (IAR), Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany
Natural-language dialog is key for an intuitive human–robot interaction. It can be used not only to express humans’ intents but also to communicate instructions for improvement if a robot does not understand a command correctly. It is of great importance to let robots learn from such interaction experiences in an incremental way to allow them to improve their behaviors or avoid mistakes in the future. In this paper, we propose a system to achieve such incremental learning of complex high-level behavior from natural interaction and demonstrate its implementation on a humanoid robot. Our system deploys large language models (LLMs) for high-level orchestration of the robot’s behavior based on the idea of enabling the LLM to generate Python statements in an interactive console to invoke both robot perception and action. Human instructions, environment observations, and execution results are fed back to the LLM, thus informing the generation of the next statement. Since an LLM can misunderstand (potentially ambiguous) user instructions, we introduce incremental learning from the interaction, which enables the system to learn from its mistakes. For that purpose, the LLM can call another LLM responsible for code-level improvements in the current interaction based on human feedback. Subsequently, we store the improved interaction in the robot’s memory so that it can later be retrieved on semantically similar requests. We integrate the system in the robot cognitive architecture of the humanoid robot ARMAR-6 and evaluate our methods both quantitatively (in simulation) and qualitatively (in simulation and real-world) by demonstrating generalized incrementally learned knowledge.
1 Introduction
Humans can easily communicate tasks and goals to a robot via language. Such a natural-language interface is key for achieving a truly intuitive human–robot interaction (HRI). However, the robot’s interpretation of such commands, and thus the resulting execution, might be sub-optimal, incomplete, or wrong. In such cases, it is desirable for the human to give further instructions to correct or improve the robot’s behavior. Furthermore, the robot should memorize the improvement strategy given by the human to incrementally learn from them and thus avoid the same mistake in the future. For instance, consider the interaction depicted in Figure 1. First, the user instructs the robot to help him clean the top of the fridge (1). The robot then executes several actions to hand over a sponge to the human (2). The user observes this insufficient result and gives instructions for improvement (“I also need a ladder”) (3), whereupon the robot performs corrective actions (4). If the desired goal is achieved, the user can reconfirm the correction (5), which leads to the robot updating its memory appropriately (6), thus incrementally learning new behavior based on language instructions.

Figure 1. ARMAR-6 incrementally learns behavior from natural interactions. Demonstration videos can be found at https://lbaermann.github.io/interactive-incremental-robot-behavior-learning/.
In this paper, we present a system to achieve such behavior and describe its implementation on the humanoid robot ARMAR-6 (Asfour et al., 2018). We build on the capabilities of large language models (LLMs) (Brown et al., 2020; Touvron et al., 2023; OpenAI, 2023a; OpenAI, 2023b) emerging from massive-scale next token prediction pre-training, and aim to transfer their success to HRI. The goal is to utilize the rich world knowledge contained in LLMs for an embodied natural language dialog, thus enhancing the capabilities of the LLM by integrating robot perception and action. In the cognitive architecture of our humanoid robot (Peller-Konrad et al., 2023), this means the LLM will be in charge of high-level planning and decision-making. Recent works like SayCan (Ahn et al., 2022) and Code as Policies (CaP) (Liang et al., 2023) already demonstrate the usefulness of applying LLMs to orchestrate robot abilities, enabling high-level task understanding, planning, and generalization. Going a step further, inner monologue (Huang et al., 2022b) feeds back execution results and observations into the LLM, thus involving the LLM in a closed-loop interaction.
Inspired by these works, we propose to utilize the code-writing capabilities of LLMs to directly integrate it into closed-loop orchestration of a humanoid robot. This is achieved by simulating an interactive (Python) console in the prompt and letting the LLM produce the next statement, given the previous execution history, including results returned or exceptions thrown by previous function calls. Thus, the LLM can dynamically respond to unexpected situations such as execution errors or wrong assumptions while still leveraging the power of a code-based interaction such as storing results in intermediate variables or defining new functions.
For utilizing the few- and zero-shot capabilities of LLMs, it is crucial to design (a set of) prompts to properly bias the LLM toward the desired output. All of the above works use a predefined, manually written set of prompts tuned for their respective use case. However, no LLM or prompting scheme will always interpret each user instruction correctly, especially since natural language can be ambiguous and correct execution might depend on user preferences. Therefore, we propose a novel, self-extending prompting method to allow incremental learning of new behaviors and adaptation of existing high-level behaviors. To this end, our system dynamically constructs prompts based on a set of interaction examples populated from the robot’s prior knowledge and previously learned behavior. Given a user instruction, we rank all such interaction examples by semantic similarity to the input and select the top-
Our method is explained in detail in Section 3. We evaluate our system quantitatively on the scenarios defined in CaP (Liang et al., 2023) to show the effectiveness of our proposed approach in Section 4. Furthermore, Section 5 demonstrates the capabilities of incremental learning from natural-language interactions on a real-world humanoid robot. Our code can be found at https://github.com/lbaermann/interactive-incremental-robot-behavior-learning.
2 Related work
We start by reviewing works on understanding and learning from natural language in robotics. Subsequently, we present works using LLMs for high-level orchestration of robot abilities. Finally, we focus on dynamic creation of prompts for LLMs.
2.1 Understanding and learning from natural language
Understanding and performing tasks specified in natural language has been a long-standing challenge in robotics (Tellex et al., 2020). Grounding the words of natural-language sentences in the robot’s perception and action is a major challenge known as the signal-to-symbol gap (Krüger et al., 2011). Many works have focused on the grounding of expressions referring to objects, places, and robot actions based on graphical models (Tellex et al., 2011; Misra et al., 2016), language generation (Forbes et al., 2015), or spatial relations (Guadarrama et al., 2013), especially for ambiguity resolution (Fasola and Matarić, 2013; Shridhar et al., 2020). Pramanick et al. (2020) focused on resolving task dependencies to generate execution plans from complex instructions. However, in these works, the robot does not explicitly learn from language-based interactions. In contrast, Walter et al. (2013) enriched the robot’s semantic environment map from language, and Bao et al. (2016) syntactically parsed daily human instructions to learn attributes of new objects. In Kartmann and Asfour (2023), the robot asked for a demonstration if its current understanding of a spatial relation is insufficient to perform a given instruction. Other works go further by learning on the task level. Mohan and Laird (2014) learned symbolic task representations from a language interaction using explanation-based learning. Nicolescu et al. (2019) learned executable task representations encoding sequential, non-ordering, or alternative paths of execution from verbal instructions for interactive teaching by demonstration. Weigelt et al. (2020) considered the general problem of programming new functions on code level via natural language. Although our goal is similar to that of these works, we leverage LLMs for task-level reasoning and learning.
2.2 Code generation and interaction with LLMs
Generating code from natural-language specifications is a large area of active research. For instance, LLMs tuned specifically on code (Chen et al., 2021; Nijkamp et al., 2023) perform well in common code-generation benchmarks. Madaan et al. (2022b) showed that code-based models have more structured representations, thus aiding structured (e.g., graph-based) tasks. Training code-LLMs can also benefit from using an interpreter in the optimization loop (Le et al., 2022; Haluptzok et al., 2023). We refer the reader to recent surveys (Zheng et al., 2024; Ahmed et al., 2023; Dehaerne et al., 2022; Wang and Chen, 2023) for a more in-depth discussion.
Another recent trend is to use LLMs in an interactive, chat-style format. This became popular through OpenAI’s models (OpenAI, 2023a,b) and is typically powered by fine-tuning on alignment data using reinforcement learning from human feedback (Ouyang et al., 2022). In a code-based setting, such an interaction can, for instance, assist software development (Lahiri et al., 2023; Google, 2023). Furthermore, many recent works utilize interactive coding strategies to deploy LLMs as agents (Yang et al., 2024). For instance, Voyager (Wang G. et al., 2024) iteratively learns to master the game of Minecraft by letting an LLM code functions, and InterCode (Yang et al., 2023) connects an LLM to a Bash shell to solve a file system task, similar to our use of an interactive Python console. Recent benchmarks (Liu et al., 2024; Wang X. et al., 2024) will further catalyze this development. We deploy such an interactive coding strategy to real-world humanoid robotics and enrich it with incremental learning from natural interactions.
2.3 Orchestrating robot behavior with LLMs
Recently, many works extended the capabilities of LLMs by giving them access to external models, tools, and APIs (Mialon et al., 2023; Parisi et al., 2022; Qin et al., 2023; Wang et al., 2023). Tool usage can also be combined with reasoning techniques such as CoT prompting (Wei et al., 2022) to significantly improve planning (Yao et al., 2023). In particular, orchestrating robot behavior and thus interacting with the physical environment can be seen as an embodied special case of LLM tool usage. Huang et al. (2022a) initially proposed the idea to utilize world knowledge from LLM pre-training to map high-level tasks to executable mid-level action sequences. SayCan (Ahn et al., 2022) fuses LLM output probabilities with pre-trained affordance functions to choose a feasible plan, given a natural language command. Socratic models (Zeng et al., 2023) combine visual and textual LLMs to generate instructions in the form of API calls, which are then executed by a pre-trained language-conditioned robot policy. Both Code as Policies (CaP) (Liang et al., 2023) and ProgPrompt (Singh et al., 2023) demonstrate the usefulness of a code-generating LLM for robot orchestration as they convert user commands to (optionally, recursively defined) policy code grounded in predefined atomic API calls. Although the generated policies can react to the robot’s perception, these approaches do not directly involve the LLM in the online execution of a multi-step task after the policy has been generated. In contrast, Inner Monologue (Huang et al., 2022b) feeds back execution results and observations into the LLM, but it does not rely on code-writing, thus missing its combinatorial power. KnowNo (Ren et al., 2023) iteratively asks the LLM for a set of possible next steps, determines the LLM’s confidence in each possibility using its output token distribution in a multiple-choice setup, and then uses conformal prediction to decide whether the system is sure how to proceed or should ask the user for help. AutoGPT+P (Birr et al., 2024) combines an LLM with a symbolic planner. Recent technical reports (Vemprala et al., 2023; Wake et al., 2023) provide guidance on utilizing ChatGPT (OpenAI, 2023a) for robot orchestration. Meanwhile, TidyBot (Wu et al., 2023) uses GPT-3 (Brown et al., 2020) in a similar way to generate high-level plans for tidying up a cluttered real-world environment, but the authors focus on personalization by summarizing and thereby generalizing individual object placement rules.
With our proposed emulated Python console prompting, we differ from these existing works by 1) formatting and interpreting all interactions with the LLM as Python code, in contrast to Ahn et al. (2022) and Huang et al. (2022b); 2) closing the interaction loop by enabling the LLM to reason about each perception and action outcome, in contrast to Liang et al. (2023), Singh et al. (2023), Wake et al. (2023), Zeng et al. (2023), and Ahn et al. (2022); 3) allowing the LLM to decide when and which perception primitives to invoke, instead of providing a predefined list of observations (usually a list of objects in the scene) as part of the prompt as in Zeng et al. (2023), Huang et al. (2022b); Singh et al. (2023), Liang et al. (2023), and Wu et al. (2023); and 4) simplifying the task for the LLM by allowing it to generate one statement at a time, in contrast to Liang et al. (2023), Singh et al. (2023), and Vemprala et al. (2023).
2.4 Dynamic prompt creation
When prompting an LLM to perform a task, quality and relevance of the provided few-shot examples are key to the performance of the system. Thus, several works propose to dynamically select these examples (e.g., from a larger training set) for constructing a useful prompt. Liu et al. (2022) improved the performance in a downstream question-answering (QA) task by selecting relevant few-shot samples via
Other works go further by proposing to update the database of examples by user interactions. In Madaan et al. (2022a), GPT-3 was tasked with solving lexical and semantic natural language processing questions few-shot by generating both an understanding of the question and the answer. A user can then correct an erroneous understanding to improve the answer, and such a correction is stored in a lookup table for later retrieval on similar queries. Similarly, user feedback can be used to improve open-ended QA by generating an entailment chain along with the answer and allowing the user to then correct false model beliefs in that entailment chain (Dalvi Mishra et al., 2022). Corrections are stored in memory and later retrieved based on their distance to a novel question.
In our work, we also propose to store corrective user feedback as interaction examples in the robot’s memory. However, we go even further by 1) letting the LLM decide when such feedback is relevant (by invoking a certain function), 2) generating new examples of improved behavior from the human’s feedback, and thus, 3) treating prior knowledge and instructed behavior in a uniform way by treating both as interaction examples in the robot’s memory. Vemprala et al. (2023) mentioned that ChatGPT can be used to change the code based on high-level user feedback. However, they do not combine this with incremental learning to persist the improved behavior.
Closest to our approach are the concurrent works DROC (Zha et al., 2023) and HELPER (Sarch et al., 2023), shown in Figure 2. Similar to our learning from the interaction, DROC (Zha et al., 2023) distills knowledge from problematic interactions and retrieves it later when solving new tasks. Although the goal and problem setting are similar, we differ by formulating the complete interaction as code instead of separating task-level and skill-level into natural-language- and code-level interaction, respectively, and also by generalizing incremental learning as code manipulation instead of explicitly memorizing task-level natural-language constraints and skill-level variable assignments separately. HELPER (Sarch et al., 2023) retrieves few-shot examples for the LLM’s prompt from a language-program memory similar to our interaction example memory and learns personalized robot behavior by extending the memory. In contrast to our approach, they add examples only from successful episodes, and they have separate mechanisms for normal behavior and error correction. We focus on learning from feedback in erroneous or suboptimal episodes, and we treat initial and follow-up instructions uniformly using the proposed Python console prompting.
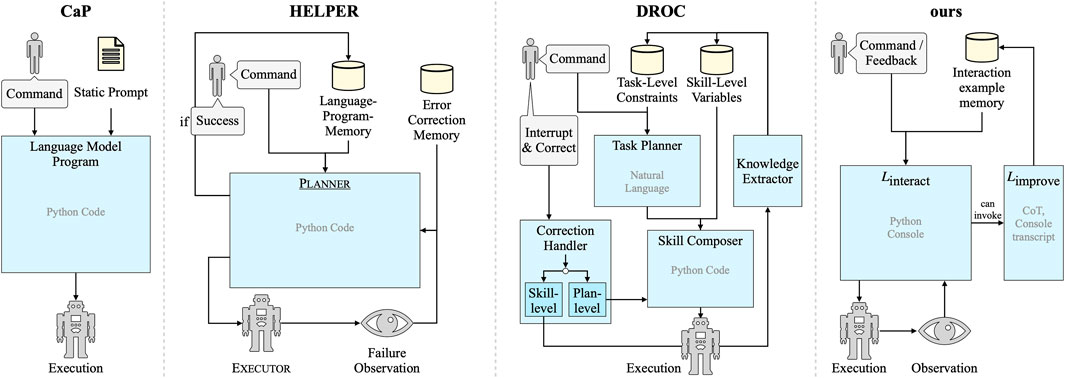
Figure 2. Comparison of Code as Policies (Liang et al., 2023), HELPER (Sarch et al., 2023), DROC (Zha et al., 2023), and our method, focusing on information flow from user input, observations, prompts, and memories to LLM modules to robot execution, and how the methods learn from user interactions. Building on the interactive Python console prompting scheme, our method realizes incremental learning from natural interactions in a conceptually simple way.
3 Approach
In this section, we more precisely formulate the considered problem and explain our approach to intuitive HRI and incremental learning of humanoid robot behavior using LLMs.
3.1 Problem formulation and concept
In this work, we consider the problem of enabling a robot to interact with a human in natural language, as depicted in Figure 3. First, the human gives a natural-language instruction to the robot. Then, the robot interprets the instruction and performs a sequence of actions. However, the performed actions might be sub-optimal, incomplete, or wrong. In that case, the human instructs the robot how to improve or correct its behavior. The robot executes further actions accordingly, and if the human is satisfied with the result, they can confirm that the robot should memorize this behavior. Finally, the robot must incrementally learn from the corrective instructions and avoid similar mistakes in the future.
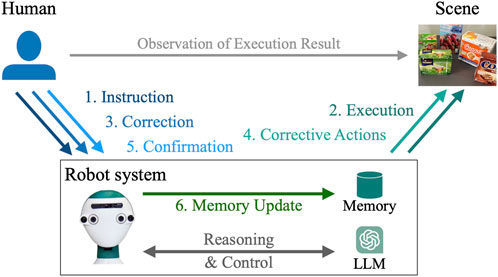
Figure 3. Incremental learning of robot behavior from interactions.
We formulate this problem as follows: Consider a robot with a set of functions
Note that we explicitly allow executing a generated invocation right away (potentially modifying the world state
where
To unify the subsequent notation, we define the human’s instructions as a special case of perception, i.e., the system perceives them as a result of invoking the function
If the human gives an instruction to correct the robot’s behavior, the robot must be able to learn from this instruction to improve its behavior in the future. We model this capability as another function
where
To address this problem, we propose a system as depicted in Figure 4. A humanoid robot is interacting with a human and the scene. The robot is equipped with a multimodal memory system containing the following information about the current scene: first, semantic knowledge about objects, locations, and agents in the world; second, sub-symbolic and symbolic knowledge about the current scene, including object relations; third, the procedural memory of the robot, containing executable skills (in our case, implemented through scripted policies). An execution request sent to the procedural memory triggers physical robot actions. The set of available functions
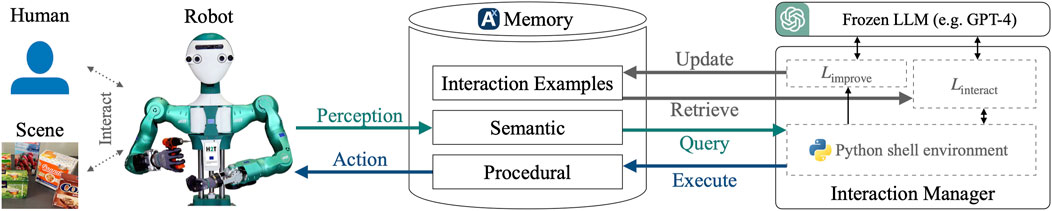
Figure 4. Conceptual view of our system. The robot’s memory system (Peller-Konrad et al., 2023) works as a mediator between the interaction manager and the robot system. The interaction LLM acts in a Python console environment. It can invoke functions to fetch the content of the current scene (as given by perception modules and stored in the memory) or invoke skills and thus perform robot actions. Relevant interaction examples are queried from the memory for few-shot prompting of the LLM. Incremental learning is performed by an improvement LLM updating the interaction example memory with new content learnt from instructions.
The interaction manager is responsible for the high-level orchestration of the robot’s abilities. It has access to two instances of LLMs, an interaction LLM
3.2 Procedure overview
To start, we populate the memory
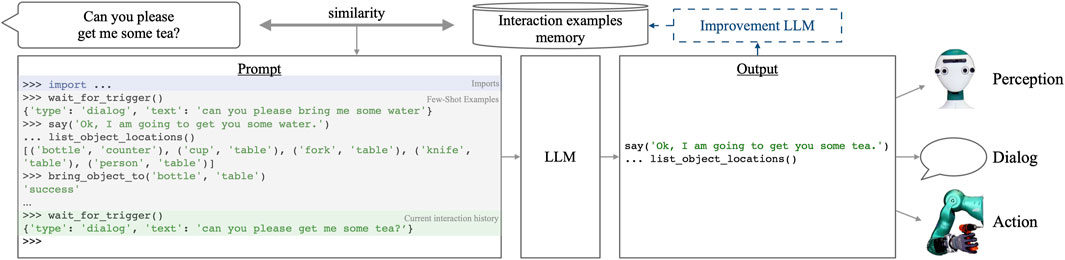
Figure 5. Overview of our method for incremental learning of robot behavior. We use an LLM [in our experiments, GPT-4 (OpenAI, 2023b)] to control robot perception and action, given a prompt of few-shot examples (bottom, Section 3.3). Prompts are constructed dynamically based on the similarity to the current user request (top left, Section 3.4). The interaction example memory is initialized with prior knowledge and then incrementally enriched by LLM-improved problematic interactions to learn from mistakes (top right, Section 3.5).
3.3 LLM interacting with an emulated Python console
The left of Figure 5 shows an interaction example using our proposed prompting scheme emulating a Python console. All commands entered into the emulated console (lines starting with “>>>” or “…”) are to be generated by the LLM, while the function return values are inserted below each invocation. The proposed syntax enables a closed interaction loop so that the LLM can dynamically react to unexpected situations and errors while also keeping the flexibility of coding non-trivial statements. We achieve this by setting “>>>” to be the stop token when prompting the LLM. This means that the LLM can generate continuation statements (including control flow and function definitions) by starting a new line with “…”. Since generation stops at the beginning of the next statement, the LLM’s output will also include the expected outcome of its own command, which we discard for the scope of this work.
During our experiments, we observed that it is important for functions to provide semantically rich error messages, including hints on how to improve. This leads to self-correcting behavior (Skreta et al., 2023). For instance, when calling “move_to” with an invalid or underspecified location such as “counter,” we pass the error message “invalid location. Use one of the locations returned by list_locations()” to the LLM. In this example, the error message guides the LLM to query a list of possible locations, which are then used to correctly ground the natural-language request to the name “inFrontOf_mobile-kitchen-counter_0” that the “move_to” function understands.
Analogously to Code as Policies (Liang et al., 2023), we dynamically generate non-existing functions that the LLM tries to use. Specifically, when
3.4 Dynamic prompt construction
We dynamically construct the prompt for
To implement the similarity function
where
The final similarity score is given by
3.5 Incremental prompt learning
To enable our system to learn new or improved behavior from user interaction, we propose to make
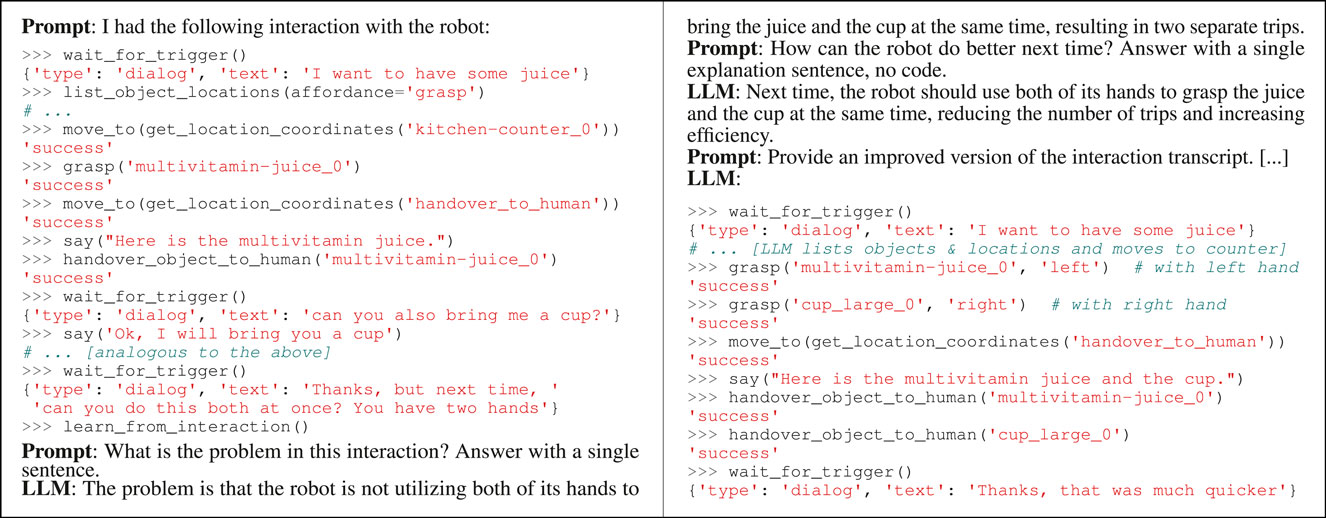
Listing 1. Example of the LLM-transcript generated by a “learn_from_interaction()” call. The parts starting with “LLM” are generated by theLLM, while the “Prompt” parts are fixed prompts (and the input code snippet to improve). A full prompt including few-shot examples isprovided in Supplementary Appendix G.
To implement learning from an erroneous interaction
4 Simulated evaluation
4.1 Experimental setup
To quantitatively assess the performance of our method, we utilize the evaluation protocol from Code as Policies (Liang et al., 2023), involving a simulated tabletop environment with a UR5e arm and Robotiq 2F85 gripper manipulating a set of blocks and bowls of 10 different colors. We use their seven seen and six unseen instructions (SI/UI), where each instruction is a task with placeholders that are filled with attributes (e.g., “pick up the
As our focus is on incremental learning from natural-language interactions, our methodology involves human supervision as follows: we first set up a randomly generated scene and pass the instruction to the evaluated system. The system generates some code that utilizes the same API as in Liang et al. (2023). Specifically, there are “perception” functions (utilizing the ground-truth simulation state) to query all object names and positions and convert normalized to absolute coordinates and an “action” function to move an object to another object or position. For details, see Supplementary Appendix A or Liang et al. (2023). During code execution, the human observes the robot’s actions by watching the simulation rendering. Each run can result in success (goal reached), failure (goal not reached), error (system threw unhandled exception), or timeout (e.g., system got stuck in a loop). The latter two lead to immediate termination of the experiment. In contrast, when the system yields control normally (after code execution for CaP and on
Every task is repeated 10 times using randomly generated scenes, and each run is performed in sequence, i.e., the interaction memory is not reset between runs in order to allow for incremental learning. To assess the results, we compute the following metrics from the execution traces:
s is the turnout success rate, i.e., the percentage of runs that ended in the success state (optionally after user interaction that clarifies the goal or helps the system).
i is the initial success rate, i.e., the percentage of runs that yielded a successful state on the first system return, i.e., where no user interaction was required to reach success.
n counts the number of user interactions that were required until the success state was first reached. For runs that count into the initial success category,
4.2 Baselines and methods
CaP: We utilize the prompts provided by Liang et al. (2023). This is equivalent to our system without incremental learning and without the interactive console formatting. Specifically, we note that CaP has no way of feeding back coding errors to the system, i.e., it fails immediately if the generated code is syntactically invalid or throws an exception.
HELPER: we adapt the code and prompts provided by Sarch et al. (2023) to the simulated tabletop evaluation scenario and API. For few-shot example retrieval, we set
Dynamic CaP: To make CaP a more competitive baseline, we add a simple form of learning and top-
Ours: this is our full system with incremental learning and a value of
Ours w/o learning: This is our system, but without incremental learning.
Ours w/o retrieval: This is our system with incremental learning but a very high value of
Furthermore, we compare the differently capable LLMs gpt-3.5-turbo-0301 and gpt-4-0613 of the OpenAI API (OpenAI, 2023a,b). For
4.3 Results
Tables 1, 2 present the aggregated results of our experiments, while further details can be found in Supplementary Appendix C. From these results, we draw the following main insights:
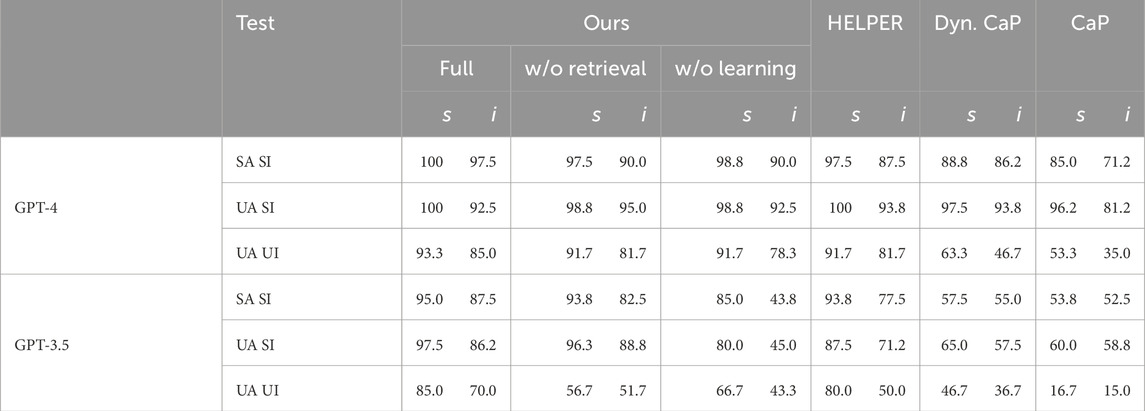
Table 1. Evaluation results on simulated tabletop tasks: success rate
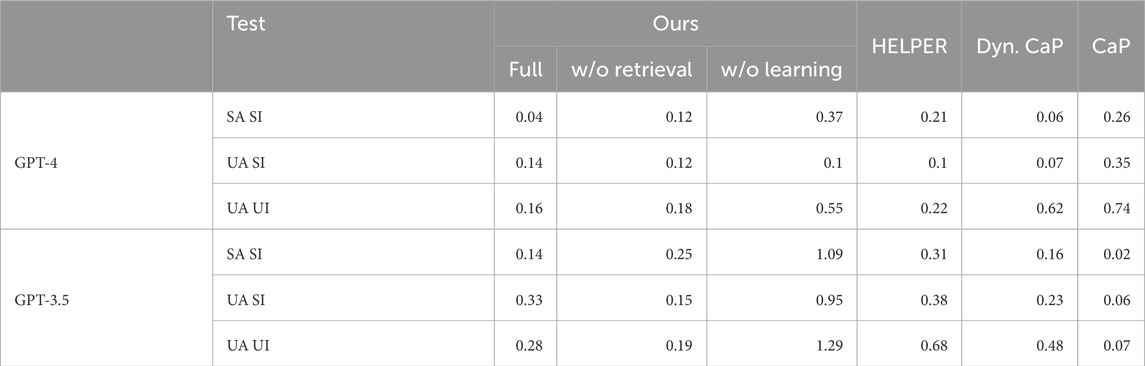
Table 2. Evaluation results on simulated tabletop tasks: average number of interactions until success
Interactive feedback helps achieve success. For all methods,
Incremental learning reduces necessity of corrective interactions. For many tasks,
Incremental learning improves the in-task success rate. Our systems with incremental learning also have higher
Incremental learning generalizes to new tasks. Qualitatively, we observed several cases where a correction for one task is useful for another task as well. For instance, GPT-3.5 initially interprets “the corner” as some position like
Demonstration retrieval improves performance. For both LLMs, our system with retrieval outperforms the system that always uses all samples. This is especially true for GPT-3.5 as the system without retrieval accumulated too many interaction examples in its memory in the final experiments, thus leading to immediate failure due to exceeding the LLM’s token limit. Although this is not the case for GPT-4 with its much larger context length, the performance of the system with retrieval is still better. We hypothesize that this is due to too many irrelevant samples distracting the LLM.
Better LLMs lead to better performance. This can be clearly seen when comparing the numbers for GPT-4 and GPT-3.5. Nonetheless, we emphasize that GPT-3.5’s performance as
Comparison with HELPER and Dynamic CaP. As a key difference to our method, HELPER learns from successful trials by storing them as an example, while our method only inspects erroneous experiences and then stores improved versions thereof. The experimental results show that this strategy is more effective, leading to higher
Dynamic CaP improves performance over plain CaP, but it cannot compete with HELPER or our method. This confirms that our method of interactive Python console prompting is more effective than producing all code to solve the task at once. Furthermore, we can observe that learning from successful trials helps with seen instructions by reinforcing correct behavior, but it does not transfer to unseen instructions. Note that this observation also applies to HELPER, but mainly to
Further results. Supplementary Appendix C presents two additional experiments: first, we investigate the effect of
5 Real-world demonstration
To demonstrate the utility of our proposed prompt-based incremental learning technique, we perform experiments on the real-world humanoid robot ARMAR-6 (Asfour et al., 2018). We first provide challenging commands which the LLM initially solves incompletely or wrongly. Then, the human interactively provides feedback and tells the robot how to improve. Afterward, we not only provide the same command again to check for improved behavior but, in order to study generalization, also try similar commands that initially (i.e., before learning) led to similar mistakes. Details on the implementation of these experiments, especially on the API exposed to the LLM, can be found in Supplementary Appendix D. The system is connected to a memory-centric cognitive robot architecture where the memory mediates between high-level components and low-level abilities (see Figure 4). Specifically, the API provided to the LLM allows querying the robot’s memory with functions to list all objects and location names (opt. with a given affordance), query sub-symbolic coordinates of objects or locations, or retrieve state information about specific objects. The robot’s memory is filled beforehand by the robot’s perception and cognition components. In our experiments, we use a mixture of predefined prior knowledge (e.g., about static objects in the scene) and online perception (e.g., object pose-detection, self-localization). Furthermore, the API allows invoking registered skills, behaviors, and movements of the robot, such as grasping, navigation, object placement, or handing objects to a human. However, we do not focus on scenarios where the involved skills themselves fail; rather, we focus on high-level semantic problems. Please refer to Supplementary Appendix D for further details.
We present three scenarios: improving plans to demonstrate complex improvement of suboptimal or unintended performance, learning user preferences to show how to adapt to non-generic task constraints, and adapting low-level parameters to demonstrate that our system can learn from vague user instructions. Demonstration videos can be found at https://lbaermann.github.io/interactive-incremental-robot-behavior-learning/.
5.1 Improving plans
In this scenario, we tell the robot that we want juice. The prior knowledge contains some similar interaction examples, picking up a single object and handing it over to the human. Thus, the task of bringing the juice is executed successfully. However, since the user needs a cup to drink, we further instruct the robot “can you also bring me a cup?,” which causes the robot to additionally hand over a cup. Afterward, we ask the robot to improve this behavior using “Thanks, but next time, can you do this both at once? You have two hands.”
Afterward, when given the same initial command again, the robot uses bimanual behavior to hand over both the juice and cup. Furthermore, the learned bimanuality generalizes to “can you bring something to drink to the table?” which does not use handover but places both objects on the table. Unfortunately, a further test with “can I have some milk, please?” shows the unimanual behavior again, so we again have to ask for a cup and trigger incremental learning. In the next session, we ask “hey, can you serve some drink?,” which correctly generalizes the behavior to use both hands to pick up a different drink and cup, but it misinterprets “serve” as performing a handover instead of putting it on the table. However, we can successfully trigger learning again by teaching “when I say serve, I mean that you should put it on the table,” and subsequent requests do behave as intended.
We conclude that our interactive, incremental learning system can flexibly generate complex behavior from concise improvement instructions. However, it is still challenging to robustly generalize from a single instruction to all the cases a human might have intended, as shown by the milk example, where a second correction was necessary for successful generalization. Improving this generalization capability should be a focus of future work.
5.2 Learning user preferences
As shown in Figure 1, in this scenario, we ask the robot to assist with cleaning the top of the fridge. The memory
In summary, this example demonstrates that our method can be used to learn task constraints or preferences that a user specifies, and this knowledge can be generalized to similar situations.
5.3 Adapting low-level parameters
In this scenario, we ask the robot to bring some object from the table to the workbench (details in Supplementary Appendix E3). Subsequently, we say “remember that the route from the table to the bench is safe, you can go faster.”
Listing 2. When asked to move faster on a specific route,
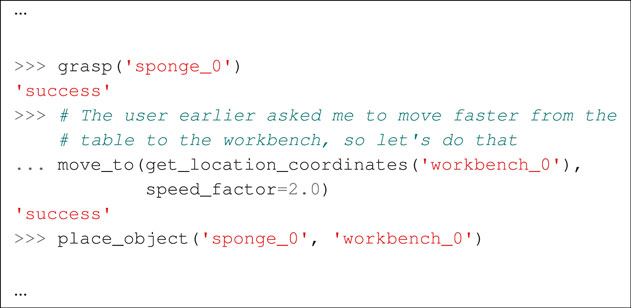
Proceeding requests now behave correctly and increase the speed from the table to the workbench. However, an adversarial test shows that
To conclude, our system can successfully learn to adapt low-level API parameters as requested by a user, but ensuring that the LLM applies learned knowledge in the intended context only is not fully solved yet.
6 Conclusion and discussion
We present a system for integrating an LLM as the central part of high-level orchestration of a robot’s behavior in a closed interaction loop. Memorizing interaction examples from experience and retrieving them based on the similarity to the current user request allows for dynamic construction of prompts and enables the robot to incrementally learn from mistakes by extending its episodic memory with interactively improved code snippets. We describe our implementation of the system in the robot software framework ArmarX (Vahrenkamp et al., 2015) and on the humanoid robot ARMAR-6 (Asfour et al., 2018). The usefulness of our approach is evaluated both quantitatively on the tasks from Code as Policies (Ahn et al., 2022) and qualitatively on a humanoid robot in the real world.
Although the proposed method, in particular the incremental prompt learning strategy, shows promising results, there are still many open questions for real-world deployment. First of all, the performance of LLMs is quite sensitive to wording in the prompt, thus sometimes leading to unpredictable behavior despite only slight variations in the input (e.g., adding “please” in the user command). This might be solved with more advanced models in the future as we did observe this issue more often with GPT-3.5 than with GPT-4. Investigating the effect and performance of example retrieval in dynamic prompt construction might also contribute to improving robustness. Furthermore, our incremental prompt learning strategy should be expanded to involve additional human feedback before saving (potentially wrong) interaction examples to the episodic memory. However, this is challenging to accomplish if the user is not familiar with robotics or programming languages. One possible approach would be to verbalize the improved interaction example using an LLM, present it to the user, and ask for confirmation. Similarly, the improved code could first be executed in a simulation environment to check its validity before saving it in the memory of interaction examples. Both approaches have some open challenges, such as ensuring correctness of the verbalization or accuracy of the simulation as there will be a large sim-to-real gap for the type of behaviors considered in our paper. To rigorously evaluate our incremental learning method in the real world, future work may want to incorporate a user study with non-technical participants. Further work should also focus on abstraction of similar behavior and forgetting of irrelevant learned behavior. Although our system is limited by the APIs exposed to the LLM, it could be combined with complementary approaches (Parakh et al., 2023) to support learning of new low-level skills, which would then be exposed through new functions added to the API. Furthermore, designing an API that enables robust yet flexible interactions is a challenge that should be considered in future work. In particular, providing the LLM access to sub-symbolic parameters (such as positions to navigate to) enables fine-grained user corrections (“move a little more to the left”), but it can significantly harden the task for the LLM and entails many more failure cases. Moreover, although we provide the LLM with access to perception functions and examples of how to use them, it sometimes comes up with non-grounded behavior (e.g., referring to non-existing objects or locations). This may be improved by adding further levels of feedback to the LLM or using strategies like Grounded Decoding (Huang et al., 2023). Finally, our system inherits biases and other flaws from its LLM (Bender et al., 2021), which may lead to problematic utterances and behaviors. In future work, we will try to address some of these challenging questions to further push the boundaries of natural, real-world interactions with humanoid robots.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Ethics statement
Written informed consent was obtained from the individual(s) for the publication of any identifiable images or data included in this article.
Author contributions
LB: conceptualization, investigation, methodology, software, visualization, writing–original draft, and writing–review and editing. RK: conceptualization, investigation, methodology, software, visualization, writing–original draft, and writing–review and editing. FP-K: conceptualization, investigation, methodology, software, visualization, writing–original draft, and writing–review and editing. JN: conceptualization, methodology, supervision, and writing–review and editing. AW: conceptualization, funding acquisition, project administration, supervision, and writing–review and editing. TA: conceptualization, funding acquisition, project administration, supervision, and writing–review and editing.
Funding
The authors declare financial support was received for the research, authorship, and/or publication of this article. This work has been supported by the Baden-Württemberg Ministry of Science, Research, and the Arts (MWK) as part of the state’s “digital@bw” digitization strategy in the context of the Real-World Lab “Robotics AI” and by the Carl Zeiss Foundation through the JuBot project.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The authors declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2024.1455375/full#supplementary-material
References
Ahmed, A., Azab, S., and Abdelhamid, Y. (2023). “Source-code generation using deep learning: a survey,” in Progress in artificial intelligence (Springer Nature Switzerland), 14116, 467–482. doi:10.1007/978-3-031-49011-8_37
Ahn, M., Brohan, A., Brown, N., Chebotar, Y., Cortes, O., David, B., et al. (2022). Do as i can, not as i say: grounding language in robotic affordances. Annu. Conf. Rob. Learn.
Asfour, T., Kaul, L., Wächter, M., Ottenhaus, S., Weiner, P., Rader, S., et al. (2018). “ARMAR-6: a collaborative humanoid robot for industrial environments,” in IEEE-RAS International Conference on Humanoid Robots, Beijing, China, November 06–09, 2018 (IEEE), 447–454.
Bao, J., Hong, Z., Tang, H., Cheng, Y., Jia, Y., and Xi, N. (2016). “Teach robots understanding new object types and attributes through natural language instructions,” in IEEE International Conference on Sensing Technology, Nanjing, China, November 11–13, 2016 (IEEE), 1–6.
Bender, E. M., Gebru, T., McMillan-Major, A., and Shmitchell, S. (2021). “On the dangers of stochastic parrots: can language models be too big?,” in 2021 ACM Conference on Fairness, Accountability, and Transparency, Virtual Event Canada, March 3–10, 2021, 610–623.
Birr, T., Pohl, C., Younes, A., and Asfour, T. (2024). “Autogpt+p: affordance-based task planning using large language models,” in Proceedings of robotics: science and systems. Delft, Netherlands. doi:10.18653/v1/2022.emnlp-main.644
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D., Dhariwal, P., et al. (2020). Language models are few-shot learners. Int. Conf. Neural Inf. Process. Syst. 33, 1877–1901. doi:10.5555/3495724.349588
Chen, M., Tworek, J., Jun, H., Yuan, Q., Pinto, H. P. d. O., Kaplan, J., et al. (2021). Evaluating large language models trained on code. arXiv:2107.03374
Dalvi Mishra, B., Tafjord, O., and Clark, P. (2022). Towards teachable reasoning systems: using a dynamic memory of user feedback for continual system improvement. Conf. Emp. Meth. Nat. Lang. Proc., 9465–9480. doi:10.18653/v1/2022.emnlp-main.644
Dehaerne, E., Dey, B., Halder, S., De Gendt, S., and Meert, W. (2022). Code generation using machine learning: a systematic review. IEEE Access 10, 82434–82455. doi:10.1109/ACCESS.2022.3196347
Fasola, J., and Matarić, M. J. (2013). Using semantic fields to model dynamic spatial relations in a robot architecture for natural language instruction of service robots. IEEE/RSJ Int. Conf. Intel. Rob. Syst. 32, 143–150. doi:10.1109/iros.2013.6696345
Forbes, M., Rao, R., Zettlemoyer, L., and Cakmak, M. (2015). “Robot programming by demonstration with situated spatial language understanding,” in IEEE International Conference on Robotics and Automation, Seattle, WA, May 26–30, 2015 (IEEE).
Google (2023). Code-chat (Google VertexAI). Available at: https://cloud.google.com/vertex-ai/generative-ai/docs/model-reference/code-chat (Accessed April 11, 2024).
Guadarrama, S., Riano, L., Golland, D., Göhring, D., Jia, Y., Klein, D., et al. (2013). Grounding spatial relations for human-robot interaction. IEEE/RSJ Int. Conf. Intel. Rob. Syst. 21, 1640–1647. doi:10.1109/iros.2013.6696569
Haluptzok, P., Bowers, M., and Kalai, A. T. (2023). “Language models can teach themselves to program better,” in International Conference on Learning Representations. Kigali Rwanda (Accessed May 1–5, 2023).
Huang, W., Abbeel, P., Pathak, D., and Mordatch, I. (2022a). Language models as zero-shot planners: extracting actionable knowledge for embodied agents. Int. Conf. Mach. Learn. 162, 9118–9147.
Huang, W., Xia, F., Shah, D., Driess, D., Zeng, A., Lu, Y., et al. (2023). Grounded decoding: guiding text generation with grounded models for robot control. arXiv:2303.00855
Huang, W., Xia, F., Xiao, T., Chan, H., Liang, J., Florence, P., et al. (2022b). “Inner monologue: embodied reasoning through planning with language models,” in Annual Conference on Robot Learning. Auckland, New Zealand. (Accessed December 14–18, 2022).
Kartmann, R., and Asfour, T. (2023). Interactive and incremental learning of spatial object relations from human demonstrations. Front. Robotics AI 10, 1151303. doi:10.3389/frobt.2023.1151303
Krüger, N., Geib, C., Piater, J., Petrick, R., Steedman, M., Wörgötter, F., et al. (2011). Object–Action Complexes: grounded abstractions of sensory–motor processes. Rob. Auton. Sys. 59, 740–757. doi:10.1016/j.robot.2011.05.009
Lahiri, S. K., Fakhoury, S., Naik, A., Sakkas, G., Chakraborty, S., Musuvathi, M., et al. (2023). Interactive code generation via test-driven user-intent formalization. arXiv:2208.05950
Le, H., Wang, Y., Gotmare, A. D., Savarese, S., and Hoi, S. C. H. (2022). CodeRL: mastering code generation through pretrained models and deep reinforcement learning. Int. Conf. Neural Inf. Process. Syst. 35, 21314–21328. doi:10.5555/3600270.3601819
Liang, J., Huang, W., Xia, F., Xu, P., Hausman, K., Ichter, B., et al. (2023). “Code as policies: language model programs for embodied control,” in IEEE International Conference on Robotics and Automation, London, United Kingdom, May 29–June 02, 2023 (IEEE), 9493–9500.
Liu, J., Shen, D., Zhang, Y., Dolan, B., Carin, L., and Chen, W. (2022). “What makes good in-context examples for GPT-3?,” in Proceedings of Deep Learning Inside Out: The 3rd Workshop on Knowledge Extraction and Integration for Deep Learning Architectures, Dublin, Ireland (Association for Computational Linguistics), 100–114. doi:10.18653/v1/2022.deelio-1.10
Liu, X., Yu, H., Zhang, H., Xu, Y., Lei, X., Lai, H., et al. (2024). “AgentBench: evaluating LLMs as agents,” in International Conference on Learning RepresentationsVienna Austria (Accessed May 7–11, 2024).
Luo, M., Xu, X., Dai, Z., Pasupat, P., Kazemi, M., Baral, C., et al. (2023). Dr.ICL: demonstration-retrieved in-context learning. arXiv:2305.14128
Madaan, A., Tandon, N., Clark, P., and Yang, Y. (2022a). Memory-assisted prompt editing to improve GPT-3 after deployment. Conf. Emp. Meth. Nat. Lang. Proc., 2833–2861. doi:10.18653/v1/2022.emnlp-main.183
Madaan, A., Zhou, S., Alon, U., Yang, Y., and Neubig, G. (2022b). Language models of code are few-shot commonsense learners. Conf. Emp. Meth. Nat. Lang. Proc., 1384–1403. doi:10.18653/v1/2022.emnlp-main.90
Mialon, G., Dessi, R., Lomeli, M., Nalmpantis, C., Pasunuru, R., Raileanu, R., et al. (2023). Augmented language models: a survey. Trans. Mach. Learn. Res.
Misra, D. K., Sung, J., Lee, K., and Saxena, A. (2016). Tell me Dave: context-sensitive grounding of natural language to manipulation instructions. Int. J. Rob. Res. 35, 281–300. doi:10.1177/0278364915602060
Mohan, S., and Laird, J. (2014). Learning goal-oriented hierarchical tasks from situated interactive instruction. AAAI 28. doi:10.1609/aaai.v28i1.8756
Nicolescu, M., Arnold, N., Blankenburg, J., Feil-Seifer, D., Banisetty, S. B., Nicolescu, M., et al. (2019). “Learning of complex-structured tasks from verbal instruction,” in IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, October 15–17, 2019 (IEEE), 770–777.
Nijkamp, E., Pang, B., Hayashi, H., Tu, L., Wang, H., Zhou, Y., et al. (2023). “CodeGen: an open large language model for code with multi-turn program synthesis,” in International Conference on Learning Representations, Kigali, Rwanda, May 1–5, 2023.
OpenAI (2023a). ChatGPT. Available at: https://openai.com/blog/chatgpt/ (Accessed July 03, 2023).
Ouyang, L., Wu, J., Jiang, X., Almeida, D., Wainwright, C. L., Mishkin, P., et al. (2022). Training language models to follow instructions with human feedback. Int. Conf. Neural Inf. Process. Syst. 35, 27730–27744. doi:10.5555/3600270.3602281
Parakh, M., Fong, A., Simeonov, A., Gupta, A., Chen, T., and Agrawal, P. (2023). Lifelong robot learning with human assisted language planners. Work. learn. Eff. Abstr. Plan. CoRL.
Peller-Konrad, F., Kartmann, R., Dreher, C. R. G., Meixner, A., Reister, F., Grotz, M., et al. (2023). A memory system of a robot cognitive architecture and its implementation in ArmarX. Rob. Auton. Sys. 164, 104415. doi:10.1016/j.robot.2023.104415
Pramanick, P., Barua, H. B., and Sarkar, C. (2020). DeComplex: task planning from complex natural instructions by a collocating robot. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, October 24, 2020–January 24, 2021 (IEEE), 8. doi:10.1109/IROS45743.2020.9341289
Qin, Y., Hu, S., Lin, Y., Chen, W., Ding, N., Cui, G., et al. (2023). Tool learning with foundation models. arXiv:2304.08354
Reimers, N., and Gurevych, I. (2019). Sentence-BERT: sentence embeddings using siamese BERT-networks. Conf. Emp. Meth. Nat. Lang. Proc., 3982–3992. doi:10.18653/v1/D19-1410
Ren, A. Z., Dixit, A., Bodrova, A., Singh, S., Tu, S., Brown, N., et al. (2023). “Robots that ask for help: uncertainty alignment for large language model planners,” in Conference on Robot Learning (CoRL), Atlanta, USA, November 6–9, 2023.
Sarch, G., Wu, Y., Tarr, M., and Fragkiadaki, K. (2023). Open-ended instructable embodied agents with memory-augmented large language models. Conf. Emp. Meth. Nat. Lang. Proc., 3468–3500. doi:10.18653/v1/2023.findings-emnlp.226
Shridhar, M., Mittal, D., and Hsu, D. (2020). INGRESS: interactive visual grounding of referring expressions. Int. J. Rob. Res. 39, 217–232. doi:10.1177/0278364919897133
Singh, I., Blukis, V., Mousavian, A., Goyal, A., Xu, D., Tremblay, J., et al. (2023). “ProgPrompt: generating situated robot task plans using large language models,” in International Conference on Robotics and Automation (ICRA), London, United Kingdom, May 29–June 2, 2023, 11523–11530.
Skreta, M., Yoshikawa, N., Arellano-Rubach, S., Ji, Z., Kristensen, L. B., Darvish, K., et al. (2023). Errors are useful prompts: instruction guided task programming with verifier-assisted iterative prompting. arXiv:2303.14100
Song, C. H., Wu, J., Washington, C., Sadler, B. M., Chao, W.-L., and Su, Y. (2023). “LLM-planner: few-shot grounded planning for embodied agents with large language models,” in International Conference on Computer Vision (ICCV), Paris, France, October 01–06, 2023 (IEEE), 2998–3009.
Tellex, S., Gopalan, N., Kress-Gazit, H., and Matuszek, C. (2020). Robots that use language: a survey. Annu. Rev. Control Rob. Auton. Sys. 3, 25–55. doi:10.1146/annurev-control-101119-071628
Tellex, S., Kollar, T., Dickerson, S., Walter, M. R., Banerjee, A. G., Teller, S., et al. (2011). Understanding natural language commands for robotic navigation and mobile manipulation. AAAI 25 (1), 1507–1514. doi:10.1609/aaai.v25i1.7979
Touvron, H., Lavril, T., Izacard, G., Martinet, X., Lachaux, M.-A., Lacroix, T., et al. (2023). LLaMA: open and efficient foundation language models. arXiv:2302.13971
Vahrenkamp, N., Wächter, M., Kröhnert, M., Welke, K., and Asfour, T. (2015). The robot software framework ArmarX. it - Inf. Technol. 57, 99–111. doi:10.1515/itit-2014-1066
Vemprala, S., Bonatti, R., Bucker, A., and Kapoor, A. (2023). ChatGPT for robotics: design principles and model abilities. Available at: https://www.microsoft.com/en-us/research/publication/chatgpt-for-robotics-design-principles-and-model-abilities/ (Accessed February 22, 2023).
Wake, N., Kanehira, A., Sasabuchi, K., Takamatsu, J., and Ikeuchi, K. (2023). ChatGPT empowered long-step robot control in various environments: a case application. IEEE Access 11, 95060–95078. doi:10.1109/access.2023.3310935
Walter, M., Hemachandra, S., Homberg, B., Tellex, S., and Teller, S. (2013). “Learning semantic maps from natural language descriptions,” in Proceedings of the 2013 Robotics: Science and Systems IX Conference, Berlin, Germany, June 24–28, 2013.
Wang, G., Xie, Y., Jiang, Y., Mandlekar, A., Xiao, C., Zhu, Y., et al. (2024). Voyager: an open-ended embodied agent with large language models. Trans. Mach. Learn. Res.
Wang, J., and Chen, Y. (2023). A review on code generation with LLMs: application and evaluation. Int. Conf. Med. Art. Intel. 32, 284–289. doi:10.1109/MedAI59581.2023.00044
Wang, X., Wang, Z., Liu, J., Chen, Y., Yuan, L., Peng, H., et al. (2024). “MINT: evaluating LLMs in multi-turn interaction with tools and language feedback,” in International Conference on Learning Representations, Vienna Austria, May 7–11, 2024.
Wang, Z., Zhang, G., Yang, K., Shi, N., Zhou, W., Hao, S., et al. (2023). Interactive natural language processing. arXiv:2305.13246
Wei, J., Wang, X., Schuurmans, D., Bosma, M., ichter, b., Xia, F., et al. (2022). “Chain-of-thought prompting elicits reasoning in large language models,” in International Conference on Neural Information Processing Systems, New Orleans, United States, November 28–December 09, 2022.
Weigelt, S., Steurer, V., Hey, T., and Tichy, W. F. (2020). “Programming in natural language with fuSE: synthesizing methods from spoken utterances using deep natural language understanding,” in Proceedings of the 58th annual meeting of the association for computational linguistics (Association for Computational Linguistics), 4280–4295.
Wu, J., Antonova, R., Kan, A., Lepert, M., Zeng, A., Song, S., et al. (2023). TidyBot: personalized robot assistance with large language models. Auton. Robots 47, 1087–1102. arXiv:2305.05658. doi:10.1007/s10514-023-10139-z
Yang, J., Prabhakar, A., Narasimhan, K., and Yao, S. (2023). “InterCode: standardizing and benchmarking interactive coding with execution feedback,” in Proceedings of the 37th International Conference on Neural Information Processing System, New Orleans, LA, December 10–16, 2023 (Curran Associates Inc.), 23826–23854.36
Yang, K., Liu, J., Wu, J., Yang, C., Fung, Y., Li, S., et al. (2024). “If LLM is the wizard, then code is the wand: a survey on how code empowers large language models to serve as intelligent agents,” in ICLR 2024 Workshop on LLM Agents, Vienna, Austria, May 11, 2024.
Yao, S., Zhao, J., Yu, D., Du, N., Shafran, I., Narasimhan, K. R., et al. (2023). “ReAct: synergizing reasoning and acting in language models,” in International Conference on Learning Representations, Kigali, Rwanda, May 1–5, 2023.
Ye, J., Wu, Z., Feng, J., Yu, T., and Kong, L. (2023). Compositional exemplars for in-context learning. arXiv:2302.05698
Zeng, A., Attarian, M., ichter, b., Choromanski, K. M., Wong, A., Welker, S., et al. (2023). “Socratic models: composing zero-shot multimodal reasoning with language,” in International Conference on Learning Representations, Kigali, Rwanda, May 1–5, 2023.
Zha, L., Cui, Y., Lin, L.-H., Kwon, M., Arenas, M. G., Zeng, A., et al. (2023). “Distilling and retrieving generalizable knowledge for robot manipulation via language corrections,” in Work. Lang. Robot learn., CoRL.
Keywords: incremental learning, human–robot interaction, cognitive modeling, knowledge representation for robots, humanoid robots, large language models
Citation: Bärmann L, Kartmann R, Peller-Konrad F, Niehues J, Waibel A and Asfour T (2024) Incremental learning of humanoid robot behavior from natural interaction and large language models. Front. Robot. AI 11:1455375. doi: 10.3389/frobt.2024.1455375
Received: 26 June 2024; Accepted: 06 September 2024;
Published: 10 October 2024.
Edited by:
Yan Wu, Institute for Infocomm Research (A∗STAR), SingaporeReviewed by:
Ruohan Wang, Institute for Infocomm Research (A∗STAR), SingaporeYixing Gao, Imperial College London, United Kingdom
Qianli Xu, Institute for Infocomm Research (A∗STAR), Singapore
Copyright © 2024 Bärmann, Kartmann, Peller-Konrad, Niehues, Waibel and Asfour. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Leonard Bärmann, YmFlcm1hbm5Aa2l0LmVkdQ==