Task Roadmaps: Speeding up Task Replanning
 Anders Lager
Anders Lager Giacomo Spampinato2
Giacomo Spampinato2 Alessandro V. Papadopoulos
Alessandro V. PapadopoulosA Corrigendum on
Task Roadmaps: Speeding Up Task Replanning
by Lager A, Spampinato G, Papadopoulos AV and Nolte T (2022) Front. Robot. AI 9:816355. doi: 10.3389/frobt.2022.816355
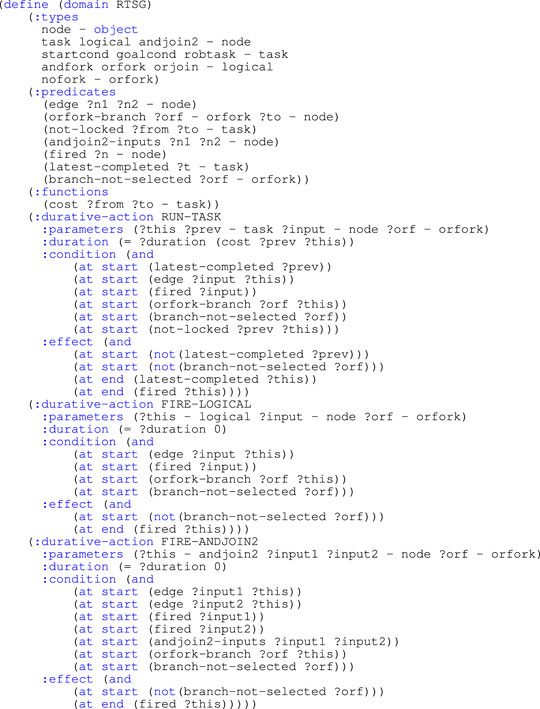
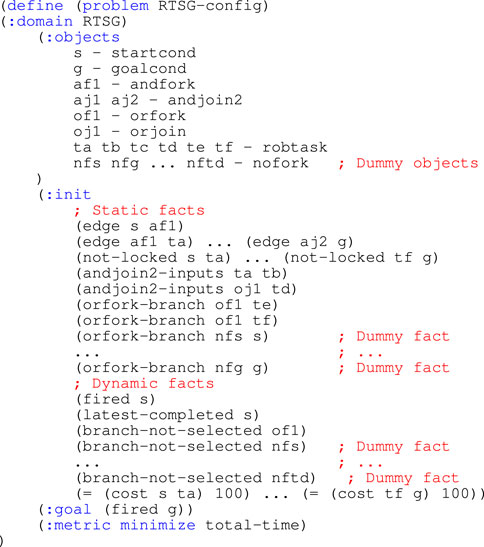
In the original article, Listings 1 and 2 were not included during the typesetting process and were overlooked during production. The missing listings appear below.
Listing 1. PDDL domain
Listing 2.. PDDL problem
The authors apologize for this error and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Keywords: autonomous robots, task planning, optimization, ROS, robot task modelling
Citation: Lager A, Spampinato G, Papadopoulos AV and Nolte T (2022) Corrigendum: Task Roadmaps: Speeding Up Task Replanning. Front. Robot. AI 9:940811. doi: 10.3389/frobt.2022.940811
Received: 10 May 2022; Accepted: 31 May 2022;
Published: 30 June 2022.
Edited and reviewed by:
Giovanni Indiveri, University of Genoa, ItalyCopyright © 2022 Lager, Spampinato, Papadopoulos and Nolte. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Alessandro V. Papadopoulos, YWxlc3NhbmRyby5wYXBhZG9wb3Vsb3NAbWR1LnNl