 Qianqian Wang
Qianqian Wang Shaolin He2
Shaolin He2- 1School of Intelligent Transportation, Hunan Communication Polytechnic, Changsha, China
- 2State Grid Changsha Power Supply Company, Changsha, China
Introduction: With the continuous progress of the automotive industry, the safe driving of intelligent vehicles has received increasing attention. Traditional obstacle avoidance techniques are not accurate enough in dealing with fuzzy information encountered in high-speed driving. Therefore, this study aims to improve the obstacle avoidance ability of intelligent vehicles through fuzzy control theory.
Methods: The study employs fuzzy control theory to enhance the ability of intelligent vehicles to process fuzzy information, thereby improving conventional obstacle avoidance techniques. A combination of visual sensing and ultrasonic detection equipment was used to comprehensively plan the real-time obstacle avoidance routes of the intelligent vehicle.
Results and Discussion: The improved obstacle avoidance technique achieves an accuracy of 96.11%, which is better than the comparison avoidance technique. In the absence of interfering signals, the running time and overshoot were 2.4 s and 7%, respectively, again superior to the comparison technique. The experimental results show that the obstacle avoidance technique proposed in this study can improve the recognition ability of intelligent vehicles on fuzzy information, so as to improve the accuracy of obstacle recognition and provide certain guarantee for the safe driving of intelligent vehicles.
1 Introduction
The history of automobiles has been over a hundred years, from the initial steam three-wheeled vehicles to the current new energy four-wheeled vehicles. After continuous innovation and improvement, convenience, safety, and green are the basic requirements for automobiles (Xie et al., 2022; Li W. et al., 2020). The development of automobiles cannot be separated from the technical support of various industries. With the widespread application of intelligent technology, intelligent cars have begun to enter people’s vision (Song and Li, 2022; Thomas et al., 2020; Colombaroni et al., 2020). Various countries attach great importance to the development of intelligent vehicles, especially its safety. The ability to avoid obstacles on the road is a crucial aspect of safe driving for intelligent vehicles. However, traditional obstacle avoidance technologies have insufficient recognition and detection capabilities for fuzzy information encountered by intelligent vehicles during the driving process, which cannot ensure that intelligent vehicles can successfully avoid obstacles with fuzzy information. At present, there are many studies on obstacle avoidance in drone technology. Yasin J N et al. monitored the surrounding environment of the drone in real time through visual sensing. The drone’s route in dynamic environments was planned using collision theory, achieving effective obstacle avoidance during drone navigation (Yasin et al., 2020). Huang et al. utilized visual collision avoidance technology to improve the navigation stability of unmanned aerial vehicles and ensure the safety of operating routes. Therefore, visual obstacle avoidance had a good application effect on obstacle avoidance route planning for dynamic routes (Huang et al., 2019). Regarding the route control of intelligent vehicles, this study focuses on the strong processing ability of fuzzy information based on fuzzy control theory. It uses fuzzy control theory to compensate for the shortcomings of traditional obstacle avoidance techniques and improve traditional intelligent vehicle obstacle avoidance techniques. By combining visual sensing and ultrasonic detection equipment, the real-time obstacle avoidance route of intelligent vehicles is comprehensively planned. The braking safety distance is adjusted by limiting the distance to the front vehicle, and the obstacle recognition ability in the front area is optimized using fuzzy control theory. Based on the offset angle control, the obstacle avoidance route planning is achieved to improve the obstacle avoidance ability of intelligent vehicles, providing better guarantees for the safe driving of intelligent vehicles and promoting further development of automobiles. The first part of this study introduces the current research status of intelligent vehicles obstacle avoidance and fuzzy control theory. The second part provides a detailed introduction to intelligent vehicles obstacle avoidance, as well as its shortcomings. Fuzzy control theory is used to improve the obstacle avoidance technology. The third part conducts comparative performance testing and actual application effect analysis on the improved technology. The fourth part is to summarize the research results.
2 Related works
With the reform of the automotive industry and the continuous progress of science and technology, intelligent vehicles have become one of the focuses, among which the safe driving of intelligent vehicles has received the most attention. Based on this, some scholars have conducted in-depth research on the intelligent vehicle obstacle avoidance technology. Liu et al. proposed a parameterized spatio-temporal curve interpolation model based on a layered collision avoidance strategy to address the low accuracy of intelligent vehicles in high-speed motion. Through empirical analysis, it constructed accurate collision avoidance conditions, thereby improving the obstacle avoidance accuracy of intelligent vehicles during high-speed driving (Liu et al., 2020). Wahid et al. proposed an adaptive motion planning strategy based on the regional change of obstacle position and collision speed to solve the low ability of intelligent vehicles to avoid speed changing obstacles. Through comparative test analysis, the results showed that the error of intelligent vehicles to avoid speed changing obstacles was reduced by 26% (Wahid et al., 2020). Ferraz et al. proposed a three-stage architecture based on convolutional neural network and transfer learning to solve the low accuracy of intelligent vehicles in detecting obstacles. The results showed that the average accuracy using this architecture in detecting obstacles increased by 3.96% (Ferraz et al., 2020). Chen and Zhang proposed a dynamic pedestrian intelligent vehicle collision avoidance path planning based on a joint attention mechanism long and short memory network to address the poor pedestrian detection and avoidance ability of intelligent vehicles when there was no signal. The results showed that this path planning could improve the ability of intelligent vehicles to avoid pedestrians and ensure safe driving (Chen and Zhang, 2022). Pan et al. proposed a multi-target recognition method based on the single line LiDAR and monocular vision to address the low accuracy in identifying obstacles in intelligent vehicles. Through comparative experimental analysis, the results showed that this method could effectively and accurately identify obstacles in intelligent vehicles, improving their ability to recognize obstacles (Pan et al., 2021).
Fuzzy control theory is a nonlinear intelligent control that can solve uncertainty problems in complex systems or processes by establishing language analysis. Therefore, it is widely applied in various fields. Abbasi and Jalali proposed a second-order dynamical system based on fuzzy control theory to address traditional dynamical systems being unable to accurately determine parameters. After empirical analysis, the results showed that the system had fuzzy parameters, which could output views more comprehensively and better control the system (Abbasi and Jalali, 2020). Tong et al. proposed an adaptive fuzzy feedback control system based on fuzzy control theory to solve the unknown virtual functions in the feedback nonlinear system. Through simulation analysis, the results showed that the system could control the unknown virtual functions to be constant, and ensure that the error was within the small neighborhood of the origin (Tong et al., 2020). Ahanda et al. proposed a virtual adaptive control scheme that integrated fuzzy control theory to address the poor finite time stability in robot closed-loop systems. After comparative experiments, the results showed that this scheme could effectively improve the finite time stability of the closed-loop system (Ahanda et al., 2020). Li et al. proposed a fuzzy containment control method integrating fuzzy control theory to solve the containment control input delay in nonlinear multi-agent system. The results showed that this control method could reduce the input delay of containment control, thus improving the working efficiency of nonlinear multi-agent system (Li Y. et al., 2020). In view of the high grain loss rate in traditional combine harvester, Xu et al. proposed a control strategy using fuzzy theory to reduce the loss rate. Through comparative test analysis, the results showed that the combine harvester using this strategy could significantly reduce the grain loss rate, which was reduced by 29.6% at most (Xu et al., 2020).
In summary, many scholars have applied various high-tech technologies to improve the obstacle avoidance ability of intelligent vehicles. Meanwhile, fuzzy control theory has also shown excellent performance in various fields. The research value of combining the two is enormous. However, the research that combines these two is not common nowadays. In order to fill the gap in this research field, the research combines fuzzy control theory with intelligent vehicle obstacle avoidance strategies. It is hoped that this study can improve the obstacle avoidance ability of intelligent vehicles and provide some data support for its further development.
3 Intelligent vehicle obstacle avoidance technology integrating fuzzy control theory
With the development of science and technology, intelligent cars are gradually entering the public eye. People are very concerned about the development of intelligent vehicles, and traditional intelligent vehicle obstacle avoidance technology has a low accuracy in identifying fuzzy information. Based on this research background, this chapter combines traditional obstacle avoidance technology with fuzzy control theory to design an intelligent vehicles obstacle avoidance.
3.1 Sensor-based obstacle avoidance technology
Smart cars detect the surrounding environment through sensors and issue commands to avoid obstacles based on the detected information. The commonly used sensors for smart cars include infrared sensors, visual sensors, and ultrasonic sensors. Infrared sensor uses infrared for signal detection, which can detect objects based on the infrared light wavelength. Its ranging function can detect the distance between cars and obstacles (Suto et al., 2021). The distance measurement diagram is shown in Figure 1.
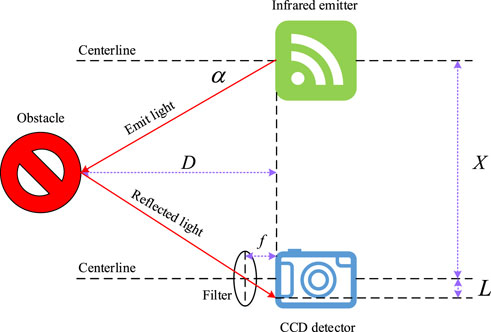
Figure 1. Schematic diagram of the infrared ranging principle.
As shown in Figure 1, the transmitter in the infrared sensor emits infrared light wavelength first. When the infrared light encounters an obstacle, it reflects back. The CCD detector automatically detects the reflected infrared light. The distance between the infrared sensor and the obstacle can be calculated, as shown in Equation 1.
In Equation 1,
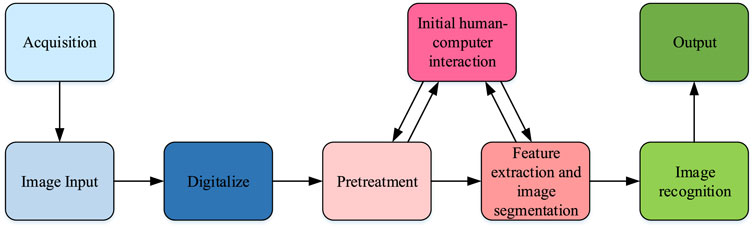
Figure 2. Visual system workflow.
In Figure 2, the dual frame difference method is commonly used in image processing, and its calculation process is shown in Equations 2, 3.
In Equation 2,
In Equation 3,
In Equation 4,
In Equation 5,
In Equation 6,
3.2 Improved obstacle avoidance technology based on fuzzy control theory
Fuzzy control theory is a computer-based digital control approach that relies on fuzzy set theory. It dispenses with the need to establish a comprehensive mathematical model system for the controlled object. Therefore, fuzzy control theory is often used to simplify systems and control nonlinear, time-varying and other systems. Given the strong processing ability of fuzzy control theory on fuzzy data, it is applied to improve the obstacle avoidance technology of intelligent vehicles and improve their accuracy in identifying obstacles when facing fuzzy data. Fuzzy control uses fuzzy mathematical relationships to identify and judge fuzzy objects, and then apply the fuzzy set obtained through fuzzy reasoning to the controlled object (Ejegwa and Agbetayo, 2023). The relationships between all objects in the fuzzy set are fuzzy and uncertain, and the relationships between objects can be expressed by membership functions. In other words, the fuzzy performance of a fuzzy set is reflected by membership functions (Saeed et al., 2022). There are four commonly used membership functions, the first of which is a triangular function, as shown in Equation 7.
In Equation 7,
In Equation 8, the center of the function graph can be determined by a point
In Equation 9, the center of the function graph can be determined by a point
In Equation 10, the opening direction of the function graph can be determined by point
In Equation 11,
In Equation 12,
In Equation 13,
In Equation 14,
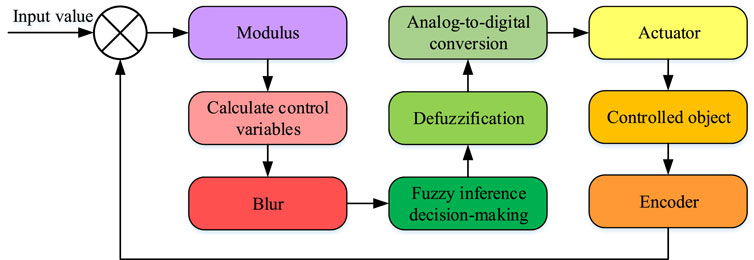
Figure 3. Flow chart of the fuzzy control system.
From Figure 3, in a fuzzy system, the fuzzy values obtained through fuzzy inference need to be subjected to inverse fuzzification, that is, to convert the fuzzy values into accurate values. The commonly used conversion method is the maximum membership decision method, which weights the maximum values of multiple membership degrees in the output fuzzy set and finally outputs the average value, as shown in Equation 15.
In Equation 15,
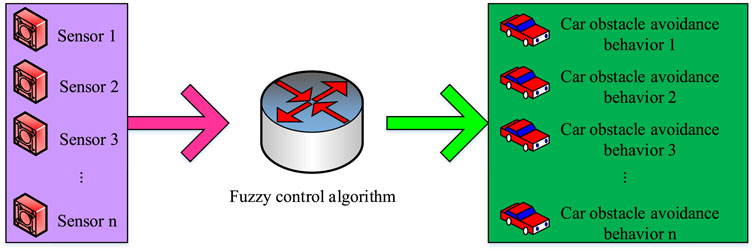
Figure 4. Schematic diagram of obstacle avoidance fuzzy control.
As shown in Figure 4, during the driving process of an intelligent car, sensors are used to collect information around the car, which is processed and transmitted to a fuzzy control system. The types of obstacles in this information are calculated and analyzed, and reasonable obstacle avoidance actions are made based on the types of obstacles.
3.3 Intelligent vehicle obstacle avoidance technology integrating fuzzy control theory
The obstacle avoidance technology of intelligent vehicles improved by fuzzy control theory can accurately identify obstacles encountered during the driving process, and issue obstacle avoidance commands to the vehicle based on the type of obstacle, enabling the intelligent vehicle to make reasonable obstacle avoidance behavior. The obstacle avoidance behavior of smart cars is mainly divided into three categories. To ensure the driving stability of the vehicle, it is necessary to first set the lateral control input content. The position of the driving vehicle is determined through visual sensing and ultrasonic sensing. The current road information and traffic data are obtained through network search. The speed and angle of travel under different states are set. The obstacle avoidance behavior of intelligent vehicles during the driving phase is mainly divided into three categories. When the intelligent vehicle encounters a sudden dynamic obstacle, it needs to stop driving immediately. This process is called the emergency obstacle avoidance behavior of intelligent vehicles. The direct target behavior of intelligent vehicles refers to the situation where the road surface is flat and there are no obstacles to prevent the intelligent vehicle from moving forward. Intelligent vehicle travel is determined by the direction of the destination. Taking into account the dynamic factors of the vehicle and the changes in kinetic energy during driving, the control system of the vehicle is optimized to improve its smoothness. The schematic diagram is shown in Figure 5A. The direct obstacle avoidance behavior of intelligent vehicles refers to the behavior of changing the travel direction based on the position of obstacles and the destination when obstacles are detected around the intelligent vehicle during driving. At the same time, the obstacle avoidance direction of the research design is mainly aimed at the 180° in front of the car, combined with visual detection devices to distinguish the vehicles ahead. The driving obstacle avoidance diagram is shown in Figure 5B.
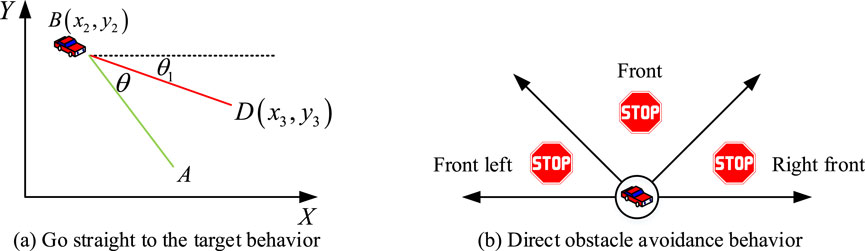
Figure 5. Two types of object avoidance behaviors of intelligent vehicles. (A) Go straight to the target behavior. (B) Direct obstacle avoidance behavior.
In Figure 5A,
In Equation 16, when
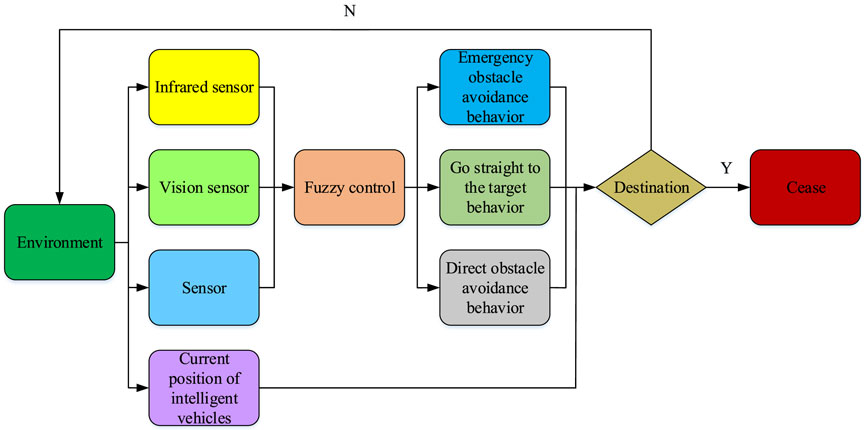
Figure 6. Flow chart of object avoidance of intelligent vehicles.
As shown in Figure 6, during the driving process of intelligent vehicles, real-time detection technologies such as infrared sensors, visual sensors, and ultrasonic sensors are used to collect information around the vehicle. Then, these data information are preliminarily processed and transformed, and transmitted to the fuzzy control system. After calculating and analyzing the fuzzy control system, the type of obstacles is judged and corresponding obstacle avoidance commands are issued to the intelligent vehicle. After the intelligent car successfully avoids obstacles, combined with the actual situation of the intelligent car and the destination situation, it is determined whether the intelligent car has arrived at the destination. When the car has already arrived at the destination, the obstacle avoidance work stops. Otherwise, the above workflow is repeated continuously until the intelligent car reaches the destination.
4 Performance testing of improved technology and empirical analysis of intelligent vehicle obstacle avoidance technology
In order to validate the obstacle avoidance technology based on fuzzy control theory proposed in the study, a simulation system for obstacle avoidance is built using Simulink. Comparative performance tests of obstacle avoidance technology are conducted on the Lostandround dataset, and evaluation indicators such as running time, overshoot, accuracy, PR curve, ROC curve, etc., are used. Subsequently, to verify the practical application effect of obstacle avoidance technology proposed in the research, an intelligent test car is self-made for comparative experiments, with the test car identifying obstacle types and route planning as evaluation indicators.
4.1 Comparative performance testing of improved obstacle avoidance technology
Performance comparison tests are conducted on the improved obstacle avoidance technology. The traditional obstacle avoidance technology and Proportional Integral Derivative Control (PID) are used as control groups. These three technologies are used to identify and detect data in the experimental dataset. The running time and overshoot results are shown in Figure 7.
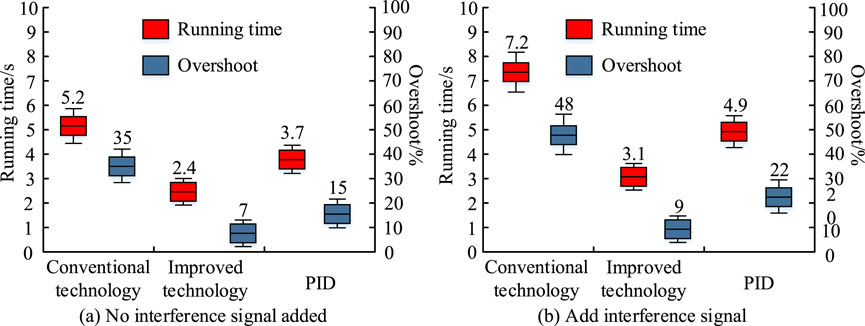
Figure 7. Running time and overshoot of the three object avoidance technologies. (A) No interference signal added. (B) Add interference signal.
As shown in Figure 7A, when no interference signal is added in the experiment, the running time of the improved obstacle avoidance technology was 2.4 s, and the overshoot was divided into 7%. The lower the overshoot value, the more stable it is. The running time of traditional obstacle avoidance technology was 5.2 s, with an overshoot of 35%. The running time of PID was 3.7 s, and the overshoot was 15%. This means that the improved obstacle avoidance technology is compared to the obstacle avoidance technology. In Figure 7B, adding interference signals in the experiment had an impact on the performance of all three obstacle avoidance technologies, with the improved obstacle avoidance technology extending the running time to 3.1 s and the overshoot increasing to 9%. The running time of traditional obstacle avoidance technology extended to 7.2 s, the overshoot increased to 48%, the PID running time extended to 4.9 s, and the overshoot increased to 22%, indicating that the improved obstacle avoidance technology had the strongest anti-interference ability. The recognition accuracy of the three obstacle avoidance technologies for obstacles after 1,000 iterations is shown in Figure 8.
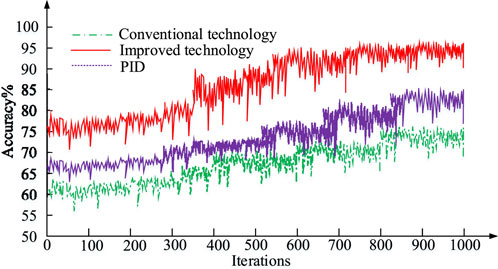
Figure 8. Accuracy of the three objective avoidance technologies.
As shown in Figure 8, the accuracy of the three obstacle avoidance technologies increased with the number of iterations. After running 1,000 iterations, the accuracy of traditional obstacle avoidance technology remained stable at 75.21%, PID at 85.47%, and the accuracy of improved obstacle avoidance technology remained stable at 96.11%. In the three experiments, the overall accuracy of the improved obstacle avoidance technology was significantly higher, and the convergence speed of this technology was also faster. When the iteration reached around 500, the accuracy of this technology tended to stabilize. The PR and ROC curves of the three obstacle avoidance technologies are shown in Figure 9.
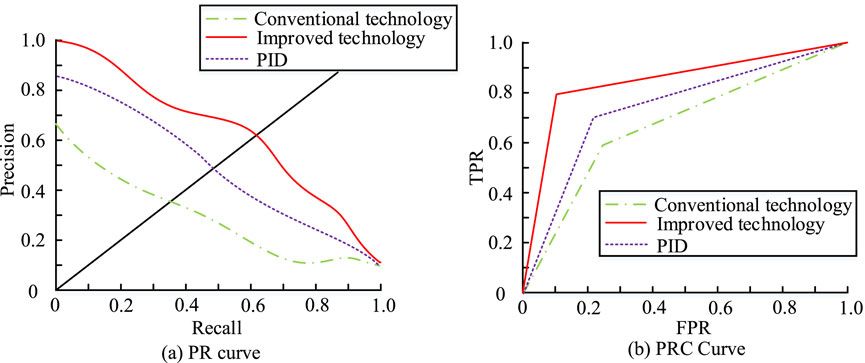
Figure 9. PR curves and ROC curves of the three objective avoidance technologies. (A) PR curve. (B) PRC Curve.
As shown in Figure 9A, the area under the PR curve of the improved obstacle avoidance technology was significantly larger than the other two obstacle avoidance technologies used for comparison, and the area was 0.81. From Figure 9B, the area under the ROC of the improved obstacle avoidance technology was significantly larger than that of comparison obstacle avoidance technologies, and this area was 0.87. From the evaluation indicators of PR curve and ROC, the improved obstacle avoidance technology is the best. Based on all the above evaluation indicators, the performance of improved obstacle avoidance technology is superior to that of comparison obstacle avoidance technologies.
4.2 Analysis of the practical application effect of intelligent vehicle obstacle avoidance technology
In the comparative experiment of the practical application effect of the improved obstacle avoidance technology, the driving situation of a self-made intelligent test car is used to simulate the driving situation of an intelligent car on the road. 300 obstacle data samples are randomly selected from the dataset and classified into three categories based on the direct obstacle avoidance behavior, emergency obstacle avoidance behavior, and direct target avoidance behavior of intelligent vehicles, labeled as 1, 2, and 3. During the driving process of the test car, these 300 obstacle data are input to observe whether the test vehicle can perform the correct obstacle avoidance behavior.
From Figure 10A, the test car using traditional obstacle avoidance technology had 50 incorrect obstacle avoidance behaviors, and the correct judgment rate for obstacles was 83%. In Figure 10B, the test car using PID obstacle avoidance technology had 25 incorrect obstacle avoidance behaviors, and the correct judgment rate for obstacles was 92%, with the most incorrect judgments for direct obstacle avoidance behavior and emergency obstacle avoidance behavior. In Figure 10C, the test car using improved obstacle avoidance technology had 18 incorrect obstacle avoidance behaviors, and the correct judgment rate for obstacles was 94%, with the most incorrect judgment for direct obstacle avoidance behavior. Based on the comprehensive Figures (a), (b), and (c), the improved obstacle avoidance technology can effectively reduce erroneous judgments about direct obstacle avoidance behavior and emergency obstacle avoidance behavior, while maintaining the lowest erroneous judgment about direct target avoidance behavior. The results indicate that the improved obstacle avoidance technology has the best practical application effect. The driving route planning results of three types of test vehicles when facing obstacles, combined with the destination position, are shown in Figure 11.
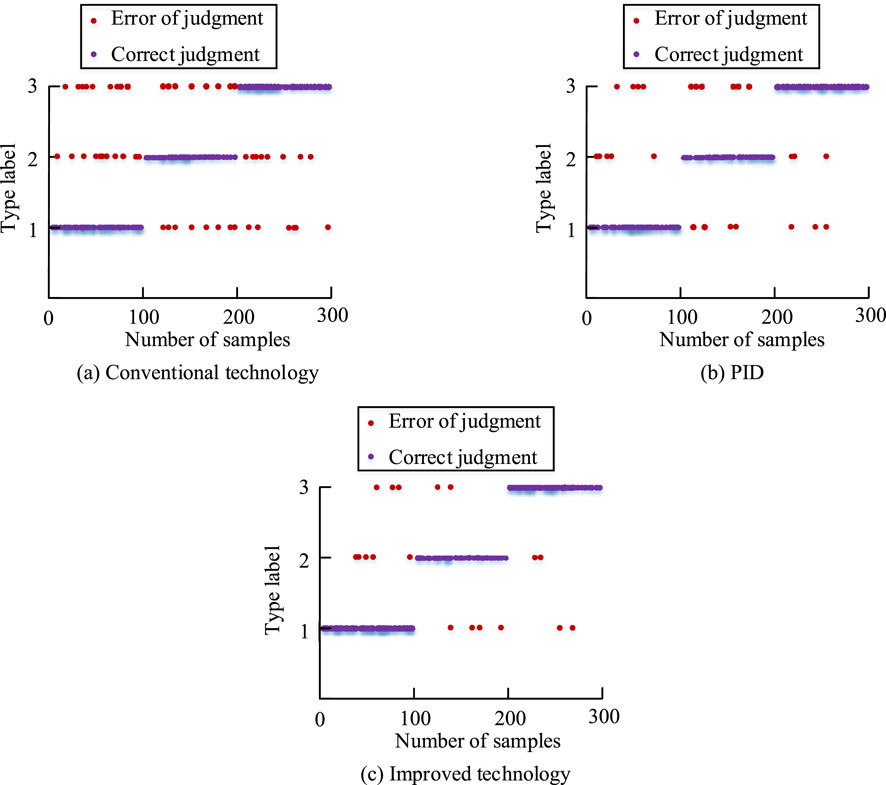
Figure 10. Test results of different object avoidance technologies. (A) Conventional technology. (B) PID. (C) Improved technology.
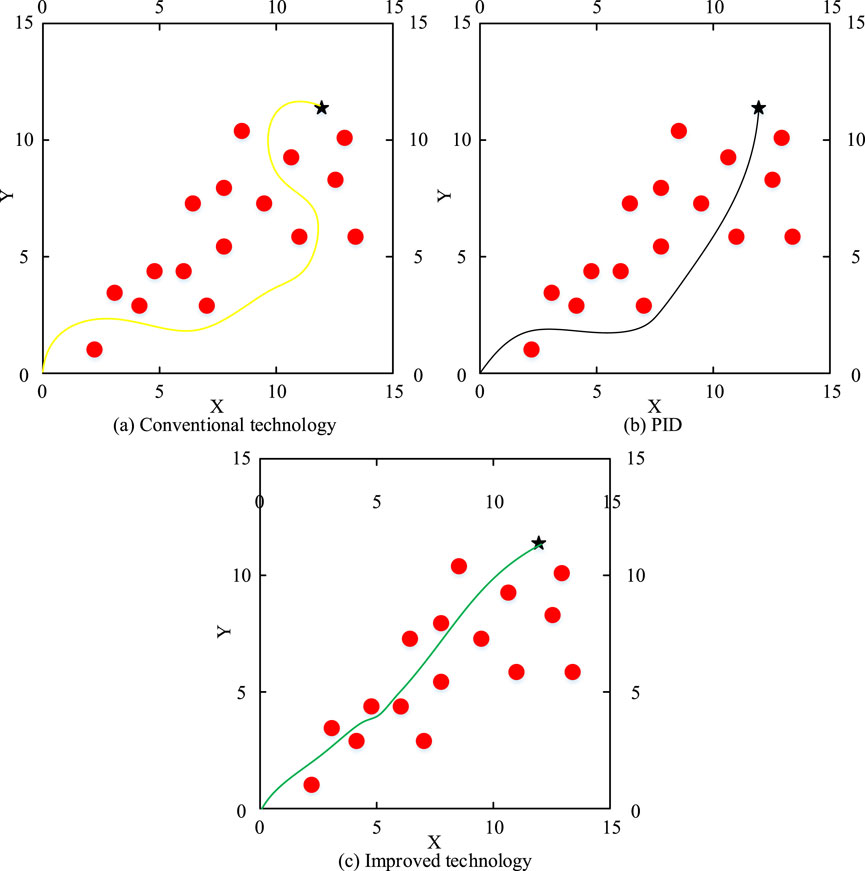
Figure 11. Route planning of the smart car. (A) Conventional technology. (B) PID. (C) Improved technology.
As shown in Figures 11A–C, the test vehicle using traditional obstacle avoidance technology chose the route with the least obstacles but the farthest path when avoiding obstacles during driving, indicating that the test vehicle was unable to accurately detect and recognize the specific distribution of surrounding obstacles. The test vehicle using PID obstacle avoidance technology, although the obstacle avoidance route was not the farthest, still improved its ability to recognize surrounding obstacles. The test vehicle using improved obstacle avoidance technology selected the optimal obstacle avoidance route, accurately detected and identified obstacles, and planned the optimal driving route. The above results indicate that the practical application effect of improved obstacle avoidance technology is better than that of control groups. The key indicators of obstacle avoidance behavior during the driving process of the test vehicle are scored, with a total score of 100 points. Based on the weights of each indicator, a comprehensive evaluation is conducted, and the specific scoring results are as follows.
As shown in Table 1, the final score for traditional technology was 72 points, the final score for PID obstacle avoidance technology was 83 points, and the final score for improved obstacle avoidance technology was 94 points. In the sub indicators of “Obstacle avoidance process time”, “obstacle avoidance preparation time”, and “Obstacle avoidance success rate”, the scores of improved obstacle avoidance technology were 94, 97, 99, 95, 94, 91, 92, 91, 96, respectively, which were higher than those of comparison obstacle avoidance technologies. In summary, intelligent vehicles based on improved obstacle avoidance technology have the strongest obstacle avoidance ability.

Table 1. Evaluation indicators of objective avoidance behaviors.
5 Conclusion
Due to the increasing attention paid to the safety issues of intelligent vehicles, the obstacle avoidance ability of intelligent vehicles is particularly important. However, traditional obstacle avoidance technologies have insufficient processing ability for fuzzy information, resulting in intelligent vehicles being unable to accurately detect and recognize obstacles with fuzzy information. To address this issue, the fuzzy control principle was used to improve traditional obstacle avoidance techniques in intelligent vehicles. After comparing the performance of the improved obstacle avoidance technology, the results showed that the accuracy of the improved obstacle avoidance technology was 96.11%, the area under the PR curve was 8.1, and the area under the ROC was 8.7, which exceeded traditional obstacle avoidance technology and PID obstacle avoidance technology. When there was no interference signal, the running time and overshoot of this technology were 2.4s and 7%, which were better than comparison technologies. After adding interference signals, the running time and overshoot of this technology were 3.1s and 9%, which were still better than comparison technologies and had strong anti-interference ability. Empirical analysis was conducted on the practical application effect of the improved obstacle avoidance technology. The results showed that the intelligent vehicle with this technology had a 94% accuracy in judging obstacles, which was better than the comparative technology. The planned driving route was the best in the comparative experiment. Finally, the obstacle avoidance behavior of three groups of intelligent vehicles was rated, and the obstacle avoidance technology proposed in the study scored the highest at 94 points. In summary, the intelligent vehicle obstacle avoidance technology based on fuzzy control theory proposed in the study can improve the intelligent vehicle obstacle recognition accuracy, thereby improving the success rate of intelligent vehicle obstacle avoidance and ensuring safe driving. However, this technology is too complex for the processing of simple information. How to simplify the calculation process will be the future research direction.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
QW: Conceptualization, Data curation, Formal Analysis, Methodology, Writing–original draft. Shaolin He: Investigation, Project administration, Resources, Software, Writing–review and editing. ZZ: Software, Supervision, Validation, Visualization, Writing–review and editing.
Funding
The author(s) declare that no financial support was received for the research, authorship, and/or publication of this article.
Conflict of interest
Author SH was employed by State Grid Changsha Power Supply Company.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abbasi, S., and Jalali, A. (2020). Some new performance definitions of second order fuzzy systems. Soft Comput. 24 (6), 4109–4120. doi:10.1007/s00500-019-04177-y
Ahanda, J., Achille, M., Essimbi, B., Biya-Motto, F., and Essimbi Zobo, B. (2020). Adaptive fuzzy finite time command filtered backstepping control of flexible joint robots. Robotica 39 (6), 1081–1100. doi:10.1017/s0263574720000910
Chen, G., Hong, L., Dong, J., Liu, P., Conradt, J., and Knoll, A. (2020). EDDD: event based drowsiness driving detection through facial motion analysis with neuromorphic vision sensor. IEEE Sensors J. 20 (11), 6170–6181. doi:10.1109/jsen.2020.2973049
Chen, H., and Zhang, X. (2022). Path planning for intelligent vehicle collision avoidance of dynamic pedestrian using att-LSTM, MSFM, and MPC at unsignalized crosswalk. IEEE Trans. Industrial Electron. 69 (4), 4285–4295. doi:10.1109/tie.2021.3073301
Colombaroni, C., Fusco, G., and Isaenko, N. (2020). Coherence analysis of road safe speed and driving behaviour from floating car data. IET Intell. Transp. Syst. 14 (9), 985–992. doi:10.1049/iet-its.2019.0700
Ejegwa, P., and Agbetayo, J. (2023). Similarity-distance decision-making technique and its applications via intuitionistic fuzzy pairs. J. Comput. Cognitive Eng. 2 (1), 68–74. doi:10.47852/bonviewjcce512522514
Ferraz, P., Oliveira, B., Ferreira, F., and Martins, C. (2020). Three stage RGBD architecture for vehicle and pedestrian detection using convolutional neural networks and stereovision. IET Intell. Transp. Syst. 14 (10), 1319–1327. doi:10.1049/iet-its.2019.0367
Huang, S., Teo, R. S. H., and Tan, K. K. (2019). Collision avoidance of multi unmanned aerial vehicles: a review. Annu. Rev. Control 48, 147–164. doi:10.1016/j.arcontrol.2019.10.001
Li, W., Yang, X., Wang, S., Xiao, J., and Hou, Q. (2020). Research and prospect of ceramics for automotive disc brakes. Ceram. Int. 47 (8), 10442–10463. doi:10.1016/j.ceramint.2020.12.206
Li, Y., Qu, F., and Tong, S. (2020). Observer-based fuzzy adaptive finite-time containment control of nonlinear multiagent systems with input delay. IEEE Trans. Cybern. 51 (1), 126–137. doi:10.1109/tcyb.2020.2970454
Liu, Z., Chen, J., Lan, F., and Xia, H. (2020). Methodology of hierarchical collision avoidance for high-speed self-driving vehicle based on motion-decoupled extraction of scenarios. IET Intell. Transp. Syst. 14 (3), 172–181. doi:10.1049/iet-its.2019.0334
Pan, Z., Li, K., Deng, H., and Wei, Y. (2021). Obstacle recognation for intelligent vehicle based on radar and vision fusion. Int. J. Robotics Automation 36 (3), 178–187. doi:10.2316/j.2021.206-0478
Qin, X., Zhang, P., Yu, C., Zhang, Q., and Sun, Y. (2021). Health monitoring sensor placement optimization based on initial sensor layout using improved partheno genetic algorithm. Adv. Struct. Eng. 24 (2), 252–265. doi:10.1177/1369433220947198
Saeed, M., Ahmad, M., and Rahman, A. (2022). Refined pythagorean fuzzy sets: properties, set-theoretic operations and axiomatic results. J. Comput. Cognitive Eng. 2 (1), 10–16. doi:10.47852/bonviewjcce2023512225
Song, R., and Li, B. (2022). Surrounding vehicles' lane change maneuver prediction and detection for intelligent vehicles: a comprehensive review. IEEE Trans. Intelligent Transp. Syst. 23 (7), 6046–6062. doi:10.1109/tits.2021.3076164
Suto, H., Kataoka, F., Kikuchi, N., Knuteson, R., Butz, A., Haun, M., et al. (2021). Thermal and near-infrared sensor for carbon observation Fourier transform spectrometer-2 (TANSO-FTS-2) on the Greenhouse gases Observing SATellite-2 (GOSAT-2) during its first year in orbit. Atmos. Meas. Tech. 14 (3), 2013–2039. doi:10.5194/amt-14-2013-2021
Thomas, E., McCrudden, C., Wharton, Z., and Behera, A. (2020). Perception of autonomous vehicles by the modern society: a survey. IET Intell. Transp. Syst. 14 (10), 1228–1239. doi:10.1049/iet-its.2019.0703
Tong, S., Min, X., and Li, Y. (2020). Observer based adaptive fuzzy tracking control for strict feedback non linear systems with unknown control gain functions. IEEE Trans. Cybern. 50 (9), 3903–3913. doi:10.1109/tcyb.2020.2977175
Wahid, N., Zamzuri, H., Amer, N., Dwijotomo, A., Saruchi, S., and Mazlan, S. (2020). Vehicle collision avoidance motion planning strategy using artificial potential field with adaptive multi-speed scheduler. IET Intell. Transp. Syst. 14 (10), 1200–1209. doi:10.1049/iet-its.2020.0048
Xie, G., Yang, K., Xu, C., Li, R., and Hu, S. (2022). Digital twinning based adaptive development environment for automotive cyber-physical systems. IEEE Trans. Industrial Inf. 18 (2), 1387–1396. doi:10.1109/tii.2021.3064364
Xu, B., Ni, X., Wang, Y., Wang, Y., and Liu, Y. (2020). Optimization of threshing quality control strategy based on Type-2 Fuzzy logic controller. Elektron. Ir. Elektrotechnika 26 (2), 15–23. doi:10.5755/j01.eie.26.2.25924
Keywords: fuzzy control theory, intelligent vehicles, automobile obstacle avoidance technology, sensors, obstacle avoidance behavior
Citation: Wang Q, He S and Zhao Z (2024) Intelligent vehicle obstacle avoidance strategy application supported by fuzzy control theory. Front. Mech. Eng. 10:1434067. doi: 10.3389/fmech.2024.1434067
Received: 17 May 2024; Accepted: 25 November 2024;
Published: 11 December 2024.
Edited by:
Gabriel Fedorko, Technical University of Košice, SlovakiaReviewed by:
Sunan Huang, National University of Singapore, SingaporeBo Leng, Tongji University, China
Copyright © 2024 Wang, He and Zhao. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Qianqian Wang, d3FxODUwODA4QDE2My5jb20=