 Biao Tang1
Biao Tang1 Dongdong Zhu
Dongdong Zhu
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
MINI REVIEW article
Front. Energy Res., 30 August 2022
Sec. Smart Grids
Volume 10 - 2022 | https://doi.org/10.3389/fenrg.2022.993758
This article is part of the Research TopicState Perception and Fault Diagnosis of New Power SystemsView all 17 articles
As the core part of the power grid, the substation must carry out regular patrol inspection to ensure the normal operation of the equipment. In recent years, with the continuous increase of load, the area of the substation has gradually expanded, which makes its operating environment more complex, the intensity of patrol inspection has increased, and the manual patrol inspection method cannot meet the needs of patrol inspection. Therefore, it is necessary to introduce high-tech equipment and use patrol inspection robots to conduct regular patrol inspection, which inevitably leads to a large number of different working environments with matching standards and regulations for different equipment. In order to facilitate the staff to implement the delivery of robots matching the standards for the projects in the corresponding actual environment, the concept of knowledge atlas has been introduced and revolutionarily applied to the multi-source fusion of substation patrol robots, which not only more clearly analyzes the relationship between multi-source data, which can also make the operation and application in practical projects more convenient. This paper creatively uses the method of knowledge graph to summarize and analyze the multi-source fusion data of the field patrol robot in different working environments of a substation in Southwest China, and provides the research direction of this field and a one-stop manual for potential researchers and engineers in the future.
With the continuous improvement of the requirements for robot intelligence (RI), the integration of robot multi-sensor has attracted more and more attention in the research of robot system (Alhassan et al., 2020). Through the integration and fusion of the information obtained by a variety of sensors, the robot can quickly obtain more comprehensive (Guan et al., 2020), reliable and accurate information about the external environment, which makes the robot have higher adaptability and flexibility when working in an unknown or dynamic environment, thus improving its intelligence level (Zhao et al., 2017). However, the system function, system performance, hardware requirements, system architecture, system interface, the setting of inspection points and the formulation of the scheme of the intelligent inspection robot in the substation are all matched with their corresponding implementation objects (Zhang et al., 2022a). Therefore, a one-stop manual that is visual and convenient for operators to view is particularly important. In particular, Figure 1 Clearly shows the framework of the substation online intelligent inspection system and the cooperation between different devices, Figure 2 Describes the intelligent inspection robots of substations in four different countries and different scenarios. Figure 3 gives a clear overview of the relations and applications between objectives.
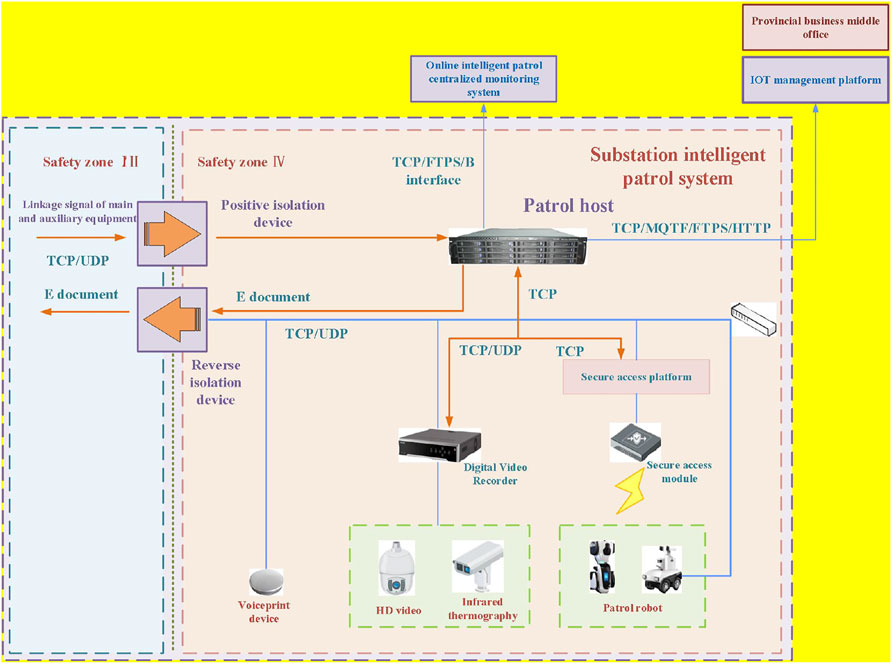
FIGURE 1. Framework diagram of substation online intelligent inspection system.
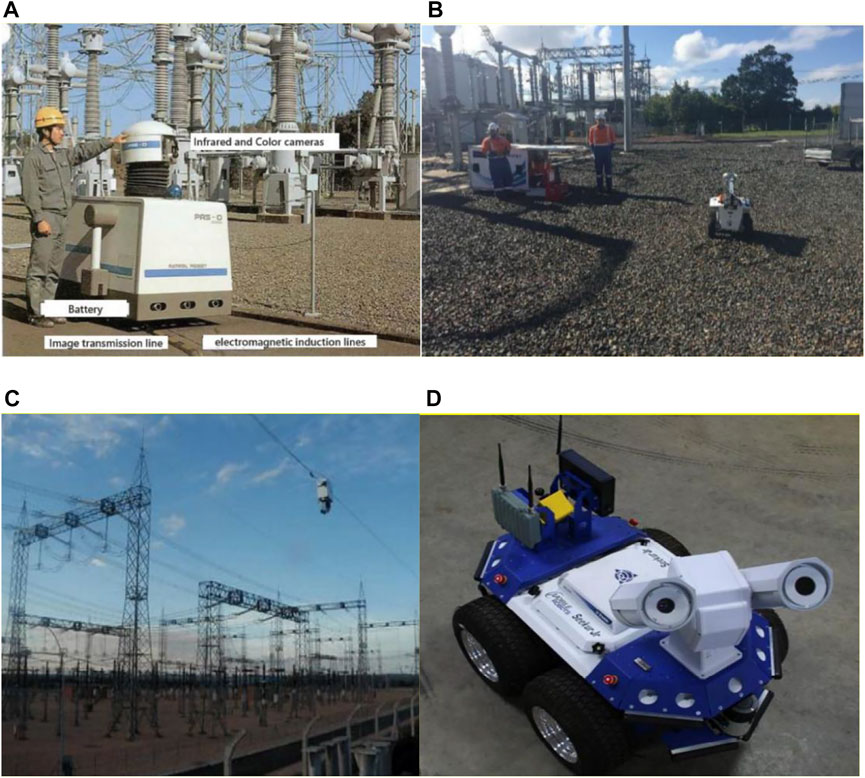
FIGURE 2. Substation inspection robot in different scenes. (A) Substation inspection robot, (B) New Zealand Power Inspection Robot, (C) Brazilian power inspection robot and (D) American power inspection robot.
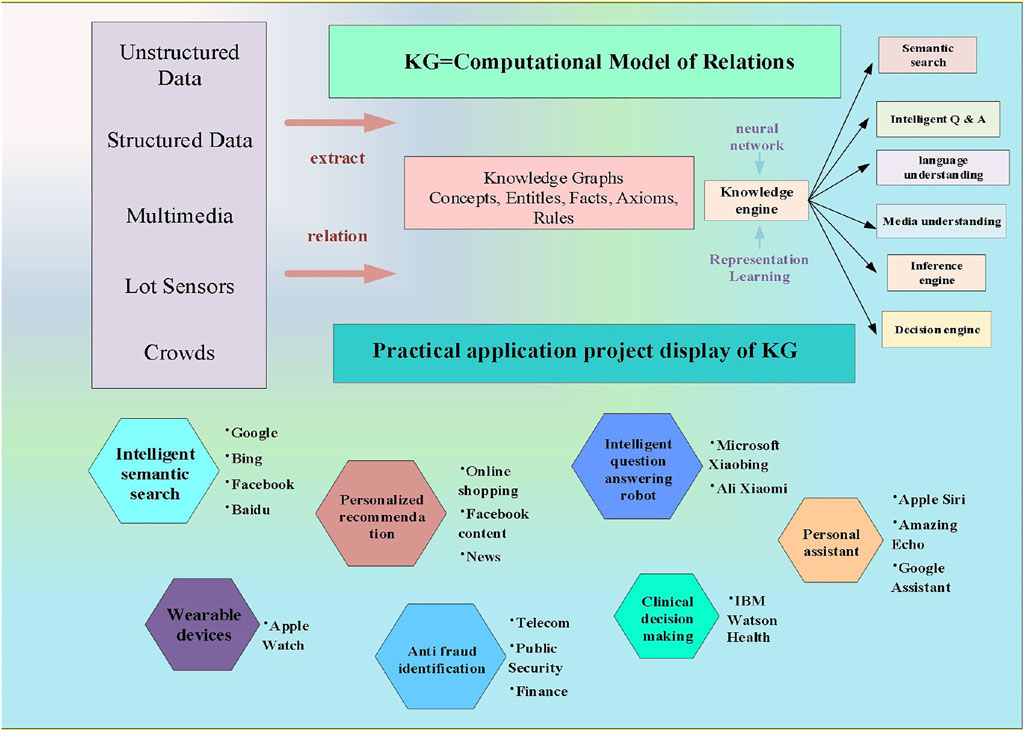
FIGURE 3. Overview of the connection and application between things in KG.
Knowledge graph (KG) is a field where many kinds of technologies intersect, KG is a concept in the field of artificial intelligence (AI), which evolved from knowledge base (KB) and knowledge representation (KR). KG was first proposed by Google in 2012, which is mainly composed of five categories: knowledge storage (KS), knowledge update (KU), KG construction (KGC), KR learning (KRL), and knowledge reasoning (KRE). KGC includes knowledge extraction (KE), knowledge fusion (KF), and knowledge processing (KP). KG is called knowledge domain visualization or knowledge domain mapping map in the library and information circles (Yusen et al., 2018), which is a series of different graphics that show the process of knowledge development and structural relationship (Chen. et al., 2020). KG uses visualization technology to describe knowledge resources and their carriers, mining, analyzing, constructing, drawing and displaying knowledge and the relationship between them (Yu et al., 2021a).
KG combines the theoretical methods of Applied Mathematics, graphics, information visualization technology (Hu et al., 2021; Wu, 2021), information science and other disciplines with Bibliometrics citation analysis, co-occurrence analysis and other methods, and uses the visualized atlas to vividly display the core structure, development history, frontier fields and the overall knowledge structure of the discipline, so as to achieve the modern theory of multidisciplinary integration (Jin. et al., 2021), which can provide practical and valuable references for discipline research.
Academically, the research of knowledge atlas mainly focuses on the automatic construction and application of KG. The construction process of existing large-scale knowledge maps depends on structural or semi-structural data (Wang et al., 2021), which requires a lot of manual intervention, and there is a sparse problem (Niu et al., 2021). The automatic construction of KG from unstructured text data leads to knowledge acquisition, which includes map completion, entity discovery, relationship extraction and other steps. Entity discovery can be divided into entity recognition, entity classification, entity connection and so on. In terms of application (Zuo et al., 2021), KG is combined with many tasks to enhance knowledge. KG itself is a symbol system. The representation learning of knowledge map integrates knowledge into the existing neural model framework by learning from knowledge map to embed entities and relationships (Siddharth. et al., 2021). Some studies have used KG to pre train language models to enrich the common sense of language models and improve their performance in downstream tasks (Zhu et al., 2022). There is also research on the use of knowledge maps in recommendation systems, question and answer systems, and so on.
In engineering, KG is being applied in medical, e-commerce, finance and other fields, while the cost of building a complete and comprehensive knowledge map is still high (Huang et al., 2022). There are great differences in the construction of KG in different industries, so the construction scheme needs to be designed in combination with the characteristics of the industry and data, and still requires a lot of manual intervention (Shen et al., 2022).
Moreover, the rest of the article is arranged as follows: Section 2 aims to review the concepts and methods of multi-source data fusion; Section 3 summarizes and reviews the application field and Application Research of KG; In Section 4, KG is used to visually analyze the five connection criteria of intelligent inspection robot in substation; Finally, section 5 summarizes the full text, and puts forward three revolutionary innovations and three constructive prospects.
Multi-source data fusion refers to the information processing process of comprehensively analysing and processing the data collected by multiple sensors through computer technology to achieve the required decision-making tasks (Kejriwal et al., 2019). As the basic unit of power grid, power equipment is the basis of safe, reliable and stable operation of power grid. Power equipment data mainly consists of basic data of power equipment, condition monitoring data, operation and maintenance data, public safety data and historical data (Yu et al., 2021b). Among them, the condition monitoring data of power equipment is taking centre stage in analysing and predicting the development of equipment status.
Currently, multi-source data fusion is facing intractable problems. In terms of data defects, there will be uncertainty, low accuracy, abnormity and falseness in flawed data, which brings great challenges to data processing. Secondly, due to the diversity of current data, there will be difficulty in data federation, data calibration and data matching. Moreover, the inconsistency in sensor frequency, sensor dimension, data form and other factors will result in the complexity of multi-source data fusion, thus increase the difficulty of determining entities and relationships and easily cause the problem of data inconsistency (Liu et al., 2021). Hence, use different data fusion models and data fusion algorithms can effectively integrate vast amounts of data from different sources.
The initial models of data fusion are divided into pixel-level fusion, feature-level fusion and the decision-making level fusion (Wu et al., 2020). The research of fusion method is one of the important research contents of data fusion, as follows:
1) Pixel-level fusion
Before data pre-processing and feature extraction, multi-source data are fused, and data pre-processing and feature extraction are carried out at the same time. Main pixel-level fusion methods are weighted mean method, mathematical statistics method, decision-based methods, Kalman filtering method, etc.
2) Feature-level fusion
The data from various sources are pre-processed and feature extracted, then the extracted feature parameters are fused. Main feature-level fusion methods are Kalman filtering method, fuzzy reasoning, neural network method and so on.
3) Decision-making level fusion
Make decision analysis on multi-source data respectively, and then fuse various analysis results to get the final decision result. Main decision-making level fusion methods are Bayesian method, Dempster-Shafer (D-S) method, etc (Wang et al., 2020).
Data level fusion preserves the characteristics of the original data as much as possible, which can improve the accuracy of intelligent decision-making results (Yu et al., 2021c). Then, models of data fusion are extended to four levels, including target extraction, situation analysis, threat estimating and process refining. The four-level fusion model dynamically monitors the fusion process, optimizes resource and sensor management, and feeds back the fusion result information in real time, so as to make the fusion process adaptive, so as to achieve the best fusion effect (Li et al., 2020).
This section introduces several typical algorithms of multi-source data fusion, as follows:
1) Weighted mean method
Weighted mean method uses the past several observations of the same variable arranged in time order and takes the time order number as the weight to calculate the weighted arithmetic mean of the observations, which is the simplest real-time data fusion method. The point of this method is that the average obtained has included long-term trend changes (Liu et al., 2022a). The weighted average can reflect the relative importance and is a more accurate score measurement. Its main process is as follows:
Use n sensors to measure a certain state quantity, and
Where
2) Kalman filtering method
Compared with other fusion algorithms, Kalman filter algorithm has stronger real-time performance, and can process a large amount of data in time to avoid resource consumption caused by data storage. Kalman filter algorithm is mainly used for the fusion of redundant sensor data in dynamic environment. This method is based on the statistical characteristics of measurement model and recursively determines the optimal estimation of fusion data in the statistical sense. This characteristic makes Kalman filter algorithm very suitable for systems that do not have the ability to transmit and store a large amount of data (Liu et al., 2001).
3) Fuzzy reasoning method
The basic idea of fuzzy set theory is to activate the absolute membership relationship in ordinary sets. Reasoning is the process of deriving corresponding conclusions from existing objective facts under specific rules. Fuzzy reasoning technology, which combines fuzzy theory and reasoning process, has been widely used to deal with fuzzy problems (Li et al., 2022).
4) Bayesian method
Bayesian method is usually used in static data fusion. Its information satisfies the probability distribution and can process uncertain data with noise (Sun and Yu, 2016). The main process is as follows:
Taking possible decisions of the system
where i = 1, 2, 3, … , m,
5) Neural network method
Neural network is an information processing technology that simulates human brain. It determines the classification standard according to the sample information provided by each sensor. This determination method is mainly reflected in the weight distribution of the network. At the same time, it also uses the specific learning algorithm of the neural network for offline or online learning to obtain knowledge, obtain the uncertainty reasoning mechanism, and then fuse and relearn according to this mechanism. This method has high robustness and high fault tolerance, which brings significant advantage in multi-source data fusion (Liu et al., 2022b).
6) Dempster-Shafer method
D-S method can fuse different data through imprecise reasoning, and get more objective and practical results. Because the data sources are independent of each other and the detection errors of different data sources are different, the basic trust allocation functions obtained are different. In order to improve the accuracy of target detection, D-S synthesis rules have the ability to fuse the information provided by independent multi-source data (Liu et al., 2022c).
The research of KG originates from the concept of Semantic Web proposed by Tim Berners Lee at the 2000 XML conference. Initially, its main function is to add semantic information to web pages and provide semantic information services such as information agent, search agent, information filtering, etc. In 2005, American company Meta web extracts people or things (entities) and their relationships in the real world based on public data sets, and stores them in a graphical structure in a computer (Çanak, 2020). KG has been developed 10 years since it was firstly proposed by Google in 2012. KG usually represents data in graphic form to represents the relationships between two or more things. It is an important basis for realizing cognitive intelligence in AI era, which has already received extensive attention from academia and engineering. Figure 4 shows the concept of the knowledge graph and its updating process.
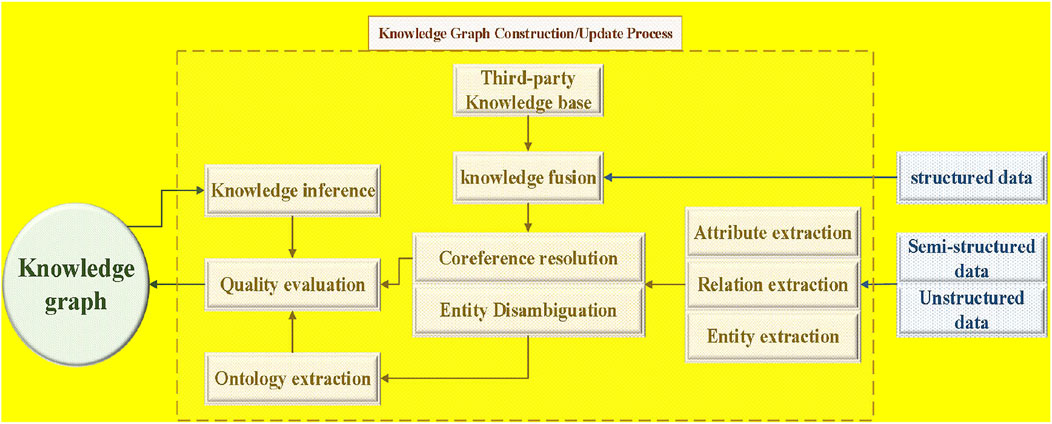
FIGURE 4. The technical framework of KG.
Specifically, KG is a multi-disciplinary integration of Applied Mathematics, information visualization, information science, graphics, and other modern studies. The main measure of KG to carry on research consists knowledge measurement, data mining, graph drawing and information processing and so on, which is a powerful tool for discipline research, and reveals the dynamic development characteristics of knowledge field. Up to now, the practical application of KG has been gradually expanded and has gained some progress.
With the increasing expansion of the scale of KG, the problem of data management is becoming more and more important. The research content of KG mainly involves knowledge representation, knowledge extraction, knowledge fusion, and knowledge reasoning. Traditional research fields of KG mainly focus on traditional data storage, knowledge acquisition, ontology fusion, logical reasoning, and the application of KG. Up to now, KG has two data models, including resource description framework (RDF) graph and property graph. Literature (Zhang et al., 2022b) proposed a knowledge storage and query scheme based on Tinker Pop graph computing framework, which offered a self-contained knowledge storage and query system and supported the query of mixed storage types of data. Literature (Wang and Li, 2021) proposed a visual data query system named UniKG, which used relational model to store data. This technique usually saves more storage time and space than other techniques. Traditional knowledge acquisition techniques have relatively simple mechanism, which are easy to implement, but are usually constricted by complex constraints and low scalability, which is an area needs to be improved (Hall and Llinas, 1997). Knowledge fusion is a main technology of KG technique. Traditional knowledge fusion technologies usually exhibit poor accuracy and response capability. Work (Xu et al., 2016) proposed an unsupervised knowledge fusion approach to handle the multivariate data application named self-organizing map (SOM), which is of simple structure and high practicability. Work (Xing et al., 2022) proposed a novel knowledge graph alignment (KGA) model, by combining knowledge graph deep representation learning, this approach realizes high accuracy and has large cover range. Knowledge reasoning aims to gain implicit knowledge and expand knowledge database, which play a crucial role in KG (Xu et al., 2016). Literature (Zhang et al., 2020) proposed a knowledge reasoning method which used deep reinforcement learning to achieve accurate positioning of the target solution, which has high flexibility and high pertinence. In conclusion, the relevant theory of KG has certain research significance and has high application value in current engineering practice. Power industry has also carried out researches and applications of KG related technologies in the professional fields of dispatching, marketing, transportation inspection and so on.
As the core part of the power grid, the substation should carry out regular inspection to ensure that the equipment is in normal operation conditions. In addition, due to the continuous development of China in recent years, the area of the substation has gradually expanded, making the operating environment more complex and the intensity of the inspection work has increased. The manual inspection method can no longer meet the needs of the inspection work. Therefore, the inspection robot needs to carry out regular inspection to avoid excessive manual investment.
With the gradual development of intelligent and unattended substations in China, the application of inspection robots in inspection work is the future development trend. Therefore, the detection robot must simplify the configuration, improve the navigation accuracy, and improve the flexibility and intelligence. The research work of patrol robot can improve the practicability of recognition algorithm, improve the efficiency and quality of pattern recognition, and study the recognition technology on the basis of existing patterns.
Through the analysis of the five-way inspection, video inspection and robot inspection comparison card of a substation in Southwest China, it can be clearly concluded that the level of inspection robot can not reach the level of manual inspection. Therefore, it is necessary to introduce high-tech equipment and use detection robots for regular detection. This part analyzes the relationship between multi-source data more clearly, which also enables the detection robot to quickly obtain more comprehensive, reliable and accurate information about the external environment in practical engineering. At the same time, the inspection robot must improve flexibility and intelligence, simplify configuration, and improve navigation accuracy. The research work of patrol robot can improve the practicability of recognition algorithm, improve the efficiency and quality of pattern recognition based on the existing patterns, and carry out the research of recognition technology at the same time. In particular, the summary of routine inspection, video inspection and robot inspection comparison card of substation inspection robot in Southwest China is shown in Figure 5.
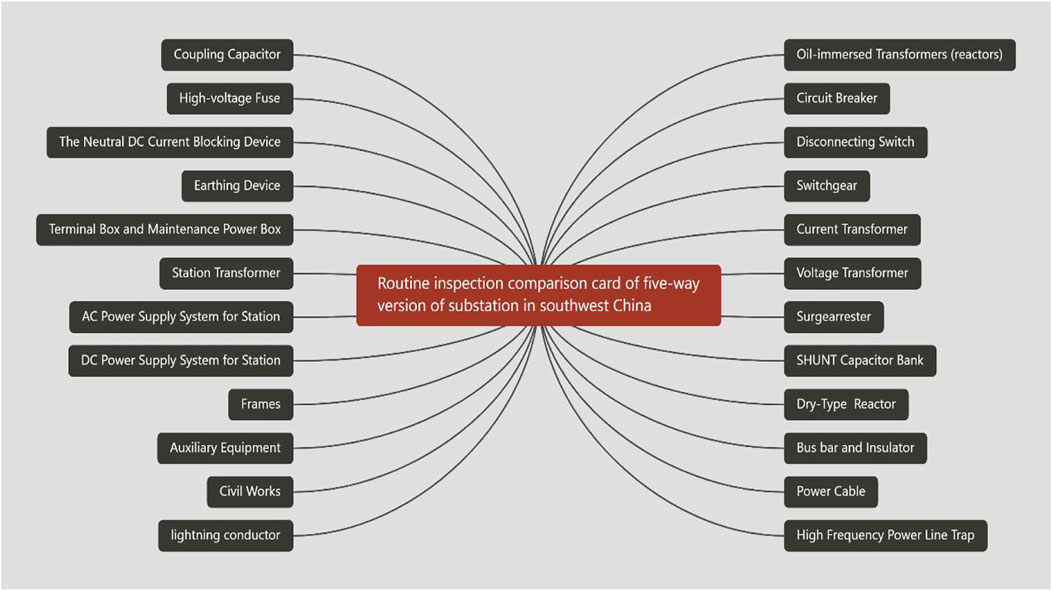
FIGURE 5. Comparison card of routine inspection, video inspection and robot inspection of a substation in Southwest China.
Table 1 clearly shows the five way standard of inspection robot in terms of oil immersed transformer. It can be seen from the table that the inspection contents of oil immersed transformer include body and bushing, tap changer, cooling system, non-electric protection device, oil conservator and other parts. Among them, the projects that can be realized by the robot are comprehensively compared with the manual routine inspection (five-way standard). From the results, it can be seen that the robot can realize most of the substation inspection projects, and individual inspection projects cannot be realized. For example, the robot cannot recognize whether there is abnormal sound on the end screen of the transformer bushing, whether the sound of the transformer is uniform, whether the fans, oil pumps and water pumps of each cooler in the cooling system operate normally, and whether the oil flow relay works normally. In the future research and development process, it can not only improve the existing structural design and activate the wheeled mobile platform according to the ground complexity of the equipment area in the substation environment, but also improve the self-protection ability of the inspection robot, optimize the obstacle recognition ability, increase the ability to bypass obstacles, and improve the execution efficiency and quality of inspection work. The R&D personnel can study the integrated navigation technology and combine various navigation technologies such as laser, inertia and vision, so as to realize the ability of autonomous path planning of robot patrol inspection and improve the adaptability of patrol inspection robot to the working environment of substation.
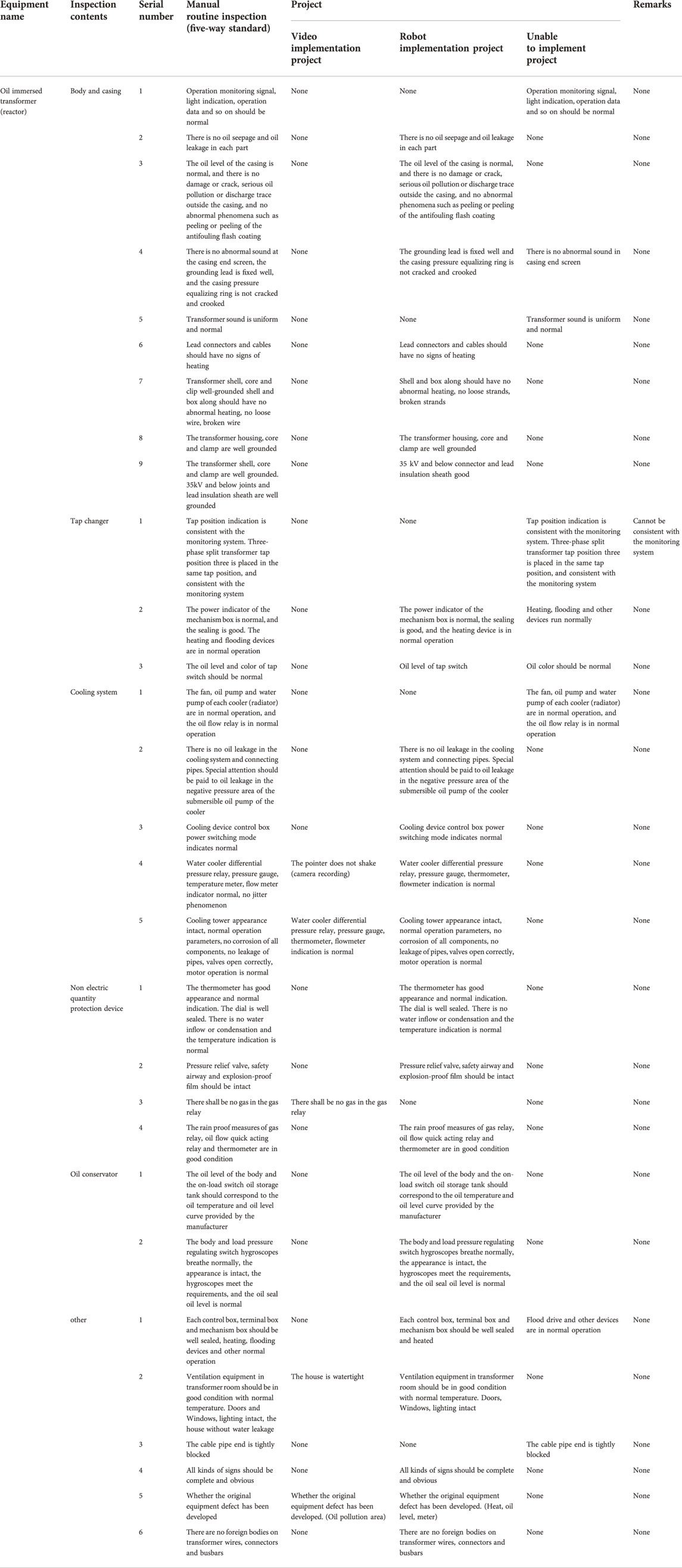
TABLE 1. Comparison card of routine inspection, video inspection and robot inspection of five-way version of oil immersed transformer in substation in Southwest China.
The development of society is accompanied by the increase of load, which inevitably leads to the continuous expansion of the area of the substation. The problem brought by this is the explosive growth of the manpower and workload invested in the maintenance of the substation, and the substation inspection robot based on artificial intelligence can well solve this kind of problem. This work has developed a one-stop manual for the implementation standard of the substation intelligent inspection robot, on this basis, researchers/engineers can get sufficient and comprehensive guidance for further research in this field. The main innovations are as follows:
1) This paper clearly summarizes and analyzes the five-way manual of an intelligent inspection robot in a substation in Southwest China;
2) KG method is innovatively used to summarize and visualize the five-way manual of substation intelligent inspection robot;
3) The concepts of multi-source fusion and kg are combined and used in the summary and analysis of the five-way manual of intelligent inspection robot in substation.
Lastly, three promising recommendations are proposed as follows:
1) In the future research and development process, we should improve the existing structural design, realize the flexible wheeled mobile platform, and improve the self-protection ability of the detection robot;
2) The obstacle recognition ability of the inspection robot should be optimized so that it can bypass the obstacles and improve the efficiency and quality of the inspection work;
3) R&D personnel can study integrated navigation technology, combined with laser, inertia, vision and other navigation technologies, to achieve robot detection and autonomous path planning capabilities, and improve the adaptability of the detection robot to the substation working environment.
BT: Conceptualization, Writing-Original Draft, Formal analysis; XH: Supervision, Writing-Review & Editing; YM: Visualization, Validation; DZ: Data Curation, Visualization; HY: Formal analysis, Software; LT: Investigation, Validation; ZL: Writing-Reviewing and Editing, Methodology; XQ: Writing-Reviewing and Editing, Supervision.
The authors gratefully acknowledge the support of Research and innovative application of key technologies of image processing and knowledge atlas for complex scenes in Smart Grid (202202AD080004), Research and innovative application of key technologies of image processing and knowledge atlas for complex scenes in Smart Grid (YNKJXM20220,019), Practical maintenance of substation inspection robot master station management platform of Yunnan Electric Power Research Institute in 2022–2023 (056200MS62210005), Yunnan technological innovation talent training object project (No. 202205AD160005).
BT, XH, YM, HY, LT and ZL were employed by Electric Power Research Institute, China Southern Power Grid, Yunnan Power Grid Co., Ltd. DZ was employed by Zhejiang Guozi Robotics Co., Ltd. XQ was employed by Yunnan Electric Power Technology Co., Ltd.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
AI, artificial intelligence; D-S, Dempster-Shafer; KB, knowledge base; KE, knowledge extraction; KF, knowledge fusion; KG, Knowledge graph; KGA, knowledge graph alignment; KGC, KG construction; KP, knowledge processing; KR, Knowledge representation; KRE, knowledge reasoning; KRL, KR learning; KS, knowledge storage; KU, knowledge update; RDF, resource description framework; RI, robot intelligence; SOM, self-organizing map.
Alhassan, A., Zhang, X., and Shen, H. (2020). Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power & Energy Syst. 118, 105862. doi:10.1016/j.ijepes.2020.105862
Çanak, I. (2020). A tauberian theorem for a weighted mean method of summability in ordered spaces. Natl. Acad. Sci. Lett. 43 (6), 553–555. doi:10.1007/s40009-020-00915-1
Chen., X., Jia, S., and Xiang, Y. (2020). A review: Knowledge reasoning over knowledge graph. Expert Syst. Appl. 141 (112948), 112948–113021. doi:10.1016/j.eswa.2019.112948
Guan, H., Sun, X., Su., Y., and Wang, H. (2020). UAV-lidar aids automatic intelligent powerline inspection. Int. J. Electr. Power & Energy Syst. 130, 106987. doi:10.1016/j.ijepes.2021.106987
Hall, D. L., and Llinas, J. (1997). An introduction to multisensor data fusion. Proc. IEEE 85 (1), 6–23. doi:10.1109/5.554205
Hu, J., Rosalba, L., Dobson, R. J. B., Bean, D. M., and Iacoangeli, A. (2021). DGLinker: Flexible knowledge-graph prediction of disease–gene associations. Nucleic Acids Res. 49, W153–W161. doi:10.1093/nar/gkab449
Huang, W., Qi, T., and Guan, Y. (2022). Knowledge graph based waveform recommendation: A New communication waveform design paradigm. arXiv e-prints2022. doi:10.48550/arXiv.2202.01926
Jin., W., Yu, H., and Tao, X. (2021). Improving embedded knowledge graph multi-hop question answering by introducing relational chain reasoning. doi:10.48550/arXiv.2110.12679
Kejriwal, M., Sequeda, J. F., and Lopez, V. (2019). Knowledge graphs: Construction, management and querying. Semant. Web 10 (6), 961–962. doi:10.3233/sw-190370
Li, W., Qi, G., and Ji, Q. (2020). Hybrid reasoning in knowledge graphs: Combing symbolic reasoning and statistical reasoning. Semant. Web 11 (1), 53–62. doi:10.3233/SW-190375
Li, X., Wang, J., Tan, J., Ji, S., and Jia, H. (2022). A graph neural network-based stock forecasting method utilizing multi-source heterogeneous data fusion. Multimed. Tools Appl., 1–23. doi:10.1007/s11042-022-13231-1
Liu, B., WangLiu, X., UniKG, P., Li, S., Fu, Q., and Chai, Y. (2021). UniKG: A unified interoperable knowledge graph database system. Int. Conf. Data Eng. (ICDE), 2681–2684. doi:10.1109/ICDE51399.2021.00303
Liu, C., Kong, L., and Shen, P. (2001). Multisource remote sensing data fusion using fuzzy self-organization mapping network and modified Dempster-Shafer evidential reasoning method of classification. Data Min. Appl. 4556, 71–79.
Liu, H., Zhou, S., Chen, C., Gao, T., Xu, J., and Shu, M. (2022). Dynamic knowledge graph reasoning based on deep reinforcement learning. Knowledge-Based Syst. 241, 108235. doi:10.1016/j.knosys.2022.108235
Liu, R., Greve, K., Cui, P., and Jiang, N. (2022). Collaborative positioning method via GPS/INS and RS/MO multi-source data fusion in multi-target navigation. Surv. Rev. 54 (383), 95–105. doi:10.1080/00396265.2021.1883962
Liu, X., Zhang, Y., Wang, J., Huang, H., and Yin, H. (2022). Multi-source and multivariate ozone prediction based on fuzzy cognitive maps and evidential reasoning theory. Appl. Soft Comput. 119, 108600. doi:10.1016/j.asoc.2022.108600
Niu, G., Li, Y., and Tang, C. (2021). Path-enhanced multi-relational question answering with knowledge graph embeddings. doi:10.48550/arXiv.2110.15622
Shen, L., He, R., and Huang, S. (2022). Entity alignment with adaptive margin learning knowledge graph embedding. Data & Knowl. Eng. 139, 101987. doi:10.1016/j.datak.2022.101987
Siddharth., L., Blessing, L., and Wood, L. (2021). Engineering knowledge graph from patent database. J. Comput. Inf. Sci. Eng. 22, 1–36. doi:10.1115/1.4052293
Sun, T., and Yu, M. (2016). Research on multi-source data fusion method based on Bayesian estimation, 2016 9th international Symposium on computational Intelligence and design (ISCID), Hangzhou, China, 321–324.
Wang, S., and Li, W. (2021). GeoAI in terrain analysis: Enabling multi-source deep learning and data fusion for natural feature detection. Comput. Environ. Urban Syst. 90, 101715. doi:10.1016/j.compenvurbsys.2021.101715
Wang, X., Zhao, L., Zhang, S., Wang, Y., Qin, D., and Sun, W. (2020). Self-organizing-map-based knowledge fusion method for heterogeneous ontologies in power grid networks. Int. Conf. Mech. Control Comput. Eng. (ICMCCE), 321–325. doi:10.1109/ICMCCE51767.2020.00078
Wang, Y., Zhu, L., Ma, J., Hu, G., Liu, J., and Qiao, Y. (2021). Knowledge graph-based spatial-aware user community preference query algorithm for LBSNs. Big Data Res. 23, 100169. doi:10.1016/j.bdr.2020.100169
Wu, J., Nie, Y., Jiang, L., Zhou, A., and Xie, N. (2020). Research of knowledge graph technology and its applications in agricultural information consultation field. Int. Perform. Comput. Commun. Conf. (IPCCC), 1–4. doi:10.1109/IPCCC50635.2020.9391515
Wu, Y. (2021). Summary of research on contract risk management of EPC general contracting project—based on VOSviewer knowledge graph analysis. Springer Books. doi:10.1007/978-981-16-3587-8_69
Xing, J., Wu, W., Cheng, Q., and Liu, R. (2022). Traffic state estimation of urban road networks by multi-source data fusion: Review and new insights. Phys. A Stat. Mech. its Appl. 595, 127079. doi:10.1016/j.physa.2022.127079
Xu, H. Y., Wang, C., Ru, L. J., et al. (2016). Study of multi-source data fusion in topic discovery. Adv. Multimedia Ubiquitous Eng. 393, 729–735.
Yu, B., Zhang, Y., and Sun, H. (2021). Research on knowledge storage and query technology based on general graph data processing framework. Int. Conf. Commun. Softw. Netw. (ICCSN) 2021, 305–309. doi:10.1109/ICCSN52437.2021.9463640
Yu, C., Wang, F., Liu, Y. H., and An, L. (2021). Research on knowledge graph alignment model based on deep learning. Expert Syst. Appl. 186, 115768. doi:10.1016/j.eswa.2021.115768
Yu, J., Zhang, Y., Wu, Y., and Mao, L. (2021). Research on the practical application of visual knowledge graph in technology service model and intelligent supervision. J. Phys. Conf. Ser. 1982 (1), 012040. doi:10.1088/1742-6596/1982/1/012040
Yusen, X., Liu., Y., and Zheng, S. (2018). A systematic review of the growth and a forecasting on the development of gerontechnology-based on an knowledge graph analysis of international literature. Sci. Res. Aging.
Zhang, K., Gao, T., and Shi, H. (2022). Bearing fault diagnosis method based on multi-source heterogeneous information fusion. Meas. Sci. Technol. 33 (7), 075901. doi:10.1088/1361-6501/ac5deb
Zhang, P., Li, T., Wang, G., Luo, C., Chen, H., Zhang, J., et al. (2020). Multi-source information fusion based on rough set theory: A review. Inf. Fusion 68, 85–117. doi:10.1016/j.inffus.2020.11.004
Zhang, Z., Xu, F., Qin, Z., and Xie, Y. (2022). Resource allocation in UAV assisted air ground intelligent inspection system. Cogn. Robot. 2, 1–12. doi:10.1016/j.cogr.2021.12.002
Zhao, X., Liu., Z., Liu., Y., Zhang, B., Sui, J., and Jiang, K. (2017). Structure design and application of combination track intelligent inspection robot used in substation indoor. Procedia Comput. Sci. 107, 190–195. doi:10.1016/j.procs.2017.03.077,
Zhu, X., Z, Li., and Wang., X. (2022). Multi-modal knowledge graph construction and application. A Surv. doi:10.48550/arXiv.2202.05786
Keywords: multi-source fusion, artificial intelligence, substation, inspection robot, knowledge graph
Citation: Tang B, Huang X, Ma Y, Yu H, Tang L, Lin Z, Zhu D and Qin X (2022) Multi-source fusion of substation intelligent inspection robot based on knowledge graph: A overview and roadmap. Front. Energy Res. 10:993758. doi: 10.3389/fenrg.2022.993758
Received: 14 July 2022; Accepted: 29 July 2022;
Published: 30 August 2022.
Edited by:
Xiaoshun Zhang, Northeastern University, ChinaReviewed by:
Xiaohan Jiang, Kunming University of Science and Technology, ChinaCopyright © 2022 Tang, Huang, Ma, Yu, Tang, Lin, Zhu and Qin. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Dongdong Zhu, MzEzNjkwMjUwNUBxcS5jb20=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.