
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Educ., 13 January 2023
Sec. Digital Education
Volume 7 - 2022 | https://doi.org/10.3389/feduc.2022.1046461
This article is part of the Research TopicRecent Innovations on Applied Technology in EducationView all 5 articles
 Janika Leoste1,2*
Janika Leoste1,2* Mati Heidmets2
Mati Heidmets2 Sirje Virkus2
Sirje Virkus2 Aleksei Talisainen1Martin Rebane1Tiina Kasuk1
Aleksei Talisainen1Martin Rebane1Tiina Kasuk1 Kalle Tammemäe1Katrin Kangur1Kaido Kikkas1
Kalle Tammemäe1Katrin Kangur1Kaido Kikkas1 Kristel Marmor1
Kristel Marmor1Introduction: Telepresence robots (TPRs) are the subject of an emerging field of application and research that has recently received attention from various disciplines. Most of the relevant research has been done in computer science, while the interest from psychology and education has been relatively modest. Proximity plays an important role in personal interactions. Although human spatial behavior has been widely studied in social psychology, little attention has been paid to the spatial behavior of humans and TPRs.
Methods: The purpose of this paper is to present the results of a pilot study that investigated a certain aspect of spatial behavior – physical proximity or interpersonal distance – based on four social zones of interpersonal distance that characterize Western culture: intimate, personal, social, and public. The study conducted an experiment involving participants both in person and via TPRs, using the Double 3 TPRs in various simulated situations.
Results: According to the findings, when interacting with a TPR, most participants maintained a communication distance of 60 to 160 cm, which is the borderline between personal and social distance, quite similar to normal human-to-human social communication. Status and previous relationship did not play any role in the choice of communication distance, but there were significant gender differences. On average, male participants chose a shorter distance to interact with TPRs compared to female participants. Persons with previous computer gaming experience chose a significantly shorter communication distance compared to persons with no such experience. A little more than half of the participants found the method of communication through TPRs to be pleasant.
Discussion: TPR mediated persons might be perceived as “real” when communicating with physically present persons, with similar norms applied as in human-to-human social interactions. Especially in the context of classroom communication, people keep communication distances comparable to far personal or close social distances. These findings suggest that implementation of TPRs in education does not put additional requirements for physical space in classroom.
The interest toward using telepresence robots (TPRs) has increased notably since the early 1990s. For example, in the last few years the market has developed significantly due to an influx of new vendors, with its value of USD 165 million (Mordor Intelligence, 2021) in 2020 expected to grow to 1.4 billion in 2030 (Verified Market Research, 2022). The global TPR market consists of North America, Europe, Asia Pacific, and the rest of the world, with the Asia Pacific having the fastest-growing market in the coming years (Verified Market Research, 2022). The major vendors include Amy Robotics, Anybots, Double Robotics, Inbot Technology, Intouch Technologies, Mantaro Networks, Ohmnilabs, Qihan Technology, Suitable Technologies, Superdroid Robots, and VGO Communications (Emergen Research, 2021).
According to El-Gayar et al. (2005), telepresence “is defined as the feeling of being fully present at a remote location from one’s own physical location. Telepresence creates a virtual or simulated environment of the real experience.” A telepresence robot (TPR) is a mobile communication tool or device that consists of a mobile base, display, microphone, camera, speakers and various sensors, and can be remotely controlled. Telepresence offers new solutions for remote collaboration and promotes the efficiency of several activities (Goza et al., 2004; Zhang, 2021). Compared to traditional video-conferencing tools, TPRs can cultivate stronger feelings of social presence, a greater sense of togetherness and a feeling of being together in one room (Nowak and Biocca, 2003; Nakanishi et al., 2008; Newhart et al., 2016; Schouten et al., 2022), enabling richer communication that is more similar to in-person communication.
TPRs are used in a variety of fields, for example in:
• Healthcare, e.g., telehealth, care for elderly people, and various technical tasks (O’Neill et al., 2001; Tsai et al., 2007; Cesta et al., 2016; Koceska and Koceski, 2022);
• Business, e.g., managing teams at multiple locations, attending meetings (Lee and Takayama, 2011; Tsui et al., 2011; Beno, 2018; Muratbekova-Touron and Leon, 2021), museums (Claudio et al., 2017; Chang, 2019), industry (James et al., 2019; Hernandez et al., 2021);
• Education, e.g., addressing challenges that are related to health of either students or teachers, distance, disasters, etc. (Gallon et al., 2017, 2019).
TPRs can enable communication (e.g., supervisors consulting their subordinates or teachers guiding groups of students) that would otherwise be too costly (e.g., travel-related financial or time costs) or impossible (e.g., the COVID-19 era restrictions). Compared to mobile robots, TPRs allow using the knowledge and experience of a skilled expert swiftly over great distances, safely in dangerous situations, etc. For example, in telehealth, TPRs make it possible for the highly skilled experts to tend the patients over great distances – e.g., the first ever telerobotic surgery was a laparoscopic cholecystectomy performed on a patient in France by a surgeon from United States on September 7, 2001 (Marescaux et al., 2002). More widely, TPRs allow patients in remote areas to access doctors or facilitate managing patients with highly dangerous infectious diseases in hospitals. In particular, TPRs are seen as promising in catering to elderly people, allowing cutting costs when visiting patients at their homes or allowing family members to safely visit their elderly relatives in nursing homes (Moyle et al., 2019). In education, TPRs are mainly seen as enablers, allowing students to participate in in-person lessons when their health, disabilities or travel costs would force them to suspend or discontinue their learning (Leoste et al., 2022). In particular, according to a literature review of Virkus et al. (2022), TPRs can promote language learning by providing authentic communication practice, facilitate the access to education in specific situations where physical access to education is either temporarily or permanently impeded (e.g., dangerous environments), reduce remote students’ loneliness, provide them with a greater sense of social presence, engagement, autonomy, interest, confidence, focused attention, situation awareness, motivation, mobility, and flow experience that involves energized focus, a strong sense of pleasure and the loss of time-consciousness in classroom settings compared to videoconferencing. TPRs can also provide supervisory opportunities such as teacher-to-teacher mentoring and coaching throughout the classroom (e.g., Montessori early childhood education classrooms). TPRs can also provide access to cultural assets, such as in museums, libraries, archives and galleries which can be effectively integrated into the learning and teaching process. There are currently many examples of how TPRs are already helping students with special needs (e.g., autism, attention deficit hyperactivity disorder and diabetes). TPRs can also support internationalization by enabling educational institutions to access experts from around the world to interact and teach students, enriching their educational and cultural experience (Draper et al., 1999; Faiola et al., 2013; Lister, 2020; Burbank et al., 2021; Lei et al., 2022; Van Erp et al., 2022).
The overall reason for developing telepresence robotics is to provide a Telepresence Robot Mediated Person (TMP) with an alternative body when using the human body is either not possible or not cost-effective. In this sense, the robotic body is often viewed as a double, a proxy for the TMP’s own body, allowing the person to have bodily ownership and bodily awareness over the robotic body (Björnfot, 2022). A TPR allows the TMP to become spatially present at a remote location while being aware of surroundings and remaining relatively independent by making it possible to move around the room and interact with different people (Lee and Takayama, 2011; Page et al., 2020; Björnfot, 2022). These abilities make it possible for the TMP to have a social presence in the room and to imitate normal social practices of human beings (Takayama and Go, 2012). These social practices, however, depend on the abilities of the bodies of the participants of social interactions, as a social practice is “a routinized way in which bodies are moved, objects are handled, subjects are treated, things are described and the world is understood” (Reckwitz, 2002). A TPR provides its user with movement, vision, hearing, speech, and the opportunity to show the user’s face, allowing the user to express their identity. However, human communication relies on other social cues, too. Body movements, spatial behavior, posture, eye contact and gestures can be used to convey additional meaning during a discussion, making it easier for the participants to mutually understand their intent, attitude, to take on different roles, and establish intimacy and trust (Urry, 2004; Strengers, 2015). Conveying these social cues via the limited abilities of current TPRs can be impossible or at least challenging.
The research on the value of TPRs fostering communication is still scarce. Most studies that have investigated the use of TPRs, are conceptual, usually providing proof-of-concepts or small-size case studies. Previous research is mainly based on qualitative research of people’s perceptions and experiences through analyzing interviews, written reflections and video recordings. Very few studies have so far compared multiple experimental conditions to reveal the effect of TPRs (Chen et al., 2022). The relevant empirical research about the underlying process that may explain group cooperation and communication via TPRs (Schouten et al., 2022) needs also supplementing as most of the existing research is done in computer science, focusing on the technological aspects of TPRs. For example, our analysis (Virkus et al., 2022) of the articles in the Web of Science database suggests that almost half (49.7%) of the publications about TPRs come from the subject area of computer science, followed by robotics and engineering. Only a marginal part of the papers studies the ramifications of using TPRs in, e.g., educational research (6%), psychology (6%), health care (5%), or other fields.
The analysis of articles from the field of psychology indicates that TPRs can provide their users with greater social presence as well as engagement and flow experience when working in groups with Physically Present Persons (PPPs), compared to using regular video conferencing tools. However, compared to physically present attendance, the social presence, and engagement, when using TPRs, still seems to be lower. In addition, the use of TPRs involves some problematic aspects, such as robomorphism, where a TMP is perceived by PPPs as being a part of the robot instead of a human being. The findings from the perspective of psychology indicate that the research in this area is still rudimentary and without a clear focus. However, it seems that the topic of social presence needs to be studied more rigorously as, based on existing papers, it is considered as one of the key advantages of using TPRs, when compared to traditional display-and-speakers based video conferencing means (Schouten et al., 2022; Virkus et al., 2022).
In the context of telepresence technology, social presence happens when “a person’s perception fails to accurately acknowledge the role of technology in her/his perception that the person or people with whom s/he is engaged in two-way communication is/are in the same physical location and environment when in fact they are in a different physical location” (Lombard and Snyder-Duch, 2001). In other words, a TPR allows the TMP and the PPP to feel as being together with another person in the same room, “including primitive responses to social cues/−−−/and automatically-generated models of intentionality of others” (Biocca et al., 2003). Social presence and engagement, including social cues, is important for more efficient communication that is perceived by participants as enjoyable and satisfying (Horvath and Lombard, 2010). In this, socio-spatial interactivity – a collection of spatial behavior rules – holds a key role (McCreery et al., 2015). However, in addition to social presence and engagement, Van Erp et al. (2022) highlight the importance of bidirectional social cues, including eye contact, facial expression, posture, gestures, and social touch. Considering the current limits of TPRs (e.g., inability to shake shoulders, move hands and the general lack of complex body language), one of the most important measurable characteristics of TPR-enabled social presence is physical proximity (distance) between communication parties.
Research in human communication has extensively studied human proximity behavior and how this might affect human communication (Hall, 1966; Patterson, 1976; Kaplan, 1977). According to Hall (1966), spatial behavior can be considered as one of the “hidden dimensions” of human communication. It is a set of candid norms making use of various concepts such as distance, orientation, physical (haptic) and visual (eye) contact, personalization, etc. It is a set of silently followed cultural norms whose mere existence is often realized only once they are broken. However, as many studies indicate, violating these norms leads to tension, conflicts and disrupted communication. In this paper, we focus on a specific feature of spatial behavior: physical proximity or distance. Hall (1966) outlines four main communication distance types, the use of which depends on situation and on the relationship between the communicating parties:
1. Intimate distance – less than 40–50 cm, bordering on direct physical contact. This distance allows for intensive communication where the message is complemented by visual (small details of the other person), haptic (touch, feeling the breath) and olfactory (smelling) senses. In general, this distance is used when the communication takes place between people who are very closely related (child and parent, spouses).
2. Personal distance – about 50 to 100 cm. While still allowing visual observation of small details, haptic and olfactory cues diminish or disappear. This distance is usually reserved for people who are closely related to the person – entry of a stranger is typically perceived as an intrusion.
3. Social distance – about 1 to 4 m. This distance hides small personal details and it is used for communication that is more formal (e.g., this distance is used for customer’s seats in offices). Hall also notes that with distance, communication becomes optional (as ignoring the other person is not considered improper).
4. Public distance – more than 4 m. This distance is used in public situations (e.g., public speech, lecture, or performance) or when communicating with superiors. Intimate visual cues are replaced by, e.g., increased speech volume and gestures that are more notable.
Several subsequent studies have supported Hall’s (1966) categories of communication distance. However, only a small number of studies have investigated proximity behavior in human-robot interaction (Mead and Mataric, 2012 Walters et al., 2005; van Oosterhout and Visser, 2008; Takayama and Pantofaru, 2009; Mumm and Mutlu, 2011; Sardar et al., 2012; Shen et al., 2018; Saunderson and Nejat, 2019). These studies have found that the same proximity zones that exist in human-human interaction can be applied to human-robot interaction. For example, Walters et al. (2005) found that 60% of participants conformed to Hall’s proximity zones, while 40% took up positions too close to the robot, suggesting that they were not treating the robot as a social entity. The results of the study by Takayama and Pantofaru (2009) showed that users’ gender may influence perceptions of proximity in human-robot interaction. They also found that participants who had prior experience with robots and those who owned pets were more comfortable with smaller distance than others. Mumm and Mutlu (2011) found that participants who disliked the robot would maintain a greater distance from the robot and male participants distanced themselves significantly further than female participants from the robot. However, in their study, Van Oosterhout and Visser (2008) placed a robot in a public place and found that men approached the robot closer than women. Joosse (2017) also showed significant gender differences in distancing behavior in his doctoral study. Previous research has identified several factors that can influence people’s personal spatial preferences with a robot: gender (van Oosterhout and Visser, 2008; Takayama and Pantofaru, 2009; Mumm and Mutlu, 2011), age (van Oosterhout and Visser, 2008), attitudes toward robots (Walters et al., 2005; Takayama and Pantofaru, 2009; Mumm and Mutlu, 2011), experience with robots (Takayama and Pantofaru, 2009), robot appearance (van Oosterhout and Visser, 2008; Walters et al., 2009), cultural background (Eresha et al., 2013), participants’ personality, interaction context, and situation (Walters et al., 2009). However, Leichtmann et al. (2021) conclude that most of the current results in this field are quite mixed and inconsistent. Due to multiple theoretical and methodological limitations, it is not possible to draw meaningful conclusions for most factors including gender, age, personality, or robot-related aspects.
In the context of TPRs, we are interested in understanding if the communication between a PPP and a TMP follows the same distance rules as established in normal interaction between PPPs.
In August 2022, we conducted a pilot study to confirm a hypothesis and to find answers to three research questions. Our hypothesis was the following: A PPP keeps social distance when interacting with a TMP. The hypothesis relies on the classification by Hall (1966) that refers to people keeping social distance when having formal interaction.
Our research questions were the following:
Does the distance between a PPP and a TMP depend on the status of communicating parties (teacher vs. student), on their relationship (strangers vs. familiars), and on the gender of the party that chooses the distance? This question is based on previous research about factors influencing communication distance (Aiello, 1987).
1. Does the distance between a PPP and a TMP depend on the previous computer gaming experience of the party that chooses the distance? This question is based on previous research about how gaming experience facilitates adoption of novel technologies (Hayes and Ohrnberger, 2013).
2. How do people evaluate the efficiency and pleasantness of communication with a TMP?
3. In addition, we desired to experiment with and evaluate the possibilities of measuring the communication distance in situations where a physical test person is interacting with a TMP.
The study involved conducting an experiment on using the Double 3 TPR (see Double Robotics, 2022) in various simulated situations, where some of the participants were present in person and others via the TPR (see Appendix 1 for detailed description of the experiment). The duration of the whole experiment was 1 h 15 min and it took place simultaneously in a large auditorium, four classrooms, and some other premises of Tallinn University of Technology (during the time of the experiment there were no other people moving around the area of the experiment).
The within-subjects design was selected due to relatively low number of participants without previous real use experience with telepresence robots. In addition, within-subjects design minimizes the risk of having differences caused by gender, age and personalities compared to the between-subjects design. For avoiding carryover effects the following measures were taken: (a) participants were not informed that their interpersonal distance was measured – this way they were unable to learn from their previously conducted experiments; and (b) the length of one communication situation was reduced to the approximately 1 min and the length of the whole experiment to 1 h 15 min, to prevent the fatigue effects of becoming tired or bored. The length of one communication situation was derived as a result of various pre-pilot studies, conducted by the authors. With this length of 1 min, both parties had sufficient time to exchange needed information, while allowing the observers to observe possible anomalies or unexpected behaviors during the communication.
The participants were given a script, informing them about their role and the approximate length of the communication situation. They had to be present in the roles of either a professor or a student. The situation was assigning a homework (professor to student) or explaining, why their homework was not done (student to professor). The language used by participants was a formal but friendly. The verbal cues could not influence the outcomes as the initial distance was taken before the communication started.
The experiment data were collected by using observation protocols, video recordings, and a digital survey at the end of the experiment. Due to the pilot nature of the study, the survey was validated for this study. The data were anonymized already at the initial stage, with the coding key secured by one of the organizers. The videos were kept password-protected in the computer of one of the organizers, and on an external HDD in a safe. The anonymized research data was also published in the open research data repository of Tallinn University of Technology.1
The experiment was conducted by nine employees of Tallinn University of Technology, all part of an IT didactics research group called “Creativity Matters.” The researchers worked in four pairs. One of the members was in charge of the experiment in that particular room, and filled in the observation protocol. The other member assisted the participant who was using the TPR. One additional staff member supervised the whole experiment.
The purposive sample consisted of 18 adult persons who were working either at (a) Tallinn University of Technology as university teachers or administration workers, or (b) East Tallinn Central Hospital. The participants were selected among the staff who are going to start using telepresence robots in their respective organizations in 2023. The persons who had previous experience with telepresence robots were removed from the sample. Participation in the study was voluntary and participants confirmed being adults. There were 8 male and 10 female participants. The average age of participants was 43, with the youngest one 30 and the oldest one 69 years old. Participants were issued badges with unique codes upon arrival. The badge had to be worn throughout the duration of the experiment. Similar badges were also issued to researchers in order to avoid the participants feeling as test subjects. The detailed description of the experiment is given in Appendix 1.
At the beginning of the experiment, the participants and researchers gathered in the large auditorium and the participants were divided into pairs. A half of the pairs were formed of participants who previously knew each other and the other half of the pairs consisted of participants who had not met before. Each of the four classrooms was manned by two pairs of participants and one pair of researchers. The initial forming of pairs took about 5 min. The pairs received an initial instruction for the experiment (Appendix 2). The participants were not told that the experiment involved measuring the distance between PPPs and TMPs. The initial instruction took about 5 min.
In each classroom, there were: (a) a video camera on a tripod; (b) an observation protocol on paper; (c) a Double 3 TPR; and (d) a laptop computer located outside the experiment room for controlling the robot. The location of the TPR was predetermined. The initial location of the PPP in the room was at least 3 m from the TPR (i.e., the participant had to move closer to the TPR in order to engage in the discussion with the TMP). The video camera was placed to record the Communication Situations (CSs) between the PPPs and TMPs. The in-classroom researcher was situated near the video camera.
The pair of researchers met with two pairs of participants at the door of their assigned classroom. One of the members of the first pair remained outside the classroom with one of the researchers who briefly repeated the key points of the activity, the duration of the activity (1 min) and introduced the user interface of the TPR on the laptop computer. The member took control of the user interface and was ready for the first experiment. In the first experiment, the TMP took the role of a teacher. The second researcher entered the classroom together with the second member of the first pair and also shortly repeated the key points of the activity, the duration of the activity (1 min) and explained that the participant had to move to the TPR to carry out the CS (Figure 1). After the first CS, the pair was asked to take a couple of minutes to prepare for the next CS where the TMP would take the role of a student. Next, the roles of the pair members were reversed and the CSs were repeated. The researchers thanked the first pair and repeated the experiment with the second pair, conducting the same activities with the same duration. The overall duration of this stage was about 20 min.
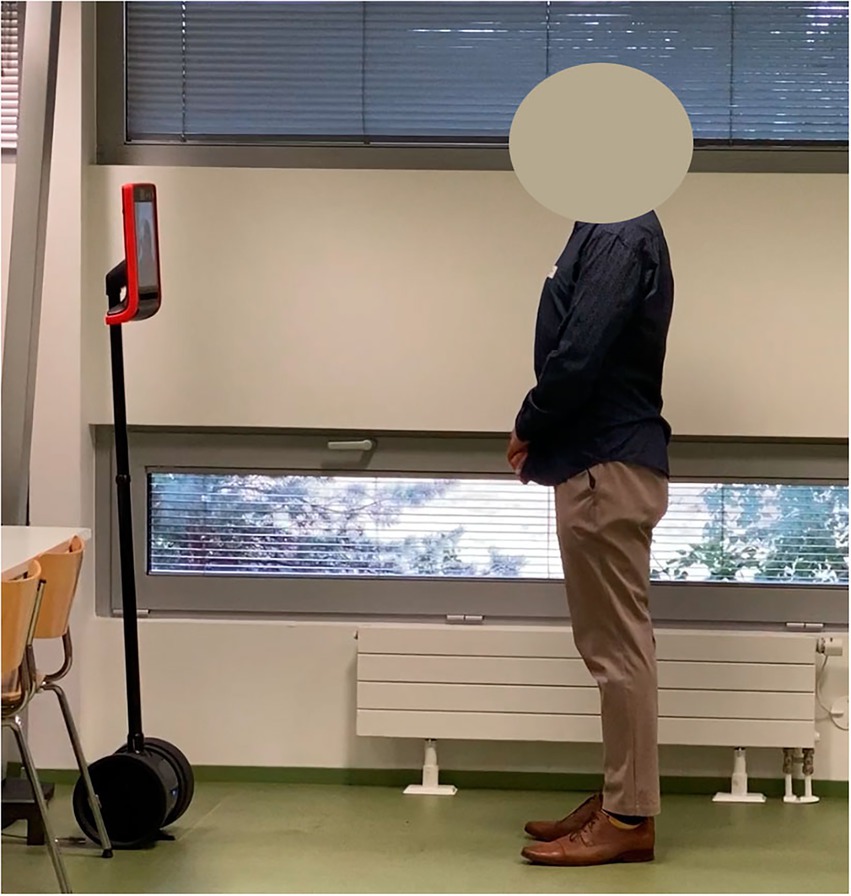
Figure 1. Example of a communication situation.
Next, participants and researchers gathered again in the large auditorium and new pairs were formed, according to the principles introduced during the initial instruction. The overall duration of this stage was about 5 min.
At Stage 4, the activities of Stage 2 were repeated with the new pairs. The overall duration of this stage was about 20 min.
All participants gathered in the large auditorium. The link to the digital survey was sent to their email addresses and they filled in their responses. The overall duration of this stage was about 10 min.
The following data collection methods were used:
• Video recording. During the experiment, video recordings were made of the CSs in order to determine the distance between the TPR and the PPP with the accuracy of 5 cm. In order to determine the distance, still frames were chosen, saved as pictures and from these pictures the distances were measured, using previously set up markers. The distance data were added to the digitized observation protocol.
• Observation protocol (Appendix 3). An observation protocol was assigned to each experiment activity. Researchers made their observation notes onto a predesigned paper protocol during the experiment. These paper protocols were digitized after the experiment and additional data from the video recordings were added to this digitized protocol.
• Post-experiment survey (Appendix 4). The survey was created by using the Office Forms software. The link to the survey was sent to participants to fill in their responses immediately after the experiments were finished.
The memory cards from the video cameras were collected and their contents saved to a dedicated cloud service folder. Similarly, the observation protocols were gathered, digitized and uploaded to the dedicated folder. All the video recordings made by researchers with their smartphones were collected and uploaded to the dedicated folder.
In order to confirm our hypothesis (a PPP keeps social distance when interacting with a TMP), the communication distance in situations where a PPP interacted with a TMP was measured, with the accuracy of 5 cm. The average communication distance was: M = 104 cm (SD = 33.1 cm; Min = 45 cm; Max = 180 cm).
About 80% of PPPs chose a distance between 60 and 160 cm – according to Hall (1966), this is a borderline area between the personal and social distance. About 15% of PPPs preferred a shorter distance of 45 to 60 cm (Figure 2).
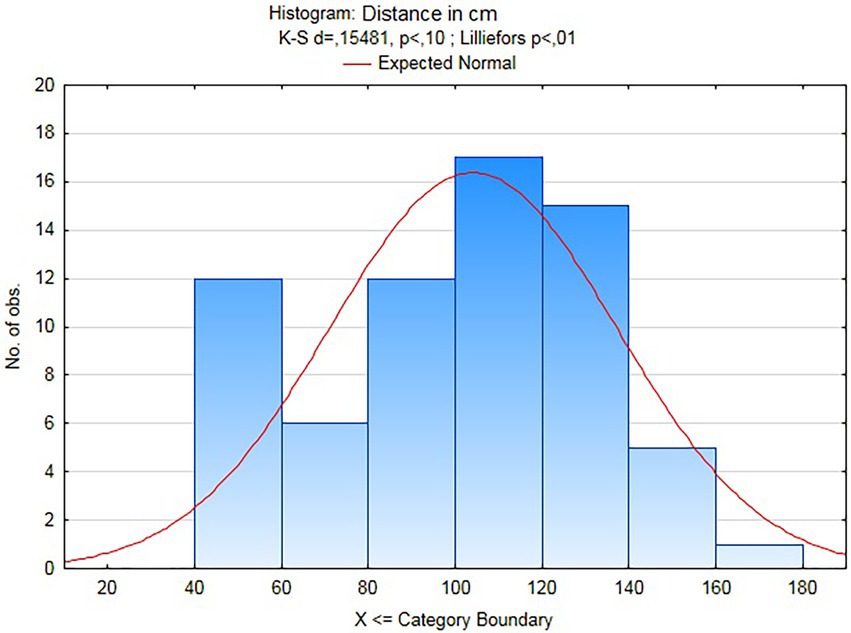
Figure 2. Communication distances chosen by PPPs.
Although distribution of the selected communication distances was not strictly normal (as shown at Figure 2) we still consider the communication distance as a parametric variable in this pilot study, which allows us to use the t-test as a tool to compare different groups of our respondents.
Our first research question was “Does the distance between a PPP and a TMP depend on the status of communicating parties, on their relationship, and on the gender of the party that chooses the distance?” To answer this question, we conducted a t-test, comparing the status groups (teacher vs. student), relationships (strangers vs. acquaintances), and the genders (female vs. male) of the interacting parties. The status and previous relationship played no role on the choice of communication distance (Tables 1, 2). However, there were remarkable gender-based differences. Male participants chose a shorter average distance (M = 87 cm) for communication with TMPs, compared to female participants (M = 115 cm); t (55) = 3.92; p < 0.01 (Table 3).

Table 1. Influence of status on communication distance.

Table 2. Influence of previous acquaintance on communication distance.

Table 3. Influence of gender on communication distance.
Our second research question was “Does the distance between a PPP and a TMP depend on the previous computer gaming experience of the party that chooses the distance?” The persons having previous experience with computer games chose a remarkably shorter communication distance (M = 97 cm) than the persons without such experience (M = 125 cm); t (54) = 3.24; p < 0.01 (Table 4).

Table 4. Influence of previous experience with computer games on communication distance.
Our third research question was “How do people evaluate the efficiency and pleasantness of communication with a TMP? Ninety percent of participants considered their experience in communicating with a TMP as efficient (answer choices “efficient” and “very efficient,” see Appendix 4), suggesting that all necessary information could be exchanged without obstructions. Fifty five percent of participants considered this communication method as pleasant (the answer choices “pleasant” and “very pleasant,” see Appendix 4). The statistical correlations between participants’ assessment of the efficiency and pleasantness of using telepresence robots is demonstrated in Table 5.
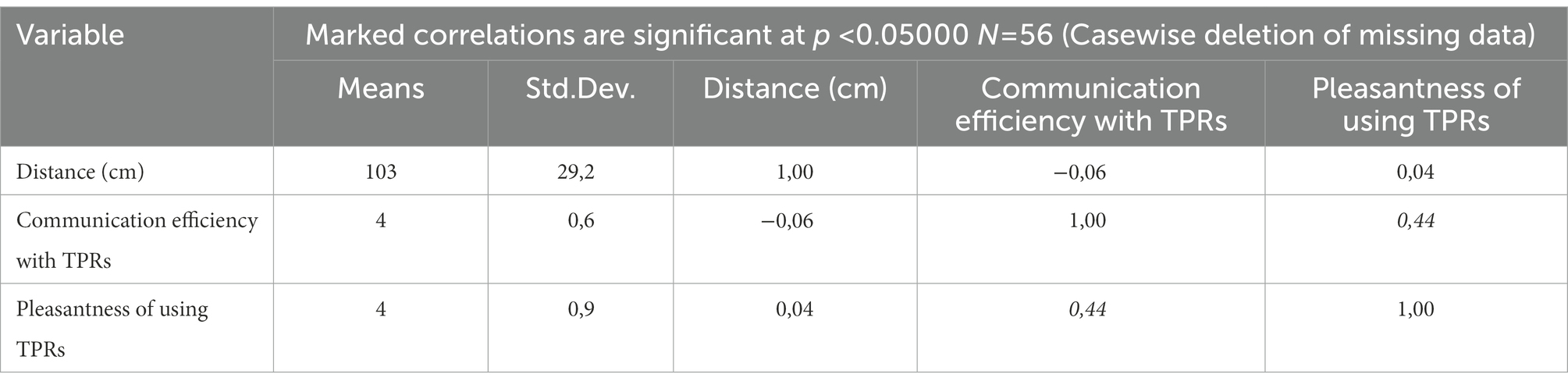
Table 5. Correlations between the communication efficiency and pleasantness when using telepresence robots.
In our study, most of the PPPs (about 80%) kept the communication distance of 60 to 160 cm when interacting with a TMP. According to the classification introduced by Hall (1966), this covers the farther end of personal distance and the nearer end of social distance. Our hypothesis was thus weakly confirmed – we had assumed that the participants would use social distance, but in reality, the chosen communication distance remained at the border area of personal and social distance. However, these findings also suggest that in communication with a TMP the distance is kept quite similarly to typical communication between PPPs. In other words, the TMP might be perceived as a “real” person, although mediated via technology. This finding is important, because it indicated that a TMP might be considered as a “normal” partner in human communication. In addition, the finding suggests that in communication with TPMs, the same cultural norms and customs work as those in typical human-to-human social communication. Assuming that these conclusions are correct (although they are currently based on the analysis of the choice of communication distance), then they need to be considered in spatial planning of communication between TPMs and PPPs – and also when developing TPRs.
We find it interesting that about one fifth of participants chose for a shorter distance of 40 to 60 cm when communicating with a TMP. In the follow-up analysis we established that these PPPs were all working in the hospital and thus, their choice of distance might have been influenced by their everyday communication in particular settings, with particular counterparts, with the hospital patients. This “anomaly” in preferred distances needs some further and more detailed investigation. Although the earlier papers on interpersonal distance in communication have highlighted the connection between the distance and the statuses of communicating parties or their relationships, this does not appear in communication between a PPP and a TMP. Although differently chosen communication distances could be partially explained by the differences in communication distances in different cultures (e.g., Triandis et al., 1965; Lomranz, 1976), other factors could be responsible as well. For example, a shorter distance was preferred by male participants (similarly to what was indicated by Takayama and Pantofaru, 2009 or by van Oosterhout and Visser, 2008) and by those with previous experience with computer games, suggesting that attitudes toward novel technologies could have influenced the spatial behavior of some of our participants (e.g., as indicated by Hayes and Ohrnberger, 2013 or Teo et al., 2015).
In the educational context, especially in the higher education context, our findings indicate that as people keep a communication distance that is comparable to far personal or close social distance then the robots could be used to substitute human body in classrooms where similar distances (e.g., Buai Chin et al., 2017) are usually kept.
One of the goals of the pilot study was to test a method for measuring communication distance using a video and to evaluate its usefulness. Based on our findings we suggest that our method is suitable for examining spatial behavior between TPMs and PPPs. However, our method relied on the human researchers to measure and calculate the distances. In order to reduce processing time, machine vision and machine learning methods should be employed in studies with larger sample sizes.
As a pilot study, this study has several limitations. To our knowledge, this study is the first one where the communication distance is measured in a situation where a PPP interacts with a TMP. As such, the study is characterized by a relatively small sample and by a novel method that still needs additional testing and development. In addition, the scripted communication situation was relatively simple, requiring only talking. There are more complex situations where it is necessary to share printed information, display information on the screen, and on those cases there is an increased need for the participants to move, potentially changing the measured results in distances kept during interaction. For future studies, we recommend involving a larger sample that also includes people with different attitudes and experience toward robotic communication aids. Besides distance, interpersonal orientation, the participants’ movement and touching need to be examined as well. If possible, studies should use more advanced TPRs that allow for a richer communication experience (e.g., body language) for all communication parties. Also, in our study almost a half of the participants did not consider TPRs as a pleasant and convenient way of communicating with other people. The reasons for this attitude need to be understood via additional studies. From our side, as of December 2022, we are in the process of launching a study where the above-mentioned shortcomings have been addressed.
The telepresence robots are currently not used at all in Estonian education. Also the worldwide research on telepresence robots in education is limited mostly to case studies. This study was a part of the study development project in Taltech University IT Department (including also health technologies), to research if the IT area teachers and students could benefit from this technology in the future. That limited the scope to participants to the community that is involved in implementing the study development project. Also, the study was a necessary precondition before bringing experimentation into real teaching and learning settings (from the fall 2022) to understand that general proximity rules could be applied when designing the teaching environment that involves telepresence robots. Despite its potential drawbacks, social presence is a critical experience within networked environments. While increased social presence may not always lead to positive results, multiple studies show that vivid perceptions of another person often lead to greater enjoyment and social influence in neutral and positive contexts (e.g., Fogg and Tseng, 1999 Hassanein and Head, 2007). Hence, a considerable amount of scholarly efforts has been made to identify factors that increase feelings of social presence, as we have found in the present paper concerning the communication distance.
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number (s) can be found at: https://doi.org/10.48726/qredh-8dh49.
Ethical review and approval was not required for the study on human participants in accordance with the local legislation and institutional requirements. Written informed consent from the participants was not required to participate in this study in accordance with the national legislation and the institutional requirements.
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
This study was funded by Tallinn University of Technology, IT College of the School of IT, Study Development Fund, project PYNT.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/feduc.2022.1046461/full#supplementary-material
Aiello, J. R. (1987). “Human spatial behavior” in Handbook of Environmental Psychology. eds. D. Stokols and I. Altman (New York: John Wiley & Sons), 359–504.
Beno, M. (2018). “Work flexibility, telepresence in the office for remote workers: a case study from Austria,” in International Conference on Multi-Disciplinary Trends in Artificial Intelligence. (Cham: Springer), 19–31.
Biocca, F., Harms, C., and Burgoon, J. K. (2003). Toward a more robust theory and measure of social presence: review and suggested criteria. Presence 12, 456–480. doi: 10.1162/105474603322761270
Björnfot, P. (2022). Being connected to the world through a robot. Doctoral Thesis. Umeå University, Faculty of Social Sciences, Department of Informatics. Available at: https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1657323&dswid=3087 (Accessed December 9, 2022).
Buai Chin, H., Cheong Yin Mei, C., and Taib, F. (2017). Instructional proxemics and its impact on classroom teaching and learning. Int. J. Mod. Lang. Appl. Ling. 1, 69–85. doi: 10.24191/ijmal.v1i1.7637
Burbank, M. D., Goldsmith, M. M., Bates, A. J., Spikner, J., and Park, K. (2021). Teacher observations using Telepresence robots: benefits and challenges for strengthening evaluations. J. Educ. Super. 4, 68–93. doi: 10.31045/jes.4.1.6
Cesta, A., Cortellessa, G., Orlandini, A., and Tiberio, L. (2016). Long-term evaluation of a telepresence robot for the elderly: methodology and ecological case study. Int. J. Soc. Robot. 8, 421–441. doi: 10.1007/s12369-016-0337-z
Chang, E. (2019). “Museums for everyone: experiments and probabilities in Telepresence robots,” in Exploring digital Technologies for art-Based Special Education (New York: Routledge), 65–76.
Chen, Y., Cao, L., Guo, L., and Cheng, J. (2022). Driving is believing: using telepresence robots to access makerspace for teachers in rural areas. Br. J. Educ. Technol. 53, 1956–1975. doi: 10.1111/bjet.13225
Claudio, G., Luca, G., and Luce, L. M. (2017). Interaction design for cultural heritage. A robotic cultural game for visiting the museum’s inaccessible areas. Des. J. 20, S3925–S3934. doi: 10.1080/14606925.2017.1352895
Double Robotics (2022). Double 3 – Overview. Available at: https://www.doublerobotics.com/double3.html (Accessed December 9, 2022).
Draper, J. V., Kaber, D. B., and Usher, J. M. (1999). Speculations on the value of telepresence. CyberPsychol. Behav. 2, 349–362. doi: 10.1089/cpb.1999.2.349
El-Gayar, O., Chen, K., and Tandekar, K. (2005). “Multimedia interactivity on the internet,” in Encyclopedia of Multimedia Technology and Networking. ed. M. Pagani (Hershey, Pennsylvania, USA: Idea Group Inc), 724–731.
Emergen Research (2021). Telepresence robot market by component (display, camera, speaker, control system & sensors, power source), by product type (mobile, stationary), by application (healthcare, education, homecare, enterprise), and by region, forecast to 2028. Available at: https://www.emergenresearch.com/industry-report/telepresence-robot-market (Accessed December 9, 2022).
Eresha, G., Häring, M., Endrass, B., André, E., and Obaid, M. (2013). Investigating the influence of culture on proxemic behaviors for humanoid robots. 2013 IEEE RO-MAN 430–435. doi: 10.1109/ROMAN.2013.6628517
Faiola, A., Newlon, C., Pfaff, M., and Smyslova, O. (2013). Correlating the effects of flow and telepresence in virtual worlds: enhancing our understanding of user behavior in game-based learning. Comput. Hum. Behav. 29, 1113–1121. doi: 10.1016/j.chb.2012.10.003
Fogg, B. J., and Tseng, H. (1999). “The Elements of Computer Credibility,” in CHI’99 Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. (New York: ACM), 80–87.
Gallon, L., Abénia, A., Dubergey, F., and Negui, M. (2019). “Using a Telepresence robot in an educational context,” in Proceedings of the International Conference on Frontiers in Education: Computer Science and Computer Engineering (FECS). The Steering Committee of the World Congress in Computer Science, Computer Engineering and Applied Computing (World Comp). 16–22.
Gallon, L., Dubergey, F., and Negui, M. (2017). Telepresence robot: a numerical tool used by “Sapad” to make prevented student present La nouvelle revue de l’adaptation et de la scolarisation. 157–171.
Goza, S. M., Ambrose, R. O., Diftler, M. A., and Spain, I. M. (2004). “Telepresence control of the NASA/DARPA robonaut on a mobility platform,” in Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. 623–629.
Hassanein, K., and Head, M. (2007). Manipulating perceived social presence through the web interface and its impact on attitude towards online shopping. Int. J. Hum. Comput. 65, 689–708. doi: 10.1016/j.ijhcs.2006.11.018
Hayes, E., and Ohrnberger, M. (2013). The gamer generation teaches school: the gaming practices and attitudes towards Technology of pre-Service Teachers. J. Technol. Teach. Educ. 21, 153–177.
Hernandez, F., Waechter, M., and Bullinger, A. C. (2021). “A first approach for Implementing a Telepresence Robot in an Industrial environment.” in International Conference on Applied Human Factors and Ergonomics. (Cham: Springer), 141–146.
Horvath, K., and Lombard, M. (2010). Social and spatial presence: an application to optimize human-computer interaction. Psychol. J. 8, 87–114.
James, M., Wise, D., and Van Langenhove, L. (2019). Virtual strategic positioning to create social presence: reporting on the use of a telepresence robot. Pap. Soc. Represent. 28, 2–1.
Joosse, M. (2017). Investigating positioning and gaze behaviors of social robots: People’s preferences, perceptions, and behaviour. PhD Dissertation. University of Twente.
Kaplan, K. J. (1977). Structure and process in interpersonal “distancing”. Environ. Psychol. Nonverbal. Behav. 1, 104–121. doi: 10.1007/BF01145460
Koceska, N., and Koceski, S. (2022). Supporting elderly’s independent living with a mobile robot platform. J. Univ. Comput. Sci. 28, 475–498. doi: 10.3897/jucs.76579
Lee, M. K., and Takayama, L., (2011). “Now, I have a body: uses and social norms for mobile remote presence in the workplace,” in Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (CHI’11). (New York, NY: ACM), 33–42.
Lei, M., Clemente, I. M., Liu, H., and Bell, J. (2022). The acceptance of telepresence robots in higher education. Int. J. Soc. Robot. 14, 1025–1042. doi: 10.1007/s12369-021-00837-y
Leichtmann, B., Nitsch, V., and Rosenthal-von der Pütten, A. M. (2021). Analyzing socially acceptable human-robot interaction holistically–a social-psychological multi-level approach (no. RWTH-2021-08714). Lehrstuhl und Institut für Arbeitswissenschaft.
Leoste, J., Kikkas, K., Tammemäe, K., Rebane, M., Laugasson, E., and Hakk, K. (2022). “Telepresence robots in higher education–the current state of research” in Telepresence robots in higher education – The current state of research. eds. W. Lepuschitz and M. Merdan
Lister, T. (2020). Meaningful engagement via robotic telepresence: an exploratory case study. Curr. Issue. Emerg. eLearn. 6, 1–19.
Lombard, M., and Snyder-Duch, J. (2001). Interactive advertising and presence: a framework. J. Interact. Advert. 1, 56–65. doi: 10.1080/15252019.2001.10722051
Lomranz, J. (1976). Cultural variations in personal space. J. Soc. Psychol. 99, 21–27. doi: 10.1080/00224545.1976.9924743
Marescaux, J., Leroy, J., Rubino, F., Smith, M., Vix, M., Simone, M., et al. (2002). Transcontinental robot-assisted remote telesurgery: feasibility and potential applications. Ann. Surg. 235, 300–301. doi: 10.1097/00000658-200204000-00005
McCreery, M. P., Vallett, D. B., and Clark, C. (2015). Social interaction in a virtual environment: examining socio-spatial interactivity and social presence using behavioral analytics. Comput. Hum. Behav. 51, 203–206. doi: 10.1016/j.chb.2015.04.044
Mead, R., and Mataric, M. J. (2012). “A probabilistic framework for autonomous proxemic control in situated and mobile human-robot interaction,” in Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction (HRI ‘12). (New York, NY: Association for Computing Machinery), 193–194.
Mordor Intelligence (2021). Telepresence robots market - growth, trends, COVID-19 impact, and forecasts (2022–2027). Available at: https://www.mordorintelligence.com/industry-reports/telepresence-robots-market (Accessed December 9, 2022).
Moyle, W., Jones, C., and Sung, B. (2019). Telepresence robots: encouraging interactive communication between family carers and people with dementia. Australas J. Ageing 39, e127–e133. doi: 10.1111/ajag.12713
Mumm, J., and Mutlu, B. (2011). “Human-robot proxemics: physical and psychological distancing in human-robot interaction.” in Proceedings of the 6th international conference on human-robot interaction. pp. 331–338.
Muratbekova-Touron, M., and Leon, E. (2021). “Is there anybody out there?” Using a telepresence robot to engage in face time at the office. Inf. Technol. People, doi: 10.1108/ITP-01-2021-0080
Nakanishi, H., Murakami, Y., Nogami, D., and Ishiguro, H. (2008). “Minimum move-ment matters: impact of robot-mounted cameras on social telepresence.” in Proceedings of the 2008 ACM conference on computer supported cooperative work. pp. 303–312.
Newhart, V. A., Warschauer, M., and Sender, L. (2016). Virtual inclusion via telepresence robots in the classroom: an exploratory case study. Int. J. Technol. Learn. 23, 9–25. doi: 10.18848/2327-0144/CGP/v23i04/9-25
Nowak, K. L., and Biocca, F. (2003). The effect of the agency and anthropomorphism on users' sense of telepresence, copresence, and social presence in virtual environments. Presence 12, 481–494. doi: 10.1162/105474603322761289
O’Neill, L., Murphy, M., Gray, D., and Stoner, T. (2001). An MRP system for surgical linen management at a large hospital. J. Med. Syst. 25, 63–71. doi: 10.1023/A:1005688416572
Page, A., Charteris, J., and Berman, J. (2020). Telepresence robot use for children with chronic illness in Australian schools: a scoping review and thematic analysis. Int. J. Soc. Robot. 13, 1281–1293. doi: 10.1007/s12369-020-00714-0
Patterson, M. L. (1976). An arousal model of interpersonal intimacy. Psychol. Rev. 83, 235–245. doi: 10.1037/0033-295X.83.3.235
Reckwitz, A. (2002). Toward a theory of social practices: a development in culturalist theorizing. Eur. J. Soc. Theory 5, 243–263. doi: 10.1177/13684310222225432
Sardar, A., Joosse, M., Weiss, A., and Evers, V. (2012). “Don’t stand so close to me: users' attitudinal and behavioral responses to personal space invasion by robots.” in Proceedings of the seventh annual ACM/IEEE international conference on human-robot interaction. pp. 229–230.
Saunderson, S., and Nejat, G. (2019). How robots influence humans: a survey of nonverbal communication in social human–robot interaction. Int. J. Soc. Robot. 11, 575–608. doi: 10.1007/s12369-019-00523-0
Schouten, A. P., Portegies, T. C., Withuis, I., Willemsen, L. M., and Mazerant-Dubois, K. (2022). Robomorphism: examining the effects of telepresence robots on between-student cooperation. Comput. Hum. Behav. 126:106980. doi: 10.1016/j.chb.2021.106980
Shen, S., Tennent, H., Claure, H., and Jung, M. (2018). “My Telepresence, my culture? An intercultural investigation of Telepresence robot Operators' interpersonal distance behaviors.” in Proceedings of the 2018 CHI conference on human factors in computing systems. pp. 1–11.
Strengers, Y. (2015). Meeting in the global workplace: air travel, telepresence and the body. Mobilities 10, 592–608. doi: 10.1080/17450101.2014.902655
Takayama, L., and Go, J. (2012). “Mixing metaphors in Mobile remote presence.” in Proceedings of the ACM 2012 conference on computer supported cooperative work, CSCW’12. ACM, New York, NY, USA.
Takayama, L., and Pantofaru, C. (2009). “Influences on proxemic behaviors in human-robot interaction,” in 2009 IEEE/RSJ international conference on intelligent robots and systems. (IEEE), 5495–5502.
Teo, T., Fan, X., and Du, J. (2015). Technology acceptance among pre-service teachers: does gender matter? Australas. J. Educ. Technol. 31, 235–251. doi: 10.14742/ajet.1672
Triandis, H. C., Davis, E. E., and Takezawa, S.-I. (1965). Some determinants of social distance among American, German, and Japanese students. J. Pers. Soc. Psychol. 2, 540–551. doi: 10.1037/h0022481
Tsai, T. C., Hsu, Y. L., Ma, A. I., King, T., and Wu, C. H. (2007). Developing a telepresence robot for interpersonal communication with the elderly in a home environment. Telemed. J. e-Health 13, 407–424. doi: 10.1089/tmj.2006.0068
Tsui, K. M., Desai, M., Yanco, H. A., and Uhlik, C. (2011). “Exploring use cases for telepresence robots,” in Proceedings of the 6th International Conference on Human-Robot Interaction. (ACM).
Van Erp, J. B., Sallaberry, C., Brekelmans, C., Dresscher, D., Ter Haar, F., Englebienne, G., et al. (2022). “What comes after Telepresence? Embodiment, social presence and transporting one’s functional and social self.” in 2022 IEEE international conference on systems, man, and cybernetics (SMC). pp. 2067–2072. IEEE.
van Oosterhout, T., and Visser, A. (2008). “A visual method for robot proxemics measurements,” in Proceedings of Metrics for Human-Robot Interaction: A Workshop at the Third ACM/IEEE international Conference on Human-Robot Interaction (HRI 2008). Citeseer. 61–68.
Verified Market Research (2022). Global Telepresence robot market size by component (head, body), by type (stationary, mobile), by application education, healthcare, enterprise, homecare, By geographic scope and forecast. Available at: https://www.verifiedmarketresearch.com/product/telepresence-robot-market/ (Accessed December 9, 2022).
Virkus, S., Leoste, J., Marmor, K., Kasuk, T., and Talsiainen, A. (2022). Telepresence robots from the perspective of psychology and educational sciences. Information and Learning Sciences (In publishing)
Walters, M. L., Dautenhahn, K., Koay, K. L., Kaouri, C., Woods, S. N., Nehaniv, C. L., et al. (2005). “The influence of Subjects' personality traits on predicting comfortable human-robot approach Distances'.” in Proceedings of Cog Sci 2005 Workshop: Toward Social Mechanisms of Android Science. 29–37.
Walters, M. L., Dautenhahn, K., Te Boekhorst, R., Koay, K. L., Syrdal, D. S., and Nehaniv, C. L. (2009). An empirical framework for human-robot proxemics. Procs of New Frontiers in Human-Robot Interaction. Available at: https://uhra.herts.ac.uk/bitstream/handle/2299/9670/903515.pdf?sequence=1 (Accessed December 9, 2022).
Keywords: social presence, telepresence robots, remote communication, interpersonal distance, proximity, social norms
Citation: Leoste J, Heidmets M, Virkus S, Talisainen A, Rebane M, Kasuk T, Tammemäe K, Kangur K, Kikkas K and Marmor K (2023) Keeping distance with a telepresence robot: A pilot study. Front. Educ. 7:1046461. doi: 10.3389/feduc.2022.1046461
Edited by:
Abdul Wahab, International Islamic University Malaysia, MalaysiaReviewed by:
Mehmet Kemal Aydin, Hittite University, TürkiyeCopyright © 2023 Leoste, Heidmets, Virkus, Talisainen, Rebane, Kasuk, Tammemäe, Kangur, Kikkas and Marmor. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Janika Leoste, ✉ amFuaWthLmxlb3N0ZUB0YWx0ZWNoLmVl
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.