 Adam James Fenton*
Adam James Fenton* Ioannis Chapsos
Ioannis Chapsos- Centre for Trust, Peace and Social Relations, Coventry University, Coventry, United Kingdom
This article considers the current technological developments in uncrewed Maritime Autonomous Surface Ships (MASS), examines the legal and regulatory challenges that they raise, and describes the ways in which an international body (the International Maritime Organization, IMO) and a national agency (UK Maritime and Coastguard Agency, MCA) are engaging with the massive task of regulating this new development in shipping. To achieve the research aim, the article combines primary data from interviews with industry, government and international regulators, a survey completed by practitioners, experts and academics working in the field, and relevant secondary sources. The article makes an original contribution by noting and analyzing the approaches of the IMO and the UK government–bodies which are highly influential in shaping global attitudes, preparation, adoption and responses to such innovative technologies like MASS–and how they have engaged with the difficult question of regulating the various legal, technical and cybersecurity challenges that they raise. It concludes that for the MASS technology to fulfill its potential and gradually see the integration of such vessels in international shipping in a safe, secure and sustainable way, the international community needs to work together, and update by consensus the key legal instruments and policy documents. In this major task, the UK approach and IMO's leading role can play a protagonist role in developing best practice and implementing respectively.
1. Introduction–A transformation in shipping is coming
Autonomous “driverless” ships represent “the intersection of the Maritime Transportation System and Industry 4.0” (Kessler and Shepard, 2022) where “big data, machine learning, and artificial intelligence” are driving accelerated change with the potential to transform and disrupt a US$14 trillion shipping industry (ICS, 2022). Any technological/industrial development with that kind of potentiality will draw interest from a broad cross-section of stakeholders seeking to influence the trajectory of the technology and position themselves as its implementation is rolled out. This will necessarily involve intense and warranted debate about the desirability, legality, and impacts of the new technology. It raises crucial questions about how the technology can be accommodated under a complex web of international laws, norms, and conventions that have developed over hundreds of years on a universal, and almost completely unwritten, assumption that ships have human masters and crews who are on board the ship.
This article considers the current technological developments in un-crewed ships, examines the legal and regulatory challenges that they raise, and describes the ways in which an international body (the International Maritime Organization, IMO) and a national agency (UK Maritime and Coastguard Agency, MCA) are engaging with the massive task of regulating this new development in shipping. As ship manufacturers, operators and insurers develop in this field, they are “looking at the regulators to know what we shall comply with?” (IMO, 2022a). What are the frameworks, standards and certification that will apply? In this context it is crucial to know how regulators are responding and preparing for MASS; the focus of this article. The article makes an entirely new contribution by noting and analyzing the approaches of the IMO and the UK government–bodies which are highly influential in shaping global attitudes, preparation, adoption and responses to autonomous vessels–and how they have engaged with the difficult question of regulating the various legal, technical and cybersecurity challenges that they raise. Furthermore, the authors acknowledge the IMO developed taxonomy of MASS (as analyzed in detail in Section 1.3) but for the purpose of this article and to avoid confusion of the reader over the interchangeable use of terms (such as for example “remotely controlled,” “autonomous,” etc.), the term Maritime Autonomous Surface Ships (MASS) is used as an overarching and inclusive term for all these categories. Whenever in this article a reference is made about a specific category of these vessels, the respective term is used by the authors. Structurally, the article will be divided into five sections. Section 1 makes some observations on maritime cybersecurity, given their entire dependence on cyber and IT technology, and notes the terminology and current developments in autonomous ships. Section 2 then examines the IMO approach to MASS and lays the groundwork for Section 3 to discuss the main legal challenges such as the “threshold” legal question of defining “ships” in international law. Section 4 is an applied, descriptive analysis of the UK government's approach which has sought to balance regulatory and safety concerns with encouraging world-leading innovation. Finally, Section 5 concludes by summarizing the preceding discussion and offers remarks and reflections on future directions in the law and policy of autonomous ships.
1.1. Methodology
Methodology for the article combines secondary sources including academic articles, international law texts such as the UN Convention on the Law of the Sea (UNCLOS), other international maritime treaties, case law, media reports, and gray literature.
Primary data were collected through interviews with government and international regulators such as the IMO, the UK Maritime & Coastguard Agency, and industry representatives such as MSubs. An online survey was conducted utilizing the Joint Information Systems Committee (JISC) platform. Responses were requested only from respondents who had some expert knowledge of the topic and for that reason participants were invited to complete the survey via LinkedIn professional groups and JISC professional Maritime Security mailing list (bWFyaXRpbWVzZWN1cml0eUBqaXNjbWFpbC5hYy51aw==). As a result, the survey was completed by 28 practitioners, experts and academics working in the field.
1.2. Cybersecurity in conventional and uncrewed ships
Cybersecurity in shipping is an enormously important field presenting unique opportunities but equally importantly vulnerabilities and challenges that are only beginning to be fully understood. Tam and Jones notes “due to the nature of maritime-based travel and environments, modern ship technology is significantly different from both typical computing systems and traditional maritime tools… [there are] cyber vulnerabilities and outcomes, specific to the shipping industry…the maritime industry is roughly 20 years behind equivalent sectors in terms of cybersecurity” (Tam and Jones, 2018b). Cyber penetration tests conducted by Naval Dome revealed “with startling simplicity the ease with which hackers can access and over-ride ship critical systems” (AJOT, 2017) demonstrating an ability to spoof Electronic Chart Display (ECDIS) positions, delete and manipulate radar displays, and override essential systems such as steering and ballast. In interview, a marine cyber security practitioner pointed out that computer systems on most ships are “at least 10 years old” and systems like satellite antennas are particularly vulnerable stating: “you can find a potential victim and hack into their satellite antenna in about two and half minutes providing access to critical information and systems” (Interview with Maritime Cybersecurity Expert Practitioner, 2022).
Whereas, cybersecurity in crewed ships is only just beginning to be researched, discussed and analyzed in any significant depth, the prospect of autonomous, uncrewed vessels presents an entirely new and complex twist on cybersecurity, as the entire ship—every system and aspect of the ship's operation—will be somehow linked to cyber. Monitoring, communications, navigation, engines—all will depend on interconnected devices, sensors, machine learning, cameras, supervisory control and data acquisition (SCADA), all digitized, and connected via electromagnetic communications capable of being hacked and overridden. Commenting on the cybersecurity aspects of autonomous ships one US Coast Guard observer noted “autonomous vessels will be prime targets for attack. Cybersecurity cannot be an afterthought” (USCG, 2022). Another maritime cybersecurity expert commented “autonomous and unmanned vessels are going to exacerbate all the problems, primarily because I have seen a dearth of research on securing autonomous vessels. I've not seen any paper or document anywhere that suggests that any autonomous vessel was built with security in mind from the keel up…they're going to have cameras on board, and I think it is unreasonable to believe that there can be a secure communication between the camera and a shore station that is invulnerable to bad guys getting in there” (Comments from Maritime Cybersecurity expert in Maritime Cybersecurity Webinar, 2022). In a systematic analysis of cybersecurity in autonomous ships Tam and Jones applied the MaCRA model to various ship systems such as AIS, GNSS, automatic mooring, deck and cargo machinery, RADAR, sensors, cameras, and Voyage Data Recorders (VDRs), cross referenced with the reward and ease of exploit for malicious actors. The results suggested “the most at risk systems for the future are AIS, GNSS, and growing interconnected networks of sensors” and that “safe protocols for remote satellite-based communications can drastically decrease risks for future autonomous ships” (Tam and Jones, 2018a).
Lohn opines that “machine learning systems—the core of modern AI—are rife with vulnerabilities” which “permit hackers to manipulate” (Lohn, 2020) them. It may be possible to insert “a few pixels”—invisible to the human eye—which “can make an AI misidentify a stop sign for a 45 MPH sign” (Woodie, 2020). In the maritime sector, research by Longo et al. (2022) has shown that they can insert radar blips and “delete existing ones, which is really nasty as a vulnerability” (Interview with computer engineering researcher, 2022). In a separate experiment, Longo demonstrated, that, knowing COLREG Rule 14—i.e., when two ships are approaching head on both ships must alter course to starboard—gives hackers a kind of “superpower.” In “97,000 computer simulations” they were able to show collision avoidance algorithms would predictably maneuver a ship to a location specified by the hackers (Longo et al., 2022). Longo and colleagues warn against “blind trust in the information coming from navigation sensors” and that “sensors can be subjected to malfunctioning, or even worse, cyber-attackers may hijack their data. This last scenario will be more and more common in the near future and represents a dangerous threat that future generation ships must face” (Longo et al., 2022).
To ensure the secure functioning of this new generation of ships requires a ground-up approach incorporating cybersecurity into every aspect of ship design. Accordingly policy-makers and regulators will need to be familiar with the technological capabilities and shape policy, law and regulations accordingly. The UK government's Marine Guidance Note (MGN) 669 does this, and is discussed further below in Section 4. In 2017, the IMO released Resolution MSC 428 (98) which recognized “the urgent need to raise awareness on cyber risk threats and vulnerabilities” and encouraged “administrations to ensure that cyber risks are appropriately addressed in safety management systems” (Resolution, 2017) as part of mandatory certification processes. As one expert commentator noted however, “the problem really is enforcement. I think that the best enforcement is going to come from insurance companies because the insurance companies are in a position to say you need to show a particular cyber profile, you need to make cyber part of a safety culture, the same safety culture we have in the rest of the maritime industry. And if you can't demonstrate that you are cyber safe, we're not going to insure your vessels. That will get people's attention” (Comments from Maritime Cybersecurity expert in Maritime Cybersecurity Webinar, 2022).
1.3. Taxonomy, terminology and general observations on MASS
It is worth noting here that “autonomous” ships are not all created equal. The IMO has devised a four-point taxonomy (IMO, 2021a) of MASS which encompasses ships with human crews aboard, but with some automated systems (Degree 1), remotely controlled ships with human crew aboard (Degree 2), remotely controlled ships with no human crew aboard (Degree 3) and ships that are able to operate autonomously with no human controller, either on board or at a remote location (Degree 4). Given that Degree 1 ships are the current norm in shipping, and Degree 2 ships will remain under on-board human supervision ready to “take control and operate the shipboard systems” if necessary, the real concern and potential disruption to shipping comes from Degree 3 and 4 ships. The thought of commercial and military ships traversing vast oceans, on or below the surface, with cargo (Yara, 2021), passengers (Mehta et al., 2021), and even weapons (Larter, 2021), but no crew is both alarming and fascinating and demands a systematic and thorough analysis from policy-makers, regulators, academia and the wider public.
It can also be noted that “autonomous” and “uncrewed” (Fenton and Chapsos, 2022)1 are not equivalent terms. A vessel may be uncrewed but not autonomous if it is remotely controlled by a human operator (Degree 3). However, a vessel may also be autonomous but able to carry crew—the crew may be aboard to supervise or maintain the ship only. Some vessels will operate autonomously for some sections of a voyage, and revert to human control at others, when approaching a port, and berthing, for example. Some vessels are designed “from the ground up” with no facilities for humans on-board—i.e., no accommodation, galley, safety equipment such as lifeboats; the autonomous vessel Mayflower, or MSubs autonomous submarine S202 (Interview with representative from autonomous vessel manufacturer MSubs, 2022) are examples. Others are conventional ships retrofitted with autonomous technology allowing them to operate with human crew; MSubs S201 is “an autonomous sub adapted from a crewed vessel” (Interview with representative from autonomous vessel manufacturer MSubs, 2022). The “world's first electric, zero-emissions autonomous container ship” Yara Birkeland (Yara, 2022) was designed with a removable bridge for a human crew. Starting operations in spring 2022 “it will start a 2-year trial period to become autonomous and certified as an autonomous ship” at which time the bridge for crew will be removed.
Some autonomous vessels are relatively small; Sea-Kit's USV Maxlimer which completed an international voyage between the UK and Belgium in 2019 [Interview with representative from Maritime Coastguard Agency (MCA), 2022] measures 11.75 meters length overall (LOA) and “the entire vessel can be fitted inside a single standard ISO 40 ft (12.2 m) shipping container” (RINA, 2017). Yara Birkeland, on the other hand, has an LOA of 80 m. The US Navy is developing Large Unmanned Surface Vehicles (LUSVs) “200 feet to 300 feet in length…which would make them the size of a corvette” and Extra Large Unmanned Undersea Vehicles (XLUUVs) “roughly the size of a subway car” (O'Rourke, 2022) but also operates a fleet of Saildrone Explorers around seven meters LOA and roughly double the size of a windsurfer (Gambrell, 2022). In May 2022, China launched a “gigantic mothership to launch swarms of unmanned aerial vehicles” the “290 feet long and 20 feet high” Zhu Hai Yun (Saballa, 2022). As such, autonomous and uncrewed ships come in a wide range of shapes, sizes, designs and capabilities and this is a crucial factor in creating or adapting policies and laws that regulate their use. Although it becomes clear that autonomous vessels are already emerging and fit in multiple commercial/civilian, law enforcement and military applications, this paper and the analysis that follows on the IMO and UK Government approaches toward regulating this new development in shipping will be focused exclusively on the commercial/civilian sector, mainly due to the different status of military vessels in the UNCLOS.
1.4. Some certainties amid a sea of uncertainty
While there are a whole host of uncertainties raised by this emerging technology, some of which will be discussed further in this article, four things are certain.
First, the technology is here2 and it is not likely to go away—the many documented benefits of uncrewed ships include reduced running costs (CBInsights, 2018; Ghaderi, 2019), improved safety with up to 95% of shipping accidents due to human error (Allianz, 2019) more streamlined and efficient design which will provide fuel efficiencies (Askari and Hossain, 2022) even environmental benefits from “the lack of or very reduced production of garbage from such ships” (Klein et al., 2020). While the costs of crew will vary as a percentage of the overall running costs depending on the size and complexity of the ship, crew-related expenses can account for anywhere up to 30% of a ship's operating budget (CBInsights, 2018) the savings in fuel, salaries, and crew costs could be in the millions of dollars per autonomous ship (O'Brien, 2018; Askari and Hossain, 2022). Automated systems are also better suited to dull, dirty and dangerous jobs than humans, for example cleaning up the massive patches of oceanic marine litter (Madricardo et al., 2020).
The promising advantages outlined above are likely to sustain interest from commercial, governmental and even criminal organizations—all of which are sensitive to risk and costs—driving “a steady transition from manned through to fully autonomous as the technology is tested and algorithms are improved through machine learning” (O'Brien, 2018). To be clear, uncrewed, and in particular autonomous vessels, are still largely in the experimental/developmental stages. They face a number of technological challenges, not least of which is how to handle maintenance and inevitable mechanical failures at sea “without fully redundant backup systems where you don't have to rely on people on board, but this will be very, very expensive” (IMO, 2022a). The transition to autonomous will not happen overnight, but it has certainly begun and appears to be gathering speed.
Second, the ramping up of interest and development in un-crewed ships has already begun to impact a range of agencies and actors involved in shipping, whether military (UKRN, 2021, 2022; Fuentes, 2022; Gambrell, 2022; Verma, 2022), commercial (Chircop, 2018; Soyer and Tettenborn, 2021), governmental (Hound, 2019; Taeihagh and Lim, 2019; MOD, 2022; UKMIA, 2022); or whether they operate in the fields of law (Surian, 2020), insurance (Allianz, 2019), cybersecurity (Tam and Jones, 2018b; Kardakova et al., 2020), engineering (IMarEST, 2017), ship design (Koushan, 2018), communications (Amos, 2022), space travel (Howell, 2021), or indeed any other area with a connection to the maritime domain. Even the operations of organized criminal enterprises such as smugglers (Sutton, 2019), pirates and terrorists will be (Petrig, 2021), or have already been (Rocks, 2022), transformed to some extent by this technology.
Third, national and international agencies have already begun the “regulatory marathon” (Soyer, 2021) to prepare for the widespread operations of MASS, with the “overriding objective to ensure that such vessels operate with an adequate level of “safety” compared to vessels under the control of human beings” (Soyer, 2021). The IMO's Regulatory Scoping Exercise (RSE) which sought “to assess the degree to which the existing regulatory framework might be affected in order to address MASS operations” (IMO, 2021a) was described by the IMO Secretary-General as “one of the biggest projects going forward in the IMO in many years” (Allen, 2018).
Fourth, stakeholders across industry, government and academia, are divided in their opinions about how desirable autonomous technology in shipping is, and how quickly laws should be revised to accommodate their widespread operation. Allen notes the divide between “advocates” and “skeptics”; and that “the International Chamber of Shipping voiced its concern that decisions regarding UMV3 at the International Maritime Organization are being imprudently rushed” (Allen, 2018). Advising a more restrained, cautious approach Allen warns that “questions regarding the status of UMV under international law must be confronted” (Allen, 2018). Results from the survey suggest that support for the idea of MASS may be gaining traction with 53.6% of respondents agreeing that autonomous ships will be implemented in the near to medium future, and only 10.7% agreeing with the statement that MASS should “not be allowed to operate in national or international waters.” The “definitional” problem is discussed below in Section 3 before moving on to an examination of the UK's approach to regulating MASS in Section 4.
2. The IMO regulatory scoping exercise and a goal-based code
In 2017 the IMO, noting the developments in autonomous shipping technology, began an RSE “for the use of Maritime Autonomous Surface Ships” (IMO, 2021a). The RSE sought to systematically comb through the articles of each of its many shipping conventions “to identify exactly where the problems, gaps or barriers are” [Interview with representative from Maritime Coastguard Agency (MCA), 2022] that would (A) apply to MASS and prevent their operation (B) apply to MASS but not prevent their operation, no action needed (C) apply to MASS and not prevent their operation, but might contain gaps, and need to be amended or clarified, or (D) had no application to MASS (IMO, 2021a). Four IMO Committees—the Maritime Safety Committee (MSC), the Legal Committee (LEG), the Facilitation Committee (FAL), and the Marine Environment Protection Committee were engaged in this task. The MSC released the Outcome of the Regulatory Scoping Exercise Circular 1638 (IMO, 2021a) in 2021, the LEG released its equivalent in December 2021 (IMO, 2021b). A “Joint MSC/LEG/FAL Working Group, as a cross-cutting mechanism to address common issues” (IMO, 2023) had its first meeting in September 2022.
After the first step outlined above, a second step was conducted to “analyse and determine the most appropriate way of addressing MASS operations” and whether the best approach would be to examine the extent to which the existing instruments would be sufficient or new ones would be required (IMO, 2021a).
In the RSE report, the IMO considered the possibility of a MASS Code, stating:
The most appropriate ways of addressing the many common potential gaps and/or themes, which cut across several instruments, could preferably be addressed holistically through a new instrument (e.g., a MASS Code). Addressing every instrument or SOLAS chapter separately could lead to inconsistencies, confusion and raise potential barriers for the application of existing regulations to conventional ships. Therefore, a MASS instrument, instead of amending individual instruments, may be considered which can be made mandatory by means of amending an existing IMO convention, such as SOLAS (IMO, 2021a).
This approach was further supported by findings from the survey that was conducted which indicate almost 86% of participants acknowledged that the existing regulatory framework is not sufficient to cover the operation of MASS. Furthermore, data collected through interviews with members of the committee suggest that the IMO “has developed the structure for a goal-based code” with a “non-mandatory version available in 2025, followed by a mandatory code in 2028” [Interview with representative from Maritime Coastguard Agency (MCA), 2022]. This approach will achieve two main objectives. Being goal-based acknowledges that the technology is developing and that industry will need to find technological solutions to problems that are raised by un-crewed ships. Take fire safety as an example, with no crew aboard to fight fires “you must be able to remotely activate systems.” This is an example of a goal set by regulators “that industry will have to meet and they have to present a case for how they meet that particular goal and it gives them the flexibility to be able to be innovative in their approach” [Interview with representative from Maritime Coastguard Agency (MCA), 2022]. Another example is that cybersecurity is built-in to the ship's design from the earliest stages, discussed further below with regard to the MCA's certification process set out in MGN 664. Being non-mandatory, before going mandatory 3 years later, will provide both the IMO and industry time to learn and prepare; “we're still learning, the industry is still learning and it's important that we all learn from those lessons before we get to the point of putting it into a mandatory set of rules” commented a UK regulator and member of the IMO MSC Committee in Interview with representative from Maritime Coastguard Agency (MCA) (2022).
Data from interviews suggests that the most likely method of implementing a MASS Code will be through an amendment to SOLAS using the tacit amendment procedure. Similar to how the ISPS and Polar Code were implemented “so if you're a SOLAS contracting party, through the tacit amendment procedure you will have a new SOLAS chapter implementing a MASS Code” (IMO, 2022a). “A non-mandatory code could be adopted immediately once the MSC approves it. With the mandatory code following a minimum of 2 years later” (IMO, 2022a) making 2026 the earliest date for a mandatory MASS code. It is worth noting that in general “SOLAS applies to ships of 500 Gross Tons (GT) and above on international voyages” (IMO, 2022a). An exemption to apply the MASS code to smaller vessels—such as that used to apply Automatic Identification Systems (AIS) to smaller ships of over 300 GT on international voyages and all passenger ships, regardless of size—could be used to ensure that MASS below 500 GT would be included in the code.
3. The definitional problem—Are MASS “ships”?
The IMO's Legal Committee noted in March 2022 that “MASS should operate within the legal framework of the UNCLOS” (IMO, 2022b). This raises a raft of questions about how un-crewed craft fit into the UNCLOS framework—often referred to as the “Constitution of the Oceans.” Questions such as, must they have a flag state? Are they registered in the same way as crewed ships? Must they comply with safety codes such as SOLAS? What must they display on their hulls; a flag, notice of “un-crewed status,” lights and shapes? What navigation rights do they have in territorial waters and high seas? Are they subject to the exclusive jurisdiction of the flag state on the high seas? What are their obligations with respect to other vessels and mariners? Can they be employed in law enforcement and hot pursuit? Are shore-side operators “seafarers” who must be certified? Is a remote operator the “master”? Who bears liability for an accident? And a plethora of others which currently can't be answered. While some international voyages of MASS have already occurred, the Mayflower and the Maxlimer mentioned above are two examples, these have largely been experimental trials. Regular operation of MASS remains largely within territorial waters of individual states. This demonstrates that, although at this stage of the technological development, states can take unilateral action and operate such vessels solely within territorial waters, answers to the above questions require a much broader consensus and global reach, hence the IMO's protagonist role in this context.
Some of the answers to these questions depend on whether a particular un-crewed vessel is a “ship” or not under UNCLOS, others will depend on the outcome of the IMO's MASS code, and yet others will depend on the approach of individual countries. On the “threshold” question of whether they are “ships” this has been the subject of a number of articles from legal scholars (Allen, 2012, 2018; Gauci, 2016; Chircop, 2018; Daum, 2018; Veal et al., 2019; Dean and Clack, 2020; McKenzie, 2020; Suri, 2020; Baughen, 2021; Ringbom et al., 2021; Soyer and Tettenborn, 2021) which note, almost without exception, that “UNCLOS uses the terms “ship” and “vessel” interchangeably but fails to define either term” (Veal et al., 2019). Are MASS “ships/vessels” or are they merely some sub-class, with lesser status and rights, such as an “object” “device” or “equipment”? It is worth highlighting here that, although UNCLOS does not provide a definition of ships and/or vessels in general, it does provide a definition of warships (UNCLOS article 29). However, this definition does not fall within the scope of this article, as this research focuses exclusively on commercial/civilian (non-military) ships.
The question is of some importance as significant legal consequences flow from being categorized as a “ship.” Under UNCLOS, ships enjoy the fundamental rights of freedom of navigation, innocent passage and transit passage. Article 90 provides that “Every State, whether coastal or land-locked, has the right to sail ships flying its flag on the high seas” (UN Convention on the Law of the Sea, 1982). The question is of importance to commercial operations as well—A “ship” is liable in many jurisdictions to maritime liens which allow the vessel to be seized in rem to satisfy payment of outstanding debts (Allen, 2018).
Recalling the diverse range of MASS outlined above, there is no doubt, some MASS whether designed for scientific research, monitoring or surveillance, bear little to no resemblance to what most people would picture when they think of a classic “ship.” In his thorough analysis of autonomous ships and the laws of treaty interpretation, Allen notes that “established treaty interpretation rules” exist for precisely these situations and must be consulted, urging that “respect for increasingly fragile global rules-based order requires nothing less” (Allen, 2018). The Vienna Convention on the Law of Treaties sets out that where a treaty fails to define key terms, recourse can be had to “an examination of the ordinary meaning of the terms,” followed by an examination of definitions in other treaties, national statutory definitions, and definitions offered from case law. This opens up the possibility of a vast investigation into the “4,000 year history” of shipping, international statutes and case law, and “how those terms [ship and vessel] have been used.” Noting that maritime history is no stranger to technological innovation, Allen points out that “as hull material and the means of propulsion evolved over the centuries, the one constant throughout the genealogy was that…all of the vessels were manned” (Allen, 2018). Taking a similar approach, Daum considers the historical uses of ships with “hollow hulls” for the purpose of transporting goods for trade which formed the basis of Hugo Grotius's Mare Liberum or Open Sea, and concludes “against this background it is submitted here that if a craft is not destined or able to conduct transportation it could hardly be categorized as a ship under the ILOS4” (Daum, 2018). The requirement for “transportation” however leads to inconsistencies and ignores the many non-transportation uses of ships such as scientific research, surveillance and patrolling, for example. Others urge that the “transportation function requirement [in US statute] should be eliminated” and replaced with “capable of traversing the sea” (Allen, 2018). Briefly, other crucial ship-defining criteria taken from general and case law definitions have included, among others: flotation, buoyancy, size, propulsion, movement through water and being capable of navigation. Jet-skis, barges, oil rigs, WIG aircraft, floating houses and other outliers have posed considerable challenges to a universal definition.
An examination of other international legal instruments such as the Treaty to Prevent Maritime Pollution (MARPOL) or the Collision Regulations (COLREGs) shows that the definition of a ship, in international law is necessarily variable, and depends on the goal of the instrument in question. A treaty aimed at eliminating maritime pollution for example will better achieve its goals by casting a wide net and defining “ships” broadly. The MARPOL convention (The International Convention for the Prevention of Pollution from Ships, 1973) defines ships at Art 2 (Tam and Jones, 2018b) “'Ship' means a vessel of any type whatsoever operating in the marine environment and includes hydrofoil boats, air-cushion vehicles, submersibles, floating craft, and fixed or floating platforms.” Under this approach anything which could potentially pollute the marine environment should be caught, for example even an oil platform attached the seabed and incapable of navigation, thus achieving the goal of the treaty to minimize pollution. Other international instruments such as the Collision Regulations (COLREGS) (IMO, 2019)5 for example, which sets out the rules for how ships should alter course to avoid collisions, among other things, contains a definition of “vessel” at Rule 3 (a) which “includes every description of water craft…capable of being used as a means of transportation on water.”
In the absence of a clear “ordinary” definition, “the preparatory work of the convention” may also be considered, but these “do not clarify the point” (Veal et al., 2019). Veal et al. note that “definitions of these key concepts may therefore be sought in other international conventions” such as the COLREGs, MARPOL and others, but this is also problematic because definitions in each of the IMOs international conventions “tend to define the type of “ship” to which the relevant convention applies in the context of the object of that particular convention. They are also inconsistent for this reason and thus unsuitable for the allocation of general rights of navigation in the ocean” (Veal et al., 2019).
An examination of individual countries' definitions, equally, provides no consistent definition. As Dean and Clack noted “each State signatory to the various international conventions will incorporate these conventions' articles and their amendments into national law in different ways” (Dean and Clack, 2020). The Dutch Civil Code refers to craft intended for “flotation.” China defines ships as “seagoing ships” not including military or small ships less than 20 gross tons. Norway for example requires a minimum length of 15 m, whereas Germany requires a “not insignificant size,” and the French Code makes several references to being “manned” with “seamen” making the presence of a crew a criterion for a ship (Dean and Clack, 2020). The UK's Merchant Shipping Act defines a ship as “every description of vessel used in navigation.” The US employs a broad definition of vessel in its Rules of Construction Act which includes “every description of watercraft or other artificial contrivance used, or capable of being used, as a means of transportation on water” (US Rules of Construction Act Section 3) (Title 1 US Code US Congress CHAPTER 1, 2022). It is perhaps for this reason that when the autonomous ship Mayflower completed a transatlantic crossing it was “towed the final 25 miles due to U.S. Coast Guard regulations against the operation of uncrewed vessels in coastal areas” (Executive, 2022).
Noting the complexity of the preceding discussion, and based on evidence collected as part of this research, this paper suggests that the lack of an internationally accepted definition will not be a barrier to the further advancement of the technology and the development, deployment and broad use of autonomous vessels. As the MCA's policy lead on MASS put it, “from our perspective this question of whether MASS are “ships” or not under UNCLOS is not a problem” [Interview with representative from Maritime Coastguard Agency (MCA), 2022]. Yet, if we want to see a gradual and harmonized integration of MASS into the international shipping in a structured, sustainable, safe and secure way, the burning questions asked at the beginning of this section have to be addressed. And for this to happen, consensus has to be reached at an international level, irrespectively of each individual state's unilateral and internal process in developing, certifying and using them. In this framework, this paper is fully in line with the IMO (2019) (COLREGs, see text footnote 5), where Rule 3 defines vessels to “…include every description of water craft, including non-displacement craft, WIG craft and seaplanes, used or capable of being used as a means of transportation on water.” It then goes on to make further distinctions between them based on their size and their purpose, hence highlighting that the “one formula fits all” approach doesn't work, and there are distinct cases that should be considered. It then goes on to define for example what lights each one of those categories of vessels should be displaying (Rule 22) in order to be recognizable at sea and help minimize accidents and collisions. In a similar vein, autonomous ships can be integrated in such conventions to enhance safety at sea by considering different categories (e.g., distinguish between sea gliders for research from container ships and workboats) with different requirements. A similar approach has been proposed to some extent also by the NGO Comité Maritime International (CMI) in its position paper on autonomous ships, where they noted that “large, self-propelled, cargo-carrying, commercially operated unmanned ships” will “probably have to be regarded as vessels/ships by virtue of their size, features and functions.” The report concluded that “the same obligations apply to unmanned ships and their flag states with respect to compliance with international rules. On the other hand, they also enjoy the same passage rights as other ships and cannot be refused access to other states' waters merely because they are not crewed.”
Of particular interest will be to examine what national governments, particularly influential leading ones such as the UK, are doing in this sphere. That is what the rest of this article will do in giving detailed attention to the UK approach to MASS.
4. The UK approach to regulating MASS
The UK government has taken a relatively proactive approach to engaging with and regulating autonomous vehicles in general, and maritime autonomous ships have also been part of this approach. The UK Maritime 2050 strategy paved the way in 2019 and identified new disruptive technologies like for example artificial intelligence (AI) as part of the new trends that are likely to emerge and change the maritime sector (UK Department for Transport, 2019). The strategy also reaffirms the vision and determination of the UK “[…] to be world leading in the design, manufacture, uptake, and use of smart shipping technologies. To achieve this, we will develop a UK legislative framework for autonomous vessels and lead efforts to establish an international regulatory framework” (UK Department for Transport, 2019). It also predicts that shipping companies will benefit from the UK's competitive register for technologically advanced and autonomous vessels (UK Department for Transport, 2019). It is noteworthy that, the strategy recommends separately the legislation for a domestic framework for autonomous vessels to allow testing in UK's territorial waters (UK Department for Transport, 2019), but it acknowledges that the ultimate task would be the development and establishment of the international one and the significance it bears.
The UK National Cyber Strategy (2022) emphasizes maintaining the UK's position as a “cyber power” to promote national “interests, values and visions of our global future.” Achieving this goal requires balancing the competing needs of safeguarding the community from risks posed by new technologies, while not stifling technological innovation and creativity. While it has been suggested that there should be more coordination between the Defense Maritime Regulator (DMR) which regulates autonomous tech in the defense sector—and the MCA which regulates the civilian sector (Interview with representative from autonomous vessel manufacturer MSubs, 2022) primary data collected as part of this research suggests that the UK government has engaged with regulating the technology with an awareness that it must promote world-leading innovation. And, with at least some awareness that if the “regulations are too strict the industry could pick up and relocate abroad where the regulations are more conducive such as Norway for example which is encouraging development in the area” (Interview with representative from autonomous vessel manufacturer MSubs, 2022).
In the civilian maritime sector, the main agency in this regard has been the Maritime and Coastguard Agency6 (MCA) which has issued guidance to developers of autonomous ships in the form of Marine Guidance Note (MGN) 664, and has released a draft revision to the Workboat Code Edition 3 due to be released, after public input, in mid-2023. The revised code will comprehensively embrace the use of uncrewed workboats and implement a system for regulating and certifying their operation. Meanwhile, Maritime UK has released a voluntary code of practice which “seeks to provide practical guidance for the design, construction and safe operation of autonomous and semi-autonomous MASS, primarily <24 m, while the more detailed regulatory framework for MASS is developed under the Merchant Shipping Act 1995” (UKMIA, 2022). Further, a draft “Vehicle Technology and Aviation Bill” is before parliament which will address the issue of insurance liability for automated vehicles. While it is directed primarily at road vehicles it is submitted that there is no reason that it, or the main principles contained in it regarding liability and insurance, could not also apply to autonomous ships.
4.1. Marine guidance note 664
Marine Guidance Note 664, issued by the MCA (2022a), “provides guidance on how to process an application for the certification of UK vessels wherever they may be, or other vessels operating in UK waters that use Innovative Technology.” The note thus provides a framework by which UK vessels operating within or outside UK waters, or foreign vessels operating inside UK waters, can gain certification from the UK government. It also approaches autonomous technology as just one of a number of “innovative technology” developments “which are not sufficiently managed…by the application of MCA accepted maritime regulations” and therefore applies to other developing technologies such as “emission reduction and other forms of ‘smart' maritime technology.” This seems to be a good approach which recognizes that (a) not all autonomous, automated, AI or machine learning technology is the same, and that there are degrees of autonomy and remote control which may be qualitatively distinct from each other and (b) autonomy should not be regarded as a standalone category, it is one of many developing innovations in a dynamic and fluid area of innovation which is sure to entail other innovations in future. An approach which applies to “innovative technology” rather than “autonomous technology” should be able to engage with those future innovations if and when they occur.
MGN 664 notes that its approach is informed by the guidelines for approval of alternatives and equivalents described in the IMO Marine Safety Council's MSC.1/Circ.1455. It thus places emphasis on the idea that “prescriptive regulations may sometimes restrain the level of innovation that is feasible in design” and that by establishing a “predictable and reliable process of submitting and approving the design making full use of state of the art risk assessment tools and techniques” a balance can be struck between safety and innovation, which appears to be an underlying approach of the UK government in this field. While this process arguably provides a best-practice model for regulators to engage with developing tech, the process for obtaining certification via MGN 664 is not an easy one. Table 1 below summarizes the process which involves four different stages, starting from Early Engagement with the MCA, through to Preliminary and Final Stages, leading to grant of certification and Operation. As such, although this is a massive step forward which sets the foundations for better regulation and state-regulated certification, there is obviously a long way to go and lessons to be drawn and learned through the gradual testing and implementation of this guidance, in order to achieve this balance between safety and innovation.
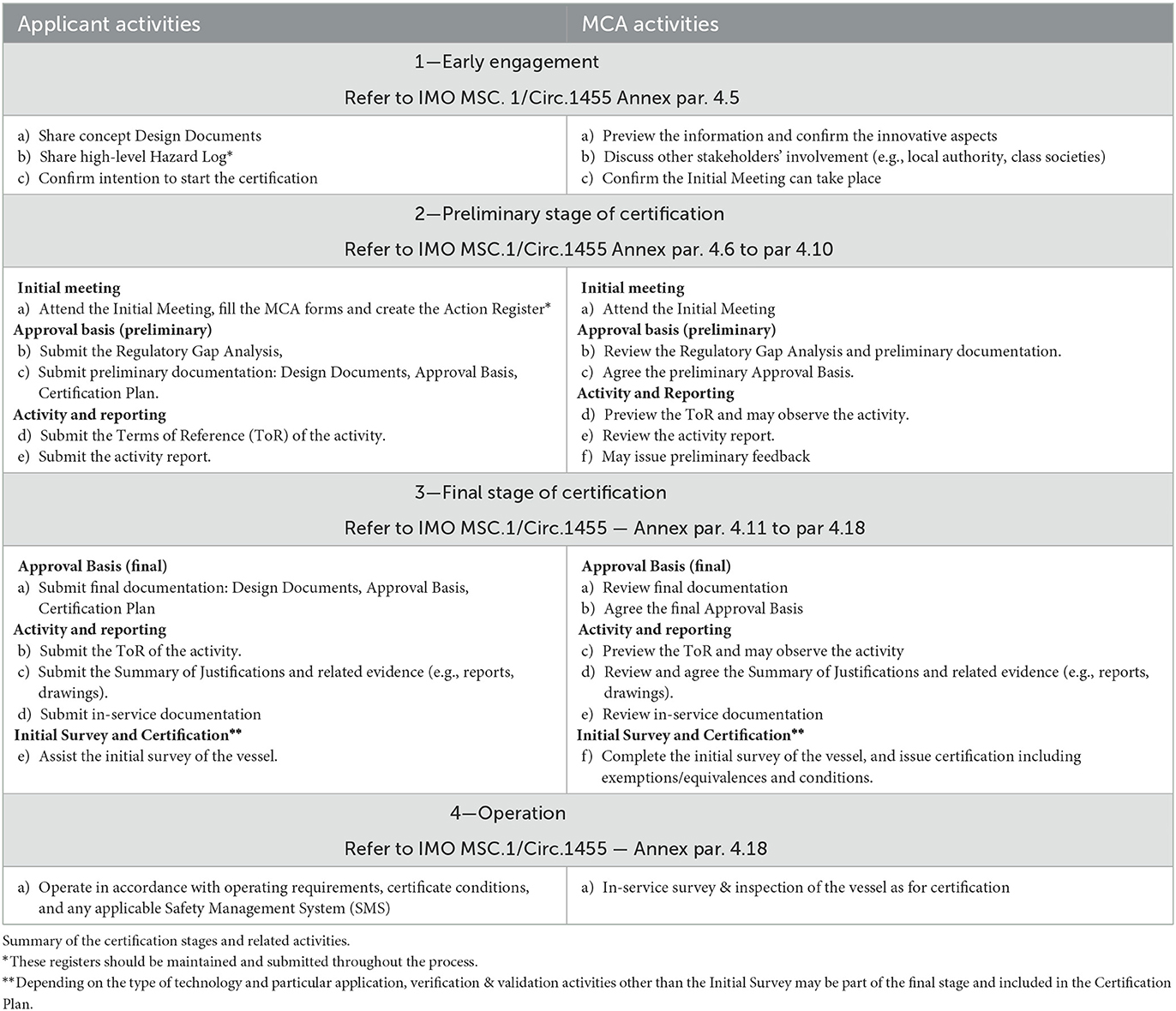
Table 1. Summary of process for obtaining certification for Innovative Technology under Marine Guidance Note (MGN) 664 published by UK Maritime and Coastguard Agency (MCA, 2022a).
In the framework of the preceding discussion and the ongoing debate surrounding the deployment and use of autonomous ships, one could highlight a couple of notable features of the MGN 664 process. In particular, the guidance strongly recommends that autonomous ship designers engage with the MCA at an early stage in the design lifecycle, otherwise they increase the risk of rejection (1.1) and the guidance is intended to support or supplement existing maritime certification processes rather than replacing them (2.2). Focusing on safety and security issues it clearly identifies them as top priorities and retains the power to inspect already certified vessels and if they do not comply or there is reason to believe they are “dangerously unsafe,” even detain them (4.3). It also clarifies that safety, environmental and security risks have to be managed according to its requirements (6.1), including cyber-security (B2.3). Finally, the requirement for the applicant to complete a “Regulatory Gap Analysis” which outlines regulatory requirements that are “challenged” by the innovative technology and regulatory gaps where the innovative tech's contributions to safety, environmental or security risks “are not addressed by the existing requirements” demonstrates the testing and pioneering nature of the guidance which aims to draw and learn from this preliminary implementation and improve as it progresses alongside the technology development. Overall, MGN 664 can be seen as an iterative and consultative process, almost in “partnership” with the MCA from the very beginning of the ship design, trying to fill gaps and ensure safe operation with a step-by-step process. It is an involved, detailed process which requires applicants to divulge a significant amount of information about their design—whether applicants have concerns about confidentiality of intellectual property is uncertain, but here is where the discussed balance between safety and innovation has to be achieved between all parties involved.
There are opportunities in the process, such as for example in the Regulatory Gap Analysis mentioned earlier, where applicants can highlight areas of existing regulation that are outdated or should not apply to their vessel design—for example a requirement that vessels have guardrails to protect humans from falling overboard may not have application to a vessel which is never intended to have humans on board. However, this raises the potentially thorny issue of: to what extent designers of uncrewed vessels must anticipate that humans will interact with their vessels at sea—whether law enforcement officials wishing to board and inspect, or civilians in emergency situations seeking assistance. This is a question of real practical and ethical significance that requires a policy response, which brings us also back to the question of the definition of ships and e.g., the requirement of autonomous vessels to comply with Conventions such as SOLAS and the principles (ethical and operational) of Search and Rescue at Sea. Unfortunately there will be no easy answers, as they will depend on the many different circumstances involved, such as the size of the vessel, its functions and purpose, where it will operate and so on. Autonomous vessels vary from very small research “gliders” to large container ships, to submarines. It is probably impossible to devise one rule which will apply equally to them all, which is fully aligned with this paper's approach and recommendation on the status of autonomous vessels as ships and the respective definition (see section 3), hence at this stage the MCA's preference for a “tailor-made” consultative approach. However, in future, more concrete, public bureaucratic processes will be needed as the tech becomes more pervasive. Hence the call for input to the Draft Workboat Code Edition 3.
4.2. Workboat code edition 3—Call for input
In October 2022, the MCA opened a consultation process for a “new statutory instrument (SI) and accompanying Code of Practice” the “Workboat Code Edition 3” (hereinafter “the Draft Code”) intended to provide “a single point of reference for all the mandatory requirements and guidance concerning workboats, including remotely operated unmanned vessels (ROUVs) operating as workboats, and pilot boats, all of which are <24 m load line length.” A 287-page draft version of the code is available online as well as a form for submitting comments. The scheduled timeframe covers the consultation, analysis of received responses, revisions and scrutiny of the proposed regulations before publication and entry into force of Workboat Code Edition 3 in spring 2023.
Apart from providing yet another acronym with which to refer to uncrewed vessels (ROUV), and a gender-biased one at that given its use of “unmanned” (Fenton and Chapsos, 2022), the open consultation is a chance for industry, academia, and the general public to give input into how workboats, and in particular remotely operated uncrewed workboats should be regulated on a more standardized basis. It aims to “clarify, and give legal certainty to, the certification process” and “reduce the amount of time required to assess certification applications” (MCA, 2022b).
It can be noted that the Draft Code will have clear parameters insofar as its reference to “remotely operated” vessels shifts its focus away from autonomous vessels, to those that will be operated from Remote Operation Centers (ROCs). However, it does anticipate vessels with “a level of autonomy different to that of Remotely Operated Unmanned Vessels” which may be considered on a “case-by-case basis by the administration.” Given the potential future widespread adoption of autonomous tech in ships, this is an area that should surely receive more attention than one short paragraph which delegates the question to a case-by-case consideration. The Draft Code will also only apply to workboats defined as being below 24 meters load line length, not used for pleasure, sport or recreation (1.2), and does not apply to submarines (1.9). The Draft Code therefore applies to “all dedicated pilot boats” (1.1) and any other boats meeting the criteria with no more than 12 passengers including industrial personnel (1.1) “when they are in commercial use.” The reference to “when in commercial use” seems to disapply it to vessels in experimental or testing phases, although this is not specified.
The Draft Code also has extra-territorial effect as it “applies to United Kingdom (UK) vessels wherever they may be, and to non-United Kingdom workboats in UK waters that operate from UK ports” (1.1). While the latter is clear in the sense that foreign workboats operating from UK ports could apply for certification and be subject to the discussed code, it is not clear how and why foreign countries where UK vessels may be would accept and enforce the regulation developed and implemented by the UK's MCA. It's also not clear if the terms UK and non-UK vessels imply that workboats will be flying state flags (hence registered as ships) or not and how their nationality will be checked.
A section with specific application to ROUVs is contained in a 28-page Annex 2 at the end of the Draft Code. It begins by disapplying a number of requirements of the Workboat Code relating to, among other things: (1.2). Stability, Life Saving Appliances, Fire Appliances for accommodation spaces and for use by crew, Accommodation and Recreational facilities, Protection of Personnel and Medical Care. That is, the requirements of the code that are directed at the needs of human crews.
It continues by setting out, in some detail, specific rules and requirements for ROUVs a number of which will be summarized here with some commentary. ROUVs shall not carry passengers, personnel, dangerous goods or operate as a mother ship. The last is an interesting restriction given that China is specifically developing autonomous mother-ships that carry up to 50 smaller autonomous craft (Saballa, 2022). ROCs are required to retain location and camera and sensor data from the ROUV for at least 2 years (2.2.3). A significant focus of the draft section is to safeguard against failure of critical systems and communications from the ROC to the ROUV. A number of articles set out the requirements for back-up systems including: back up power for up to a minimum of 3 h for critical systems (8.5.2), a secondary communications system (4.2.4), even a secondary Remote Operation Center (7.7.7).
The ROUV must respond to distress calls from other vessels (4.3.2) be able to mark the location of the emergency, and be equipped with a loudspeaker to “provide auditory updates to persons in distress” (4.3.3). Carrying further lifesaving devices such as flotation devices or liferafts would be on a voluntary basis (4.3.5), hence it's debatable whether the “auditory updates” would be effective, efficient and sufficient services to offer if the ROUV responds to distress calls from other vessels.
The concept of equivalence is employed with regard to the situational awareness of the ROC operators which requires the installation of “sensors (e.g., radar, AIS, microphone, vibration) and cameras (e.g., normal, low-light, infrared) installed which provide an equivalent standard of meeting visibility and watchkeeping requirements compared to a manned vessel” (5.2.1). Interestingly though, current IMO regulation requires “AIS to be fitted aboard all ships of 300 gross tonnage and upwards engaged on international voyages, cargo ships of 500 gross tonnage and upwards not engaged on international voyages and all passenger ships irrespective of size.” Clearly, the ROUV workboats don't fall under any of these categories, hence it would be interesting to follow the implementation of the sensor requirement rule and/or the future of the current IMO regulation on AIS at international level.
An issue which is frequently expressed with regard to un-crewed ships, particularly from experienced seafarers familiar with the operational demands of ships at sea, is: what happens when the ship inevitably breaks down or requires mechanical attention, if there is no one on board to fix or maintain it? The Annex attempts to address this concern by requiring that a ROUV “shall be able to complete its entire voyage (or legs between ports) without requiring routine maintenance, and this shall be demonstrated to the satisfaction of the Certifying Authority” (6.2.1). The draft also sets out that ROUVs “shall be maintained either out of the water, or whilst the vessel is alongside in port” (6.2.3). This accounts for foreseeable maintenance tasks but does not address unforeseen problems which will inevitably occur. Cases where the ROUV must be maintained at sea “in motion” will require special approval of the administration given on a case-by-case basis, and require special training and safeguards in place, such as suitable buoyancy, safety equipment such as guardrails and handrails (6.3.1). A vessel which does not meet those requirements must only be maintained out of water, be able to be recovered from the water without any personnel on board, and may only be boarded at sea in “extreme circumstances (such as to prevent risk to human life)” (6.3.3) This seems like a fair compromise between the requirements of boarding vessels at sea, and designers who object to installing human safety features on vessels that, in their opinion, should never have humans on board.
Some requirements may be seen as placing a heavy burden on operators for example: 7.2.1 which requires multiple personnel on standby, 7.2.6 which mandates that remote operators must only manage one ROUV at a time, and 7.7.7 requires a “back-up Remote Operation Center” to be available. This will eliminate some of the cost efficiencies envisaged by owners who would desire operators to manage multiple ships at one time.
The draft makes several references to a ROUV entering a “safe state” of operations in any unforeseen events such as loss of data connection, communication, latency, loss of propulsion or steering, etc. The draft does not define what a “safe state” requires rather stating that it should be “appropriate to the intended conditions of operation (e.g., initiating dynamic positioning and shutting down non-essential systems, reducing speed or emitting audio and visual warnings to other water users)” the goal here clearly being to prevent or minimize any possibility of collision or damage to persons or property at sea. It can be noted here that in the opinion of one interviewee “most un-crewed vessels, commercial or military are designed to automatically wipe all their data and scuttle the vessel in the event that any unauthorized person attempts to seize and/or open and access the vessel's data” (Interview with representative from autonomous vessel manufacturer MSubs, 2022). Doing so prevents data and intellectual property falling into enemy, or competitor, hands—while this may be a practical measure for vessels containing sensitive or proprietary data, it does not represent any official policy or legal position.
Section 8.1 specifically addresses cyber security in some detail requiring the designation of responsible personnel in the event of attack, training, contingency plan, recovery plan, record keeping, and annual internal audits (“strongly recommended”). ROUVs must also comply with cybersecurity measures applicable to crewed vessels set out in 31.3 of the Draft Code.
4.3. Maritime UK—Voluntary industry code of practice
Maritime UK, the “umbrella body for the maritime sector” brought together around 50 participants from government (MCA, MOD), NGOs (CMI), industry (MSubs, L3Harris) and Academia (Plymouth, Southampton) and others, to create a voluntary code to “observe a general obligation to display responsible and ethical behavior in relation to the design, manufacture, distribution, operation, maintenance and final disposal of their systems” (UKMIA, 2022). Noting that the maritime sector “makes a greater contribution to the UK economy than both rail and air combined” the report seeks to cement the UK's position as a global leader in “cutting-edge technology, high-quality design and manufacturing.” A 140-page document divided into two parts—Part 1 MASS Industry Conduct Principles and Part 2—UK Code of Practice. It seeks to “provide practical guidance for the design, construction and safe operation of autonomous and semi-autonomous MASS, primarily less than 24m, while the more detailed regulatory framework for MASS is developed under the Merchant Shipping Act 1995” with the primary aim of establishing standards and best practice.
The code acknowledges the ongoing work of the IMO with an “intent to ensure equivalence with the provisions of IMO's current legal instruments (COLREGS, SOLAS, MARPOL, and STCW) and to provide links to related documentation (e.g., ISPS, IMDG, ISM, Fire Safety Code and the Load Line Convention).” The Code also aligns with other relevant documents, for example the Lloyds Register Crewless Marine Systems Code and the European Defense Agency-sponsored SARUMS Best Practice Guide for Crewless Maritime Systems (1.9). Interestingly, the Code underlines the importance of complying with general marine safety regulations such as those that relate to lights, shapes (8.3) and collision avoidance “the COLREGs” (9.15) and skills and competencies for operators (13.2) where, in general, the ability or performance of MASS should be equivalent or better than that in crewed vessels. This approach, is fully aligned with this paper's suggestions in Section 3 regarding the imperative integration of autonomous vessels in international regulations and instruments such as e.g., the COLREGS to prioritize safety of navigation without acting as a barrier to innovative and new technologies.
The code also considers areas of concern for industry, such as for example health and safety, environmental issues, as well as an extensive cyber safety and security analysis, outlining the background of cybersecurity and the more serious forms of cyber-attack that could potentially be used against ships.
This Code, as its title indicates, is voluntary, which essentially means that is not part of the existing regulatory framework in the UK. However, as an official from the UK Maritime and Coastguard Agency put it in interview, “… it is an ‘industry best practice': ‘[…] what has been useful is that essentially it's been an opportunity to bring industry together for them to share their thoughts and ideas and for them to start working in this sort of collaborative way that's really needed in the industry” [Interview with representative from Maritime Coastguard Agency (MCA), 2022].
4.4. Liability, insurance and the vehicle technology and aviation bill
Much academic commentary has raised the question of liability in the area of autonomous vessels (Taeihagh and Lim, 2019; Soyer, 2020; Surian, 2020; Ringbom et al., 2021; Soyer and Tettenborn, 2021). Under common law systems, fault is a critical legal question when apportioning blame and damages for injury or loss. Driverless vehicles raise the crucial question of who would be liable in cases where a vehicle wrongfully causes loss of life, injury or damages where it is difficult to determine who, if anyone, was at fault for the collision or accident.
A bill before the UK Parliament (2021) at the time of writing attempts to clarify the situation with regard to insurance liability and sets out that:
2 Liability of insurers etc where accident caused by automated vehicle
(1) Where—
(a) an accident is caused by an automated vehicle when driving itself,
(b) the vehicle is insured at the time of the accident, and
(c) an insured person or any other person suffers damage as a result of the accident, the insurer is liable for that damage.
That is, in cases where the vehicle in question is insured, the insurer is liable to pay for the damage. However, it goes on to stipulate [art 5(3)] that where another party can be proven to be at fault (for example the software developer) and the insurer is able to seek compensation from that third party, any excess claimed and received from such a process must be payed to the injured person.
Article 2 states that where the vehicle is not insured, the owner of the vehicle will be liable. The concept of contributory negligence applies, i.e., that if a person has contributed to the accident/damage the fault can be apportioned accordingly. The classic example of this is a person's failure to wear a seatbelt, thus contributing to their injury even though they didn't cause the accident. In the context of autonomous vehicles, this can specifically include a person's failure to update the latest version of software [art 4(1)].
Under the proposed law the Secretary of State would be required to keep a list of “automated vehicles”:
(1) The Secretary of State must prepare, and keep up to date, a list of all motor vehicles that—
(a) are or might be used on roads or in other public places in Great Britain, and
(b) are in the Secretary of State's opinion designed or adapted to be capable, in at least some circumstances or situations, of safely driving themselves without having to be monitored by an individual (emphasis added).
While the bill is clearly primarily directed at autonomous road vehicles, assuming that “other public places” includes the internal or territorial waters, there would appear to be nothing in the definition of automated vehicle that would exclude autonomous ships. In the event that it cannot apply to MASS for any reason, the same principle of clarifying liability where a MASS is insured could be applied in a specific piece of legislation or amendment to a relevant law. In this way the law of liability with regard to MASS could be significantly clarified.
5. Conclusion—Is this the type of approach needed?
The UK has demonstrated a pro-active approach to engaging with and regulating innovative technologies in shipping (including this new form of autonomous and remote technology) that has the capacity to revolutionize operations in the maritime/shipping sector. The UK, through the MCA has established (a) that remotely controlled and autonomous vessels are a priority area (b) a process for certifying their operation in collaboration with industry and (c) issues surrounding insurance of automated vehicles. Some of the developing certification processes and insurance legislation may be regarded as onerous by manufacturers and developers. However, it is likely as the technology becomes more tested, established, recognized and trusted, these processes will become more standardized and streamlined.
The UK has also been a pioneer in trialing the first un-crewed vessel crossing the channel—one of the busiest shipping lanes in the world—from the UK to Belgium (Nautilus, 2019), signaling the potential of those vessels for international shipping. However, the existing gap in international shipping regulation to accommodate such innovation and the difficulty the international community is facing in terms of catching up with the evolution of technology, means that the UK had to rely on bilateral negotiations with Belgium in order for the vessel to be allowed in its territorial waters and port. As an MCA official put it at interview, “[…] until there are international regulations it's relying on domestic members of different countries to develop their own domestic regulations for these things. And it is then up to them as to how they deal with these vessels, whether they allow them in and what expectations they will put on them” [Interview with representative from Maritime Coastguard Agency (MCA), 2022].
Yet, as the preceding discussion suggests, if this technology is to fulfill its potential, and the international shipping integrates un-crewed vessels—whether fully autonomous or remotely controlled—the international maritime community needs to demonstrate resilience. It is imperative that essential conventions and legal instruments need to be updated to the modern reality and for this to happen, key stakeholders need to reach consensus and agree on the way forward. This is fully in line with the UK Maritime 2050 strategy, which aspires for the UK to lead the efforts to establish an international regulatory framework for autonomous vessels (UK Department for Transport, 2019) as discussed in detail in Section 4.
And this is also where the IMO's leading, protagonist's role can make a difference. The debate over the legal status of un-crewed ships and whether they can be regarded as “ships” under UNCLOS will likely continue. As one of this research participants and expert in the area stated, “[…] I'm not sure that the IMO can mandate and tell countries they have to accept them (MASS in their territorial waters) but what the IMO is able to do is actually put in place mandatory regulations or mandatory code requirements for these ships” [Interview with representative from Maritime Coastguard Agency (MCA), 2022]. Such IMO guidance (the MASS code) is already a work in progress, but needs to get up to speed and go beyond scoping and guidance into a form of standardization and mandatory nature. In this framework, IMO member states' developed regulation and best practice, like the UK's approach analyzed as part of this paper, and others' actively developing un-crewed maritime technology (such as for example Norway, Israel, the US, and China) can inform the process and set the basis for the development of future customary international law and norms.
Furthermore, additional research will be needed to examine how other states, particularly those that straddle important international shipping lanes—such as Egypt, Iran, and Indonesia to name a few—are approaching the issue with autonomous and un-crewed ships and incorporating them into their national legislation, and foreign policy stances, if at all, as this will also impact the development of customary international law and norms.
Data availability statement
The datasets presented in this article are not readily available due to conditions of existing Ethics approval ensuring anonymity of research participants and confidentiality of their contributions. Requests to access the datasets should be directed to the corresponding author.
Ethics statement
The studies involving human participants were reviewed and approved by Coventry University. The patients/participants provided their written informed consent to participate in this study.
Author contributions
Study conception and design and data collection: AF. Analysis and interpretation of results and draft manuscript preparation: AF and IC. Both authors reviewed the results and approved the final version of the manuscript.
Funding
This project has received funding from the European Union's Horizon 2020 research and innovation programme under the Marie Sklodowska-Curie (MSCA) grant agreement No. 101029232.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1. ^The gender neutral term “uncrewed” is preferred in this article over the gender-biased “unmanned”, except where it is embedded in terminology from other sources.
2. ^In fact as some astute authors have pointed out uncrewed vessels have been a reality for some time: “military unmanned vehicles have their origins back in 200BC” (Daum, 2018). HI Sutton has also documented the startling range of uncrewed underwater and surface vessels used in naval operations going back to at least the First World War (Sutton, 2017). Allen notes “a small-scale UMV appeared as early as 1892” demonstrated by Nicola Tesla in New York's Madison Square Garden (Allen, 2018).
3. ^UMV stands for Unmanned Maritime Vehicle.
4. ^ILOS stands for “International Law of the Sea.”
5. ^See IMO (2019) Convention on the International Regulations for Preventing Collisions at Sea (1972) (COLREGs) (online). Available online at: https://www.imo.org/en/About/Conventions/Pages/COLREG.aspx (accessed December 14, 2022).
6. ^The MCA is an executive agency, sponsored by the UK Department of Transport. See online https://www.gov.uk/government/organisations/maritime-and-coastguard-agency (accessed February 28, 2023).
References
AJOT (2017). Cyber penetration tests underscore maritime industry's nightmare security scenario. American Journal of Transportation. (2017). Available online at: https://ajot.com/news/cyber-penetration-tests-underscore-maritime-industrys-nightmare-security-sc (accessed May 9, 2023).
Allen, C. H. (2012). The Seabots are coming here: should they be treated as ‘vessels'? J. Navig. 65, 749—52. doi: 10.1017/S0373463312000197
Allen, C. H. (2018). Determining the legal status of unmanned maritime vehicles: formalism vs. functionalism. J. Maritime Law Comm. 49, 477—514. doi: 10.2139/ssrn.3244172
Allianz (2019). Shipping safety - Human error comes in many forms | AGCS. Expert Risk Articl. Available online at: https://www.agcs.allianz.com/news-and-insights/expert-risk-articles/human-error-shipping-safety.html (accessed May 9, 2023).
Amos, J. (2022). Tonga Eruption: Robot Boat to Map Explosive Volcano's Aftermath. BBC News. Available online at: https://www.bbc.co.uk/news/science-environment-60946084
cbinAskari, H. R., and Hossain, M. N. (2022). Towards utilizing autonomous ships: a viable advance in industry 4.0. J. Int. Maritime Saf. Environ. Aff. Shipp. 6, 39—49. doi: 10.1080/25725084.2021.1982637
Baughen, S. (2021). “Who is the Master Now? Regulatory contractual challenges of unmanned vessels,” in eds B. Soyer, A. Tettenborn. New Technologies, Artificial Intelligence and Shipping Law in the 21st Century. Taylor and Francis.
CBInsights (2018). Massive Cargo Ships Are Going Autonomous. Here Are The Companies and Trends Driving The Global Maritime Industry Forward. cbinsights. Available online at: https://www.cbinsights.com/research/autonomous-shipping-trends (accessed August 28, 2018).
Chircop, A. (2018). Testing international legal regimes: the advent of automated commercial vessels. Ger. Yearbook nt. Law 2017, 60. doi: 10.3790/gyil.60.1.109
Daum, O. (2018). The implications of international law on unmanned naval craft. J. Maritime Law Comm. 49, 71—103.
Dean, P., and Clack, H. (2020). “Autonomous shipping and maritime law,” in New Technologies, Artificial Intelligence and Shipping Law in the 21st Century. eds B. T. Soyer, (Andrew New York: Informa Law from Routledge). p. 67-89. doi: 10.4324/9780429029172-6
Executive, M. (2022). Mayflower Autonomous Ship Completes Historic Atlantic Crossing. The Maritime Executive. Available online at: https://maritime-executive.com/article/mayflower-autonomous-ship-completes-historic-atlantic-crossing (accessed May 9, 2023).
Fenton, A. J., and Chapsos, I. (2022). Are autonomous ships and vehicles ‘unmanned' or ‘uncrewed'? C4ISRNET. Available online at: https://www.c4isrnet.com/unmanned/2022/09/08/are-autonomous-ships-and-vehicles-unamanned-or-uncrewed/ (accessed September 9, 2022).
Fuentes, G. (2022). New Navy Unmanned Command Will Send 4 Experimental Large USVs to RIMPAC—USNI News. USNI News. Available online at: https://news.usni.org/2022/05/17/new-navy-unmanned-command-will-send-4-experimental-large-usvs-to-rimpac (accessed May 17, 2022).
Gambrell, J. (2022). Iran briefly seizes 2 US Navy sea drones in Red Sea amid tensions. Defense News. 2022. Available online at: https://www.defensenews.com/flashpoints/2022/09/02/iran-briefly-seizes-2-us-navy-sea-drones-in-red-sea-amid-tensions/ (accessed September 2, 2022).
Gauci, G. M. (2016). Is it a vessel, a ship or a boat, is it just a craft, or is it merely a contrivance? J. Maritime Law Comm. 47, 479—99.
Ghaderi, H. (2019). Autonomous technologies in short sea shipping: trends, feasibility and implications. Transport Rev. 39, 152—73. doi: 10.1080/01441647.2018.1502834
Hound, N. (2019). New workboat code edition 2 is published by MCA—The International Institute of Marine Surveying (IIMS). International Institute of Marine Surveying. Available online at: https://www.iims.org.uk/new-workboat-code-edition-2-is-published-by-mca (accessed September 9, 2022).
Howell, E. (2021). Elon Musk unveils SpaceX's newest drone ship for rocket landings at sea. Spacecom. Available online at: https://www.space.com/spacex-drone-ship-a-shortfall-of-gravitas (accessed July 12, 2022).
ICS (2022). Shipping and world trade: driving prosperity: International Chamber of Shipping. Available online at: https://www.ics-shipping.org/shipping-fact/shipping-and-world-trade-driving-prosperity/ (accessed May 9, 2023).
IMarEST (2017). Technology in Shipping: The Impact of Technological Change on the Shipping Industry. Institute of Marine Engineering, Science and Technology. Available online at: https://www.imarest.org/policy-news/thought-leadership/1010-technology-in-shipping/file
IMO (2021a). Outcome of the regulatory Scoping Exercise for the use of Maritime Autonomous Surface Ships (MASS) MSC Circular 1638.London: International Maritime Organization. 3 June 2021.
IMO (2021b). Outcome of the regulatory Scoping Exercise for the use of Maritime Autonomous Surface Ships (MASS) LEG Circular 11. International Maritime Organization. (2021), 15. December 2021. Contract No.: LEG.1/Circ.11.
IMO (2022a). Interview with Technical Officer Subdivision for Marine Technology and Cargoes International Maritime Organization (opinions are those of the interviewee only and do not represent the position of IMO).
IMO (2022b). Legal Committee, 109th session, (LEG 109). Available online at: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/LEG-109th-session.aspx (accessed March 25, 2022).
IMO (2023). Autonomous shipping. Available online at: https://www.imo.org/en/MediaCentre/HotTopics/Pages/Autonomous-shipping.aspx (accessed May 9, 2023).
Interview with representative from autonomous vessel manufacturer MSubs (2022). (accessed September 5, 2022).
Interview with representative from Maritime and Coastguard Agency (MCA) (2022). Maritime Autonomy Policy Lead UK Technical Services Ship Standards.
Kardakova, M., Shipunov, I., Nyrkov, A., and Knysh, T. editors. (2020). Cyber Security on Sea Transport. International Scientific Conference Energy Management of Municipal Facilities and Sustainable Energy Technologies EMMFT 2018. Cham: Springer International Publishing. doi: 10.1007/978-3-030-19756-8_46
Kessler, G. C., and Shepard, S. D. (2022). Maritime Cybersecurity: A Guide for Leaders and Managers Second Edition ed. Kessler & Shepard.
Klein, N., Guilfoyle, D., Karim, S., and McLaughlin, R. (2020). Maritime autonomous vehicles: new frontiers in the law of the sea. international and comparative law. Quarterly 69, 719—734. doi: 10.1017/S0020589320000226
Koushan, K. (2018). Ship Design Aspects of Unmanned and Autonomous Vessels. SINTEF. Available online at: https://www.sintef.no/globalassets/sintef-ocean/pdf/smm/ship-design-aspects-of-unmanned-and-autonomous-vessels-koushan050918.pdf
Larter, D. B. (2021). Unclear on unmanned: The US Navy's plans for robot ships are on the rocks. Defense News. Available online at: https://www.defensenews.com/digital-show-dailies/surface-navy-association/2021/01/10/unclear-on-unmanned-the-us-navys-plans-for-robot-ships-are-on-the-rocks/ (accessed January 12, 2022).
Lohn, A. (2020). Hacking AI - Center for Security and Emerging Technology. Center for Security and Emerging Technology.
Longo, G., Martelli, M., Russo, E., and Zaccone, R. (2022). “Collision-avoidance capabilities reduction after a cyber-attack to the navigation sensors,” in Proceedings of the International Ship Control Systems Symposium (Institute of Marine Engineering, Science and Technology IMarEST). doi: 10.24868/10729
Madricardo, F., Ghezzo, M., Nesto, N., Mc Kiver, W. J., Faussone, G. C., Fiorin, R., et al. (2020). How to deal with seafloor marine litter: an overview of the state-of-the-art and future perspectives. Front. Marine Sci. (2020) 7, 5134. doi: 10.3389/fmars.2020.505134
MCA (2022a). Marine Guidance Note MGN 664 (M+F) Certification Process for Vessels Using Innovative Technology. UK: Maritime and Coastguard Agency.
MCA (2022b). Open Consultation: Consultation Document. In: Agency MC, editor. UK: Maritime and Coastguard Agency.
McKenzie, S. (2020). When is a Ship a Ship? Use by State Armed Forces of Un-crewed Maritime Vehicles and the United Nations Convention on the Law of the Sea. University of Queensland. doi: 10.31228/osf.io/a7xtc
Mehta, R., Winter, S. R., Rice, S., and Edwards, M. (2021). Are passengers willing to ride on autonomous cruise-ships? Maritime Transport Res. 2, 100014. doi: 10.1016/j.martra.2021.100014
MOD (2022). Ministry of Defence—Written evidence (UNC0018) UK2022. Available online at: https://committees.parliament.uk/writtenevidence/40830/pdf/ (accessed May 9, 2023).
Nautilus (2019). First unmanned cargo vessel negotiates the English Channel. Available online at: https://www.nautilusint.org/en/news-insight/news/first-unmanned-cargo-vessel-negotiates-the-english-channel/ (accessed May 9, 2023).
O'Brien, C. (2018). Key advantages and disadvantages of ship autonomy - SAFETY4SEA. Safety4Sea. Available online at: https://safety4sea.com/key-advantages-and-disadvantages-of-ship-autonomy/ (accessed September 21, 2022).
O'Rourke, R. (2022). Navy Large Unmanned Surface and Undersea Vehicles: Background and Issues for Congress. Congressional Research Service. (accessed October 18, 2022).
Petrig, A. (2021). “Autonomous offender ships and international maritime security law,” in Autonomous Ships and the Law. IMLI Studies in International Maritime Law. Eds Ringbom H, Røsæg E, Solvang T. (Oxon: Routledge). doi: 10.4324/9781003056560-5
Resolution, M. S. C. (2017). Maritime cyber risk management in safety management. Systems. 428, 214.
RINA (2017). Crew-free and connected. Ship and Boat International: eNews November/December 2017. Available online at: https://www.rina.org.uk/crewfree.html (accessed May 9, 2023).
Ringbom, H., Røsæg, E., and Solvang, T. editors. (2021). Autonomous Ships and the Law. Oxon: Routledge. (2021).
Rocks, W. (2022). Red Sea Drones: Countering Houthi Maritime Tactics. Dryad Global. Available online at: https://channel16.dryadglobal.com/red-sea-drones-countering-houthi-maritime-tactics (accessed May 9, 2023).
Saballa, J. (2022). China Unveils “Mothership” to Launch Drone Swarms. The Defense Post. Available online at: https://www.thedefensepost.com/2022/05/31/china-mothership-drone-swarms/ (accessed May 31, 2022).
Soyer, B. (2020). Autonomous Vessels and Third-Party Liabilities: the Elephant in the Room. New Technologies, Artifical Intelligence and Shipping Law in the 21st Century. New York: Informa Law from Routledge. (2020), 105—15. doi: 10.4324/9780429029172-8
Soyer, B. (2021). “The Future of Autonomous Shipping; The Regulatory Challenge,” in Artificial Intelligence and Autonomous Shipping: Developing the International Legal Framework, eds Soyer, B., Tettenborn, A. 1 ed. Oxford: Hart Publishing. p. 163-84. doi: 10.5040/9781509933389.ch-008
Soyer, B., and Tettenborn, A. editors. (2021). Artificial Intelligence and Autonomous Shipping: Developing the International Legal Framework. 1 ed. Oxford: Hart Publishing. doi: 10.5040/9781509933389
Suri, M. (2020). Autonomous vessels as ships—the definition conundrum. IOP Conference Series: Materials Science and Engineering. 929(1). doi: 10.1088/1757-899X/929/1/012005
Surian, I. A. (2020). “Legal Analysis of the Collision and Strict Liability Framework for the Shipowner of Unmanned and Autonomous Vessels (South Africa),” in The 1st International Conference on Maritime Education and Development,eds Bauk S, Ilčev SD. (Durban). doi: 10.1007/978-3-030-64088-0_10
Sutton, H. I. (2017). A brief history of Explosive Boats. Covert Shores. Available online at: http://www.hisutton.com/Explosive_boats.html
Sutton, H. I. (2019). Otranto: unmanned-drug-vessel. Covert Shores. 2019. Available online at: http://www.hisutton.com/Otranto_unmanned-drug-vessel.html (accessed May 9, 2023).
Taeihagh, A., and Lim, H. S. M. (2019). Governing autonomous vehicles: emerging responses for safety, liability, privacy, cybersecurity, and industry risks. Transport Rev. 39, 103—28. doi: 10.1080/01441647.2018.1494640
Tam, K., and Jones, K. editors. (2018a). Cyber-Risk Assessment for Autonomous Ships. IEEE. doi: 10.1109/CyberSecPODS.2018.8560690
Tam, K., and Jones, K. D. (2018b). Maritime cybersecurity policy: the scope and impact of evolving technology on international shipping. Journal of Cyber Policy. 3, 147—64. doi: 10.1080/23738871.2018.1513053
The International Convention for the Prevention of Pollution from Ships. (1973). (accessed October 2, 1983).
Title 1 US Code US Congress CHAPTER 1 (2022). Rules of Construction. Available online at: https://uscode.house.gov/view.xhtml?path=/prelim@title1/chapter1&edition=prelim
UK Department for Transport. (2019). Maritime 2050: Navigating the Future. UK Department for Transport, London, United Kingdom.
UK National Cyber Strategy (2022). Pioneering a Cyber Future with the Whole of the UK. In: Government H, editor.
UK Parliament. (2021). Vehicle Technology and Aviation Bill. Available online at: https://bills.parliament.uk/bills/1960 (accessed May 9, 2023).
UKMIA (2022). Being a Responsible Industry Maritime Autonomous Ship Systems (MASS) UK Industry Conduct Principles and Code of Practice. Maritime UK. Available online at: https://www.maritimeuk.org/priorities/innovation/maritime-uk-autonomous-systems-regulatory-working-group/mass-uk-industry-conduct-principles-and-code-practice-2021-v5/
UKRN (2021). Royal Navy launches missile from autonomous vessel in NATO exercise. Royal Navy News. Available online at: https://www.royalnavy.mod.uk/news-and-latest-activity/news/2021/october/14/211014-madfox-at-nato-exercise (accessed May 7, 2022).
UKRN (2022). New autonomous vessel delivered to Royal Navy. Royal Navy News. Available online at: https://www.royalnavy.mod.uk/news-and-latest-activity/news/2021/march/26/210326-madfox-vessel (accessed May 7, 2022).
UN Convention on the Law of the Sea. (1982). Available online at: https://www.imo.org/en/ourwork/legal/pages/unitednationsconventiononthelawofthesea.aspx (accessed November 14, 2022).
USCG (2022). Proceedings of the Marine Safety & Security Council: Uncharted Waters: Navigating the integration of autonomous vessels. Washington D.C.: United States Coast Guard.
Veal, R., Tsimplis, M., and Serdy, A. (2019). The Legal Status and Operation of Unmanned Maritime Vehicles. Ocean Development and International Law. 50, 23—48. doi: 10.1080/00908320.2018.1502500
Verma, P. (2022). The military wants ‘robot ships' to replace sailors in battle. The Washington Post. Available online at: https://www.washingtonpost.com/technology/2022/04/14/navy-robot-ships/ (accessed April 14, 2022).
Woodie, A. (2020). Hacking AI: Exposing Vulnerabilities in Machine Learning. datanami. Available online at: https://www.datanami.com/2020/07/28/hacking-ai-exposing-vulnerabilities-in-machine-learning/ (accessed July 28, 2022).
Yara (2021). Yara Birkeland | Yara International. News and Media. Available online at: https://www.yara.com/news-and-media/press-kits/yara-birkeland-press-kit/ (accessed November 12, 2022).
Yara (2022). Crown Prince and youths christen world's first emission-free container ship | Yara International. Yaracom. Available online at: https://www.yara.com/corporate-releases/crown-prince-and-youths-christen-worlds-first-emission-free-container-ship/ (accessed April 29, 2022).
Keywords: marine technology, maritime security, autonomous ships, international law, maritime cybersecurity
Citation: Fenton AJ and Chapsos I (2023) Ships without crews: IMO and UK responses to cybersecurity, technology, law and regulation of maritime autonomous surface ships (MASS). Front. Comput. Sci. 5:1151188. doi: 10.3389/fcomp.2023.1151188
Received: 25 January 2023; Accepted: 02 May 2023;
Published: 24 May 2023.
Edited by:
A. J. Uhlmann, NHL Stenden University of Applied Sciences, NetherlandsReviewed by:
Ørnulf Jan Rødseth, SINTEF Ocean, NorwayAdam Turner, Macquarie University, Australia
Dimitrios Dalaklis, World Maritime University, Sweden
Copyright © 2023 Fenton and Chapsos. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Adam James Fenton, YWQ4OTM4QGNvdmVudHJ5LmFjLnVr