 Sieglinde Bogaert
Sieglinde Bogaert Jesse Davis
Jesse Davis Benedicte Vanwanseele
Benedicte Vanwanseele- 1Human Movements Biomechanics Research Group, Department of Movement Sciences, KU Leuven, Leuven, Belgium
- 2Department of Computer Science, Leuven.AI, KU Leuven, Leuven, Belgium
Running poses a high risk of developing running-related injuries (RRIs). The majority of RRIs are the result of an imbalance between cumulative musculoskeletal load and load capacity. A general estimate of whole-body biomechanical load can be inferred from ground reaction forces (GRFs). Unfortunately, GRFs typically can only be measured in a controlled environment, which hinders its wider applicability. The advent of portable sensors has enabled training machine-learned models that are able to monitor GRF characteristics associated with RRIs in a broader range of contexts. Our study presents and evaluates a machine-learning method to predict the contact time, active peak, impact peak, and impulse of the vertical GRF during running from three-dimensional sacral acceleration. The developed models for predicting active peak, impact peak, impulse, and contact time demonstrated a root-mean-squared error of 0.080 body weight (BW), 0.198 BW, 0.0073 BW
1 Introduction
Recreational distance running is a popular form of physical activity that offers numerous health benefits ranging from improvements in mental health (Oswald et al., 2020) to a lower risk of all-cause or cardiovascular mortality (Lee et al., 2017; Schnohr et al., 2013; Lavie et al., 2015). However, running also creates the risk of developing running-related injuries (RRIs) such as medial tibial stress syndrome, Iliotibial band syndrome, and Achilles tendinopathy, among others (Lopes et al., 2012). The incidence of RRIs in novice and recreational runners are 17.8 and 7.7 per 1,000 h of running respectively (Videbæk et al., 2015). About 75%–80% of RRIs are overuse injuries (Hespanhol Junior et al., 2017; Walther et al., 2005), which are a consequence of an imbalance between the cumulative musculoskeletal loading load and the runners’ load capacity (Bertelsen et al., 2017). Therefore, monitoring the musculoskeletal load during running is essential to prevent RRIs (Johnson et al., 2020).
A surrogate for the musculoskeletal load is the whole-body biomechanical load, which can be extrapolated from ground reaction forces (GRFs). The vertical GRF (vGRF) force-time curve exhibits characteristics linked to the risk of running-related injuries, which we will examine. In rearfoot-strike runners, the vertical GRF (vGRF) force-time curve displays an impact peak within the first 10% of the stance phase, followed by a larger active peak around halfway through the stance phase. Higher active peaks have been associated with an increased risk of RRIs, for example, a stress fracture (Popp et al., 2017; Grimston et al., 1991; Kliethermes et al., 2021), patellofemoral pain (Messier et al., 1991), and ankle instability (Bigouette et al., 2016). While some studies (Messier et al., 2018; Bredeweg et al., 2013; Davis et al., 2016) observed no differences in the impact peak between injured and non-injured runners, undergoing a gait-retraining program targeting the reduction of the impact peak (Chan et al., 2018) has shown to reduce a runner’s chance of sustaining an injury. The differences in ground contact time among injured and non-injured male novice runners (Bredeweg et al., 2013) and the association between vGRF impulse and bone stress injuries (Kliethermes et al., 2021), further indicate the importance of vGRF characteristics in assessing the risk of RRIs. Despite these results, inconsistencies persist in the relationship between vGRF characteristics and RRIs. One contributing factor may be that these studies only capture a snapshot of the load during running in a controlled environment. A more comprehensive understanding of the relationship between load throughout the training program and the development of RRIs requires incorporating load measures in real-life settings.
The conventional method for measuring GRFs during running relies on an expensive instrumented treadmill installed in a laboratory setting. While this method is accurate (Kram et al., 1998), it is impractical for real-world environments. In contrast, inertial measurement units (IMUs) consisting of an accelerometer, a gyroscope, and a magnetometer, facilitate monitoring runners in their natural environment. IMUs have already shown their potential in estimating runners’ fatigue status (Op De Beéck et al., 2018), gait kinematics (Wouda et al., 2018), and injury status (Bogaert et al., 2022). IMUs can also be used to indirectly estimate GRFs with studies proposing approaches for the impact peak, active peak, loading rate, and impulse of the vGRF (Verheul et al., 2019; Alcantara et al., 2021; Wouda et al., 2018; Seeley et al., 2020). One approach estimates these characteristics using an alternative expression of Newton’s second law, where the vGRF is approximated from the sum of the product of the masses and the acceleration of body segments (Verheul et al., 2019). Including more segments increases this approach’s accuracy but comes with added financial expenditures, logistical complexities, and discomfort. An alternative to the physics-based approach in a single-IMU setting is to use machine learning to predict the characteristics of the vGRF (Alcantara et al., 2021; Wouda et al., 2018; Donahue and Hahn, 2023).
While the machine-learning approaches are appealing, they still have several shortcomings. First, while they may be more accurate than the physics-based approach in a single-IMU setting, they do not reach the level of performance required for all applications. For example, detecting changes in vGRF active and impact peaks attributed to chronic ankle instability requires an accuracy of 0.095 body weight (BW) and 0.18 BW respectively, which these models do not achieve (Bigouette et al., 2016). Second, they focus on domain-specific (e.g., acceleration-based-estimated active peak, step frequency, and speed) and subject-specific (e.g., body mass) features, ignoring automatically-extracted features, which have proven to improve performance (Bogaert et al., 2022). Third, previous studies focused on a narrowly defined population of elite athletes (Alcantara et al., 2021; Verheul et al., 2019; Komaris et al., 2019). Hence, it is unclear if these approaches are applicable to the broader population. Finally, previous studies have not compared the developed approaches on the same dataset. This raises concerns about the reliability of the comparisons because the considered dataset can have a large effect on the findings.
This study aims to develop a new machine-learning approach that results in more accurate predictions of vGRF characteristics—active peak, impact peak, impulse of stance phase, and contact time—during running and tackles the abovementioned shortcomings. In addition, we will compare this method with existing methods on the same dataset.
2 Methods
2.1 Participants
Forty-three subjects, 31 males and 12 females, with varying running experience and sports engagement participated in the study. The social and societal ethics committee at the KU Leuven approved this study (G-2022-5367-R4) and every participant signed an informed consent.
2.2 Data collection
Every participant walked and ran on a treadmill for 11 min to warm up and familiarize with running on a treadmill. Afterward, the subject ran in random order at 2.22 m/s, 2.50 m/s, 2.78 m/s, 3.33 m/s, self-reported preferred speed for a 5,000 m run, preferred speed–0.14 m/s, and preferred speed +0.14 m/s. The subjects skipped any speeds they were uncomfortable with and did not repeat any speeds.
The Xsens link system (Xsens Technologies, Movella; Enschede, the Netherlands) collected 3D acceleration at 240 Hz and was secured using straps, a closely-fitted T-shirt, and a belt over the L3 to L5 spinal segments for the pelvis sensor. An instrumented treadmill (Motek, Motek Medical B.V.; Houten, the Netherlands) captured ground reaction forces at a sampling rate of 1,200 Hz (or 1,000 Hz for one subject). We synchronized the vertical ground reaction force and acceleration data using a marker positioned on or next to the pelvis sensor monitored by a 3D motion capture system (Vicon Motion Systems; Los Angeles, United States) at a sampling rate of 120 Hz (or 100 Hz for one subject).
2.3 Data preprocessing
Following the exclusion of data-corrupted trials, the dataset comprises 234 trials across 43 subjects. The ground reaction force of the remaining trials was filtered using a fifth-order Butterworth low-pass filter with a 30 Hz cutoff frequency and normalized to the participant’s body weight. We identified steps by localizing where the vGRF intersects the 50 N threshold (Vanwanseele et al., 2020). For each detected step, we calculated the ground truth value of the active peak, impact peak, impulse of the stance phase, and contact time. The acceleration signals were filtered with a fifth-order Butterworth low-pass filter with a cutoff value of 60 Hz. The detection of initial contact and the toe-off event was based on the acceleration signal crossing the threshold of 0.18 g (with g = 9.81 m/s2) and −0.25 g along with a set of constraints concerning the expected increase after initial contact and decrease before initial contact and toe-off event. When no toe-off event was found for a detected step, the threshold of −0.25 g was increased. Acceleration-detected steps that could not be matched to a corresponding GRF-detected step, steps with a stance phase longer than 0.4 s or shorter than 0.167 s, or for which there was suspicion of data corruption (e.g., signal falling away) were omitted. Overall, we obtained 92,974 steps of which 38,245 had an impact peak.
2.4 Feature extraction and model
For each step, we calculated a set of features, which can be divided into three categories:
Subject-specific features include mass and leg length (based on the distance from the hip to the ground during standing).
General time-series features are constructed using the TSFresh package (Christ et al., 2018). The Supplementary Material shows the considered features.
Domain-specific time-series features include step frequency, impulse of vertical acceleration data during the stance phase, and impulse of the entire step of the vertical acceleration data.
We eliminated features with a missing value or that always take on the same value. Categorical features are one-hot encoded and numerical features are standardized within a cross-validation approach. Next, we used a Lasso (Least Absolute Shrinkage and Selection Operator) model to predict the vGRF characteristics with a regularization strength between
Including running speed as an input feature allows the model to account for the variations tied to changes in speed, particularly if running speed is relevant to the prediction task. However, to also account for the limited availability of accurate running speed outside a controlled environment, we trained the models with and without speed as an input parameter.
2.5 Method comparison
We compared our proposed approach to Verheul et al. (2019)’s method for predicting the impact peak, and Alcantara et al. (2021)’s approach for predicting the active peak, impulse, and contact time. Finally, we considered the mean regressor, a model that always predicts the mean value of the target variable as computed on the training data.
In Alcantara et al. (2021)’s method, active peak, contact time, impulse, and step frequency are derived from the estimated vGRF, calculated by the product of sacral acceleration and body mass. These acceleration-derived characteristics serve, along with body mass and speed, as input for a linear regression model or a quantile regression forest. Given the original paper’s results favoring linear regression over a quantile regression forest, we chose the linear regression model for implementing the Alcantara et al. (2021)’s method. Alcantara et al. (2021)’s method used, just like our method, 3D acceleration data collected from a sacral IMU.
In Verheul et al. (2019)’s method, a linear regression model utilizes the impact peak of the curve derived from the sum of the product of segments’ mass and acceleration to estimate the impact peak of the vGRF. To ensure a fair comparison with our method, we used for Verheul et al. (2019)’s method the 3D acceleration from a single position. Specifically, we selected the 3D trunk center of mass (CoM) acceleration data, the optimal segment for their single-segment model. The trunk’s CoM acceleration was approximated by linearly interpolating between the acceleration at the base of the neck and the base of the L5 disc which could, in principle, be captured by a single accelerometer. We used anatomical data to determine the position of the mass and CoM of the trunk (Plagenhoef et al., 1983). Verheul et al. (2019) used marker trajectories to derive the acceleration of the CoM of different segments. However, we adapted this to using acceleration measured by IMUs.
2.6 Model training and evaluation
We partitioned the data into a train and test set on subject level. There were 36 subjects in the train set and seven subjects in the test set. To select the hyperparameter settings and the set of features, we conducted a leave-one-subject-out cross-validation on the train set. Finally, the trained model was evaluated on the test dataset. All models were assessed using the root-mean-square error (RMSE) to quantify the difference between the predicted and observed values. In addition, we reported the mean-absolute-percentage error (MAPE) and the determination coefficient
We executed all data processing, model training, and model evaluation in Python 3.10.9, except for the Alcantara et al. (2021)’s model, which was trained and evaluated using R 4.2.2.
3 Results
3.1 Participants
Table 1 summarizes the descriptive characteristics of the 43 participants. The participants’ ages ranged between 19 and 58 years, and their sports participation level varied from no sport to running more than 100 km a week.
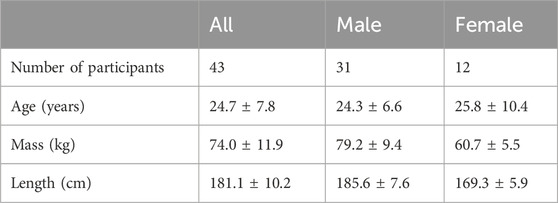
Table 1. Descriptive characteristics of all participants included in the analysis. Values of continuous variables are expressed as mean
3.2 Model performance
Across all steps of all participants, the mean
Table 2 shows the performance of the vGRF characteristics prediction models. For each model, the validation score, used for hyperparameter tuning, and test score, used for model evaluation, are reported. For each characteristic, four different models are compared: (1) and (2) our method with and without speed as an input parameter, (3) the comparison method, and (4) a mean regressor. Our impulse-prediction model uses automatic-extracted features from the entire step, while our other models employ automatic-extracted features from the stance phase–a decision guided by validation scores.
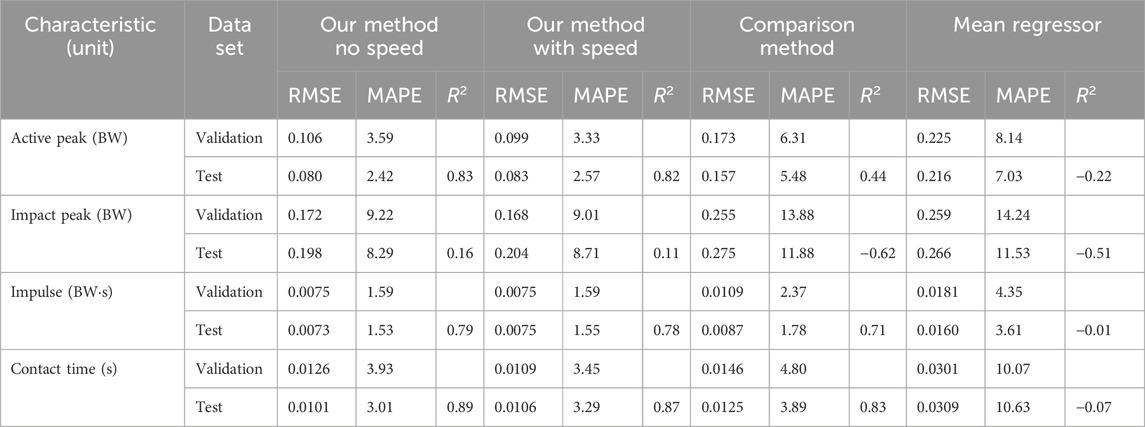
Table 2. Root-mean-square error (RMSE), mean-absolute-percentage error (MAPE) and determination coefficient
Overall, the results of Table 2 indicate that our models performed better than the corresponding comparison method from the literature and the baseline (i.e., the mean regressor). Including speed in the feature set of our model did not improve the performance of the models.
Table 3 presents the performance of our model (without speed as an input), trained on data of different running speeds, but evaluated on subsets of the test set according to speed. The performance of the models, evaluated by RMSE, generally declines as speed increases, except for the contact-time model. A minor dip in RMSE is observed at 2.50 m/s for the active peak.
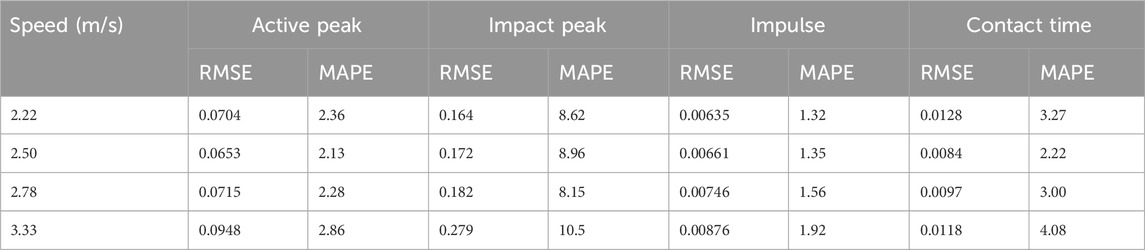
Table 3. Performance of our model (without speed as input) on speed-grouped subsets of the test set. Abbreviations: Root-mean-square error (RMSE) and mean-absolute-percentage error (MAPE).
4 Discussion
We developed models to predict the active peak, impact peak, impulse, and contact time during running from 3D acceleration collected by a sacral-mounted IMU. Our models performed better than the corresponding comparison method from the literature and the baseline (i.e., the mean regressor).
Our no-speed model for predicting the active peak of the vGRF obtained an RMSE of 0.080 BW and a MAPE of 2.42%, indicating that, on average, the model’s predictions were 2.42% off from the actual active-peak values. The RMSE score corresponds to an improvement of 0.077 BW compared to the Alcantara et al. (2021)’s model and 0.136 BW with respect to the mean regressor. The improvement in the coefficient of determination further underscores the enhanced performance of our model compared to the Alcantara et al. (2021)’s and baseline model. Similarly, our model’s contact time prediction accuracy, measured by RMSE, was 0.0024 s better than the Alcantara et al. (2021)’s method. For the impulse, our and Alcantara et al. (2021)’s model can accurately predict the impulse, yet our model has reduced the RMSE by 0.0014 BW
Regarding contact time, Alcantara et al. (2021)’s method applied to our dataset yielded RMSE, MAPE, and
We compare our model for estimating the impact peak with the single-IMU version of Verheul et al. (2019)’s method. As the reasoning behind the Verheul et al. (2019)’s model is based on the use of acceleration data of multiple segments, it has a relatively high RMSE for a single-IMU setting. Our model outperforms Verheul et al. (2019)’s approach and the mean regressor yielding an improvement in the RMSE of 0.077 BW and 0.068 BW respectively. The low determination coefficient for the impact-peak models and the high MAPE indicate the low quality of the prediction. This highlights that more research is needed to find a more suitable set of features and models for predicting the impact peak of the vGRF.
Since our models and the comparison models are trained and evaluated on the same dataset, differences in performance are not attributed to the dataset itself but rather to factors such as feature selection and model architecture. For all four vGRF characteristics, the superior performance of our method over the baseline model underscores the informativeness of the features in capturing deviations from the average.
Literature indicates that, in general, as running speed increases, contact time decreases. Concurrently, there is an increase in active peak, impact peak, and impulse (Nilsson and Thorstensson, 1989). Consequently, we expected that speed would be a valuable feature for predicting all characteristics. However, including speed in the feature set of our model to predict these characteristics didn’t have a large influence. A possible explanation for why including speed did not improve the predictions for the active peak, impact peak, impulse, and contact time models is that speed is potentially correlated with another considered feature based on the accelerometer signal. In addition, adjustments in running style in response to increased speed can vary on an individual level. Some runners might increase their stride length, others their stride frequency, which also has variable effects on the vGRF, complicating the relationship between speed and vGRF. Considering these outcomes alongside the general lack of readily available accurate speed information, incorporating speed into the model does not seem to be crucial for predicting vGRF characteristics.
The model’s evaluation on speed-grouped subsets of the test set (see Table 3) shows that the performance of the model for active peak, impact peak, and impulse decreases slightly with increasing speed. Apart from minor fluctuations, similar trends were seen for active peak (Donahue and Hahn, 2023; Patoz et al., 2022; Komaris et al., 2019) and impulse (Donahue and Hahn, 2023) in earlier studies. For the contact time, the model performs best at the intermediate speed, similar to the trend observed in a study by Patoz et al. (2022). Despite the observed trends, the variations are minimal and our models perform robustly across the speeds (except the impact-peak model for 3.33 m/s). This highlights the potential usefulness in a variety of practical applications.
The suitability of a model for a given application depends on achieving the required accuracy of that application. We evaluated our active- and impact-peak models for the ability to detect changes in active peak and impact peak due to chronic ankle instability, aiming for an RMSE of 0.095 BW for active peak and 0.18 BW for impact peak, based on half of the reported differences of 0.19 BW and 0.36 BW respectively (Bigouette et al., 2016). Our method meets the accuracy requirement for predicting the active peak, in contrast to the comparison method. However, for the impact peak, neither our nor the comparison method predicts the impact peak short with adequate accuracy, indicating the need for further improvement.
Regarding the impulse models, our and Alcantara et al. (2021)’s models are accurate enough to observe half of the difference in impulse after a 6-week forefoot strike intervention in runners with exertional compartment syndrome (Diebal et al., 2012).
For contact time, the practical threshold is 0.01 s, based on half the difference in contact time between the 40th and eighth kilometer of a marathon (Chan-Roper et al., 2012). Our no-speed model has a performance close enough (RMSE of 0.0101 s) to be considered acceptable for this practical application. In the Supplementary Material, the results and thresholds are visualized for all four vGRF characteristics.
Besides the Alcantara et al. (2021)’s and Verheul et al. (2019)’s methods, several other studies have investigated predicting characteristics of the vGRF. One study by Patoz et al. (2023) estimated active peak and contact time from running speed, body mass, stride frequency, and acceleration-based estimates using a machine-learning model. Their best-performing models achieved an RMSE of 0.12 BW and 11.9 ms for active peak and contact time, respectively, which is worse compared to our models. Some other studies have estimated these metrics by approximating the vGRF waveform and calculating the metric from this curve (Donahue and Hahn, 2023; Komaris et al., 2019; Patoz et al., 2022), considered using multiple sensors (Donahue and Hahn, 2023), or the acceleration signal from positions other than the sacrum (Komaris et al., 2019). However, they generally reported higher RMSEs than we achieved. Nevertheless, as every study possesses a unique dataset and often uses a different evaluation metric, it remains hard to directly compare the reported performance without implementing the methods on the same dataset.
The age, running experience, and sports participation varied across the participants. Nevertheless, the older population was underrepresented which might still limit the generalizability of our findings. Furthermore, all running took place on a level treadmill with speeds from 2.22 to 3.89 m/s. As a result, our models might have difficulties in generalizing to different populations, speeds, slopes, or undergrounds. Future studies should investigate the current model’s generalizability to these different conditions. A possible challenge is that vGRF measurements typically require force plates, making it difficult to assess vGRF across varied running surfaces. Moreover, recruiting a diverse participant pool could also be challenging. Investigating the model’s generalizability could be a first step towards adopting the models in the field. A second step requires integrating the models is wearable devices or apps to allow real-time monitoring of the vGRF characteristics in a user-friendly way.
5 Conclusion
In this study, we demonstrate that Lasso models can predict vertical ground reaction force (vGRF) characteristics during running from 3D acceleration data collected by a sacral IMU. Our proposed method outperformed the mean-prediction baseline and two established methods for predicting the contact time, active peak, impact peak, and impulse. Overall, our findings indicate the potential utility of this approach as a valuable tool for monitoring select factors related to running-related injuries. Nonetheless, there is a need for further research, mainly toward the accurate prediction of impact peak, and to assess the generalizability to different running conditions.
Data availability statement
The datasets presented in this article are not readily available because of ethical and privacy concerns regarding the participants. Requests to access the datasets should be directed to the corresponding author and the Social and Societal Ethics Committee at KU Leuven.
Ethics statement
The studies involving humans were approved by the Social and Societal Ethics Committee at the KU Leuven. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study.
Author contributions
SB: Conceptualization, Data curation, Formal Analysis, Funding acquisition, Investigation, Methodology, Project administration, Software, Validation, Visualization, Writing–original draft, Writing–review and editing. JD: Conceptualization, Formal Analysis, Funding acquisition, Methodology, Project administration, Resources, Supervision, Validation, Writing–review and editing. BV: Conceptualization, Formal Analysis, Funding acquisition, Methodology, Project administration, Resources, Supervision, Validation, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This research was funded by Research Council KU Leuven (C3/20/125), and the Flemish Agency for Scientific Research (FWO-Vlaanderen) through a research fellowship to SB (11Q3024N).
Acknowledgments
We gratefully acknowledge the support of Dan Catelli, Lander Vermeulen, Matthias Gombeer, and Jorre Dierckens during the measurements, and extend our gratitude to all participants of this study. JD is partially supported by the Flemish Government under the “Onderzoeksprogramma Artificiële Intelligentie (AI) Vlaanderen” programme.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fbioe.2024.1440033/full#supplementary-material
References
Alcantara, R. S., Day, E. M., Hahn, M. E., and Grabowski, A. M. (2021). Sacral acceleration can predict whole-body kinetics and stride kinematics across running speeds. PeerJ 9, e11199. doi:10.7717/peerj.11199
Bertelsen, M., Hulme, A., Petersen, J., Brund, R. K., Sørensen, H., Finch, C., et al. (2017). A framework for the etiology of running-related injuries. Scand. J. Med. and Sci. sports 27, 1170–1180. doi:10.1111/sms.12883
Bigouette, J., Simon, J., Liu, K., and Docherty, C. L. (2016). Altered vertical ground reaction forces in participants with chronic ankle instability while running. J. Athl. Train. 51, 682–687. doi:10.4085/1062-6050-51.11.11
Bogaert, S., Davis, J., Van Rossom, S., and Vanwanseele, B. (2022). Impact of gender and feature set on machine-learning-based prediction of lower-limb overuse injuries using a single trunk-mounted accelerometer. Sensors 22, 2860. doi:10.3390/s22082860
Bredeweg, S. W., Kluitenberg, B., Bessem, B., and Buist, I. (2013). Differences in kinetic variables between injured and noninjured novice runners: a prospective cohort study. J. Sci. Med. Sport 16, 205–210. doi:10.1016/j.jsams.2012.08.002
Chan, Z. Y., Zhang, J. H., Au, I. P., An, W. W., Shum, G. L., Ng, G. Y., et al. (2018). Gait retraining for the reduction of injury occurrence in novice distance runners: 1-year follow-up of a randomized controlled trial. Am. J. sports Med. 46, 388–395. doi:10.1177/0363546517736277
Chan-Roper, M., Hunter, I., Myrer, J. W., Eggett, D. L., and Seeley, M. K. (2012). Kinematic changes during a marathon for fast and slow runners. J. sports Sci. and Med. 11, 77–82.
Christ, M., Braun, N., Neuffer, J., and Kempa-Liehr, A. W. (2018). Time series feature extraction on basis of scalable hypothesis tests (tsfresh–a python package). Neurocomputing 307, 72–77. doi:10.1016/j.neucom.2018.03.067
Davis, I. S., Bowser, B. J., and Mullineaux, D. R. (2016). Greater vertical impact loading in female runners with medically diagnosed injuries: a prospective investigation. Br. J. sports Med. 50, 887–892. doi:10.1136/bjsports-2015-094579
Diebal, A. R., Gregory, R., Alitz, C., and Gerber, J. P. (2012). Forefoot running improves pain and disability associated with chronic exertional compartment syndrome. Am. J. sports Med. 40, 1060–1067. doi:10.1177/0363546512439182
Donahue, S. R., and Hahn, M. E. (2023). Estimation of gait events and kinetic waveforms with wearable sensors and machine learning when running in an unconstrained environment. Sci. Rep. 13, 2339. doi:10.1038/s41598-023-29314-4
Grimston, S. K., Engsberg, J. R., Kloiber, R., and Hanley, D. A. (1991). Bone mass, external loads, and stress fracture in female runners. J. Appl. Biomechanics 7, 293–302. doi:10.1123/ijsb.7.3.293
Hespanhol Junior, L. C., Van Mechelen, W., and Verhagen, E. (2017). Health and economic burden of running-related injuries in Dutch trailrunners: a prospective cohort study. Sports Med. 47, 367–377. doi:10.1007/s40279-016-0551-8
Johnson, C. D., Tenforde, A. S., Outerleys, J., Reilly, J., and Davis, I. S. (2020). Impact-related ground reaction forces are more strongly associated with some running injuries than others. Am. J. sports Med. 48, 3072–3080. doi:10.1177/0363546520950731
Kliethermes, S. A., Stiffler-Joachim, M. R., Wille, C. M., Sanfilippo, J. L., Zavala, P., and Heiderscheit, B. C. (2021). Lower step rate is associated with a higher risk of bone stress injury: a prospective study of collegiate cross country runners. Br. J. sports Med. 55, 851–856. doi:10.1136/bjsports-2020-103833
Komaris, D.-S., Pérez-Valero, E., Jordan, L., Barton, J., Hennessy, L., O’Flynn, B., et al. (2019). Predicting three-dimensional ground reaction forces in running by using artificial neural networks and lower body kinematics. IEEE Access 7, 156779–156786. doi:10.1109/access.2019.2949699
Kram, R., Griffin, T. M., Donelan, J. M., and Chang, Y. H. (1998). Force treadmill for measuring vertical and horizontal ground reaction forces. J. Appl. physiology 85, 764–769. doi:10.1152/jappl.1998.85.2.764
Lavie, C. J., Lee, D.-c., Sui, X., Arena, R., O’Keefe, J. H., Church, T. S., et al. (2015). Effects of running on chronic diseases and cardiovascular and all-cause mortality. Mayo Clin. Proc. (Elsevier) 90, 1541–1552. doi:10.1016/j.mayocp.2015.08.001
Lee, D.-C., Brellenthin, A. G., Thompson, P. D., Sui, X., Lee, I.-M., and Lavie, C. J. (2017). Running as a key lifestyle medicine for longevity. Prog. Cardiovasc. Dis. 60, 45–55. doi:10.1016/j.pcad.2017.03.005
Lopes, A. D., Hespanhol, L. C., Yeung, S. S., and Costa, L. O. P. (2012). What are the main running-related musculoskeletal injuries?. Sports Med. 42, 891–905. doi:10.1007/BF03262301
Messier, S. P., Davis, S. E., Curl, W. W., Lowery, R. B., and Pack, R. J. (1991). Etiologic factors associated with patellofemoral pain in runners. Med. Sci. sports Exerc. 23, 1008–1015. doi:10.1249/00005768-199109000-00003
Messier, S. P., Martin, D. F., Mihalko, S. L., Ip, E., DeVita, P., Cannon, D. W., et al. (2018). A 2-year prospective cohort study of overuse running injuries: the runners and injury longitudinal study (trails). Am. J. sports Med. 46, 2211–2221. doi:10.1177/0363546518773755
Nilsson, J., and Thorstensson, A. (1989). Ground reaction forces at different speeds of human walking and running. Acta Physiol. Scand. 136, 217–227. doi:10.1111/j.1748-1716.1989.tb08655.x
Op De Beéck, T., Meert, W., Schütte, K., Vanwanseele, B., and Davis, J. (2018). “Fatigue prediction in outdoor runners via machine learning and sensor fusion,” in Proceedings of the 24th acm sigkdd international conference on knowledge discovery and data mining, 606–615.
Oswald, F., Campbell, J., Williamson, C., Richards, J., and Kelly, P. (2020). A scoping review of the relationship between running and mental health. Int. J. Environ. Res. public health 17, 8059. doi:10.3390/ijerph17218059
Patoz, A., Lussiana, T., Breine, B., Gindre, C., and Malatesta, D. (2022). A single sacral-mounted inertial measurement unit to estimate peak vertical ground reaction force, contact time, and flight time in running. Sensors 22, 784. doi:10.3390/s22030784
Patoz, A., Lussiana, T., Breine, B., Gindre, C., and Malatesta, D. (2023). Comparison of different machine learning models to enhance sacral acceleration-based estimations of running stride temporal variables and peak vertical ground reaction force. Sports Biomech., 1–17. doi:10.1080/14763141.2022.2159870
Plagenhoef, S., Evans, F. G., and Abdelnour, T. (1983). Anatomical data for analyzing human motion. Res. Q. Exerc. sport 54, 169–178. doi:10.1080/02701367.1983.10605290
Popp, K. L., McDermott, W., Hughes, J. M., Baxter, S. A., Stovitz, S. D., and Petit, M. A. (2017). Bone strength estimates relative to vertical ground reaction force discriminates women runners with stress fracture history. Bone 94, 22–28. doi:10.1016/j.bone.2016.10.006
Schnohr, P., Marott, J. L., Lange, P., and Jensen, G. B. (2013). Longevity in male and female joggers: the copenhagen city heart study. Am. J. Epidemiol. 177, 683–689. doi:10.1093/aje/kws301
Seeley, M. K., Evans-Pickett, A., Collins, G. Q., Tracy, J. B., Tuttle, N. J., Rosquist, P. G., et al. (2020). Predicting vertical ground reaction force during running using novel piezoresponsive sensors and accelerometry. J. Sports Sci. 38, 1844–1858. doi:10.1080/02640414.2020.1757361
Vanwanseele, B., Op De Beéck, T., Schütte, K., and Davis, J. (2020). Accelerometer based data can provide a better estimate of cumulative load during running compared to gps based parameters. Front. Sports Act. Living 2, 575596. doi:10.3389/fspor.2020.575596
Verheul, J., Gregson, W., Lisboa, P., Vanrenterghem, J., and Robinson, M. A. (2019). Whole-body biomechanical load in running-based sports: the validity of estimating ground reaction forces from segmental accelerations. J. Sci. Med. sport 22, 716–722. doi:10.1016/j.jsams.2018.12.007
Videbæk, S., Bueno, A. M., Nielsen, R. O., and Rasmussen, S. (2015). Incidence of running-related injuries per 1000 h of running in different types of runners: a systematic review and meta-analysis. Sports Med. 45, 1017–1026. doi:10.1007/s40279-015-0333-8
Walther, M., Reuter, I., Leonhard, T., and Engelhardt, M. (2005). Injuries and response to overload stress in running as a sport. Orthopade 34, 399–404. doi:10.1007/s00132-005-0790-0
Keywords: running, machine learning, vertical ground reaction force, inertial measurement unit, contact time, active peak, impact peak, impulse
Citation: Bogaert S, Davis J and Vanwanseele B (2024) Predicting vertical ground reaction force characteristics during running with machine learning. Front. Bioeng. Biotechnol. 12:1440033. doi: 10.3389/fbioe.2024.1440033
Received: 28 May 2024; Accepted: 20 September 2024;
Published: 08 October 2024.
Edited by:
Vincenzo Bonaiuto, University of Rome Tor Vergata, ItalyReviewed by:
Zixiang Gao, University of Calgary, CanadaAndrea Tigrini, Marche Polytechnic University, Italy
Copyright © 2024 Bogaert, Davis and Vanwanseele. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Sieglinde Bogaert, c2llZ2xpbmRlLmJvZ2FlcnRAa3VsZXV2ZW4uYmU=