 Takashi Ota
Takashi Ota Keigo Matsumoto
Keigo Matsumoto Kazuma Aoyama
Kazuma Aoyama Tomohiro Amemiya
Tomohiro Amemiya Takuji Narumi
Takuji Narumi Hideaki Kuzuoka
Hideaki Kuzuoka
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Virtual Real., 23 October 2024
Sec. Technologies for VR
Volume 5 - 2024 | https://doi.org/10.3389/frvir.2024.1456202
This study aimed to develop an effective VR locomotion technique for walking through virtual environments with sloped ground. Thus, this paper presents a novel method for inducing the sensation of walking on a slope in walking-in-place (WIP) using ankle tendon electrical stimulation (TES), which induces the body tilt sensation. We conducted two experiments to evaluate the effectiveness of the proposed method. In Experiment 1, we evaluated the sensation of ascending and descending slopes induced by the proposed method in a setup where electricity flows when the feet are grounded by comparing it to the sensation on a real slope. Experiment 1 demonstrated a marginally significant effect of electrical stimulation on the sensation of ascending or descending slopes. We attributed this to the short duration of ankle TES and the influence of the user’s interpretation of the ankle TES. Based on the findings, Experiment 2 was conducted in a setup where ankle TES was constantly applied. The results indicated that participants who focused on the subjective body tilt sensation elicited by TES and those unaware of the TES effect experienced an ascending sensation with an anterior ankle TES and a descending sensation with a posterior ankle TES. Conversely, those who focused on the tactile or force sensation induced by ankle TES experienced the opposite effect. Based on this finding, we have constructed an implementation guide for a WIP system that incorporates ankle TES to present the desired sensation of ascending or descending slopes in virtual environments.
Virtual reality (VR) applications often involve users moving through expansive virtual environments (VEs). To support mobility in such VEs, numerous techniques have been proposed (Boletsis, 2017; Cherni et al., 2020; Boletsis and Chasanidou, 2022). Among these techniques, body-centric methods, which shift a user’s viewpoint through actual or imitated walking movements, are the most effective in enhancing presence and minimizing VR sickness (Nilsson et al., 2018; Caserman et al., 2021). Body-centric techniques are classified into repositioning systems, redirection techniques, and proxy gestures (Nilsson et al., 2018). Repositioning systems involve using a treadmill or a similar device to achieve viewpoint movement while remaining in place within the tracking space. Redirection techniques, such as redirected walking (RDW) (Razzaque et al., 2001), allow users to walk in a VE larger than the tracking space by subtly manipulating their view and direction. Proxy gesture makes the user’s viewpoint to move forward according to the user’s gestures that replace walking, such as arm swinging and foot stepping. Walking-in-place (WIP), a type of proxy gesture, is considered the most promising VR locomotion method for consumer use, as it provides a natural walking sensation and can be realized in a minimal tracking space (Nilsson et al., 2016). WIP has achieved significant horizontal spatial extension. If the natural walking sensation can be maintained while enabling movement with a vertical change in viewpoint, it could enable locomotion in 3D-extended VEs, such as sloped ground. However, developing hardware that works well with WIP to produce the sensation of ascending and descending slopes has been challenging, resulting in few studies on this topic.
Based on the idea that people sense their body tilting when walking on slopes, we postulated that combining a body tilt sensation with a natural walking sensation could create the perception of ascending and descending a slope. To achieve this, we developed a new VR locomotion method that utilizes electrical stimulation on the ankle tendon during WIP, based on a previous study showing that ankle tendon electrical stimulation (TES) when standing can provide a subjective body tilt sensation (Takahashi et al., 2022).
We conducted two experiments to evaluate the effectiveness of the proposed method. Experiment 1 showed that the proposed method marginally enhanced the sensation of ascending or descending. However, problems with the duration of electrical stimulation and variance in interpretation of the sensations induced by the electrical stimulation became non-negligible when ankle TES was applied to WIP (foot-stepping condition). In Experiment 2, we observed that higher elevation sensations were produced with constant electrical stimulation. Furthermore, we developed an implementation guide to address the variance in interpretation of the sensations induced by electrical stimulation.
WIP is a VR locomotion technique in which the virtual viewpoint is moved based on the tracking information of users stepping on the spot. Since Slater et al. created a system that moved the viewpoint based on the head-mounted display (HMD) tracking information (Slater et al., 1995), various related methods have been proposed. Low-latency, Continuous-Motion WIP (LLCM-WIP) is one of the most straightforward solutions to provide smooth locomotion in VE (Feasel et al., 2008). Gait-Understanding-Driven WIP (GUD-WIP) achieves a more natural gait by matching the step frequency to the walking speed (Wendt et al., 2010). Speed-Amplitude-Supported WIP (SAS-WIP) is more efficient and faster than GUD-WIP when walking long distances while being more effective and precise over short distances (Bruno et al., 2013). Swing-in-Place (SIP) is a less fatiguing WIP gesture (Ang et al., 2019). Step-Height-and-Frequency WIP (SHeF-WIP) provides better advancement speed control by considering a second parameter, i.e., the step height and step frequency (Hirao et al., 2021). Hanson et al. (2019) utilized deep neural networks to create a more personalized WIP method. Hirao et al. (2024) introduced height-based control to increase movement speed in WIP. Furthermore, their study proposes a way to increase the accuracy of locomotion control and immersion during WIP by utilizing passive haptics with rubber bands or pseudo-haptics with visual feedback. Although their idea of providing sensory feedback to the body during WIP is similar to our study, they did not investigate the sensation of ascending and descending slopes.
Many VR locomotion systems have been developed to simulate vertical movement sensations, and they are mainly categorized into redirection-based approaches and actuator-based approaches. Among redirection-based approaches, Kobayashi et al. (2019) proposed a method to make steps seem higher than their actual height by shifting the viewpoint upward significantly when climbing steps in VR space. Seo and Kang (2021) proposed a method to present the sensation of climbing stairs through redirection that allows the user to generate a constant sensation of ascending and descending while in a flat real space. Ogawa et al. (2022) confirmed that redirection is also effective for jumping onto steps. Other studies achieved not only discrete ascent and descent of stairs but also continuous ascent and descent of slopes (Matsumoto et al., 2017; Shimamura et al., 2019). Additionally, Nagao et al. successfully generated the sensation of ascending or descending by applying passive haptics to the redirection method (Nagao et al., 2018) and created infinite stairs that enable users to climb stairs endlessly (Nagao et al., 2017). Similarly, Wang et al. (2021) applied passive haptics to generate the sensation of vertical movement.
Regarding the actuator-based approaches, the Gait Master is a system that can simulate the sensation of walking on uneven terrain by having the user ride on a board that is moved up and down by a large device (Iwata et al., 2001). The CirculaFloor system builds on the same concept but utilizes robot platform units that move in place beneath the user’s feet (Iwata et al., 2004). These robotic units can alter their height, allowing users to move horizontally and vertically. The Level-up is a wearable system that can produce a discontinuous difference in height, such as a staircase, by changing the height of the shoe using an actuator (Schmidt et al., 2015). Similarly, Yue et al. proposed the soft robotic smart shoe, which can recreate terrain with continuously changing elevation, such as slope, by adjusting the air pressure in the sole (Wang and Minor, 2018). Finally, the Elevate uses an array of pins that can adjust their height and has been suggested to replicate complex slope geometries (Je et al., 2021).
However, both the redirection-based and actuator-based approaches have certain limitations. Redirection-based approaches are limited in their effectiveness in presenting the sensation of ascending and descending slopes in isolation. As mentioned previously, most redirection-based methods employ haptic feedback methods called physical-props haptic feedback (Wee et al., 2021), which can not realize content that dynamically changes the horizontal mapping between the VE and the real space, as the sensation can only be generated at the location of the haptic device. On the other hand, the actuator-based approach requires using a large device to achieve the desired outcome. In contrast, electrical stimulation can respond to VEs that change arbitrarily with the computer-controlled electrical stimulator. Moreover, the electrical stimulator is very compact and easy to set up.
TES evokes a reflex known as the Golgi tendon reflex (Jami, 1992), which causes the tendons to elongate. This phenomenon has been applied in several studies. For example, Takahashi et al. investigated the characteristics of the electrical stimulation to the wrist extensor’s tendon and applied it to a force presentation system (Takahashi et al., 2016; 2018; 2019). Regarding ankle TES, Kaneko et al. (2018) proposed a system that generates a walking sensation using kinesthetic stimulation and ankle TES. In addition, Takahashi et al. (2022) confirmed that ankle TES induces a body tilt sensation. They reported the following findings: applying electrical stimulation to the posterior ankle tendon causes the center of pressure (CoP) to shift to the anterior side, generating the subjective sensation of body tilt to the anterior side. Conversely, applying electrical stimulation to the anterior ankle tendon causes the CoP to shift to the posterior side, generating the subjective sensation of body tilt to the posterior side.
The effect of ankle TES on the generation of body tilt sensation has been confirmed exclusively in a standing posture. Given that the mechanisms of human postural control differ between standing and walking (Winter, 1995), it is not obvious whether ankle TES can induce the sensation of body tilt during walking. However, we hypothesized that ankle TES might produce a subjective sensation of body tilt during stepping. Then, we postulated that applying ankle TES to WIP could enhance the sensation of ascending and descending.
This experiment aims to investigate the effect of ankle TES on the sensation of ascending and descending slopes in the WIP system. Participants were instructed to step in place while wearing an HMD. The experimental system includes a slope WIP, and as participants take steps in the real space during the trial, their viewpoints move along slopes in the VR space. Inspired by the fact that the ankle somatosensory perception of a person walking uphill or downhill is affected by the ground only while the foot is on the ground, ankle TES was applied only while the foot was on the ground in Experiment 1. Participants reported their sensations of ascending or descending slopes experienced during the trial, and the collected data was analyzed. The local ethics committee at our organization approved this experiment, and the protocol was implemented in accordance with the ethical standards outlined in the Declaration of Helsinki.
In this experiment, as depicted in Figure 1A, the participant wore an HMD (HTC Vive Pro Eye) with a
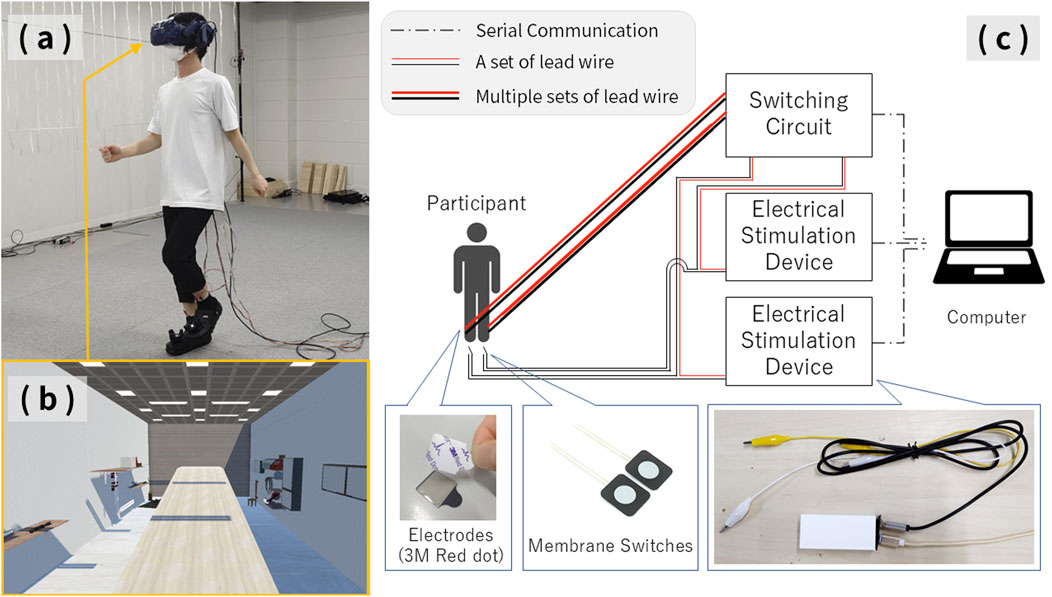
Figure 1. Experimental setup: (A) Experimental environment showing the participant taking steps. (B) A representative VR view of the experimental system, with the HMD displaying images of walking on an inclined platform in response to the tracker’s movements. (C) Wiring of the electrical stimulator with foot ground detection.
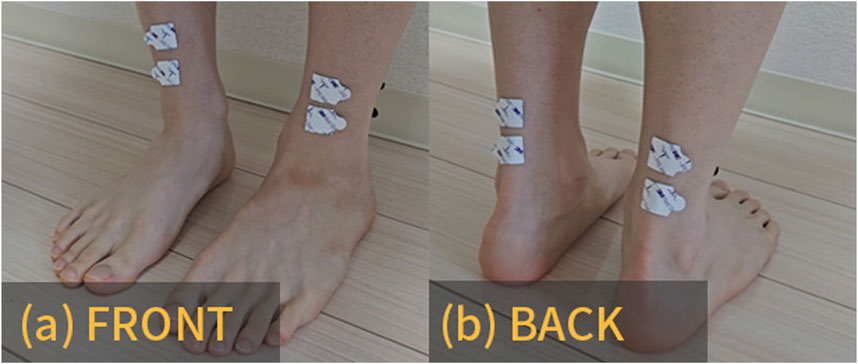
Figure 2. Electrode positions: In the FRONT condition, electrical stimulation was applied to electrodes placed on the tibialis anterior muscle tendon (A). In the BACK condition, electrical stimulation was applied to electrodes placed on the Achilles tendon (B). The previous study (Takahashi et al., 2022) reported that FRONT condition TES induces backward subjective body tilt sensation and body sway, while BACK condition TES induces forward subjective body tilt sensation and body sway.
The experiment aimed to investigate how participants’ sensation of ascending or descending slopes is affected by ankle TES. A total of 20 participants, consisting of 9 males and 11 females with a mean age of 24.5, were recruited through social media. As a reward for their participation, each participant received an Amazon gift card worth approximately 20 USD.
The experimental setup involved two primary variables: electrical stimulation and visual stimulation conditions. The electrical stimulation conditions consisted of three levels: FRONT, corresponding to the stimulation of the tibialis anterior muscle tendon, as illustrated in Figure 2A; BACK, corresponding to the stimulation of the Achilles tendon, as illustrated in Figure 2B; and NONE, corresponding to no electrical stimulation. The visual stimulation conditions included five levels: UP10 (10-degree uphill slope), UP5 (5-degree uphill slope), FLAT (0-degree flat surface), DOWN5 (5-degree downhill slope), and DOWN10 (10-degree downhill slope).
Participants completed the stepping tasks under various combinations of these conditions. After each trial, they reported the perceived angle of the ascending or descending slope using an adjustable-angle platform, as depicted in Figure 3. For data analysis, the average of the two tilt angles obtained for each condition within a participant was calculated and defined as the “adjusted tilt angle” for that condition.
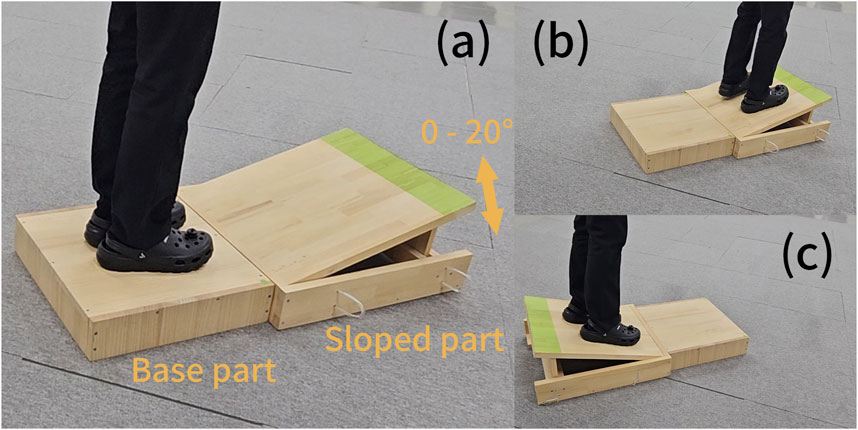
Figure 3. Adjustable-angle platform. (A) The angle can be changed every 1° from 0° to 20°. (B, C) Experimental participants can experience from −20° to 20° by changing the sloped part’s orientation and connecting it in front of or behind the base part.
This experimental design aimed to investigate the effect of ankle TES on the participant’s sensation of ascending or descending.
Before beginning the experiment, participants were fully informed about the process and signed a consent form. Next, they completed a general questionnaire covering their sex, age, height, and any visual impairments. Additionally, they filled out the Simulator Sickness Questionnaire (SSQ) (Kennedy et al., 1993).
After wiping the skin with an alcohol wipe, the electrodes were placed on the tibialis anterior muscle tendons and Achilles tendons. Next, the amplitude of the current wave of the TES was adjusted for each stimulation site. The amplitude of the current wave was gradually increased in steps of 0.5 mA from 0 mA until the participant reported any discomfort, such as a strong tactile sensation or vibration. Thereafter, the amplitude was reduced in steps of 0.1 mA until discomfort disappeared. The adjusted amplitude of the current was employed in the experiment.
Participant put on an HMD, footwear with trackers on the surface and membrane switches on the soles, and a belt with a tracker. As illustrated in Figure 1A, the cable was hooked to the belt when fastening the belt to make steps safer. Furthermore, the experimenter held the cable as required to prevent the participant from stepping on the cable during the experiment. Participants then practiced walking on a slope in the VE using the WIP system; the user-specific movement speed parameter was adjusted to a comfortable level for each participant.
Participant walked on slopes of varying degrees in the VE, depending on the visual condition, while ankle TES was applied in different stimulation sites depending on the electrical stimulation condition. As depicted in Figure 3, five visual conditions and three electrical stimulation conditions were set up, resulting in a total of 15 combined conditions. Each combination was performed twice, resulting in a total of 30 trials, with the task order randomized.
The foot-step task was performed as follows:
1. The participant performed the foot-step task for 12 s.
2. Upon completion, the screen went dark. Subsequently, the participant stepped onto the platform, whose angles could be changed (Figure 3).
3. The participant repeatedly responded to whether the sensation of ascending or descending experienced while stepping in the VE was steeper or gentler than the sensation presented by the platform. The angle was changed multiple times in accordance with the Parameter Estimation by Sequential Testing (PEST) rule (Taylor and Creelman, 1967), which is a method commonly used in psychophysical experiments to efficiently measure stimulus intensity. The details of the measurement based on the PEST rule in this study are as follows:
After completing all 30 trials, participants removed the experimental equipment. Then, the participant was instructed to fill out the SSQ and the Igroup Presence Questionnaire (IPQ) (igroup.org, 2001) and provide feedback about the experiment, including their opinions and impressions. Finally, they received their reward and signed the receipt.
Out of the 20 participants, one female participant discontinued the experiment due to discomfort from the VR experience. Data could not be collected from one male participant due to equipment malfunction. Therefore, after excluding these two participants, 18 (eight males and ten females) were included in the following analyses.
The mean amplitudes of the TES current wave were calculated for each foot and participant. Across participants, the averaged amplitudes for the FRONT and BACK conditions on the left foot were 1.83 mA (SD = 1.05 mA) and 1.39 mA (SD = 0.97 mA), respectively. On the right foot, the averaged amplitudes for the FRONT and BACK conditions were 1.86 mA (SD = 1.23 mA) and 1.56 mA (SD = 1.08 mA), respectively.
The mean SSQ total severity scores before and after the experiment were 2.35 (SE = 0.31) and 16.02 (SE = 2.12). When multiple comparisons of the scores for each index were conducted using the Steel-Dwass method, a significant difference was found in the total severity index, which reflects the overall tendency of simulator sickness between before and after the experiment
The mean IPQ presence score was 3.35 (SE = 0.71), indicating that the participants felt moderately immersed in the VE. This suggests that the experiment was conducted under appropriate conditions.
Regarding the answers obtained using the platform, we calculated the average of the two tilt angles obtained for each condition within a participant and defined it as the “adjusted tilt angle” for that condition. Figure 4 illustrates the adjusted tilt angle, with the inclination angle of the visual condition on the horizontal axis and the adjusted tilt angle on the vertical axis. We performed the Shapiro-Wilk normality test on the adjusted tilt angle data, grouped according to the combination of visual and electrical stimulation conditions. The result showed that six out of the 15 groups (5 visual conditions

Figure 4. The adjusted tilt angle data in Experiment 1. The horizontal axis represents the inclination angle of the visual condition. The vertical axis represents the adjusted tilt angle. The error bars indicate standard errors.
Subsequent multiple comparison tests using the ART-C (Elkin et al., 2021) were conducted to examine differences among the visual and electrical stimulation conditions. For the visual stimulation condition, significant differences were found among all combinations of UP10, UP5, FLAT, DOWN5, and DOWN10. For the electrical stimulation condition, a marginally significant difference was observed between FRONT and BACK
The analysis revealed a marginally significant effect of the electrical stimulation factor
However, it is important to note that the p-value of the comparison between FRONT and BACK was not smaller than the commonly used significance level of 0.05. Therefore, the result should be interpreted with caution. There are three possible causes why the experiment did not yield a significant effect of electrical stimulation.
First, there may be individual differences in interpreting sensations presented by ankle TES (Possible cause I). Figure 4 and test outcomes suggest that most participants experienced descending slopes upon FRONT condition TES, while a sensation of ascending slopes was experienced with BACK condition TES. Conversely, some participants reported sensations of ascending slopes with FRONT condition TES, while a sensation of descending slopes with BACK condition TES. This variability may stem from differences in participants’ interpretation of the sensation induced by ankle TES. According to the free-form comments, the former group primarily focused on the irritation of the ankle’s skin surface elicited by electrical stimulation or on the force sensation that the muscles were elongated. In contrast, the latter group focused on the subjective body tilt sensation induced by ankle TES. Specifically, most of the former group may have interpreted the irritation on the anterior side of the foot induced by FRONT condition TES as comparable to the sensation of muscle activation at descending slopes, while the irritation on the posterior side of the foot induced by the BACK condition TES as comparable to the sensation of muscle activation at ascending slopes. This interpretation is plausible because many muscles, other than the tibialis anterior, are more active during downhill walking, while the tibialis anterior is more active during uphill walking (Lay et al., 2007). Moreover, part of the former group may have associated the force sensation induced by FRONT condition TES with an ankle postural change when standing uphill and the force sensation induced by BACK TES with an ankle postural change when standing downhill. It is also natural since when a person stands on a downhill slope, the front of the ankle is extended, and when they stands on an uphill slope, the back side of the ankle is extended. We named these pattern’s interpretation “Interpretation FRONT–DOWN” (Figure 5A). In contrast, the latter group may have interpreted the posterior body tilt sensation during FRONT condition TES as comparable to a sensation of standing on an uphill slope, while the anterior body tilt sensation during BACK condition TES as comparable to a sensation of standing on a downhill slope, as depicted in Figure 5B. We named this pattern’s interpretation “Interpretation FRONT–UP.” Vectional (Berthoz et al., 1975; Wong and Frost, 1981) and tendon vibrational (Narita et al., 2023) stimulations are also subject to discrepancies of interpretation in that the stimulations are felt as a sense of self-motion or as a change in the environment. This difference in perceiving stimuli has been reported in various fields. However, such discrepancies in interpretation have not been reported in the previous study about ankle TES in the upright posture (Takahashi et al., 2022).
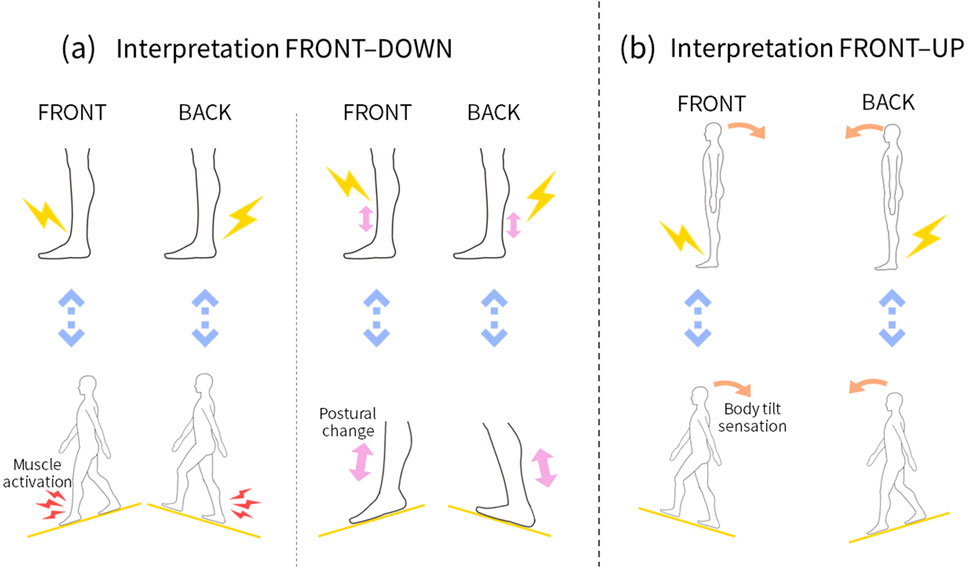
Figure 5. Differences in the interpretation of sensations presented by ankle TES: (A) Interpretation linking ankle surface stimulation generated by electrical stimulation to foot muscle activation caused by a slope, and interpretation linking the force sensation elicited by TES to the ankle’s postural change on a slope. (B) Interpretation linking the body tilt sensation generated by electrical stimulation to the body tilt sensation caused by standing on a slope.
Second, the duration of the electrical stimulation might have been too short (Possible cause II). As a post hoc analysis, we examined the average duration of electrical stimulation. First, the time from when the foot touched the ground to when it left the ground was calculated for all stepping from the trackers’ information. Next, outliers in the top 5% and bottom 5% were excluded, and the remaining values were averaged. Finally, the values were averaged across all participants. The average duration of electrical stimulation was 0.685 s, with a standard deviation of 0.102. The previous study (Takahashi et al., 2022) has shown that a latency of approximately 0.9–1.9 s occurs in the CoP movement, suggesting that the electrical stimulation might have ended before it had a significant effect in this study. A potential solution to this problem is to provide continuous electrical stimulation instead of only when the foot is in contact with the ground.
Lastly, the insufficient amplitude of the current wave of the ankle TES may also be a possible cause (Possible cause III). The amplitude used in our study was lower overall compared to the previous study (Takahashi et al., 2022). To overcome this problem, electrodes with a larger contact surface area with the skin can be used to increase the amplitude without causing discomfort to the participants.
Among these three possible causes, we hypothesized that the possible causes I and II were the essential factors. Therefore, we developed two corresponding hypotheses:
H I The adjusted tilt angle of the participants may differ depending on their interpretation of the sensation induced by the electrical stimulation.
H II Increasing the duration of electrical stimulation will strengthen the effect of electrical stimulation.
In Section 4, another experiment was conducted to test these hypotheses.
In Experiment 2, we aimed to test H I and H II by making two key alterations to the methods used in Experiment 1. Two changes were implemented to understand the effects of ankle TES better and address the concerns that arose from the marginally significant results observed in Experiment 1. The specific modifications made in Experiment 2 were:
The protocol of Experiment 2 was also approved by the local ethics committee at the researchers’ organization and was implemented in accordance with the ethical standards outlined in the Declaration of Helsinki.
In Experiment 2, the experimental setup closely resembled Experiment 1, with one key difference: the grounding detection system using membrane switches was removed. This alteration allowed the electrical stimulation to be applied constantly rather than only when the foot was grounded. The removal of the grounding detection system was implemented to test the effects of constant electrical stimulation on participants’ perception of ascending or descending slopes.
A total of 24 participants, comprising 12 males and 12 females with a mean age of 26.4, were recruited through social media and participated in this experiment. Each participant received an Amazon gift card worth approximately 20 USD as a reward. Apart from the modification mentioned earlier, the experimental conditions in Experiment 2 remained consistent with those in Experiment 1.
The experimental procedure for Experiment 2 is identical to that for Experiment 1, up until the phase where the participant practices walking on a slope in a VE using the WIP system.
The participant walked on slopes of varying degrees in the VE, depending on the visual condition, while ankle TES was applied in different stimulation sites depending on the electrical stimulation condition. As described in section 3.2, there were five visual conditions and three electrical stimulation conditions, resulting in 15 possible combinations. Each was repeated twice, resulting in a total of 30 trials. The order of the trials was randomized.
The electrical stimulation condition, visual condition, and number of task repetitions were the same as those in Experiment 1.
The foot-step task was performed as follows:
1. The participant performed the foot-step task for 12 s.
2. Upon completion, the screen went dark. Subsequently, the participant stepped onto the platform, whose angles could be changed (Figure 3).
3. The participant repeatedly responded to whether the sensation of ascending or descending experienced while stepping in the VE was steeper or gentler than the sensation presented by the platform. The angle was changed multiple times following the PEST rule (Taylor and Creelman, 1967).
After completing the 30 trials, the participant removed the experimental equipment. Then, the participant filled in the SSQ and IPQ and was interviewed orally on the following topics:
Q1 During the trial, could you identify which body part was receiving electrical stimulation? If you could discriminate, what do you think was the tendency of your sensation of ascending or descending induced by anterior ankle TES?
Q2 Did you experience any discomfort from the electrical stimulation, and if so, what was the sensation?
Q3 Please let us know if you have any comments about the experiment.
The experimenter asked for more detailed responses if the participants’ answers to these questions were ambiguous. However, to avoid bias, the experimenter did not add their interpretation by asking the participant if this was what they meant.
Finally, the participant received the reward and signed the receipt.
Figure 6 illustrates the adjusted tilt angle data in Experiment 2. Like Experiment 1, an aligned rank transform was applied, and then the two-way ANOVA was performed. The results of ART ANOVA revealed significant differences in the visual condition
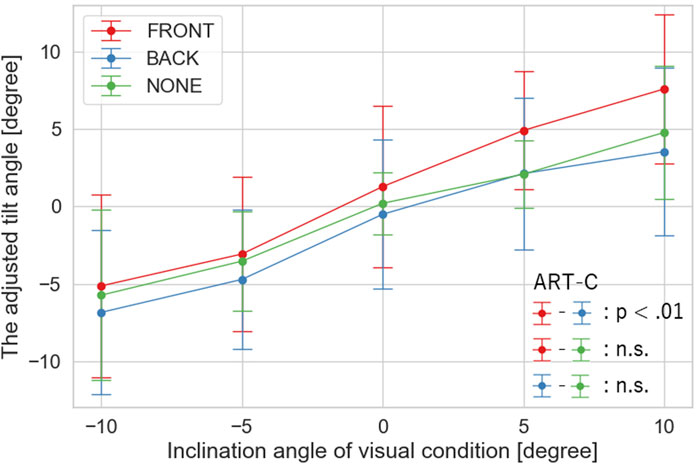
Figure 6. The adjusted tilt angle data in Experiment 2. The horizontal axis represents the inclination angle of the visual condition. The vertical axis represents the adjusted tilt angle. The error bars indicate standard errors.
Next, to test H I, we divided the participants into three groups based on their responses to Q2. The three groups are a group of participants who perceived FRONT condition’s ankle TES to enhance the uphill incline sensation (Group FRONT–UP), a group of participants who perceived FRONT condition’s ankle TES to enhance the downhill incline sensation (Group FRONT–DOWN), a group of participants who were unable to discern the ankle TES conditions during the experiment (Group Indistinguishable). Group FRONT–UP consisted of eleven participants, Group FRONT–DOWN consisted of seven participants, and Group Indistinguishable comprised six participants. Figure 7 illustrates the adjusted tilt angle for the Group FRONT–UP (a), the Group FRONT–DOWN (b), and the Group Indistinguishable (c). The horizontal axis represents the inclination angle of the visual condition, and the vertical axis represents the adjusted tilt angle. For each of these four cases, we conducted ART ANOVA and ART-C. We applied the Bonferroni correction to account for the four-fold increase in testing compared to Experiment 1.
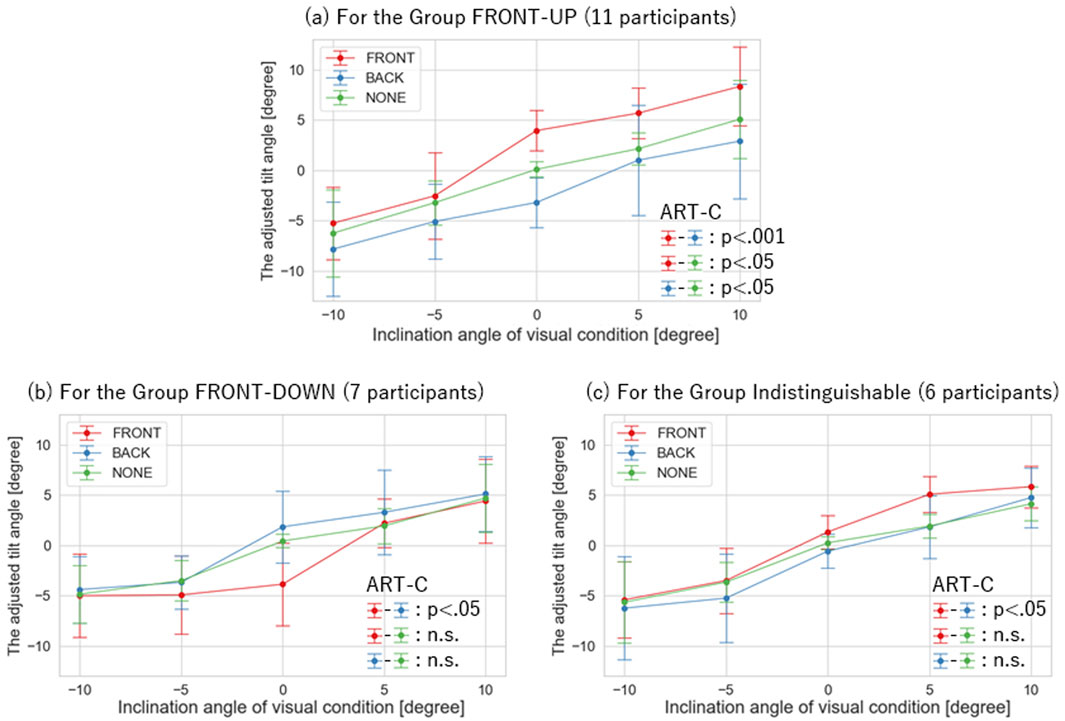
Figure 7. The adjusted tilt angle data splitting the participants by their interpretation group, (A) for the Group FRONT-UP, (B) for the Group FRONT-DOWN, (C) for the Group Indistinguishable. The horizontal axis represents the inclination angle of the visual condition. The vertical axis represents the adjusted tilt angle. The error bars indicate standard errors.
Concerning Group FRONT–UP, the result of ART ANOVA revealed significant differences in the visual condition
As for Group FRONT–DOWN, the ART ANOVA revealed a significant difference in the visual condition
With respect to Group Indistinguishable, the results of ART ANOVA revealed significant differences in the visual condition
The amplitude of the current wave of TES was determined for each foot and participant. Across participants, the averaged amplitudes for the FRONT and BACK conditions on the left foot were 1.86 mA (SD = 0.69 mA) and 1.46 mA (SD = 0.64 mA), respectively. On the right foot, the averaged amplitudes for the FRONT and BACK conditions were 1.90 mA (SD = 0.68 mA) and 1.51 mA (SD = 0.68 mA), respectively.
The mean SSQ total severity scores before and after the experiment were 2.55 (SE = 0.41) and 13.02 (SE = 4.22). When multiple comparisons of the scores for each index were conducted using the Steel-Dwass method, a significant difference was found in Total Severity (the overall tendency of simulator sickness) between before and after the experiment
The mean IPQ presence score was 4.17 (SE = 0.83), indicating that the participants felt moderately immersed in the VE. This suggests that the experiment was conducted under appropriate conditions.
Finally, Table 1 presents the interview results. As mentioned previously, based on their responses to Q1, eleven participants were categorized into Group FRONT–UP, seven in Group FRONT–DOWN, and six in Group INDISTINGUISHABLE. In response to Q2, three participants reported that the electrical stimulation was uncomfortable. Further questions revealed that four of the seven respondents classified as FRONT–DOWN in Q1 reported a strong tactile sensation on their skin surface at the beginning of the electrical stimulation. However, not all of them felt uncomfortable. In Q3, we received various comments, but one particularly interesting response is as follows: Four out of the 24 experimental participants reported confusion when the sensation of body tilt induced by electrical stimulation did not correspond to the sensation of body tilt induced by the visual condition. All four participants belonged to Group FRONT–UP.
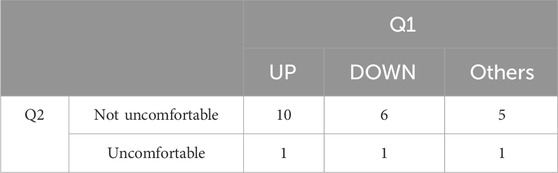
Table 1. Results of the interviews with the number of people counted for each answer to Q1 and Q2.
Regarding the adjusted tilt angle data for all participants (Figure 6), the test results also revealed a significant difference in the electrical stimulation condition, indicating that the effect of electrical stimulation became more prominent when it was applied not only when the foot was on the ground but also at all times. Therefore, this result supports H II (increasing the duration of electrical stimulation will strengthen the effect of electrical stimulation). Interestingly, the direction of the electrical stimulation effect of Experiment 2 was entirely contrary to that of Experiment 1. This suggests that the interpretation of ankle TES can be controlled by using intermittent and constant ankle TES properly.
In the adjusted tilt angle data for participants in Group FRONT–UP (Figure 7A), the test result revealed a significant difference in the electrical stimulation condition with a higher effect size than in all participants (Figure 6). This may be attributed to the fact that Group FRONT–UP consists of participants who experienced an upward sensation with anterior electrical stimulation and a downward sensation with posterior electrical stimulation.
Here, we present a quantitative evaluation of the adjusted tilt angle in Group FRONT–UP participants. The mean adjusted tilt angles were 3.95, −3.20, 8.34, and −7.84° for the FRONT–FLAT, BACK–FLAT, FRONT–UP10, and BACK–DOWN10 electric stimulus and visual condition combinations, respectively. The International Building Code, which is one of the international building standards (Council, 2018), defines the marginal gradient of slope at which a wheelchair user can self-propel as 1:12 (4.76-degree slope), and the preferred slope for a wheelchair user as 1:15 (3.81-degree slope). Therefore, we can conclude that ankle TES alone can simulate a slope-like incline in a barrier-free environment, and when combined with visual conditions, it can even simulate steeper slopes.
Concerning the adjusted tilt angle data for participants in Group FRONT–DOWN (Figure 7B), the test result revealed significant differences in the effects of electrical stimulation with anterior electrical stimulation enhancing the sensation of descent and posterior electrical stimulation enhancing the sensation of ascent. When analyzing the responses of Group FRONT–DOWN participants to Q1 and Q2, it was found that four out of the seven participants reported experiencing a strong tactile sensation on the skin surface at the beginning of the electrical stimulation. Although this sensation was not strong enough to interfere with the VR experience, they expected it to influence their responses to the sensation of body tilt. Based on this, it is suggested that the tactile sensation on the ankle skin surface had a stronger influence on the participants in Group FRONT–DOWN than the body tilt sensation generated by the ankle TES, leading them to experience a sensation of descent during the electric stimulation in the FRONT condition and a sensation of ascent during the electric stimulation in the BACK condition. In addition, two participants mentioned about the force sensation. According to their comments, the FRONT TES generates the force sensation that emulates an ankle postural change when standing uphill, and the BACK TES generates the force sensation that emulates an ankle postural change when standing downhill.
Now, we will consider the fact that in Experiment 1, the majority of participants felt a sensation of descent with the FRONT condition TES and a sensation of ascent with the BACK condition TES, while in Experiment 2, as explained above, the majority of participants felt a sensation of ascent with electrical stimulation in the FRONT condition and a sensation of descent with electrical stimulation in the BACK condition. It is hypothesized that many participants in Experiment 1 were strongly influenced by tactile sensation on the skin surface, similar to the participants in Group FORNT–DOWN of Experiment 2. The duration of each electrical stimulation in Experiment 1 was relatively short, making it more likely for participants to notice the tactile sensation on the skin surface generated at the commencement of the electrical flow. As reported in several studies that simulated electrical stimulation, the highest current density during electrical stimulation occurs at the skin surface where the electrodes are applied (Laakso and Hirata, 2013; Laakso et al., 2014; Kanamaru et al., 2021). Therefore, for some individuals, the tactile sensation on the skin surface is inevitable but can be reduced by utilizing electrodes with a larger contact surface area to lower the current density at the skin surface.
Regarding the adjusted tilt angle data for participants in Group Indistinguishable (Figure 7C), there was a significant difference in the electrical stimulation condition. This group consisted of participants who could not distinguish during the experiment where the electrical stimulation was flowing. Given this, it is interesting to note that ankle TES might still be effective even for participants unaware of its mechanism of generating tilt sensation.
Concerning the result of Q3, five out of the 24 experimental participants reported confusion when the sensation of body tilt induced by electrical stimulation did not correspond to the sensation of body tilt induced by the visual condition. All five participants were in Group FRONT–UP. This finding is consistent with Figure 6B, which shows that the effect of the FRONT condition was stronger when the visual conditions were UP10 and UP5 than when the visual conditions were FLAT, DOWN5, and DOWN10. In other words, a positive interaction effect may occur when the slope sensation induced by the electrical stimulus matches the slope sensation induced by the visual condition compared to when they do not match. This could be explained by the fact that some marginally significant interactions were observed in Group FRONT–UP and several other cases.
Finally, we present an implementation guide for a system that enables all users to experience the desired sensation of ascending or descending slopes, based on the fact that some users may perceive the same stimulus as uphill and others as downhill, depending on their interpretation of the sensation caused by the electrical stimulus. Firstly, it can be concluded that constant ankle TES is more desirable than intermittent ankle TES, as its main effect was more pronounced in Experiment 2 than in Experiment 1. Figure 8 illustrates the proposed implementation guide of the WIP system using ankle TES. In this implementation guide, a user will first experience the TES. Then, the user answers two questions about their interpretation. Then, the system is set up based on the answers. In this way, the system can resolve the differences in interpretation and generate the desired sensations for all users.
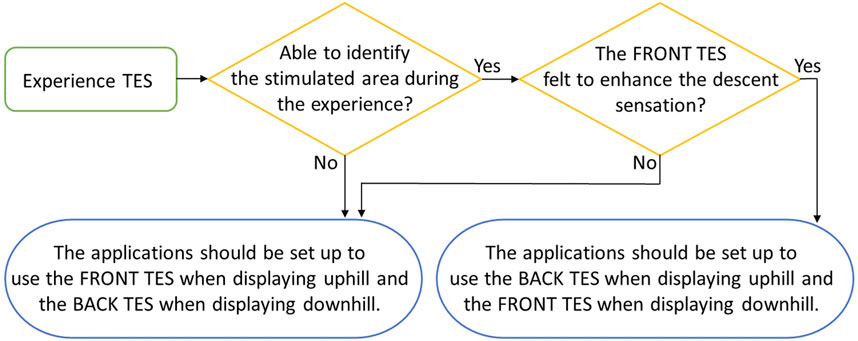
Figure 8. The implementation guide of the WIP system using ankle TES.
In this experiment, the participants walked in a simple sloped VR environment. Experiment 2 demonstrated that the proposed method could reproduce the sensation of walking in such a constantly sloped environment. However, Experiment 1 suggested that short, intermittent electrical stimulation might not effectively convey the sensation of walking uphill or downhill. Therefore, the proposed method may not be able to reproduce very short virtual slopes. Additionally, one condition of electrical stimulation was applied during walking to generate a realistic walking sensation in the experiments. However, to enable users to walk through various terrains in VEs freely, a method is required to predict the user’s walking path and apply electrical stimulation at appropriate times.
Experiment 2 demonstrated that some users who associate the body tilt sensation generated by ankle TES with the body tilt sensation induced by standing on a slope reported that the anterior ankle TES enhances the sensation of ascending, and the posterior ankle TES enhances the sensation of descending. Conversely, other users who associate the tactile sensation produced by ankle TES with irritation to the foot caused by a slope or who associate the force sensation produced by TES to the ankle postural change reported that the anterior ankle TES enhances the sensation of descending and posterior ankle TES enhances the sensation of ascending. Although this study addressed this issue by presenting the implementation guide in Figure 8, it is hoped that future research will find a method that produces the same sensation of ascending or descending under the same electrical stimulation conditions for all users. One approach may be to incorporate multimodal cues, as was done in the previous study on upper limb TES (Takahashi et al., 2019). For example, combining the modulation of somatic sensations by ankle TES with the modulation of vestibular sensations by GVS (Aoyama et al., 2015) could reduce the discrepancy in the interpretation of sensations among users. Besides, the sensations induced by the same electrical stimulation conditions were the exactly opposite in Experiments 1 and 2, suggesting that whether the electrical stimulation is intermittent or constant may influence interpretation. In light of this, it would also be worthwhile to investigate the effects of stimulation duration and whether the stimulation is intermittent or constant on the interpretation of electrical stimulation.
This study demonstrated the effectiveness of ankle TES in WIP (foot-stepping state). As mentioned in Section 2.3, human postural control mechanisms vary across different motor states. Therefore, future studies should examine the effectiveness of ankle TES during actual walking with forward motion. Additionally, by analyzing posture during walking, it may be possible to develop a locomotion method with ankle TES that optimizes the timing of stimulation during the gait cycle, a topic not addressed in this study.
Finally, we plan to apply ankle TES to VR locomotion methods other than WIP. The previous research (Takahashi et al., 2022) has confirmed that electrical stimulation to the Flexor Digitorum Longus muscle tendon, which runs inside the ankle, and the Peroneus Longus muscle tendon, which runs outside the ankle, can cause the subjective body tilt sensation. We are also considering applying the electrical stimulation of these tendons to VR content. For example, TES to these tendons also induces body sway. It may be effective in manipulating users’ walking paths in RDW. While electrical muscle stimulation (Auda et al., 2019) and galvanic vestibular stimulation (Hwang et al., 2023) have been applied to RDW to realize infinite walking in VEs, but no studies have applied ankle TES to RDW. TES may expand the potential of RDW because it can affect somatosensory perception in the ankle, which is very close to the ground and an essential body part in walking, and because the stimulation site is small, and force sensation can be generated with a small amount of power.
In this study, we proposed a novel VR locomotion technique that integrates ankle TES into WIP to induce a sensation of ascending and descending slopes. The effectiveness of this proposed method was evaluated through two experiments. In Experiment 1, we applied electrical stimulation only when the foot touched the ground and evaluated the sensation of ascending and descending slopes generated by the proposed method using a platform whose angle can be changed. However, the effect of the electrical stimulation was only marginally significant. To address this, we identified two possible causes. First, there may be various interpretations of the sensation generated by the electrical stimulation. Second, the duration of the electrical stimulation may be inadequate. Based on these assumptions, we conducted Experiment 2 in a setup where ankle TES was constantly applied. The results indicated a significant effect of electrical stimulation. Additionally, we analyzed the sensation of ascending or descending by categorizing the participants based on their responses to oral questions about how they interpreted the sensations elicited by the ankle TES. We found that participants who focused on a subjective body tilt sensation elicited by TES and those unaware of the TES effect experienced an ascending sensation with anterior ankle TES and a descending sensation with posterior ankle TES. Conversely, participants who focused on the tactile sensation induced by ankle TES as a leg irritation while walking on a slope experienced the opposite effect. This suggests that we can design an appropriate electrical stimulation to induce desired slope perceptions by investigating the user’s interpretations of sensations induced by ankle TES. Based on this finding, we have constructed an implementation guide for the WIP system that presents the desired sensation of ascending or descending slopes in VEs. We hope that this study will provide important insights regarding the implementation of VR locomotion methods using ankle TES.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
The studies involving humans were approved by the ethics committee of the university of Tokyo. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study.
TO: Conceptualization, Investigation, Writing–original draft. KM: Writing–review and editing. KA: Writing–review and editing. TA: Writing–review and editing. TN: Writing–review and editing. HK: Writing–review and editing.
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This research was supported by JSPS KAKENHI (24KJ0926, 22H03628, 21H04883).
We used OpenAI’s ChatGPT-4 for proofreading and language editing to improve the clarity and readability of the manuscript.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Ang, Y., Sulaiman, P. S., Rahmat, R. W. O. K., and Mohd Norowi, N. (2019). Swing-in-place (sip): a less fatigue walking-in-place method with side-viewing functionality for mobile virtual reality. IEEE Access 7, 183985–183995. doi:10.1109/ACCESS.2019.2960409
Aoyama, K., Iizuka, H., Ando, H., and Maeda, T. (2015). Four-pole galvanic vestibular stimulation causes body sway about three axes. Sci. Rep. 5, 10168–8. doi:10.1038/srep10168
Auda, J., Pascher, M., and Schneegaß, S. (2019). Around the (virtual) world: infinite walking in virtual reality using electrical muscle stimulation, 1–8. doi:10.1145/3290605.3300661
Berthoz, A., Pavard, B., and Young, L. R. (1975). Perception of linear horizontal self-motion induced by peripheral vision (linearvection) basic characteristics and visual-vestibular interactions. Exp. brain Res. 23, 471–489. doi:10.1007/BF00234916
Boletsis, C. (2017). The new era of virtual reality locomotion: a systematic literature review of techniques and a proposed typology. Multimodal Technol. Interact. 1, 24. doi:10.3390/mti1040024
Boletsis, C., and Chasanidou, D. (2022). A typology of virtual reality locomotion techniques. Multimodal Technol. Interact. 6, 72. doi:10.3390/mti6090072
Bruno, L., Madeiras Pereira, J., and Jorge, J. (2013). A new approach to walking in place. Berlin, Heidelberg: Springer.
Caserman, P., Garcia-Agundez, A., Gámez Zerban, A., and Göbel, S. (2021). Cybersickness in current-generation virtual reality head-mounted displays: systematic review and outlook. Virtual Real. 25, 1153–1170. doi:10.1007/s10055-021-00513-6
Cherni, H., Métayer, N., and Souliman, N. (2020). Literature review of locomotion techniques in virtual reality. Int. J. Virtual Real. 20, 1–20. doi:10.20870/IJVR.2020.20.1.3183
Council, I. C. (2018). 2018 international building Code. Available at: https://www.iccsafe.org/products-and-services/i-codes/2018-i-codes/ibc/.
Elkin, L. A., Kay, M., Higgins, J. J., and Wobbrock, J. O. (2021). “An aligned rank transform procedure for multifactor contrast tests,” in The 34th annual ACM symposium on user interface software and Technology (New York, NY, USA: Association for Computing Machinery), 754–768. doi:10.1145/3472749.3474784
Feasel, J., Whitton, M. C., and Wendt, J. D. (2008). Llcm-wip: low-latency, continuous-motion walking-in-place. 2008 IEEE Symposium 3D User Interfaces. doi:10.1109/3DUI.2008.4476598
Hanson, S., Paris, R. A., Adams, H. A., and Bodenheimer, B. (2019). “Improving walking in place methods with individualization and deep networks,” in 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) (IEEE), 367–376.
Hirao, Y., Narumi, T., Argelaguet, F., and Lécuyer, A. (2024). Revisiting walking-in-place by introducing step-height control, elastic input, and pseudo-haptic feedback. IEEE Trans. Vis. Comput. Graph. 30, 3210–3223. doi:10.1109/TVCG.2022.3228171
Hirao, Y., Narumi, T., Argelaguet Sanz, F., and Lécuyer, A. (2021). “Shef-wip: walking-in-place based on step height and frequency for wider range of virtual speed,” in 2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), 498–499. doi:10.1109/vrw52623.2021.00131
Hwang, S., Lee, J., Kim, Y., Seo, Y., and Kim, S. (2023). “Electrical, vibrational, and cooling stimuli-based redirected walking: comparison of various vestibular stimulation-based redirected walking systems,” in Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (New York, NY, USA: Association for Computing Machinery).
igroup.org (2001). Igroup presence questionnaire (ipq). Available at: https://www.igroup.org/pq/ipq/index.php.
Iwata, H., Yano, H., Fukushima, H., and Noma, H. (2004). Circulafloor. ACM SIGGRAPH 2004 Emerg. Technol. 3, 3. doi:10.1145/1186155.1186159
Iwata, H., Yano, H., and Nakaizumi, F. (2001). Gait master: a versatile locomotion interface for uneven virtual terrain. Proc. IEEE Virtual Real. 2001, 131–137. doi:10.1109/VR.2001.913779
Jami, L. (1992). Golgi tendon organs in mammalian skeletal muscle: functional properties and central actions. Physiol. Rev. 72, 623–666. doi:10.1152/physrev.1992.72.3.623
Je, S., Lim, H., Moon, K., Teng, S.-Y., Brooks, J., Lopes, P., et al. (2021). “Elevate: a walkable pin-array for large shape-changing terrains,” in Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems (New York, NY, USA: Association for Computing Machinery).
Kanamaru, M., Tan, P. X., and Kamioka, E. (2021). Simulation-based clarification of appropriate factors for presenting phosphene in two directions avoiding electrical interference. Bioengineering 8, 111. doi:10.3390/bioengineering8080111
Kaneko, H., Amemiya, T., Yem, V., Ikei, Y., Hirota, K., and Kitazaki, M. (2018). Leg-jack: generation of the sensation of walking by electrical and kinesthetic stimuli to the lower limbs. SIGGRAPH Asia 2018 Emerg. Technol., 1–2. doi:10.1145/3275476.3275483
Kennedy, R. S., Lane, N. E., Berbaum, K. S., and Lilienthal, M. G. (1993). Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. Int. J. Aviat. Psychol. 3, 203–220. doi:10.1207/s15327108ijap0303_3
Kobayashi, M., Kon, Y., and Kajimoto, H. (2019). “Detection threshold of the height difference between a visual and physical step,” in Proceedings of the 10th Augmented Human International Conference 2019 (New York, NY, USA: Association for Computing Machinery).AH2019
Laakso, I., and Hirata, A. (2013). Computational analysis shows why transcranial alternating current stimulation induces retinal phosphenes. J. neural Eng. 10, 046009. doi:10.1088/1741-2560/10/4/046009
Laakso, I., Matsumoto, H., Hirata, A., Terao, Y., Hanajima, R., and Ugawa, Y. (2014). Multi-scale simulations predict responses to non-invasive nerve root stimulation. J. neural Eng. 11, 056013. doi:10.1088/1741-2560/11/5/056013
Lay, A. N., Hass, C. J., Nichols, T. R., and Gregor, R. J. (2007). The effects of sloped surfaces on locomotion: an electromyographic analysis. J. biomechanics 40, 1276–1285. doi:10.1016/j.jbiomech.2006.05.023
Matsumoto, K., Narumi, T., Tanikawa, T., and Hirose, M. (2017). Walking uphill and downhill: redirected walking in the vertical direction. ACM SIGGRAPH 2017 Posters, 1–2. doi:10.1145/3102163.3102227
Nagao, R., Matsumoto, K., Narumi, T., Tanikawa, T., and Hirose, M. (2017). Infinite stairs: simulating stairs in virtual reality based on visuo-haptic interaction. ACM SIGGRAPH 2017 Emerg. Technol 24 (4), 1584–1593. doi:10.1145/3084822.3084838
Nagao, R., Matsumoto, K., Narumi, T., Tanikawa, T., and Hirose, M. (2018). Ascending and descending in virtual reality: simple and safe system using passive haptics. IEEE Trans. Vis. Comput. Graph. 24, 1584–1593. doi:10.1109/TVCG.2018.2793038
Narita, E., Nakayama, S., Manabe, M., Ushiyama, K., Tanaka, S., Mizoguchi, I., et al. (2023). Manipulation of body sway interpretation through kinesthetic illusion induced by ankles vibration. 2023 IEEE World Haptics Conf. (WHC), 114–120. doi:10.1109/WHC56415.2023.10224464
Nilsson, N. C., Serafin, S., and Nordahl, R. (2016). “Walking in place through virtual worlds,” in Proceedings, Part II, of the 18th International Conference on Human-Computer Interaction. Interaction Platforms and Techniques - Volume 9732 (Berlin, Heidelberg: Springer-Verlag), 37–48.
Nilsson, N. C., Serafin, S., Steinicke, F., and Nordahl, R. (2018). Natural walking in virtual reality: a review. Comput. Entertain. 16, 1–22. doi:10.1145/3180658
Ogawa, K., Fujita, K., Takashima, K., and Kitamura, Y. (2022). “Pseudojumpon: jumping onto steps in virtual reality,” in 2022 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) (IEEE), 635–643.
Razzaque, S., Kohn, Z., and Whitton, M. C. (2001). Redirected walking. Eurogr. 2001 - Short. Present. Eurogr. Assoc. doi:10.2312/egs.20011036
Schmidt, D., Kovacs, R., Mehta, V., Umapathi, U., Köhler, S., Cheng, L.-P., et al. (2015). Level-ups: motorized stilts that simulate stair steps in virtual reality. Proc. 33rd Annu. ACM Conf. Hum. Factors Comput. Syst. 20, 2157–2160. doi:10.1145/2702123.2702253
Seo, M. Y., and Kang, H. Y. (2021). Toward virtual stair walking. Vis. Comput. Int. J. Comput. Graph. 37, 2783–2795. doi:10.1007/s00371-021-02179-2
Shimamura, R., Kayukawa, S., Nakatsuka, T., Miyakawa, S., and Morishima, S. (2019). A study on the sense of burden and body ownership on virtual slope. 2019 IEEE Conf. Virtual Real. 3D User Interfaces (VR), 1154–1155. doi:10.1109/VR.2019.8797960
Slater, M., Usoh, M., and Steed, A. (1995). Taking steps: the influence of a walking technique on presence in virtual reality. ACM Trans. Comput.-Hum. Interact. 2, 201–219. doi:10.1145/210079.210084
Stanney, K. M., Kennedy, R. S., and Drexler, J. M. (1997). Cybersickness is not simulator sickness. Proc. Hum. Factors Ergonomics Soc. Annu. Meet. 41, 1138–1142. doi:10.1177/107118139704100292
Takahashi, A., Tanabe, K., and Kajimoto, H. (2016). Relationship between force sensation and stimulation parameters in tendon electrical stimulation. AsiaHaptics, 233–238. doi:10.1007/978-981-10-4157-0_40
Takahashi, A., Tanabe, K., and Kajimoto, H. (2018). Investigation on the cutaneous/proprioceptive contribution to the force sensation induced by electrical stimulation above tendon. Proc. 24th ACM Symposium Virtual Real. Softw. Technol., 1–2. doi:10.1145/3281505.3283402
Takahashi, A., Tanabe, K., and Kajimoto, H. (2019). Haptic interface using tendon electrical stimulation with consideration of multimodal presentation. Virtual Real. and Intelligent Hardw. 1, 163–175. doi:10.3724/SP.J.2096-5796.2019.0011
Takahashi, N., Amemiya, T., Narumi, T., Kuzuoka, H., Hirose, M., and Aoyama, K. (2022). Sensation of anteroposterior and lateral body tilt induced by electrical stimulation of ankle tendons. Front. Virtual Real. 3. doi:10.3389/frvir.2022.800884
Taylor, M., and Creelman, D. (1967). Pest: efficient estimates on probability functions. J. Acoust. Soc. Am. 41, 782–787. doi:10.1121/1.1910407
Wang, L., Chen, X., Dong, T., and Fan, J. (2021). Virtual climbing: an immersive upslope walking system using passive haptics. Virtual Real. and Intelligent Hardw. 3, 435–450. doi:10.1016/j.vrih.2021.08.008
Wang, Y., and Minor, M. A. (2018). Design and evaluation of a soft robotic smart shoe for haptic terrain rendering. IEEE/ASME Trans. Mechatronics 23, 2974–2979. doi:10.1109/TMECH.2018.2871631
Wee, C., Yap, K. M., and Lim, W. N. (2021). Haptic interfaces for virtual reality: challenges and research directions. IEEE Access 9, 112145–112162. doi:10.1109/ACCESS.2021.3103598
Wendt, J. D., Whitton, M. C., and Brooks, F. P. (2010). Gud wip: gait-understanding-driven walking-in-place. 2010 IEEE Virtual Real. Conf. (VR) 2010, 51–58. doi:10.1109/VR.2010.5444812
Winter, D. (1995). Human balance and posture control during standing and walking. Gait and Posture 3, 193–214. doi:10.1016/0966-6362(96)82849-9
Wobbrock, J. O., Findlater, L., Gergle, D., and Higgins, J. J. (2011). The aligned rank transform for nonparametric factorial analyses using only anova procedures. Proc. SIGCHI Conf. Hum. Factors Comput. Syst. 11, 143–146. doi:10.1145/1978942.1978963
Keywords: electrical stimulation, sensation of walking on a slop, virtual reality, walking-in-place, tendon electrical stimulation of the ankle
Citation: Ota T, Matsumoto K, Aoyama K, Amemiya T, Narumi T and Kuzuoka H (2024) Ankle tendon electrical stimulation to enhance sensation of walking on a slope in walking-in-place. Front. Virtual Real. 5:1456202. doi: 10.3389/frvir.2024.1456202
Received: 28 June 2024; Accepted: 30 September 2024;
Published: 23 October 2024.
Edited by:
Guido Brunnett, Chemnitz University of Technology, GermanyReviewed by:
Hiroyuki Kajimoto, The University of Electro-Communications, JapanCopyright © 2024 Ota, Matsumoto, Aoyama, Amemiya, Narumi and Kuzuoka. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Takashi Ota, b3RhQGN5YmVyLnQudS10b2t5by5hYy5qcA==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.