 Andre Paradise1†
Andre Paradise1† Sushrut Surve1†
Sushrut Surve1† Jovan C. Menezes1
Jovan C. Menezes1 Madhav Gupta1
Madhav Gupta1 Vaibhav Bisht1
Vaibhav Bisht1 Kyung Rak Jang1
Kyung Rak Jang1 Cong Liu1
Cong Liu1 Suming Qiu1
Suming Qiu1 Junyi Dong1
Junyi Dong1 Jane Shin2
Jane Shin2 Silvia Ferrari1*
Silvia Ferrari1*- 1Laboratory for Intelligent Systems and Controls (LISC), Sibley School of Mechanical and Aerospace Engineering, Cornell University, Ithaca, NY, United States
- 2Active Perception and Robot Intelligence Lab (APRILab), Department of Mechanical and Aerospace Engineering, University of Florida, Gainesville, FL, United States
Today’s research on human-robot teaming requires the ability to test artificial intelligence (AI) algorithms for perception and decision-making in complex real-world environments. Field experiments, also referred to as experiments “in the wild,” do not provide the level of detailed ground truth necessary for thorough performance comparisons and validation. Experiments on pre-recorded real-world data sets are also significantly limited in their usefulness because they do not allow researchers to test the effectiveness of active robot perception and control or decision strategies in the loop. Additionally, research on large human-robot teams requires tests and experiments that are too costly even for the industry and may result in considerable time losses when experiments go awry. The novel Real-Time Human Autonomous Systems Collaborations (RealTHASC) facility at Cornell University interfaces real and virtual robots and humans with photorealistic simulated environments by implementing new concepts for the seamless integration of wearable sensors, motion capture, physics-based simulations, robot hardware and virtual reality (VR). The result is an extended reality (XR) testbed by which real robots and humans in the laboratory are able to experience virtual worlds, inclusive of virtual agents, through real-time visual feedback and interaction. VR body tracking by DeepMotion is employed in conjunction with the OptiTrack motion capture system to transfer every human subject and robot in the real physical laboratory space into a synthetic virtual environment, thereby constructing corresponding human/robot avatars that not only mimic the behaviors of the real agents but also experience the virtual world through virtual sensors and transmit the sensor data back to the real human/robot agent, all in real time. New cross-domain synthetic environments are created in RealTHASC using Unreal Engine™, bridging the simulation-to-reality gap and allowing for the inclusion of underwater/ground/aerial autonomous vehicles, each equipped with a multi-modal sensor suite. The experimental capabilities offered by RealTHASC are demonstrated through three case studies showcasing mixed real/virtual human/robot interactions in diverse domains, leveraging and complementing the benefits of experimentation in simulation and in the real world.
1 Introduction
Emerging techniques in machine learning (ML), AI, and computer vision are able to equip the next-generation of autonomous robots with unprecedented sensing, cognitive, and decision-making skills (Bassyouni and Elhajj, 2021). These “smart” robots will inevitably interact with humans as part of collaborative robot teams in unstructured and dynamic environments, thus requiring fundamental cross-cutting research not only in engineering and computer science but also in the humanities (Fong et al., 2003; Pendleton et al., 2017; Liu et al., 2021). Real-world tests with human subjects in the loop are necessary in almost every sector of robotics, including defense, agriculture, healthcare, and emergency-response systems, to name a few. Humans that collaborate with AI software and/or autonomous robot teammates, also known as human-autonomy teams (HATs), will soon be required to solve complex and safety-critical tasks (Oh et al., 2017) such as target localization and mapping (Krajník et al., 2014), fire fighting (Naghsh et al., 2008), search and rescue (Spurnỳ et al., 2019), security and surveillance (Hu and Lanzon, 2018), and cooperative transportation (Chen et al., 2015). To date, controlled simulation and laboratory experiments have been primarily used by researchers in both industry and academia in order to develop and test new theories and algorithms. As a result, when introduced into real-world applications with humans-in-the-loop, they all too often fail because of unanticipated difficulties and environments. Deploying new decision and control algorithms in the field is not only costly but also poses safety hazards when humans are present and, at best, fails to provide researchers with the knowledge, control, and post-processing capabilities required during the development phase. Recent advancements in data-driven approaches for robotics applications also require large amounts of training data that may not always be available from real-world sensors (Choi et al., 2021).
In response to the aforementioned difficulties, various computer simulation platforms have emerged in the field of robotics and HAT collaborations (Puig et al., 2018; Deitke et al., 2020; Shen et al., 2021). These platforms have played a crucial role in the iterative development of autonomous robots by providing a safe and controlled environment for testing, training, and refining AI algorithms and behaviors. Simulation environments have also allowed researchers and developers to explore a wide range of scenarios, manipulate variables, and assess the performance of robot control and decision algorithms in a cost-effective and time-efficient manner. By testing physical and cognitive functions such as sensing, perception and control, simulation systems have enabled the evaluation and comparison of different robot design choices and interaction strategies. Virtual replicas of real-world robots, also known as digital twins, have in fact become increasingly popular in both industry and academia for research on robot control and operation (Garg et al., 2021). Traditional robot simulators such as Webots (Michel, 2004) and Gazebo (Koenig and Howard, 2004) rely on physics-based Open Dynamics Engine (ODE) for replicating robot motion and on 3D rendering engine for constructing the robot environment (Erez et al., 2015). Although this architecture has proven extremely useful to date, there remains a significant simulation-to-reality gap for testing more complex systems of human-robot teams (Škulj et al., 2021). In order to aid in the development of robust autonomy algorithms, simulation environments must address major challenges, including transferring knowledge from the virtual world to the real world; developing stochastic and realistic scenes; and developing fully interactive, multi-AI agent, scalable 3D environments (Reiners et al., 2021). Off-the-shelf game development software, such as Unity and Unreal Engine™ 4 (UE™) (Epic Games, 2019), has been gaining increasing attention because of its photorealistic rendering capabilities. New simulation frameworks such as AirSim (Shah et al., 2018), UnrealCV (Qiu and Yuille, 2016), and CARLA (Dosovitskiy et al., 2017) have also demonstrated success in training and verifying computer vision and perception-based algorithms. Additionally, leveraging VR technologies alongside such platforms has enabled studies on collaboration between humans and robots mimicked by digital twins (Mizuchi and Inamura, 2017; Inamura and Mizuchi, 2021; Murnane et al., 2021).
In particular, FlightGoggles, a Unity-based photorealistic sensor simulator for perception-driven robots, has begun to bridge the simulation-to-reality gap (Guerra et al., 2019). This previous work developed a novel hardware-in-the-loop approach by placing a real vehicle and human in a motion capture facility and augmenting them with an obstacle-populated virtual environment. This framework successfully created a photorealistic virtual world in which both robot and human perception occurred virtually. Additionally, FlightGoggles successfully implemented multiple simulated robots to demonstrate their computational capabilities within a novel system architecture. As autonomous robots and intelligent machines are becoming an integral part of collaborative human teams, a significant body of research has focused on identifying effective means of human-robot communication, task allocation, and multi-robot coordination (Gemerek et al., 2019; Ognibene et al., 2022). While FlightGoggles has proven the capability to incorporate robots and humans into a desired computing architecture, it does not yet support complex perception and control human-robot interactions in mixed real/virtual worlds.
The RealTHASC facility presented in this paper provides a new extended reality testbed within which researchers may investigate complex real-time human-robot and multi-robot interactions based on tailored combinations of exteroceptive and proprioceptive sensors installed on virtual and real-world agents. Its main contribution is a novel framework for integrating VR technology, embedded systems design, and computer graphics tools to enable safe, real-time, and photorealistic multi-agent interaction for collaborative decision-making in HATs. Novel software and hardware integration tools are required to support real-time perception feedback from virtual avatars to real agents, with information-driven planning and control in the loop. The ability to support perception-based control, real-time communication between real and virtual agents, and HAT interactions and collaboration in challenging test environments is also demonstrated. The formulation and nomenclature necessary for describing the real and virtual workspace, along with their respective agents, are introduced in Section 2. The architecture of the testbed, including the simulation environment, human interface, communication between the agents, and robot perception and planning, is described in Section 3. To demonstrate the modality of RealTHASC, three applications encompassing human-robot and multi-robot interaction are presented and analyzed in Section 4. Finally, possible future research directions are discussed in Section 5.
2 Mathematical preliminaries and notation
The RealTHASC facility consists of a novel HAT testbed comprised of collaborative agents, operating and interacting in and across physical and simulated worlds. Let the experimental region located inside the physical laboratory, defined as the real workspace, be denoted by
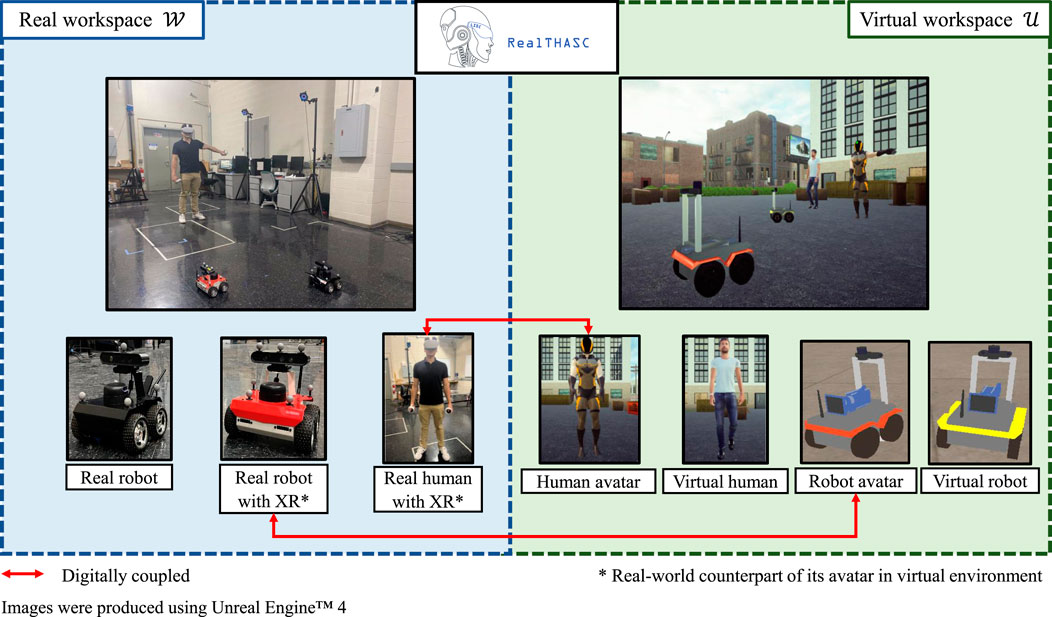
FIGURE 1. Real and virtual agents in the RealTHASC facility, where real agents with XR are digitally coupled with virtual avatars in Unreal Engine™.
Let R and H denote the index sets of robots and humans operating in
where the control vector consists of the robot linear velocity vi and angular velocity
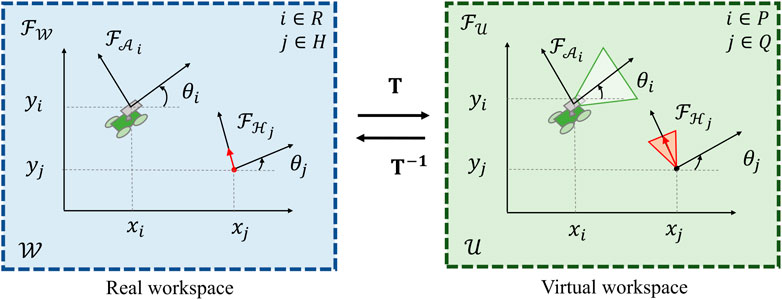
FIGURE 2. Configurations of a human and robot agent in the real workspace (left) and their corresponding avatars in the virtual workspace (right).
3 System architecture
Within RealTHASC, physical robots and real humans interact and communicate with simulated agents as well as avatars in photorealistic virtual environments (Section 3.1). A key capability of the facility is that both simulated agents and avatars sense the virtual environments by means of UE™ synthetic sensors, as shown in Figure 3, while possibly operating in potentially different real workspaces. Integrative cyber-physical interfaces (Sections 3.2–3.4) are leveraged to achieve this capability, thus enabling collaborative decision-making across real and synthetic worlds. This novel integration allows virtual environments to act as a common medium for safe yet realistic real-time inter-agent and agent-environment interactions. These interactions can then be modeled, analyzed, and leveraged for various applications without any restrictions imposed by the considerations normally associated with testing robots in the lab or in the wild, including safety and reproducibility. RealTHASC uses the 3D graphics development software, UE™, to create virtual environments. This provides the flexibility to test algorithms and collect data in a wide variety of environments such as subways, cities, offices, and oceans under varying lighting and weather conditions along with a diverse set of user-defined static and dynamic obstacles. The RealTHASC framework supports multiple autonomous and user-controlled agents, enabling complex online multi-agent control and coordination experiments. Example demonstrations of mixed policies implemented for the planning and control of both virtual and real robots are described in Section 3.5.
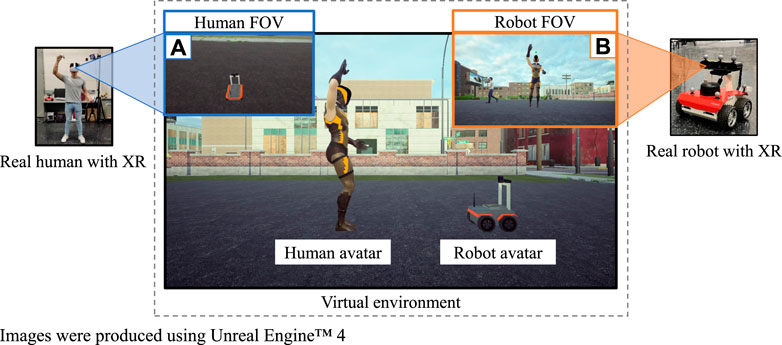
FIGURE 3. Visual perception of industrial city virtual environment in which the avatars of (A) human and (B) robot agents interact in real time.
Figure 4 shows the RealTHASC framework used to achieve real-time collaboration between real robots and humans via their avatars in a virtual environment developed in UE™. The blue arrows indicate how the kinematics of the real-world agents are communicated to their respective avatars while the orange arrows show how the perception feedback of these avatars is communicated to their real-world counterparts. Human operators in
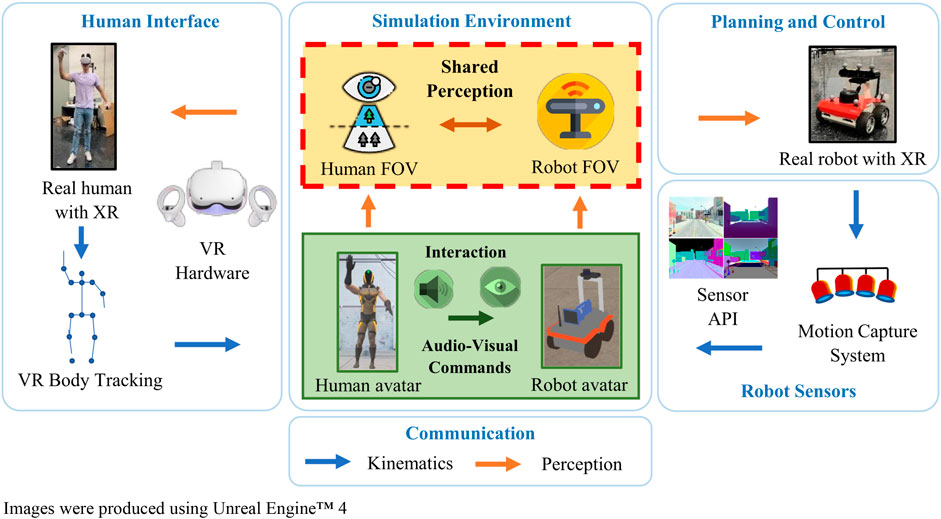
FIGURE 4. The RealTHASC framework enables research on human-autonomy interactions and collaborations by importing both human and robot avatars, with sensor suites, into complex and photorealistic simulation environments with perfect ground truth.
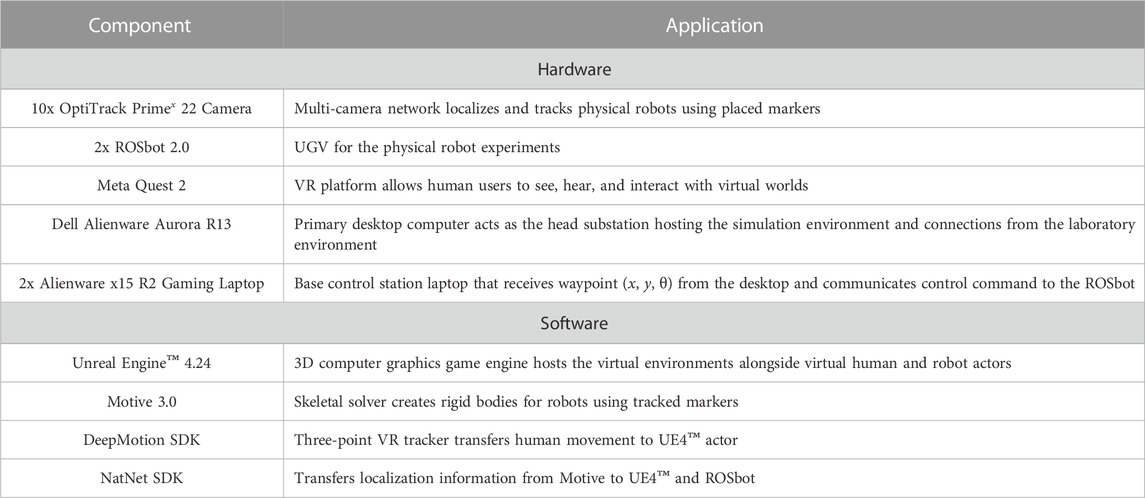
TABLE 1. Description of the hardware and software components used to build the RealTHASC facility.
3.1 RealTHASC UE™ simulation environment
In the RealTHASC facility, the UE™ simulation environment acts as the interface between the real and virtual agents. The UE™ software is chosen because it is currently considered as the most visually realistic tool for bridging the simulation-to-reality gap in perception-related tasks. The framework shown in Figure 1 leverages UE™ to support real-time rendering and manipulation of multiple programmable, photorealistic environments. The base environments used for the experiments presented in Section 4, namely, the industrial city (Figure 5A) and the undersea environment (Figure 5B), are obtained from the UE™ Marketplace. These base environments are modified to include virtual agents and digital avatars, to support their associated sensing modalities, and to stream data amongst various agents of the HATs (Section 3.4). The ability to programmatically manipulate environmental conditions such as fog, time of day, and luminosity, while difficult in real-world or laboratory physical experiments, is easily accomplished within RealTHASC. As a result, real humans and robots can interact with and test a broad range of environmental conditions known to influence visual perception and active control tasks.
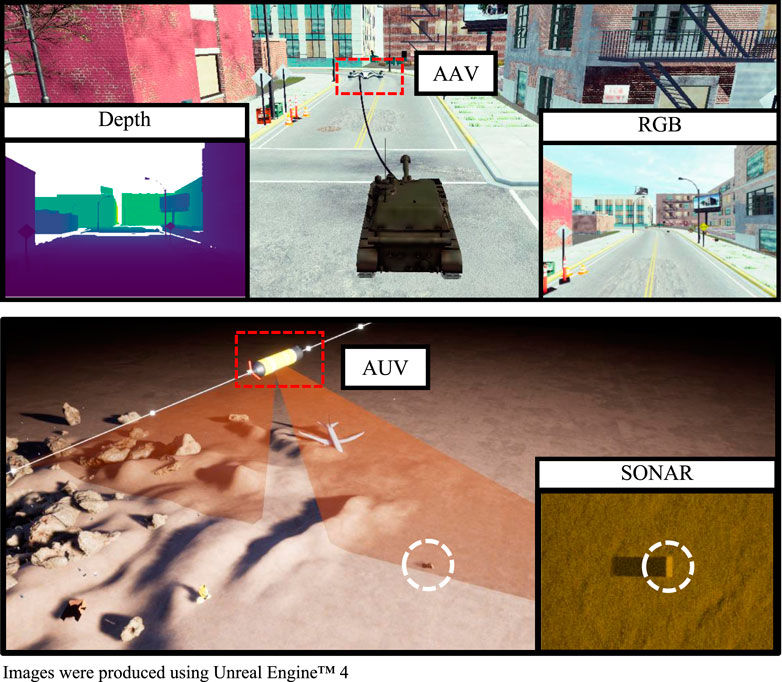
FIGURE 5. Virtual worlds, inclusive of autonomous robots, sensors, and artificial intelligence algorithms, are developed exclusively for RealTHASC using UE4™. Examples of these synthetic environments include (A) an industrial city monitored by an AAV equipped with onboard RGBD camera and (B) an underwater environment scanned by an AUV equipped with a side-scan sonar. © 2022 IEEE. Reprinted, with permission, from Shin et al. (2022a).
Digital avatars are created to resemble their real-world counterparts aesthetically, as required by the chosen experimental test or scenario, and also functionally by establishing a kinematic and sensing coupling with their real-world counterparts, as explained in Section 3.2 and Section 3.3. C++ programmable actors such as virtual robots, pedestrians, and mobile vehicles can be controlled offline using predefined trajectories or are equipped with simulated dynamics, perception, and control algorithms running online to test autonomy and collaboration algorithms with hardware or software-in-the-loop, as explained in Section 3.3 and Section 3.5 respectively. Two examples of such programmed actors with feedback controller-in-the-loop, an AAV and AUV, are shown in Figure 5. The AAV and AUV actors both sense their environment by the means of onboard RGBD camera and SONAR, respectively.
3.2 RealTHASC human interface
RealTHASC allows human operators to perceive and interact with synthetic environments and autonomous agents therein by synchronizing body movements with their avatars in real time. For instance, humans may need to react to robot motions and behaviors while also providing commands to their robot teammates in the HAT by means of semantics or hand gestures. Additionally, real robots and humans are able to interact with virtual humans and other human avatars in the UE™ world, allowing one to test collaborative tasks performed by larger HATs that may include real humans and robots at different geographic locations. Human avatars are simulated using the Meta Quest 2 hardware with a Steam VR backend. Using the VR headset, a real human (with XR) is able to view the rendered frames from the simulation environment and listen to audio, as sensed by the human avatar. This integration provides the user with an immersive, interactive first-person experience of the simulation environment. The headset and accompanying handheld controllers have trackers which communicate their positions over Wi-Fi to the system running Steam VR connected with UE™.
The DeepMotion SDK (DeepMotion, 2023) is used to transform this data into joint motions of a predefined skeleton of a human avatar, using three-point VR body tracking. By this approach, human operators inside the RealTHASC facility are able to control their virtual avatars without attaching any extra markers to the body with a mean latency of 10 ms. This facilitates real-time seamless kinematic coupling and interaction. The appearance of human avatars becomes crucial when testing algorithms trained on real-world data sets obtained from application-driven environments (e.g., offices and industrial workshops) or when using UE™-based worlds and simulations to produce synthetic datasets. In order to solve the problem of simulation-to-reality and reality-to-simulation transfer, a user interface is built using the UE™ Blueprint to easily modify and select between avatars of interest depending on the chosen domain or HAT application.
3.3 RealTHASC robot sensing
One of the main goals of RealTHASC is to enable research on active sensor systems used to gather, process, and communicate information about their operating environments to their encompassing and surrounding agents (Ferrari and Wettergren, 2021). The broad range of sensing modalities available on real and virtual robots play a pivotal role in allowing for many types of HAT collaborations to be synthesized inside the facility. RealTHASC hosts a unique array of proprioceptive sensors, measuring the ego state of the robot, and exteroceptive sensors, measuring the state of the operating environment. Husarion ROSbots, powered by ARM processors, are used as the UGV robot agents operating in
Various modalities for perception are developed by integrating sensor APIs from UnrealCV (Qiu and Yuille, 2016), traditional computer vision algorithms, and recent advances in sensor modeling. This integration enables the simulation of three-channel 8-bit data streams including RGB cameras, online panoptic segmentation, and surface normal estimation. One-channel (16-bit) images of ground truth depth are also acquired in real time using predefined depth cameras and stereo RGB cameras in UnrealCV. An online processing pipeline is defined to process RGB data streams from UnrealCV to generate 16-bit (two 8-bit channels) images of dense optical flow using the Farneback estimation algorithm and 8-bit (one-channel) grayscale images using OpenCV (Bradski, 2000). This work also incorporates the image-based side scan sonar simulation by Shin et al. (2022a) to simulate underwater sensing in these virtual environments created in UE™. This simulation incorporates visual approximations for acoustic effects such as back-scatter and acoustic shadow to provide a realistic rendering of sonar sensors. Novel modular C++ programmable robot agents are created in UE™ by interfacing the aforementioned sensors with robot avatars and virtual robots to enable robot perception in the simulation environment. A separate Python script has been created to enable these sensors to be used as static sensors monitoring the environment or to be programmed to move on predefined trajectories for data collection. Illustrative examples for the type of sensing modalities available in the simulation environment are shown in Figure 6. All the real robots (without avatars) sense the real workspace and are equipped with RP LIDAR A2 (laser range scanner), Orbecc Astra RGBD camera, and Time-of-Flight (TOF) sensors. The output of these sensors mounted on the real and virtual robots is communicated over ROS to robot planners (Section 3.5) running onboard for active perception tasks facilitating inter-agent interaction.
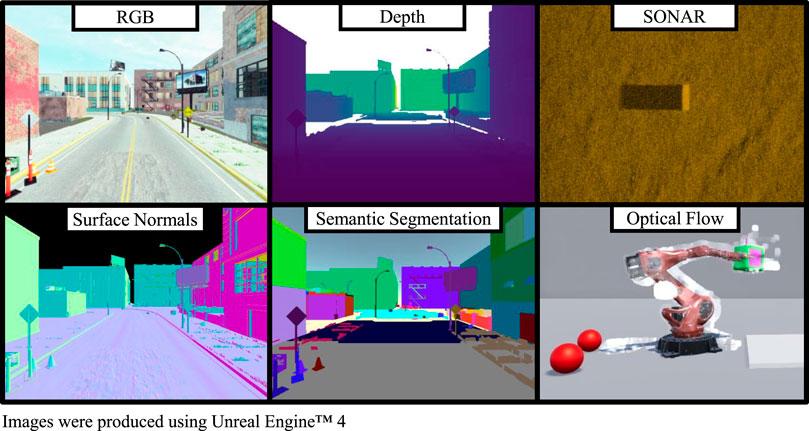
FIGURE 6. Examples of simulated sensing modalities and computer vision algorithms in RealTHASC. © 2022 IEEE. Reprinted, with permission, from Shin et al. (2022a).
3.4 Communication between the real and virtual workspace
The RealTHASC testbed hosts communication channels for message passing to facilitate inter-agent communication in and across the real and virtual workspace. An overview of the message-passing framework is described in Figure 7. An Alienware Aurora R13 system acts as the head substation that harbors communications from the OptiTrack motion capture cameras, hosts the virtual environment in UE™, and supports the VR tracking and associated hardware. As a result of the interactions between the agents in the virtual environment, the head substation generates desired waypoints for the robots based on the cooperation strategy employed. The waypoints intended for the robots in
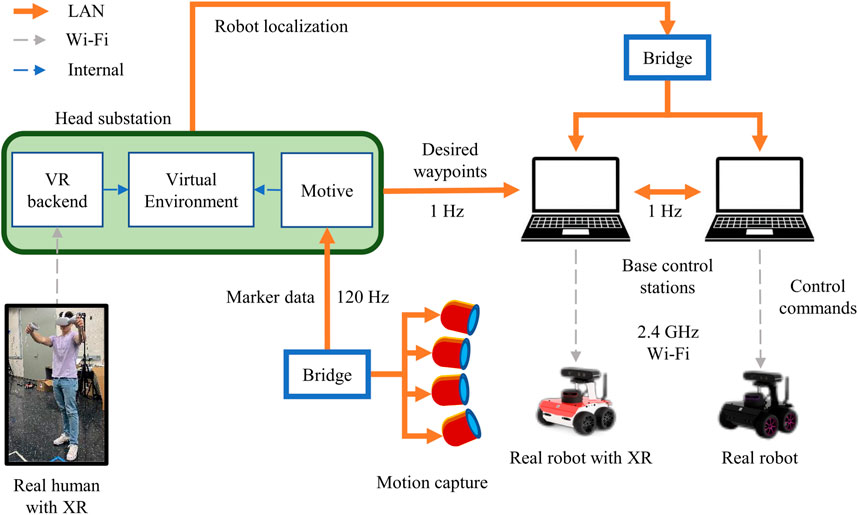
FIGURE 7. RealTHASC cyber-physical interfaces and communication pipelines enable seamless integration of real agents and applicable avatars in the virtual workspace.
The base control stations communicate with each other over a LAN connection using User Datagram Protocols (UDP) to simulate inter-robot communication in real time with low latency. Since the robots move in the real workspace, the OptiTrack motion capture cameras stream data packets comprising the marker data to the head substation through a bridge at a frequency of 120 Hz. Motive, a proprietary OptiTrack data processing software, then uses this marker data to infer the localization of user-specified rigid bodies defined as a collection of markers. This inferred robot localization is streamed over UDP channels to real robots through their base control stations for planning purposes and to the robot avatars in
3.5 Real-time robot planning and control
The ability to readily test and simulate collaborative planning and control algorithms for HAT research is demonstrated by implementing a waypoint-following policy on real and virtual robots in this testbed. For a robot i ∈ R operating in
where
4 Experiments
To convey the functionalities and capabilities of the RealTHASC facility, three experiments are conducted that each highlight different types of agent interactions across the real and virtual workspace. The first experiment focuses on human-robot interaction, the second experiment tests multi-robot teaming in and across real and virtual workspaces, and the third experiment showcases human-robot collaboration using synthetic sonar sensor simulation.
4.1 Human-robot perception and control
This experiment is designed to showcase interaction-based control of virtual robots and robot avatars using gesture commands from a human teammate. This demonstration takes place in the industrial city environment, built in UE™, hosting the following actors: a human avatar, a robot avatar, and a virtual robot. As shown in Figure 3, all agents perceive the virtual workspace using simulated RGB cameras. Human avatars communicate with the robot agents using gestures, as shown in Figure 8, to command the next waypoint. These gestures are detected by a real-time human-pose detection algorithm, OpenPose (Wei et al., 2016; Cao et al., 2017), implemented on each of the robot agents. Three distinct pose commands are communicated to the robot, which then moves in three different directions: left, forward, and right. These predefined commands can also be communicated to the robots as audio cues by using the Google Audio speech-to-text interface (Google LLC, 2022) running on the head substation. The real human with XR may utter any of these three predefined commands into the internal microphone of the VR headset, which is then transcribed to text. Based on the pose commands received as either visual or audio cues, the planner generates desired waypoints in the commanded direction. These waypoints are then streamed to the base control station of the real robot with XR (i.e., the real robot coupled with the robot avatar) over LAN and to the virtual robot in the environment as described in Section 3.4. The desired orientation at each set of waypoints manipulates the robots to face the human avatar in order to perceive the next gesture command. The waypoint-following policy, described in Section 3.5, is then used to calculate the control commands on each of the robot agents to reach their desired waypoint. This experiment is summarized using the schematic in Figure 9 for a virtual robot
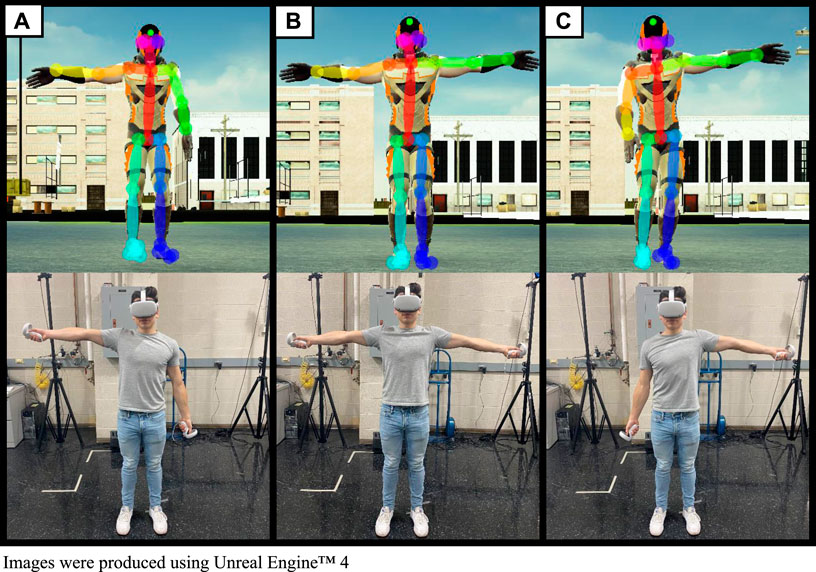
FIGURE 8. First-person perspective from a virtual autonomous UGV inside the industrial city, equipped with a virtual RGB camera and implementing OpenPose for keypoint detection (top row). The robot avatar is able to recognize and interpret the manual commands provided by a real human in
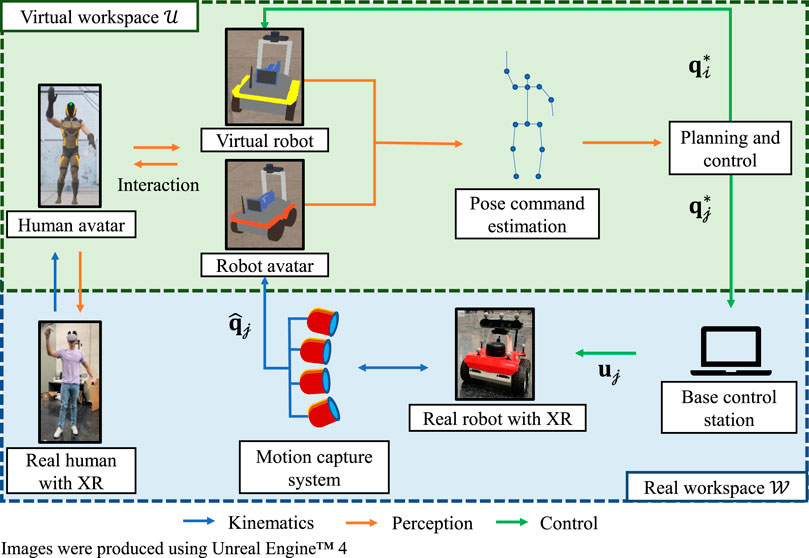
FIGURE 9. Human-robot collaboration is achieved by a human avatar, teleoperated by a real human with XR, commanding heading directions to the virtual robot
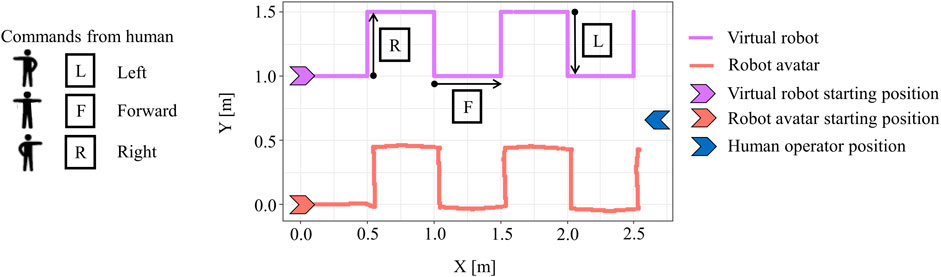
FIGURE 10. Trajectory results of the pose estimation experiment for human-robot interaction. A total of 10 pose commands are given to both the virtual robot and the robot avatar.
4.2 Multi-robot interaction for formation control
The second experiment is designed to illustrate closed-loop interaction and control between multiple robot agents listed in Figure 1: a virtual robot, a real robot with XR sensing in
The formation control experiment is illustrated in Figure 11, which features a multi-robot team comprising of a virtual robot
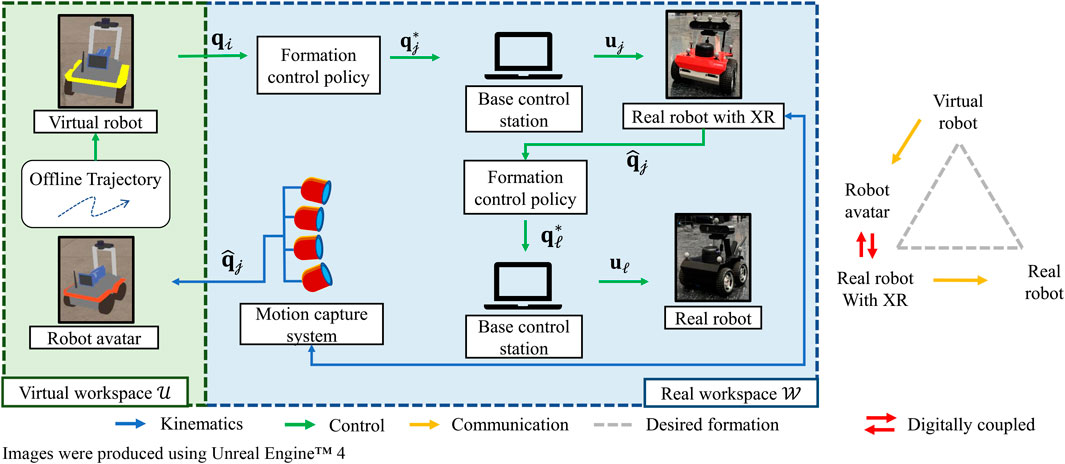
FIGURE 11. Leveraging the communication pipeline of RealTHASC, a virtual robot
The trajectories of the robot agents are plotted in Figure 12A. The virtual robot in UE™ follows the elliptical trajectory as designed, and the successful coupling between the real robot with XR and its virtual avatar can be observed. The robot team maintains the desired isosceles triangle formation throughout the experiment as illustrated in various instances in Figure 12A. Since the path of the leader and the desired formation have been predefined, the desired trajectories for all the robots are determined offline and the error between their positions during the experiment and these trajectories are recorded. High positional accuracy is achieved by both the agents as the largest positional error is within 0.10 m as shown in Figure 12B. This performance plot also shows that the second follower (real robot) consistently experiences lower positional accuracy when compared to the first follower (real robot with XR). This is attributed to the aggregation of errors due to the decentralized nature of coordination amongst the agents. These results successfully demonstrate the capability of this testbed to establish communication between various agents existing in the real and virtual workspace and, as a result, enable real-time interaction between real and simulated agents.
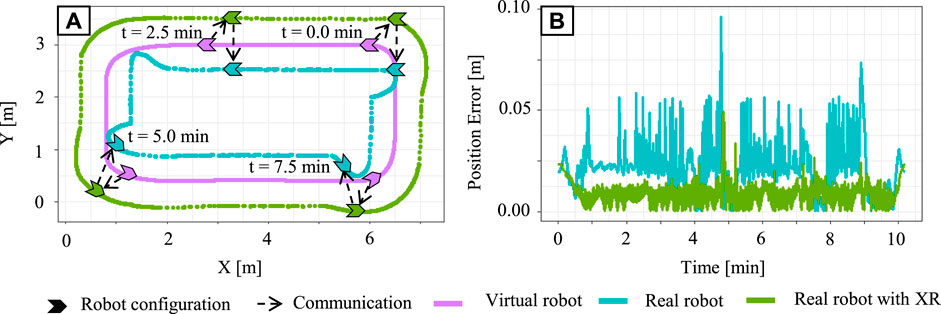
FIGURE 12. (A) Trajectory results of the leader-follower formation control experiment. The virtual robot is the leader, the real robot with XR is the first follower, and the real robot is the second follower. (B) The position error of each robot follower over the duration of the experiment.
4.3 Human-robot collaboration in underwater multi-target classification
This section aims to showcase a probable extension and direct application of the RealTHASC framework to intelligent vehicle systems commonly used in industrial and defense sectors, such as AUVs. Human operators collaborating with AUVs can help integrate their expertise, domain knowledge, and situational awareness, thus making these systems more robust, adaptive, and efficient. While testing underwater human-robot collaboration in the development phase can prove to be resource-intensive, testing underwater perception capability completely in simulation leads to inaccuracies when the simulation fails to incorporate environmental factors. Thus, the aim of this experiment is to augment the capabilities of the RealTHASC facility for testing collaborative multi-target classification in human-robot teams to overcome these challenges.
The undersea virtual environment hosted by RealTHASC consists of various seabed conditions as shown in Shin et al. (2022a). In this experiment, three different seabed conditions—namely sand ripples, mud, and rocks—are implemented. These seabed conditions are acquired from the UE™ Marketplace and modified using the Sculpt mode in UE™ editor to replicate the environmental conditions of the operation site. The synthetic sonar images are generated by setting a camera actor defined in UE™ to face downwards and adding a directional light from the side to mimic acoustic highlights and shadow patterns based on the orientation of the vehicle equipped with imaging sonar. Once the camera actor renders RGB images, the rendered images are then post-processed to convert RGB values into intensity values and to add realistic acoustic noises. This post-processing is conducted using MATLAB, which converts the input RGB image into a grayscale image and adds either Gaussian, speckle, or Poisson noise. An example of both an output RGB image from UE™ and post-processed synthetic sonar images are presented in Figure 13.
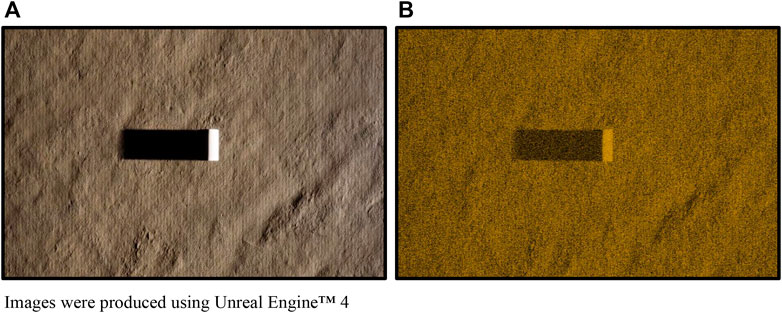
FIGURE 13. Synthetic sonar images taken from the simulation model presented in Shin et al., 2022a taken (A) before and (B) after post-processing with Gaussian white noise with mean 0 and variance of 0.05. © 2022 IEEE. Reprinted, with permission, from Shin et al. (2022a).
The synthetic images generated from this photorealistic simulation are then used to train an automatic target recognition (ATR) algorithm to classify targets in the images. In this experiment, three types of objects are used: cylinders, cubes, and spheres. A total of 1850 synthetic images are generated for the geometric targets: 650 for the cylinder, 600 for the cube, and 600 for the sphere. These images are generated with each type of object from various aspect angles to train acoustic highlight-shadow patterns, and a speckle noise with a variance of 0.1 is used in the post-processing. The ATR algorithm presented in Zhu et al. (2017), which uses a pre-trained AlexNet to extract feature vectors followed by a support vector machine (SVM) that is trained to perform the classification, is implemented in this experiment. A total of 80 images are used for training to avoid overfitting, and the remaining synthetic images are used for testing. Specifically, 21 images of a cylinder object, 27 images of a cube object, and 32 images of a sphere object are used for training the ATR algorithm. As a side note, the transfer learning performance of this ATR approach has been tested by images generated from a high-fidelity physics-based sonar simulation (Sammelmann et al., 1997) and presented in Shin et al. (2022a).
Underwater multi-target classification algorithms require multiple sonar images taken from different views to achieve a satisfactory confidence level before each object’s classification is declared (Chang et al., 2018). This classification confidence level is updated based on a sensor model represented in a Bayesian network whenever a new sonar image of each object is obtained. Leveraging RealTHASC alongside the aforementioned ATR approach, a human-robot collaboration experiment is proposed as a probable extension that may be used to test the effect of this collaboration on multi-target classification from sonar images. The confidence level (CL) and probabilistic sensor model used in the description of this experiment are explained in further detail in Chang et al. (2018); Shin et al. (2022b). The experiment is set up such that the AUV equipped with a side-scan sonar sensor in the virtual environment uses this target classification approach while constantly communicating with a remote human operator. The human operator is notified when the CL is higher than a user-chosen threshold (ɛCL), which is designed to be lower than the threshold to declare target classification. This setting allows the human operator to revise the sonar images and corresponding output from the ATR algorithm before the system declares a wrong classification. Moreover, the human operator does not need to go over every false alarm. The framework of the proposed experiment is illustrated in Figure 14. This demonstrates how the RealTHASC facility can also be used for human-robot interaction applications in remote environments.
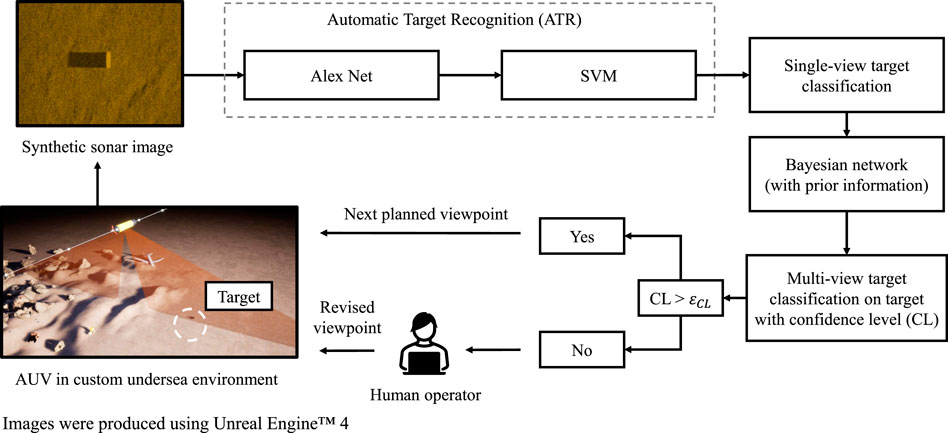
FIGURE 14. Example demonstrating human collaborating with an AUV equipped with automatic target recognition (ATR) algorithms and Bayesian network used for multi-target classification from images generated by the synthetic sonar simulator. © 2022 IEEE. Reprinted, with permission, from Shin et al. (2022a).
5 Conclusion
This paper presents RealTHASC, a multimodal cyber-physical XR facility that leverages state-of-the-art robotics, visualization tools, motion capture, and virtual reality technology to enable a novel experimental testbed interfacing physical and virtual worlds. Unreal Engine™ is used to create photorealistic simulated environments which facilitate interactions amongst human-autonomy teams (HATs), comprising of real agents, virtual agents, and agent avatars, tasked with achieving various objectives. These agent avatars operating in the virtual environment are teleoperated by the real agents with XR operating in a physical environment, thus sharing real-world dynamics, while the avatars grant simulated perception for planning and decision-making. Communication pipelines enable seamless interfacing of the real and virtual workspace in order to enable real-time collaboration amongst various agents in the HATs. The results of the three experiments demonstrate the capability of this system’s framework to effectively host highly flexible environments with interactive agents spanning a combination of both the real and virtual worlds. The first experiment focuses on establishing human-robot perception and effectively demonstrates closed-loop control of both virtual robots and real robots with coupled virtual avatars. Using body gestures or voice commands, the human operators effectively communicate commands with robot agents and control the trajectory of each agent in real time. With perception and control successfully established between the robots and humans in this testbed, the second experiment demonstrates that the developed facility is able to establish decentralized communication between varying robot agents. By implementing a leader-follower and formation control scenario on robot teams, this experiment effectively conveys the modality of RealTHASC to host real-time communication between the simulated and physical worlds and extends its reach to be used for multi-robot experiments. Finally, the third experiment shows the highly programmable nature of the sensors and virtual environments supported by the facility and their compatibility with the proposed human-AUV collaboration framework. Apart from such pre-deployment testing of collaboration algorithms, the RealTHASC facility can also be used as a closed-loop interaction interface to facilitate downstream tasks, such as online learning and data collection, for safety-critical applications including social navigation. Future work will extend the capabilities of this facility to include new interfaces for human operators such as haptic feedback devices and will leverage this facility to study 1) AI-supported teamwork in collaborative virtual environments, 2) decentralized AI-supported multi-agent planning and perception, 3) integration of emerging neuromorphic and insect-scale technologies, and 4) distributed sensing and control for very-large networks of agents.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Ethics statement
Ethical review and approval was not required for the study on human participants in accordance with the local legislation and institutional requirements. The patients/participants provided their written informed consent to participate in this study.
Author contributions
AP, SS, and SF contributed to the overall conception and design of the study. AP and SS took the lead in writing the manuscript. JM and AP designed and implemented the human-robot perception and control experiment. MG, JM, and SS designed the formation control for the multi-robot interaction experiment. VB wrote the code for executing the waypoint-following policy for the virtual robots. KJ, CL, and JD contributed to the integration of robot avatars in the simulation environment and implemented the waypoint following policy for the real robots. SQ contributed to the design of the industrial city virtual environment. JS designed the synthetic sonar simulator and implemented the automatic target recognition algorithm. SF was the principal investigator for this research. All authors contributed to the article and approved the submitted version.
Funding
This research was funded by the Office of Naval Research Defense University Research Instrumentation Program (DURIP) grant N00014-20-S-F004. AP was supported by the Cornell Engineering Colman Fellowship, by the Alfred P. Sloan Foundation grant G-2019-11435, and by the National Science Foundation (NSF) grant EFMA-2223811. SS was supported by the Office of Naval Research (ONR) grant N00014-22-1-2513. SF was supported by the National Science Foundation (NSF) grant EFMA-2223811.
Acknowledgments
The authors would like to thank Hewenxuan Li and Qingze Huo for their valuable feedback and comments provided during the writing and review process.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Bassyouni, Z., and Elhajj, I. H. (2021). Augmented reality meets artificial intelligence in robotics: A systematic review. Front. Robotics AI 8, 724798. doi:10.3389/frobt.2021.724798
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). “Realtime multi-person 2d pose estimation using part affinity fields,” in Proc. of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 1302–1310. doi:10.1109/CVPR.2017.143
Chang, S., Isaacs, J., Fu, B., Shin, J., Zhu, P., and Ferrari, S. (2018). “Confidence level estimation in multi-target classification problems,” in Proc. of the Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXIII (SPIE) 10628, 458–464. doi:10.1117/12.2319988
Chen, J., Gauci, M., Li, W., Kolling, A., and Groß, R. (2015). Occlusion-based cooperative transport with a swarm of miniature mobile robots. IEEE Trans. Robotics 31, 307–321. doi:10.1109/TRO.2015.2400731
Choi, H., Crump, C., Duriez, C., Elmquist, A., Hager, G., Han, D., et al. (2021). On the use of simulation in robotics: opportunities, challenges, and suggestions for moving forward. Proc. Natl. Acad. Sci. 118, e1907856118. doi:10.1073/pnas.1907856118
DeepMotion (2023). DeepMotion SDK - virtual reality tracking. Available at: https://www.deepmotion.com/virtual-reality-tracking.
Deitke, M., Han, W., Herrasti, A., Kembhavi, A., Kolve, E., Mottaghi, R., et al. (2020). “Robothor: an open simulation-to-real embodied ai platform,” in 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 3161–3171. doi:10.1109/CVPR42600.2020.00323
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and Koltun, V. (2017). “Carla: an open urban driving simulator,” in Proc. of the 1st Annual Conference on Robot Learning, 1–16.
Epic Games (2019). Unreal engine. Available at: https://www.unrealengine.com/en-US/.
Erez, T., Tassa, Y., and Todorov, E. (2015). “Simulation tools for model-based robotics: comparison of bullet, havok, MuJoCo, ODE and PhysX,” in Proc. of the 2015 IEEE International Conference on Robotics and Automation (ICRA) (IEEE), 4397–4404. doi:10.1109/ICRA.2015.7139807
Fong, T., Nourbakhsh, I., and Dautenhahn, K. (2003). A survey of socially interactive robots. Robotics Aut. Syst. 42, 143–166. doi:10.1016/S0921-8890(02)00372-X
Garg, G., Kuts, V., and Anbarjafari, G. (2021). Digital twin for fanuc robots: industrial robot programming and simulation using virtual reality. Sustainability 13, 10336. doi:10.3390/su131810336
Gemerek, J., Ferrari, S., Wang, B. H., and Campbell, M. E. (2019). Video-guided camera control for target tracking and following. IFAC-PapersOnLine 51, 176–183. doi:10.1016/j.ifacol.2019.01.062
Google LLC (2022). Google cloud speech API. Available at: https://cloud.google.com/speech-to-text/docs/.
Guerra, W., Tal, E., Murali, V., Ryou, G., and Karaman, S. (2019). “Flightgoggles: photorealistic sensor simulation for perception-driven robotics using photogrammetry and virtual reality,” in Proc. of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE), 6941–6948. doi:10.1109/IROS40897.2019.8968116
Hu, J., and Lanzon, A. (2018). An innovative tri-rotor drone and associated distributed aerial drone swarm control. Robotics Aut. Syst. 103, 162–174. doi:10.1016/j.robot.2018.02.019
Inamura, T., and Mizuchi, Y. (2021). Sigverse: A cloud-based vr platform for research on multimodal human-robot interaction. Front. Robotics AI 8, 549360. doi:10.3389/frobt.2021.549360
Kao, W.-W. (1991). “Integration of gps and dead-reckoning navigation systems,” in Proc. Of the vehicle navigation and information systems conference, 1991 (IEEE), 2, 635–643. doi:10.1109/VNIS.1991.205808
Koenig, N., and Howard, A. (2004). “Design and use paradigms for gazebo, an open-source multi-robot simulator,” in Proc. Of the 2004 IEEE/RSJ international conference on intelligent robots and systems (IROS)(IEEE cat. No. 04CH37566) (IEEE), 3, 2149–2154. doi:10.1109/IROS.2004.1389727
Krajník, T., Nitsche, M., Faigl, J., Vaněk, P., Saska, M., Přeučil, L., et al. (2014). A practical multirobot localization system. J. Intelligent Robotic Syst. 76, 539–562. doi:10.1007/s10846-014-0041-x
Liu, R., Natarajan, M., and Gombolay, M. C. (2021). Coordinating human-robot teams with dynamic and stochastic task proficiencies. ACM Trans. Human-Robot Interact. (THRI) 11, 1–42. doi:10.1145/3477391
Michel, O. (2004). Cyberbotics ltd. WebotsTM: professional mobile robot simulation. Int. J. Adv. Robotic Syst. 1, 5. doi:10.5772/5618
Mizuchi, Y., and Inamura, T. (2017). “Cloud-based multimodal human-robot interaction simulator utilizing ROS and Unity frameworks,” in 2017 IEEE/SICE international symposium on system integration (SII) (IEEE), 948–955. doi:10.1109/SII.2017.8279345
Murnane, M., Higgins, P., Saraf, M., Ferraro, F., Matuszek, C., and Engel, D. (2021). “A simulator for human-robot interaction in virtual reality,” in 2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW) (IEEE), 470–471. doi:10.1109/VRW52623.2021.00117
Naghsh, A. M., Gancet, J., Tanoto, A., and Roast, C. (2008). “Analysis and design of human-robot swarm interaction in firefighting,” in Proc. Of RO-MAN 2008-the 17th IEEE international symposium on robot and human interactive communication (IEEE), 255–260. doi:10.1109/ROMAN.2008.4600675
Nourbakhsh, I. R., Sycara, K., Koes, M., Yong, M., Lewis, M., and Burion, S. (2005). Human-robot teaming for search and rescue. IEEE Pervasive Comput. 4, 72–78. doi:10.1109/MPRV.2005.13
Ognibene, D., Foulsham, T., Marchegiani, L., and Farinella, G. M. (2022). Editorial: active vision and perception in human-robot collaboration. Front. Neurorobotics 16, 848065. doi:10.3389/fnbot.2022.848065
Oh, J., Howard, T. M., Walter, M. R., Barber, D., Zhu, M., Park, S., et al. (2017). “Integrated intelligence for human-robot teams,” in Proc. Of the 2016 international symposium on experimental robotics (Springer), 309–322. doi:10.1007/978-3-319-50115-4_28
Pendleton, S. D., Andersen, H., Du, X., Shen, X., Meghjani, M., Eng, Y. H., et al. (2017). Perception, planning, control, and coordination for autonomous vehicles. Machines 5, 6. doi:10.3390/machines5010006
Puig, X., Ra, K., Boben, M., Li, J., Wang, T., Fidler, S., et al. (2018). “Virtualhome: simulating household activities via programs,” in 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 8494–8502. doi:10.1109/CVPR.2018.00886
Qiu, W., and Yuille, A. (2016). “Unrealcv: connecting computer vision to unreal engine,” in Proc. Of the computer vision – ECCV 2016 workshops (Springer International Publishing), 909–916. doi:10.1007/978-3-319-49409-8_75
Reiners, D., Davahli, M. R., Karwowski, W., and Cruz-Neira, C. (2021). The combination of artificial intelligence and extended reality: A systematic review. Front. Virtual Real. 2, 721933. doi:10.3389/frvir.2021.721933
Sammelmann, G. S., Fernandez, J. E., Christoff, J. T., Vaizer, L., Lathrop, J. D., Sheriff, R. W., et al. (1997). “High-frequency/low-frequency synthetic aperture sonar,” in Proc. of the Detection and Remediation Technologies for Mines and Minelike Targets II (SPIE) 3079, 160–171. doi:10.1117/12.280850
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2018). “Airsim: high-fidelity visual and physical simulation for autonomous vehicles,” in Proc. of the Field and Service Robotics: Results of the 11th International Conference (Springer), 621–635. doi:10.1007/978-3-319-67361-5_40
Shen, B., Xia, F., Li, C., Martín-Martín, R., Fan, L., Wang, G., et al. (2021). “Igibson 1.0: A simulation environment for interactive tasks in large realistic scenes,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 7520–7527. doi:10.1109/IROS51168.2021.9636667
Shin, J., Chang, S., Bays, M. J., Weaver, J., Wettergren, T. A., and Ferrari, S. (2022a). “Synthetic sonar image simulation with various seabed conditions for automatic target recognition,” in Proc. Of the OCEANS 2022, hampton roads (IEEE), 1–8. doi:10.1109/OCEANS47191.2022.9977275
Shin, J., Chang, S., Weaver, J., Isaacs, J. C., Fu, B., and Ferrari, S. (2022b). Informative multiview planning for underwater sensors. IEEE J. Ocean. Eng. 47, 780–798. doi:10.1109/JOE.2021.3119150
Škulj, G., Malus, A., Kozjek, D., Selak, L., Bračun, D., Podržaj, P., et al. (2021). An architecture for sim-to-real and real-to-sim experimentation in robotic systems. Procedia CIRP 104, 336–341. doi:10.1016/j.procir.2021.11.057
Spurnỳ, V., Báča, T., Saska, M., Pěnička, R., Krajník, T., Thomas, J., et al. (2019). Cooperative autonomous search, grasping, and delivering in a treasure hunt scenario by a team of unmanned aerial vehicles. J. Field Robotics 36, 125–148. doi:10.1002/rob.21816
Wei, S.-E., Ramakrishna, V., Kanade, T., and Sheikh, Y. (2016). “Convolutional pose machines,” in Proc. of the IEEE conference on Computer Vision and Pattern Recognition, 4724–4732. doi:10.1109/CVPR.2016.511
Keywords: robotics, virtual reality, human-autonomy teams, simulation systems, human-robot interaction, multi-robot communication, simulation-to-reality gap, artificial intelligence
Citation: Paradise A, Surve S, Menezes JC, Gupta M, Bisht V, Jang KR, Liu C, Qiu S, Dong J, Shin J and Ferrari S (2023) RealTHASC—a cyber-physical XR testbed for AI-supported real-time human autonomous systems collaborations. Front. Virtual Real. 4:1210211. doi: 10.3389/frvir.2023.1210211
Received: 21 April 2023; Accepted: 07 July 2023;
Published: 04 December 2023.
Edited by:
Dioselin Gonzalez, Independent Researcher, United StatesReviewed by:
Federico Manuri, Polytechnic University of Turin, ItalyBill Pike, United States Army, United States
Copyright © 2023 Paradise, Surve, Menezes, Gupta, Bisht, Jang, Liu, Qiu, Dong, Shin and Ferrari. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Silvia Ferrari, ZmVycmFyaUBjb3JuZWxsLmVkdQ==
†These authors have contributed equally to this work and share first authorship