 Marco A. Bühler1,2*
Marco A. Bühler1,2* Sean D. Lynch2,3Trineta M. Bhojwani2,3Ahlam Zidan2,3Félix Fiset4,5
Sean D. Lynch2,3Trineta M. Bhojwani2,3Ahlam Zidan2,3Félix Fiset4,5 Bradford J. McFadyen4,5
Bradford J. McFadyen4,5 Anouk Lamontagne1,2,3
Anouk Lamontagne1,2,3- 1Integrated Program in Neuroscience, McGill University, Montreal, QC, Canada
- 2Jewish Rehabilitation Hospital-CISSS de Laval Site of the Centre for Interdisciplinary Research in Rehabilitation of Greater Montreal, Laval, QC, Canada
- 3School of Physical and Occupational Therapy, McGill University, Montreal, QC, Canada
- 4Centre for Interdisciplinary Research in Rehabilitation and Social Integration de la Capitale Nationale, Laval, QC, Canada
- 5Département de réadaptation, Université Laval, Laval, QC, Canada
To combat the COVID-19 pandemic, governments around the world have proposed a series of mitigation strategies. While responses varied across different governing bodies, recommendations such as social distancing and the use of surgical masks were nearly universal. These recommendations, as well as the social anxiety that emerged during the pandemic, are likely to have influenced pedestrian interactions. In this study, we have examined the effect of surgical masks on locomotor circumvention strategies in response to virtual pedestrians. We further explored the relationship between measures of obstacle clearance and feelings of anxiety related to community ambulation in the context of the pandemic. Using virtual reality, locomotor circumvention strategies in response to approaching pedestrians with and without surgical masks were measured in a sample of 11 healthy young individuals. Additionally, a questionnaire was developed and used to gain insights into participants’ behaviours during and after a strict period of restrictions that were in effect before the summer of 2020. Results showed that participants maintained a larger clearance when virtual pedestrians wore a surgical mask. Furthermore, clearance was positively associated with anxiety toward community ambulation in the context of the pandemic. Our findings provide evidence that mask-wearing elicits an increase in physical distancing during pedestrian interactions. Furthermore, results indicate that social context and mental health status influence locomotor outcomes measured in the context of a pedestrian interaction task and highlight the potential of virtual reality simulations to study locomotion in the community setting.
1 Introduction
In December 2019 the novel coronavirus (i.e., COVID-19) gave rise to a global pandemic (Anand et al., 2020). Over the following years, the world continued to be confronted with multiple waves of coronavirus infections. To curb the community’s spread of the virus, governments around the globe incorporated various health and safety guidelines. While most guidelines varied across country and state governments, recommendations such as hand washing, social distancing, and wearing a surgical mask were widely promoted. Considering that direct contact, indirect contact, respiratory droplets, and aerosol particles are likely to be the principal modes of transmission (Ehsanifar, 2021; Leung, 2021), these recommendations are practical and effective methods to decrease the likelihood of transmission from infected to non-infected individuals (Chu et al., 2020; Eikenberry et al., 2020).
Despite the restrictions implemented throughout the pandemic, walking in community environments and interactions with other pedestrians remained an essential part of everyday life. In the context of the COVID-19 pandemic, these interactions are a matter of public interest. The reason behind this assertion is that any factor that leads to a smaller or larger proximity between pedestrians would influence the likelihood of transmission (Chu et al., 2020; Eikenberry et al., 2020; Seres et al., 2020; Jorgensen et al., 2021; Luckman et al., 2021; Liebst et al., 2022). Previous research in the proxemics field has described several personal, social, and situational factors that influence interpersonal distances maintained between pedestrians (Hayduk, 1983). For instance, personal factors include impaired sensorimotor functions such as those incurred by older age or stroke, which were shown to result in slower walking speeds, larger safety margins, and increased risk of collision during obstacle circumvention (Gerin-Lajoie et al., 2006; Darekar et al., 2017). Additional interpersonal distance modulations have been observed during interactions with pedestrians of different sizes (Bourgaize et al., 2021) and when avoiding a robot as opposed to another pedestrian (Vassallo et al., 2018). Finally, studies have shown that avoidance strategies differ depending on situational factors such as the direction of obstacle approach (Basili et al., 2013; Huber et al., 2014; Souza Silva et al., 2018) and whether one assumes a passive or active role during the interaction (Olivier et al., 2013).
In the context of the COVID-19 pandemic, it is reasonable to assume that adherence to the health and safety guidelines and the fear of contracting the disease have influenced the interactions between pedestrians (Harper et al., 2021). Indeed, there was a concern that when wearing a surgical mask to mitigate the risk of infection, pedestrians would maintain smaller interpersonal distances by engaging in risk-compensation behaviours (i.e., by adopting one safety measure, feelings of threat would decrease and lead to more risky behaviours) (Jorgensen et al., 2021; Liebst et al., 2022). Using a nationwide survey, Jorgensen, Lindholt (Jorgensen et al., 2021) attempted to characterize risk compensation in the Danish population. While the authors did not observe widespread risk-compensating behaviours, they highlighted that surgical masks may result in reduced attention to physical distancing (Jorgensen et al., 2021). In agreement with the latter study, two internet-based experiments reported similar findings (Cartaud et al., 2020; Luckman et al., 2021). In these experiments, participants were asked to indicate the distance they would maintain from a virtual human-like character with or without a surgical mask when engaging in social interactions (Cartaud et al., 2020), or the distance they would maintain from a stranger in different everyday scenarios (Luckman et al., 2021). In line with the risk-compensation hypothesis, participants indicated smaller distances when the characters wore a surgical mask (Cartaud et al., 2020; Luckman et al., 2021). Conversely, an analysis of video footage from two Dutch cities where experiments measured whether individuals were within a 1.5 m radius of a stranger, did not show a significant decrease in social distancing with the use of surgical masks (Liebst et al., 2022). Lastly, when measuring the total distance maintained from an experimenter standing in line outside a local business (Seres et al., 2020) or the minimum distance maintained from an experimenter walking along a sidewalk (Marchiori, 2020), larger interpersonal distances were observed in conditions when experimenters wore a surgical mask. Interestingly, a subsequent survey showed that masked individuals were not perceived as being more likely to transmit COVID-19 when compared to their unmasked counterparts (Seres et al., 2020). Instead, participants reported perceiving masked individuals as more likely to prefer larger a interpersonal space (Seres et al., 2020). Altogether, studies that used self-reported measures suggest that mask-wearing favors risk-compensation behaviors while observational and experimental studies indicate that participants maintain larger interpersonal distances when engaging with masked individuals. Furthermore, while the current literature supports that mask-wearing has an impact on interpersonal distances in one way or another, the extent to which it modulates walking adjustments performed during pedestrians’ interactions remains to be elucidated.
Mental health status is another factor that may influence locomotor behaviours. Before the pandemic, evidence suggests that individuals with a higher degree of social anxiety prefer larger interpersonal distances when approached by a virtual human (Perry et al., 2013). Whether the high prevalence of adverse mental health symptoms such as fear and anxiety observed during the COVID-19 pandemic (Xiong et al., 2020) has influenced pedestrian interactions and led to larger interpersonal distancing remains unclear.
Several biomechanical measures are used to better understand the complex nature of pedestrian interactions in community settings. These measures describe walking trajectory, relative distances, walking speed, and even gaze behaviour (Gerin-Lajoie et al., 2005; Huber et al., 2014; Boulanger and Lamontagne, 2017; Bourgaize et al., 2021). Extracting these measures under ecological yet safe and controlled conditions is very challenging. To address these limitations, virtual reality (VR) has been used as an experimental tool and recent investigations have shown that it can yield locomotor responses during obstacle avoidance that are similar to those observed in the real world (Olivier et al., 2014; Buhler and Lamontagne, 2018; Buhler and Lamontagne, 2019). Considering that VR allows an in-depth analysis of pedestrian interactions, we proposed this study to examine the extent to which mask-wearing affects locomotor adjustments performed when circumventing another pedestrian. Additionally, we explored the relationship between outcomes describing participants’ obstacle avoidance strategies and self-reported levels of frequency of walking in the community and anxiety associated with the COVID-19 pandemic. Therefore, we used an immersive VR set-up allowing for gaze and body movement recording to examine the avoidance strategies adopted by healthy young individuals during interactions with virtual pedestrians (VRPs) with and without a surgical mask. We hypothesized that participants would maintain larger clearances around the VRPs wearing surgical masks. This larger clearance would be reflected by larger minimum distances with respect to the VRP, larger maximum deviations, and trajectory deviations would be initiated at larger distances from the VRP. We further hypothesized that longer fixations on the body and the head of the VRP would be observed in the masked condition.
2 Materials and methods
2.1 Participants
To answer our research questions, we recruited a convenience sample comprised primarily of university students over the period between July 2020 and September 2020, which was right after the first wave of the pandemic in Montreal, Canada. This period was selected a priori and while it did result in a small sample size, it also ensured that recruitment was not affected by major changes in public health measures that could occur after the end of the summer term. Participants were offered monetary compensation for traveling to the research lab and parking fees. In total, eleven healthy young individuals (sex = 6 female and 5 males, age = 25.45 ± 2.54 years, mass = 65.05 ± 10.79 kg, height = 167.73 ± 7.30 cm) agreed to participate in this study. All participants were right-handed as per the Edinburgh Handedness Inventory (Oldfield, 1971), had normal or corrected-to-normal visual acuity according to the EDTRS eye chart (Kaiser, 2009), and had intact cognitive function (score ≥26 on the Montreal Cognitive Assessment). Exclusion criteria included conditions that could interfere with locomotion, as well as a positive test for COVID-19, contact with someone who tested positive for COVID-19 or traveling outside the country within 2 weeks before data collection. Written informed consent was obtained from all participants before data collection and the study was approved by the Research Ethics Board in Rehabilitation and Physical Disability of the CIUSSS du Centre-Sud-de-l’Île-de-Montréal.
2.2 Experimental setup and procedure
This study employed a repeated-measure experimental design. Data for each participant were collected in one session at the Virtual Reality and Mobility Laboratory of the Jewish Rehabilitation Hospital-CISSS-Laval between the 10th of July and the 25th of September 2020.
Participants were assessed while walking overground and immersed in a virtual environment representing a local subway station (Figure 1). The obstacle avoidance task involved circumventing a VRP that could approach from different directions. The layout of the experiment was designed around a theoretical point of collision (TPC). This point was used to define the participant and VRPs’ initial positions. On one side of the virtual scene, the participant’s initial position was set at 3.5 m from the TPC. On the opposite side, three female VRPs stood in an arc fashion at 3 m from the same point. This “arc” was created by placing avatars at 0° (straight ahead) as well as 30° to the left and right of the TPC.
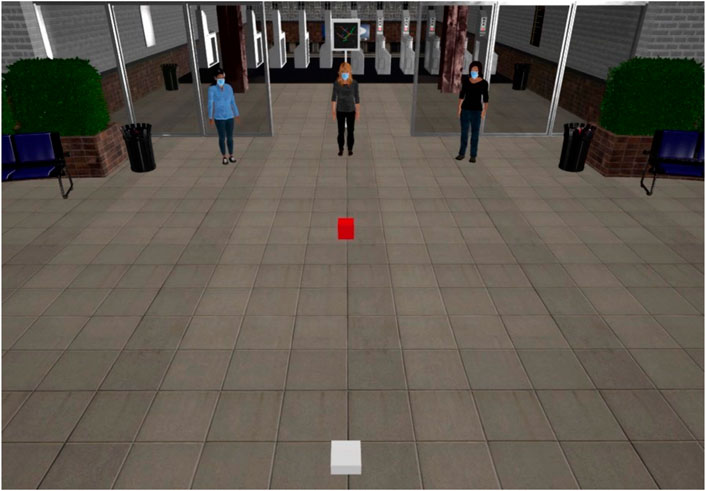
FIGURE 1. Perspective view of the virtual environment. At the start of each trial, participants stood at the initial position (white cube) facing three VRPs standing in front of a subway station entrance. The TPC (red cube), while invisible to the participant, illustrates the point at which a collision would occur if no walking adjustments were performed.
The experiment was comprised of 3 different trial types (experimental, catch, and control trials). In experimental trials, as the participant reached 0.5 m of forward walking, one of the three VRPs started to walk towards the TPC while the others took one step forward and then walked away. This arrangement created three possible directions of VRP approach (left, middle, or right). In catch trials, all VRPs took one step forward and walked away. In control trials, the environment was devoid of VRPs. The purpose of catch trials was to reduce task predictability while that of control trials was to provide a measurement of walking speed and walking trajectory in the absence of interferers. During each trial, text messages informed participants of the time to start (“Go”) and stop walking (“Stop”), as well as any collision with the approaching VRP (“Collision”). Participants were instructed to walk straight ahead toward the subway map, presented in the far space, and to avoid a collision with an approaching VRP, if any.
Participants performed two blocks of trials, one block with VRPs not wearing a mask and one block with the same VRPs wearing a mask (Figure 2). As this study was integrated into an ongoing project that was initiated before the pandemic, participants always performed the mask-free block before, and the block with surgical masks was included after all trials for the other project were completed. Furthermore, participants were not aware that there would be trials with masked avatars. Each block is comprised of 30 trials, that is 18 experimental trials (6 × 3 directions), 6 catch trials, and 6 control trials, presented in random order.
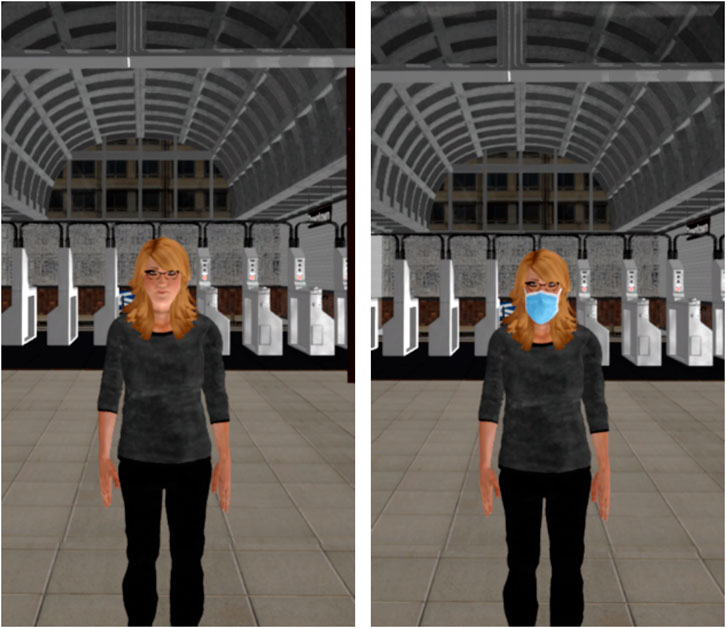
FIGURE 2. Example of a virtual pedestrian (VRP). Unmasked VRP is shown on the left and masked VRP is shown on the right.
The VRPs and environment were created in Autodesk Maya™ and controlled using the Unreal engine® 4.24. They were visualized through an immersive head-mounted display (HMD) with an integrated eye-tracking system (HTC Vive Pro Eye). Participants’ head and eye positions were recorded from the HMD at 90 Hz and used to compute obstacle circumvention measures. The VRPs were animated using motion-captured data of three different actors and walked at an approximate speed of 1.39 m/s, which is a typical average walking speed for healthy young adults (Bohannon, 1997).
2.3 Data analysis
2.3.1 Obstacle circumvention measures
The following outcomes were selected to describe clearance adaptations. Minimum distance was defined as the smallest distance maintained between the participant’s position and the VRP’s sternum. Onset distance was obtained by first computing the point where the participant’s mediolateral displacement was larger than what was observed in control trials and from this point, we obtained the first preceding point where the participant’s mediolateral speed was equal to zero. Subsequently, onset distance was defined as the distance between the participant and VRP at this point. Additionally, in trials in which an onset distance was obtained, maximum deviation was calculated as the maximum mediolateral displacement preceding the point of interferer crossing.
To characterize the participant’s speed adaptations, we obtained the first point after the participant’s initial acceleration. This point was defined as the first segment after the first step at which forward acceleration was equal to or lower than zero. Subsequently, from this point and up to the point of VRP crossing, the minimum, average, and maximum walking speeds were extracted. Lastly, outcomes characterizing gaze behaviour were calculated as the percentage of the time, from the 0.5 m of forward displacement and up to the point of VRP crossing, during which participants were fixating their gaze on the head or body segments of the approaching VRP. We also measured the duration of gaze fixations on body segments of the other VRPs.
2.3.2 Questionnaires
Questionnaires were administered after the obstacle avoidance assessment. A single-item presence questionnaire was employed to measure participants’ feeling of presence in VR (Bouchard et al., 2004). Answers to this questionnaire are rated on a 0–10 scale, with higher values indicating a stronger feeling of presence in VR. Participants also responded to a custom-made, 19-item questionnaire on community walking behavior and related anxiety during the COVID-19 pandemic (Table 1). The first 8 questions explored participant’s activities during and after the confinement period and had the following response options: 6–7 days a week (3 points); 3–5 days a week (2 points); 1–3 days a week (1 point); never (0 points). Questions 9 to 14 evaluated the person’s level of anxiety associated with walking in community environments. The remaining questions 15−19 provided information on the level of anxiety when interacting with virtual vs real humans, the extent to which participants complied with the government’s confinement measures, whether they had previous exposure to COVID-19 and known contact(s) with someone who has been diagnosed with COVID-19. The last question asked if, after the start of the pandemic, they adopted larger interpersonal distances when passing another person on the street. Scores from different sections were added together to create a score for the frequency of community walking during (questions 1–3) and after (questions 5–6) the confinement periods, as well as a total anxiety score (questions 9, 11, and 10).
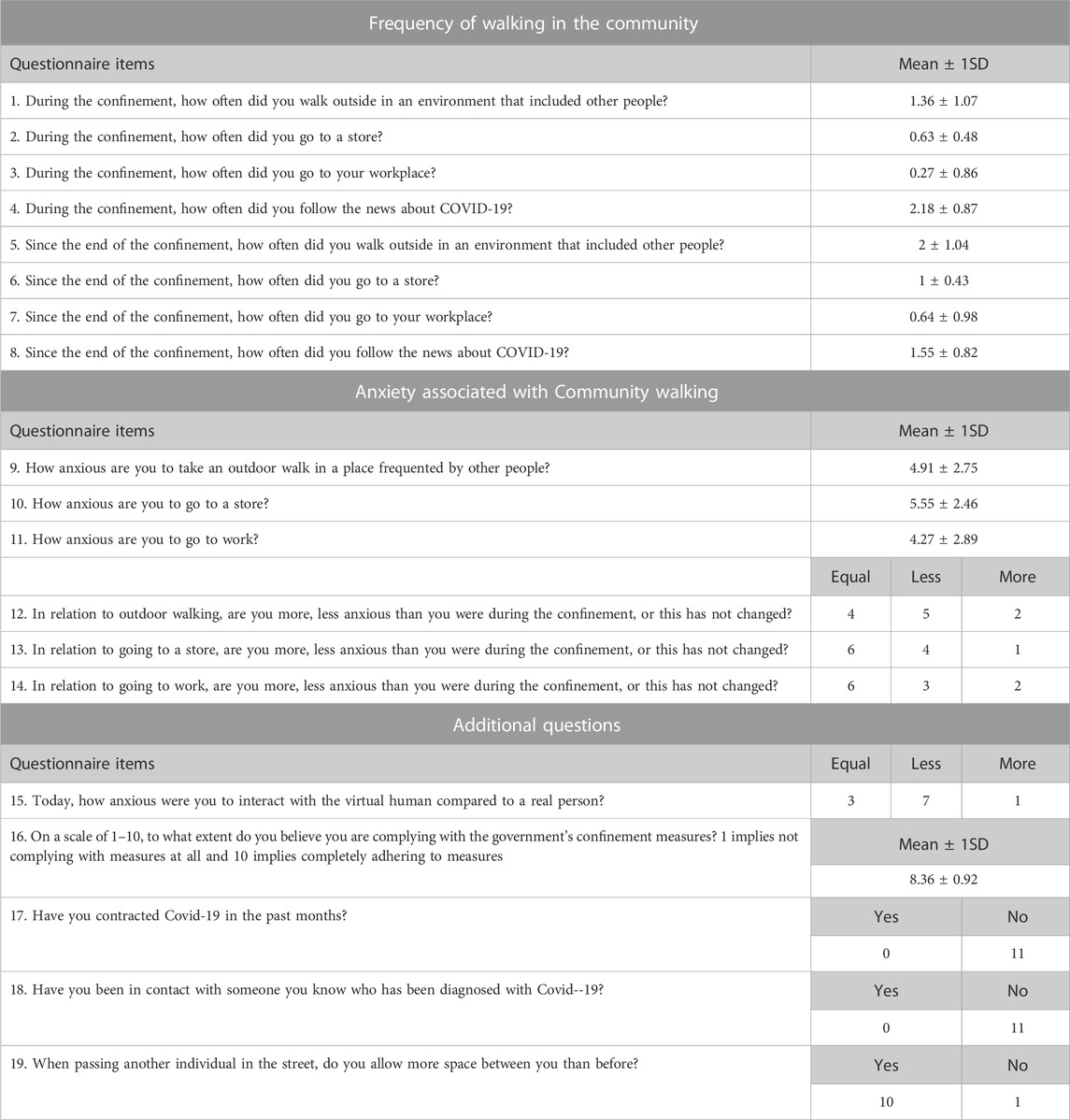
TABLE 1. Custom-made questionnaire on community walking behaviour and anxiety related to the COVID-19 pandemic. List of questions that were used to measure the frequency of community walking during and after the confinement period, and self-reported anxiety related to community walking. For Q1 to Q8, maximum scores are 3. Ten is the maximum score for Q9 to Q11. Mean ± 1SD values are shown for continuous outcomes and counts for categorical measures.
2.4 Statistical analysis
Differences in the different locomotor outcomes across conditions were examined using a generalized estimating equation (GEE) model. The model was built using SAS 9.4 and was comprised of two within-subject factors: surgical mask use (mask and no mask), and direction of obstacle approach (left, middle, and right). An exchangeable correlation structure was used to account for within-subject correlations and the significance level was set to ρ < 0.05. In the case of multiple comparisons, they were adjusted using the Bonferroni procedure. Finally, the Pearson correlation was used to determine the relationship between the sum of anxiety scores from the custom-made questionnaire related to COVID-19 and locomotor outcomes of minimum distance and onset distance.
3 Results
Traces representing participants’ walking trajectories from the sample are displayed in Figure 3. From these graphics, it can be observed that in the presence of a surgical mask, mediolateral path deviations seem to start earlier and reach larger magnitudes.
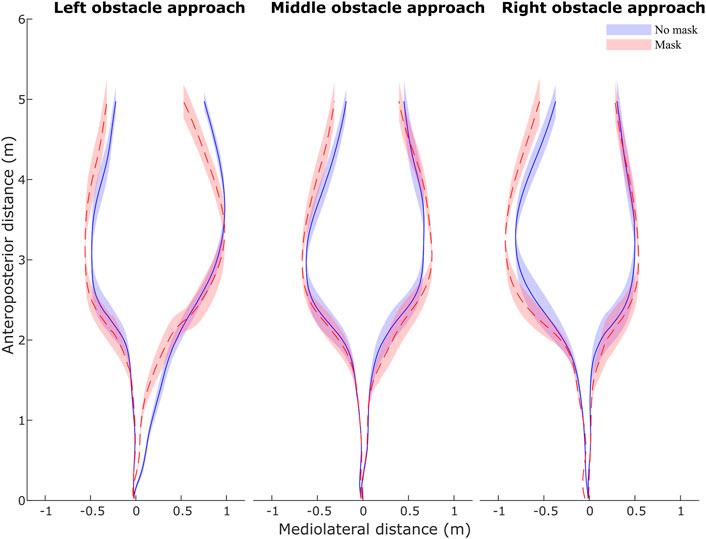
FIGURE 3. Trajectory traces for the different obstacle approach conditions. Lines represent the mean ± 1SD of all trials for all participants. Solid blue lines represent the unmasked condition and dashed red lines represent the masked condition.
Using a generalized estimating equation (GEE) model, we estimated the effects of surgical mask use (mask and no mask), and the direction from where the virtual reality pedestrian (VRP) was approaching (left, middle, and right). The bar graphs in Figure 4 represent the results of the statistical model. When considering the main effect of surgical mask use, a significant effect was observed for the distance at the onset of trajectory deviation [χ2 (1, 357) = 7.36, ρ = 0.0067]. Accordingly, participants initiated a change in trajectory at a greater distance from the VRP in the masked vs unmasked condition (Mean = 0.18 m, SE = 0.04 m, ρ < 0.0001). No statistically significant effect of surgical mask was observed for any of the remaining outcomes (minimum distance: ρ = 0.16 | maximum deviation: ρ = 0.16 | minimum velocity: ρ = 0.77 | average velocity: ρ = 0.45 | maximum velocity: ρ = 0.12 | fixation on advancing VRP: ρ = 0.31 | fixation of VRP’s head: ρ = 0.82 | fixation on other VPRs: ρ = 0.27).
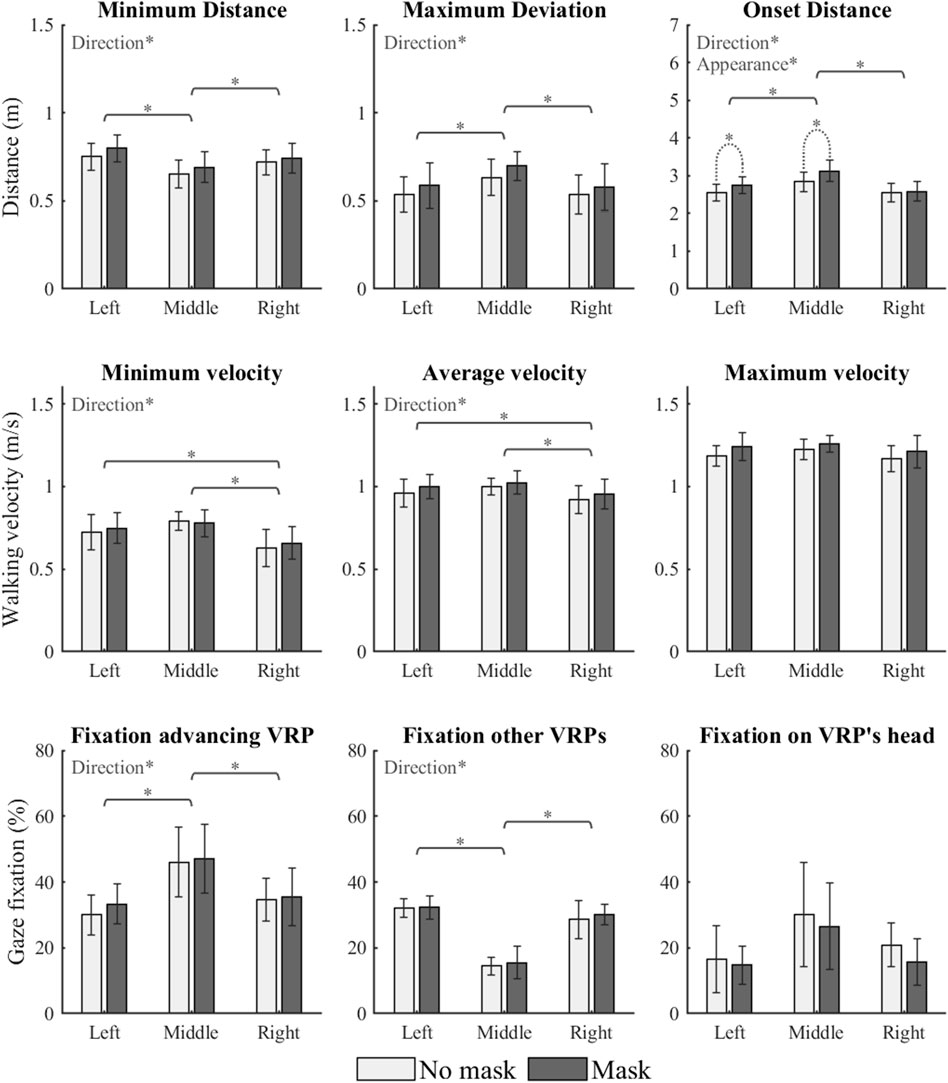
FIGURE 4. Outcomes describing participants’ behaviour. Bar graph representing the mean±1SE for all outcome measures. Light grey bars represent the unmasked condition and dark gray bars represent the masked condition. The X-axis represents the direction of VRP approach.
Significant differences due to the direction of approach were present for minimum distance [χ2 (2, 405) = 8.8, ρ = 0.01], onset distance [χ2 (2, 357) = 9.28, ρ = 0.009], and maximum deviation [χ2 (2, 357) = 7.08, ρ = 0.02]. Post-hoc comparisons revealed that trajectory adjustments in the middle obstacle approach condition, when compared to that for the left and right approaches, were characterized by smaller minimum distances (left: Δ = 0.10 m, SE = 0.01, ρ < 0.0001 | right: Δ = 0.06 m, SE = 0.02, ρ = 0.011), larger onset distances (left: Δ = 0.33 m, SE = 0.07, ρ < 0.0001 | right: Δ = 0.41 m, SE = 0.07, ρ < 0.0001), and larger maximum deviations (left: Δ = 0.10 m, SE = 0.02, ρ < 0.0001 | right: Δ = 0.11 m, SE = 0.03, ρ = 0.0004). For all these outcome measures, no statistically significant differences were observed when contrasting the left and right VRP approach conditions (ρ > 0.05).
When considering walking speed adaptations, the main effect of direction of approach was observed for minimum walking speed [χ2 (2, 405) = 8.57, ρ = 0.01] and average walking speed [χ2 (2, 405) = 7.19, ρ = 0.02], but not for maximum walking speed [χ2 (2, 405) = 3.01, ρ = 0.22]. Post-hoc comparisons showed that responses to a VRP approaching from the middle were characterized by faster minimum (Δ = 0.14 m/s, SE = 0.02, ρ < 0.0001) and average (Δ = 0.07 m/s, SE = 0.01, ρ < 0.0001) walking speeds when compared to the right condition. When contrasting the left and right obstacle approach conditions, the former resulted in a larger minimum (Δ = 0.09 m/s, SE = 0.03, ρ = 0.04) and average (Δ = 0.04 m/s, SE = 0.01, ρ = 0.02) walking speeds. Lastly, neither minimum (ρ = 0.09) nor average (ρ = 0.07) walking speeds significantly differed between the left and middle obstacle approach conditions.
The analysis of gaze fixation outcomes revealed a statistically significant main effect of direction of approach for the duration of fixation on the approaching VRP [χ2 (2, 373) = 6.07, ρ = 0.04] and other VRPs [χ2 (2, 319) = 9.43, ρ = 0.009]. Post-hoc analyses showed that fixations on the approaching VRP were longer for the middle vs left (Δ = 14.79%, SE = 3.65, ρ = 0.0001) and right (Δ = 11.45%, SE = 3.26, ρ = 0.001) approach conditions, but did not differ between the left vs right approach conditions (ρ = 0.30). In contrast, longer fixation durations on other VRPs were observed when comparing the middle to the left (Δ = 17.13%, SE = 1.99, ρ < 0.0001) and right (Δ = 14.30%, SE = 2.96, ρ < 0.0001) obstacle approach conditions. Fixations on the other VRPs also did not differ when contrasting the left and right obstacle approach conditions (ρ = 0.39). For fixations on the head of the approaching VRP, no significant differences due to the direction of obstacle approach were observed [χ2 (2, 219) = 2.60, ρ = 0.27].
With respect to the VR simulation, participants reported experiencing strong feelings of spatial presence inside the virtual environment (Mean = 8/10, SD = 0.89). As for the questionnaire regarding the frequency of community ambulation during the pandemic and associated anxiety, results are presented in Table 1. Participants reported low frequencies of community ambulation during the confinement period (Mean = 2.27/9, SD = 0.56) and a slight increase in the post-confinement period (Mean = 3.64/9, SD = 0.71). Additionally, correlations between the frequency of community ambulation and measures of obstacle clearance, such as minimum distance (No Mask: r = 0.02, ρ = 0.94 | Mask: r = −0.19, ρ = 0.56) and onset distance (No mask: r = 0.17, ρ = 0.61 | Mask: r = 0.10, ρ = 0.76), Were weak and did not reach statistical significance. Regarding anxiety towards community ambulation, the total anxiety score had an average of 15.18 ± 6.93 out of a possible maximum score of 30. Participants reported high levels of adherence to the government’s confinement measures, none reported contracting COVID-19 or having contact with someone who had been diagnosed with COVID-19. When questioned about the feeling of anxiety when interacting with the VRP in contrast to a real person, most of the participants reported feeling less anxious, while about a third of them reported no change and only one person reported feeling more anxious. Lastly, strong positive correlations between the sum of anxiety scores and measures of obstacle clearance were observed. Indeed, as displayed in Figure 5, the total anxiety score was positively correlated with minimum distance for the mask condition (r = 0.75, n = 11, ρ = 0.0073), but the correlation was not significant for the no mask condition (r = 0.57, n = 11, ρ = 0.065). For the onset distance, strong positive correlations with the total anxiety score were observed for both the mask (r = 0.86, n = 11, ρ = 0.0006) and no mask (r = 0.84, n = 11, ρ = 0.0012) conditions.
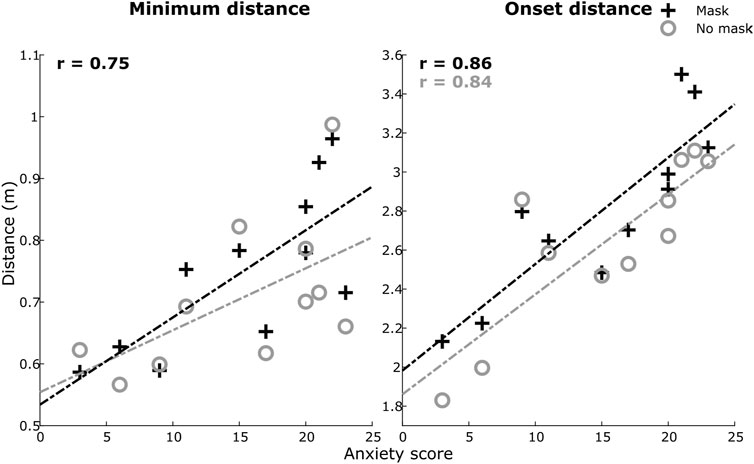
FIGURE 5. Correlations between anxiety score and measures of obstacle clearance. Scatterplots display the relationship between the total Anxiety score (X-axis) and Minimum distance (Left side panel Y-axis), as well as Anxiety score (X-axis) and Onset distance (Right side panel Y-axis). In this graph, the mean values for Minimum distance and Onset distance were obtained from all trials performed by each participant. Significant correlations are displayed with the respective correlation coefficients (r). A dashed line represents the least squares regression for each association.
4 Discussion
In this study, we used a VR paradigm to demonstrate that surgical masks influence pedestrian avoidance when walking in community environments. We further demonstrated the presence of an association between obstacle clearance outcomes and the level of anxiety but not the frequency of community ambulation in the context of the COVID-19 pandemic. Possible explanations and implications of these findings are presented below.
To describe the participant’s clearance around the VRP, we selected three outcome measures: minimum distance, maximum deviation, and onset distance. When contrasting the mask and no mask conditions, only onset distance showed a statistically significant difference, being larger for the mask condition. This distance reflects the distance from the interferer at which pedestrians initiate a change in walking trajectory to smoothly and safely avoid a collision (Gerin-Lajoie et al., 2005). In our perspective, this modulation in onset distance is meaningful as unlike other obstacle clearance metrics (i.e., minimum distance and maximum deviation), onset distance is a fairly stable measure that was shown to remain invariant despite changing the characteristics of the interferer, such as its gender, size, body orientation, and pattern of limb movements (Fiset et al., 2020; Bourgaize et al., 2021). This increase in the anteroposterior clearance, however, may reflect the execution of a safer strategy that is used in conditions involving a greater risk of collision (Buhler and Lamontagne, 2018). In the context of the present study which was conducted during the COVID-19 pandemic, we suggest that the presence of a surgical mask may have heightened the participants’ awareness of infection risk. Since respiratory droplets and aerosol particles travel in the direction of exhale and hence the anteroposterior direction, a larger onset distance would allow individuals to maintain a safer distance between themselves and the VRPs’ anticipated exhaling zone. Considering the results of a recent survey where masked individuals were perceived as preferring larger interpersonal distances (Seres et al., 2020), it is also possible that participants may have perceived the VRPs wearing a mask in the same fashion, resulting in a larger onset distance. Nevertheless, our results show that in opposition to the risk-compensation hypothesis, a larger anteroposterior clearance is observed during interactions with virtual mask-wearing pedestrians. These results also suggest that onset distance is an important outcome measure to investigate the effect of surgical masks on pedestrian’s interactions in a complex setting where physical and social factors interplay, such as a community environment.
In contrast with the onset distance, we did not observe significant differences in minimum distance and maximum trajectory deviation between the mask and no mask conditions. Considering that pedestrians move around obstructions while minimizing adjustments of speed and trajectory (Pham et al., 2007; Warren et al., 2008), minimum distance and maximum deviation characterize a critical distance maintained from an interferer and the magnitude of trajectory adaptations. Taken together with our previous discussion of the mechanics of droplet and aerosol transmission when avoiding pedestrians (i.e., larger risk when face-to-face), it is possible that increasing minimum distance and maximum deviation would not provide additional benefits once the interferer was to the side.
We further examined gaze fixations and while we expected that longer fixations on the approaching interferer would be maintained in the mask condition, especially on the interferer’s head, such an effect was not observed. It is possible that a short fixation on the interferer’s head was sufficient to identify the presence of a mask and bring about the observed changes in obstacle circumvention strategies. Furthermore, the need to visually scan the head of the approaching VRP may have been reduced due to the fact that masked trials were performed in sequence and in the same block of trials.
Importantly, the fact that a mask-induced effect could be detected in this study adds further support to the use of VR as a valid tool to study movement behavior in the context of social interactions. In previous studies from our laboratory, and even though VR can introduce a distance perception bias (Renner et al., 2013), we have shown that obstacle avoidance behavior is essentially the same in response to virtual vs real pedestrians, with similar onset distance values and slightly larger minimum distances in VR (Buhler and Lamontagne, 2018; Buhler and Lamontagne, 2019). It is thus reasonable to assume that the mask-induced changes observed in the present study, do reflect a natural behaviour. It cannot be fully excluded, however, that the effects due to the surgical mask might be even larger in the physical world where the infection risk is “real”, especially since 63% of participants reported feeling less anxious when interacting with the VRPs compared to real pedestrians.
Regarding community walking, the healthy and young participants tested as part of this study reported a low frequency during and after the confinement period. Considering the confinement measures that were put in place and the high adherence to these measures that our participants reported, this finding was not unexpected. After the confinement period, the frequency of community ambulation increased by a small amount, but we did not observe correlations between the frequency of community ambulation and obstacle clearance measures. In agreement with a 2021 study that compiled mobile device data from 1.62 million anonymous users in 10 metropolitan areas in the United States (Hunter et al., 2021), results from our questionnaire suggest that while community ambulation increased with the easing of lockdown restrictions, people still showed signs of reluctance to leave their homes.
Results of the present study also indicate that overall, participants were somewhat anxious toward community ambulation. In parallel, they reported maintaining larger interpersonal distances when interacting with other pedestrians after the pandemic started. These observations suggest an influence of confinement measures implemented during the COVID-19 pandemic on self-reported psychological and behavioral metrics related to community ambulation. In addition, we observed strong positive correlations between anxiety and clearance measures during the circumvention of the VRPs. In agreement, Perry et al. (2013) also observed, in a paper and pencil task, associations between anxiety and a preference for larger interpersonal distances. Therefore, the observations presented here extend our knowledge to the context of pedestrians’ interactions. Furthermore, the stronger and more consistent (i.e., present for both the mask and no-mask conditions) correlations observed between anxiety and onset distance support the idea that larger distances at onset of deviation are implemented as an infection prevention strategy. Thus, we propose that factors beyond sensorimotor processes such as social context and psychological status can influence complex locomotor behaviors such as pedestrian interactions.
All locomotor measures of obstacle circumvention, excluding maximum walking speed and fixation on the head of the approaching VRP, differed significantly according to the direction from which the VRP approached. Most of these variations in circumvention strategies have been observed in previous studies (Aravind and Lamontagne, 2017; Buhler and Lamontagne, 2018; Souza Silva et al., 2018; Buhler and Lamontagne, 2019) and appear to reflect adaptations according to the bearing angle (Huber et al., 2014) or whether the pedestrian passes in front or behind the VRP (Olivier et al., 2013). In the context of this experiment, the right and left obstacle approach conditions represent the same bearing angle of 30° and the middle condition represents a bearing angle of 0°. With respect to the role taken by the participant during the task, while diagonal approaches represent an unresolved situation where they can decide to pass in front or to give way, the middle condition requires the participant to give way (Olivier et al., 2013). Accordingly, all measures of obstacle clearance (i.e., minimum distance, maximum deviation, and onset distance) showed significant differences between the diagonal obstacle approaches (left or right) and the middle approach, while no differences were observed between the diagonal obstacle approaches. In the middle condition, the observation of larger deviations that started at greater distances from the VRP, yet still resulted in smaller minimum clearances, suggests a higher degree of challenge when compared to the diagonal conditions.
When considering gaze fixation outcomes, differences between the direction of interferer approach were also observed. As depicted in Figure 4, in the middle condition, participants maintained longer fixations on the approaching VRP and shorter fixations on the other VRPs. Interestingly, the opposite pattern was observed in the diagonal approach conditions. These findings suggest that rather than fixating their gaze on the approaching interferer, participants were likely looking straight ahead, that is towards their heading direction and/or target. Lastly, we observed larger minimum and average walking velocities in response to the VRPs approaching from the middle and the left as opposed to the right. While these findings are in opposition with an earlier observation from our laboratory (Buhler and Lamontagne, 2018), where we did not observe differences in average walking speed across directions of obstacle approach, it should be noted that differences observed here were very small (<0.1 m/s).
We recognize that our study has limitations. It involves a small sample size comprised mainly of individuals who reported high levels of compliance with governmental regulations. It was also carried out within a constrained geographical region (Montreal metropolitan area) and a in limited time frame coinciding with the first wave of the pandemic. These factors altogether limit the generalization of findings to the general population, to other regions of the world, and possibly to subsequent pandemic waves. Results, however, do align with other studies performed in the real-world (Marchiori, 2020; Seres et al., 2020) and add further support for the effects of surgical masks on measures of obstacle clearance during interpersonal interactions. Our experiment also involved interferers that did not react to the participants. While this is usually not the case when interacting with other pedestrians (Olivier et al., 2013), this non-reactive behaviour was constant in all conditions, that is whether the VRPs were masked or not. Furthermore, a recent study demonstrated that similar strategies were used when avoiding a non-reactive robot compared to another pedestrian (Vassallo et al., 2017). Future studies should validate these findings by contrasting responses to virtual vs real masked and unmasked pedestrians in a larger sample size.
In conclusion, we observed that participants increased their anteroposterior clearance (i.e., onset distance) when circumventing a VRP wearing a surgical mask. This strategy allowed stepping away from the VRPs’ walking path at a greater distance. A larger anteroposterior clearance could be a product of social factors related to a heightened awareness of infection risk (i.e., exposure to respiratory droplets and aerosol particles) and/or due to an assumption that the mask-wearing pedestrian prefer a larger interpersonal distance. These findings oppose the notion that mask-wearing promotes risk-compensation behaviors and demonstrate that a specific strategy is used to increase interpersonal distances when avoiding a masked pedestrian (i.e., larger onset distance). Participants also reported feelings of anxiety towards community ambulation, and greater anxiety was associated with larger obstacle clearances. Altogether, the results of this study demonstrate the importance of considering social and psychological factors when examining complex locomotor behaviors such as pedestrian interactions. They further highlight the potential of VR for studying the influence of these factors on movement behavior in general.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Ethics statement
This study, which involved human participants, was reviewed and approved by the Research Ethics Board in Rehabilitation and Physical Disability of the CIUSSS du Centre-Sud-de-l’Île-de-Montréal. The patients/participants provided their written informed consent to participate in this study.
Author contributions
All authors helped conceive the experiment. MB, SL, TB, and AZ conducted the experiment and were involved in the initial drafts of the manuscript. MB processed the data, performed the statistical analysis, interpreted the results, and prepared the final manurscript. All authors reviewed the manuscript and gave feedback on its contents. AL supervised the study. All authors contributed to the article and approved the submitted version.
Funding
This work was supported by the Natural Sciences and Engineering Research Council (NSERC) under Grant RGPIN/04471-2016 and MB is supported by a doctoral award from the Fonds de Recherche du Québec (FRQS).
Acknowledgments
We would like to thank Samir Sangani for developing the virtual environment and the virtual avatars, as well as Christian Beaudoin for developing the Unreal program that managed the experiment. Furthermore, we would like to acknowledge that our custom-made questionnaire was a multicentre creation between McGill University and the Université Laval, and we thank Anne-Hélène Olivier and Michael Cinelli for their feedback.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Anand, K. B., Karade, S., Sen, S., and Gupta, R. M. (2020). SARS-CoV-2: Camazotz's curse. Med. J. Armed Forces India 76 (2), 136–141. doi:10.1016/j.mjafi.2020.04.008
Aravind, G., and Lamontagne, A. (2017). Dual tasking negatively impacts obstacle avoidance abilities in post-stroke individuals with visuospatial neglect: Task complexity matters. Restor. neurology Neurosci. 35 (4), 423–436. doi:10.3233/rnn-160709
Basili, P., Saglam, M., Kruse, T., Huber, M., Kirsch, A., and Glasauer, S. (2013). Strategies of locomotor collision avoidance. Gait Posture 37 (3), 385–390. doi:10.1016/j.gaitpost.2012.08.003
Bohannon, R. W. (1997). Comfortable and maximum walking speed of adults aged 20-79 years: Reference values and determinants. Age Ageing 26 (1), 15–19. doi:10.1093/ageing/26.1.15
Bouchard, S., Robillard, G., St-Jacques, J., Dumoulin, S., Patry, M. J., and Renaud, P. (2004). “Reliability and validity of a single-item measure of presence in VR,” in The 3rd IEEE International Workshop on Haptic, Audio and Visual Environments and Their Applications, Ottawa, ON, Canada, 2-3 Oct. 2004 (IEEE).
Boulanger, M., and Lamontagne, A. (2017). “Eye-head coordination during overground locomotion and avoidance of virtual pedestrians,” in 2017 International Conference on Virtual Rehabilitation (ICVR), Montreal, QC, Canada, 19-22 June 2017 (IEEE).
Bourgaize, S. M., McFadyen, B. J., and Cinelli, M. E. (2021). Collision avoidance behaviours when circumventing people of different sizes in various positions and locations. J. Mot. Behav. 53 (2), 166–175. doi:10.1080/00222895.2020.1742083
Buhler, M. A., and Lamontagne, A. (2018). Circumvention of pedestrians while walking in virtual and physical environments. IEEE Trans. neural Syst. rehabilitation Eng. Publ. IEEE Eng. Med. Biol. Soc. 26 (9), 1813–1822. doi:10.1109/tnsre.2018.2865907
Buhler, M. A., and Lamontagne, A. (2019). Locomotor circumvention strategies in response to static pedestrians in a virtual and physical environment. Gait Posture 68, 201–206. doi:10.1016/j.gaitpost.2018.10.004
Cartaud, A., Quesque, F., and Coello, Y. (2020). Wearing a face mask against Covid-19 results in a reduction of social distancing. PLoS One 15 (12), e0243023. doi:10.1371/journal.pone.0243023
Chu, D. K., Akl, E. A., Duda, S., Solo, K., Yaacoub, S., Schunemann, H. J., et al. (2020). Physical distancing, face masks, and eye protection to prevent person-to-person transmission of SARS-CoV-2 and COVID-19: A systematic review and meta-analysis. Lancet 395 (10242), 1973–1987. doi:10.1016/s0140-6736(20)31142-9
Darekar, A., Lamontagne, A., and Fung, J. (2017). Locomotor circumvention strategies are altered by stroke: I. Obstacle clearance. J. Neuroeng Rehabil. 14 (1), 56. doi:10.1186/s12984-017-0264-8
Ehsanifar, M. (2021). Airborne aerosols particles and COVID-19 transition. Environ. Res. 200, 111752. doi:10.1016/j.envres.2021.111752
Eikenberry, S. E., Mancuso, M., Iboi, E., Phan, T., Eikenberry, K., Kuang, Y., et al. (2020). To mask or not to mask: Modeling the potential for face mask use by the general public to curtail the COVID-19 pandemic. Infect. Dis. Model. 5, 293–308. doi:10.1016/j.idm.2020.04.001
Fiset, F., Lamontagne, A., and McFadyen, B. J. (2020). Limb movements of another pedestrian affect crossing distance but not path planning during virtual over ground circumvention. Neurosci. Lett. 736, 135278. doi:10.1016/j.neulet.2020.135278
Gerin-Lajoie, M., Richards, C. L., and McFadyen, B. J. (2006). The circumvention of obstacles during walking in different environmental contexts: A comparison between older and younger adults. Gait Posture 24 (3), 364–369. doi:10.1016/j.gaitpost.2005.11.001
Gerin-Lajoie, M., Richards, C. L., and McFadyen, B. J. (2005). The negotiation of stationary and moving obstructions during walking: Anticipatory locomotor adaptations and preservation of personal space. Mot. control 9 (3), 242–269. doi:10.1123/mcj.9.3.242
Harper, C. A., Satchell, L. P., Fido, D., and Latzman, R. D. (2021). Functional fear predicts public health compliance in the COVID-19 pandemic. Int. J. Ment. Health Addict. 19 (5), 1875–1888. doi:10.1007/s11469-020-00281-5
Hayduk, L. A. (1983). Personal space: Where we now stand. Psychol. Bull. 94 (2), 293–335. doi:10.1037/0033-2909.94.2.293
Huber, M., Su, Y. H., Kruger, M., Faschian, K., Glasauer, S., and Hermsdorfer, J. (2014). Adjustments of speed and path when avoiding collisions with another pedestrian. PLoS One 9 (2), e89589. doi:10.1371/journal.pone.0089589
Hunter, R. F., Garcia, L., de Sa, T. H., Zapata-Diomedi, B., Millett, C., Woodcock, J., et al. (2021). Effect of COVID-19 response policies on walking behavior in US cities. Nat. Commun. 12 (1), 3652. doi:10.1038/s41467-021-23937-9
Jorgensen, F., Lindholt, M. F., Bor, A., and Petersen, M. B. (2021). Does face mask use elicit risk-compensation? Quasi-Experimental evidence from Denmark during the SARS-CoV-2 pandemic. Eur. J. Public Health 31 (6), 1259–1265. doi:10.1093/eurpub/ckab136
Kaiser, P. K. (2009). Prospective evaluation of visual acuity assessment: A comparison of snellen versus ETDRS charts in clinical practice (an AOS thesis). Trans. Am. Ophthalmol. Soc. 107, 311–324.
Leung, N. H. L. (2021). Transmissibility and transmission of respiratory viruses. Nat. Rev. Microbiol. 19 (8), 528–545. doi:10.1038/s41579-021-00535-6
Liebst, L. S., Ejbye-Ernst, P., de Bruin, M., Thomas, J., and Lindegaard, M. R. (2022). No evidence that mask-wearing in public places elicits risk compensation behavior during the COVID-19 pandemic. Sci. Rep. 12 (1), 1511. doi:10.1038/s41598-022-05270-3
Luckman, A., Zeitoun, H., Isoni, A., Loomes, G., Vlaev, I., Powdthavee, N., et al. (2021). Risk compensation during COVID-19: The impact of face mask usage on social distancing. J. Exp. Psychol. Appl. 27 (4), 722–738. doi:10.1037/xap0000382
Marchiori, M. (2020). COVID-19 and the social distancing paradox: Dangers and solutions. arXiv: Populations and Evolution.
Oldfield, R. C. (1971). The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologia 9 (1), 97–113. doi:10.1016/0028-3932(71)90067-4
Olivier, A-H., Bruneau, J., Cirio, G., and Pettré, J. (2014). A virtual reality platform to study crowd behaviors. Transp. Res. Procedia 2, 114–122. doi:10.1016/j.trpro.2014.09.015
Olivier, A. H., Marin, A., Cretual, A., Berthoz, A., and Pettre, J. (2013). Collision avoidance between two walkers: Role-dependent strategies. Gait Posture 38 (4), 751–756. doi:10.1016/j.gaitpost.2013.03.017
Perry, A., Rubinsten, O., Peled, L., and Shamay-Tsoory, S. G. (2013). Don't stand so close to me: A behavioral and ERP study of preferred interpersonal distance. NeuroImage 83, 761–769. doi:10.1016/j.neuroimage.2013.07.042
Pham, Q. C., Hicheur, H., Arechavaleta, G., Laumond, J. P., and Berthoz, A. (2007). The formation of trajectories during goal-oriented locomotion in humans. II. A maximum smoothness model. Eur. J. Neurosci. 26 (8), 2391–2403. doi:10.1111/j.1460-9568.2007.05835.x
Renner, R. S., Velichkovsky, B. M., and Helmert, J. R. (2013). The perception of egocentric distances in virtual environments - a review. ACM Comput. Surv. 46 (2), 1–40. doi:10.1145/2543581.2543590
Seres, G., Balleyer, A., Cerutti, N., Danilov, A., Friedrichsen, J., Liu, Y., et al. (2020). Face masks increase compliance with physical distancing recommendations during the COVID-19 pandemic. J. Econ. Sci. Assoc. 7, 139–158. doi:10.1007/s40881-021-00108-6
Souza Silva, W., Aravind, G., Sangani, S., and Lamontagne, A. (2018). Healthy young adults implement distinctive avoidance strategies while walking and circumventing virtual human vs. non-human obstacles in a virtual environment. Gait Posture 61, 294–300. doi:10.1016/j.gaitpost.2018.01.028
Vassallo, C., Olivier, A. H., Soueres, P., Cretual, A., Stasse, O., and Pettre, J. (2017). How do walkers avoid a mobile robot crossing their way? Gait Posture 51, 97–103. doi:10.1016/j.gaitpost.2016.09.022
Vassallo, C., Olivier, A. H., Soueres, P., Cretual, A., Stasse, O., and Pettre, J. (2018). How do walkers behave when crossing the way of a mobile robot that replicates human interaction rules? Gait Posture 60, 188–193. doi:10.1016/j.gaitpost.2017.12.002
Warren, W. H., and Fajen, B. R. (2008). “Behavioral dynamics of visually guided locomotion,” in Coordination: Neural, behavioral and social dynamics. Understanding complex systems. Editors A. Fuchs, and V. K. Jirsa (Berlin, Heidelberg: Springer Berlin Heidelberg), 45–75.
Keywords: COVID-19, surgical maks, obstacle avoidance, locomotion, virtual reality
Citation: Bühler MA, Lynch SD, Bhojwani TM, Zidan A, Fiset F, McFadyen BJ and Lamontagne A (2023) Influence of surgical masks on the avoidance of virtual pedestrians. Front. Virtual Real. 4:1081003. doi: 10.3389/frvir.2023.1081003
Received: 26 October 2022; Accepted: 07 March 2023;
Published: 23 March 2023.
Edited by:
Daniel Thalmann, Swiss Federal Institute of Technology Lausanne, SwitzerlandReviewed by:
Colin Ellard, University of Waterloo, CanadaMeredith Carroll, Florida Institute of Technology, United States
Copyright © 2023 Bühler, Lynch, Bhojwani, Zidan, Fiset, McFadyen and Lamontagne. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Marco A. Bühler, bWFyY28uYnVobGVyQG1haWwubWNnaWxsLmNh