 Pierre-Pascal Forster1,2
Pierre-Pascal Forster1,2 Harun Karimpur
Harun Karimpur Katja Fiehler
Katja Fiehler- 1Experimental Psychology, Justus Liebig University, Giessen, Germany
- 2Center for Mind, Brain and Behavior (CMBB), University of Marburg and Justus Liebig University, Giessen, Germany
When interacting with objects in the environment, it feels natural to have a body which moves in accordance to our intentions. Virtual reality (VR) provides a tool to present users with an alternative virtual body and environment. In VR, humans embody the presented virtual body and feel present in the virtual environment. Thus, embodiment and presence frequently co-occur and share some communalities. Nevertheless, both processes have been hardly considered together. Here, we review the current literature on embodiment and presence and present a new conceptual framework, the Implied Body Framework (IBF), which unifies both processes into one single construct. The IBF can be used to generate new hypotheses to further improve the theoretical conceptualisation of embodiment and presence and thus, facilitate its transfer into application.
1 Introduction
The interaction between the self and the environment is fundamental to human lives. It provides our body with nourishment and helps us to react when confronted with potential dangers. Similar to real life, we feel a strong distinction between ourselves and the environment in virtual reality (VR), i.e., a feeling to be a separate entity within the environment. Whether we experience a virtual or the actual physical environment, processes of embodiment and presence are an essential element of this experience. This has direct and practical implications. First, in-depth knowledge of embodiment and presence can help us to improve VR experiences. For example, when playing VR games, body movements can be tracked and mapped onto an avatar. Neural networks can be used to predict these movements, which can then be fed back, mapping the future movement states on the avatar. This lead to a stronger believe that the players were in the virtual environment, with the avatar at the same location as their real body (Schwind et al., 2020). Second, patients might benefit from advances in embodiment and presence research, e.g., when conducting mirror therapy to alleviate phantom limb pain (Ramachandran and Rogers-Ramachandran, 1996; Wang et al., 2021, but see also; Barbin et al., 2016), or using exposure therapies to treat phobias (c.f., Ling et al., 2014). Knowledge from embodiment and presence research can therefore improve practical applications in VR and real life. However, transferring knowledge is currently hindered by the lack of an agreed upon common framework accounting for a possible relation between both processes (Section 1.2), and methodology problems (Section 1.3). Here, we review the relevant literature including previous frameworks (Section 1.4), and propose a new conceptual framework accounting for the possible relation of embodiment and presence (Section 2).
1.1 Conceptualisations of Embodiment and Presence
In this review, we describe embodiment as the process which integrates bodily entities, like a rubber arm (de Vignemont, 2011), into the body representation. The experiential properties arising from this integration process structure embodiment by describing sensations relating to our body, i.e., ownership, location, and agency (Kilteni et al., 2012a, see also; Longo et al., 2008). Hereby, ownership describes the feeling that the body belongs to us; location refers to a sense of where we locate self and body relative to each other; and agency is the feeling of being in control of one’s own actions.
Various conceptualisations have been proposed for presence. Telepresence, for example, was used to describe the user’s virtual transportation to another place, where a machine on the real site is controlled by the user (Sheridan, 1992; Minsky, 2010). Performing bodily actions and receiving appropriate sensory feedback were considered as important characteristics of telepresence (Minsky, 2010). For VR applications, it is important that a definition of presence also encompasses presence in virtual environments, where a real counterpart does not necessarily exist. Following an influential review (Lee, 2004), presence can be divided into physical- (experiencing a virtual environment as real and unmediated), self- (experiencing a virtual body as one’s own body), and social-presence (experiencing virtual others as real). The term co-presence is related to this latter component, but focusses on “being together” with others (Slater et al., 2000). The definition of physical presence does not require that the participant has the feeling to “be there” (c.f., Lee, 2004), which is another commonly used description of presence (e.g., Schubert et al., 2001; Slater et al., 2009). This sense to “be there” and the feeling that events in VR are real, are also covered by the terms place illusion and plausibility illusion (Slater, 2009; Slater et al., 2010a). Spatial presence sets a similar focus, encompassing “being there” and experienced opportunities for actions (Wirth et al., 2007). Altogether, having a sense to be within an environment, which comprise the feeling to be located within the respective environment, is fundamental to generate a sense of presence. Acting in this environment might thereby directly link to perceiving the environment as real (c.f., Zahorik and Jenison, 1998).
Some of those definitions describe components indicating a conceptual overlap between embodiment and presence (c.f., Lee, 2004). In addition, to feel present in an environment, more precisely, to “be there,” is enhanced by the body (c.f., Slater, 2009; Slater et al., 2010a), which might give a reference for where one feels present. As embodiment determines what we perceive as belonging to our body, presence might depend on the product of embodiment. This poses a fundamental question: How do embodiment and presence relate to each other? Investigating this question is especially important for clinical and industry applications that build on this knowledge.
1.2 Relation Between Embodiment and Presence
Relating embodiment and presence is not entirely new, but rather underrepresented in the current literature. A positive example can be found in a seminal paper from Kilteni et al. (2012a), which mentions that presence could be included in a broader definition of embodiment. A recent review (Nostadt et al., 2020) offers guiding principles to facilitate the construction of such a common framework. Following these principles, mechanical fidelity is on the lower level and describes how well participants can interact in a virtual environment. Spatial bodily awareness is placed at an intermediate level and helps when moving through this environment, as it relates to one’s own location in the environment. The topmost level describes self-identification, which relates to ownership. Given this hierarchical structure, improvements in the location component and presence (both part of spatial bodily awareness) should directly contribute to the feeling of ownership. However, interactions between different levels are not yet defined. These guiding principles help to structure the concepts of embodiment and presence, but do not explain the underlying mechanisms that link the two.
Concerning the embodiment components, ownership is conceptionally similar to self-presence, which emerges when participants perceive a virtual body as their own, i.e., when ownership is perceived (c.f., Lee, 2004). The location component and the feeling to “be there” are also conceptionally similar, as they refer to where we locate ourselves. However, both address distinct spatial components, i.e., one’s own location with respect to a body or within an environment (Kilteni et al., 2012a). The latter is especially important to perform actions and to engage with objects or other agents. Performing actions might support presence, in particular telepresence, where the participant is virtually transported to another environment to perform remote actions. For example, when operating a rover on the moon, we might feel present because of the agency we feel when tipping a joystick forward and experiencing immediate consequences on the image that is provided on the monitor. This links presence to actions and suggests that we feel present, when the virtual environment responds in the same way to our actions, as we expect it from the real environment (Zahorik and Jenison, 1998).
Given potential links between embodiment and presence, we would expect that both processes influence each other, but are still separate processes. Accordingly, positive correlations have been reported between questionnaire items on ownership and presence (Roth and Latoschik, 2020). That both processes are nevertheless distinct can be observed when changing the perspective (first-person-perspective or third-person-perspective) over a virtual body. Changing the perspective in a VR experiment showed that a first-person-perspective is important for the feeling of ownership and location, but lacked an effect on spatial presence (Gorisse et al., 2017). However, ownership over a body seen from a third-person-perspective is possible (Ehrsson, 2007), suggesting that manipulating perspective declines, but does not abolish embodiment.
Decoupling presence from the perspective over a body might enable participants to feel present even though a virtual body is not presented. This implies a strong separation between embodiment and presence. As participants can experience some form of embodiment even with an invisible body (Guterstam et al., 2015), it remains unclear whether both processes are truly separated in such situations. Considering the role of the body for the sense of presence can provide additional insights.
Previous work suggests that VR avatars capturing individual body characteristics, e.g., based on 3D body scans of the participant, can enhance the sense of presence and ownership (Waltemate et al., 2018). In general, a body itself is important for establishing a sense of presence (Slater, 2009; Slater et al., 2010a; Pan and Steed, 2019; but see also; Steed et al., 2016; Wolf et al., 2020). Steed et al. (2018) manipulated avatar visibility in VR and found that a visible avatar improved participants feeling to “be there” and to perceive the virtual environment as real. These feelings benefitted even more when other virtual avatars glanced at the participant, making it important for participants to have a virtual body, although it was not the main contribution to presence. Other studies used a setup which required participants to optimise their experience in VR to enhance presence. This required participants to add features like an increased field of view to their VR experience. The results indicate that having an avatar is important to feel present, or having a place illusion, in the virtual environment (Slater et al., 2010a, see also; Llobera et al., 2021). The avatar might serve as a spatial reference point and thereby promote presence. This suggests that embodiment and presence depend on similar information and that presence might build upon embodiment processes. Such a conceptual overlap between embodiment and presence likely translates into methodological difficulties in separating both processes.
1.3 Measures of Embodiment and Presence
There are several challenges concerning currently used measures of embodiment and presence (for a review on measures see Kilteni et al. (2012a), who include measures of embodiment; and Grassini and Laumann (2020) and Souza et al. (2021), who discuss measures of presence). It is unclear whether these challenges arise from their validity or discriminant power to separate between the two processes. A lack of validity requires to reconsider and improve these measures. If embodiment and presence are more closely related than previously thought, studies would likely fail to measure each process individually, but instead would need to consider their relations to finally extract their differential contributions to the underlying mechanism.
The validity of currently used subjective measures in embodiment and presence research is rather questionable. Questionnaire items measuring embodiment (e.g., Botvinick and Cohen, 1998; Longo et al., 2008) or presence (e.g., Witmer and Singer, 1998; Slater and Steed, 2000) are repeatedly used, but a standardised instrument is currently missing. Some studies aimed to create questionnaires by considering psychometric properties (e.g., Roth and Latoschik, 2020), but currently used measures are far from being comparable to diagnostic instruments (e.g., Raven’s Standard Progressive Matrices, Raven, 2003). In addition, questionnaire items are open to participants’ interpretations, when they are trying to make sense of the posed questions (Usoh et al., 2000). More extreme, one might ask whether the reported percept in questionnaires was experienced at all, or only constructed post-hoc after being questioned about it (Slater, 2004). This suggests that questionnaires alone are inappropriate to measure embodiment and presence.
However, combining questionnaires with objective measures might not be sufficient to overcome shortcomings, as the validity of objective measures can also be questioned. For example, in the rubber hand illusion (RHI, see Box 1 and Figure 1), proprioceptive drift is frequently used to assess embodiment (e.g., Botvinick and Cohen, 1998; Kalckert and Ehrsson, 2014a), but might be inappropriate to discriminate between ownership and location (Longo et al., 2008; Kilteni et al., 2012a). Further, proprioceptive drift and ownership/RHI items might be dissociated (Holle et al., 2011; Abdulkarim and Ehrsson, 2016), which could explain why both measures are sometimes unrelated (Crucianelli et al., 2013; Walsh et al., 2015). A similar finding can be observed for attempts to validate physiological measures of embodiment (e.g., Ehrsson et al., 2008; Petkova and Ehrsson, 2008) or presence (Meehan et al., 2002) with questionnaires, where some studies report their physiological measures to be in accordance with sensations described in the administered questionnaire (Slater et al., 2010b; Yu et al., 2012; Preuss and Ehrsson, 2019), but others fail to find such a relationship (e.g., Peperkorn et al., 2015; Kokkinara et al., 2016; Eftekharifar et al., 2020). Validating objective measures is additionally challenged by findings showing that objective and subjective measures, for both, ownership and agency, do not entirely depend on the same underlying information (Ma et al., 2021; Qu et al., 2021).
Box 1 | The Rubber Hand Illusion.
What is the rubber hand illusion? Embodiment has attracted broad scientific interest after Botvinick and Cohen (1998) described the rubber hand illusion (RHI). In this setup (Figure 1), participants receive brush strokes on their own hidden hand that are synced to strokes on a rubber hand that is in full view, directly in front of them. It is argued that multisensory integration enables the illusion that the rubber hand belongs to one’s own body. Under this view, visual and tactile sensations are integrated, and proprioceptive information becomes subsequently adjusted to match the congruent information of the other two modalities (Botvinick and Cohen, 1998).
Which control measures are used? Botvinick and Cohen (1998) introduced two control measures to capture suggestibility effects. First, they used stroking synchrony to manipulate multisensory integration. The RHI occurred after synchronous but not asynchronous stroking. Second, they used a set of experimental and control questionnaire items (but see, Lush, 2020). An illusory effect was reflected in higher ratings of the experimental questions. These manipulations and control items have been widely used in embodiment research.
Are there objective measures? During the RHI, the sensed position of the real hand becomes biased towards the rubber hand, to match congruent information from vision and touch (Botvinick and Cohen, 1998). Proprioceptive drift is one of the widely used objective measure to assess this bias (e.g., Botvinick and Cohen, 1998; Kalckert and Ehrsson, 2012; Ma et al., 2021). Participants have to indicate the perceived position of their unseen hand, with the hand not used during the RHI by relying on proprioception (Botvinick and Cohen, 1998). If the perceived position drifts towards the rubber hand, it is generally interpreted as an indication of having embodied the fake hand (but see, Rohde et al., 2011; Fuchs et al., 2016).
What about modern approaches? Since the introduction of the RHI, embodiment was investigated in various setups (e.g., Kalckert and Ehrsson, 2012; Chancel and Ehrsson, 2020). Some allowed finger movements of the rubber hand (e.g., Kalckert and Ehrsson, 2012), which adds the possibility to test for agency. Currently, more studies on embodiment are run in VR (e.g., Kilteni et al., 2012b; O’Kane and Ehrsson, 2021), thereby providing more flexibility and the opportunity to test conditions where the position of the virtual and the real arm overlap (c.f., Ma et al., 2021), which was impossible with the original RHI setup.

FIGURE 1. Setup of the rubber hand illusion. The rubber hand model was taken from www.turbosquid.com under their standard license, and the avatar model from mixamo.com.
This clearly shows that the quality of subjective and objective measures needs to be improved. Despite challenges related to validity, it is also likely that the measures in use cannot clearly discriminate between embodiment and presence. For questionnaire measures, this is evident in positive correlations between ownership and presence (Roth and Latoschik, 2020). Further, it is unclear if physiological measures can distinguish both processes. For example, in a height exposure task in VR, the observed response in objective measures could be attributed to three possible causes: the participant having embodied an avatar, the participant feeling present in the virtual environment, or both. This is evident in experiments using the same measures in similar setups and interpreting them as indicator for one or the other process (c.f., Meehan et al., 2002; Galvan Debarba et al., 2017), hindering the differentiation between embodiment and presence based on physiological measures.
At the current stage it is unclear whether measures of embodiment and presence are challenged by a lack of validity, discriminability, or both. One possible solution is to measure participants experiences in VR, without explicitly referring to the underlying constructs. This can be realised by letting them manipulate their own and/or the virtual environment’s appearance, e.g., if they would like to have an avatar representing their body. This can thereby indicate which factors improve participants’ VR experience (c.f., Murcia-López et al., 2020; Llobera et al., 2021). Although this is an encouraging approach to solve these challenges, it might be less applicable when trying to understand the underlying constructs. In this case, the development of adequate measures requires knowledge on how embodiment and presence are related, which can be facilitated by the development of a common framework. Such a framework should also account for already existing conceptualisations of both processes.
1.4 Previous Work on Embodiment and Presence Frameworks
When introducing the RHI, Botvinick and Cohen (1998) postulated bottom-up factors driving the embodiment of the rubber hand. In their view, proprioceptive information becomes biased to match sensory information from vision and touch. Scientific evidence supports the contribution of bottom-up factors in the RHI (e.g., Guterstam et al., 2019) and in VR (e.g., Slater et al., 2010b). Top-down factors can likewise influence embodiment by limiting the scope of integration into one’s own body. Thus, factors like shape (e.g., Tsakiris et al., 2010) and orientation (e.g., Ehrsson et al., 2004) of the rubber hand are important constraints. This indicates that the embodied entity should be plausibly connected to the body, although some degrees of flexibility can be observed (e.g., Kilteni et al., 2012b). The relevance of individual factors was recently examined, indicating that having control and a first-person-perspective over an avatar in VR are more important for embodiment than avatar appearance (Fribourg et al., 2020).
Neurocognitive models of ownership also consider bottom-up and top-down factors. Tsakiris (2010) describes a three-step comparison underpinned with neural correlates contributing to the RHI. The first two steps compare the appearance and posture of the rubber hand to top-down knowledge of one’s own body. Bottom-up sensory information (e.g., seeing a rubber hand being touched and feeling touch on one’s own hand) are compared in a third step, enabling participants to feel the brush strokes on the rubber hand, and to attribute ownership to the rubber hand. Although this model is specific for the RHI, it could in principle be applied to embodiment experiments in VR. Maselli and Slater (2013) proposed that ownership may arise from the interaction of different neural populations encoding top-down and bottom-up influences. Hereby, one population of neurons encodes the similarity between virtual and real hand, leading to the feeling of ownership, whereas neurons sensitive to multisensory information modulate the feeling of ownership. Thus, top-down restrictions have to be met before multisensory correlations can affect participants’ feeling of ownership. On a computational level, embodiment can be applied to Bayesian causal inference (Kilteni et al., 2015; Samad et al., 2015). In this framework, an artificial body part becomes integrated into one’s own body when a common cause for multiple sources of information can be inferred, e.g., during synchronous visuotactile stimulation. This formulation can also integrate top-down knowledge, which, together with bottom-up factors, affects the likelihood in the Bayesian inference (Kilteni et al., 2015). Altogether, the different formulations and models have in common that they describe ownership to arise as a consequence of both bottom-up and top-down factors.
Agency is commonly described in a prediction framework, e.g., the comparator model. In this model, agency over actions (based on motor commands) is experienced when the predicted movements (based on efference copy signals) match the sensory feedback associated with that movement, i.e., when no prediction error occurs (Haggard, 2017). Actions are obviously the core element of agency, but they can also be linked to ownership and presence. On the one hand, the representation of actions depends on the classification of the hand as being part of the self or the other (Uhlmann et al., 2020), which suggests that ownership of a body part is important for the representation of actions, and therewith agency. On the other hand, acting in an environment was also suggested to be a crucial element for the sense of presence (Zahorik and Jenison, 1998). In this view, one can only feel present in an environment if one can act in this environment. This link was also emphasised by a model of Seth and colleagues (Seth et al., 2012) that draws parallels between presence and agency. The model describes presence in a predictive coding framework (c.f., Rao and Ballard, 1999), interacting with agency. Presence occurs from comparing predictions of interoceptive information to the actual interoceptive information. As a result, acting in an environment might link the agency component of embodiment and presence.
Presence can be manipulated by various factors, which can broadly be divided in manipulations of the display content, e.g., the avatar or the virtual environment, and hardware properties of the mediation technology, e.g., the HMD. Participants’ VR experience seemed to benefit from having a virtual body in a realistically rendered environment, in which other avatars respond to the participant (Llobera et al., 2021). Although this study did not explicitly investigate presence, the investigated factors were relevant for presence in previous studies (Slater et al., 2010a; Steed et al., 2018). In addition, wearing an HMD with a wide field of view supports participants’ feeling to be in the virtual environment (Slater et al., 2010a; Buttussi and Chittaro, 2018) and their belief that events in this environment are actually happening (Slater et al., 2010a). Similarly, removing motion parallax, which is a depth cue we normally experience in everyday life, decreased presence (Eftekharifar et al., 2020). Many of those factors relate to the properties of the device, which resembles the definition of immersion as properties related to the technology (Slater and Wilbur, 1997).
It was postulated (Bystrom et al., 1999) that immersion determines how much the virtual environment resembles the real environment. For presence to emerge, participants need to direct their attention to the sensory information provided by the technology. As a consequence, they might start to treat the virtual environment as real, which enables participants feeling to be within the virtual environment. Similar ideas have been put forward (Wirth et al., 2007), suggesting that directing attention towards the provided sensory information (e.g., from an HMD) is necessary for the construction of a spatial representation of one’s environment. Spatial presence arises when participants incorporate the spatial reference frame of the virtual environment instead of the one provided by the real environment. Altogether, immersion and attention seem to be core concepts for presence.
In sum, the suggestion of multifaceted interactions between embodiment and presence require a common consideration of both processes (Kilteni et al., 2012a; Nostadt et al., 2020). Relating ourselves to the body on the one hand, and the body to the environment on the other hand, might create a link between embodiment and presence (c.f., Kilteni et al., 2012a). This link might be provided by the body schema, i.e., an unconscious model of the body and its parts (c.f., Maravita and Iriki, 2004). It was argued that the body schema adjusts by incorporating the technology (e.g., the HMD), as a consequence giving access to a virtual environment similar to our natural environment. It thereby enables participants’ feeling to be within the virtual environment (Haans and IJsselsteijn, 2012). Nevertheless, a conceptualisation of a common framework is still missing.
2 A Common Framework of Embodiment and Presence
At the current stage of research, a precise characterisation of embodiment and presence is still missing. Given the possible overlap and interdependencies between the two constructs, we believe that an agreed-upon, formal definition is needed to move the field forward. Here, we propose a conceptual framework of embodiment and presence, the Implied Body Framework (IBF, Section 2.1 and Section 2.2). Presence is thereby conceptualised as the sense to “be there” (e.g., Slater and Steed, 2000; Slater et al., 2010a). The IBF aims to integrate current findings and allows to derive new and testable hypotheses (Section 2.3).
2.1 The Implied Body Framework
Multisensory integration (e.g., Botvinick and Cohen, 1998; Guterstam et al., 2019) is a key component in the IBF (Figure 2). We assume that multisensory information indicates the (possibly implicit) presence of a body, which we call implied body. An implied body is inferred from multisensory correlations. For example, visuomotor correlations between head movements and changes in the visual scene, give rise to an implied body. This shows that the implied body does not require the representation of a (virtual) body (c.f., Guterstam et al., 2015); any multisensory correlation will be sufficient (c.f., Ehrsson et al., 2005; Kalckert and Ehrsson, 2014b). Plausible implied bodies (c.f., Tsakiris, 2010) are integrated into the body representation (Implied body 1 and 2). In this step, the implied body is, for example, assessed with respect to its shape (e.g., Tsakiris et al., 2010), orientation (e.g., Ehrsson et al., 2004), and distance (e.g., Kalckert and Ehrsson, 2014b) from the existing body representation. Embodiment of an entity arises from integrating implied bodies into the body representation, whereas presence relates to the spatial reference point of this body representation.
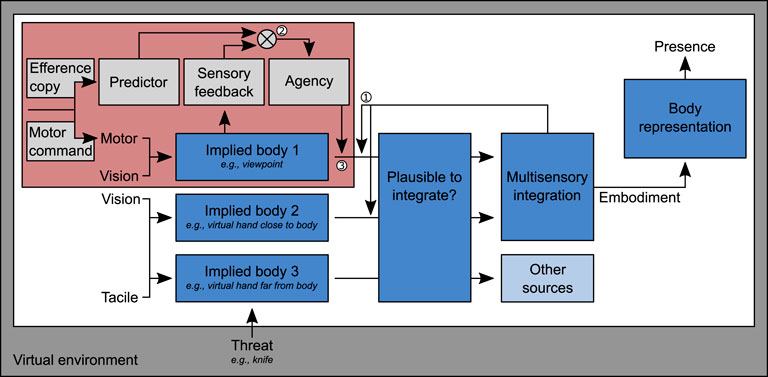
FIGURE 2. The Implied Body Framework (IBF). Embodiment and presence emerge from integrating multisensory signals related to implied bodies. Hereby, multisensory correlations indicate implied bodies. If implied bodies are plausible, multisensory integration links the multisensory correlations into the body representation. As a consequence, entities like a virtual hand can be embodied. Presence arises in connection to the spatial reference point of the body representation. The multisensory integration process also 1) feeds back to the individual implied bodies, making it more likely that the multisensory information becomes integrated in the next iteration. If an implied body is not plausible, it will be experienced as disconnected from one’s own body and multisensory correlations are attributed to other sources. Agency arises from 2) comparing predicted movements to sensory feedback. It is directly linked to some of the implied bodies, 3) increasing the likelihood that sensory signals are passed on to the multisensory integration process. Threat is directed against the implied bodies.
We propose that multisensory integration can enhance or impede the strength of the body representation by 1) weighting implied bodies (Figure 2, feedback arrow). Implied bodies with an increased weight are more likely to pass the plausibility check and to be integrated during the next iteration; thereby strengthening the body representation in the respective environment. A change in the body representation will also affect how strongly we feel present in the respective environment (c.f., Slater et al., 2010a). This effect should be especially strong when multisensory integration enhances or impedes implied bodies which are an important cue for a spatial reference point in the environment. The viewpoint (Implied Body 1) is the visual origin and determines the perspective a participant has in the virtual environment, thereby giving a spatial reference point for where we are located in the environment. Integrating the implied body related to the viewpoint might therefore be especially important for presence (c.f., Gorisse et al., 2017).
According to the IBF, different multisensory correlations lead to different implied bodies. For example, visuomotor correlations create an implied body related to the viewpoint of the participant (Implied body 1), and visuotactile correlations create a second implied body related to a virtual hand being stroked by a brush (Implied body 2). As only plausible implied bodies become integrated, an implied body from multisensory correlations linked to a virtual hand placed far away from one’s own body (Implied body 3) is not integrated into the body representation (c.f., Kalckert and Ehrsson, 2014b). This virtual hand would be perceived as disconnected from one’s own body, and the tactile sensations as caused by another source. Such a phenomenon has been described for somatoparaphrenia (c.f., Jenkinson et al., 2013), where the real arm becomes not integrated with the rest of the body. We propose that multisensory information is integrated in a way that maximises the evidence of the resulting body representation. This is similar to hierarchical Bayesian frameworks, where an artificial hand becomes integrated based on the collected evidence from multisensory correlations (Kilteni et al., 2015; Samad et al., 2015).
Agency (Figure 2, red box) can facilitate the emergence of implied bodies. Actions generate motor input to implied bodies (e.g., as part of visuomotor correlations). In this case, sensory feedback arises from the implied body (Implied Body 1), which is 2) compared to the predicted sensory consequences of the movement, leading to agency when no prediction error occurred (c.f., Haggard, 2017). The status of an implied body is important for agency (c.f., Uhlmann et al., 2020), as it facilitates the feeling to be in control over one’s own body. In addition, experiencing agency indicates that the implied body belongs to one’s own body (c.f., Tsakiris et al., 2006), and it is therefore more likely that it will be integrated with the other implied bodies. Thus, agency interacts with the implied bodies. Most relevant for the body representation is that agency can 3) moderate the processing of the implied bodies, thereby influencing their integration into the body representation.
2.2 The Implied Body Framework Applied to the Virtual Rubber Hand Illusion
To illustrate the IBF, we apply it to a virtual reality RHI experiment (Figure 3). The participant (Figure 3, left) sees a virtual environment using an HMD through which real head movements lead to an updated visual input, similar to what is experienced in real life. These multisensory signals create an implied body (Figure 2, Implied body 1). The head movements are self-generated and based on predictive mechanisms (Figure 2, red box), leading to a sense of agency, which makes it more likely that the implied body connected to those movements gets further processed. In addition to the visuomotor correlations leading to the first implied body, the participant also experiences visuotactile correlations (Implied body 2). The participant sees how a virtual hand close to the viewpoint in VR, is stroked by a virtual brush, while the experimenter (Figure 3, right) is physically stroking the participant’s real hand. Both implied bodies are plausible, and their close proximity indicates that they originate from the same body. The multisensory information is therefore integrated, embodying both implied bodies in a body representation. The feeling of the virtual hand as belonging to the own body emerges. This body representation has a spatial reference point, whereby integrating the visuomotor signals into the body representation gives a strong cue of where one is located in the environment. A sense of spatially belonging to this environment emerges, i.e., the participant feels present in the virtual environment. This suggests that what is commonly reported as presence depends upon (at least implicitly) a body.
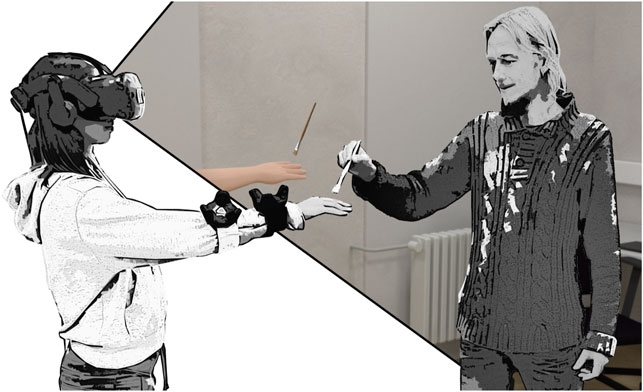
FIGURE 3. Example of a virtual RHI setup. The black and white area depicts the participant (left) and experimenter (right) situated in the real environment. The coloured area represents the virtual environment, which the participant perceives via an HMD. When the experimenter stimulates the participant’s real hand with a brush, the participant sees these brush strokes on a virtual hand in VR. The virtual hand model was taken from turbosquid.com under their standard license.
2.3 Deriving Hypotheses From the Implied Body Framework
2.3.1 Plausibility Only Affects Implied Bodies From Synchronous Multisensory Correlations
The basic assumption of the IBF is the existence of implied bodies. The model suggests that implied bodies can only arise from synchronous multisensory correlations. Implied bodies are integrated into the body representation, if they are plausible, e.g., when the virtual hand resembles the participant’s hand. An implied body cannot emerge from asynchronously stimulating the participant’s hand and a virtual hand. In this case, the implied body will be rejected from integration before passing the check for plausibility. Consequently, the shape of the stimulated virtual hand should be irrelevant, yielding the same results for a realistic hand model or a cube, if asynchronous stimulation was used. However, for synchronous stimulation we would expect that the shape of the simulated hand is important. Thus, although a certain similarity to the participant’s hand is necessary (Tsakiris et al., 2010), personalisation should further increase embodiment (c.f., Waltemate et al., 2018).
2.3.2 Agency Influences the Weight of Implied Bodies
Agency interacts with the implied bodies depending on the motor input. Thereby, the sensory feedback comes from the implied body and is compared against the motor prediction, resulting in agency if no prediction error occurred. Agency again modulates the weight of the implied body, before it reaches the plausibility check. This has two implications. First, agency and embodiment can be dissociated when agency over a limb is experienced, but the implied body did not pass the plausibility check. This is for example the case when a rotated rubber hand moves in accordance with one’s own hand (c.f., Kalckert and Ehrsson, 2012). Second, we would expect that agency hinders or facilitates embodiment depending on the paradigm. For example, agency should sensitise participants for spatial offsets between their hand and an artificial hand (c.f., Kalckert and Ehrsson, 2014b). At the same time, agency might increase the likelihood that the implied body passes the plausibility check, e.g., when the shape of the virtual hand does not fully match.
2.3.3 Feedback From Multisensory Integration Stabilises the Body Representation
When the implied body passes the plausibility check, multisensory integration will link the sensory information, thereby integrating the implied bodies into the body representation. The IBF postulates that multisensory integration scales the weight of the implied bodies, which makes it more likely that the same implied body is part of the body representation in the next iteration. Therefore, the IBF predicts that the embodiment of an entity is not immediately disrupted when the multisensory correlations break down, but slowly declines (c.f., Pfister et al., 2020).
2.3.4 Presence Depends on Embodiment
The embodiment of implied bodies constitutes a body representation, to which presence relates. The IBF therefore understands presence as depending on embodiment processes. Presence cannot arise without at least a basal form of embodiment. If participants feel present when a virtual body was not presented to them, it likely goes along with a basal form of embodiment, e.g., for the implied body from the viewpoint. This dependence suggests that both processes are correlated. However, the direction of the dependence also predicts that there might be situations where participants feel embodied, but not present.
2.3.5 Physiological Measures Confound Embodiment and Presence
A relevant sensory event, e.g., threatening the virtual hand with a knife, can lead to a physiological response, which allows us to measure embodiment and presence or, more specifically, the impact of threat on the implied bodies (Figure 2, Threat). Threat can thereby only elicit a physiological response when the implied body is part of the body representation. Threatening Implied Body 1 or 2 should therefore lead to a physiological response, contrary to threatening Implied body 3. As embodiment and presence depend on the implied bodies, the IBF suggests that it is not possible to separate both processes based on physiological measures related to threat. However, as embodying implied bodies directly constitutes to the body representation, embodiment might be more closely connected to physiological measures than presence.
3 Discussion
Previous work suggests a relation between embodiment and presence. To characterise this relation, we proposed the Implied Body Framework (IBF). This framework postulates the existence of implied bodies, which can be integrated in a body representation, based on multisensory integration. Presence depends on this body representation and therewith on embodiment processes. In the following section, we compare our model to previously introduced models on embodiment and presence (Section 3.1). The IBF provides an important step towards a common consideration of both processes. However, embodiment and presence research might still be prone to different limitations and confounds, which need to be considered. We will therefore conclude by discussing the impact of two important factors that challenge embodiment and presence research: attention (Section 3.2) and biases (Section 3.3).
3.1 Comparing the Implied Body Framework to Existing Models
Similar to existing frameworks (Tsakiris, 2010; Maselli and Slater, 2013), the IBF considers bottom-up (multisensory correlations leading to implied bodies) and top-down influences to be important. As part of top-down influences, implied bodies are checked for their plausibility (e.g., taking the orientation of the virtual hand into account). Compared to previous models, the IBF inversed this order, i.e., only objects providing multisensory correlations are checked for plausibility. This should reduce the computational costs, because otherwise every potential object in the environment would have to be assessed as a potential body part. Increasing the weight of implied bodies by the multisensory integration process can thereby prevent that body parts which do not provide multisensory correlations, are immediately removed from the body representation. In other words, the body representation is stabilised. This influence of multisensory integration on the implied bodies could be described by an updated prior distribution in a Bayesian framework (c.f., Kilteni et al., 2015).
Participants can have a body representation without visually being presented with a body, e.g., an avatar. The implied body from participant’s viewpoint is likely the most important factor for presence; and similarly for embodiment (c.f., Maselli and Slater, 2013). In case of an invisible body, this implied body could be combined with other implied bodies, which are not visual in nature. For example, motor information can still be correlated with observed effects in the environment (e.g., stretching an invisible arm to move a mug) or their tactile consequences (e.g., stretching an invisible arm and feeling the touch of a mug). In addition, we would receive proprioceptive information of our body. Using VR without a virtual body should therefore lead to the feeling to own an invisible body (c.f., Guterstam et al., 2015), accompanied by a feeling of presence in the virtual environment.
Importantly, the IBF closely links presence to embodiment processes by postulating the importance of implied bodies and the body representation for presence. A link of presence to embodiment by incorporating the mediation technology into the body schema was suggested previously (Haans and IJsselsteijn, 2012). The IBF expands on this idea and argues for a direct link between embodiment and presence, based on implied bodies and the body representation. We therefore expect both processes to be positively correlated (c.f., Roth and Latoschik, 2020).
The spatial reference point of the body representation is central to link embodiment and presence. In contrast to a previous model by Wirth et al. (2007), the IBF argues that the spatial reference point to which presence refers to, depends on the implied bodies and the body representation, of which the body is a part, as compared to the spatial reference point encompassing the body itself. Locating ourselves in relation to the body or the environment therefore relies on the same spatial reference point. We will always feel present at this spatial reference point and, at least in most situations, this will be within the body.
A manipulation of the perspective over an avatar, i.e., changing a first-person-perspective to a third-person-perspective, can therefore decrease embodiment, but leave presence unchanged (c.f., Gorisse et al., 2017). Changing the viewpoint to a position outside the virtual body presents participants with an unexpected configuration for a body representation. There is no such conflict for presence, because the viewpoint is a strong location cue, leading to the feeling to be present outside of the own body.
The IBF integrates the comparator model of agency (c.f., Haggard, 2017). Agency is a separate process, interacting with the implied bodies. On the one hand, separate processes for agency and embodiment are in line with findings suggesting a dissociation between agency and ownership (c.f., Kalckert and Ehrsson, 2012). On the other hand, interactions between agency and the implied bodies could explain why embodiment can be induced by visuomotor correlations (e.g., Kalckert and Ehrsson, 2014a). Such motor signals are self-generated, which might have the benefit that attention towards those signals is not necessary to experience them. This is in contrast to other sensory correlations, which might need to be attended for embodiment and presence to emerge.
Immersion (c.f., Bystrom et al., 1999) and attention (c.f., Bystrom et al., 1999; Wirth et al., 2007) were previously proposed to be important for presence. Although the IBF does not directly emphasise these factors, it does not contradict this notion. Immersion is relevant in the context of VR and other mediation technology, while attention is directly relevant in the selection of sensory information. These processes can thereby significantly influence which entities are embodied and where we feel present.
3.2 Attention
Attention is a mechanism which optimises the precision of sensory inputs (Friston, 2009) and can thereby influence, which information enters the multisensory integration process. However, multisensory integration can also facilitate stimulus detection, which links attention and multisensory integration, bidirectionally (Talsma et al., 2010). The selected sensory information is thereby crucial for embodiment and presence.
Healthy humans have an ever-present sense of embodiment over their own limbs, without having to consciously and constantly pay attention to this feeling. The same is true for the sensation to be present within the environment. The question arises, whether humans have to actively attend to multisensory signals (e.g., congruent information from vision and touch) to experience embodiment and presence in experiments like the virtual RHI. One might predict that it would be unlikely for both processes to arise, when attention is drawn away from the virtual body or the virtual environment. Attention could therefore serve as a gateway that enables embodiment and presence. Investigating the effects of attention could provide further insights into the relation between the self, on the one hand, and the body or the environment, on the other hand.
Case studies on somatoparaphrenic patients can provide first evidence for a crucial role of visuospatial attention in the processing of one’s own body (Fotopoulou et al., 2011; Jenkinson et al., 2013). Somatoparaphrenic patients perceive a body part as belonging to someone else. Presenting the patient’s arm in a mirror helps to recognise the disowned arm as the own one by presenting the visual feedback of the body from a third-person perspective (Fotopoulou et al., 2011). This suggests that ownership over the hand does not only depend on seeing one’s own body, but also on the information one is attending to. For example, attending to one’s extrapersonal space seems to improve the patient’s recognition of her own arm, probably due to enhanced processing of the body from a third-person-perspective (Jenkinson et al., 2013). An RHI experiment with healthy controls showed that seeing the rubber hand in a mirror did not affect the strength of the RHI (Jenkinson et al., 2013). However, experiencing touch on the rubber hand benefitted from attending the rubber hand compared to the real hand. Altogether, this suggests that attention may support the occurrence of embodiment by selecting which body-related information (e.g., from first-person-perspective or third-person-perspective) is further processed. This seems to be especially relevant in the context of disorders such as somatoparaphrenia, where attention can promote body self-recognition (Jenkinson et al., 2013). The importance of attention to select sensory input is in line with the IBF.
Attention could be considered as an integral component of presence. To feel present in a virtual environment requires to attend to the stimuli from that environment. Accordingly, switching ones attention from the virtual to the real environment could account for breaks in presence (c.f., Slater and Steed, 2000). Arguably, presence will increase if participants pay attention to the virtual environment (Bystrom et al., 1999), and decrease when distractions, for example noise from the laboratory, are present (see Box 2). In line with the IBF, this suggests that attention can affect presence, which is also supported by the theoretical conceptualisations (Bystrom et al., 1999; Wirth et al., 2007), and the underlying factors influencing presence in the presence questionnaire (Witmer and Singer, 1998). In this questionnaire, involvement (one of the key factors underlying presence) is directly related to attention. Hereby, attention influences involvement, which again influences the degree of perceived presence.
Box 2 | Open Research Questions.
Can visuomotor correlations from head and eye movements be sufficient to induce embodiment and presence? The introduced Implied Body Framework (see Section 2 ) assumes that multisensory correlations (e.g., visuomotor correlations while moving one’s head) lead to the sensation of a body; a sensation that does not need to be visual in nature, i.e., the body is implied. In VR and RHI experiments, participants are allowed to move their head and perceive an updated visual scene. The significance of such visuomotor correlations can be tested as follows: Participants are presented with a virtual environment while all movements, including eye and head movements, are restricted. Embodiment and presence ratings are compared to a second condition, in which they can move their eyes, and a third condition, in which they can move their eyes and head. We expect that participants’ ratings increase with the amount of movement possible: no movement < eye movements < eye and head movements. In a fourth condition, participants fixate a cross at a fixed position on the HMD, i.e., relative to their head, so that their eye movements are fixed in space, but head movements are possible. This would allow to test for the role of eye or head movements on embodiment and presence ratings. In a control condition, participants view visual updates of the scene as a passive observer (no movement). This would inform about the importance of self-generated visual updates of the scene, independent of their origin (eye or head movements).
What alternative experimental methods can be used to measure embodiment and presence? One crucial step would be the development of questionnaires with strong psychometric properties that can be widely used in experimental tasks (c.f., Roth and Latoschik, 2020). These questionnaires need to be combined with additional experimental methods to further increase the validity of the measures and to avoid bias. For example, Chancel and Ehrsson (2020) showed that psychophysical measures of hand ownership are suitable to assess embodiment. In their setup, they presented two rubber hands to the participants. In a two-alternative forced-choice (2AFC) task, participants indicated over which of the two hands they felt ownership. The results show that this task can capture the influence of displacement of the rubber hand on reported ownership. It therefore provides a useful method to answer questions in embodiment and presence research (c.f., Chancel and Ehrsson, 2020; Chancel et al., 2021; Chancel et al., 2022).
Can the sensation of embodiment and presence be influenced by attentional capture? If embodiment and presence are influenced by attention, then it should be possible to increase or decrease the two by manipulating participants’ attention. On the one hand, participants who feel present in an environment seem to dismiss distracting stimuli from the real world (see Section 3.2, Terkildsen and Makransky, 2019). Games like Beat Saber (Beat Saber, Prague) could be used to manipulate the attentional focus by requiring actions in response to stimuli which vary in speed. On the other hand, interfering noise which captures attention should have an adverse effect on embodiment and presence. To test this, distracting stimuli can be introduced which can be ascribed to the laboratory (an experimenter speaking) or the virtual environment (an experimenter speaking who is represented by an avatar).
Are results on embodiment and presence affected by demand characteristics and suggestibility? Demand characteristics and suggestibility are a serious challenge to embodiment and presence research, as outlined above (Section 3.3). So far, demand characteristics have only been investigated for embodiment, but not for presence, where one can apply the same critique. It is important to uncover the role of demand characteristics by using control experiments (Orne, 1962; Lush, 2020). A comparison between an experiment in the laboratory and an experiment in which participants rate their expected sensations after observing another participant performing this experiment, could provide further insides (Orne, 1962). Following a recent approach, suggestibility could be measured by rating experiences during made-up exercises, like imagining acoustic and tactile sensations of a mosquito (Lush et al., 2021a).
If presence depends on attention, one would expect that detecting stimuli from the real environment is attenuated, when the participant feels present in a virtual environment. Accordingly, electrophysiological recordings show that participants experiencing higher presence (physical-, social-, and self-presence) in a desktop game showed lower amplitudes of attention-related event-related potentials (N1 and mismatch negativity) in response to sounds presented in the real environment (Terkildsen and Makransky, 2019). This suggests that participants allocated more attention towards the desktop game, and not towards the external distracting stimuli, which in turn facilitated the feeling of presence. A similar mechanism was also proposed to explain an effect from presence on memory. The authors argued that attention elicits and sustains presence, whereby presence also increases attention towards stimuli from the virtual environment, resulting in attenuating distracting stimuli from the real environment (Makowski et al., 2017).
In line with the IBF, attention is especially relevant for the selection of sensory information. Attention can influence the weighting of sensory information and thereby determine the integration of multisensory information related to the body representation (Limanowski and Friston, 2020). In addition, multisensory integration might link attention and presence: it is known that attention can guide information selection for multisensory integration (Alsius et al., 2007) and presence can benefit from multisensory information (Marucci et al., 2021). Thus, multisensory integration might function at the intersection between attention and presence.
3.3 Methodological and Conceptual Biases
Comparing results from studies on embodiment is a challenging task, as standardisations, e.g., in the design, are missing (Riemer et al., 2019). This could be improved by standardising procedures, e.g., using stimulation devices (Sivasubramaniam et al., 2021). Yet, participants’ responses can still be biased in various ways (e.g., regression to the mean, framing of instructions, or the good-subject effect). To detect biases, researchers often use two sets of items in embodiment research: illusion and control items. For the former, participants rate the extent to which they experienced the illusion. With control items, participants are always expected to give low ratings, because they describe phenomena not expected to occur as a consequence of the experimental manipulations. Similar responses to illusion and control items indicate that participants might show a response bias. An example of a control item is “It seems as if I had more than one right hand” (Kalckert and Ehrsson, 2012, p.4), a sensation which is not expected to appear during the experiment. However, reports of “having more than one right hand” (Ehrsson, 2009; Fan et al., 2021) imply ownership over an additional hand, which questions the validity of such control items. Further, it is arguable whether participants might be able to distinguish control items from illusion items (Lush, 2020), which would introduce a bias even though it was controlled for.
Bias might not be immediately obvious, especially when it produces results in accordance with the hypotheses. In this context, demand characteristics describe the hints passed on to participants which directly relate to the underlying hypotheses (Orne, 1962; Lush, 2020), although this does not necessarily mean that participants guess the hypotheses correctly (Corneille and Lush, 2022). Perceiving demand characteristics can encourage participants to confirm experimental hypotheses (Nichols and Maner, 2008). It is therefore important that experiments are designed in a way to prevent such biases. Normally, experimenters try to hide the hypotheses of their experiments from participants to minimise any kind of hypotheses-confirming behaviour. However, there are a number of ways how experimental hypotheses can become known, including the experiment itself (Orne, 1962). For embodiment and presence research, one might argue that the aim of the study becomes obvious when participants are confronted with the questionnaire items (c.f., Reader, 2022). It might be easy to guess at experimental manipulations, for example, a sensation to own a virtual body, and whether this sensation should be enhanced or decreased. To avoid any drawbacks from demand characteristics, participants could be asked about the purpose of the experiment afterwards (Orne, 1962). Another possibility is the design of an additional experiment that only describes the experimental procedures and then assesses the participants’ expected response on the same experimental measures (Orne, 1962). While the first option might invalidate the experimental approach, the second option can directly test if the experimental design is prone to demand characteristics. The latter approach was recently followed up in a study that examined the effect of demand characteristics in the RHI (Lush, 2020). In an online experiment, participants watched a video and read the descriptions of a typical RHI experiment, and then filled out one of the frequently used RHI questionnaires. The results of this experiment were similar to the results revealed in other RHI studies, which indicates that participants were indeed able to correctly guess the purpose of the experiment, even when they were absolutely naïve about the experimental interests (see also, Lush et al., 2021b; Reader, 2022). Therefore, it is likely that previous results are affected by demand characteristics questioning their validity.
Suggestibility, i.e., participants liability to experience induced sensations, might govern their perception (as well as the associated behaviour and measured responses) in accordance with the research hypotheses (Lush, 2020). In other words, participants’ susceptibility to respond to the perceived demands and to change their experience accordingly can influence, and even predict the extent of the RHI (Lush et al., 2020; Roseboom and Lush, 2022). This effect of suggestibility can be observed for questionnaires (Marotta et al., 2016; Fiorio et al., 2020; Lush et al., 2020) and proprioceptive drift (Walsh et al., 2015; Fiorio et al., 2020; Lush et al., 2020). However, these effects are not always replicated for all measures (Walsh et al., 2015; Marotta et al., 2016), which might depend on differences in the measures or the experimental design. These results show that suggestibility can affect results in embodiment (and likely presence) experiments, possibly even without reaching awareness (for an ongoing debate, see Ehrsson et al., 2022; Lush and Seth, 2022).
To reduce the confounding effects of demand characteristics and suggestibility on embodiment and presence, effective control measures are needed (Lush, 2020). Commonly used control items and measures known to be objective (e.g., electrodermal activity and proprioceptive drift) might be insufficient (Lush et al., 2021b). It is therefore important to explore how research methodology can be further improved (Box 2).
4 Conclusion
More than 20 years after the first influential paper on the RHI (Botvinick and Cohen, 1998), we are closer than ever to applying the concepts of embodiment and presence to rehabilitation, training, or gaming purposes, especially due to the rise of virtual reality technology. However, the lack of a common framework, valid measures, and bias-free designs pose a serious challenge. We are at the cusp of deciding which direction to take in embodiment and presence research. The large amount of overlap concerning theory and findings in embodiment and presence literature makes the case for a common framework. To this end, we introduced the Implied Body Framework (IBF). This framework proposes that multisensory signals can constitute multiple implied bodies, which can be embodied into one body representation. This body representation provides a spatial reference point for presence. With the IBF, we aim to foster new perspectives for future research and their application.
Author Contributions
PPF and HK conceptualised the Implied Body Framework. PPF provided an initial draft and wrote the manuscript. HK and KF revised and wrote the manuscript. PPF designed and created, HK revised the figures.
Funding
This work was funded by the German Research Foundation, International Research Training Group, IRTG 1901, “The Brain in Action” and by “The Adaptive Mind”, funded by the Excellence Program of the Hessian Ministry of Higher Education, Research, Science and the Arts.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
We would like to thank Bianca Baltaretu for providing feedback to the manuscript and Meaghan McManus for feedback to the Implied Body Framework.
References
Abdulkarim, Z., and Ehrsson, H. H. (2016). No Causal Link Between Changes in Hand Position Sense and Feeling of Limb Ownership in the Rubber Hand Illusion. Atten. Percept. Psychophys. 78, 707–720. doi:10.3758/s13414-015-1016-0
Alsius, A., Navarra, J., and Soto-Faraco, S. (2007). Attention to Touch Weakens Audiovisual Speech Integration. Exp. Brain Res. 183, 399–404. doi:10.1007/s00221-007-1110-1
Barbin, J., Seetha, V., Casillas, J. M., Paysant, J., and Pérennou, D. (2016). The Effects of Mirror Therapy on Pain and Motor Control of Phantom Limb in Amputees: A Systematic Review. Ann. Phys. Rehabilitation Med. 59, 270–275. doi:10.1016/j.rehab.2016.04.001
Botvinick, M., and Cohen, J. (1998). Rubber Hands ‘Feel' Touch That Eyes See. Nature 391, 756. doi:10.1038/35784
Buttussi, F., and Chittaro, L. (2018). Effects of Different Types of Virtual Reality Display on Presence and Learning in a Safety Training Scenario. IEEE Trans. Vis. Comput. Graph. 24, 1063–1076. doi:10.1109/TVCG.2017.2653117
Bystrom, K.-E., Barfield, W., and Hendrix, C. (1999). A Conceptual Model of the Sense of Presence in Virtual Environments. Presence Teleoperators Virtual Environ. 8, 241–244. doi:10.1162/105474699566107
Chancel, M., Ehrsson, H. H., and Ma, W. J. (2022). Uncertainty-Based Inference of a Common Cause for Body Ownership. OSF Preprints [Preprint]. doi:10.31219/osf.io/yh2z7
Chancel, M., and Ehrsson, H. H. (2020). Which Hand Is Mine? Discriminating Body Ownership Perception in a Two-Alternative Forced-Choice Task. Atten. Percept. Psychophys. 82, 4058–4083. doi:10.3758/s13414-020-02107-x
Chancel, M., Hasenack, B., and Ehrsson, H. H. (2021). Integration of Predictions and Afferent Signals in Body Ownership. Cognition 212, 104722. doi:10.1016/j.cognition.2021.104722
Corneille, O., and Lush, P. (2022). Sixty Years after Orne’s American Psychologist Article: A Conceptual Analysis of “Demand Characteristics”. PsyArXiv [Preprint]. doi:10.31234/osf.io/jqyvx
Crucianelli, L., Metcalf, N. K., Fotopoulou, A., and Jenkinson, P. M. (2013). Bodily Pleasure Matters: Velocity of Touch Modulates Body Ownership During the Rubber Hand Illusion. Front. Psychol. 4, 703. doi:10.3389/fpsyg.2013.00703
de Vignemont, F. (2011). Embodiment, Ownership and Disownership. Conscious. Cognition 20, 82–93. doi:10.1016/j.concog.2010.09.004
Eftekharifar, S., Thaler, A., and Troje, N. F. (2020). Contribution of Motion Parallax and Stereopsis to the Sense of Presence in Virtual Reality. J. Percept. Imaging 3, 20502-1–20502-10. doi:10.2352/j.percept.imaging.2020.3.2.020502
Ehrsson, H. H., Fotopoulou, A., Radziun, D., Longo, M. R., and Tsakiris, M. (2022). No Specific Relationship Between Hypnotic Suggestibility and the Rubber Hand Illusion. Nat. Commun. 13, 564. doi:10.1038/s41467-022-28177-z
Ehrsson, H. H., Holmes, N. P., and Passingham, R. E. (2005). Touching a Rubber Hand: Feeling of Body Ownership Is Associated with Activity in Multisensory Brain Areas. J. Neurosci. 25, 10564–10573. doi:10.1523/JNEUROSCI.0800-05.2005
Ehrsson, H. H. (2009). How Many Arms Make a Pair? Perceptual Illusion of Having an Additional Limb. Perception 38, 310–312. doi:10.1068/p6304
Ehrsson, H. H., Rosén, B., Stockselius, A., Ragnö, C., Köhler, P., and Lundborg, G. (2008). Upper Limb Amputees Can Be Induced to Experience a Rubber Hand as Their Own. Brain 131, 3443–3452. doi:10.1093/brain/awn297
Ehrsson, H. H., Spence, C., and Passingham, R. E. (2004). That's My Hand! Activity in Premotor Cortex Reflects Feeling of Ownership of a Limb. Science 305, 875–877. doi:10.1126/science.1097011
Ehrsson, H. H. (2007). The Experimental Induction of Out-Of-Body Experiences. Science 317, 1048. doi:10.1126/science.1142175
Fan, C., Coppi, S., and Ehrsson, H. H. (2021). The Supernumerary Rubber Hand Illusion Revisited: Perceived Duplication of Limbs and Visuotactile Events. J. Exp. Psychol. Hum. Percept. Perform. 47, 810–829. doi:10.1037/xhp0000904
Fiorio, M., Modenese, M., and Cesari, P. (2020). The Rubber Hand Illusion in Hypnosis Provides New Insights into the Sense of Body Ownership. Sci. Rep. 10, 5706. doi:10.1038/s41598-020-62745-x
Fotopoulou, A., Jenkinson, P. M., Tsakiris, M., Haggard, P., Rudd, A., and Kopelman, M. D. (2011). Mirror-View Reverses Somatoparaphrenia: Dissociation Between First- and Third-Person Perspectives on Body Ownership. Neuropsychologia 49, 3946–3955. doi:10.1016/j.neuropsychologia.2011.10.011
Fribourg, R., Argelaguet, F., Lécuyer, A., and Hoyet, L. (2020). Avatar and Sense of Embodiment: Studying the Relative Preference Between Appearance, Control and Point of View. IEEE Trans. Vis. Comput. Graph. 26, 2062–2072. doi:10.1109/TVCG.2020.2973077
Friston, K. (2009). The Free-Energy Principle: A Rough Guide to the Brain? Trends Cognitive Sci. 13, 293–301. doi:10.1016/j.tics.2009.04.005
Fuchs, X., Riemer, M., Diers, M., Flor, H., and Trojan, J. (2016). Perceptual Drifts of Real and Artificial Limbs in the Rubber Hand Illusion. Sci. Rep. 6, 24362. doi:10.1038/srep24362
Galvan Debarba, H., Bovet, S., Salomon, R., Blanke, O., Herbelin, B., and Boulic, R. (2017). Characterizing First and Third Person Viewpoints and Their Alternation for Embodied Interaction in Virtual Reality. PLoS One 12, e0190109. doi:10.1371/journal.pone.0190109
Gorisse, G., Christmann, O., Amato, E. A., and Richir, S. (2017). First- and Third-Person Perspectives in Immersive Virtual Environments: Presence and Performance Analysis of Embodied Users. Front. Robot. AI 4, 33. doi:10.3389/frobt.2017.00033
Grassini, S., and Laumann, K. (2020). Questionnaire Measures and Physiological Correlates of Presence: A Systematic Review. Front. Psychol. 11, 349. doi:10.3389/fpsyg.2020.00349
Guterstam, A., Abdulkarim, Z., and Ehrsson, H. H. (2015). Illusory Ownership of an Invisible Body Reduces Autonomic and Subjective Social Anxiety Responses. Sci. Rep. 5, 9831. doi:10.1038/srep09831
Guterstam, A., Larsson, D. E. O., Zeberg, H., and Ehrsson, H. H. (2019). Multisensory Correlations-Not Tactile Expectations-Determine the Sense of Body Ownership. PLoS One 14, e0213265. doi:10.1371/journal.pone.0213265
Haans, A., and IJsselsteijn, W. A. (2012). Embodiment and Telepresence: Toward a Comprehensive Theoretical Framework. Interact. Comput. 24, 211–218. doi:10.1016/j.intcom.2012.04.010
Haggard, P. (2017). Sense of Agency in the Human Brain. Nat. Rev. Neurosci. 18, 196–207. doi:10.1038/nrn.2017.14
Holle, H., McLatchie, N., Maurer, S., and Ward, J. (2011). Proprioceptive Drift Without Illusions of Ownership for Rotated Hands in the “Rubber Hand Illusion” Paradigm. Cogn. Neurosci. 2, 171–178. doi:10.1080/17588928.2011.603828
Jenkinson, P. M., Haggard, P., Ferreira, N. C., and Fotopoulou, A. (2013). Body Ownership and Attention in the Mirror: Insights from Somatoparaphrenia and the Rubber Hand Illusion. Neuropsychologia 51, 1453–1462. doi:10.1016/j.neuropsychologia.2013.03.029
Kalckert, A., and Ehrsson, H. H. (2012). Moving a Rubber Hand that Feels Like Your Own: A Dissociation of Ownership and Agency. Front. Hum. Neurosci. 6, 40. doi:10.3389/fnhum.2012.00040
Kalckert, A., and Ehrsson, H. H. (2014a). The Moving Rubber Hand Illusion Revisited: Comparing Movements and Visuotactile Stimulation to Induce Illusory Ownership. Conscious. Cognition 26, 117–132. doi:10.1016/j.concog.2014.02.003
Kalckert, A., and Ehrsson, H. H. (2014b). The Spatial Distance Rule in the Moving and Classical Rubber Hand Illusions. Conscious. Cognition 30, 118–132. doi:10.1016/j.concog.2014.08.022
Kilteni, K., Groten, R., and Slater, M. (2012a). The Sense of Embodiment in Virtual Reality. Presence Teleoperators Virtual Environ. 21, 373–387. doi:10.1162/PRES_a_00124
Kilteni, K., Maselli, A., Kording, K. P., and Slater, M. (2015). Over My Fake Body: Body Ownership Illusions for Studying the Multisensory Basis of Own-Body Perception. Front. Hum. Neurosci. 9, 141. doi:10.3389/fnhum.2015.00141
Kilteni, K., Normand, J.-M., Sanchez-Vives, M. V., and Slater, M. (2012b). Extending Body Space in Immersive Virtual Reality: A Very Long Arm Illusion. PLoS One 7, e40867. doi:10.1371/journal.pone.0040867
Kokkinara, E., Kilteni, K., Blom, K. J., and Slater, M. (2016). First Person Perspective of Seated Participants Over a Walking Virtual Body Leads to Illusory Agency Over the Walking. Sci. Rep. 6, 28879. doi:10.1038/srep28879
Lee, K. M. (2004). Presence, Explicated. Commun. Theory 14, 27–50. doi:10.1111/j.1468-2885.2004.tb00302.x
Limanowski, J., and Friston, K. (2020). Attentional Modulation of Vision Versus Proprioception During Action. Cereb. Cortex 30, 1637–1648. doi:10.1093/cercor/bhz192
Ling, Y., Nefs, H. T., Morina, N., Heynderickx, I., and Brinkman, W.-P. (2014). A Meta-Analysis on the Relationship Between Self-Reported Presence and Anxiety in Virtual Reality Exposure Therapy for Anxiety Disorders. PLoS One 9, e96144. doi:10.1371/journal.pone.0096144
Llobera, J., Beacco, A., Oliva, R., Şenel, G., Banakou, D., and Slater, M. (2021). Evaluating Participant Responses to a Virtual Reality Experience Using Reinforcement Learning. R. Soc. Open Sci. 8, 210537. doi:10.1098/rsos.210537
Longo, M. R., Schüür, F., Kammers, M. P. M., Tsakiris, M., and Haggard, P. (2008). What Is Embodiment? A Psychometric Approach. Cognition 107, 978–998. doi:10.1016/j.cognition.2007.12.004
Lush, P., Botan, V., Scott, R. B., Seth, A. K., Ward, J., and Dienes, Z. (2020). Trait Phenomenological Control Predicts Experience of Mirror Synaesthesia and the Rubber Hand Illusion. Nat. Commun. 11, 4853. doi:10.1038/s41467-020-18591-6
Lush, P. (2020). Demand Characteristics Confound the Rubber Hand Illusion. Collabra Psychol. 6, 22. doi:10.1525/collabra.325
Lush, P., Scott, R. B., Seth, A. K., and Dienes, Z. (2021a). The Phenomenological Control Scale: Measuring the Capacity for Creating Illusory Nonvolition, Hallucination and Delusion. Collabra Psychol. 7, 29542. doi:10.1525/collabra.29542
Lush, P., Seth, A. K., and Dienes, Z. (2021b). Hypothesis Awareness Confounds Asynchronous Control Conditions in Indirect Measures of the Rubber Hand Illusion. R. Soc. open Sci. 8, 210911. doi:10.1098/rsos.210911
Lush, P., and Seth, A. K. (2022). Reply to: No Specific Relationship Between Hypnotic Suggestibility and the Rubber Hand Illusion. Nat. Commun. 13, 563. doi:10.1038/s41467-022-28178-y
Ma, K., Qu, J., Yang, L., Zhao, W., and Hommel, B. (2021). Explicit and Implicit Measures of Body Ownership and Agency: Affected by the Same Manipulations and Yet Independent. Exp. Brain Res. 239, 2159–2170. doi:10.1007/s00221-021-06125-5
Makowski, D., Sperduti, M., Nicolas, S., and Piolino, P. (2017). “Being There” and Remembering it: Presence Improves Memory Encoding. Conscious. Cognition 53, 194–202. doi:10.1016/j.concog.2017.06.015
Maravita, A., and Iriki, A. (2004). Tools for the Body (Schema). Trends Cognitive Sci. 8, 79–86. doi:10.1016/j.tics.2003.12.008
Marotta, A., Tinazzi, M., Cavedini, C., Zampini, M., and Fiorio, M. (2016). Individual Differences in the Rubber Hand Illusion Are Related to Sensory Suggestibility. PLoS One 11, e0168489. doi:10.1371/journal.pone.0168489
Marucci, M., Di Flumeri, G., Borghini, G., Sciaraffa, N., Scandola, M., Pavone, E. F., et al. (2021). The Impact of Multisensory Integration and Perceptual Load in Virtual Reality Settings on Performance, Workload and Presence. Sci. Rep. 11, 4831. doi:10.1038/s41598-021-84196-8
Maselli, A., and Slater, M. (2013). The Building Blocks of the Full Body Ownership Illusion. Front. Hum. Neurosci. 7, 83. doi:10.3389/fnhum.2013.00083
Meehan, M., Insko, B., Whitton, M., and Brooks, F. P. (2002). Physiological Measures of Presence in Stressful Virtual Environments. ACM Trans. Graph. 21, 645–652. doi:10.1145/566654.566630
Minsky, M. (2010). Marvin Minsky's Telepresence Manifesto, IEEE Spectr [Online], 31 August 2010. Available at: https://spectrum.ieee.org/telepresence-a-manifesto. (Accessed December 15, 2021).
Murcia-López, M., Collingwoode-Williams, T., Steptoe, W., Schwartz, R., Loving, T. J., and Slater, M. (2020). “Evaluating Virtual Reality Experiences through Participant Choices,” in 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Atlanta, GA, USA, 22-26 March 2020. Editor L. O’Conner (IEEE Computer Society), 747–755. doi:10.1109/vr46266.2020.00098
Nichols, A. L., and Maner, J. K. (2008). The Good-Subject Effect: Investigating Participant Demand Characteristics. J. General Psychol. 135, 151–166. doi:10.3200/GENP.135.2.151-166
Nostadt, N., Abbink, D. A., Christ, O., and Beckerle, P. (2020). Embodiment, Presence, and Their Intersections: Teleoperation and Beyond. ACM Trans. Hum.-Rob Interact. 9, 1–19. doi:10.1145/3389210
O’Kane, S. H., and Ehrsson, H. H. (2021). The Contribution of Stimulating Multiple Body Parts Simultaneously to the Illusion of Owning an Entire Artificial Body. PLoS One 16, e0233243. doi:10.1371/journal.pone.0233243
Orne, M. T. (1962). On the Social Psychology of the Psychological Experiment: With Particular Reference to Demand Characteristics and Their Implications. Am. Psychol. 17, 776–783. doi:10.1037/h0043424
Pan, Y., and Steed, A. (2019). How Foot Tracking Matters: The Impact of an Animated Self-Avatar on Interaction, Embodiment and Presence in Shared Virtual Environments. Front. Robot. AI 6, 104. doi:10.3389/frobt.2019.00104
Peperkorn, H. M., Diemer, J., and Mühlberger, A. (2015). Temporal Dynamics in the Relation Between Presence and Fear in Virtual Reality. Comput. Hum. Behav. 48, 542–547. doi:10.1016/j.chb.2015.02.028
Petkova, V. I., and Ehrsson, H. H. (2008). If I Were You: Perceptual Illusion of Body Swapping. PLoS One 3, e3832. doi:10.1371/journal.pone.0003832
Pfister, R., Klaffehn, A. L., Kalckert, A., Kunde, W., and Dignath, D. (2020). How to Lose a Hand: Sensory Updating Drives Disembodiment. Psychon. Bull. Rev. 28, 827–833. doi:10.3758/s13423-020-01854-0
Preuss, N., and Ehrsson, H. H. (2019). Full-Body Ownership Illusion Elicited by Visuo-Vestibular Integration. J. Exp. Psychol. Hum. Percept. Perform. 45, 209–223. doi:10.1037/xhp0000597
Qu, J., Ma, K., and Hommel, B. (2021). Cognitive Load Dissociates Explicit and Implicit Measures of Body Ownership and Agency. Psychon. Bull. Rev. 28, 1567–1578. doi:10.3758/s13423-021-01931-y
Ramachandran, V. S., and Rogers-Ramachandran, D. (1996). Synaesthesia in Phantom Limbs Induced with Mirrors. Proc. R. Soc. Lond. B 263, 377–386. doi:10.1098/rspb.1996.0058
Rao, R. P. N., and Ballard, D. H. (1999). Predictive Coding in the Visual Cortex: A Functional Interpretation of Some Extra-Classical Receptive-Field Effects. Nat. Neurosci. 2, 79–87. doi:10.1038/4580
Reader, A. T. (2022). What Do Participants Expect to Experience in the Rubber Hand Illusion? A Conceptual Replication of Lush. PsyArXiv [Preprint]. doi:10.31234/osf.io/d8x9y
Riemer, M., Trojan, J., Beauchamp, M., and Fuchs, X. (2019). The Rubber Hand Universe: On the Impact of Methodological Differences in the Rubber Hand Illusion. Neurosci. Biobehav. Rev. 104, 268–280. doi:10.1016/j.neubiorev.2019.07.008
Rohde, M., Di Luca, M., and Ernst, M. O. (2011). The Rubber Hand Illusion: Feeling of Ownership and Proprioceptive Drift Do Not Go Hand in Hand. PLoS One 6, e21659. doi:10.1371/journal.pone.0021659
Roseboom, W., and Lush, P. (2022). Serious Problems with Interpreting Rubber Hand “Illusion” Experiments. Collabra Psychol. 8, 32274. doi:10.1525/collabra.32274
Roth, D., and Latoschik, M. E. (2020). Construction of the Virtual Embodiment Questionnaire (VEQ). IEEE Trans. Vis. Comput. Graph. 26, 3546–3556. doi:10.1109/TVCG.2020.3023603
Samad, M., Chung, A. J., and Shams, L. (2015). Perception of Body Ownership Is Driven by Bayesian Sensory Inference. PLoS One 10, e0117178. doi:10.1371/journal.pone.0117178
Schubert, T., Friedmann, F., and Regenbrecht, H. (2001). The Experience of Presence: Factor Analytic Insights. Presence Teleoperators Virtual Environ. 10, 266–281. doi:10.1162/105474601300343603
Schwind, V., Halbhuber, D., Fehle, J., Sasse, J., Pfaffelhuber, A., Tögel, C., et al. (2020). “The Effects of Full-Body Avatar Movement Predictions in Virtual Reality Using Neural Networks,” in VRST '20: 26th ACM Symposium on Virtual Reality Software and Technology, Canada, 1-4 November 2020, 28, 1–11. doi:10.1145/3385956.3418941
Seth, A. K., Suzuki, K., and Critchley, H. D. (2012). An Interoceptive Predictive Coding Model of Conscious Presence. Front. Psychol. 2, 395. doi:10.3389/fpsyg.2011.00395
Sheridan, T. B. (1992). Musings on Telepresence and Virtual Presence. Presence 1, 120–126. doi:10.1162/pres.1992.1.1.120
Sivasubramaniam, A. K., Ng, J.-H., Chan, H., Yang, J. K. Y., and Kalckert, A. (2021). The Super-Stroker-An Open-Source Tool to Induce the Rubber Hand Illusion. Psychol. Conscious. Theory, Res. Pract., 1–10. doi:10.1037/cns0000284
Slater, M. (2004). How Colorful Was Your Day? Why Questionnaires Cannot Assess Presence in Virtual Environments. Presence 13, 484–493. doi:10.1162/1054746041944849
Slater, M., Khanna, P., Mortensen, J., and Yu, I. (2009). Visual Realism Enhances Realistic Response in an Immersive Virtual Environment. IEEE Comput. Grap. Appl. 29, 76–84. doi:10.1109/MCG.2009.55
Slater, M. (2009). Place Illusion and Plausibility Can Lead to Realistic Behaviour in Immersive Virtual Environments. Phil. Trans. R. Soc. B 364, 3549–3557. doi:10.1098/rstb.2009.0138
Slater, M., Sadagic, A., Usoh, M., and Schroeder, R. (2000). Small-Group Behavior in a Virtual and Real Environment: A Comparative Study. Presence 9, 37–51. doi:10.1162/105474600566600
Slater, M., Spanlang, B., and Corominas, D. (2010a). Simulating Virtual Environments within Virtual Environments as the Basis for a Psychophysics of Presence. ACM Trans. Graph. 29, 1–9. doi:10.1145/1778765.1778829
Slater, M., Spanlang, B., Sanchez-Vives, M. V., and Blanke, O. (2010b). First Person Experience of Body Transfer in Virtual Reality. PLoS One 5, e10564. doi:10.1371/journal.pone.0010564
Slater, M., and Steed, A. (2000). A Virtual Presence Counter. Presence 9, 413–434. doi:10.1162/105474600566925
Slater, M., and Wilbur, S. (1997). A Framework for Immersive Virtual Environments (FIVE): Speculations on the Role of Presence in Virtual Environments. Presence 6, 603–616. doi:10.1162/pres.1997.6.6.603
Souza, V., Maciel, A., Nedel, L., and Kopper, R. (2021). Measuring Presence in Virtual Environments: A Survey. ACM Comput. Surv. 54, 163. doi:10.1145/3466817
Steed, A., Frlston, S., Lopez, M. M., Drummond, J., Pan, Y., and Swapp, D. (2016). An ‘In the Wild' Experiment on Presence and Embodiment Using Consumer Virtual Reality Equipment. IEEE Trans. Vis. Comput. Graph. 22, 1406–1414. doi:10.1109/TVCG.2016.2518135
Steed, A., Pan, Y., Watson, Z., and Slater, M. (2018). “We Wait”-The Impact of Character Responsiveness and Self Embodiment on Presence and Interest in an Immersive News Experience. Front. Robot. AI 5, 112. doi:10.3389/frobt.2018.00112
Talsma, D., Senkowski, D., Soto-Faraco, S., and Woldorff, M. G. (2010). The Multifaceted Interplay Between Attention and Multisensory Integration. Trends Cognitive Sci. 14, 400–410. doi:10.1016/j.tics.2010.06.008
Terkildsen, T., and Makransky, G. (2019). Measuring Presence in Video Games: An Investigation of the Potential Use of Physiological Measures as Indicators of Presence. Int. J. Hum. Comput. Stud. 126, 64–80. doi:10.1016/j.ijhcs.2019.02.006
Tsakiris, M., Carpenter, L., James, D., and Fotopoulou, A. (2010). Hands Only Illusion: Multisensory Integration Elicits Sense of Ownership for Body Parts but Not for Non-Corporeal Objects. Exp. Brain Res. 204, 343–352. doi:10.1007/s00221-009-2039-3
Tsakiris, M. (2010). My Body in the Brain: A Neurocognitive Model of Body-Ownership. Neuropsychologia 48, 703–712. doi:10.1016/j.neuropsychologia.2009.09.034
Tsakiris, M., Prabhu, G., and Haggard, P. (2006). Having a Body Versus Moving Your Body: How Agency Structures Body-Ownership. Conscious. Cognition 15, 423–432. doi:10.1016/j.concog.2005.09.004
Uhlmann, L., Pazen, M., van Kemenade, B. M., Steinsträter, O., Harris, L. R., Kircher, T., et al. (2020). Seeing Your Own or Someone Else's Hand Moving in Accordance with Your Action: The Neural Interaction of Agency and Hand Identity. Hum. Brain Mapp. 41, 2474–2489. doi:10.1002/hbm.24958
Usoh, M., Catena, E., Arman, S., and Slater, M. (2000). Using Presence Questionnaires in Reality. Presence 9, 497–503. doi:10.1162/105474600566989
Walsh, E., Guilmette, D. N., Longo, M. R., Moore, J. W., Oakley, D. A., Halligan, P. W., et al. (2015). Are You Suggesting That's My Hand? The Relation Between Hypnotic Suggestibility and the Rubber Hand Illusion. Perception 44, 709–723. doi:10.1177/0301006615594266
Waltemate, T., Gall, D., Roth, D., Botsch, M., and Latoschik, M. E. (2018). The Impact of Avatar Personalization and Immersion on Virtual Body Ownership, Presence, and Emotional Response. IEEE Trans. Vis. Comput. Graph. 24, 1643–1652. doi:10.1109/TVCG.2018.2794629
Wang, F., Zhang, R., Zhang, J., Li, D., Wang, Y., Yang, Y.-H., et al. (2021). Effects of Mirror Therapy on Phantom Limb Sensation and Phantom Limb Pain in Amputees: A Systematic Review and Meta-Analysis of Randomized Controlled Trials. Clin. Rehabil. 35, 1710–1721. doi:10.1177/02692155211027332
Wirth, W., Hartmann, T., Böcking, S., Vorderer, P., Klimmt, C., Schramm, H., et al. (2007). A Process Model of the Formation of Spatial Presence Experiences. Media Psychol. 9, 493–525. doi:10.1080/15213260701283079
Witmer, B. G., and Singer, M. J. (1998). Measuring Presence in Virtual Environments: A Presence Questionnaire. Presence 7, 225–240. doi:10.1162/105474698565686
Wolf, E., Schüler, T., and Morisse, K. (2020). “Impact of Virtual Embodiment on the Perception of Virtual Heights,” in Augmented Reality and Virtual Reality: Changing Realities in a Dynamic World. Editors T. Jung, M. C. T. Dieck, and P. A. Rauschnabel (Cham, Switzerland: Springer Nature Switzerland AG), 197–211. doi:10.1007/978-3-030-37869-1_17
Yu, I., Mortensen, J., Khanna, P., Spanlang, B., and Slater, M. (2012). Visual Realism Enhances Realistic Response in an Immersive Virtual Environment - Part 2. IEEE Comput. Grap. Appl. 32, 36–45. doi:10.1109/MCG.2012.121
Keywords: body ownership, rubber hand illusion, implied body framework, demand characteristics, virtual reality, presence
Citation: Forster P-P, Karimpur H and Fiehler K (2022) Why we Should Rethink Our Approach to Embodiment and Presence. Front. Virtual Real. 3:838369. doi: 10.3389/frvir.2022.838369
Received: 17 December 2021; Accepted: 19 April 2022;
Published: 04 July 2022.
Edited by:
Doug A. Bowman, Virginia Tech, United StatesReviewed by:
Richard Skarbez, La Trobe University, AustraliaDaniel Roth, University of Erlangen Nuremberg, Germany
Copyright © 2022 Forster, Karimpur and Fiehler. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Katja Fiehler, a2F0amEuZmllaGxlckBwc3ljaG9sLnVuaS1naWVzc2VuLmRl