 Eduardo Alvarado
Eduardo Alvarado Chloé Paliard 2
Chloé Paliard 2 Damien Rohmer
Damien Rohmer - 1LIX, Ecole Polytechnique/CNRS, Institut Polytechnique de Paris, Palaiseau, France
- 2LTCI, Télécom Paris, Institut Polytechnique de Paris, Palaiseau, France
When we move on snow, sand, or mud, the ground deforms under our feet, immediately affecting our gait. We propose a physically based model for computing such interactions in real time, from only the kinematic motion of a virtual character. The force applied by each foot on the ground during contact is estimated from the weight of the character, its current balance, the foot speed at the time of contact, and the nature of the ground. We rely on a standard stress-strain relationship to compute the dynamic deformation of the soil under this force, where the amount of compression and lateral displacement of material are, respectively, parameterized by the soil’s Young modulus and Poisson ratio. The resulting footprint is efficiently applied to the terrain through procedural deformations of refined terrain patches, while the addition of a simple controller on top of a kinematic character enables capturing the effect of ground deformation on the character’s gait. As our results show, the resulting footprints greatly improve visual realism, while ground compression results in consistent changes in the character’s motion. Readily applicable to any locomotion gait and soft soil material, our real-time model is ideal for enhancing the visual realism of outdoor scenes in video games and virtual reality applications.
1 Introduction
Natural environments present a major challenge when it comes to animating characters in real time, e.g., for video games or virtual-reality applications. Indeed, the diverse conditions that characters may encounter when they move in such environments, from different soil types such as sand or snow to additional flexible elements such as vegetation, give rise to a wide range of possible reactions from the environment and deeply affect characters’ motion. Often neglected, this two-way interaction is a major source of non-realism in current applications.
Although considerable efforts have recently been devoted to the use of modern learning methods (deep learning and/or reinforcement learning) to improve character animation, motion usually takes place on rigid grounds. Indeed, the high-dimensional data needed to capture the interaction with various soft grounds would be much more difficult to acquire, and the training of the animation model would be much more intricate in the context of such a dynamic environment.
While standard simulation methods for soft materials could, in theory, be used to solve the two-way interaction between a character and soft grounds in a predictive way, such methods would only be applicable to simulated, physically based characters and may not be usable in real-time applications.
In this work, we address the problem of generating real-time character animation on dynamic, soft grounds, such as sand, snow, soil, or mud. In order to achieve this, two challenges need to be solved: enhancing a standard, kinematic locomotion model to make it adaptive to non-flat terrains and providing a light yet generic ground model, able to react in real time to local interactions while capturing a wide variety of ground behaviors (compressible or not, wet or dry, etc.). Our solution is therefore twofold: we enhance the locomotion model with a global controller that affects a high level, rigid body representation of the character and adds balancing and tilting behaviors to the predefined, forward kinematic animation and we introduce a minimal, physically based model for soft grounds based on a linear strain-stress relationship, associated with a novel way to convert the kinematic state of the character when a foot hits the ground into a plausible interaction force over time. Computing the right interaction force, the function of both foot velocity and the portion of the character weight put there yields the right amount of ground compression and directly leads to a plausible change of subsequent character motion. Moreover, the visually plausible footprints resulting from this interaction are generated without disrupting real-time performance.
We claim the following contributions:
• An enhanced real-time locomotion model that combines a global controller, enabling tilting and balancing behaviors, to an input IK animation, making it adaptable to non-flat terrains (note that we already introduced this model in Paliard et al. (2021).
• A lightweight force model for feet-to-ground contact, driven by the kinematics of the input motion and the nature of the terrain.
• A versatile model based on Hooke’s law for ground deformation, parameterized by the Young modulus in compression and the Poisson ratio in lateral material displacement.
We use a real-time implementation in the Unity system to test and validate our method. Our results show that our method gives visually plausible results for a variety of ground types and character gaits and that the interaction forces we compute compare well with real, acquired data for Ground Reaction Forces (GRF).
2 Related Work
Our work is related to both real-time animation models for characters, enabling them to adapt to a dynamic environment and the simulation of soft grounds.
2.1 Real-Time Characters Interacting With Their Environment
Modeling plausible character motion is a complex problem that couples behavioral intents with physics-based equilibrium constraints. Fully kinematic models were explored in early work (Sun and Metaxas, 2001), leading to real-time adaptation of walking cycles to uneven terrains, at the price of lacking dynamic response to terrain changes. Coupling preset gaits with dynamic events were handled through the help of animation controllers (Yin et al., 2007) that convert differences between the actual pose and the prescribed one as torques, which are then fed into a physically based simulation computing dynamic state changes. Sources of uncertainty can also be included in the control strategy to adapt the motion to unknown situations (Wang et al., 2010). Coupled with reinforcement learning (Peng et al., 2018) and/or adapted reward functions (Kwon et al., 2020), these approaches can model a wide range of plausible complex motions up to acrobatic effects (Won et al., 2020). These motions automatically adapt to their simulated environment at the price of their high computational cost and indirect control and thus cannot be directly applied to loose deforming terrains in standard game engines. In reverse, gathering and processing large pre-recorded motion databases allow for the use of deep-learning methods (Holden et al., 2017), which, once learned, can achieve real-time performance. Still, the need for an extensive motion database would not scale well to the variety of loose environments targeted in this work.
Closer to our goals, simple dynamic models applying forces to the center of mass to control the general balance of a character seen as an inverted pendulum (Kwon and Hodgins, 2010) allow for a good high-level tradeoff between efficiency and plausibility. Mitake et al. (2009) proposed a high-level representation of an oscillating proxy volume, triggering pre-recorded detailed animations (walking, running, falling). This work achieves real-time animation but is restricted to preset animations on flat grounds. Other works modeled the adaptation of a character’s gait to more complex environments. Carensac et al. (2015) studied the locomotion of characters partly immersed in a liquid. Bermudez et al. (2018) used drag forces to adapt the character’s gait to a fluid environment. Similar to ours, these approaches rely on high-level controllers, but they only take into account the influence of the environment on the character’s gait rather than modeling two-way interactions. Moreover, they are restricted to locomotion in a fluid.
2.2 Soft Grounds
Terrain deformation is a well-studied area in geoscience and computer graphics (CG) (Galin et al., 2019). At a large scale, terrains are subject to diverse natural phenomena, from the erosion due to sun and water that break and transport ground material (Cordonnier et al., 2017) to the action of wind that piles up sand dunes (Beneš and Toney Roa, 2004) and snow deposit, which creates smooth landscapes (Cordonnier et al., 2018). The effect of moving characters was little studied at such scale, with the exception of skiers leaving tracks and causing avalanches in snow-covered landscapes (Cordonnier et al., 2018) and of the generation of eroded trails due to fauna (Ecormier-Nocca et al., 2021). In both cases, simple textures were used as track models, and none of these works studied the two-way interaction between a deforming ground and a moving creature.
At smaller scales, extensive CG work studied physically based simulation of snow (Stomakhin et al., 2013) and granular material such as dry (Zhu and Bridson, 2005; Ihmsen et al., 2013; Daviet and Bertails-Descoubes, 2016) or wet sand (Lenaerts and Dutré, 2009). Some of these models specifically addressed the two-way coupling of sand simulation with rigid or elastic solids (Narain et al., 2010; Klár et al., 2016). While being able to capture small-scale phenomena, these models are only applicable to a specific type of ground. Moreover, being computationally intensive, they are not applicable to our problem of real time, two-way interactions between characters and soft grounds.
More versatile, approximate models were proposed for real-time applications. Sumner et al. (1999) introduced the first unified model for sand, mud, and snow. They generated foot tracks left by walking characters using a flexible procedural method to move soil material (represented by a hightfield in a 2D terrain grid) away from the intersection area between a foot model and the ground. Onoue and Nishita (2005) introduced a more focused appearance-based approach for granular materials, able to move and accumulate sand on top of colliding bodies. Zeng et al. (2007) further improved this method using Newtonian physics to calculate the deformation. Similar to our work, these two methods cast rays for collision detection between ground and moving bodies and use the impulse experienced by the ground to compute its deformation. However, they did not take the velocity and mass of the colliding bodies into account, thus neglecting the resulting momentum. A more generic, approximate terrain model, composed of a plastic layer on top of an elastic layer, was introduced for simulating ground-vehicle interaction in real time (Zhu et al., 2011). The computation of the interaction force was inspired by Bekker’s terramechanics theory (Bekker, 1962), enabling different approximations for snow, grass, sand, and mud. Although our ground model also involves Hooke’s low, we make use of a single viscoplastic ground layer, which can be parameterized for different terrain responses. Lastly, Zhu et al. (2019) used a GPU simulation over a 2D grid to achieve sand-vehicle interaction at interactive rates. While their solution is more accurate than ours, it only captures granular materials and provides lower frame rates than our simpler CPU implementation in Unity.
To our best knowledge, the only method that addressed two-way interaction between virtual characters and soft grounds in real time is our recent work (Paliard et al., 2021). An input, kinematic character animation was enhanced with adaptive tilting and dynamic balancing mechanisms thanks to a simple, global controller, leading to automatic gait changes on non-flat terrains. The character poses were driven by inverse kinematics (IK), and ray casting was used to detect collisions between the feet and the ground, enabling the generated footprints to impact the subsequent character’s motion. Unfortunately, fully-geometric deformations based on the intersection between the feet geometry and the terrain were used to compute footprints. This method, therefore, failed to account for the dynamics of the interaction, such as the character’s quantity of motion, a combination of applied weight and velocity. As a result, a heavy jumping character and a light walking one with similar feet sizes generated the same tracks. While it reuses the same motion controller, our new model includes a physical force model and stress-strain relationships for the soft ground, which, in combination, enables overcoming these strong limitations.
3 An Adaptive Model for Character Locomotion
3.1 Input Locomotion Model
Our method takes as input an animated character model from a standard game engine, such as a mesh geometry, a rigged skeleton with preset animations, and an IK system applied to feet bones, on top of a simple proxy-geometry and rigid body used for balance control and collision processing. While it allows characters to walk on both flat and sloppy terrains, such models do not allow them to dynamically adapt their gait to varying ground slopes, leading to robotic-looking motions that lack dynamics. Furthermore, they do not provide mechanisms to model any two-way interaction with the environment, restricting the animation to rigid grounds only. Therefore, similar to Mitake et al. (2009), we add to this model a global dynamic behavior, computed by simulating a single rigid body model associated with a bounding capsule. The centroid of the capsule is located at the root joint of the articulated character (the hips), which is assumed to be close to the character’s center of mass, and its inertia tensor is precomputed from the character’s geometry in rest pose. This simplified physically based model is used for coarse collision detection, enabling the mass, the position of the center of mass, and dimensions of the capsule to have a direct impact on the character’s motion. The time evolution of the position and orientation of the physically based capsule is computed from a forward dynamic simulation. It takes as input the velocity of the kinematic animation and a torque. This simulated capsule is then used to define the new orientation and position of the root joint of the character. The limbs corresponding to the feet are finally adjusted in a second step. They are placed using the joint-angles described in the direct kinematics input motion and then adjusted using inverse-kinematics to enforce contact with the ground. The aforementioned elements can be seen as a layered model for character motion control, where each layer acts at a different level of detail. They span from global control for the rigid body that controls the position and orientation of the coarse geometric collider to local control for the IK, whose positions, computed using dynamic ray casting, allow for accurate feet positioning on the ground. To make this model adaptive to non-flat terrains, we enhance the coarser, rigid body model with tilt and swing control terms, as presented next.
3.2 A High-Level Controller for Tilting and Swinging Motion
Our global controller computes a torque applied to the rigid body representation of the character over time, modeling the need of the character to self-stabilize on steep terrains. An additional dynamic swinging behavior conveys the effort developed by the character to remain stable and move forward. In contrast to usual controllers, expressed as a difference between current and objective angles for specific limbs, our high-level controller builds on the notion of center of mass, more relevant in our case, by trying to keep its projection along the gravity direction onto the character’s support polygon. Because we aim at modeling this tilting motion in the velocity direction, we simplify the representation to a 2D-planar problem, where the plane is defined by the gravity direction, the current character velocity, and is passing through its center of mass. The support polygon is dynamically computed as the segment defined by the projection of the feet positions onto the ground in this plane. The objective projection of the center of mass
where pcom and

FIGURE 1. Adaptive character locomotion on non-flat terrains. Left: the torque magnitude depends on the distance between the middle of the support polygon
4 Force Model for Feet-to-Ground Contact
In this section, we propose a model for the forces that the character applies to the ground when its feet are in contact with it, based on its kinematics and the nature of the ground. The resulting interaction forces over time are used to compute a plausible ground deformation as described in the second part of Section 5. The overview of our global physics-inspired terrain deformation process is displayed in Figure 2.
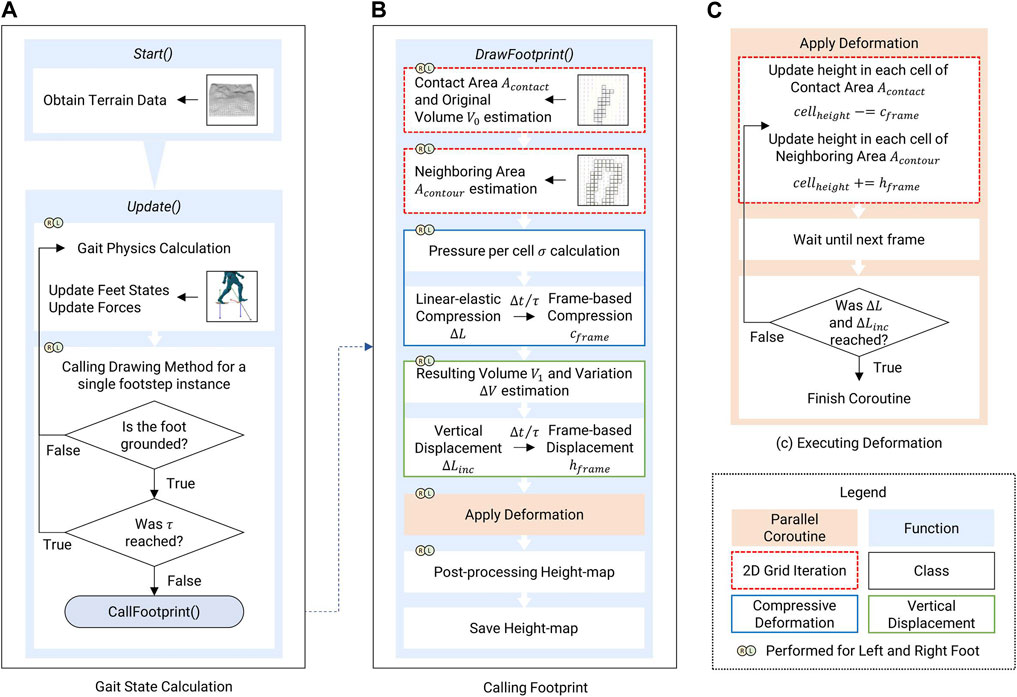
FIGURE 2. Framework for terrain deformation. Block (A) is in charge of calculating the forces taking place at each frame and then initializes block (B), where footprints are computed. The coroutine (C) computes the associated deformation and terminates when the terrain displacement is completed.
4.1 Static Forces Mode and Weight Ratio
When a foot of the character is in contact with the terrain, it exerts a force on it that we denote
While we will consider later the geometrical contact surface between the foot and the terrain to compute the deformation of the ground, we assume at this stage that the contact forces are applied at the foot’s joint position, supposed to be a fixed point relative to the character.
When the character is static,
If only a single foot is in contact with the ground, then the full weight of the character is applied through it, while the other foot has a null contribution with respect to the ground. When the two feet are in contact, the weight force is distributed through the two contact points, and we introduce the weight ratios αleft and αright such that
Assuming that the mass of the character is evenly distributed in the 2D plane defined by the contact points of the feet pleft, pright and its center of mass, the weight ratio represents the relative position of pcom—the projection of the center of mass on the segment [pleft, pright]—leading to
This weight ratio can be intuitively seen as a way to split the contribution of the character weight between a left and right side that adapts to its posture (Garcia, 2012) and is therefore a value that is re-computed at each frame of the animation.
4.2 Dynamic Force Model During the Contact
When the character is in walking motion, its global change of momentum is expressed by forces exerted on the ground and applied at the position of the feet. Let us call
Our idea is to estimate plausible value for
When the character’s foot touches the ground at a time t0, the IK-based system considers its position to be fixed, and its motion stops therefore suddenly. This change of velocity can be represented by an impulse
where
applied from the colliding foot to the ground during the time interval t ∈ [t0, t0 + τ], where t is the current frame time. Note that this formulation allows scaling the magnitude of
5 Real-Time Terrain Deformation
Let us now describe the second part of our two-way interaction model, namely terrain deformation, which in turn will modify the character’s gait.
5.1 Plastic Model for Terrain Compression
Our first objective is to convert the time-varying force Ffoot into a dynamic compression behavior that will take place under the character’s foot. Our model is based on the following two assumptions. First, we suppose that only the upper layer of the ground is loose enough to be deformed by the action of the foot. This loose upper layer of depth L0, typically a few centimeters, depends on the material, and we suppose that the deeper part below is fully rigid. Second, we assume that this loose layer exhibits a viscoplastic deformation following Hooke’s law under compression. Once the foot stress is released, we assume a pure plastic behavior, and the footprint remains fully carved in the terrain. As illustrated in Figure 3-left, each grid cell of the terrain is seen as a compressive rod, with relative deformation characterized by its Cauchy strain ϵ = ΔL/L0, which is linearly related to the stress σ exerted by the foot through its Young modulus of elasticity E and σ = E ϵ. The plastic behavior of the material is enforced in keeping track of a total accumulated compression cacc ∈ [0, L0] for each cell of the terrain grid and constraining it to only increase from one frame to the other.
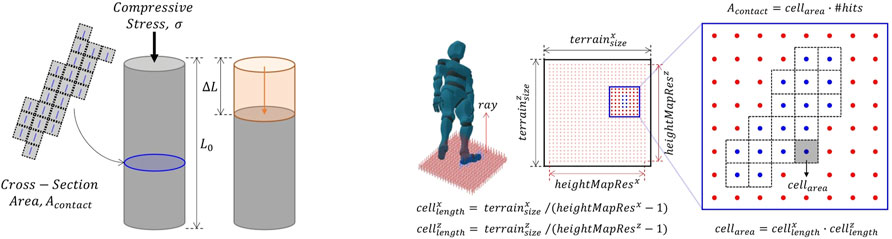
FIGURE 3. Left: compressive model of the terrain using Hooke’s law. Each cell in contact with the foot is represented by a compressible cylinder of initial length L0 and Young’s modulus E. Right: 2D grid generation and contact area for each foot.
To compute the stress σ applied to the ground, we consider the orthogonal component of the force Ffoot⊥ with respect to the ground normal
The contact area Acontact must be efficiently computed as it varies dynamically with the motion of the character and the deformation of the terrain. We first set a local window on the terrain grid set as a bounding square around the initial foot position at the contact time (Figure 3-right). Then, at each frame, we use ray casting on each cell of the bounding square to estimate the total area where the foot collides with the terrain. Considering that each terrain cell has a unit area cellarea and the ray cast detects #hits cells where the foot collides with the terrain, we have Acontact = #hits ⋅ cellarea.
Based on our compressible rod model, we can therefore compute a target deformation magnitude:
While this target deformation is dynamically updated at each frame, we cannot apply it instantaneously to the terrain as it does not take into account its viscoplastic behavior. The latter indeed limits its deformation rate along the characteristic time τ. Instead, we apply on each cell the limited per-frame compression cframe given by
with cacc adding the new value of cframe at each new frame.
5.2 Terrain Vertical Accumulation Using Poisson’s Ratio
While some terrain types such as snow can be highly compressible, others such as dry sand are not. In this case, the volume carved under the foot needs to be moved transversely and accumulated to form a bump around the foot position. We model this behavior by assuming that a given terrain can be homogeneously characterized by Poisson’s ratio ν with small deformation such that
with V0 = Acontact L0 being the volume before deformation and V1 the final volume corresponding to this material after deformation. Let us call
Let us call Acontour the area defined as the exterior neighborhood of Acontact. The diameter of Acontour is denoted by rcontour, which represents how far the accumulated material may spread around the feet on a given type of ground. Acontour is represented on the discrete terrain grid as a finite number of #neighbors cells. Assuming a uniform distribution of material over Acontour, each cell of this area should follow a target height increase of
Similar to the compression, this target increase of material is also temporally spread along the characteristic time τ and we therefore apply at each frame an actual height increase hframe of
with hacc begin the accumulated height on the cell of Acontour.
To preserve a smooth appearance of the bumps, we display a filtered version of the accumulated heightfield using standard Gaussian blur. In order to avoid accumulating volume errors, we keep in memory and use the uniform accumulated height for computations, while the smoothed version is only used for display.
6 Results and Application
We implemented our method as an interactive prototype in Unity (Figure 4), where the character can be controlled using the keyboard or a game pad. In the last case, the character’s motion will interpolate between walking, running, and jumping animation, based on the intensity with which we move the joystick. The character is placed on different preset terrain types, such as snow, dry sand, and mud. Each of these sample grounds has a size of 10, ×, 10 m with a maximum vertical difference of 10 m between the lowest and highest point. The height maps are initially sampled using a grid of 2562 points. We use a bounding square of size 40 × 40 cm to subdivide the terrain grid around each foot impact center. To estimate the neighboring area where the vertical deformation around the impact is applied, we define rcontour = 4 cm. The loose upper layer length in the linear-elastic model is described by L0 = 30 cm. The default character has a total mass of 77.5 kg and a height of 1.8 m. The feet are defined by abstract box colliders of a surface area of 10 cm2. The locomotion controller was set with values α = 30N and β = 6Nm. Our deformation implementation in Unity makes use of coroutines which allow computing the terrain modification using a non-blocking multitask process. The process associated with the deformation (the orange blocks in Figure 2) runs parallel with the character IK and our model of controller and is automatically synchronized for coherent display. The entire method—character locomotion and terrain deformation—is fully coded in high-level C# scripts but still runs in real time at about 65 fps on a standard laptop (CPU: Intel Core i7, eight cores, 3.10 GHz) for a resolution of 4 cm (grid of 2562 shown in our illustrations) and 30 fps for a resolution of 2 cm per cell.
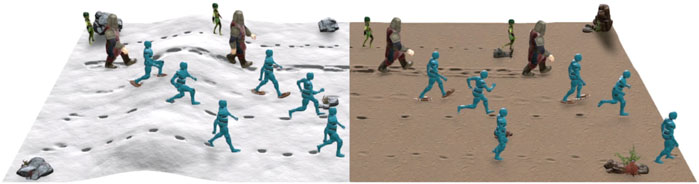
FIGURE 4. Kinematics-driven characters walking and running on different soft terrains (snow and sand). Our method generates dynamic footprints that take physical parameters (weight, velocity, contact surface) into account, as well as the nature of the terrain. This deformation is coupled with an adaptive locomotion model leading to coherent, real-time coupling between character gait and dynamic terrain deformation.
6.1 Validation of Ground Reaction Forces
We first show that our model of force robustly adapts to various situations, including walking motion and running, or equilibrium situation where the character stands alternatively with one or two feet in contact with the ground. Figure 5 displays the vectors corresponding to
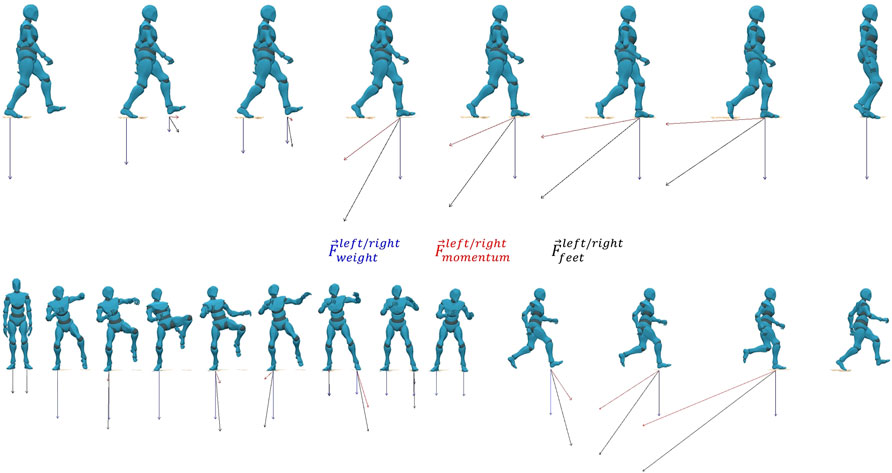
FIGURE 5. Display of the force vectors
We then display and compare the values of our estimated Ground Reaction Forces on a standard walking motion with respect to real measurements from the literature (Ren et al., 2008). For this experiment, we considered a relatively hard terrain defined by a small characteristic time τ = 0.05s and Young’s modulus of 2 MPa for small terrain deformation. We set the subject to have similar weight and height with respect to the average real subjects and set the walking speed to 1.65 m/s. The corresponding graph of the forces is reported in Figure 6. The first row shows how each foot supports the proportional part of the weight depending on the gait phase. When the right foot starts to hit the terrain 1), it prompts the ground to respond with an additional force due to the variation in momentum, as shown in the second row. This affects, in return, the Ground Reaction Forces by inducing a peak in that exact moment, as illustrated in the plot of the third row, and continues during the short time when both feet are grounded 2). The force exerted due to the impact mitigates when the character begins to place most of its weight on the right foot 3), being the instant at which the GRFs stabilizes with the force caused by the character’s weight. The switch between the forces is complete when the right foot supports the entire weight of our model 4).
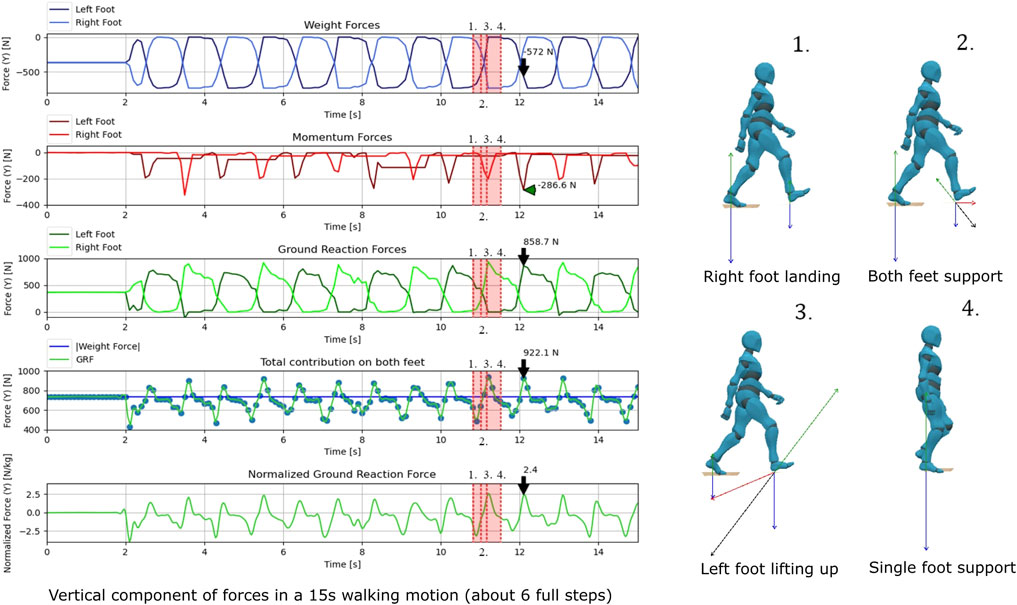
FIGURE 6. Graph of forces during a walking animation. The green marker in the plot of the second row represents the moment at which the force due to the change in momentum reaches its maximum value. This same time is shown by the black arrow in the other plots and shows the associated GRF maximal value. The four main events happening before and during the foot contact in the walking cycle are indicated by numbers 1–4 and illustrated on the right side.
These graphs show the very similar shape and range of magnitude with the real measurements obtained using force plates and optical capture system reported by Ren et al. (2008) and Shahabpoor and Pavic (2017). In particular, the main steps of the walking cycle (1, 2, 3, 4) are depicted on the graph of forces, and the total vertical component of Ground Reaction Force normalized by the character weight varies has a maximum pic intensity in the range of 2.5–3.
6.2 Test Case of Terrain Deformation
We present in Figure 7 a test scenario of our terrain deformation for the simple case of a sphere of mass m falling from a distance d = 2.5 m. When not explicitly modified, the default parameters are m = 50kg, E = 1MPa, and τ = 0.2s. Figure 7B shows the increase in the terrain hole for a purely compressive material with varying mass and Young’s modulus. Figure 7C shows the full model of a semi-compressible material, with the effect of increasing the Poisson ratio (constant hole depth, but increased amount of accumulated material) and decreasing the Young modulus (deeper deformation leading to a larger amount of moved material).
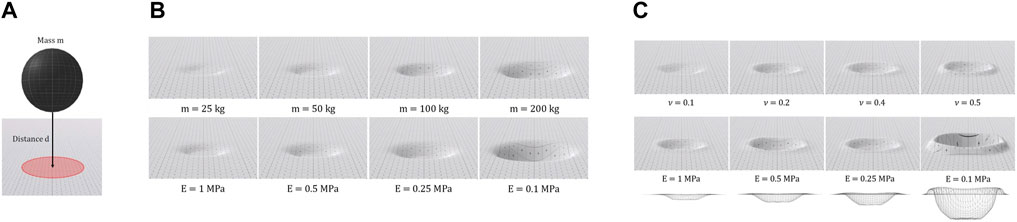
FIGURE 7. (A) Test scenario of our terrain deformation model for a sphere falling from a fixed distance on soft ground. (B) Pure compressive material deformation for different weight sphere mass m and Young’s modulus E. (C) Lateral accumulation for semi-incompressible material for various Poisson’s ratio ν and Young’s modulus E.
6.3 Application to Various Ground Materials
We are able to model different types of ground material, as illustrated in Figure 8. The latter were set coherent with real photographs of footprints, using the parameters reported in Table 1. Young’s modulus values were given the same order of magnitude as the ones reported by Gerling et al. (2017), while the characteristic time, Poisson’s ratio, and Gaussian filter were set based on phenomenological tests.
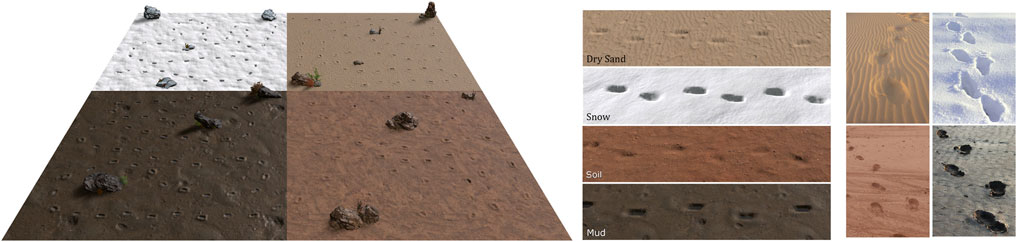
FIGURE 8. Terrain scenarios in our experiments representing a virtual model of dry sand, snow, soil, and mud. The right-most images are real photographs of footprints on such materials.

TABLE 1. Parameters used to represent the different type of terrains.
Thanks to the automatic adaptation of the character locomotion controller to the feet position on the terrain, our system handles two-way, dynamic interaction between the character gait and the terrain deformation. Such an effect on the character motion is illustrated in Figure 9, comparing the default walking behavior on a flat terrain (red character) to the one considering the change of terrain (blue character).

FIGURE 9. Dynamic adaptation of the character’s walking gait to the change of the terrain. Red: default character walking on flat ground. Blue: our result, with a character, locally adapting its posture to the evolving terrain.
Figure 4 illustrates a typical locomotion scenario with a variety of behaviors, terrain geometry on snow, and sand model. The closest character follows a standard walking motion, and we can note the change of footprint depth when moving from snow to sand. The second character is running. Due to its velocity, the footprints remain deep on both types of ground. Note that our locomotion system automatically adapts its legs’ position on the small hill. The third character wears snowshoes that increase the surface of its feet, thus leading to shallow footprints. The increased size of the feet leads to the adaptation of the gait when a collision with the terrain is detected. The fourth character is heavy, which leads to deep footprints. The character also has large feet volume and small legs compared to its size, which coupled to the deep prints, leading to an almost constant collision between the feet and the ground, which turns out to generate trails. The last walking character has a smaller weight and a tiny foot surface, which leads salient, individual footprints. We further encourage reviewers to watch the full quality video accompanying this submission at the following URL1.
Finally, thanks to its simplicity, our method is able to robustly extend to various types of kinematics input beyond standard walks and can generate plausible footprints along the feet trajectory, as illustrated in Figure 10.
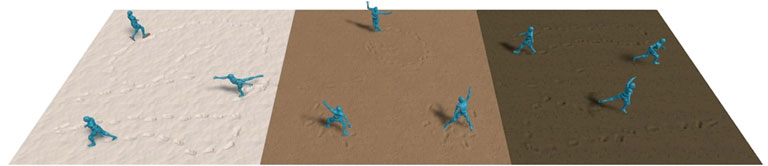
FIGURE 10. Various kinematics motion inputs lead to plausible terrain footprints.
7 Discussions and Conclusion
We have proposed a method able to convert, in real time, a simple kinematic locomotion model into a dynamic animation with two-way interactions between the character and soft grounds. Our physically based interaction forces drive the generation of local footprints, controlled using standard values parameters for the ground material such as its Young’s modulus and Poisson’s ratio. Given a user-defined terrain type, our method is able to compute coherent forces during foot contact, despite considering a raw kinematics input for the character model. The geometric deformation of the terrain is itself impacting the walking gait, thus leading to a bilateral interaction between the soft terrain and the motion of the character. The main advantage of this approach is to be lightweight enough to run interactively in a game engine like Unity. Beyond interactive video-game applications, such a system could be useful in virtual reality applications, with a VR setup where the user could see in real time its own footprints. Our force model could also be coupled with other physically based systems to allow interaction with other objects in the scene.
We made a series of approximations in our force model to achieve efficient computations, leading to several limitations. In order to estimate the interaction forces between the character and the ground from kinematic inputs, we only considered the change of velocity of the foot and assumed that the character behaves like a rigid body falling down, thus neglecting any internal muscle influence that the character might use for dynamically adapting its motion during the collision of its feet with the terrain. While this assumption led to reasonable results for walking characters, it could not capture the change of pressure exerted on the ground during foot kick, or dancing-like motion, for instance, where body parts in the air have rapid variations of momentum. To accurately handle such cases, the change of momentum of each body part could be taken into account in a global system to retrieve all the forces and torque at all joints. Furthermore, the use of a fully controlled-based model together with an optimization strategy for each joint could bring an advantage, not only to reproduce more suitable deformations but also to better recreate the impact of the terrain on the character’s movement. This might be helpful in different situations, such as decreasing the character’s speed on terrains where his feet sink to reduce effort and maintain a constant energy consumption or extending the arms and bending the knees for balance and stability.
In addition, our physical model for grounds, which makes use of a global property for the deformable material, is also an approximation of how granular material behaves. In particular, assuming a constant deformation time τ per material is only valid within a certain range of mass and velocity of the character. Making τ dependent on velocity in the case of a jumping character, for instance, would allow modeling a fast ground deformation immediately after the impact and slowing down as the velocity is absorbed. The vertical accumulation also only approximates the final volume of displaced material as being spatially filtered by a Gaussian. As an extension, we would like to integrate the direction and magnitude of the velocity to impact the resulting bump and integrate a local terrain tessellation so that our method could be applied to arbitrary terrain dimensions.
Finally, we would like to adapt the system to synthesize the impact of not only bipedal characters but also quadrupeds. To this end, we need to adjust the system so that the total mass of the character is correctly distributed based on a variable number of contact points with the ground. Having such low-level deformations on the terrain could help us better recreate the long-term impact of virtual animals on natural environments, as an extension of Ecormier-Nocca et al. (2021).
Data Availability Statement
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number(s) can be found in the following link: https://github.com/edualvarado/unity-footprints.
Author Contributions
EA, DR, and M-PC contributed to the conception and design of the research project. EA is the main contributor and developed most of the technical part of the project, conducted the experiments shown in the results section, and programmed the code available in the Supplementary Material. CP was the main contributor of the associated short paper “Soft Walks: Real-Time, Two-Ways Interactions between a Character and Loose Grounds, EG2021” at the starting point of this research, and developed the high-level controller described in Sec. A High-Level Controller for Tilting and Swinging Motion. All authors contributed to the manuscript redaction and revisions.
Funding
This work received funding from the European Union’s Horizon 2020 Research and Innovation Programme under the Marie Skłodowska-Curie Grant Agreement n. 860768 (CLIPE project).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary Material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frvir.2022.801856/full#supplementary-material
Footnotes
1https://drive.google.com/drive/folders/1Bke_NmZLUEU0fKLgWMHt7j5128Myqvz_?usp=sharing.
References
Bekker, M. G. (1962). Theory of Land Locomotion: The Mechanics of Vehicle Mobility. Ann Arbor: University of Michigan Press.
Beneš, B., and Toney Roa, I. (2004). “Simulating Desert Scenery,” in WSCG International Conference on Computer Graphics, Visualization and Computer Vision (Plzen-Bory: Czech Republic).
Bermudez, L., Tessendorf, J., Zimmermann, D., and Zordan, V. (2018). “Real-time Locomotion with Character-Fluid Interactions,” in ACM SIGGRAPH Conference on Motion, Interaction and Games, MIG’18, Limassol, Cyprus, 8–10 November 2018. doi:10.1145/3274247.3274515
Carensac, S., Pronost, N., and Bouakaz, S. (2015). “Real-time Gait Control for Partially Immersed Bipeds,” in ACM SIGGRAPH Conference on Motion, Interaction and Games, MIG’15, Lisbon, Portugal, 7–8 May 2016.
Cordonnier, G., Galin, E., Gain, J., Bedrich Benes, E. G., Peytavie, A., and Cani, M.-P. (2017). Authoring Landscapes by Combining Ecosystem and Terrain Erosion Simulation. ACM Trans. Graph. 36, 1–12. doi:10.1145/3072959.3073667
Cordonnier, G., Ecormier, P., Galin, E., Gain, J., Benes, B., and Cani, M.-P. (2018). Interactive Generation of Time-Evolving, Snow-Covered Landscapes with Avalanches. Comput. Graphics Forum 37, 497–509. doi:10.1111/cgf.13379
Daviet, G., and Bertails-Descoubes, F. (2016). A Semi-implicit Material point Method for the Continuum Simulation of Granular Materials. ACM Trans. Graph. 35, 1–13. doi:10.1145/2897824.2925877
Ecormier-Nocca, P., Cordonnier, G., Carrez, P., Moigne, A.-M., Memari, P., Benes, B., et al. (2021). Authoring Consistent Landscapes with flora and Fauna. ACM Trans. Graph. 40, 1–13. doi:10.1145/3476576.3476668
Galin, E., Guérin, E., Peytavie, A., Cordonnier, G., Cani, M.-P., Benes, B., et al. (2019). A Review of Digital Terrain Modeling. Comput. Graphics Forum 38, 553–577. doi:10.1111/cgf.13657
Garcia, A. L. (2012). “Principles of Animation Physics,” in ACM SIGGRAPH 2012 Courses, SIGGRAPH’12, Los Angeles, CA, USA, 5–9 August 2012. doi:10.1145/2343483.2343496
Gerling, B., Löwe, H., and Van Herwijnen, A. (2017). Measuring the Elastic Modulus of Snow. Geophys. Res. Lett. 44, 11,088–11,096. doi:10.1002/2017gl075110
Holden, D., Komura, T., and Saito, J. (2017). Phase-functioned Neural Networks for Character Control. ACM Trans. Graph. 36, 1–13. doi:10.1145/3072959.3073663
Ihmsen, M., Wahl, A., and Teschner, M. (2013). A Lagrangian Framework for Simulating Granular Material with High Detail. Comput. Graphics Forum 37, 800–808. doi:10.1016/j.cag.2013.04.010
Klár, G., Gast, T., Pradhana, A., Fu, C., Schroeder, C., and Jiang, C. (2016). Drucker-prager Elastoplasticity for Sand Animation. ACM Trans. Graph. 35, 1–12. doi:10.1145/2897824.2925906
Kwon, T., and Hodgins, J. (2010). “Control Systems for Human Running Using an Inverted Pendulum Model and a Reference Motion Capture Sequence,” in In Proc. Symposium on Computer Animation, ACM SIGGRAPH/Eurographics, Madrid, Spain, 2–4 July 2010.
Kwon, T., Lee, Y., and Panne, M. V. D. (2020). Fast and Flexible Multilegged Locomotion Using Learned Centroidal Dynamics. ACM Trans. Graph. 39, 46-1. doi:10.1145/3386569.3392432
Lenaerts, T., and Dutré, P. (2009). Mixing Fluids and Granular Materials. Comput. Graphics Forum 28, 213–218. doi:10.1111/j.1467-8659.2009.01360.x
Mitake, H., Asano, K., Aoki, T., Salvati, M., Sato, M., and Hasegawa, S. (2009). Physics-driven Multi Dimensional Keyframe Animation for Artist-Directable Interactive Character. Comput. Graph. Forum 28 (2), 279–287. doi:10.1111/j.1467-8659.2009.01367.x
Narain, R., Golas, A., and Lin, M. (2010). Free-flowing Granular Materials with Two-Way Solid Coupling. ACM Trans. Graph. 29, 1–10. doi:10.1145/1882261.1866195
Onoue, K., and Nishita, T. (2005). An Interactive Deformation System for Granular Material. Comput. Graphics Forum 24, 51–60. doi:10.1111/j.1467-8659.2005.00828.x
Paliard, C., Alvarado, E., Rohmer, D., and Cani, M.-p. (2021). “Soft Walks : Real-Time, Two-Ways Interaction between a Character and Loose Grounds,” in Eurographics 2021 - Short Paper, Vienna, Austria, 3–7 May 2021. doi:10.2312/egs.20211019
Peng, X. B., Abbeel, P., Levine, S., and van de Panne, M. (2018). Deepmimic: Example-Guided Deep Reinforcement Learning of Physics-Based Character Skills. ACM Trans. Graph. 37, 143. doi:10.1145/3197517.3201311
Ren, L., Jones, R. K., and Howard, D. (2008). Whole Body Inverse Dynamics over a Complete Gait Cycle Based Only on Measured Kinematics. J. Biomech. 41, 2750–2759. doi:10.1016/J.JBIOMECH.2008.06.001
Shahabpoor, E., and Pavic, A. (2017). Measurement of Walking Ground Reactions in Real-Life Environments: A Systematic Review of Techniques and Technologies. Sensors (Basel) 17, 2085. doi:10.3390/s17092085
Stomakhin, A., Schroeder, C., Chai, L., Teran, J., and Selle, A. (2013). A Material point Method for Snow Simulation. ACM Trans. Graph. 32 (4), 102:1–102:10. doi:10.1145/2461912.2461948
Sumner, R. W., O’brien, J. F., and Hodgins, J. K. (1999). Animating Sand, Mud, and Snow, Tech. rep. Comput. Graphics Forum 18 (1), 17–26. doi:10.1111/1467-8659.00299
Sun, H. C., and Metaxas, D. N. (2001). “Automating Gait Generation,” in ACM SIGGRAPH, Los Angeles, CA, USA, 12–17 August 2001. doi:10.1145/383259.383288
Wang, J. M., Fleet, D. J., and Hertzmann, A. (2010). “Optimizing Walking Controllers for Uncertain Inputs and Environments,” in ACM SIGGRAPH 2010 Papers, SIGGRAPH’10, Los Angeles, CA, USA, 25–29 July 2010. doi:10.1145/1833349.1778810
Won, J., Gopinath, D., and Hodgins, J. (2020). A Scalable Approach to Control Diverse Behaviors for Physically Simulated Characters. ACM Trans. Graph. 39 (4), 33-1. doi:10.1145/3386569.3392381
Yin, K., Loken, K., and van de Panne, M. (2007). SIMBICON: Simple Biped Locomotion Control. ACM Trans. Graph. 26 (3). doi:10.1145/1276377.1276509
Zeng, Y.-L., Tan, C. I., Tai, W.-K., Yang, M.-T., Chiang, C.-C., and Chang, C.-C. (2007). A Momentum-Based Deformation System for Granular Material. Comp. Anim. Virtual Worlds 18, 289–300. doi:10.1002/cav.209
Zhu, Y., and Bridson, R. (2005). Animating Sand as a Fluid. ACM Trans. Graph. 24 (3), 965–972. doi:10.1145/1073204.1073298
Zhu, Y., Chen, X., and Owen, G. S. (2011). “Terramechanics Based Terrain Deformation for Real-Time Off-Road Vehicle Simulation,” in International symposium on visual computing, Las Vegas, NV, USA, September 26–28, 2011, 431–440. 6938 LNCS. doi:10.1007/978-3-642-24028-7_40
Keywords: character animation, kinematics, natural phenomenon, terrain deformation, real time
Citation: Alvarado E, Paliard C, Rohmer D and Cani M-P (2022) Real-Time Locomotion on Soft Grounds With Dynamic Footprints. Front. Virtual Real. 3:801856. doi: 10.3389/frvir.2022.801856
Received: 25 October 2021; Accepted: 28 February 2022;
Published: 28 March 2022.
Edited by:
Steve Tonneau, University of Edinburgh, United KingdomReviewed by:
Taku Komura, University of Edinburgh, United KingdomJason Chemin, Laboratoire d’analyse et d’architecture Des Systèmes (LAAS), France
Daeun Song, Ewha Womans University, South Korea
Copyright © 2022 Alvarado, Paliard , Rohmer and Cani . This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Eduardo Alvarado, ZWR1YXJkby5hbHZhcmFkby1waW5lcm9AcG9seXRlY2huaXF1ZS5lZHU=