 Elin A. Björling
Elin A. Björling Ada Kim2
Ada Kim2 Katelynn Oleson
Katelynn Oleson Patrícia Alves-Oliveira
Patrícia Alves-Oliveira
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Virtual Real. , 13 January 2022
Sec. Virtual Reality and Human Behaviour
Volume 2 - 2021 | https://doi.org/10.3389/frvir.2021.746521
This article is part of the Research Topic Asymmetric Mixed Reality: Exploring Interaction and Collaboration with Heterogeneous Mixed Reality Technology View all 6 articles
Virtual reality (VR) offers potential as a collaborative tool for both technology design and human-robot interaction. We utilized a participatory, human-centered design (HCD) methodology to develop a collaborative, asymmetric VR game to explore teens’ perceptions of, and interactions with, social robots. Our paper illustrates three stages of our design process; ideation, prototyping, and usability testing with users. Through these stages we identified important design requirements for our mid-fidelity environment. We then describe findings from our pilot test of the mid-fidelity VR game with teens. Due to the unique asymmetric virtual reality design, we observed successful collaborations, and interesting collaboration styles across teens. This study highlights the potential for asymmetric VR as a collaborative design tool as well as an appropriate medium for successful teen-to-teen collaboration.
Previous research has shown the many benefits of engaging teens in design processes (Bowen et al., 2013; Sustar et al., 2013) even for games (Bonsignore et al., 2014; Hrpka, 2016). This exploratory design study highlights the potential of a novel technology, virtual reality (VR), as a tool for engaging teens in collaboratively designing and interacting with a preferred social robot.
VR is an emerging new technology platform that enables a strong sense of presence and immersion (Blascovich and Bailenson, 2005; Sanchez-Vives and Slater, 2005), yet is free from physical and financial limitations that often constrain robot design. Compared to a typical design process in robotics, VR can support a wide range of rapid prototyping with almost unlimited design possiblities (Safaric et al., 2003). A VR environment can provide an efficient and cost-effective solution in which users can freely visualize, build, and interact with a prototype of their preferred robot. Moreover, VR allows for a large depth of playful interaction possibilities, given the immersive, game-like environment which can promote social interaction and collaboration (Parsons, 2015). Thus, a VR environment provides great potential as a platform for supporting teens in robot design and exploration of teen-robot interactions.
Using a participatory, human-centered design (HCD) approach, we leveraged the potential of the VR platform to explore robot design and interaction with teens. The design goal of our study was to engage teens in the design process to create a VR game in which they build a social robot. Therefore, we collaborated with teens in their local area high school environments as co-designers to design and develop the game.
We conducted three design stages: 1) Ideation (sketching and brainstorming), 2) Prototyping and testing a robot card game to explore design requirements, and 3) Usability testing a low-fidelity VR game. All of the design stages informed iterations on the VR environment that were then integrated into an asynchronous, mid-fidelity VR game. We then conducted a pilot study of VR game play to explore engagement, robot design, and teen-teen interactions.
In the following sections, we describe the background for our interest in designing a VR game for teens, details of each design stage of our participatory HCD process, and a pilot usability testing of our asymmetrical VR game. We then discuss the findings from our pilot usability study and situate those findings within existing literature about teens.
In designing a collaborative VR game for teens, what should be considered first is the socioemotional developmental stage during the adolescent period. Due to biological changes in adolescent brain structure, teens perceive stronger emotions and mood changes compared to adults (Blakemore, 2012; Little et al., 2016). Teens also develop a heightened interest in socialization. Typical teens tend to spend a large amount of time building peer relationships, and show increased sensitivity to social rejection and exclusion (Little et al., 2016). Such strong socioemotional needs of teens heavily shape their preferences, which is differentiated from those of adults (Bickmore and Picard, 2005). Utilizing HCD methodology allows for teen specific needs to inform the design process.
Although many teens are similar in their need for socialization, as individuals, they are strikingly different from one another. Bell (Little et al., 2016) identified this strong individual variance within a teen population as resulting from the diverse sociocultural environment in which adolescent development occurs. Large variance in teens’ perspectives needs to be considered during design with this population. However, the diverse range of perspectives can also provide useful insights that directly benefit technology design by ensuring acceptability and appropriateness.
Researchers have realized that the uniqueness of teens, both as a generation and as individuals, benefits the design process and supports the need for an HCD methodology for studying teen populations (Read et al., 2013; Fitton and Bell, 2014; Fitton et al., 2016; Little et al., 2016; Rose et al., 2018). For example, participatory design methods prove extremely valuable when working with unique and vulnerable populations such as teens (Kensing and Blomberg, 1998). Fitton et al. (2016) recommended the use of participatory approaches to engage teenagers in design. Teens have successfully proved themselves as participatory co-designers in the design of new technologies (Ashktorab and Vitak, 2016), and health programs and information services for teens (Bowen et al., 2013). A few recent studies also suggest teens have shown engagement and success in the design of social robot prototypes (Rose and Björling, 2017; Björling et al., 2018; Rose et al., 2018).
Virtual reality is an emerging new technology which holds great potential in the domain of robotics and design. Considering that robot design is complex and cost-intensive, VR provides a useful platform for accelerating the design process by removing many of the real-world constraints. A well-designed VR environment creates a sensation in which individuals perceive themselves as embodied in a virtual environment (Blascovich and Bailenson, 2005; Sanchez-Vives and Slater, 2005). Recent developments in VR technology allow for a high degree of immersion and realness by occupying multi-sensory perceptions with hardware components (headset, earphones, and hand-held controllers) and delivering a convincing visual world in which users feel engaged (Jerald, 2015; Sherman and Craig, 2018). Being present with a physically embodied robot has been shown powerful when compared to non-embodied conditions, such as robots on a computer screen (Bainbridge et al., 2011). Therefore, the combination of sensory stimuli and immersiveness provided by the VR environment, likely mimics some of the real-world effect of being present with a physically embodied robot.
Considering its advantages, the VR platform also can be leveraged as a design environment. VR has a large range of freedom in the way design and experiences can be constructed (Bailenson et al., 2008; Dede, 2009; Ahn et al., 2013). In the real world, an experience of each individual is tied to his or her own physical and social contexts. Both are pre-determined by the characteristics of the venue in which the users are located (e.g., a classroom). VR, however, can accommodate a greater level of flexibility in one’s experiences including multiple perspectives, reduced perceptual constraints (e.g., having a vivid sense of flying), and even customizable avatars for one’s own self (Bailey et al., 2016).
More recently, empirical studies have explored diverse applications for VR as a design tool. VR has been utilized for design in many industrial domains such as engineering, ergonomics, construction, consumer goods, etc. (Berg and Vance, 2017). Arrighi and Mougenot (2016) developed a digital tool that utilizes the immersive, physical interfaces of VR environment specifically for prototyping. The user can access and interact with the content displayed in the VR space to manipulate the hardware system, a modular tangible user interfaces (TUIs). Such a system helps users to actively engage with the design process through a high level of both immersion and control.
With its highly immersive, situated environment that creates embodied experiences, VR also has a strong potential to support collaboration. For smooth collaboration, non-verbal cues such as gesture, eye gaze, or posture become important because they convey a large amount of social information (Mehrabian, 1968). The VR environment is capable of incorporating such non-verbal human expressions and enables real-time social interactions (Sherman and Craig, 2018) that increase the quality of collaboration (Barsalou et al., 2003).
In immersive VR, users can smoothly interact within the environment by perceiving their own presence, virtual objects, and the presence of others (Jerald, 2015). Although current VR technology needs further improvement to completely reproduce every subtle detail of non-verbal interactions (e.g., delicate muscle movements in facial expressions), embodied experiences built on presence are effective enough to bring social realism to the virtual space in which users are located, which (Slater et al., 2006a; Slater et al., 2006b), which becomes ground for embodied social interactions among a group of people.
Several attempts have been made to design a collaborative VR environment. The form of collaboration in VR can be asymmetric (Clergeaud et al., 2017), meaning a collaboration between a person outside VR and another person inside VR. The collaboration can be symmetric (Greenwald et al., 2017; Lacoche et al., 2017), allowing multiple users to share the same VR environment.
In an asymmetric collaboration design, generally two people are paired; the outside person sitting at a desktop computer, observes or instructs the other person who is immersed inside VR. Clergeaud et al. (2017) suggested an advantage of asymmetric collaboration can be illustrated by an aerospace expert and a technician who are located remotely. While a technician ran a task assembling 3D mock-ups in VR, an expert outside VR could monitor the detail of the procedure which the technician might overlook. In that sense, asymmetric collaboration in VR can be particularly useful when embodied performances requires the observer’s real-time communication, feedback, or guidance. For example, the popular game, Keep Talking and Nobody Explodes in which one player is in which the VR player attempts to diffuse a bomb in while the non-VR player is communicates verbal instructions to communicate verbally (Games, 2015).
In symmetric collaboration design, two or more people perform tasks together, interacting within a shared VR environment. For example, Greenwald et al. (2017) designed a multi-user space for creating and designing virtual objects together for educational purpose. They found, however, some users performed the task collaboratively while others worked independently. The degree of social interaction varied across the pair of users, which implied that providing a multi-user context did not automatically initiate collaboration but depended on users’ intention and interest.
Given our previous work with teens on co-designing social robot prototypes in real world spaces Rose and Björling (2017); Björling and Rose (2019), we leveraged the unique affordances of VR (unlimited space, ability to instantly size and customize robots) while gathering rich data from teens about social robot embodiments and behaviors. We were also interested to leverage this platform as a tool by which to elicit rich, experiential data from teens during collaboration. Throughout the design process, we paid close attention to the unique needs, opinions, and preferences of teens in order to ensure engagement and appropriateness in our VR game design.
For our exploration, we set the design goal of engaging teens in the design process of a collaborative VR game that invites them to build a social robot together. Our research goal was to pilot test this VR game to elicit and capture the details of both teen-teen and teen-robot interactions during the gameplay.
In a previously published late breaking report (Kim et al., 2019), we briefly described several user design sessions with teens that led to the development of our VR Robot Designer game. In this paper, we cover the design process in more detail and include new findings resulting from a pilot test of our mid-fidelity VR game. Finally, we discuss the interaction styles that resulted from the asymmetric VR game.
This work included US high school teens ages 14–18 recruited from three Pacific Northwest urban high schools. Prior to conducting the current study, we obtained university IRB approval as well as school district research review. Teens were recruited from local area high schools through word of mouth and social media. Upon introduction to the study, we made sure all participating teens read, understood, and maintained a copy of the consent/assent form. Teen participants completed a brief demographic intake including their age, grade and self-identified gender and preferred pronouns. The consent/assent form and researchers reiterated that participation was voluntary and teens could disengage at any time. All photos and videos were used only for research purposes. Demographic details of cohorts for each design phase are described in Table 1. The VR and computer science clubs were both convenience samples. We met with the VR club multiple times so the number of students differed during each session. More detailed demographics are available for the teens who participated in the pilot study in Section 5.1.1.

TABLE 1. Demographics of teen participants for both the design phases and pilot testing.
To achieve the design goals, we engaged three school community groups of teens as co-designers through three human-centered design phases: 1) Ideation and Sketching, 2) Card Game Prototyping, and 3) Usability studies. Through these phases we developed design principles and requirements for the eventual Robot Designer VR Game. Each of these requirements is illustrated in Table 2.
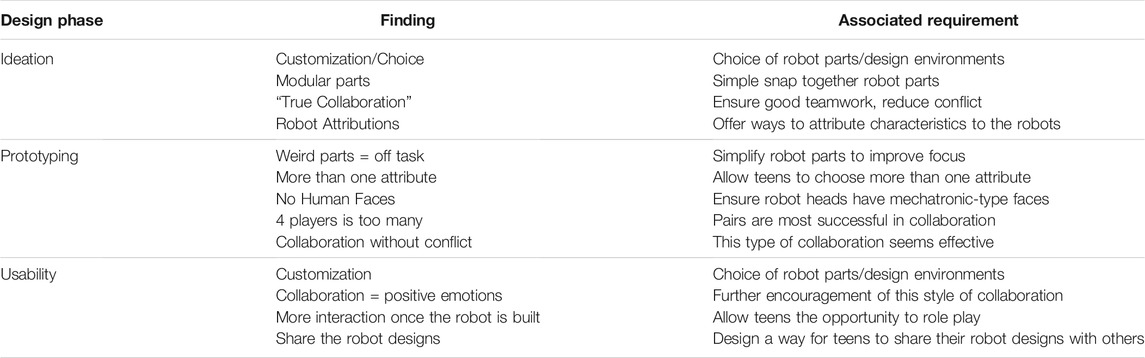
TABLE 2. Design principles and requirements resulting from the three design phases.
As part of a human-centered process, participants were engaged as co-designers and expert informants as evidenced by design artifacts, survey responses, gameplay video recordings, and exit interviews. All of these data were captured and analyzed using a customized, thematic analysis Guest et al. (2011) with an emphasis toward user experience. Qualitative data were collaboratively analyzed by the research team with an emphasis toward the development of game requirements during the design phase and user experience during the game testing phase. In both cases, salient qualitative data were extracted from the raw data and thematically organized based upon the research question for that stage of the design. Given the diversity and uniqueness of teens, the researchers paid close attention to both common and outlier data in order to best understand the breadth of experiences. Qualitative data were also used to help contextualize the experiences supporting the teens’ survey responses. During the building of design requirements, data were analyzed in an effort to ensure engagement with the virtual reality environment.
The first design stage was an exploration with teens about an appropriate environment for robot design. For the first stage, we worked with the VR club cohort at a local high school. We conducted a 45-minute participatory design session. In a large group setting, we asked teens to articulate what environments they felt were appropriate for the design of a robot with a peer. We provided teens design materials (e.g., colored papers, pens, sticky notes etc.) to freely visualize their ideas. We then discussed with the teens the idea of using VR as a format for social robot design to further elicit their ideas about the game. Teens expressed that VR might be a fun and appropriate platform by which to design a robot and understood the benefit of designing in a VR environment would remove many of our real-world constraints. This session led to four design requirements for our VR game discussed in detail below; 1) a choice of environment and robot parts, 2) a modular robot building system, 3) true collaboration (needing the other player to succeed), 4) a way to attribute roles or characteristics to the robot.
Choice of environment and robot parts: Teens provided detailed drawings and verbal articulations of a diverse range of design environments including common spaces such as a school library and more elaborate spaces such as as starry meadow, castle grounds or a “cozy workshop.” In discussing their designs, teens suggested that a school classroom might be most comfortable for the task of designing a robot, but others felt a creative space might elicit more design creativity.
Modular System: During the brainstorming, we also encouraged teens to imagine the process of robot design and verbally describe it. Teens proposed several unique ideas; for example, one of teens suggested a modular system in which different robot parts (e.g., head, arms, legs, etc.) could be added, removed, or exchanged for customization.
True Collaboration: Teens expressed a desire for collaborating with their peers to build a social robot together. They also expressed a desire to have a “truly collaborative” environment which was described as a well-designed game in which they felt connected to one another and could successfully work together to design a robot. Being insightful, some also speculated about potential conflict during collaboration. Two teens chimed in during the discussion: Teen 1: “What happens if two people disagree?”
Teen2: “Yeah, what if the whole thing turns into fighting? We’d need to plan for teamwork.”
Robot Attributes: Finally, teens also discussed and described what they felt were appropriate robot attributes via actions and behaviors, using sticky notes. Teens suggested that robots should be “good listeners”, “sensitive to the needs of teens”, and be “helpful.” Based upon this discussion, we concluded that in addition to designing a physical robot, teens desired their robot design to also have attributes that felt were appropriate and contextual.
In order to deepen our understanding of teens’ needs and preferences, we were inspired by the Robot Design card game (http://robot-design.org/) to develop our own card game, based upon our initial requirements. It was important to test our preliminary game design in a low-fidelity format, thus the card game was an ideal method for prototyping.
Card Game Development: In order to include a variety of choices for customization, the card game included six background cards (drawn from teens background drawings) for teens to choose as their design space in the card game (Figures 1A–D). In response to modularity, we created diverse robot parts cards including five heads, five facial expressions, four arms, six bodies, seven leg options, and other accessories (E.g., Figures 1E–J). We also included several faces (drawn from images of commercial robots) to understand what specific facial features would be preferred by teens. For characterization, we designed robot attribute cards (e.g., listener, helper, chat buddy, supporter) based upon desirable robot characteristics mentioned by teens during our ideation design stage (Figures 1K–N). Finally, we designed the game for collaboration in order to explore how teens would collaborate and explicitly whether teens would encounter conflict. We prepared each of the game cards and a set of instructions for small groups (2–4) to try out and give feedback.

FIGURE 1. Examples of game cards including design environments (A–D), modular robot parts (E–J), and robot attribute cards (K–N).
Card Game Play: See Appendix A for the complete game instruction. Teens were separated into groups of two to four players and given one deck of cards to each group. After jointly deciding upon a robot design background, teens took turns adding or swapping parts until they thought their robot was complete. They were instructed to talk with each other about why they were adding or removing a particular robot part. Once their robot was complete, they were asked to choose an attribute card that best represented their robot (Figure 1). Playtime was limited to approximately 5 minutes for fast rotations and rapid prototyping.
Card Game Prototype Testing: We conducted two card game play sessions with the computer science club cohort and the VR club cohorts. The computer science club cohort (n = 12) was a preliminary session to explore feasibility and usability of the card game in which we gathered observational data about collaborations and game play. In this session, we learned that teens enjoyed this simple collaborative card game, but groups of more than two teens were not as enjoyable or productive. Teens in groups of three or four tended to get off task or some felt left out of the building process. After teens played the game twice, we conducted an open-ended group interview to explore their experience, preferred environments, and which cards were less desirable.
We quickly learned that the eccentric non-robot objects (e.g., spatula or coffee cup) led to the teens getting off task from the purpose of robot design. Figure 2 for an example. These items were removed from the game before we conducted our next testing session. Teens also shared that they disliked hyper-realistic design spaces (e.g. a design studio) and humanoid robot parts which were called, “creepy.” They liked the typical robot parts and wanted more robot part options (e.g. wheels as legs).
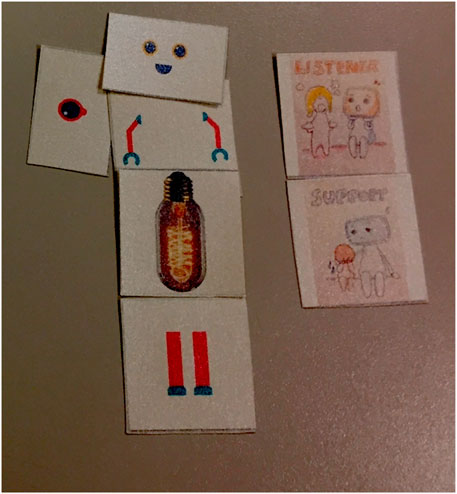
FIGURE 2. Sample of a completed robot prototypes from the card game.
In response to teen feedback, we revised the card game to remove humanoid parts, random objects, the hyper-realistic environments, and we added more variety of typical robot pieces. We then conducted a play session and usability survey with the VR club cohort (n = 11). We instructed teens to play in pairs rather than larger groups. The survey used a 5-point emoji likert scale similar to Rose Rose et al. (2018) representing ratings from “Absolutely No! (Totally disagree)” to “Absolutely Yes! (Totally agree)”. The survey measured satisfaction, desire to play again, and design style preferences (e.g., hand-drawn, realistic, anime). After teens completed these questionnaires, we invited the whole group to provide further, verbal feedback about how they felt about their collaboration and the game in general.
Teens expressed their enjoyment in collaborating to build the robot. The average enjoyment for the card game was 4.11 out of 5 (n = 9). Five of the nine teens responded that they would definitely play it again. All teens indicated they enjoyed playing the game with their peers using descriptors about the game such as, “cool”, “pretty good”, “fun”, “innovative”, “interactive.” Interestingly, even though it was a concern of teens in the ideation stage, no conflicts were observed during the card game play sessions.
All teens showed a very strong preferences for the robot attribute cards and even begged to modify the rules to allow them to choose more than one. For example, one 17 year old male when told to chose one attribute said, “But our robot is so cool, he’s a good listener AND a helper, we have to have both. Can we please have two (attribute cards)? Please?”
Based on the teens’ feedback from the card game session, we identified preliminary requirements for the low-fidelity VR game design. We confirmed that modularized robot parts were successfully used in collaboration. We also decided to keep the idea of robot attributes for the future implementation as teens clearly expressed a strong liking for attributes for their robots and to have the option for more than one. Finally, we observed successful collaboration that seemed strongest in groups of two.
VR Game Development: The third phase of the design study involved development of a low-fidelity game in an immersive VR platform for the purpose of usability testing. For customization, we created two design environments, a classroom and an outdoor meadow, using Unity software (web, 2018c). We used Rhino (web, 2018b) and Blender (web, 2018a), to design 3D robot parts similar to our card game and then imported them into the design environments for further interaction design and game play. We used a HTC Vive virtual reality system (web, 2018d) and desktop computer with Windows 10 and NVIDIA graphics card in order to optimize the VR experience.
For the context of collaboration of two teens, we decided to use an asymmetric collaborative design (Clergeaud et al., 2017) in order to promote communication between teens and attempt to ensure a positive collaboration. Moreover, we assigned different roles and capabilities to each player such that collaboration is necessary for a successful robot assembly. In the VR game, the VR player (the one using the VR headset) and the computer player (the one using the desktop computer with audio/mic headset) collaborated to choose parts and assemble a robot in the VR space. See Figure 3 for an illustration of the asymmetric environment. The computer player could see the VR player (represented by a transparent sphere) and had access to choose a setting (school classroom or outdoor field) and a catalogue of numerous robot parts (heads, bodies, arms). When the computer player selected a robot part, it would appear on the conveyor belt in the VR player’s environment. The VR player was located in an open space, allowing them to physically walk around to build the robot. They assembled the robot parts onto a sphere-shaped robot frame. This frame allowed the VR player to attach and remove any robot parts they desired. Once the robot was assembled, the computer player could teleoperate the robot using a keyboard and modify the robot size using a slider scale until both teens agreed the robot was the appropriate size. After sizing the robot, the computer player could then pilot the robot around the room to interact with the VR player. Throughout the game, players were collocated ensuring the VR player had plenty of room to wander around without bumping into the computer player. They easily communicated via their headsets and microphones.
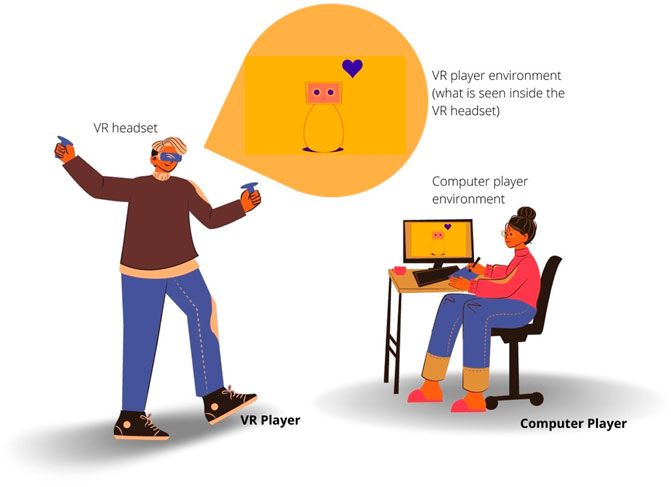
FIGURE 3. Illustration of the asymmetric setup where each player has specific abilities creating a forced, but enjoyable collaboration.
VR Game Usability Testing: In order to explore the usability, feasibility and enjoyment of our low-fidelity prototype of our VR game, we conducted a pilot usability testing session with the VR club cohort. During the 45-min session conducted in their high school library, teens (n = 14) paired up and played the game by taking turns in both the VR and computer roles. We then asked players to fill out a brief usability survey and invited them to verbally share their experiences.
A total of seven pairs of teens had played the game and alternated into both roles internal (in VR) and external (at the computer). Teens collaborated to design a robot together and communicated throughout about their likes and dislikes. After design they engaged in interacting with the robot they created in VR.
After the gameplay, we asked them to fill out a brief usability survey. Similar to the survey used with the card game prototype, we invited teens to rate their enjoyment of the game, their satisfaction with the collaboration, and how much they liked their final robot and what they might change about the game.
Similar to the card game prototype, teens strongly liked the VR game and the collaboration activity to build a social robot. Average enjoyment of the low-fidelity VR game was 4.14 out of 5 (n = 14). The average rating of collaboration was 4.43 out of 5 (n = 14). Teens willingly and voluntarily switched the player roles and all participating teens eventually played both the computer and VR roles.
From their verbal feedback during and after gameplay, we learned that teens 1) easily adapted to the asymmetric game design and enjoyed the collaboration in VR, 2) desired further interaction with the completed robot, and finally 3) wanted to share their completed robot designs with their family and friends. Teens’ feedback from the usability session helped construct the major design requirements for further VR game development and an eventual pilot testing of the environment.
From the teen feedback, we improved some usability aspects of the game. We added ambient audio, and object audio such as the sound of the conveyor belt. We gave the VR player the ability to control the conveyor belt start, stop and speed. Although we knew that robot attributions were an important component to the VR game, we decided to elicit more detail about attributes through a card sorting activity after game play. To add to the experience we also included a 3-min timer located on another robot in the design space that teens could reference for time (Figure 5A. And we included a larger catalogue of robot parts. For an example of diverse set legs of legs on the conveyor belt see Figure 5B.
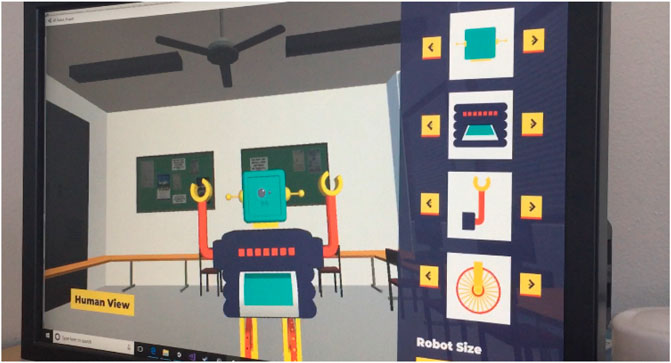
FIGURE 4. A screenshot of a completed robot from computer player’s view in the mid-fidelity version of the game.
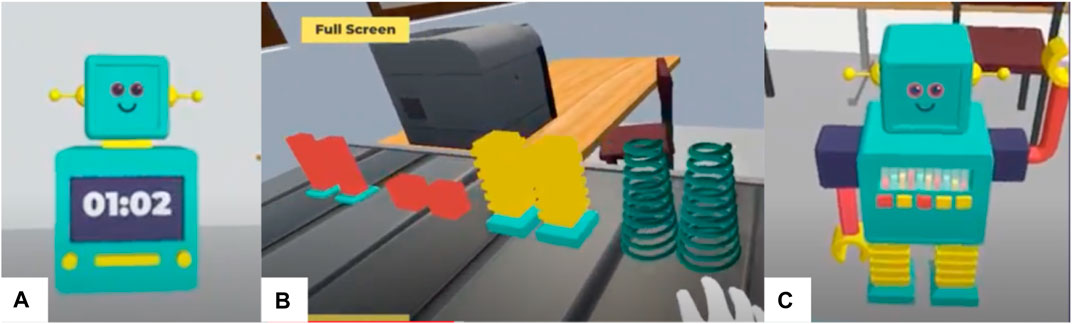
FIGURE 5. Screen shots of objects in the mid-fidelity VR Robot Designer game. (A) The robot clock in the game to help encourage rapid prototyping. (B) The conveyor belt with various robot leg options. (C) A completed robot design.
Our research questions for this stage of the project were:
1) How do teens collaborate in this asymmetric environment to build their robot?
2) What types of interactions and activities do players envision once the robot is assembled?
The mid-fidelity game was pilot tested with a convenience sample computer science class cohort. This cohort consisted of 18 students from three different computer science classes. Students played the game in pairs. Students engaged with the VR game as part of a robotics exposure day in their CS class. Participants played the VR game in pairs and then participated in a Post-VR design activities and interviews. The teen pairs were video and audio recorded during gameplay. Post-VR design activities included 1) card sorting and discussing robot attribute images, 2) Ideation about how to share their robot prototypes, and 3) Futurizing about next steps for the VR game.
In our sample of 18 teens, 11% had used VR more than 5 times, 44.5% had used VR 1–2 times, and the other 44.5% had never tried VR before. 28% said they were very interested in VR, but overall, the average interest in VR was moderate (3.83/5). Our teens were 14–18 (m = 15.94) in grades 9–12 (m = 10.69). The teens self-identified as 41% White/Caucasian, 18% Asian, 18% African American/Black, 6% Latino, 12% Mixed-Race, and 6% “prefer not to answer.”
In terms of engagement almost all of the teens enjoyed playing the robot designer game. All of the pairs were able to successfully assemble a robot together and after assembly, play with sizing and moving the robot around. Most teens (70%) needed little instruction for both computer or virtual reality roles. One teen however, struggled with the HTC Vive remotes and suggested that they would prefer not to play VR given this difficulty. For examples of teens playing the mid-fidelity VR game, Figure 6. What was notable was that for two pairs, there was not verbal interaction during gameplay. The pairs were still able to assemble a robot and complete the tasks, but they had no verbal communication together.

FIGURE 6. Players during the usability testing: VR and Computer players.
During the robot card game and VR collaborations, teens expressed desire to see emotional expressions from the robot and to customize their social robot with empathetic characteristics and behaviors. We witnessed a strong preference for the robot body part with a heart design on it during the card game. After playing the VR game, teens suggested hugging was one of the most desirable attributes for the robot. In a post-VR futurizing session, one of the teens suggested the robot could give the player a hug to thank them for completing the robot (Usability Study). During the VR gameplay, we had many examples of teens talking about hugging. As one VR player completed the robot assembly, one computer player said, “it’s done. Great, give me hugs, robot!” and then immediately became the robot and said “Hug me, I am a hugging, caring robot!” (Usability Study teens). This becoming the robot theme stretched across both the Usability and pilot study, but was much more pronounced in the pilot study scenario. During our card sorting activity where teens explored various potential robot attributes, many teens liked the idea of the robot attribute being a good, empathetic listener. For example as one teen said, “I want the robot to be a resource so that I can talk out the problem … I’d rather the robot to listen, not to suggest solutions” (Male, 16, Pilot Study).
During both the user and pilot studies, we witnessed the computer and VR player embodying the robot through behavior and voice. Occasionally this occurred during the robot build phase, but more often once the robot was determined complete by the pair. In one example, while assembling the robot together, the VR player immediately began referring to the robot as “me.” “Gimme legs, dude! You gotta grab the other one to turn it on. Click the other one. Put these legs on me!” (Usability Study). Another example of embodying the robot happened in another pair in which the VR player heard an onlooker’s criticism of their robot and responded, “Hey I’m beautiful my way. My father here is creating me how I look.” (Male, 18, Pilot study). Although teleoperation of the robot was only available to the computer player, robot role play seemed to be transferable between the two players. In one pair, both players took the role of the robot almost simultaneously. The VR player had just attached two arms to the robot skeleton to complete the robot and then said, “I am arm!” Then the VR player began driving the robot around and said, “I am arm! Fear me! My name is arm!” (Usability Study). They continued back and forth, both teens enjoying a shared role-play of embodying the robot. In another example, the VR player finished assembly of the robot when the computer player said in a robotic voice, “Love me. Love me. I am a robot. Give me love” (Male, 17, Pilot Study) once the robot was completed.
Teens in the usability and pilot study had very explicit desires for the future of this VR game. They saw the collaborative nature as an opportunity for learning important skills and for sharing experiences. For example, one teen suggested the interaction could result in experiencing inclusion among teens. “(In the game) I want the harmony of people from different backgrounds, the acceptances for different people” (Female, 14, Pilot Study). Many teens eluded to the attribute of the robot being a good listener and that this could provide an opportunity for teens to share their troubles, “I want the robot to listen and give validation….When I am stressed or having issues with things, I can get a different point of view” (Male, 16, Pilot Study).
Finally, a small group of teens from the usability study postulated that the future of the robot designer game could become a mission in which teens work together to teach the social robot emotional intelligence. They suggested the game could consist of difficult scenarios that required emotional intelligence in which the humans would train the robot. One such example was exposing the robot to a crowded hallway of teens and train the robot to recognize when a teen was in trouble. Many teens were on board with this idea of training the robot for emotional intelligence as a fun and appropriate use of the game.
Conversation during the game play was mostly about requesting and generating robot parts, deciding which robot part to use or deciding robot size and facial expression. Throughout the session, the most commonly chosen robot part was a chest piece with the heart on it. We also observed that teens expressed positive emotions not only toward the game itself, their custom robots, but also toward each other during the game play. Once a robot was completed, they often cheered together and shared positive emotions from the accomplishment. It is worth noting that after witnessing 32 teens engage in the VR Robot Designer game, we saw not one example of disagreement or conflict between collaborators. This suggests that our initial game design, has the appropriate components necessary for successful and satisfying collaboration.
In our pilot study in a school classroom, we saw more formal roles during the collaboration and less role play and playfulness. One such role was witnessed in three pairs in which the computer player took on an instructor role, helping the VR player to navigate the game. So rather than a shared collaboration, the computer player gave explicit, tactical instructions to the VR player, almost as if the computer player had played many times before. For example, one female teen (age 16) said, “Okay, turn around and now put the arm directly on the green dot thing … just like that. Yes. Good job.” She continued to instruct the VR player throughout the entire game play. This type of dynamic felt much less like a collaboration and more like an instructor/student dynamic.
Another type of interaction we saw indicated by four pairs of teens included the computer player being a verbal narrator throughout the game play. This happened in two pairs from the pilot study. In one example, the computer player shared their dashboard view of what was happening with the VR player. “Okay, I have a catalogue of robot parts and I will tell you what they look like. I have one body part with a heart on it. I’m going to put the body on the conveyor belt” (Female, 17, Pilot Study). Another example illustrates the computer player (Male, 17, Pilot Study) narrating with a positive tone to assure the VR player (Male, 16, Pilot Study).
Computer player: We’re going to go for a different look this time. I’ll move the robot closer for you. I’m sending you a part to make a nice match for our robot.
VR Player: What is this?
Computer Player: I’ll send you a left arm now. Here comes the left arm. It’s coming toward you.
VR: Okay. Let me grab it … oh, I didn’t get that.
Computer: Okay, I’ll send it again. I’m going to select it first, and now I’m sending it.
The choice for an instructor or narrator role may have been appropriate in the school setting, or perhaps a recognition that the VR player was unable to access or understand the computer player’s abilities in the game.
Previous work exploring asymmetric designs in video games and virtual reality has been shown to increase enjoyment and engagement during gameplay (Gugenheimer et al., 2017; Harris and Hancock, 2018). However much of the previous research has explored adult populations providing little evidence about asymmetric environments designed for adolescents.
Role play may be an important factor during asymmetric video gameplay. (Harris and Hancock, 2018) found participants’ self-report experience metrics in the asymmetric condition resulted in a significant positive effect on participant’s perceptions of connectedness, engagement and immersion, but these effects may have been somewhat moderated by the players role in the game. Although not designed for roleplay, our asymmetric VR game design had the interesting unintended effect of eliciting role play through teleoperation of, and being present with, the robot. While playing the VR game, many pairs of teens–both the outside and the VR player–identified with the robot they were building. We observed multiple instances of teens organically slipping into what we referred to as “being the robot.” We cannot explain this as a result of the embodied immersion of VR given that computer players were as likely to embody the robot as well. However, role play, although more common in children, may be appropriate and valuable in teens. Role play has been used successfully to help adolescents with autism learn social skills (Ratto et al., 2011), help neurotypical teens manage social interactions (Parsons, 2015), help teens avoid substance use (Thomas et al., 2015) and even to help teens learn about civics (Lo, 2017). Given how common role play is in current video game environments, it is plausible that VR is perceived as a video game and therefore intuitively allows teens to slip into role play.
Overall, we saw positive and engaging interactions among all teen pairs. However, more playful, role play behavior was seen in the usability study which took place during an after school, club setting. The pilot study was during class time in a computer science classroom where VR game play interactions were slightly more formal. Although this distinction is not surprising given the different real-world contexts in which the teens played the VR game, it is important to consider the real-world context for future asymmetric design and interaction studies. Given that the computer player was not immersed in VR, they remain aware of, and apart of, the real-world context which likely influences their interaction style and maybe preferences. We also noticed that if the computer player took on a more formal or more playful interaction style, the VR player typically matched this style of collaboration, suggesting the computer player may set the collaboration tone for the pair.
In terms of the context of collaboration in VR, the asymmetric design of our VR game not only enabled easy prototyping of social robots, but also encouraged communication skills in teen-teen interactions. As each player had to relied on one other to complete the robot design, teens were expressive with one another, and seemed to easily share their design ideas aloud. Through a systematic review, (Depping and Mandryk, 2017), found that cooperation and interdependence were key factors for social relatedness during gameplay. Additionally, they found that interdependence increases the need for conversational turn-taking which increased engagement. These data from adult studies may help us to understand why teens found our asymmetric design which required interdependence so appealing. Additionally, given adolescents are in a period of social-emotional development (Blakemore and Choudhury, 2006; Little et al., 2016), using VR as a collaborative design environment seems to effectively support both teen’s needs for expressing their design preferences and engaging socially through constructive collaboration. For this reason, we find potential of a VR platform for supporting teens’ socioemotional needs, and even further, acquiring necessary social skills through collaboration.
Although we gathered rich, qualitative data, our small pilot of the VR environment limits the generalizability of these data to other projects. We witnessed a great deal of role play from players who self-identified as male in our studies, however, it is worth noting that our VR club was mostly male, therefore, it is unclear whether gender may be related to this instinctive role play. In addition, our VR game is still in an exploratory stage and our findings need to be contextualized to this very limited VR environment. We plan to conduct further field studies with more teens to better understand teen-teen and teen-robot interactions as we make progress in the development. We are also interested in exploring the teens’ ideas of building this out further into a full VR game aimed to explore emotional intelligence. Given the current climate of decreasing teen mental health (Imran et al., 2020), we believe the platform is promising for engaging teens in a collaborative interaction. In this context, however, it may also be a potential tool for social emotional learning.
Moving forward, our next iteration of the game will continue to integrate ideas and needs articulated by teens, including 1) diverse forms of social interactions (e.g., avatar, role play, etc.), 2) addition of identifiable robot attributes, and 3) a platform that allows for submitting and sharing final robot designs. Finally, through the design and development of our VR game, we recognized the effectiveness of a VR platform as not only a design tool, but also as an engaging collaborative platform for gathering interaction data from teens. Given this potential, we anticipate several future applications for the study of teen-teen interaction through VR collaboration.
In our study, we used participatory, human-centered design (HCD) methodology to explore the potential of VR as a design platform and elicitation method for teen-teen and teen-robot interaction. From the preliminary usability study and pilot test of the VR game, we observed that teens enjoy a collaborative, asymmetric environment in which to work together to design a robot. In addition, we learned that teens desire empathetic interactions with social robots, even in VR. Finally, we learned that the real world setting in which asymmetric VR takes place may have a significant impact upon their chosen role and how they engage with one another. This study highlights the potential for an asymmetric VR platform for both collaborative design and human-robot interaction studies, especially involving teens.
The datasets presented in this article are not readily available because our dataset is primarily qualitative raw data from minors, we do not have consent to share the data set outside of our research team. Requests to access the datasets should be directed to YmpvcmxpbmdAdXcuZWR1.
The studies involving human participants were reviewed and approved by the University of Washington Institutional Review Board. Written informed consent to participate in this study was provided by the participants’ legal guardian/next of kin.
This study was conceived by EB and AK. The design sessions and pilot study were carried out by EB and AK. All authors helped with data analysis and writing of the paper.
This project was funded in part by: National Science Foundation: National Robotics Initiative, SES: Award Abstract 1734100—Design and Development of a Social Robot for Gathering Ecological Momentary Stress Data from Teens.
AK was employed by the company Information and Technology Services, BankSalad.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
We would like to acknowledge the many teens and their valuable time in providing us with data and support for this project.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frvir.2021.746521/full#supplementary-material
Ahn, S. J., Le, A. M. T., and Bailenson, J. (2013). The Effect of Embodied Experiences on Self-Other Merging, Attitude, and Helping Behavior. Media Psychol. 16, 7–38. doi:10.1080/15213269.2012.755877
Arrighi, P.-A., and Mougenot, C. (2016). Towards User Empowerment in Product Design: a Mixed Reality Tool for Interactive Virtual Prototyping. J. Intell. Manufacturing, 1–12. doi:10.1007/s10845-016-1276-0
Ashktorab, Z., and Vitak, J. (2016). “Designing Cyberbullying Mitigation and Prevention Solutions through Participatory Design with Teenagers,” in Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (New York: ACM), 3895–3905. doi:10.1145/2858036.2858548
Bailenson, J. N., Yee, N., Blascovich, J., Beall, A. C., Lundblad, N., and Jin, M. (2008). The Use of Immersive Virtual Reality in the Learning Sciences: Digital Transformations of Teachers, Students, and Social Context. J. Learn. Sci. 17, 102–141. doi:10.1080/10508400701793141
Bailey, J. O., Bailenson, J. N., and Casasanto, D. (2016). When Does Virtual Embodiment Change Our Minds? Presence: Teleoperators and Virtual Environments 25, 222–233. doi:10.1162/pres_a_00263
Bainbridge, W. A., Hart, J. W., Kim, E. S., and Scassellati, B. (2011). The Benefits of Interactions with Physically Present Robots over Video-Displayed Agents. Int. J. Soc. Robotics 3, 41–52. doi:10.1007/s12369-010-0082-7
Barsalou, L. W., Niedenthal, P. M., Barbey, A. K., and Ruppert, J. A. (2003). Social Embodiment. Psychol. Learn. Motiv. 43, 43–92. doi:10.1016/s0079-7421(03)01011-9
Berg, L. P., and Vance, J. M. (2017). Industry Use of Virtual Reality in Product Design and Manufacturing: a Survey. Virtual Reality 21, 1–17. doi:10.1007/s10055-016-0293-9
Bickmore, T. W., and Picard, R. W. (2005). Establishing and Maintaining Long-Term Human-Computer Relationships. ACM Trans. Comput.-Hum. Interact. 12, 293–327. doi:10.1145/1067860.1067867
Björling, E. A., and Rose, E. (2019). Participatory Research Principles in Human-Centered Design: Engaging Teens in the Co-design of a Social Robot. Multimodal Tech. Interaction 3, 8.
Björling, E. A., Rose, E., and Ren, R. (2018). “Teen-robot Interaction: A Pilot Study of Engagement with a Low-Fidelity Prototype,” in Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (Chicago: ACM), 69–70.
Blakemore, S.-J., and Choudhury, S. (2006). Development of the Adolescent Brain: Implications for Executive Function and Social Cognition. J. Child. Psychol. Psychiat 47, 296–312. doi:10.1111/j.1469-7610.2006.01611.x
Blakemore, S.-J. (2012). Imaging Brain Development: the Adolescent Brain. Neuroimage 61, 397–406. doi:10.1016/j.neuroimage.2011.11.080
Blascovich, J., and Bailenson, J. (2005). Immersive Virtual Environments and Education Simulations. In Virtual Decisions. (pp. 239–263). Routledge.
Bonsignore, E., Koepfler, J., Guha, M., Ahn, J., and Kraus, K. (2014). Exploring Teen Co-design in Alternate Reality Games for Learning. CHI 2014 Workshop on Understanding Teen UX: Building a Bridge to the Future.
Bowen, S., Sustar, H., Wolstenholme, D., and Dearden, A. (2013). Engaging Teenagers Productively in Service Design. Int. J. child-computer interaction 1, 71–81. doi:10.1016/j.ijcci.2014.02.001
Clergeaud, D., Roo, J. S., Hachet, M., and Guitton, P. (2017). “Towards Seamless Interaction between Physical and Virtual Locations for Asymmetric Collaboration,” in Proceedings of the 23rd ACM Symposium on Virtual Reality Software and Technology (New York: ACM), 17. doi:10.1145/3139131.3139165
Dede, C. (2009). Immersive Interfaces for Engagement and Learning. science 323, 66–69. doi:10.1126/science.1167311
Depping, A. E., and Mandryk, R. L. (2017). “Cooperation and Interdependence: How Multiplayer Games Increase Social Closeness,” in Proceedings of the Annual Symposium on Computer-Human Interaction in Play, 449–461.
Fitton, D., and Bell, B. (2014). “Working with Teenagers within Hci Research: Understanding Teen-Computer Interaction,” in Proceedings of the 28th International BCS Human Computer Interaction Conference on HCI 2014-Sand, Sea and Sky-Holiday HCI (Swindon, UK: BCS), 201–206. doi:10.14236/ewic/hci2014.31
Fitton, D., Little, L., and Bell, B. T. (2016). Perspectives on HCI Research with Teenagers. Springer, 1–9. doi:10.1007/978-3-319-33450-9_1Introduction: Hci Reaches Adolescence.
Games, S. C. (20152015). Keep Talking and Nobody Explodes. Game [HTC Vive]. Ottawa, CA: Steel Crate Games.
Greenwald, S. W., Corning, W., and Maes, P. (2017). Multi-user Framework for Collaboration and Co-creation in Virtual Reality 12th International Conference on Computer Supported Collaborative Learning (CSCL).
Guest, G., MacQueen, K. M., and Namey, E. E. (2011). Applied Thematic Analysis. Newburypark: sage publications.
Gugenheimer, J., Stemasov, E., Frommel, J., and Rukzio, E. (2017). “Sharevr: Enabling Co-located Experiences for Virtual Reality between Hmd and Non-hmd Users,” in Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, 4021–4033.
Harris, J., and Hancock, M. (2018). “Beam Me’round, Scotty! Ii: Reflections on Transforming Research Goals into Gameplay Mechanics,” in Proceedings of the 2018 Annual Symposium on Computer-Human Interaction in Play Companion Extended Abstracts, 193–204.
Master’s thesis Hrpka, A. (2016). “Transition Game Design with and for Young People with Health Challenges,”.
Imran, N., Zeshan, M., and Pervaiz, Z. (2020). Mental Health Considerations for Children & Adolescents in COVID-19 Pandemic. Pak J. Med. Sci. 36, S67. doi:10.12669/pjms.36.COVID19-S4.2759
Kensing, F., and Blomberg, J. (1998). Participatory Design: Issues and Concerns. Comp. Supported Coop. Work (Cscw) 7, 167–185. doi:10.1023/a:1008689307411
Kim, A. S., Björling, E. A., Bhatia, S., and Li, D. (2019). “Designing a Collaborative Virtual Reality Game for Teen-Robot Interactions,” in Proceedings of the 18th ACM International Conference on Interaction Design and Children, 470–475. doi:10.1145/3311927.3325314
Lacoche, J., Pallamin, N., Boggini, T., and Royan, J. (2017). “Collaborators Awareness for User Cohabitation in Co-located Collaborative Virtual Environments,” in Proceedings of the 23rd ACM Symposium on Virtual Reality Software and Technology (New York: ACM), 15. doi:10.1145/3139131.3139142
Little, L., Fitton, D., Bell, B. T., and Toth, N. (2016). Perspectives on HCI Research with Teenagers. Springer.
Lo, J. C. (2017). Adolescents Developing Civic Identities: Sociocultural Perspectives on Simulations and Role-Play in a Civic Classroom. Theor. Res. Soc. Educ. 45, 189–217. doi:10.1080/00933104.2016.1220877
Mehrabian, A. (1968). Relationship of Attitude to Seated Posture, Orientation, and Distance. J. Personal. Soc. Psychol. 10, 26–30. doi:10.1037/h0026384
Parsons, S. (2015). Learning to Work Together: Designing a Multi-User Virtual Reality Game for Social Collaboration and Perspective-Taking for Children with Autism. Int. J. Child-Computer Interaction 6, 28–38. doi:10.1016/j.ijcci.2015.12.002
Ratto, A. B., Turner-Brown, L., Rupp, B. M., Mesibov, G. B., and Penn, D. L. (2011). Development of the Contextual Assessment of Social Skills (Cass): A Role Play Measure of Social Skill for Individuals with High-Functioning Autism. J. Autism Dev. Disord. 41, 1277–1286. doi:10.1007/s10803-010-1147-z
Read, J. C. C., Horton, M., Iversen, O., Fitton, D., and Little, L. (2013). “Methods of Working with Teenagers in Interaction Design,” in CHI’13 Extended Abstracts on Human Factors in Computing Systems (New York: ACM), 3243–3246. doi:10.1145/2468356.2479657
Rose, E. J., and Björling, E. A. (2017). “Designing for Engagement: Using Participatory Design to Develop a Social Robot to Measure Teen Stress,” in Proceedings of the 35th ACM International Conference on the Design of Communication (ACM).7
Rose, E. J., Björling, E. A., Kim, A., and Alvarez, N. Y. (2018). “Usability Testing with Teens: Adapting Human-Centered Design and Ux Methods,” in Proceedings of the 36th ACM International Conference on the Design of Communication.
Safaric, R., Sinjur, S., Zalik, B., and Parkin, R. M. (2003). Control of Robot Arm with Virtual Environment via the Internet. Proc. IEEE 91, 422–429. doi:10.1109/jproc.2003.809205
Sanchez-Vives, M. V., and Slater, M. (2005). From Presence to Consciousness through Virtual Reality. Nat. Rev. Neurosci. 6, 332–339. doi:10.1038/nrn1651
Sherman, W. R., and Craig, A. B. (2018). Understanding Virtual Reality: Interface, Application, and Design. Morgan Kaufmann.
Slater, M., Antley, A., Davison, A., Swapp, D., Guger, C., Barker, C., et al. (2006a). A Virtual Reprise of the stanley Milgram Obedience Experiments. PloS one 1, e39. doi:10.1371/journal.pone.0000039
Slater, M., Pertaub, D.-P., Barker, C., and Clark, D. M. (2006b). An Experimental Study on Fear of Public Speaking Using a Virtual Environment. CyberPsychology Behav. 9, 627–633. doi:10.1089/cpb.2006.9.627
Sustar, H., Bowen, S., Dearden, A., Fisher, M., and Wolstenholme, D. (2013). Using Popular Culture to Enable Health Service Co-design with Young People. EAD.
Keywords: virtual reality, participatory design, adolescents, asymmetric VR, collaboration
Citation: Björling EA, Kim A, Oleson K and Alves-Oliveira P (2022) I Am the Robot: Teen Collaboration in an Asymmetric, Virtual Reality Game. Front. Virtual Real. 2:746521. doi: 10.3389/frvir.2021.746521
Received: 24 July 2021; Accepted: 26 October 2021;
Published: 13 January 2022.
Edited by:
Jan Gugenheimer, Télécom ParisTech, FranceReviewed by:
Sylvia Terbeck, University of Plymouth, United KingdomCopyright © 2022 Björling, Kim, Oleson and Alves-Oliveira. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Elin A. Björling, YmpvcmxpbmdAdXcuZWR1; Katelynn Oleson, a2pvbGVzb25AdXcuZWR1
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.