 James Xorse Halivor
James Xorse Halivor
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Smart Grids, 11 December 2023
Sec. Smart Grid Control
Volume 2 - 2023 | https://doi.org/10.3389/frsgr.2023.1188074
The challenge of ensuring the reliable running of power systems has gotten more difficult in recent years due to the rising complexity of power system networks. The decreasing accessibility of fossil fuels has necessitated a greater dependence on renewable energy sources, such as solar systems, wind power, and hydroelectric power, by the international community. As a result, there is an increasing demand for AC microgrids to offer an effective approach for distributing power. The power system networks that consist of microgrids frequently have a significant number of failures, surpassing 80%. These failures occur because microgrids are susceptible to unexpected changes in different distributed generating sources. The variations greatly impair the operating efficiency of the microgrid and have negative consequences for the distribution system. The microgrid consists of numerous dispersed generation units and local loads. The load in a microgrid exhibits parametric uncertainty, which adds to the fluctuation observed in its performance. The formulated control strategy is Model Predictive Control, which aims to achieve robust performance even in the presence of unaccounted-for loads, dynamic loads, harmonic loads, and both balanced and unbalanced loads. The authors of this paper have developed a control approach that utilizes model predictive control (MPC) and is characterized by its robustness and optimality. MPC has the ability to predict the future behavior of a certain system. The controller successfully mitigates and reduces any disruptions that may occur within the power distribution system by taking into account its healthy characteristics. The model is implemented in the MATLAB Simulink environment, where it produces an accurate and appropriate total harmonic distortion value. The model was compared to previous efforts and significantly improved by increasing some crucial parameters by up to 90%. The value functions as a measure of the controller's performance quality and the improved efficiency of the microgrid system.
The depletion of natural fossil fuels in the contemporary era, resulting from unregulated consumption patterns, has spurred academics to seek more sustainable and environmentally friendly sources of energy. One effective approach to achieving optimal utilization of distributed generators (DGS), while also avoiding conventional transmission and switching losses, is by implementing a microgrid (MG) system. Renewable energy has emerged as a viable way to address the prevailing problem, leading to the adoption of decentralized electricity generation by both businesses and households alongside their reliance on the conventional power system. For numerous years, small autonomous grids have been employed in rural regions where establishing a connection to the primary power grid is impractical owing to technical or budgetary constraints (Olivares et al., 2014). Fossil fuel–based technologies have emerged as the predominant option for grid connection in remote grids, owing to their extensive utilization, and they possess the potential for expansion through competitive investment. Furthermore, there is a growing emphasis in MGs on the integration of these technologies into an optimal distribution system, driven by the proven technical and financial feasibility of utilizing environmentally friendly generation technologies such as hydroelectric, hydrogen, solar, wind, and other forms of generation methodologies. The term MG refers to the dependable integration of dispersed energy resources, such as energy storage devices and regulated loads.
Since the increasing popularity of MGs, its also necessary to control the distribution of voltages, current, frequency, and other parameters. Conventionally executed primary control by using a droop mechanism enables to provide frequency and voltage regulation by sharing reactive load demands in comparison to the inverters (Guerrero et al., 2009). The centrally structured control strategy is used for frequency and voltage restoration (Liu et al., 2015) and reactive power sharing (Micallef et al., 2014). The features and characteristics of distributed control and hierarchical control have been discussed by Mohiuddin and Qi (2020). Despite of having operational simplicity, droop control shows poor dynamic performance as well as high sensitivity to the noise of measurements (Wang et al., 2018). A new non-linear model predictive control based on a robust non-linear generalized predictive control strategy is proposed in Ouari et al. (2022). The authors' proposed linear control, finite control set-model predictive control (FCS-MPC) is based on a fundamentally different principle from Cortés et al. (2008) and John et al. (2015). Inductor capacitor circuit (LC) filterer voltage source inverter (VSI) introduced by the authors uses the FCS-MPC scheme from Cortés et al. (2009). Aziz et al. (2015) investigated the dynamic and static issues of wind power DGs. Wind power density prediction and forecasting are illustrated by Rodriguez et al. (2020). Xyngi et al. (2009) discussed the transient stability cases of grid-connected MGs. A transient classification of transmission line faults using a deep belief network has been presented by Bhuiyan et al. (2022). The dynamic response of different DGs during large disturbances have been researched by Kim et al. (2009), DG fault current contribution characteristics with various control approaches have been investigated by Han and Zhang (2011), and transient process-based simulations of an grid-connected MG have been illustrated by Jayawardena et al. (2012).
Extensive research has been conducted in the past to develop an appropriate control framework that ensures enhanced tracking performance in the presence of varying loads. Due to its simplicity, the proportional–integral–derivative controller is gaining popularity among practitioners. Our motivation lies in the development of control models that can effectively track input and output parameters while adhering to the limits outlined in previous scholarly works. The present discourse pertains to the enigmatic elements under consideration, namely, the consequences arising from abrupt oscillations in consumer demand, as well as the sustainable attributes associated with energy generation systems focused on harnessing solar power, such as irradiance and temperature. Furthermore, the inadequate performance observed can be attributed to the power demand necessary to fulfill the loads.
The implementation of distributed and decentralized regulatory systems enables the attainment of precise control over grid voltage, hence enhancing the feasibility of the process. The responsibility of parameter counting is managed by the remote block, which is integrated within the primary controller in these approaches. This code segment constitutes a component of the primary controller. Due to the suboptimal control loop response and constrained bandwidth of the controllers, their applicability is restricted to a finite range of applications. MGs have the capability to create electricity through the utilization of a diverse range of renewable energy sources (RESs), including solar, wind, hydro, and atmospheric resources. RESs have the potential to be utilized for generating electrical power. It is conceivable to develop a reliable and sustainable energy provision that prioritizes environmental preservation while effectively managing substantial growth in energy use and mitigating infrastructure expenses. This objective is attainable. At its fundamental level, an MG consists of many components, including loads, power electronics inverters and converters, points of common coupling, and RESs. Moreover, there exist several other constituent elements. This system offers the option to operate either in an off-grid or a grid-connected mode in order to fulfill the objective of supplying electricity to the load. The functionality of an MG in grid-connected mode is heavily dependent on the primary alternating current (AC) grid. There exists the potential for heightened transmission and investment depreciation when the power supply is situated at a considerable distance from the termination point of the generation process. Hence, the viability of a MG to function autonomously relies on the efficacy of its primary mover, commonly known as a DG unit. The growing utilization of DG systems in isolated settings leads to unintended reactions within the MG structure. The presence of stochasticity is frequently the characteristic that sets apart these reactions from others within their category. The effective functioning of DG units relies on various factors, such as consistent wind speed, the utilization of solar power for electricity generation, and numerous additional variables. The concept of MGs is increasingly gaining attention as a result of their cost-effectiveness in electricity generation from RESs, their potential to enhance local reliability, minimize feeder losses, and its ability to offer voltage support and correction for voltage sags. There are several factors contributing to the growing interest in the notion. The structure as elaborated in Figure 1 is the general outline for the organization of this paper.
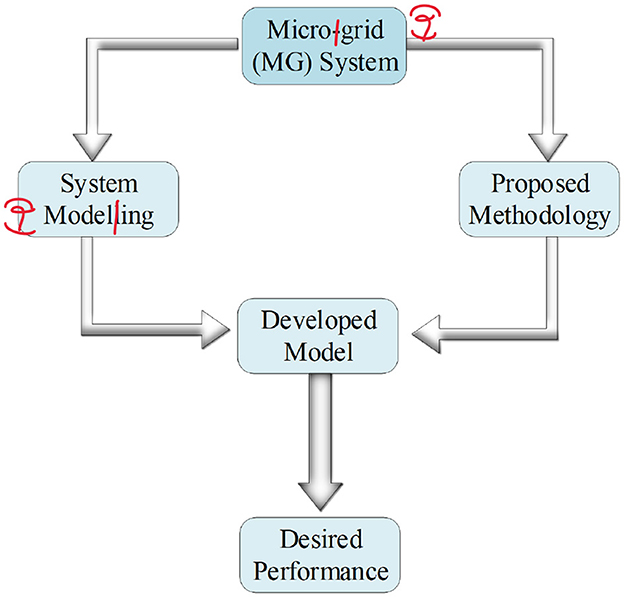
Figure 1. A basic layout of microgrid content organization.
This literature review investigates and discusses a wide range of topics connected to the topic of distribution control in AC MGs. AC MGs are decentralized power systems that integrate a variety of components in order to improve energy efficiency and dependability. These components include loads, energy storage devices, and RESs. Controlling and optimizing the operation of AC MGs is made significantly easier and more effective by the inclusion of distribution control. This article presents a thorough analysis of the underlying principles and critical concerns in distribution control systems for AC MGs, as well as a review of the most recent achievements in this field of research (Datta et al., 2020). In accordance with the claims that were made in the Introduction: The topic of discussion is AC MGs, including the definitions of each of those terms as well as the characteristics that set them apart from one another. The significance of distribution control in AC MGs cannot be overstated in any way. The justification for carrying out the literature review is as follows: The distribution of control objectives in AC MGs constitutes a subset of the broader set of control objectives and difficulties. Examples of control objectives in AC MGs include voltage regulation, power flow optimization, fault detection, and isolation. Concerns about the control of distribution inside AC MGs are included in the list of additional control objectives and challenges. These obstacles include things like sporadic power generation from renewable sources, two-way power flow, and complex system dynamics. In the academic literature, numerous control systems and processes have been described; some of these control systems and procedures are included later for your perusal. In order to improve the regulation of voltage and frequency in planned MGs, control systems with a hierarchical structure (Sarker et al., 2022a) that includes primary, secondary, and tertiary control have been developed. These control systems have also been implemented. Over the course of three separate phases, one is able to alter the level of control exercised over the controller. When unpredictability manifests itself at any of the control levels, it reduces that levels' capacities for power distribution. The procedures for model predictive control (MPC) and the algorithms for optimal power flow have previously been established through the course of this research. One facet of decentralized control involves the incorporation of a variety of ideas and principles, such as distributed control structures, which may include agent-based control and control based on consensus. In addition, droop control and power-sharing algorithms, as well as ways to control voltage and frequency, are examined within the scope of this context. A hybrid control system is a strategic approach that blends both centralized (Sarker et al., 2021) and decentralized control approaches (Sarker et al., 2022b), with a particular emphasis on encouraging effective communication and coordination across the numerous control units. Hybrid control systems have become increasingly popular in recent years. The implementation of protocols and standards inside remote control systems, such as IEC 61850 and DNP3, is what gives the communication and information infrastructure its significance. These protocols and standards are what make remote control systems possible. Because of the ramifications for cybersecurity that are associated with these systems, this is of the utmost importance. In addition, the function that the infrastructure plays in minimizing communication delays and ensuring that data has synchronized has a significant impact on the performance of the control. The fundamental purpose of this research is to offer academics, industry professionals, and policymakers important insights into the recent developments that have been made in distribution control for AC MGs. This will be accomplished by conducting a detailed and comprehensive review of the relevant published literature on the topic. In addition to this, it sheds light on the difficulties, possible solutions, and probable future directions that are envisaged in the development of this particular sector as shown in Figure 2.
Figure 2. Typical schematic for the microgrid system.
MPC has been widely recognized and proven to be highly advantageous in the context of cruise control due to its ability to anticipate and forecast the future dynamics of the plant or system. In the realm of autonomous industries, the utilization of MPC is prevalent owing to its expeditious dynamic response and its ability to incorporate non-linearities and limitations into the controller (Yaramasu et al., 2013). In the realm of MG operations, MPC has emerged as a prominent approach due to its considerable efficacy and applicability. The utilization of MPC is highly suitable for managing the distribution control of a MG. This is because the fundamental aim of a MG system is to provide reliable electrical power to consumers while maintaining system stability. By employing MPC, the MG can be effectively regulated at regular intervals, thereby facilitating a consistent and stable distribution of power to consumers. To effectively manage the distribution of a MG, it is imperative to address and overcome many challenges related with system control. The challenges encompassed in this context encompass energy flows, stability, low inertia, uncertainty, and various other factors. This research employs an MPC technique to enhance the power quality of a MG. To enhance the substantiation of the controller's performance, the subsequent piece additionally presents a fast Fourier transform (FFT) analysis of total harmonic distortion (THD). The research is conducted using the Simscape Electrical module within the MATLAB Simulink environment.
MGs possess the capacity to integrate a diverse range of DG technologies, encompassing photovoltaic (PV) sources, microturbines, diesel generators, battery storage, fuel cells, power equipment, and sustainable power sources. The implementation of MGs has promise in mitigating power outages, hence enhancing the efficiency, resilience, and reliability of power distribution [4]. The efficiency and stability of distribution systems are adversely affected by the duration and frequency of power outages. MGs can operate in two distinct modes: grid-connected and islanded. The grid-connected mode enables the MGs to maintain its power consumption by relying on the external grid. The islanded mode enables the MG to operate autonomously when the external grid experiences disturbances, such as voltage variations or frequency aberrations. This study employed a grid-connected AC MGs including four DGs that were interconnected with the primary grid via multiple bus terminals and MG network topologies as illustrated in Figure 3. In order to keep healthy distribution we need to diagnostics and fault-tolerant control to mitigate the disturbances.
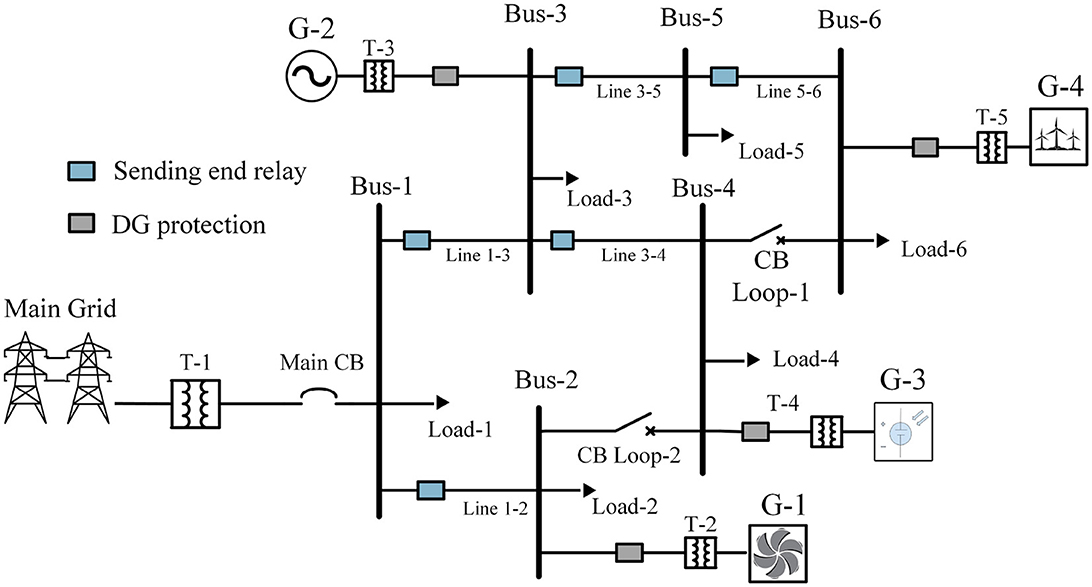
Figure 3. Grid-connected microgrid with four distributed generators. DG, distributed generation.
MG power distribution might be disrupted by many occurances which are considered as system faults that cause fluctuation of power, frequency instability, and more. These faults can be of various types as illustrated in Figure 4. Our model description is illustrated in the following section. PV sources are the most common and feasible distributed generation of MG applications because of their power generation is done by using irradiance which is considered as one of the cleanest renewable energies among all existing renewable sources (Busaidi et al., 2016). In our model, we have included two PV sources, both of which feature the type of module known as Suntech STP270-24-Vb. The model parameters for the PV sources are shown in Table 1. The usage of PV sources is increasing to power an increasing number of MGs all over the world, which necessitates the need for high-efficiency control to operate as a distributed generation unit for a MG.
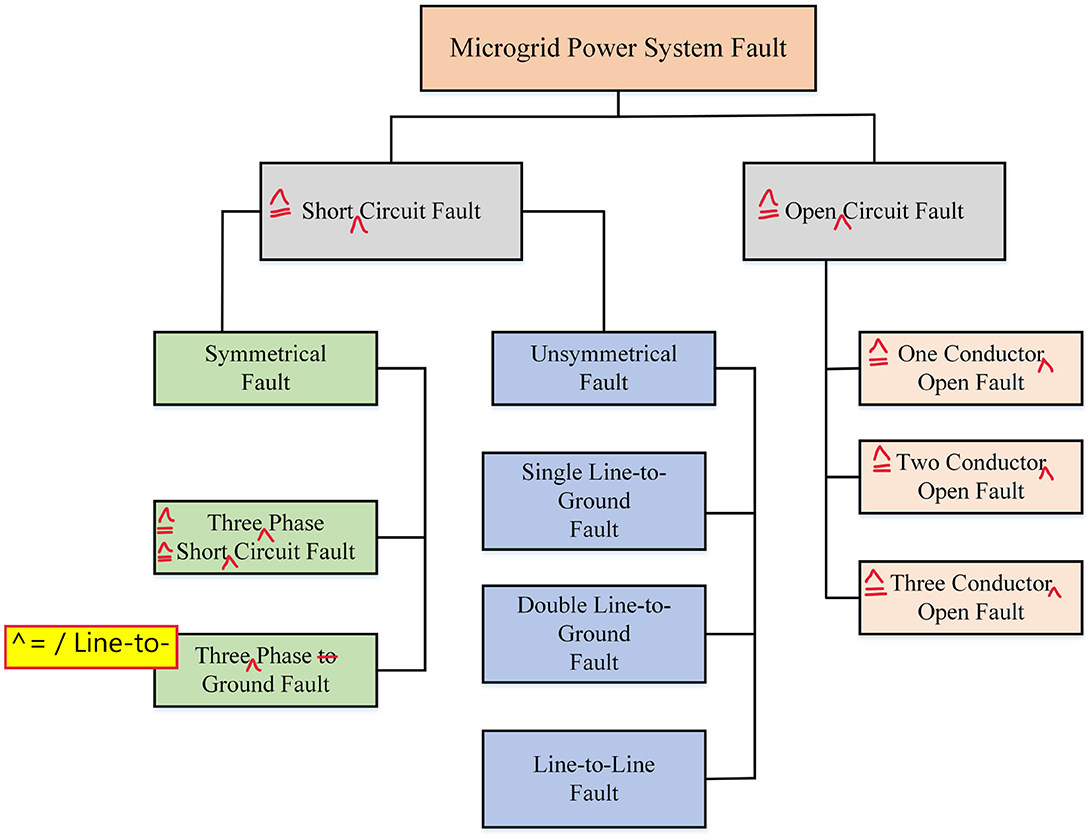
Figure 4. Different types of fault encountered by microgrid system.
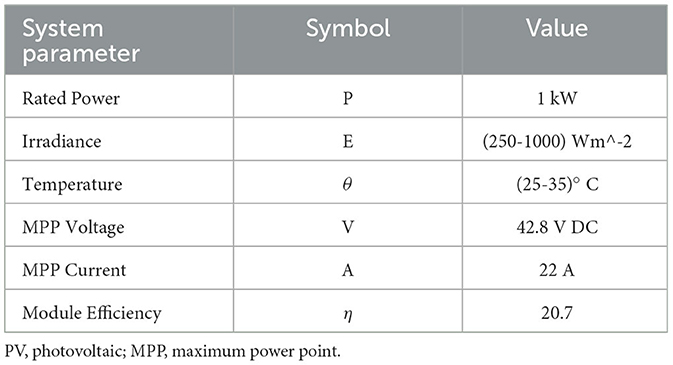
Table 1. System parameter of PV source.
The inverter is a crucial component of every PV system, regardless of whether or not it is connected to the power grid. The PV process in its entirety will continue to function normally up until the point that it completely ceases doing its job. PV sources produce DC power, which needs to be converted into AC before being connected to the main grid. The PV inverter plays a very essential role in the AC MG because of this requirement. PV inverters are available with a wide range of topologies, voltage and power ranges, and price points. These inverters can be used with individual panels, in residential or commercial settings, or even at the grid level. PV systems are crucial to reducing expenses and raising efficiency levels, despite the fact that they have certain goals and characteristics in common with one another. In our simulation, we made use of a three-phase, two-level inverter that was composed of six insulated-gate bipolar transistor (IGBT) switches. Each pair of switches was responsible for the phase conversion of one of the system's phases, illustrated in Figure 5, which shows the Simulink environment view of the PV inverter.
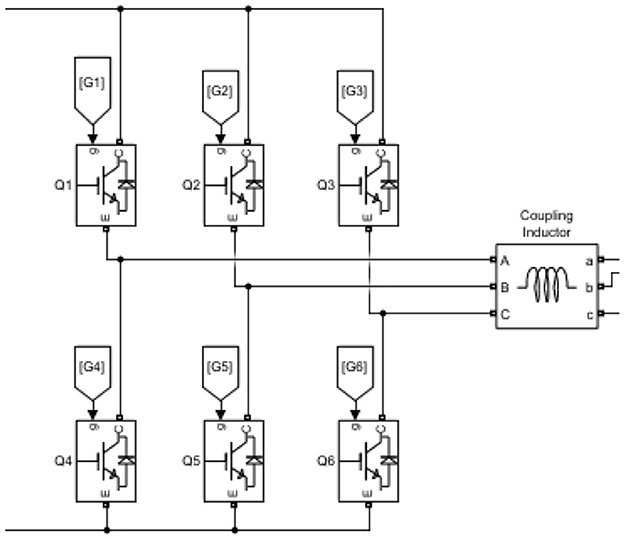
Figure 5. Three-phase, two-level photovoltaic inverter.
The method of generating wind electricity involves the utilization of wind turbines to convert the kinetic energy of wind into electrical energy. Wind power technology, despite its historical existence, has experienced a surge in popularity as a viable form of sustainable energy in recent times. A diverse range of wind turbine designs, encompassing both horizontal-axis and vertical-axis configurations, exist. Horizontal-axis turbines, characterized by their blades rotating around a horizontal axis, are widely recognized as the most prevalent type of turbine. Conversely, the blades of a vertical-axis turbine rotate in a circular motion around the central axis. The power coefficient of a wind turbine is a metric used to assess its efficiency by comparing its actual power output to the theoretical maximum power output that might be achieved if it were able to fully capture all the wind energy passing through its rotor. The power coefficients seen in modern wind turbines are roughly 0.45. Due to its characteristics as a renewable, clean, socially acceptable, economically viable, and ecologically beneficial energy source, wind is seen as a desirable energy resource; according to the International Energy Agency, the forecast is for increased use of wind power, with at least 18% of all energy produced globally by 2050. In this present energy transition that many nations across the world are pursuing, the most competitive alternative energy source by lowering the level of greenhouse gas emissions for mitigating global warming, wind power also plays a significant role (VAR, 2019). The ability to diversify a nation's energy mix is another benefit of wind power generation. Unlike PV sources, wind power has been considered a feasible source of renewable energy, more likely after the invention of a blade-less wind turbine that can be installed like a pier without the need for many places of installation (FRA, 2021). The efficiency of wind turbines has also been cherished in a remarkable position among existing hydropower energy sources. The system parameters of our wind turbine are given in Table 2.
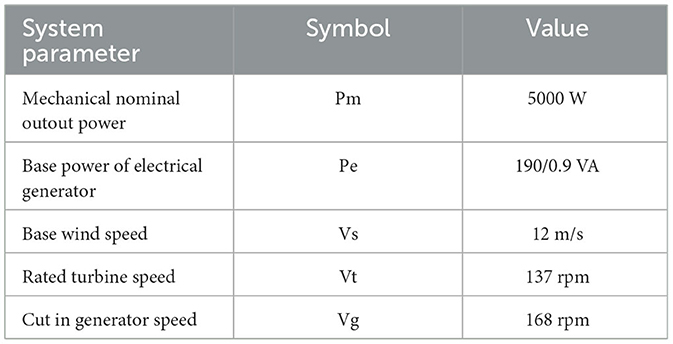
Table 2. System parameter of wind power source.
In addition to solar and wind energy sources, MG applications incorporate various types of DGs. Due to the requirement of specific environmental conditions for the establishment of hydropower, wave energy, and other RESs, their applicability is limited to certain locations. Some examples of energy generation methods include piezoelectric generation, wave energy generation, and fossil fuel–based generation facilities. Fuel-based generators are commonly employed in MG applications, making them one of the most prevalent types of generators utilized (Abu-Elzait and Parkin, 2019).
Our model incorporates supplementary kinds of distributed generation, alongside non-conventional energy sources such as wind energy and solar sources. As seen in Figure 1, the establishment of connections at the central point of the system is crucial for ensuring reliable power distribution to the users. The fundamental principle of grid-connected MGs involves establishing a self-sufficient network by utilizing small-scale distributed energy resources that are interconnected with the main power grid. Consequently, in the event of any complications with the primary power distribution system, local consumers can nevertheless maintain a consistent provision of electrical energy. Given its minimal energy usage, there is no imperative for it to own an independent generation system. It is more advantageous to establish a connection with a MG system, as it allows the current DGs to generate the required electricity in an efficient manner while also mitigating the potential risks associated with overload or frequency disruptions. The primary responsibility of the controller in this position is to ensure smooth and uninterrupted electricity distribution within the MG system by effectively addressing and rectifying any operational disruptions or malfunctions. The droop control mechanism has been extensively employed thus far; nonetheless, it is associated with several notable limitations. These include suboptimal transient performance, neglect of load dynamics, incompatibility with non-linear loads due to harmonics and partial interdependence of actual and reactive power. The utilization of an MPC approach can provide to mitigate the aforementioned constraints.
The MPC strategy provides a straightforward approach for optimizing the control of systems while taking into account various restrictions. As a result, MPC has gained significant recognition and acceptance within the industry as one of the most advanced control strategies available. MPC encompasses a diverse set of control approaches that leverage system models to establish the optimal control strategy. This is achieved by minimizing a cost function. The basic architecture of MPC is illustrated in Figure 6. The MPC concept is focused on selecting the best across all potential input sequences over a time horizon, based on specified criteria. The first input in this sequence is applied to the concept of a receding horizon, so at subsequent sampling periods, the system and the strategy are repeated as new state information is approachable. MPC resolves a restricted dynamic optimum control issue in this manner by repeatedly optimizing the open-loop issue online rather than offline calculation, which is difficult (Yaramasu et al., 2013). MPC enables systems to function closer to their limitations by handling real-time state and input restrictions in a natural way. A finite horizon optimal control problem is subject to system dynamics, state, and input restrictions, and MPC involves the solution at each sampling moment. The construction of hierarchical multilayer systems with several control algorithms operating at various timescales and multivariable control issues are both suitable applications for the MPC technique. MPC is particularly effective because of its stochastic formulation, which enables the controller to simultaneously optimize a variety of scenario situations.
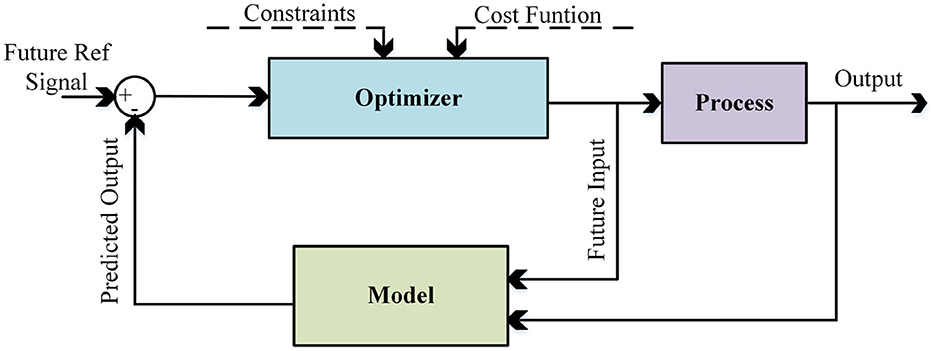
Figure 6. Basic architecture of model predictive control.
MPC's inherent closed-loop design depends on system responsiveness in order to quickly remedy problems. The crucial aspect of feedback is introduced by using measurements to update the optimization issue for the following time step. Predicted parameters are being calculated considering the parameter of the AC MG in a healthy state.
MPC is a control strategy that uses a mathematical model of the system being controlled to predict its future behavior and optimize control actions to achieve a desired goal. MPC uses a model of the system dynamics, constraints, and cost function to optimize a control strategy over a finite prediction horizon. In MG operations, storage is very essential part and the dynamic model of MG is developed as state space equations where f(t) corresponds to the energy storage with the state of charge. Equation 1 is used to acquire the system dynamics in linear cases:
The state vectors are f(t), g(t), and e(t) which are scaler in Single Input single-input single-output (SISO) operations; however, in multi-input multi-output operations, the input vectors e(t) and g(t) refer to the dimensions of m and n, respectively. In our control operation of MG, the output g(t) equates using f(t); consequently, the operation is MIMO, and the identity refers to matrix R.
Substantially, the equation of objective function for SISO operation is
where g is the predicted output, Up is the prediction horizon, and Uc is the control horizon. It is possible to incorporate a further period that penalizes the control signal rather than its increment. The control horizon, Uc Up, is not required to have the same value as the prediction horizon, Up. The maximum amount of time that the output should follow the reference is determined by the parameter Up. The control horizon idea (Uc) entails taking into account that the suggested control signals will be maintained constant after an interval Uc is less than Up, that is, e(t+j) does not change after j = Uc: Since the inputs and outputs are vectors, quadratic functions are used to calculate the costs in MIMO operations. The equation for MIMO operations is
where L and I are matrices of positive definite weight. Due to MPC's predictive nature, the controller can respond before the modification has actually been implemented if the evolution of reference 1(t+k) is known as a priory. This occurs in a variety of situations; for instance, an upper-level scheduling function may compute the amount of electricity to be traded with the grid. Even if the reference is constant, performance may be improved by merely anticipating the moment when the value will change and acting accordingly. Typically, a reference trajectory w(t+k) is employed, which is a first-order filter-based smooth approximation from the current output value to the known reference value l(t+k). Consequently, the prediction is given by
This equation can be written in vector following form:
Solving the preceding equations, the controller will give an optimized output (Camacho and Bordons, 2007), which can be shown by the final predictive equation
The control rule is always a static state feedback law for both classes of models, whether they are incremental or not. Consequently, the MPC controller mitigate the disturbance from the system and helps carry on the smooth opearation run by the system with nominal power rating. There are also other algortihtm of for controlling MPC like generalized predictive control, dynamic matrix control, and others.
The following works have been done using a MATLAB Simulink environment with Simscape Electrical blocks. In Figure 7, the primary component of the model has been offered to facilitate a comprehensive knowledge of the actual model of our AC MG. The model comprises two PV sources with a power rating of 1 kW each, a wind power source, and additional DG. The MPC controller is located within a subsystem referred to as the controller unit. To assess the effectiveness of the suggested SISO controller, it is recommended to refer to Supplementary Figure 1. A control block diagram is presented to illustrate the ability of the intrinsic MG system to maintain operational consistency. The generation of novel modifications of these parameters results in the emergence of fresh trajectories for the Simulink environment to monitor. The process can be divided into three clearly defined phases: The first phase involves the establishment of pertinent system parameters and control strategies; the second phase encompasses the acquisition of parameter knowledge, including the previously mentioned prediction and control horizon; and the third phase focuses on the output, specifically evaluating performance in terms of rise, settling, overshoot, and peak times. The subsequent discourse elaborates on the results, which substantiate the soundness of the suggested model.
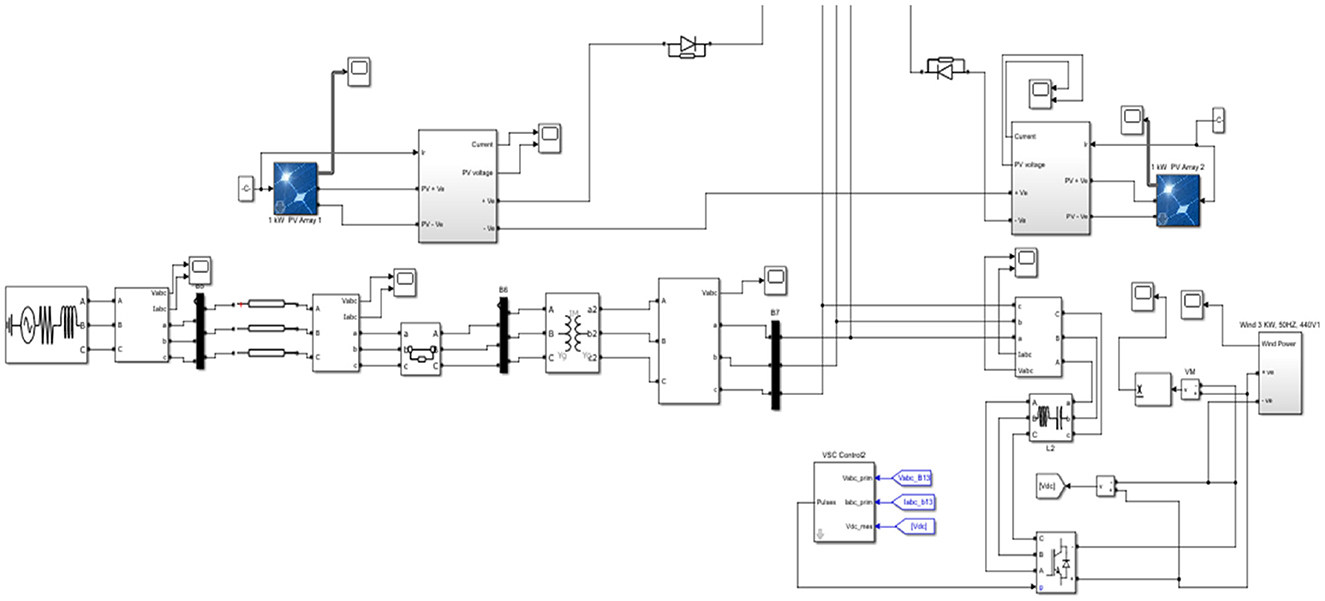
Figure 7. MATLAB Simulink model of microgrid system.
To validate the MPC-based distribution control approach the simulation illustration and THD calculation using FFT analysis has been done, which is a measure of the level of distortion present in a signal. It is a ratio of the root mean square (RMS) value of the harmonic components of a signal to the RMS value of the fundamental frequency of the same signal. According to the IEEE 519, constitution maximum permissible THD is 5%; the lower the THD, the more efficient output will be provided by the system. The THD index is the most common performance metric used as a parameter for a controller. The provided power of relevant systems is frequently distorted due to a variety of causes. THD is the ratio of the signal's distorted power to its overall power. The following figures illustrate the controlled voltage (Figure 8) and current waveform (Figure 9) after the MPC strategy has been imposed on the MG system. A comparison of controlled and uncontrolled current output graph is also presented in Figure 10. For better clarification of the controller and feasibility, we also compare the normal condition power rating and faulty condition power rating. For DG-1, DG-2, DG-3, DG-4, power comparison are illustrated in Figures 11–14, respectively.
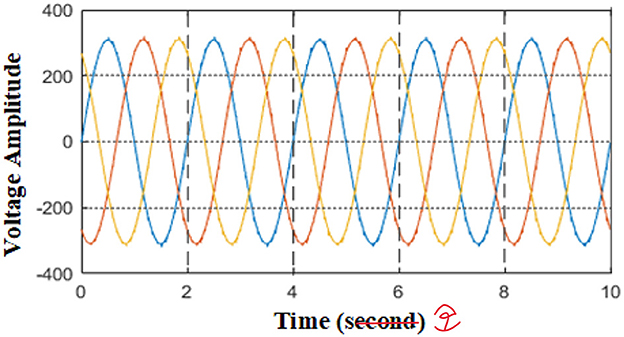
Figure 8. Output voltage graph of the microgrid system.
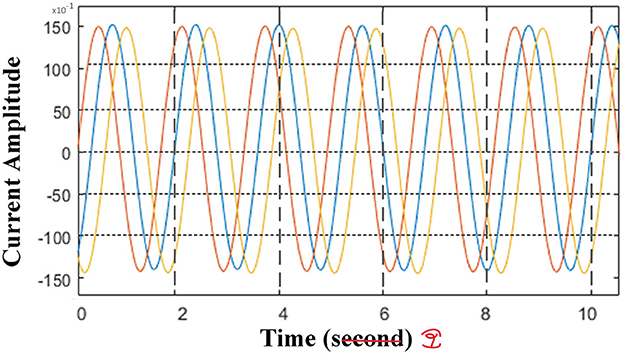
Figure 9. Output current graph of the microgrid system.
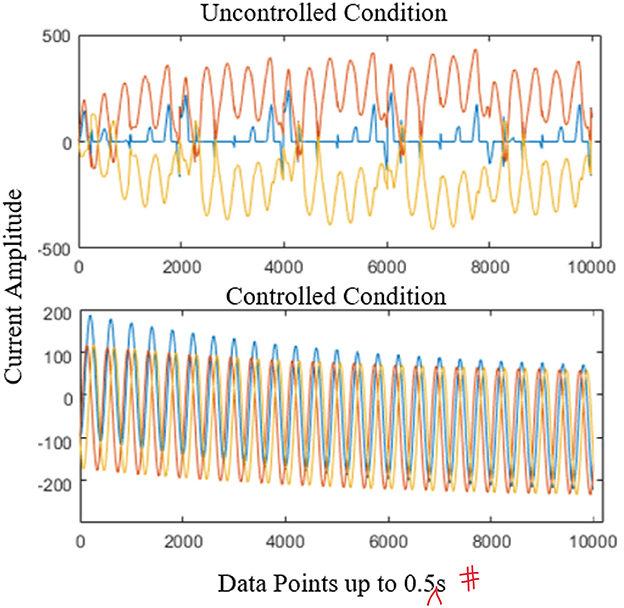
Figure 10. Output current graph of the microgrid system (controlled and uncontrolled).
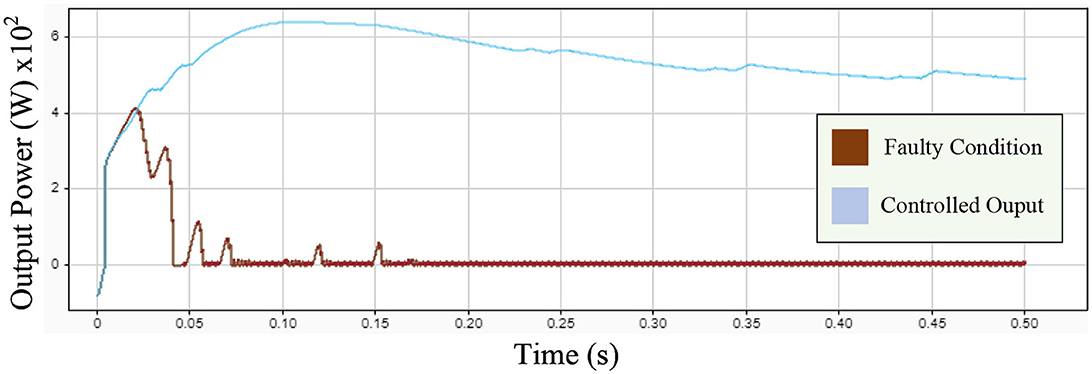
Figure 11. Output power graph of DG-1.
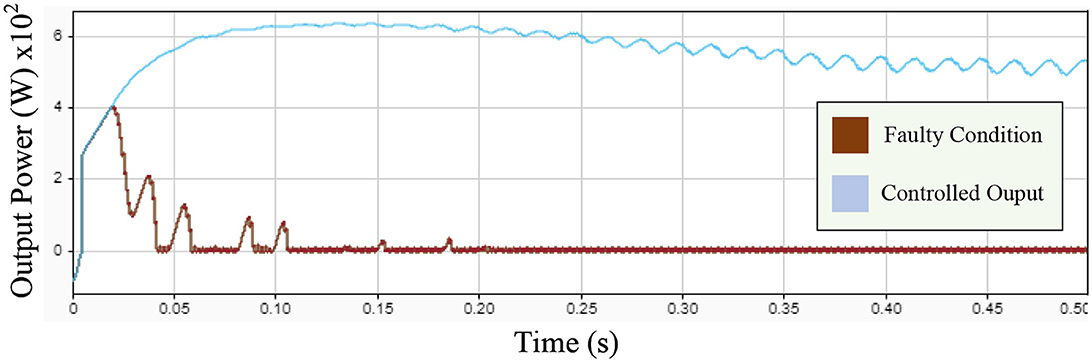
Figure 12. Output power graph of DG-2.
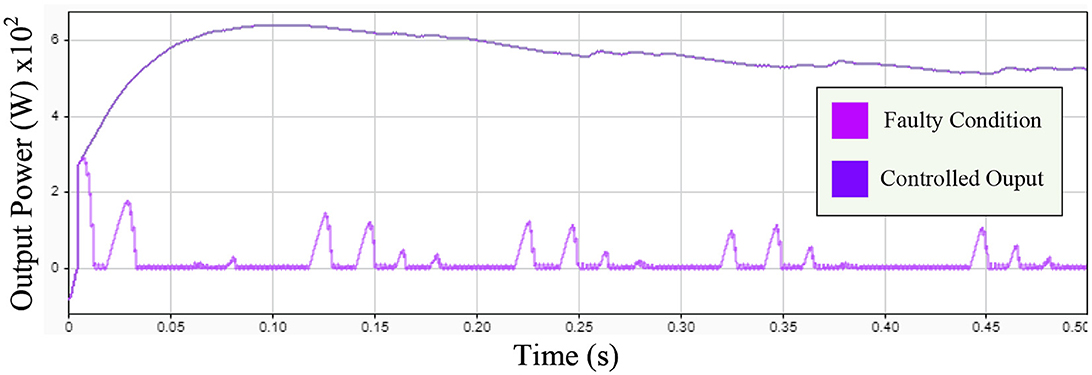
Figure 13. Output power graph of DG-3.

Figure 14. Output power graph of DG-4.
From the THD calculation by FFT analysis, we have calculated for our four DGs and the overall THD of our MG system. The overall mean THD we got 0.20%, which shows an optimal performance index for our controller to control the power distribution of the MG. Table 3 and Figures 15, 16 represent the THD calculation performed using MATLAB Simulink to analyze the FFT.

Table 3. Calculated value of THD for different DGs.
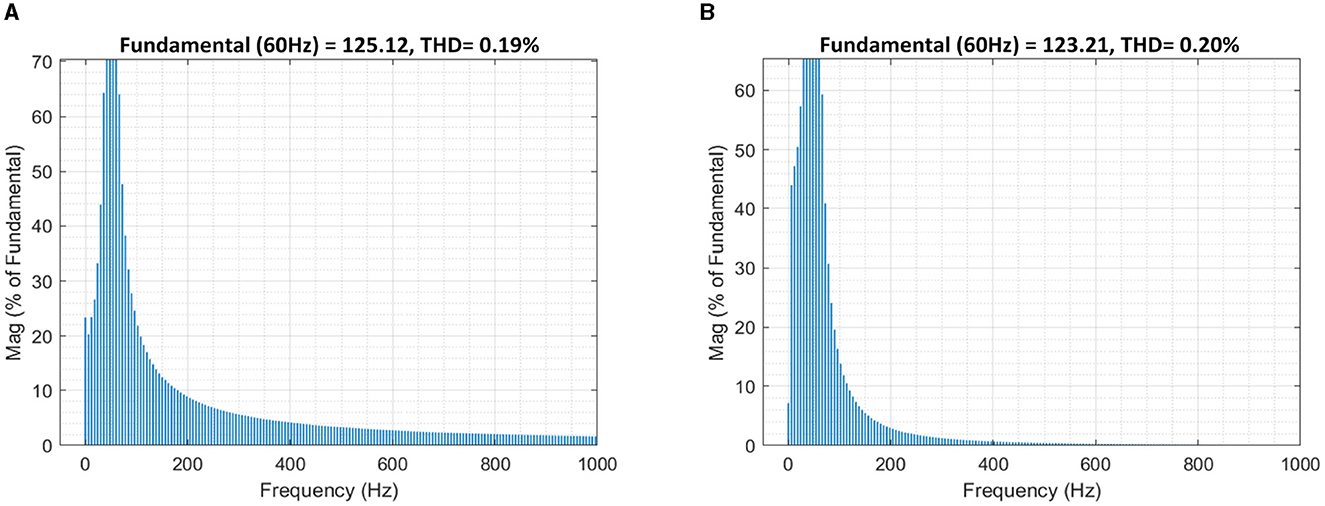
Figure 15. The total harmonic distortion calculation of DG-1 (A) and DG-2 (B).
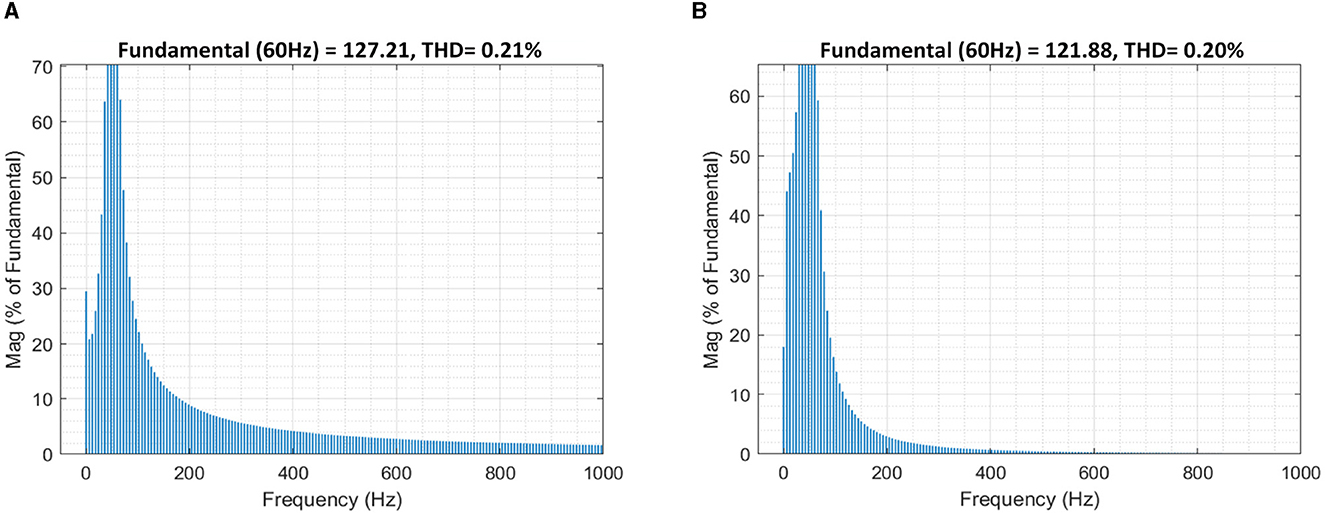
Figure 16. The total harmonic distortion calculation of DG-3 (A) and DG-4 (B).
A comparison between the proposed work and other existing works is illustrated in Table 4, which also shows a satisfactory point of view of our work. The performance of a controller can be measured by several parameters such as rise time, settling time, peak time, and overshoot. Rise time is a measure of how quickly a response changes and is calculated as the time taken for the response to change from 10% to 90% of its final value. Settling time, by comparison, measures how long it takes for the response to settle within a specified error tolerance, usually 2% or 5% of the final value. Peak time is the time at which the response reaches its maximum value. Overshoot is an important parameter that measures the amount by which the response exceeds its final value, expressed as a percentage of the final value. These parameters are crucial in determining the stability and accuracy of a control system. In Table 5, the performance parameter of the controller is illustrated by the rise time, peak time, settling time, and overshoot of the controller.
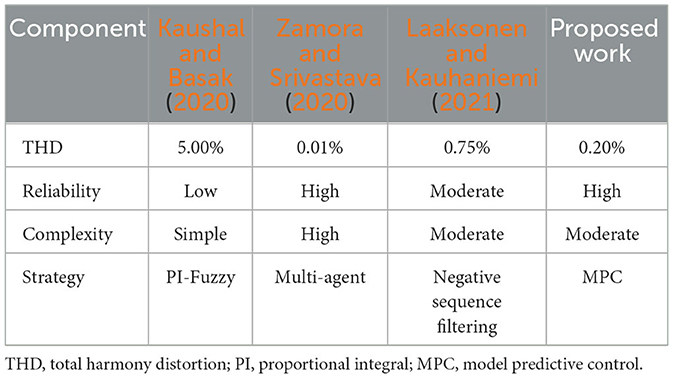
Table 4. Comparison with other model.
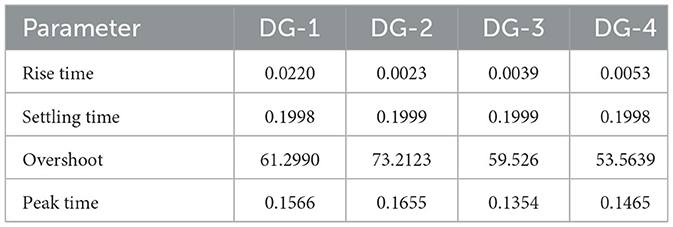
Table 5. Various performance parameters of the controller.
This study proposes an MPC-based paradigm for power distribution control of a grid-connected AC MG system. The simulation result performed using MATLAB Simulink environment has been illustrated with optimum voltage and current output waveforms and a satisfactory value of THD, which has been considered to be a validation parameter of any controller of a system having an inverter, which is the obvious element for AC MG. In order to expand the future of power distribution control of AC MG can be done using artificial intelligence with an optimized machine learning algorithm that will be able to control the system more precisely in cases of fatigue failures. A reinforcement learning algorithm may be introduced with such a system, which will be more adaptive and reliable for uncertain fault conditions. However, the proposed method is adequate enough for optimal power distribution control under the mentioned conditions with a higher efficiency of the system.
The original contributions presented in the study are included in the article/Supplementary material, further inquiries can be directed to the corresponding author.
The author confirms being the sole contributor of this work and has approved it for publication.
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frsgr.2023.1188074/full#supplementary-material
Abu-Elzait, S., and Parkin, R. (2019). “Economic and environmental advantages of renewable-based microgrids over conventional microgrids,” in 2019 IEEE Green Technologies Conference(GreenTech). Lafayette, LA: IEEE, 1–4.
Aziz, T., Salman, S., Islam, M. S., Razzaq, A., Chowdhury, R. A., and Mitun, M. I. H. (2015). “Integration of wind energy system in microgrid considering static and dynamic issues,” in 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT). Savar: IEEE, 1-5.
Bhuiyan, E. A., Akhand, M. A., Fahim, S. R., Sarker, S. K., and Das, S. K. (2022). A deep learning through dbn enabled transmission line fault transient classification framework for multimachine microgrid systems. Int. Trans. Electrical Energy Syst. 2022, 6820319. doi: 10.1155/2022/6820319
Busaidi, A. S. A., Kazem, H. A., Al-Badi, A. H., and Khan, M. F. (2016). A review of optimum sizing of hybrid pvwind renewable energy systems in oman. Renewable Sust. Energy Rev. 53, 185–193. doi: 10.1016/j.rser.2015.08.039
Camacho, E. F., and Bordons, C. (2007). Introduction to Model Predictive Control. London: Springer London, 1–11.
Cortés, P., Kazmierkowski, M. P., Kennel, R. M., Quevedo, D. E., and Rodríguez, J. (2008). Predictive control in power electronics and drives. IEEE Trans. Indust. Elect. 55, 4312–4324. doi: 10.1109/TIE.2008.2007480
Cortés, P., Ortiz, G., Yuz, J. I., Rodríguez, J., Vazquez, S., and Franquelo, L. G. (2009). Model predictive control of an inverter with output lc filter for ups applications. IEEE Trans. Indust. Elect. 56, 1875–1883. doi: 10.1109/TIE.2009.2015750
Datta, D., Fahim, S. R., Sarker, S. K., Muyeen, S. M., Sheikh, M. R. I., and Das, S. K. (2020). A robust control method for damping and tracking of secondary network voltage of a pv based hybrid ac/dc microgrid. Front. Energy Res. 8, 580840. doi: 10.3389/fenrg.2020.580840
Fransis, S., Umesh, V., and Shivakuma, S. (2021). Design and analysis of vortex bladeless wind turbine. Materials Today: Proce. 47, 5584–5588. doi: 10.1016/j.matpr.2021.03.469
Guerrero, J. M., Vasquez, J. C., Matas, J., Castilla, M., and Garcia de Vicuna, L. (2009). Control strategy for flexible microgrid based on parallel line-interactive ups systems. IEEE Trans. Indust. Electron. 56, 726–736. doi: 10.1109/TIE.2008.2009274
Han, Y., and Zhang, D. (2011). Fault analysis of microgrid composed by inverter-based distributed generations. Power System Technol. 35, 147–152.
Jayawardena, A., Meegahapola, L., Perera, S., and Robinson, D. (2012). “Dynamic characteristics of a hybrid microgrid with inverter and non-inverter interfaced renewable energy sources: a case study,” in 2012 IEEE International Conference on Power System Technology (POWERCON) Auckland: IEEE, 1–6.
John, T., Wang, Y., Tan, K. T., and So, P. L. (2015). “Coordinated operation of a microgrid with a distribution network device,” in 2015 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA). Bangkok: IEEE, 1–6.
Kaushal, J., and Basak, P. (2020). Power quality control based on voltage sag/swell, unbalancing, frequency, thd and power factor using artificial neural network in pv integrated ac microgrid. Sust. Energy, Grids Netw. 23, 100365. doi: 10.1016/j.segan.2020.100365
Kim, S.-K., Jeon, J.-H., Cho, C.-H., Kim, E.-S., and Ahn, J.-B. (2009). Modeling and simulation of a grid-connected pv generation system for electromagnetic transient analysis. Solar Energy, 83, 664–678. doi: 10.1016/j.solener.2008.10.020
Laaksonen, H., and Kauhaniemi, K. (2021). “Voltage and current thd in microgrid with different dg unit and load configurations,” in CIRED 2009 - 20th International Conference and Exhibition on Electricity Distribution- Part 1. Frankfurt: IEEE, 1–4.
Liu, S., Wang, X., and Liu, P. X. (2015). Impact of communication delays on secondary frequency control in an islanded microgrid. IEEE Trans. Indust. Elec. 62, 2021–2031. doi: 10.1109/TIE.2014.2367456
Micallef, A., Apap, M., Spiteri-Staines, C., Guerrero, J. M., and Vasquez, J. C. (2014). Reactive power sharing and voltage harmonic distortion compensation of droop controlled single phase islanded microgrids. IEEE Trans. Smart Grid 5, 1149–1158. doi: 10.1109/TSG.2013.2291912
Mohiuddin, S. M., and Qi, J. (2020). “Droop-free distributed control for ac microgrids with precisely regulated voltage variance and admissible voltage profile guarantees,” in 2020 IEEE Power And Energy Society General Meeting (PESGM), 11. doi: 10.1109/TSG.2019.2945691
Olivares, D. E., Mehrizi-Sani, A., Etemadi, A. H., Caizares, C. A., Iravani, R., Kazerani, M., et al. (2014). Trends in microgrid control. IEEE Trans. Smart Grid 5, 1905–1919. doi: 10.1109/TSG.2013.2295514
Ouari, K., Belkhier, Y., Djouadi, H., Kasri, A., Bajaj, M., Alsharef, M., et al. (2022). Improved nonlinear generalized model predictive control for robustness and power enhancement of a dfig-based wind energy converter. Front. Energy Res. 10. doi: 10.3389/fenrg.2022.996206
Rodriguez, F., Florez-Tapia, A. M., Fontn, L., and Galarza, A. (2020). Very short-term wind power density forecasting through artificial neural networks for microgrid control. Renew. Energy 145, 1517–1527. doi: 10.1016/j.renene.2019.07.067
Sarker, S. K., Fahim, S. R., Datta, D., Muyeen, S. M., Badal, F. R., Das, S. K., et al. (2022a). A two-level hybrid control strategy to augment transient stability and tracking accuracy of hybrid microgrid coupled with industrial loads. IET Renew. Power Gener. 17, 2869–2886. doi: 10.1049/rpg2.12562
Sarker, S. K., Fahim, S. R., Sarker, N. C., Tayef, K. Z., Siddique, A. B., Datta, D., et al. (2021). Ancillary voltage control design for adaptive tracking performance of microgrid coupled with industrial loads. IEEE Access 9, 1436904–143706. doi: 10.1109/ACCESS.2021.3121548
Sarker, S. K., Uddin, M. S., Tania, M. T., Das, S. K., Ishraque, M. F., and Shezan, S. A. (2022b). A new decentralized two-stage multi-objective control of secondary network driven hybrid microgrid under variable generation and load conditions. Energy Rep. 8, 14154–14169. doi: 10.1016/j.egyr.2022.10.304
Vargas, S. A., Esteves, G. R. T., Maaira, P. M., Bastos, B. Q., Oliveira, F., and Souza, R. (2019). Wind power generation: a review and a research agenda. J. Cleaner Prod. 218, 850–870. doi: 10.1016/j.jclepro.2019.02.015
Wang, Z., Wu, W., and Zhang, B. (2018). A distributed quasi-newton method for droop-free primary frequency control in autonomous microgrids. IEEE Trans. Smart Grid 9, 2214–2223. doi: 10.1109/TSG.2016.2609422
Xyngi, I., Ishchenko, A., Popov, M., and van der Sluis, L. (2009). Transient stability analysis of a distribution network with distributed generators. IEEE Trans. Power Syst. 24, 1102–1104. doi: 10.1109/TPWRS.2008.2012280
Yaramasu, V., Rivera, M., Wu, B., and Rodriguez, J. (2013). Model predictive current control of two-level four-leg inverters part i: Concept, algorithm, and simulation analysis. IEEE Trans. Power Elect. 28, 3459–3468. doi: 10.1109/TPEL.2012.2227509
Keywords: AC microgrid, fault in power distribution, PV sources, wind power, model predictive control, FFT analysis, THD calculation
Citation: Halivor JX (2023) Model predictive control–based robust-control strategy of distribution control for a grid-connected AC microgrid. Front. Smart Grids 2:1188074. doi: 10.3389/frsgr.2023.1188074
Received: 16 March 2023; Accepted: 17 November 2023;
Published: 11 December 2023.
Edited by:
Tao Chen, Southeast University, ChinaReviewed by:
Subrata K. Sarker, Rajshahi University of Engineering & Technology, BangladeshCopyright © 2023 Halivor. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: James Xorse Halivor, jayjunior72@ymail.com
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.