 U. K. Singh
U. K. Singh A. K. Singh
A. K. Singh V. Bhatia
V. Bhatia A. K. Mishra
A. K. Mishra- 1Interdisciplinary Centre for Security, Reliability and Trust (SnT), University of Luxembourg, Luxembourg, Luxembourg
- 2Discipline of Electrical Engineering, Indian Institute of Technology Indore, Indore, India
- 3Department of Electrical Engineering, University of Cape Town, Cape Town, South Africa
In radar, the measurements (like the range and radial velocity) are determined from the time delay and Doppler shift. Since the time delay and Doppler shift are estimated from the phase of the received echo, the concerned estimation problem is nonlinear. Consequently, the conventional estimator based on the fast Fourier transform (FFT) is prone to yield high estimation errors. Recently, nonlinear estimators based on kernel least mean square (KLMS) are introduced and found to outperform the conventional estimator. However, estimators based on KLMS are susceptible to incorrect choice of various system parameters. Thus, to mitigate the limitation of existing estimators, in this paper, two efficient low-complexity nonlinear estimators, namely, the extended Kalman filter (EKF) and the unscented Kalman filter (UKF), are proposed. The EKF is advantageous due to its implementation simplicity; however, it suffers from the poor representation of the nonlinear functions by the first-order linearization, whereas UKF outperforms the EKF and offers better stability due to exact consideration of the system nonlinearity. Simulation results reveal improved accuracy achieved by the proposed EKF- and UKF-based estimators.
1 Introduction
Radar systems are generally used in applications like target identification and tracking, air traffic control, and remote sensing (Richards, 2005). In radar systems, a signal burst is transmitted by the transmitter, and the receiver receives a scattered form of this signal in return. This scattering is quantified with time delay and Doppler shift in the received signal, which gives measures on the range and radial velocity of the target. The range and radial velocity of the target are used as measurements in radar applications (Richards et al., 2010). Thus, an appropriate estimation of time delay and Doppler shift is required for accurate tracking of the target trajectory. Some of the major developments in estimating these parameters are introduced in the literature by Abatzoglou and Gheen (1998), Li and Wu (1998), and Yang et al. (2011). Abatzoglou and Gheen (1998) introduced an approximate maximum likelihood estimator based on the fast Fourier transform (FFT) for estimating the desired time delay and Doppler shift. In the study by Li and Wu (1998), a nonconvex least square cost function was defined in terms of the desired parameters. Thereafter, the estimation problem reduces to the minimization of the cost function. In a later development, Yang et al. (2011) introduced a multiple signal classification technique commonly known as MUSIC and estimated the desired time delay and Doppler shift by solving the problem of spectral estimation.
The existing approaches introduced in the literature by Abatzoglou and Gheen (1998), Li and Wu (1998), and Yang et al. (2011) suffer from poor estimation accuracy, especially in low signal-to-noise ratio (SNR) conditions (often the case with practical radar systems). In the literature, this phenomenon has been termed as the SNR thresholding effect (Abatzoglou and Gheen; Rife and Boorstyn, 1974; Kay, 1993; Kay, 1998). The desired parameters to be estimated are contained in the phase of received echo. Consequently, the parameter estimation problem in a radar system is nonlinear (Richards, 2005; Richards et al., 2010). Therefore, as a recent solution for efficient estimation of time delay and Doppler shift, a kernel least mean square (KLMS)–based nonlinear estimator has been introduced by Singh et al. (2017) and Singh et al. (2019). The KLMS-based estimator uses representer theorem (Liu et al., 2011) to recursively estimate the nonlinearity (between the unknown parameters and returning signal) in a reproducing kernel Hilbert’s space (RKHS) (Liu et al., 2011, 2008). The estimated parameters are adaptively updated using the least mean square algorithm (Liu et al., 2011) in RKHS. However, a major drawback in the KLMS-based algorithm is that they require precise knowledge of various system parameters, like the kernel width, step size, and dictionary thresholds. Suitable values of these parameters are obtained by running their values in a fixed range. Moreover, these parameter values are model specific (Liu et al., 2008; Mitra and Bhatia, 2014;Mitra and Bhatia, 2017); hence, a priori fixed set of parameter values are not appropriate for targets with varying system dynamics (e.g., varying range and radial velocity) which is most common in practical problems. Consequently, the KLMS-based estimators offer poor estimation accuracy. Another drawback is that, being a stochastic gradient-based algorithm, the KLMS-based estimators require a large number of iterations to converge to a minimum error (between the desired and estimated parameters) solution (Liu et al., 2011).
This paper introduces two novel nonlinear estimation techniques to counter drawbacks of estimators in the literature and improve the estimation of time delay and Doppler shift. The proposed estimation techniques are based on two popular nonlinear estimators: the extended Kalman filter (EKF) (Bar-Shalom et al., 2004) and the unscented Kalman filter (UKF) (Julier et al., 2000; Julier and Uhlmann, 1997; Julier and Uhlman, 2004). To the best of the authors’ knowledge, the EKF and UKF have been tested for target tracking using radar-based measurements (Cortina et al., 1991; Farina et al., 2002; Kulikov and Kulikova, 2015). The other version of Kalman filter, modified convolution kernel function (MCKF) (Gu et al., 2019), has been used for parameter estimation of returning signal (model as linear frequency modulated (LFM) signal) in the specific application of synthetic aperture radar. However, the EKF and UKF have not been explored for estimating the time delay and Doppler shift for target tracking. The EKF implements a basic Kalman filter (Bar-Shalom et al., 2004) and offers a simple implementation. However, it approximates the nonlinear system as a linear model obtained by the first-order linearization. Subsequently, it suffers from poor accuracy and stability, especially in a complex environment such as low SNR and heavy-tailed clutter. Poor accuracy in estimating the target’s states causes ambiguity in target identification. Unlike EKF, UKF considers the system models in their original nonlinear form, which is beneficial in accurate estimation of a target’s parameters in a complex environment. Accuracy of the proposed estimation techniques based on EKF and UKF is compared with the existing KLMS-based estimator (called KLMS-Modified NC) and conventional estimator based on FFT. Simulation results reveal a lower normalized mean square error (NMSE) and variance for the proposed estimators.
The main purpose for which radars are commonly used is detection and tracking. Usually, in a radar system, the tracking is followed by the detection and estimation of parameters such as range, radial velocity, and angle. The estimated range, radial velocity, and angle are used as measurements for the tracker. In the proposed work, we are estimating the target range (time delay) and radial velocity (Doppler shift) at the signal level before detection. Therefore, the estimated parameters can be supplied directly to the tracker for tracking; in the literature, this technique is notably known as track before detection (TBD) (Buzzi et al., 2008; Kwon et al., 2019). Consequently, as TBD finds application in stressful environments (heavily perturbed by clutter) like marine, vehicles in traffic, and ground with complex terrains, with the assumption of known angle information, our proposed estimation approach provides improved measurements for tracker in such applications.
The rest of the paper is organized as follows: Section 2 describes the signal model for received radar return for the transmitted LFM signal. The proposed EKF- and UKF-based estimators are described in Section 3. Simulation results along with analytical expressions for CRLB on the variance in estimating time delay and Doppler shift are discussed in Section 4. Finally, Section 5 concludes the contribution of this work.
Notations. Scalar variables (constants) are denoted by lower (upper) case letters. Vectors (matrices) are denoted by boldface lower (upper) case letters. Superscripts
2 Signal Model Formulation
In this section, we derive the radar return signal model, which describes the relationship between the radar return and the desired unknown parameters, namely, the time delay and the Doppler shift. We choose the most commonly used radar system called the monostatic LFM radar (Levanon and Mozeson, 2004; Richards et al., 2010) with an assumption that the platform holding a radar system is static. Block diagram of the considered monostatic radar is presented in Figure 1. As shown in Figure 1, the radar transmitter generates a burst of LFM pulses at a baseband frequency (a sample baseband LFM signal is shown in Figure 2), where LFM pulses are separated by a fixed duration called pulse repetition interval (PRI). For transmission, the pulse burst is modulated with high-frequency carrier signal, resulting in a broadband LFM signal (a sample broadband LFM signal is presented in Figure 3). The on-board receiver captures a scattered form of transmitted signal returning from the target. Subsequently, the received signal is degenerated to a scattered form of the originally transmitted signal. Scattering is introduced due to two factors: i) time delay due to to-and-from propagation of signal between the antenna and the target and ii) Doppler shift introduced due to target’s radial velocity. A sample scattered signal is shown in Figure 41.
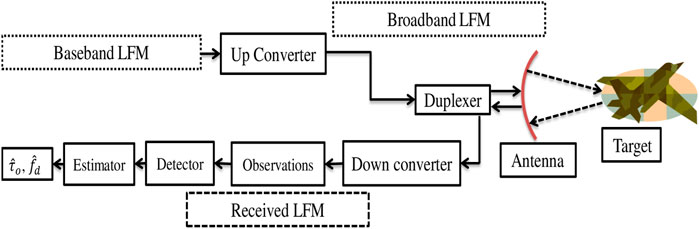
FIGURE 1. Block diagram of the radar system model, depicting the transmission of signal and processing of scattered signal to estimate the target’s unknown parameters: time delay and Doppler shift.
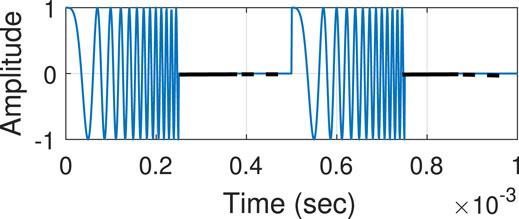
FIGURE 2. Baseband LFM at low frequency.
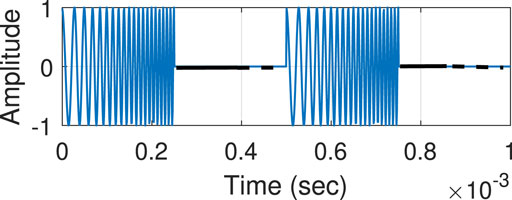
FIGURE 3. Broadband LFM at carrier frequency.
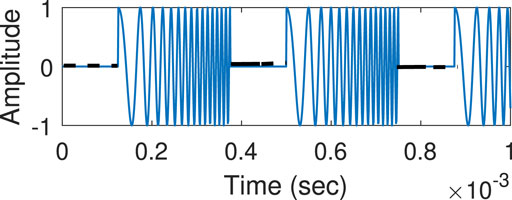
FIGURE 4. Received LFM signal (time-delayed and Doppler-shifted version of baseband LFM).
The LFM baseband signal is denoted by
where a is the amplitude, γ is the frequency sweep rate,
The
where
As discussed earlier,
where
The returning signal
where
where
The returning signal,
Substituting
The matched filter output is given by
Next, taking the Fourier transform yields
Thus,
Here,
Sampling in the frequency domain at
where
Substituting
where
From Eq. 9, it is explicit that the returning signal,
3 Estimation of Time Delay and Doppler Shift
In this section, the proposed EKF- and UKF-based estimators for
3.1 State-Space Model for Radar Systems
The state-space model consists of state and measurement models, where the state model characterizes the state dynamics while the measurement model represents the mathematical relation between the state and measurement. Note that the state is defined with the unknown desired parameters (
where
Following Eq. 9, the measurement model
where
3.2 Bayesian Framework for Filtering
The Bayesian filtering is performed in two steps.
3.2.1 Prediction
This step constructs the probability distribution function (pdf) of states one step forward in time (in reference to the available measurements) using the Chapman–Kolmogorov equation (Bar-Shalom et al., 2004; Anderson and Moore, 2012), i.e.,
where
3.2.2 Update
This step reconstructs the pdf
where
The objective of Bayesian filtering is to construct
Hereafter, we denote
3.3 EKF-Based Estimation of
From the state-space model of the considered radar systems (Eqs. 10, 11), the estimation of
where
3.3.1 Prediction
In this step, the prior pdf parameters, i.e.,
Refer to the work of Bar-Shalom et al. (2004), Anderson and Moore (2012), and Brown and Hwang (1992) for a detailed discussion on the computational aspects of
3.3.2 Update
In the update step, firstly, the predicted measurement
where
Finally, on the receipt of a new measurement
The posterior estimate
Algorithm 1Estimation of time delay and Doppler shift using EKF
1: Input:
2: Output:
3: Initialization:
4: while
5: Compute Jacobian of
6: Compute the prediction parameters
7: Compute the Jacobian of
8: Compute the update parameters
9: Return
10: end while
3.4 UKF-Based Estimation of
The UKF (Julier et al., 2000; Julier and Uhlmann, 1997, 2004) uses a derivative-free implementation for estimating
The computational aspects of prediction and update steps for the UKF are as follows.
3.4.1 Prediction
The predicted estimate and covariance,
3.4.2 Update
The computation of updated estimate and covariance,
• Measurement estimate
• Measurement error covariance
• The cross-covariance
Finally, the desired parameters,
The estimate
3.4.3 Comparison Between EKF and UKF
EKF is an early development using filtering under the Bayesian framework. As discussed in Section 3.3, its implementation involves derivative-based computation, which causes several limitations, like smoothness requirement for system models and poor stability. Though it outperforms the KLMS-Modified NC-based estimator and other estimators used in radar systems, it has certain limitations. For instance, the derivative requires a smooth system model; however, it is not guaranteed in the radar systems. Moreover, the propagation of estimate and covariance through locally approximated system models leaves scope for further improvement. Despite all the limitations, it attracts practitioners due to its fast computation and implementation simplicity, especially in applications where a small shift in estimation accuracy does not affect the decisiveness about the presence of target (Athans et al., 1968; Rao, 2005; Song and Speyer, 1985).
UKF offers a derivative-free implementation, which is based on numerical approximation. Due to derivative-free implementation, it shows better stability in comparison to the EKF. Along with derivative-free implementation, it offers higher-order approximation of moments and thus outperforms the EKF in terms of estimation accuracy, especially in complex environments (Jiang et al., 2007; Zhan and Wan, 2007; Chang et al., 2013).
Algorithm 2Estimation of time delay and Doppler shift using UKF
1: Input:
2: Output:
3: Initialization:
4: while
5: Compute the prediction parameters
6: Compute the update parameters
7: Return
8: end while
4 Simulation Results
In this section, the performance of the proposed EKF- and UKF-based estimation techniques is validated with Matlab simulation, and a comparative analysis with the existing nonlinear estimator based on KLMS-Modified NC and estimator based on FFT is discussed. We consider two monostatic LFM radar systems having different parameter values. The parameter values are shown in Table 1, where Scenario I (Abatzoglou and Gheen, 1998) and Scenario II (Zhang et al., 2017) refer to the two radar systems. As shown in Table 1, Scenario I represents a practical LFM radar system whose parameter values are different from the other practical LFM radar system referred to as Scenario II. The parameter values for both Scenario I and Scenario II are from the work of Abatzoglou and Gheen (1998) and Zhang et al. (2017), respectively. The practicality of the two considered scenarios is validated by the fact that, for the X-band radar, the center frequency is in the GHz range. The initial values for
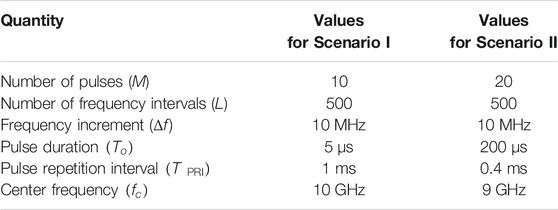
TABLE 1. LFM radar values of Scenario I (Abatzoglou and Gheen, 1998) and Scenario II (Zhang et al., 2017) were used for simulation.

TABLE 2. Initial value of quantities used in simulations for Algorithm 1 and Algorithm 2.
For both Scenario I and Scenario II and for both estimators based on EKF and UKF,
4.1 Estimation of Time Delay and Doppler Shift
The EKF- and UKF-based estimators were implemented with simulated data obtained using (Eq. 10, 11) over 5000 sampling intervals. The true data of states (obtained from Eq. 10) are used as reference values for comparison. The NMSE is given by
where i is the index corresponding to time delay or Doppler shift. The NMSEs obtained from different estimators are shown in Figures 5, 6 for Scenario I and in Figures 7, 8 for Scenario II. The figures show a reduced NMSE as well as a faster convergence for the proposed EKF- and UKF-based estimators compared to the KLMS-Modified NC. Specifically, as shown in Figure 5, the EKF- and UKF-based estimators attain the final NMSE at around
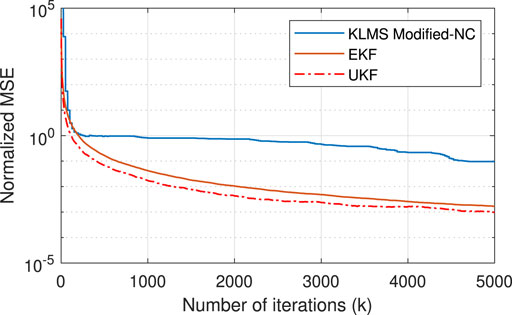
FIGURE 5. NMSE plots of time delay estimation using estimators based on KLMS-Modified NC, UKF, and EKF for Scenario I.
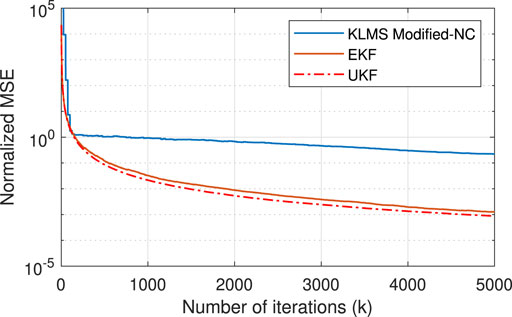
FIGURE 6. NMSE plots of Doppler shift estimation using estimators based on KLMS-Modified NC, UKF, and EKF for Scenario I.
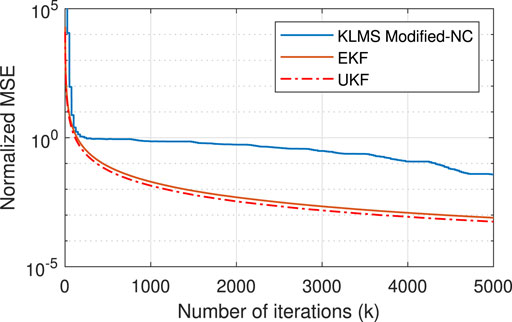
FIGURE 7. NMSE plots of time delay estimation using estimators based on KLMS-Modified NC, UKF, and EKF for Scenario II.
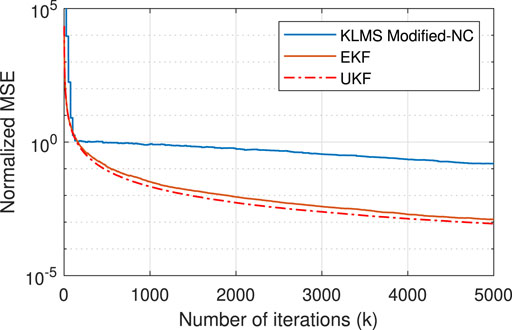
FIGURE 8. NMSE plots of Doppler shift estimation using estimators based on KLMS-Modified NC, UKF, and EKF for Scenario II.
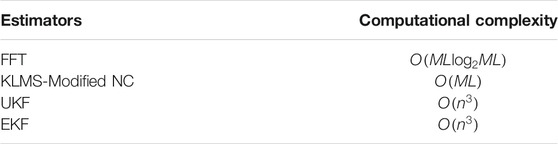
TABLE 3. Computational complexity of estimators based on FFT, KLMS-Modified NC, UKF, and EKF.
4.2 Performance Analysis With Varying SNR
The accuracy of the proposed estimation techniques for various SNRs is evaluated in terms of error variance. The error variance at the
The error variance in the estimation of time delay and Doppler shift is evaluated at various SNRs ranging from
Here,
From the work of Tichavsky et al. (1998),
where
The analytical expression of CRLB for time delay and Doppler shift is given by
The variances obtained from the EKF, UKF, KLMS-Modified NC, and FFT are shown in Figures 9–12. As shown in the figures, the variances obtained with the EKF and UKF are closer to the achievable CRLB in comparison to the KLMS-Modified NC and FFT. Moreover, the figures validate a marginally better accuracy for the UKF compared to the EKF.
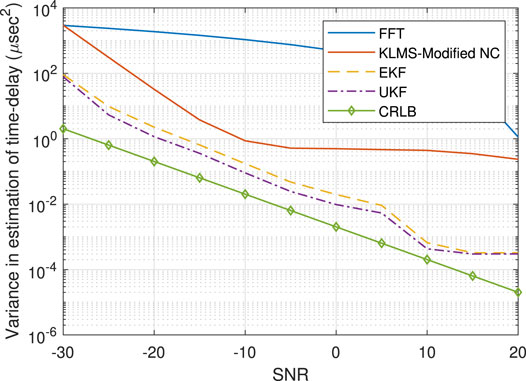
FIGURE 9. Variance in the estimation of time delay using estimation techniques based on UKF, EKF, KLMS-Modified NC, and FFT for Scenario I.
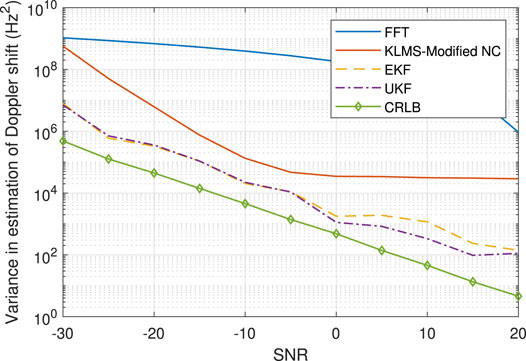
FIGURE 10. Variance in the estimation of Doppler shift using estimation techniques based on UKF, EKF, KLMS-Modified NC, and FFT for Scenario I.
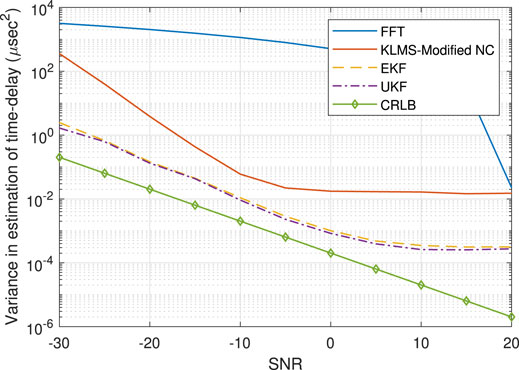
FIGURE 11. Variance in the estimation of time delay using estimation techniques based on UKF, EKF, KLMS-Modified NC, and FFT for Scenario II.
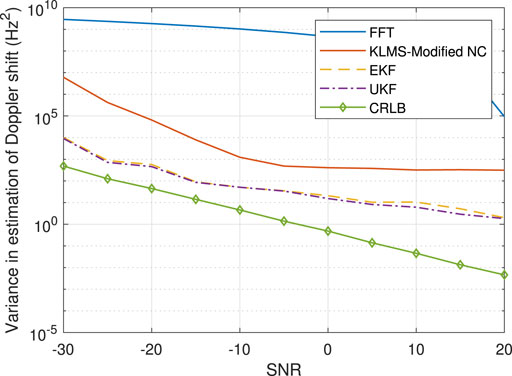
FIGURE 12. Variance in the estimation of Doppler shift using estimation techniques based on UKF, EKF, KLMS-Modified NC, and FFT for Scenario II.
5 Conclusion
Increasing applications of target tracking in space technology, defense systems, and ocean exploration requires radar systems with a highly accurate estimator. The target tracking is based on the estimation of the target’s unknown parameters (time delay and Doppler shift) from the returning signal. The recently introduced nonlinear estimator based on KLMS-Modified NC can significantly improve the accuracy compared to conventional linear estimators. However, its practical utility is limited by the longer convergence time and parameter modeling errors. Hence, to circumvent these shortcomings, in this paper, two new nonlinear estimation techniques, based on EKF and UKF, are proposed. Significantly, EKF estimates the target’s unknown parameters by linearly approximating the system nonlinearity. This significant approximation may lead EKF to suffer from poor estimation accuracy (particularly in complex environments). The UKF, unlike EKF, instead of linearly approximating the system nonlinearity, considers the true nonlinear model for estimation. Consequently, UKF shows better stability in comparison to EKF and is found to yield estimates with slightly better/similar accuracy. Further, to access the comparative performance of the proposed estimation techniques with the existing nonlinear estimator and linear estimator, CRLBs are used as a benchmark. Lastly, simulations performed over realistic LFM radar systems reveal that the proposed nonlinear estimation techniques based on EKF and UKF outperform the recently introduced nonlinear estimator based on KLMS-Modified NC and linear estimation technique based on FFT. Also, the variance yields in the estimation of the time delay and Doppler shift by the proposed estimators are found closer to the corresponding CRLBs.
In the proposed work, the nonlinear version of the Kalman filter (EKF and UKF) suitable for Gaussian perturbation is explored. However, in practice, the presence of clutter, usually model by non-Gaussianity, is ubiquitous. Therefore, in future, to handle the effects of clutter, the nonlinear version of the Kalman filter capable of dealing with non-Gaussianity can be explored. Also, for accurate tracking, the tracker requires range, radial velocity, and angle information. In light of this, the possible challenge of the proposed approach would be how to estimate the angle information at the signal level itself. We left the estimation of angle using the proposed technique as a future work.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material; further inquiries can be directed to the corresponding author.
Author Contributions
US: writing and simulations. AS: writing, provided feedback for simulations and provided reviews on the manuscript. VB: proposing the main Idea and provided reviews on the manuscript. AM: providing reviews on the manuscript.
Funding
This work is an outcome of the research and development work undertaken project under the Visvesvaraya PhD Scheme of the Ministry of Electronics and Information Technology, Government of India, being implemented by Digital India Corporation. The research of Abhinoy Kumar Singh is funded by the Department of Science and Technology, Government of India, under the scheme of Inspire Faculty Award. While pursuing a Postdoc at the Interdisciplinary Centre for Security, Reliability and Trust (SnT), University of Luxembourg, the work has been submitted as a part of a PhD work.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1In this work, the target is assumed to be a perfect reflector; hence, the effect of amplitude attenuation is not considered in the scattered signal.
2The subscript i in fi(t) denotes that f(t) is the instantaneous frequency. Here, i is only used for nominating fi(t) as an instantaneous frequency.
References
Abatzoglou, T. J., and Gheen, G. O. (1998). Range, Radial Velocity, and Acceleration MLE Using Radar LFM Pulse Train. IEEE Trans. Aerosp. Electron. Syst. 34, 1070–1083. doi:10.1109/7.722676
Anderson, B. D., and Moore, J. B. (2012). Optimal Filtering (Courier Corporation). New York: Dover Publications.
Arasaratnam, I., and Haykin, S. (2009). Cubature Kalman Filters. IEEE Trans. Automat. Contr. 54, 1254–1269. doi:10.1109/tac.2009.2019800
Arulampalam, M. S., Maskell, S., Gordon, N., and Clapp, T. (2002). A Tutorial on Particle Filters for Online Nonlinear/non-Gaussian Bayesian Tracking. IEEE Trans. Signal. Process. 50, 174–188. doi:10.1109/78.978374
Athans, M., Wishner, R., and Bertolini, A. (1968). Suboptimal State Estimation for Continuous-Time Nonlinear Systems from Discrete Noisy Measurements. IEEE Trans. Automat. Contr. 13, 504–514. doi:10.1109/tac.1968.1098986
Bar-Shalom, Y., Li, X. R., and Kirubarajan, T. (2004). Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software. John Wiley & Sons.
Brown, R. G., and Hwang, P. Y. (1992). Introduction to Random Signals and Applied Kalman Filtering, Vol.3. New York: Wiley.
Buzzi, S., Lops, M., Venturino, L., and Ferri, M. (2008). Track-before-detect Procedures in a Multi-Target Environment. IEEE Trans. Aerosp. Electron. Syst. 44, 1135–1150. doi:10.1109/taes.2008.4655369
Chang, L., Hu, B., Li, A., and Qin, F. (2013). Transformed Unscented Kalman Filter. IEEE Trans. Automat. Contr. 58, 252–257. doi:10.1109/tac.2012.2204830
Cortina, E., Otero, D., and D'Attellis, C. E. (1991). Maneuvering Target Tracking Using Extended Kalman Filter. IEEE Trans. Aerosp. Electron. Syst. 27, 155–158. doi:10.1109/7.68158
Farina, A., Ristic, B., and Benvenuti, D. (2002). Tracking a Ballistic Target: Comparison of Several Nonlinear Filters. IEEE Trans. Aerosp. Electron. Syst. 38, 854–867. doi:10.1109/taes.2002.1039404
Gu, T., Liao, G., Li, Y., Quan, Y., Guo, Y., and Huang, Y. (2019). An Impoved Parameter Estimation of Lfm Signal Based on MCKF. IEEE Int. Geosci. Remote Sensing Sympo, 596–599. doi:10.1109/igarss.2019.8898485
Jian Li, J., and Renbiao Wu, R. (1998). An Efficient Algorithm for Time Delay Estimation. IEEE Trans. Signal. Process. 46, 2231–2235. doi:10.1109/78.705444
Jiang, Z., Song, Q., He, Y., and Han, J. (2007). “A Novel Adaptive Unscented Kalman Filter for Nonlinear Estimation.”in 46th Conf. Decision Control IEEE, New Orleans, LA, December 12–14, 2007, 4293–4298. doi:10.1109/cdc.2007.4434954
Julier, S. J., and Uhlmann, J. K. (1997). New Extension of the Kalman Filter to Nonlinear systemsSignal Processing, Sensor Fusion, and Target Recognition VI. Int. Soc. Opt. Photon.) 3068, 182–194. doi:10.1117/12.280797
Julier, S. J., and Uhlmann, J. K. (2004). Unscented Filtering and Nonlinear Estimation. Proc. IEEE 92, 401–422. doi:10.1109/jproc.2003.823141
Julier, S., Uhlmann, J., and Durrant-Whyte, H. F. (2000). A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators. IEEE Trans. Automat. Contr. 45, 477–482. doi:10.1109/9.847726
Kay, S. M. (1993). Fundamentals of Statistical Signal Processing: Estimation Theory. Upper Saddle River, NJ: Prentice Hall PTR.
Koteswara Rao, S. (2005). Modified Gain Extended Kalman Filter with Application to Bearings-Only Passive Manoeuvring Target Tracking. IEE Proc. Radar Sonar Navig. 152, 239–244. doi:10.1049/ip-rsn:20045074
Kulikov, G. Y., and Kulikova, M. V. (2015). The Accurate Continuous-Discrete Extended Kalman Filter for Radar Tracking. IEEE Trans. Signal. Process. 64 (4), 948–958. doi:10.1109/TSP.2015.2493985
Kwon, J., Kwak, N., Yang, E., and Kim, K. (2019). “Particle Filter Based Track-Before-Detect Method in the Range-Doppler Domain, in ” 2019 IEEE Radar Conference (RadarConf) (IEEE), Boston, Massachusetts, April 22–26, 2019, 1–5. doi:10.1109/radar.2019.8835620
Liu, W., Pokharel, P. P., and Principe, J. C., (2008). The Kernel Least-Mean-Square Algorithm. IEEE Trans. Signal. Process. 56, 543–554. doi:10.1109/tsp.2007.907881
Liu, W., Principe, J. C., and Haykin, S. (2011). Kernel Adaptive Filtering: A Comprehensive Introduction, vol.57. John Wiley & Sons.
Masarik, M. P., and Subotic, N. S. (2016). “Cramer-Rao Lower Bounds for Radar Parameter Estimation in Noise Plus Structured Interference.” in IEEE Radar Conference, Philadelphia, PA, May 2–6, 2016 1–4. IEEE.
Mitra, R., and Bhatia, V. (2017). Finite Dictionary Techniques for MSER Equalization in RKHS. SIViP 11, 849–856. doi:10.1007/s11760-016-1031-1
Mitra, R., and Bhatia, V. (2014). The Diffusion-KLMS Algorithm. in Int. Conf. Inf. Technology (IEEE), Bhubaneswar, Odisha, India, December 22–24, 2014, 256–259. doi:10.1109/icit.2014.33
Richards, M. A. (2005). Fundamentals of Radar Signal Processing. New York: Tata McGraw-Hill Education.
Richards, M. A., Scheer, J., Holm, W. A., and Melvin, W. L. (2010). Principles Of Modern Radar (Citeseer). New Jersey: SciTech Publishing.
Rife, D., and Boorstyn, R. (1974). Single Tone Parameter Estimation from Discrete-Time Observations. IEEE Trans. Inform. Theor. 20, 591–598. doi:10.1109/tit.1974.1055282
Singh, A. K., Radhakrishnan, R., Bhaumik, S., and Date, P. (2018). Adaptive Sparse-Grid Gauss-Hermite Filter. J. Comput. Appl. Math. 342, 305–316. doi:10.1016/j.cam.2018.04.006
Singh, U. K., Mitra, R., Bhatia, V., and Mishra, A. K. (2019). Kernel LMS-Based Estimation Techniques for Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 55, 2501–2515. doi:10.1109/taes.2019.2891148
Singh, U. K., Mitra, R., Bhatia, V., and Mishra, A. K. (2017). Target Range Estimation in OFDM Radar System via Kernel Least Mean Square Technique. Int. Conf. Radar Syst., 1–5. doi:10.1049/cp.2017.0409
Taek Song, T., and Speyer, J. (1985). A Stochastic Analysis of a Modified Gain Extended Kalman Filter with Applications to Estimation with Bearings Only Measurements. IEEE Trans. Automat. Contr. 30, 940–949. doi:10.1109/tac.1985.1103821
Tichavsky, P., Muravchik, C. H., and Nehorai, A. (1998). Posterior Cramer-Rao Bounds for Discrete-Time Nonlinear Filtering. IEEE Trans. Signal. Process. 46, 1386–1396. doi:10.1109/78.668800
Yang, L., Su, W., and Hong, G. (2011). Velocity estimation of moving target using generalized-MUSIC based on stepped-frequency-pulse-train signal. Int. Conf. Radar. vol. 1, 331–334. doi:10.1109/CIE-Radar.2011.6159544
Zhan, R., and Wan, J. (2007). Iterated Unscented Kalman Filter for Passive Target Tracking. IEEE Aerosp. Electron. Syst. Mag. 43, 1155–1163. doi:10.1109/taes.2007.4383605
Keywords: radar systems, KLMS, FFT, EKF, UKF
Citation: Singh UK, Singh AK, Bhatia V and Mishra AK (2021) EKF- and UKF-Based Estimators for Radar System. Front. Sig. Proc. 1:704382. doi: 10.3389/frsip.2021.704382
Received: 02 May 2021; Accepted: 28 June 2021;
Published: 02 August 2021.
Edited by:
Fabio Dell'Acqua, University of Pavia, ItalyReviewed by:
Fabrizio Santi, Sapienza University of Rome, ItalyChengpeng Hao, Institute of Acoustics (CAS), China
Copyright © 2021 Singh, Singh, Bhatia and Mishra. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: U. K. Singh, dWRheS5zaW5naEB1bmkubHU=