 Yunuo Bao1
Yunuo Bao1 Ji Gao
Ji Gao
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Robot. AI, 09 April 2025
Sec. Robotic Control Systems
Volume 12 - 2025 | https://doi.org/10.3389/frobt.2025.1576171
This article is part of the Research TopicLearning and Adaptive Control Systems on RoboticsView all 3 articles
Unmanned surface vehicles (USVs), as a type of marine robotic systems, are widely used in various applications such as maritime surveillance, environmental monitoring, and cargo transportation. This article addresses the trajectory tracking control issue for an USV subject to model uncertainties and actuator faults. A logarithm barrier Lyapunov functions based predefined tracking control scheme is proposed to regulate the position error of the USV into predefined performance region. Then, to ensure the predefined transient and steady state tracking performance of the USV in the presence of actuator faults, we propose an adaptive fuzzy fault-tolerant controller to address the actuator faults. Additionally, to deal with the uncertainties arising from the USV system model, fuzzy logic systems are utilized to estimate the unknown hydrodynamic parameters. Based on the Lyapunov stability criterion, it can be demonstrated that all the closed-loop signals are bounded. Finally, the validity of the developed control scheme is demonstrated from simulation results.
Motivated by their substantial commercial and military importance, unmanned surface vehicles (USVs) have become a focal point in the domains of control theory and engineering (Su et al., 2025b; Shan et al., 2024; Ye et al., 2024; Martinsen et al., 2020; Berman et al. 2020; Wang W. et al., 2024). The commercial worth is manifested in areas such as ocean data acquisition, resource prospecting and construction, as well as bathymetric and environmental assessments (Su et al., 2022b). The military utilizations encompass intelligence gathering, surveillance activities, reconnaissance missions, countermine operations, and submarine hunting (Wen et al., 2022). In general, a dynamic positioning system pertains to the control mechanism of an USV operating in a fully actuated, low-velocity mode (Gao and Li 2024). Its objective is to uphold the USV’s position and orientation at a stationary location or a designated point along its intended path (Gao et al., 2023). The purpose of path-following control is to guide an USV along a prescribed trajectory, often functioning in an underpowered state, navigating it independently through the designated course while maintaining an optimal velocity profile (Wei et al., 2023). Trajectory tracking entails an USV adhering to a precise spatial and temporal path with stringent timing constraints, holding immense importance in marine operations for ensuring safe navigation, minimizing emissions, and conserving energy (Zhang et al., 2024c; Su et al., 2025a). In contrast to path-following, in addition to the steering control algorithm, a defined velocity regulation is now required (Shan et al., 2023).
Currently, a multitude of difficult problems pertain to the control of trajectory tracking for underpowered USVs, with two of these challenges being tackled in this paper. The primary concern revolves around tracking efficacy. Swift and precise trajectory tracking is indispensable for the progression of autonomous capabilities in marine settings and the operational excellence of USVs, particularly in the occurrence of faults (Hu et al., 2016). Relying on the premise of an accurate dynamical representation of the USV, convergence to zero of the tracking deviations was ensured in (Jiang 2002). Accounting for modeling inaccuracies or external disruptions, the boundedness of closed-loop signals was upheld in (Yang et al., 2014; Park et al., 2017). Although adjustable, the predefined values cannot be set for either the convergence rate of the tracking errors or the extent of the residual set, as they are contingent upon uncertain system parameters. The motion control of surface vehicles, particularly focusing on user-specified transient and steady-state performance, was highlighted in (Dai et al., 2016; He et al., 2019; Wang G. et al., 2024). Assurance was given that the tracking errors would enter a predetermined zone at a specified speed. However, because of the exponential convergence performance, the closed-loop errors ultimately approach and settle within the residual set over an indefinite period. In practice, precise trajectory tracking must invariably be accomplished within a specific time and resist the occurrence of failures (Zhang and Yang 2020a). Fortunately, the fault-tolerant prescribed performance control is an effective method. The authors in (Zhang and Yang 2020b) firstly develop a new fault-tolerant prescribed tracking control method for unknown Euler–Lagrange systems, where a novel fault compensation strategy is proposed to ensure the prescribed tracking accuracy and time even if facing the actuator failures. In Zhang et al. (2024a), a challenging fault-tolerant prescribed performance control problem is solved for wheeled mobile robots by designing a novel mixed-gain adaption technology. The work in Wu et al. (2024) develops a novel finite-time prescribed performance control for stochastic systems subject to actuator faults.
As the complexity of modern USVs continues to rise, faults have become virtually unavoidable, potentially causing a decline in performance, system instability, or, in the worst-case scenario, catastrophic accidents (Hao et al., 2021; Andreotti et al., 2024; Wu et al., 2025). Among all potential fault types, actuator faults pose a particularly grave threat, as they can directly alter the behavior of the system through erroneous actuator actions (Li 2019). Motivated by these observations, a fault-tolerant trajectory tracking for an USV to counteract actuator faults was developed in (Wan et al., 2022). The authors in Liu et al. (2024) proposed a leader-following fault-tolerant tracking control method for multiple USVs. In Li et al. (2024), the problem of fuzzy adaptive tracking control for USVs subject to actuator faults has been addressed. To realize the predefined transient performance tracking, an event-based intelligent fault-tolerant control approach was developed in (Su et al., 2022a).
Driven by these observations, this article investigates the adaptive predefined performance trajectory tracking control issue for an USV in the presence of actuator faults. The main contributions of the article are summarized as follows: (1) By fusing the fuzzy logic system into adaptive mechanism, an adaptive fuzzy tracking strategy is developed for an uncertain USV system. The proposed control laws for kinematics and kinetics of the USV can accommodate significant model uncertainties. In this article, we dispense with the assumption concerning the availability of precise or partial information on the dynamic model parameters of the USV; (2) by designing the intermediate control laws in surge and yaw in the kinetic layer design, an adaptive fault-tolerant controller is proposed to address actuator faults and create controllers that do not rely on any prior information about the unknown system parameters or actuator malfunctions; (3) a position error constraint mechanism is employed to solve the underactuation of the USV. By managing the shifted tracking variable, the proposed method allows the user to predetermine both the convergence time and the control precision.
From Xu et al. (2024b), the USV model with kinematics and kinetics is given by
where
In practice, it is preferable for the controlled USV to possess fault resistance. The paper considers the following actuator failures as
where
The article concentrates on the trajectory tracking control issue for the USV in a desired reference
where
To continue, we introduce the following assumptions.
Assumption 1. The unknown constants
Assumption 2. The given reference trajectory
Assumption 3. Zhang et al. (2024c) The sway speed
Assumption 4. The disturbance terms
Based on Equation 1, and differentiating
where
Based on the prearranged time
with
in which the design parameter
Then, we employed the following Lyapunov function to manage the shifted position error
Based on Equation 4, the time derivative of
where
Next, the virtual surge speed signal can be proposed as
where
By invoking Equation 10 into Equation 9, one has
By differentiating
where
Define the following Lyapunov function as
Based on Equation 12, differentiating
Design the virtual yaw rate control law as
where
By substituting Equation 15 into Equation 14, one obtains that
Due to the unknown fault parameters, we define
and
By differentiating
where
Select the following Lyapunov function as
where
From Equations 17, 18 differentiating
where
where
Design the following control laws as
where
Design the following adaptive laws as
where
With the virtual control laws Equations 10, 15, actual control laws (Equations 24, 25), and adaptive laws Equations 26–31, the USV control system (1) under Assumptions 1 and 2 has two properties:
1) The position error can be managed into the prescribed area
2) All closed-loop signals are bounded.
From Equations 24, 25, and Lemma 5 in (Liang et al., 2021), one can get
Based on the Young’s inequality, one has
where
By invoking Equations 21–25, Eqautions 26–32, and Equations 33, 34 into Equation 20, we have
Employing the inequality
Using the Young’s inequality Su et al. (2024b); Teng et al. (2024a); Xu Y. et al. (2024); Li et al. (2025), we have
By substituting Equation 36 and Equation 37 into Equation 35, it follows that
Design the total Lyapunov function as
From Equations 11, 16, 38, the time derivative of
where
Then, Equation 40 can be further written as
where
Integrating both sides of Equation 41, we have
Therefore, closed-loop signals
Because
The validity of presented control method is demonstrated by the numerical simulation.
The system parameters are chosen as
It is assumed that the actuators in surge and yaw simultaneously undergo multiplicative faults and additive faults at
The adjusting parameters are given by
Fault-tolerance performance: To show the advantage and effectiveness of the proposed fault-tolerant control method, a comparison between the classical prescribed performance tracking control method in (Zhang et al., 2024c) and our method is proposed. In order to ensure the fairness of the comparison, all design parameters are the same. The tracking performance is described in Figure 1, from which it is observable that the control performance is well guaranteed even subject to faults based on our method. Figure 2 describes that the position error can be regulated into the prescribed area
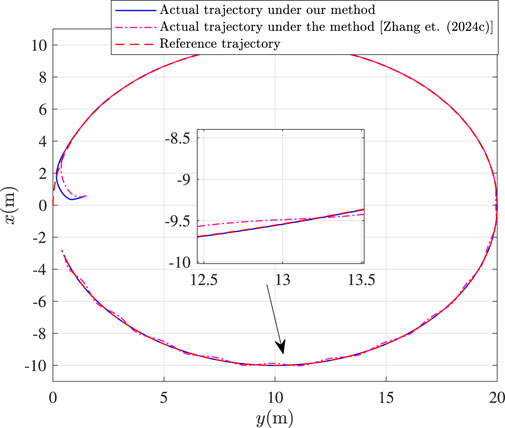
Figure 1. Tracking control performance.
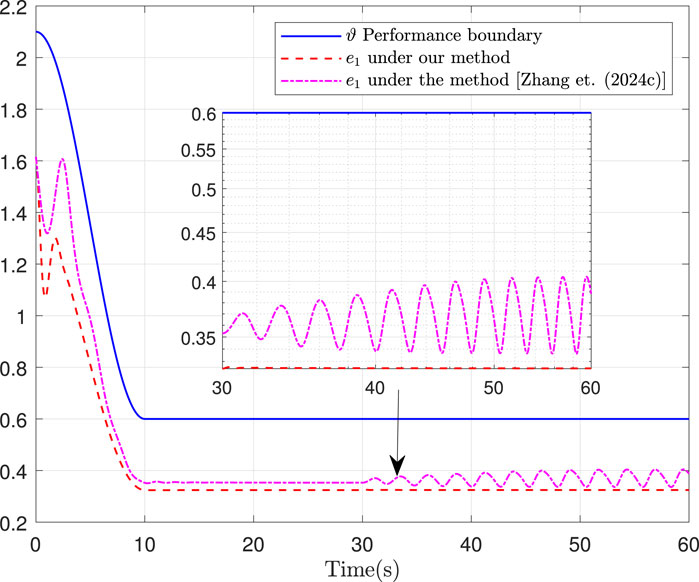
Figure 2. Position error.
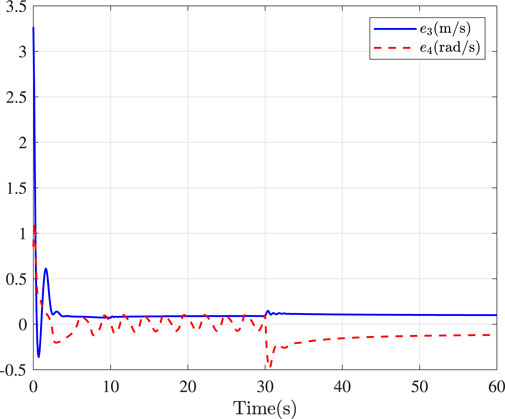
Figure 3. Speed errors in surge and yaw.
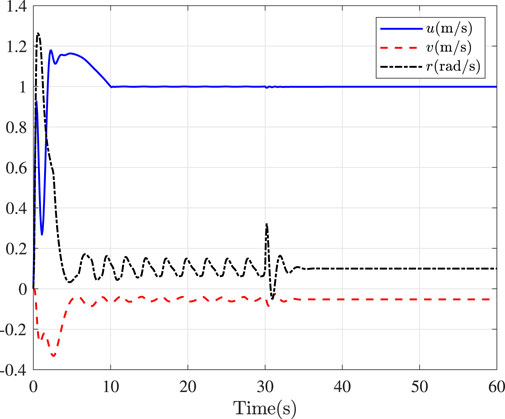
Figure 4. Linear speeds and yaw rate.
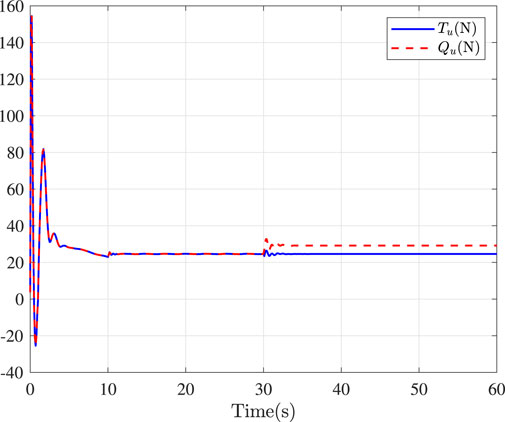
Figure 5. Control inputs in surge.
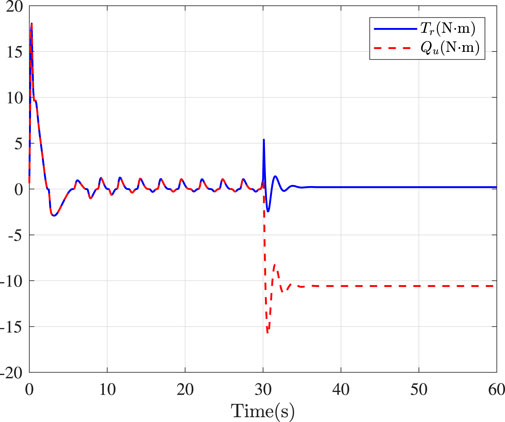
Figure 6. Control inputs in yaw.
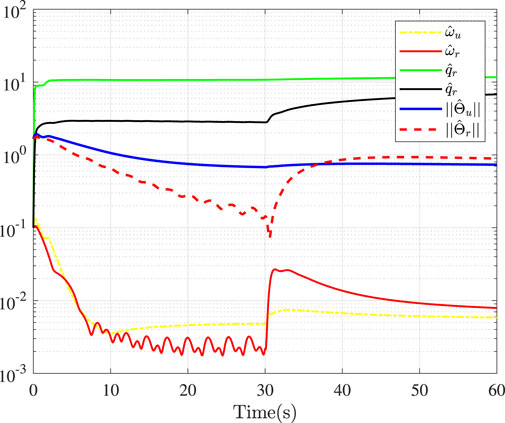
Figure 7. Adaptive parameters.
Robustness Test: In order to demonstrate the robustness of the developed control strategy against actual disturbances, the ocean disturbances resulting from waves, winds, and currents are considered from a simulation testing. In simulation, the ocean disturbances are mimicked as a Gaussian random process. Specifically, a second-order bandstop filter is employed to mimic the high-frequency wave motion and a first-order transfer function is used to denote the slow-varying disturbance resulting from wave drift, ocean currents, and winds in the yaw channel. Thus, the disturbance terms are shown as
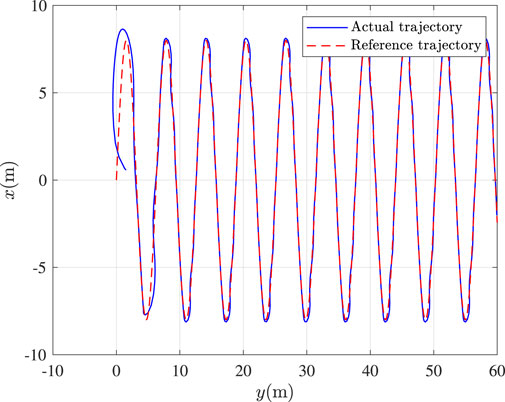
Figure 8. Tracking control performance under actual ocean disturbances.
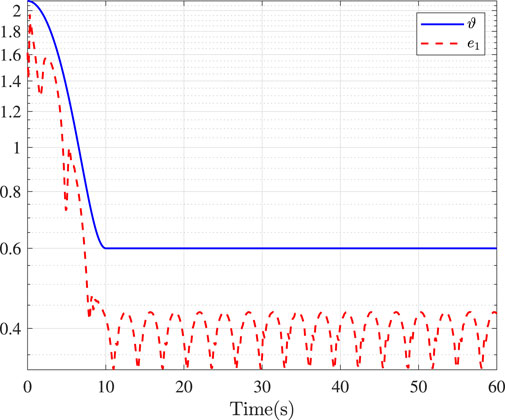
Figure 9. Position error under actual ocean disturbances.
This article has investigated the fuzzy adaptive fuzzy predefined performance tracking control issue for the USV subject to actuator faults. By integrating the logarithm barrier Lyapunov functions with adaptive control strategy, the position error is managed into predefined performance region and closed-loop signals are all bounded. Moreover, the proposed adaptive fault-tolerant controller can realize desired control performance even with actuator faults. Future work will focus on the security control problem of the USV with cyber attacks (Teng et al., 2025; Teng et al., 2024b). Considering that all the closed-loop signals are semiglobally uniformly ultimately bounded in this paper, future work also will devote to realize a globally stable result (Zhang et al., 2024b).
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
YB: Methodology, Validation, Writing – original draft. JG: Conceptualization, Funding acquisition, Visualization, Writing – review and editing. PP: Investigation, Resources, Software, Writing – original draft.
The author(s) declare that no financial support was received for the research and/or publication of this article.
Authors JG and PP were employed by company China State Shipbuilding Corporation Limited.
The remaining author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declare that no Generative AI was used in the creation of this manuscript.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Andreotti, A., Caiazzo, B., Lui, D. G., Petrillo, A., and Santini, S. (2024). Asymptotic voltage restoration in islanded microgrids via an adaptive asynchronous event-triggered finite-time fault-tolerant control. Sustain. Energy, Grids Netw. 39, 101406. doi:10.1016/j.segan.2024.101406
Berman, I., Zereik, E., Kapitonov, A., Bonsignorio, F., Khassanov, A., Oripova, A., et al. (2020). Trustable environmental monitoring by means of sensors networks on swarming autonomous marine vessels and distributed ledger technology. Front. Robotics AI 7, 70. doi:10.3389/frobt.2020.00070
Dai, S.-L., Wang, M., and Wang, C. (2016). Neural learning control of marine surface vessels with guaranteed transient tracking performance. IEEE Trans. Industrial Electron. 63, 1717–1727. doi:10.1109/TIE.2015.2504553
Du, P., Peng, X., Li, Z., Li, L., and Zhong, W. (2022). Performance-guaranteed adaptive self-healing control for wastewater treatment processes. J. Process Control 116, 147–158. doi:10.1016/j.jprocont.2022.06.004
Gao, X., and Li, T. (2024). Dynamic positioning control for marine crafts: a survey and recent advances. J. Mar. Sci. Eng. 12, 362. doi:10.3390/jmse12030362
Gao, X., Long, Y., Li, T., Hu, X., Chen, C. L. P., and Sun, F. (2023). Optimal fuzzy output feedback control for dynamic positioning of vessels with finite-time disturbance rejection under thruster saturations. IEEE Trans. Fuzzy Syst. 31, 3447–3458. doi:10.1109/TFUZZ.2023.3257200
Hao, L.-Y., Zhang, Y.-Q., and Li, H. (2021). Fault-tolerant control via integral sliding mode output feedback for unmanned marine vehicles. Appl. Math. Comput. 401, 126078. doi:10.1016/j.amc.2021.126078
He, S., Dai, S.-L., and Luo, F. (2019). Asymptotic trajectory tracking control with guaranteed transient behavior for msv with uncertain dynamics and external disturbances. IEEE Trans. Industrial Electron. 66, 3712–3720. doi:10.1109/TIE.2018.2842720
Hu, C., Wang, R., Yan, F., and Chen, N. (2016). Robust composite nonlinear feedback path-following control for underactuated surface vessels with desired-heading amendment. IEEE Trans. Industrial Electron. 63, 6386–6394. doi:10.1109/TIE.2016.2573240
Jiang, Z.-P. (2002). Global tracking control of underactuated ships by lyapunov’s direct method. Automatica 38, 301–309. doi:10.1016/S0005-1098(01)00199-6
Li, K., Feng, K., and Li, Y. (2024). Fuzzy adaptive fault-tolerant formation control for usvs with intermittent actuator faults. IEEE Trans. Intelligent Veh. 9, 4445–4455. doi:10.1109/TIV.2024.3358351
Li, Y.-X. (2019). Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems. Automatica 106, 117–123. doi:10.1016/j.automatica.2019.04.022
Li, Z., An, T., Dong, B., and Yuan, X. (2025). Event-triggered v2v communication-based cooperative adaptive tracking control for nonlinear vehicle platoon systems with unknown lag time. Nonlinear Dyn. 113, 519–532. doi:10.1007/s11071-024-10155-3
Liang, H., Guo, X., Pan, Y., and Huang, T. (2021). Event-triggered fuzzy bipartite tracking control for network systems based on distributed reduced-order observers. IEEE Trans. Fuzzy Syst. 29, 1601–1614. doi:10.1109/TFUZZ.2020.2982618
Liu, C., Xia, Z., Tian, Y., and Patton, R. J. (2024). Defense and tolerance technique against attacks and faults on leader-following multi-usvs. IEEE Trans. Intelligent Transp. Syst. 25, 5450–5461. doi:10.1109/TITS.2023.3330570
Martinsen, A. B., Lekkas, A. M., Gros, S., Glomsrud, J. A., and Pedersen, T. A. (2020). Reinforcement learning-based tracking control of usvs in varying operational conditions. Front. Robotics AI 7, 32. doi:10.3389/frobt.2020.00032
Park, B. S., Kwon, J.-W., and Kim, H. (2017). Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 77, 353–359. doi:10.1016/j.automatica.2016.11.024
Shan, Q., Liu, W., Li, T., and Zhang, H. (2024). A topology reconfiguration strategy for containment control of the multi-usv system based on algebraic connectivity. IEEE Trans. Industrial Electron., 1–11doi. doi:10.1109/TIE.2024.3472272
Shan, Q., Wang, X., Li, T., and Chen, C. P. (2023). Finite-time control for usv path tracking under input saturation with random disturbances. Appl. Ocean Res. 138, 103628. doi:10.1016/j.apor.2023.103628
Su, Y., Liang, H., Pan, Y., and Chen, D. (2022a). Event-triggered adaptive fuzzy fault-tolerant control for autonomous underwater vehicles with prescribed tracking performance. Int. J. Syst. Sci. 53, 1353–1366. doi:10.1080/00207721.2021.2002462
Su, Y., Shan, Q., Li, T., and Chen, C. L. P. (2024a). Variable separation-based fuzzy optimal control for multiagent systems in nonstrict-feedback form. IEEE Trans. Fuzzy Syst. 32, 547–561. doi:10.1109/TFUZZ.2023.3302293
Su, Y., Shan, Q., Li, T., and Zhang, H. (2024b). Prescribed-time optimal resilient consensus control for nonlinear uncertain multiagent systems. IEEE Trans. Syst. Man, Cybern. Syst. 54, 6127–6140. doi:10.1109/TSMC.2024.3417186
Su, Y., Teng, F., Li, T., Liang, H., and Chen, C. L. P. (2025a). Fuzzy-based optimal control for an underactuated surface vessel with user-specified performance. IEEE Trans. Intelligent Transp. Syst., 1–15doi. doi:10.1109/TITS.2025.3526758
Su, Y., Teng, F., Li, T., and Sun, Q. (2025b). Adaptive prescribed-time tracking control for an unmanned surface vehicle considering motor-driven propellers. IEEE Trans. Industrial Inf. 21, 1665–1673. doi:10.1109/TII.2024.3485795
Su, Y., Xue, H., Liang, H., and Chen, D. (2022b). Singularity avoidance adaptive output-feedback fixed-time consensus control for multiple autonomous underwater vehicles subject to nonlinearities. Int. J. Robust Nonlinear Control 32, 4401–4421. doi:10.1002/rnc.6038
Teng, F., Ban, Z., Li, T., Sun, Q., and Li, Y. (2024a). A privacy-preserving distributed economic dispatch method for integrated port microgrid and computing power network. IEEE Trans. Industrial Inf. 20, 10103–10112. doi:10.1109/TII.2024.3393569
Teng, F., Zhang, X., Li, T., Shan, Q., Philip Chen, C. L., and Li, Y. (2025). Distributed resilient energy management for seaport microgrid against stealthy attacks with limited security defense resource. IEEE Trans. Cybern. 55, 917–926. doi:10.1109/TCYB.2024.3514693
Teng, F., Zhang, Y., Yang, T., Li, T., Xiao, Y., and Li, Y. (2024b). Distributed optimal energy management for we-energy considering operation security. IEEE Trans. Netw. Sci. Eng. 11, 225–235. doi:10.1109/TNSE.2023.3295079
Wan, L., Cao, Y., Sun, Y., and Qin, H. (2022). Fault-tolerant trajectory tracking control for unmanned surface vehicle with actuator faults based on a fast fixed-time system. ISA Trans. 130, 79–91. doi:10.1016/j.isatra.2022.04.013
Wang, G., Zuo, Z., and Li, P. (2024a). Distributed control in uncertain nonlinear multiagent systems under event-triggered communication and general directed graphs. IEEE Trans. Signal Inf. Process. over Netw. 10, 599–609. doi:10.1109/TSIPN.2024.3422878
Wang, W., Shan, Q., Li, T., Chen, C. L. P., and Wang, Y. (2024b). Finite-time-prescribed performance-based platoon formation control for unmanned surface vehicles using event-triggered extended state observer. IEEE Trans. Veh. Technol. 73, 18460–18471. doi:10.1109/TVT.2024.3432742
Wei, J., Zhang, J., Liu, Z., Qu, J., Sui, B., and Zhang, Y. (2023). Path-following and obstacle-avoidance control of usv based on finite-distance convergence. J. Mar. Sci. Eng. 12, 34. doi:10.3390/jmse12010034
Wen, G., Fang, X., Zhou, J., and Zhou, J. (2022). Robust formation tracking of multiple autonomous surface vessels with individual objectives: a noncooperative game-based approach. Control Eng. Pract. 119, 104975. doi:10.1016/j.conengprac.2021.104975
Wu, Y., Hu, L., Chen, Q., Zhang, Y., and Wu, L. (2025). Dynamic event-triggered fault-tolerant control for nonaffine systems with asymmetric error constraint. Fuzzy Sets Syst. 499, 109180. doi:10.1016/j.fss.2024.109180
Wu, Y., Hu, L., Liu, L., Zhang, Y., and Zhang, Y. (2024). Finite time prescribed performance control for stochastic systems with asymmetric error constraint and actuator faults. Commun. Nonlinear Sci. Numer. Simul. 139, 108290. doi:10.1016/j.cnsns.2024.108290
Xu, Y., Liang, H., Li, T., Long, Y., Cheng, Y., and Wang, D. (2024a). Adaptive fuzzy resilient control of nonlinear multiagent systems under dos attacks: a dynamic event-triggered method. IEEE Trans. Fuzzy Syst. 32, 3568–3580. doi:10.1109/TFUZZ.2024.3376402
Xu, Z., He, S., Zhou, W., Li, Y., and Xiang, J. (2024b). Path following control with sideslip reduction for underactuated unmanned surface vehicles. IEEE Trans. Industrial Electron. 71, 11039–11047. doi:10.1109/TIE.2023.3340191
Yang, Y., Du, J., Liu, H., Guo, C., and Abraham, A. (2014). A trajectory tracking robust controller of surface vessels with disturbance uncertainties. IEEE Trans. Control Syst. Technol. 22, 1511–1518. doi:10.1109/TCST.2013.2281936
Ye, P., Yu, R., and Shan, Q. (2024). Distributed neuroadaptive formation control for aerial base station-assisted hovercraft systems with mixed disturbances. J. Mar. Sci. Eng. 12, 1946. doi:10.3390/jmse12111946
Zhang, J.-X., Ding, J., and Chai, T. (2024a). Fault-tolerant prescribed performance control of wheeled mobile robots: a mixed-gain adaption approach. IEEE Trans. Automatic Control 69, 5500–5507. doi:10.1109/TAC.2024.3365726
Zhang, J.-X., Song, J.-G., and Shi, P. (2024b). Decentralized robust global prescribed performance control of unknown interconnected nonlinear systems. IEEE Trans. Industrial Electron. 71, 14701–14711. doi:10.1109/TIE.2024.3370953
Zhang, J.-X., and Yang, G.-H. (2018). Fault-tolerant leader-follower formation control of marine surface vessels with unknown dynamics and actuator faults. Int. J. Robust Nonlinear Control 28, 4188–4208. doi:10.1002/rnc.4228
Zhang, J.-X., and Yang, G.-H. (2020a). Fault-tolerant fixed-time trajectory tracking control of autonomous surface vessels with specified accuracy. IEEE Trans. Industrial Electron. 67, 4889–4899. doi:10.1109/TIE.2019.2931242
Zhang, J.-X., and Yang, G.-H. (2020b). Fault-tolerant output-constrained control of unknown euler–Lagrange systems with prescribed tracking accuracy. Automatica 111, 108606. doi:10.1016/j.automatica.2019.108606
Keywords: unmanned surface vehicles (USVs), actuator faults, trajectory tracking, fault-tolerant control, fuzzy adaptive control
Citation: Bao Y, Gao J and Peng P (2025) Fuzzy adaptive fault-tolerant control for an unmanned surface vehicle with prescribed tracking performance. Front. Robot. AI 12:1576171. doi: 10.3389/frobt.2025.1576171
Received: 13 February 2025; Accepted: 25 March 2025;
Published: 09 April 2025.
Edited by:
Farah Bouakrif, University of Jijel, AlgeriaReviewed by:
Jin-Xi Zhang, Northeastern University, ChinaCopyright © 2025 Bao, Gao and Peng. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ji Gao, amlnYW8xMjM0QDEyNi5jb20=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.