 Alfonsina D’Iorio
Alfonsina D’Iorio Federica Garramone1
Federica Garramone1 Silvia Rossi
Silvia Rossi Chiara Baiano
Chiara Baiano Gabriella Santangelo
Gabriella Santangelo- 1Department of Psychology, University of Campania “Luigi Vanvitelli”, Caserta, Italy
- 2Department of Electrical Engineering and Information Technologies, University of Naples Federico II, Napoli, Italy
Background: The Unified Theory of Acceptance and Use of Technology is a self-rated questionnaire to assess twelve constructs related to the level of acceptance of a robot, consisting of 41 items rated on a 5-point Likert scale. The aim of the study was to conduct a preliminary evaluation of the psychometric properties of the Italian version of the UTAUT (I-UTAUT) in a sample of Italian healthy subjects (HCs).
Materials and methods: 30 HCs underwent the I-UTAUT to assess its comprehensibility. Reliability and divergent validity of the I-UTAUT were evaluated in a sample of 121 HCs, who also underwent the Montreal Cognitive Assessment (MoCA).
Results: The final I-UTAUT version was easily comprehensible. There were no missing data, no floor and ceiling effects. Contrarily to the original version, the Principal Components Analysis suggested a seven-component structure; Cronbach’s alpha was 0.94. The I-UTAUT score did not correlate with MoCA.
Conclusion: The I-UTAUT represented a reliable and valid questionnaire to identify the level of acceptance of robotics technology in Italian healthy sample.
Introduction
The number of older people living alone and in need of care has grown during the last decades and the scientific research is increasingly providing evidence of the possible successful application of the Social Assistive Robotics (SAR) in supporting the elderly users. In detail, SAR represent a class of technological devices that combines social interaction with assistive technology to support individuals, particularly the elderly or individuals requiring assistance in daily activities.
Accordingly, recent studies (Cavallo et al., 2018; Di Nuovo et al., 2016; Di Nuovo et al., 2018; Olaronke et al., 2017) showed that SAR can be successfully employed in healthcare environments due to their peculiarity of being able to provide personalized treatments making use of adaptable social skills. Another study (van Dam et al., 2022) showed encouraging results about the use of SAR in increasing the independence of people with executive dysfunctions in disability care.
However, despite the growing interest in developing this type of technology for supporting older people, one-third of all assistive technologies are abandoned within 1 year of use (Gurley and Norcio, 2009) because of fear of trying something new, the lack of training to use new technologies or not perceiving the need for technology (Bevilacqua et al., 2014; Lattanzio et al., 2014; Tacken et al., 2005). For this reason, one of the most important goals of robotics is to be able to give the robot the highest degree of acceptability.
Robot acceptance is influenced by three primary factors (Beer et al., 2011): the robot’s functionality, social abilities, and appearance. Functionality encompasses the robot’s potential role in domestic settings, particularly concerning tasks pertinent to daily living and healthcare, especially for individuals with physical limitations or older adults. A significant aspect of functionality is the level of autonomy, which ranges from full human control (teleoperation) to fully autonomous robot control. Aligning the autonomy level with user expectations is crucial for enhancing acceptance (Huang et al., 2005).
The manner in which humans’ control and interface with robots also plays an essential role in acceptance. When designing robots, it is critical to consider the appropriateness of control methods for specific tasks alongside user preferences and ease of use (Scholtz, 2003).
Social abilities, particularly social intelligence, prominently affect how robots interact with humans. Emotion-expressive capabilities, such as the ability to convey facial expressions, are fundamental for creating advanced intelligent robotic agents, as they can respond sensitively to human emotions and social cues (Cassell et al., 2000). Non-verbal cues, including gestures like nodding and eye movements, also significantly impact interactions, helping to establish a collaborative relationship between humans and robots (Bartneck et al., 2004).
The robot’s appearance further influences acceptance. To facilitate positive interactions, robot design should ensure that users can easily interpret the robot’s behavior (Kanda et al., 2008).
To better understand how various robot-related aspects impact users’ acceptance of robotic systems, several technology acceptance models have been proposed. A notable framework in this context is the Unified Theory of Acceptance and Use of Technology (UTAUT), which was formulated in 2003 by Venkatesh et al. (2003) with the aim to develop a unified model of the eight prominent models of users’ technology acceptance (i.e., the theory of reasoned action, the technology acceptance model, the motivational model, the theory of planned behavior, a model combining the technology acceptance model and the theory of planned behavior, the model of PC utilization, the innovation diffusion theory and the social cognitive theory). Overall, the UTAUT model has been widely used in research to understand how and why individuals and organizations adopt and utilize new technologies, providing valuable insights for designing systems that encourage acceptance and effective use.
Heerink et al. (2009) developed a questionnaire based on the UTAUT model in order to provide robotics developers with a straightforward instrument able to evaluate users’ acceptance of SAR designing or developing for elderly care environments.
In light of the abovementioned issues, it is clear the need of specific and validated instruments which could help human-robot interaction developers in evaluating the acceptability of their own robots and increasing their usability according to users’ attitudes and preferences.
Therefore, the aim of the present study was to conduct a preliminary evaluation of the reliability and validity of the Italian version of the UTAUT questionnaire (I-UTAUT) in a sample of Italian healthy subjects (HCs).
Materials and methods
Italian adaptation of the UTAUT questionnaire
The UTAUT, a self-rated questionnaire, consists of 41 items rated on a 5-point Likert scale. The original version of the scale investigates thirteen constructs related to the level of acceptance of a robot. In particular: Anxiety (ANX): Evoking anxious or emotional reactions when using the system; Attitude (ATT): Positive or negative feelings about the appliance of the technology; Facilitating conditions (FC): Objective factors in the environment that facilitate using the system; Intention to use (ITU): The outspoken intention to use the system over a longer period in time; Perceived adaptability (PAD): The perceived ability of the system to be adaptive to the changing needs of the user; Perceived Enjoyment (PENJ) Feelings of joy or pleasure associated by the user with the use of the system; Perceived ease of use (PEOU): The degree to which the user believes that using the system would be free of effort; Perceived sociability (PS): The perceived ability of the system to perform sociable behavior; Perceived Usefulness (PU): The degree to which a person believes that using the system would enhance his or her daily activities; Social Influence (SI): The user’s perception of how people who are important to him think about him using the system; Social Presence (SP): The experience of sensing a social entity when interacting with the system; Trust (Trust): The belief that the system performs with personal integrity and reliability and finally Use/Usage (USE): The actual use of the system over a longer period in time.
We adapted the UTAUT to Italian language by a translation/re-translation method and, compared to the original version of the questionnaire, we also added preliminary questions aimed to explore the subjects’ perceived familiarity with the use of the technology. Two independent researchers translated the item of the questionnaire and its accompanying instructions. Subsequently, the two translations were merged into a draft and all discrepancies were examined in a consensus meeting. Then, the questionnaire was translated back to English according to Beaton et al. (2000) guidelines (2000) by an independent and English mother tongue translator with no knowledge of the questionnaire.
A panel of independent experts compared the back-translated and the original version of UTAUT to evaluate the linguistic equivalence of the two English versions and approve the translation.
Finally, to explore the appropriateness and the comprehensibility of the provisional Italian translation, an examiner administrated the Italian version of the UTAUT to a group of 30 healthy subjects (HCs) aged from 30 to >80 years. In detail, participants were asked to evaluate the comprehensibility of the instructions and response options responding “Yes” (coded 1) if they were easily understood or “No” (coded 0) if they were poorly understood.
All items and instructions were judged as easily understood by >95% of participants; thus, the Italian version of the UTAUT was considered as final. A copy of the I-UTAUT is available in the Supplementary Material S1.
Population
The I-UTAUT was administrated to consecutive HCs, recruited among employees and in elderly clubs. To be included in the study, subjects had to meet the following inclusion criteria: i. lack of general cognitive decline, as defined by a normal age- and education-adjusted score on the Italian version of the Montreal Cognitive Assessment (total age and education adjusted score on MoCA ≥15.5) (Santangelo et al., 2015); ii, no history of neurological and/or psychiatric disorders based on the DSM-V criteria; iii, being native Italian-speaking.
All participants gave their written informed consent; the study was approved by the local ethics committee.
Statistical analysis
Acceptability of the I-UTAUT was considered appropriate if there was <5% of missing values and <15% of the respondents with the lowest or highest scores (floor and ceiling effects), and a skewness ranging −2 to +2.
Principal Components Analysis (PCA) with Promax Oblique rotation was used to explore the factorial structure of the scale. Following recent guidelines, a sample size of N = 100 is deemed as sufficient to perform a PCA (Kyriazos, 2018). PCA assumptions were tested via Bartlett’s sphericity test and the Kaiser-Meyer-Olkin (KMO) statistic (this last measure being judged as acceptable if >0.6). Items that did not meet the loading threshold of ≥0.4 on any component were considered insufficiently associated with the primary constructs and were removed from further analysis. Additionally, any item that was the sole representative of a component was also excluded, as it lacked sufficient support to form a coherent factor. These criteria ensured that retained items contributed meaningfully to the identified factors, enhancing the clarity and interpretability of the component structure. Then, we conducted a pilot Structural Equation Modeling (SEM) analysis with bootstrapping (1,000 repetitions) to obtain a more robust evaluation of the factor structure of the scale. To identify potentially significant parameters to be added, the modification indices (MIs) (Kline, 2011) of the tested model were also taken into account. The model that included all relevant parameters was used as the reference model. Regarding fit indices, the maximum likelihood (MLχ2) goodness-of-fit test statistics, in combination with the root mean square error of approximation (RMSEA) index and the comparative fit index (CFI) were employed. The following thresholds were considered indicative of acceptable fit: RMSEA values <0.08 and CFI values >0.90 (Browne and Cudeck, 1993).
The internal consistency was assessed using Cronbach’s alpha coefficient, item-total correlation and the average inter-item correlation. The questionnaire was considered to have good reliability if Cronbach’s alpha was >0.70 and if item-total correlation and inter-item correlation was >0.30.
Construct validity was assessed by means of divergent validity. Therefore, correlation of the I-UTAUT score with MoCA score and its sub-domains was performed by Pearson’s correlation coefficient. Moreover, correlation between I-UTAUT and demographic features (i.e., age and years of schooling) was also calculated by Pearson correlation coefficients.
Convergent validity was not assessed because of the absence in literature of further, gold-standard standardized measures of the target construct, to be used as comparison for the proposed instrument.
All analyses were performed using SPSS version-24 (SPSS Inc., Chicago, IL) and JASP version 0.19.2.
Results
A total of 121 HCs were enrolled (53 men and 68 women). Background and psychometric outcomes are displayed in Table 1. There was no missing data, no floor or ceiling effects.

Table 1. Descriptive statistics.
The PCA revealed nine eigenvalues exceeding 1, accounting for 72.5% of variance. However, items 14, 15, and 21 were removed due to low loadings across all components, indicating limited alignment with the primary constructs measured. Additionally, item 38 was removed as it loaded onto a unique factor without any supporting items, failing to provide a stable representation of any broader construct. After the removal of these items, a subsequent PCA was conducted, which revealed seven eigenvalues exceeding 1, accounting for 70% of variance. The scree-plot revealed a four-factor model. However, we chose to rely on the eigenvalues, as this approach was more consistent with the original structure of the scale.
The first component (C1) explained 21.6% of variance, and included items related to the acceptance and perceived usefulness of the robot (Acceptance and Perceived Usefulness; M = 49.25; SD = 11). The second component (C2) explained 16.8% of variance, and included items representing the perceived sociability and empathy of the robot (Perceived Sociability; M = 15.18; SD = 5.92). The third component (C3) explained 10.2% of variance, including items representing user’s individual self-efficacy and intention to use the robot (Self-Efficacy and Usage Intention; M = 11.76; SD = 4.42). The fourth component (C4) explained 0.8% of variance, and included items representing confidence and perceived ease of use of the robot (Confidence and Ease of Use; M = 11.27; SD = 3.13). The fifth component (C5) explained 0.6% of variance, and included items indexing feelings of anxiety or emotional reactions towards the robot (Anxiety; M = 7.92; SD = 1.79). The sixth component (C6) explained 0.38% of variance, and included items indexing need for support in using the robot (Need for Support; M = 6.81; SD = 1.45). The seventh component (F7) explained 0.37% of variance, and included items representing trusting the robot’s advice (Trust; M = 4.71; SD = 2.07). The factors significantly correlated with total I-UTAUT score and among each other (Table 2). The total score of the I-UTAUT was M = 106.92; SD = 21.15.
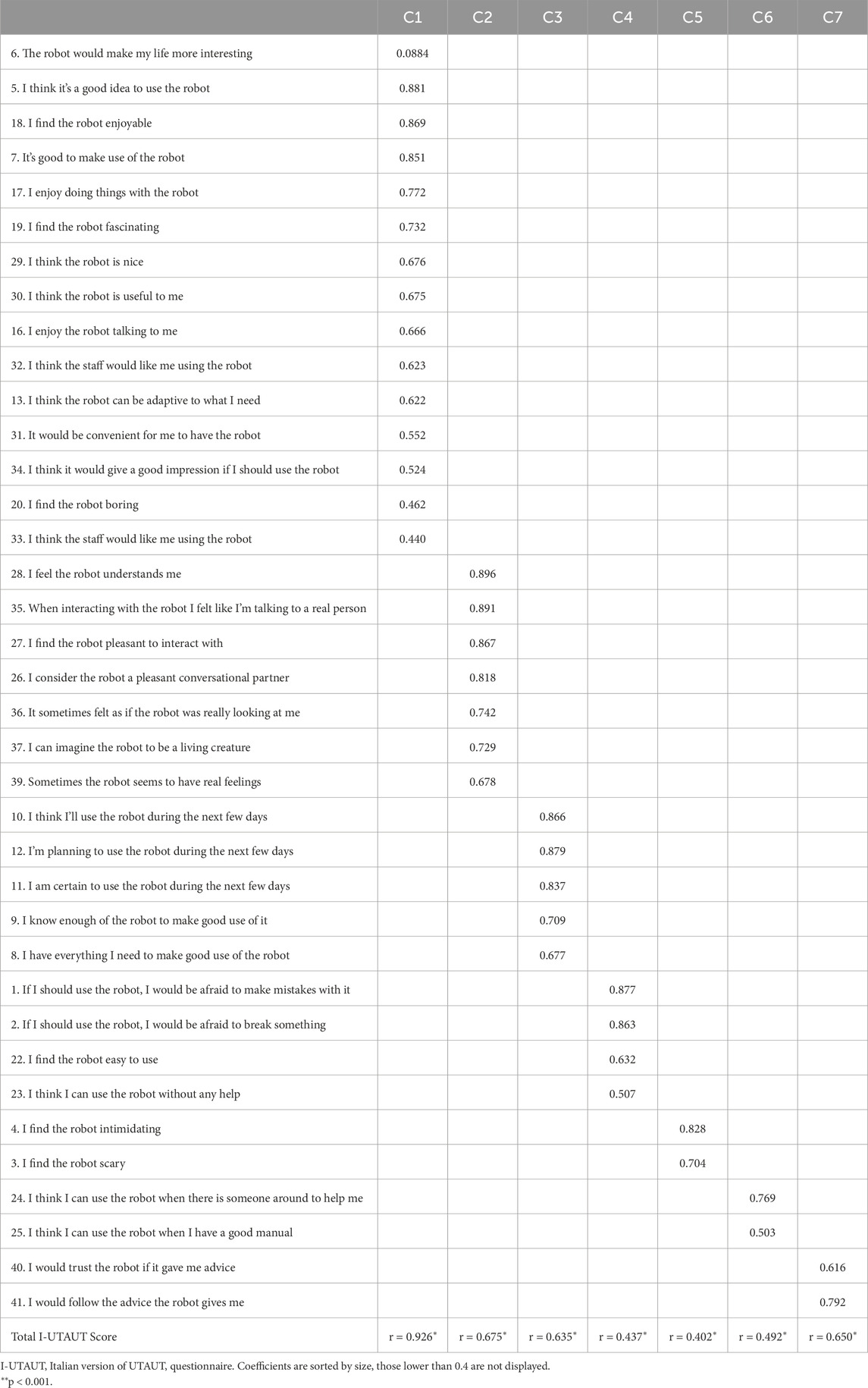
Table 2. Items loadings of the Principal Component Analysis for the I-UTAUT.
The final PCA proved to meet sphericity [χ2 (665) = 8,021.78, p < 0.001] and sampling adequacy (KMO = 0.85) assumptions.
Results of the first pilot SEM did not show a good fit for the 37 items modelled in terms of seven factors: MLχ2 (608) = 1,398.76; p < 0.001; RMSEA = 0.09; CFI = 0.754. The analysis of modification indices (MIs) indicated that the error terms of some of the items were significantly correlated: i.e., items 28 and 27 (MI = 107.42); items 34 and 33 (MI = 61.87); items 18 and 19 (MI = 54.00); items 22 and 23 (MI = 41.84); items 1 and 2 (MI = 41.59); items 32 and 31 (MI = 37.40); items 35 and 37 (MI = 32.51); items 35 and 36 (MI = 25.59); items 5 and 7 (MI = 23.38); items 36 and 37 (MI = 20.74); items 18 and 32 (MI = 19.74); items 6 and 7 (MI = 13.80); items 19 and 31 (MI = 13.61); items 6 and 5 (MI = 13.38); items 30 and 3 (MI = 12.97); items 19 and 32 (MI = 11.74); items 35 and 1 (MI = 11.43); items 18 and 31 (MI = 11.36); items 28 and 9 (MI = 11.10); items 1 and 22 (MI = 10.56); items 9 and 8 (MI = 10.48); items 27 and 36 (MI = 10.48); items 28 and 35 (MI = 10.43); items 19 and 33 (MI = 10.40) and items 18 and 33 (MI = 10.29). Thus, these additional paths were included in the model that was considered as the new 37-item seven-factor model and the fit of the model was tested again. Results of this pilot SEM showed an adequate fit for the corrected model that considered all the significant paths between items, MLχ2 (583) = 932.50; p = 0.081; RMSEA = 0.06; CFI = 0.901. The standardized item saturations ranged from 0.999 to 0.433 for the first factor; from 0.999 to 0.470 for the second factor; from 0.998 to 0.437 for the third factor; from 0.999 to 0.227 for the fourth factor; from 0.999 to 0.675 for the fifth factor; from 0.800 to 0.234 for the sixth factor and from 0.997 to 0.722 for the seventh factor.
Cronbach’s alpha value of the 37-item I-UTAUT was of 0.94. Item-total correlations ranged from >0.2 to 0.7 for all items except for item 1; after removing item 1 the value of Cronbach’s alpha increased from 0.94 to 0.942. However, since the removal of the item did not change substantially the value of Cronbach’s alpha, we recommended keeping it (Table 3). The average inter-item correlation was 0.301.
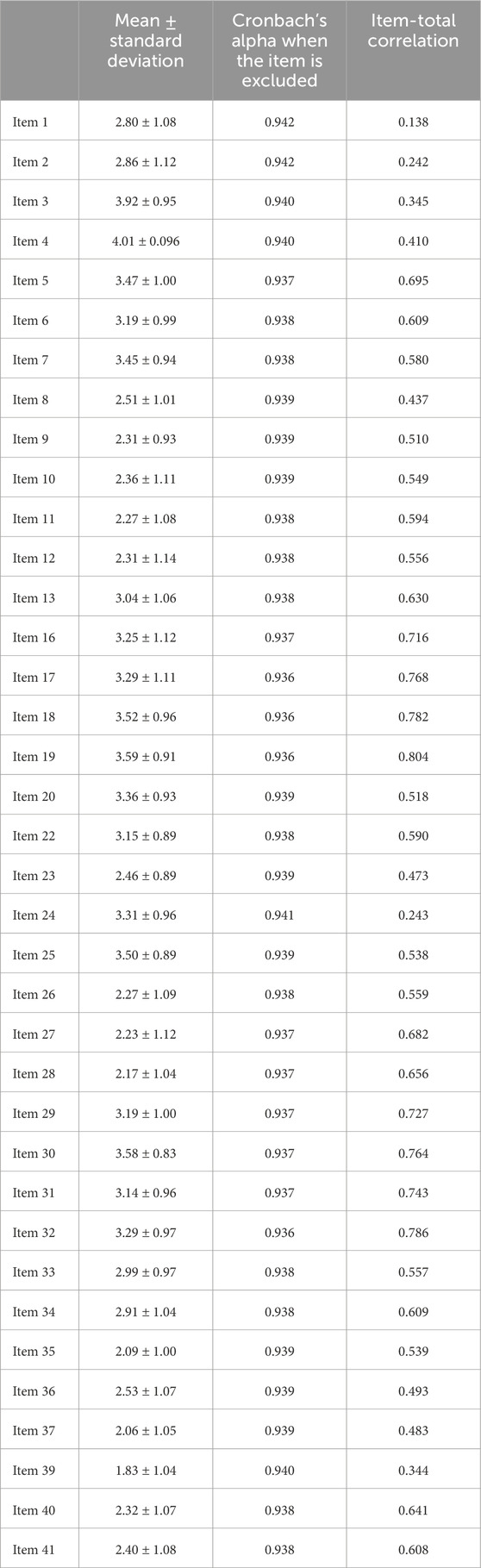
Table 3. Reliability of the I-UTAUT questionnaire.
As for the divergent validity of the questionnaire, I-UTAUT score did not correlate with MoCA score or its sub-domains (Table 4).
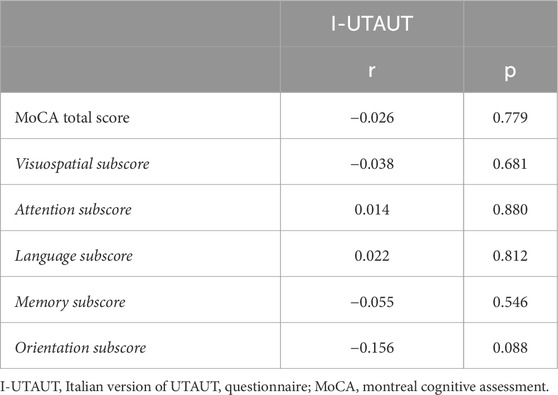
Table 4. Divergent validity between I-UTAUT and MoCA.
Moreover, no correlations were found between I-UTAUT and education, while a significant correlation was found between I-UTAUT and age (r = 0.207; p = 0.023).
Discussion
The present pilot validation study revealed that the I-UTAUT did not meet the original thirteen-dimensional structure of the UTAUT with which it was conceived (i.e., ANX, ATT, FC, ITU, PAD, PENJ, PEOU, PS, PU, SI, SP, Trust, USE). Indeed, the final PCA suggests a seven-component structure describing individuals’ perception regarding certain characteristics of the robot, in particular: 1) acceptance and perceived usefulness; 2) perceived sociability and empathy; 3) individuals’ self-efficacy and intention to use the device; 4) perceived ease of use; 5) feelings of anxiety or emotional reactions; 6) need for support; 7) trusting the robot’s advice. All components were correlated with I-UTAUT total score. However, compared to the original scale, three items (i.e., 14, 15, 21) were removed due to low loadings across all components, suggesting limited alignment with the primary constructs. Additionally, item 38 was removed as it loaded solely onto a unique factor. Results of the pilot SEM with bootstrapping demonstrated an adequate fit for the 37-item seven-factor model. These findings would suggest that psychometric properties of the scale could improve after exclusion of these items and following a seven-factor structure, but further validation studies are necessary to support this change.
Furthermore, the I-UTAUT showed good data quality and acceptability as indicated by no missing value, no floor and ceiling effects. The level of reliability was high as well as the item-level reliability, although item 1 showed a lower item-total correlation. However, item 1 was retained in the scale, as its removal did not result in a substantial improvement in the overall reliability. Moreover, considering the preliminary nature of these findings, we opted to preserve the original structure of the scale to maintain its conceptual integrity. Moreover, the average inter-item correlation witnesses the internal consistency of the questionnaire.
As for divergent validity, we found not significant correlations between the I-UTAUT and MoCA, suggesting that the level of robotics technology acceptance is not influenced by cognitive abilities. This finding appeared to be in line with the study by Sorrentino et al. (2021) who showed that the usability and the user’s perception of the robotics technology was not affected by the cognitive status of the person.
In the present study, no association was found between score on I-UTAUT and years of schooling, but we observed a positive and significant correlation between I-UTAUT and age, suggesting that older adults were more likely to accept a social robot in daily life. Our results could be consistent with the study by Nomura et al. (2012) who showed that people in their twenties, who had experienced humanoid robots directly or in the media, reported higher anxiety levels toward robots than those aged 50–60. However, it is worth noting that older individuals showed a greater tendency to present themselves in a positive light, being more likely to respond to questionnaire items in socially desirable ways (Ausmees et al., 2022). This could be an issue to consider when interpreting this result.
Our study is characterized by some strengths. Indeed, it is the first one to provide data on the psychometric soundness of the Italian version of the UTAUT questionnaire, even covering a wide range of adult age (from 30 to >80 years) and balancing according to gender (see Supplementary Material S2).
Regarding limitations, it should be noted that this study provides construct validity evidence only by means of divergent validity. As a consequence, further investigations are needed to test the convergent validity of the I-UTAUT towards other measures of technology acceptance. Similarly, future studies should better examine test-retest reliability. Moreover, although PCA and pilot SEM analyses were conducted, our sample size was limited and insufficient to support a full exploratory and confirmatory factor analysis. Consequently, the findings should be considered preliminary and require further confirmation in future studies with larger samples.
In conclusion, we demonstrated that the I-UTAUT is a valid and reliable questionnaire to explain and predict human behaviour for hedonic system like social robot, and its adoption is encouraged in clinical practice and research.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Ethics statement
The studies involving humans were approved by University of Campania “Luigi Vanvitelli”. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study.
Author contributions
AD: Data curation, Methodology, Validation, Writing–original draft, Writing–review and editing. FG: Writing–original draft, Writing–review and editing. SR: Conceptualization, Data curation, Funding acquisition, Project administration, Software, Supervision, Writing–original draft, Writing–review and editing. CB: Methodology, Formal analysis, Writing–review and editing. GS: Supervision, Writing–original draft, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This work has been supported by the Italian MUR and EU under the CHIST-ERA IV project COHERENT (PCI2020-120718-2).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2025.1371583/full#supplementary-material
References
Ausmees, L., Kandler, C., Realo, A., Allik, J., Borkenau, P., Hřebíčková, M., et al. (2022). Age differences in personality traits and social desirability: a multi-rater multi-sample study. J. Res. Pers. 99, 104245–104316. doi:10.1016/j.jrp.2022.104245
Bartneck, C., Reichenbach, J., and Van Breemen, A. (2004). “Your face robot! The influence of a character’s embodiment on how users perceive its emotional expressions,” in Proceedings of the design and emotion. Ankara.
Beaton, D. E., Bombardier, C., Guillemin, F., and Ferraz, M. B. (2000). Guidelines for the process of cross-cultural adaptation of self-report measures. Spine 25 (24), 3186–3191. doi:10.1097/00007632-200012150-00014
Beer, J. M., Prakash, A., Mitzner, T. L., and Rogers, W. A. (2011). Understanding robot acceptance. Atlanta: Georgia Institute of Technology, 1–45.
Bevilacqua, R., Di Rosa, R. M., Felici, E., Stara, V., Barbabella, F., and Rossi, L. (2014). Towards an impact assessment framework for ICT-based systems supporting older people: making evaluation comprehensive through appropriate concepts and metrics. Cham: Springer.
Browne, M. W., and Cudeck, R. (1993). “Alternative ways of assessing model fit,” in Testing structural equation models. Editors K. Bollen, and J. Long (Newbury Park: Sage), 136–162.
Cassell, J., Sullivan, J., Prevost, S., and Churchill, E. (2000). Embodied conversational agents. Cambridge: MIT Press.
Cavallo, F., Esposito, R., Limosani, R., Manzi, A., Bevilacqua, R., Felici, E., et al. (2018). Robotic services acceptance in smart environments with older adults: user satisfaction and acceptability study. J. Med. Internet Res. 20:e264. doi:10.2196/jmir.9460
Di Nuovo, A., Broz, F., Cavallo, F., and Dario, P. (2016). New Frontiers of service robotics for active and healthy ageing. Int. J. Soc. Robot. 8, 353–354. doi:10.1007/s12369-016-0350-2
Di Nuovo, A., Broz, F., Wang, N., Belpaeme, T., Cangelosi, A., Jones, R., et al. (2018). The multi-modal interface of Robot-Era multi-robot services tailored for the elderly. Intell. Serv. Robot. 11, 109–126. doi:10.1007/s11370-017-0237-6
Gurley, K., and Norcio, A. (2009). “A systematic review of technologies designed to improve and assist cognitive decline for both the current and future aging populations,” in Internationalization, design and global development. Editor N. Aykin (Berlin: Springer), 156–163.
Heerink, M., Krose, B., Evers, V., and Wielinga, B. (2009). “Measuring acceptance of an assistive social robot: a suggested toolkit,” in RO-MAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication, 528–533. IEEE.
Huang, H., Pavek, K., Novak, B., Albus, J., and Messina, E. (2005). “A framework for autonomy levels for unmanned systems (ALFUS),” in Proceedings of the AUVSI's unmanned systems north America. Baltimore, Maryland.
Kanda, T., Miyashita, T., Osada, T., Haikawa, Y., and Ishiguro, H. (2008). Analysis of humanoid appearances in human-robot interaction. IEEE Trans. Robotics 24 (3), 725–735. doi:10.1109/tro.2008.921566
Kline, R. B. (2011). Principles and practice of structural equation modeling. 3rd ed. New York, NY, USA: Guilford Press.
Kyriazos, T. A. (2018). Applied psychometrics: sample size and sample power considerations in factor analysis (EFA, CFA) and SEM in general. Psychology 9, 2207–2230. doi:10.4236/psych.2018.98126
Lattanzio, F., Abbatecola, A. M., Bevilacqua, R., Chiatti, C., Corsonello, A., Rossi, L., et al. (2014). Advanced technology care innovation for older people in Italy: necessity and opportunity to promote health and wellbeing. J. Am. Med. Dir. Assoc. 15 (7), 457–466. doi:10.1016/j.jamda.2014.04.003
Nomura, T., Sugimoto, K., Syrdal, D. S., and Dautenhahn, K. (2012). “Social acceptance of humanoid robots in Japan: a survey for development of the Frankenstein Syndorome Questionnaire,” in IEEE_RAS international conference on humanoid robots, Osaka Japan, 29th–1st Dec.
Olaronke, I., Oluwaseun, O., and Rhoda, I. (2017). State of the art: a study of human-robot interaction in healthcare. Int. J. Inf. Eng. Electron Bus. 9, 43–55. doi:10.5815/ijieeb.2017.03.06
Santangelo, G., Siciliano, M., Pedone, R., Vitale, C., Falco, F., Bisogno, R., et al. (2015). Normative data for the Montreal Cognitive Assessment in an Italian population sample. Neurol. Sci. 36, 585–591. doi:10.1007/s10072-014-1995-y
Scholtz, J. (2003). Theory and evaluation of human robot interactions. Hawaii Int. Conf. Syst. Sci. 36 (HICSS 36), 10 pp. doi:10.1109/hicss.2003.1174284
Sorrentino, A., Mancioppi, G., Coviello, L., Cavallo, F., and Fiorini, L. (2021). Feasibility study on the role of personality, emotion, and engagement in socially assistive robotics: a cognitive assessment scenario. Informatics. 8(2):23. doi:10.3390/informatics8020023
Tacken, M., Marcellini, F., Mollenkopf, H., Ruoppila, I., and Szeman, Z. (2005). Use and acceptance of new technology by older people. Findings of the international MOBILATE survey: ‘Enhancing mobility in later life’. Gerontechnology 3, 126–137. doi:10.4017/gt.2005.03.03.002.00
van Dam, K., Gielissen, M., Reijnders, R., van der Poel, A., and Boon, B. (2022). Experiences of persons with executive dysfunction in disability care using a social robot to execute daily tasks and increase the feeling of independence: multiple-case study. JMIR Rehabil. Assist. Technol. 9 (4), e41313. doi:10.2196/41313
Keywords: UTAUT, SAR, technology acceptance, robotics technology, validity, reliability
Citation: D’Iorio A, Garramone F, Rossi S, Baiano C and Santangelo G (2025) The Italian version of the unified theory of acceptance and use of technology questionnaire: a pilot validation study. Front. Robot. AI 12:1371583. doi: 10.3389/frobt.2025.1371583
Received: 16 January 2024; Accepted: 27 January 2025;
Published: 17 February 2025.
Edited by:
Federico Manzi, Università Cattolica del Sacro Cuore, ItalyReviewed by:
Cynthia Whissell, Laurentian University, CanadaElisabetta Lombardi, eCampus University, Italy
Copyright © 2025 D’Iorio, Garramone, Rossi, Baiano and Santangelo. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Silvia Rossi, c2lsdmlhLnJvc3NpQHVuaW5hLml0; Gabriella Santangelo, Z2FicmllbGxhLnNhbnRhbmdlbG9AdW5pY2FtcGFuaWEuaXQ=