 Sergio D. Sierra M.
Sergio D. Sierra M. Nigel Harris
Nigel Harris Marcela Múnera2
Marcela Múnera2 Carlos A. Cifuentes
Carlos A. Cifuentes
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Robot. AI, 16 August 2024
Sec. Human-Robot Interaction
Volume 11 - 2024 | https://doi.org/10.3389/frobt.2024.1401663
This article is part of the Research TopicAssistive and Service Robots For Health and Home Applications (RH3 – Robot Helpers in Health and Home)View all 9 articles
Introduction: This paper addresses the growing healthcare needs of an ageing population and the lack of advanced technologies with social capabilities that are cost effective, user friendly, and readily adopted. In response to this motivation, a socially assistive walker is designed to provide physical and cognitive support in activities of daily living for older adults.
Methods: Physical and cognitive support is provided by walker’s structure, sensors, and feedback interfaces to assist users daily living activities, as well as, in navigating environment safely and efficiently. The walker’s design arises from semi-structured interviews conducted with ageing experts, leading to the development of two levels or modes of social interaction, namely low and high interaction.
Results and discussion: In a cohort of 14 adults, the study found the device easy to use regardless of the interaction mode, with 78.5% expressing a preference for the version featuring embodiment, verbal feedback, and more proactive cues (p
The landscape of global demographics places an increasing emphasis on providing healthcare and social services for older adults, aiming to ensure their quality of life and overall wellbeing (United Nations and Social Affairs, 2020). In the UK, this demographic shift is notably evident, with approximately 11.6 million individuals aged 65 or older, projected to increase an additional 8.6 million by the year 2075 (Office for National Statistics, 2018). Ageing introduces challenges, including hearing loss, vision impairments, musculoskeletal disorders, depression, and dementia (Maresova et al., 2019). These age-related changes can significantly impact an individual’s independence, often leading to reduced ability to perform daily activities and maintain social interactions. Consequently, this loss of independence can contribute to social exclusion, as older adults may withdraw from community engagement and experience decreased social support (Donovan and Blazer, 2020). The combination of physical limitations and social isolation can severely affect the quality of life, leading to feelings of loneliness, reduced mental health, and overall diminished wellbeing. In this sense, R1priority areas for developing assistive technologies for older adults include gait disorders and falls, support for cognitive function and mental health, and promoting social inclusion.
The ageing process affects mobility and balance, resulting in deviations from the natural gait pattern and a decline in its quality (Auvinet et al., 2017). These age-related disorders not only compromise physical wellbeing but also significantly elevate the risk of falls, potentially causing more injuries and further impairment (Auvinet et al., 2017). A substantial 40% of older adults living in their homes experience at least one fall annually, with even higher rates in care homes, translating to a cost estimate of £2.3 billion per year. As a response, many older adults turn to walkers, with 22% utilising them indoors and 44% outdoors (Thies et al., 2020). However, while aiding mobility, walker frames present heightened cognitive demands for both cognitively healthy older adults and those with cognitive impairments. Particularly when navigating complex paths and manoeuvring around obstacles, paradoxically, walker usage increases the risk of falling and might lead to tripping incidents and disruptions in balance control (Pirker and Katzenschlager, 2017; Hunter et al., 2019).
Furthermore, the ageing process is accompanied by declines in specific cognitive abilities, primarily associated with executive functions (higher-level planning and problem-solving), attention, and episodic memory (Veríssimo et al., 2021). Atypical ageing, including anxiety, stress, depression, mild cognitive impairment and dementia, brings more pronounced cognitive decline. Notably, the prevalence of dementia is on the rise, with around 900k people currently living with dementia in the UK, projected to exceed 1.6 million by 2050 (UK and Hub, 2022).
In response to these challenges, the past two decades have seen active research into assistive robots, encompassing social robots, wearable devices, and smart walkers, designed to support older adults dealing with gait disorders, fall prevention, and cognitive impairments (Łukasik et al., 2020; Soufineyestani et al., 2021). However, despite these efforts, achieving widespread user adoption remains an ongoing challenge due to factors such as multi-targeted assistance (i.e., physical and cognitive), costs, and usability (Getson and Nejat, 2022; Medrano et al., 2023). For instance, in terms of multimodal assistance, social robots have proven to be efficient in providing companionship to older adults (Hirt et al., 2021), while robotic walkers exhibit a high potential for physical assistance (Sierra M. et al., 2021). However, individually, these devices provide opportunities to deliver physical support to users during daily living activities (i.e., social robots) and to motivate users through friendly, intuitive, and personalised interaction (i.e., robotic walkers). P
Recent research underscores the necessity of integrating the strengths of both social robots and robotic walkers to develop a multimodal assistive device that provides comprehensive support for older adults. Such a device would not only offer physical assistance but also engage users through social interaction, addressing both mobility and social wellbeing (Sierra M. et al., 2021; Zhao et al., 2020; Sierra M. et al., 2019; Luz et al., 2015; Bardaro et al., 2022; Stegner and Mutlu, 2022; Lundberg et al., 2022; Nauta et al., 2019).R1
This work presents the design of a social smart walker as the result of a collaborative approach with healthcare experts. This device integrates proven and cost-effective technologies from socially and physically assistive robots into the conventional walker frame. Specifically, this research explores the integration of a social agent into a mobility aid tailored for older adults, specifically a conventional rollator or walker. This work encompasses expert-based design criteria for a social smart walker and its preliminary validation using an experimental assessment involving two distinct social interaction levels for daily living assistance in adults. The proposed validation study aims at addressing the research question: How to maximise the acceptance and adoption of a robotic walker during daily living assistance in older adults employing multimodal levels of social engagement?
Multiple types of robots, including social robots, wearables, and smart or robotic walkers, have addressed daily living assistance. Social robots are designed to provide companionship and support through tasks such as medication reminders, health status monitoring, and emotional support (Céspedes et al., 2021; Getson and Nejat, 2022). However, they face multiple adoption barriers, encompassing relatively high costs compared to alternative technologies (Moyle et al., 2014; Gross et al., 2015), as well as constrained adaptability due to complex pre-programmed functions and user interfaces (Bajones et al., 2018). Similarly, other factors affect the users’ perception and adoption, such as cultural paradigms, limited user familiarity with technology (especially among older adults), and methodological challenges in qualitative studies (Woods et al., 2021). In this sense, research involving commercial robots has underscored the need for more extended interactions, real-world testing, and early-stage collaboration with stakeholders to enhance acceptability (Alonso et al., 2019; Bradwell et al., 2019; Rico et al., 2020; Dosso et al., 2022).
Robotic walkers aim to address gait disorders by incorporating sensors and advanced algorithms to provide tailored assistance to users (Sierra M. et al., 2021, Sierra M. et al., 2022). These devices offer partial weight support while also detecting potential falls and mechanical stabilization with feedback on gait patterns and navigational guidance (Ding et al., 2022). Additionally, a recent review (Verdezoto et al., 2022) analysed multiple studies on smart rollators, focusing on testing, interfaces, and control modes. Most studies have not tested rollators with the target population, relying instead on healthy volunteers. Validated systems, tested by elderly or specific disease populations, typically use force sensors for gait and support monitoring. Rollator interfaces are non-invasive, primarily using upper limb interactions with handlebar sensors like force and torque sensors. Feedback is provided through haptic and visual indicators, with some systems incorporating additional sensors like IMUs and cameras. Recent rollators have shifted to passive or shared-control modes to avoid balance issues. They monitor user conditions and provide assistance with steering, collision avoidance, and energy-saving functions (Verdezoto et al., 2022).R2 Nevertheless, adopting smart walkers remains constrained by factors such as cost, user-friendliness, social presence, and the complexity of functionalities (Ferrari et al., 2020; Werner et al., 2020; Sierra M. et al., 2019; Guamushig-Laica et al., 2022).
In this scenario, there is a need to develop a multimodal assistive device that brings together the benefits of social robots and the physical support and monitoring abilities of robotic walkers. Particularly, literature evidence suggests that robotic walkers can assist with activities of daily living (Sierra M. et al., 2021), prevent falls (Zhao et al., 2020), and monitor physical activity (Sierra Marín et al., 2019). However, similar to conventional walkers, older adults tend not to use their devices at home, which is common when falls occur (Luz et al., 2015). Reasons often include forgetfulness, negative feelings of ageing evoked from the device, and inaccessibility, among others (Luz et al., 2015). Alternatively, social robotics, while they lack physical support, offer a great potential to engage with users (Céspedes et al., 2021), enable more intuitive interaction, and provide companionship (Bardaro et al., 2022). In this sense, designing for caregiving in older adults demands physical support, cognitive support, diverse interaction, and communication (Stegner and Mutlu, 2022). Some recent approaches have targeted such multimodal interaction by integrating service robots to walkers as robotic nursing assistants (Lundberg et al., 2022) or mounting social robots into mobile robots to assist multiple users and proactively position the robot in care homes (Nauta et al., 2019). However, these studies still report systems’ complexity negatively affecting user adoption, expensive robotic platforms, and, in some cases, lack of actual physical support.
The robotic platform presented in this work results from evidence from literature and the outputs of semi-structured interviews with healthcare experts. These information sources helped to identify the functionalities and design requirements for a Socially Assistive Walker (SAW) that is capable of providing daily living assistance to older adults while maintaining both physical and social abilities. The inclusion of clinicians’ views in the design phase is essential for several reasons. Clinicians possess a deep understanding of the day-to-day challenges faced by older adults, particularly those related to mobility, social interaction, and overall health management. Their expertise ensures that the design of the SAW addresses real-world needs and integrates seamlessly into the existing care routines. Moreover, clinicians can provide valuable feedback on the practical aspects of usability, potential barriers to adoption, and the anticipated impact of the technology on patients’ quality of life.R1
Specifically, a group of geriatric care experts was formed by 14 professionals from the England NHS in partnership with AgeUK, Gloucestershire, a neuro-physiologist from CIUSSS West-Central Montreal, an expert consultant former Chief Executive of a UK assistive technology institution, and a senior professor in dementia research from the University of the West of England.
Semi-structured interviews were conducted with a group of experts to extract the design criteria of the SAW. Initially, a set of design alternatives was introduced to the healthcare experts, specifically, four design alternatives integrating social abilities into a walker frame (See Figure 1). The experts were asked to comment on the expected features that should be integrated into the robotic platform, the barriers of existing similar technologies, the expected usability, and the potential applications of this kind of technology.
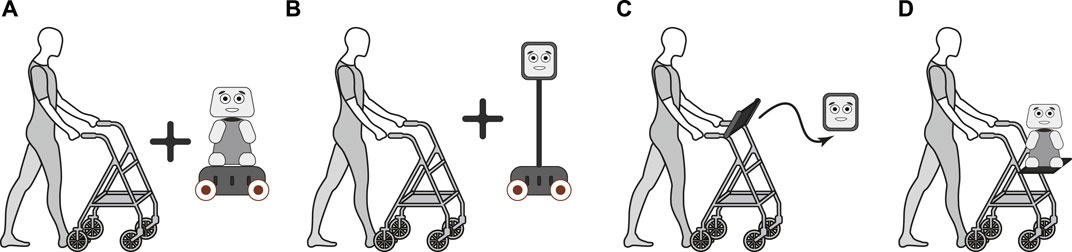
Figure 1. Design alternatives for a socially assistive walker. (A) Walker and social robot on a mobile platform. (B) Walker and telepresence robot. (C) Walker and tablet with a virtual agent. (D) Walker with a social robot on top.
The categories used for grouping the experts’ comments included: 1) Physical Support, the ability to provide robust physical assistance, especially for users with mobility impairments; 2) Cognitive Support, features that support cognitive functions, including reminders and interaction prompts; 3) Tasks Support, assistance with daily tasks and activities of daily living (ADLs), 4) Appearance, aesthetic considerations to ensure the device is appealing, and 5) Safety, ensuring the device is safe for daily use, minimising risks of accidents or malfunctions. Moreover, clinicians were asked to sort the design alternatives based on the following considerations: outdoor usability, technological complexity, and cost.R1
In general terms, the outcomes of the interviews, as a first approach to healthcare institutions, revealed that a robotic walker with social abilities could be a potential solution to mitigate falls in older adults, which is the predominant factor of hospital bed occupancy outlined by the local NHS care board. Furthermore, deploying an SAW could help reduce the workload of caregivers and clinicians, as it can monitor the health state of the users and assist them in activities of daily living. Likewise, experts from care homes stated that deploying a SAW in assisted living homes and residential scenarios will reduce the burden on healthcare systems and allow better on-site and remote access. Table 1 highlights the main design criteria and expected features extracted from the literature and the semi-structured interviews.
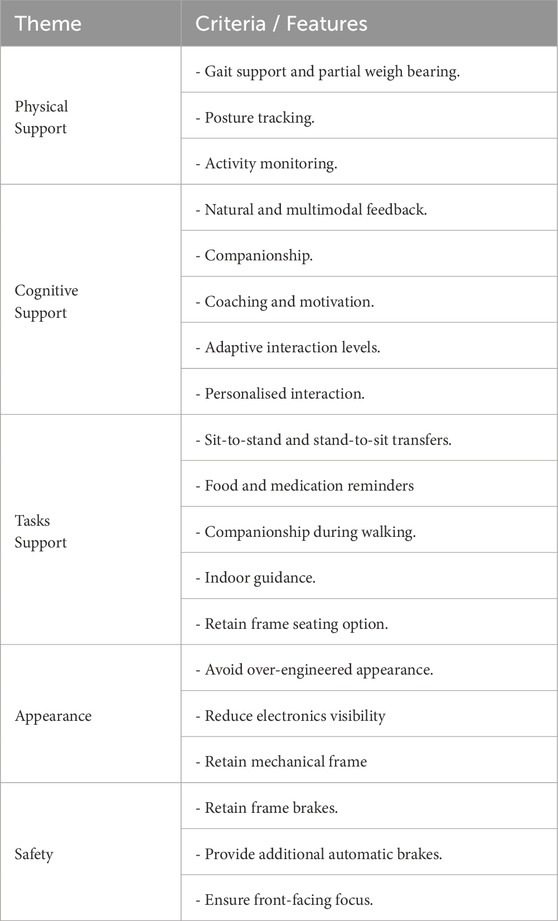
Table 1. Summary of design criteria for a socially assistive walker.
Key articles that significantly influenced the design criteria and features are summarised as follows. (Céspedes et al., 2021; Dosso et al., 2023). focuses on social robots contributing to the criteria related to companionship, emotional support, coaching and motivation. (Sierra M. et al., 2019; Sierra M. et al., 2021; Piau et al., 2019). focuses on robotic walkers contributing to the criteria related to gait support, activity monitoring, and tasks support. (Belpaeme et al., 2018; Rubagotti et al., 2022; Leonardsen et al., 2023). contributed to criteria related to appearance and safety.R1
Regarding the interviews, they were coded using thematic analysis. Themes were grouped into the categories presented in Table 1, reflecting the main design criteria and expected features.R1
According to the above, and considering the experts’ comments on keeping outdoor usability, avoiding technological complexity, and ensuring low-cost alternatives, the third design alternative was selected (See Figure 1C). Moreover, to meet the criteria presented in Table 1, as well as the ability to daily living assistance, several sensors and feedback interfaces were selected.
These articles provided insights into the technological advancements, user needs, and challenges associated with current assistive devices for older adults.
A SAW was designed for this work as a conventional walker frame equipped with multiple sensors and feedback components to provide visual, auditory, and user interface capabilities. Figure 2 shows the designed platform with its sensors and feedback interfaces.
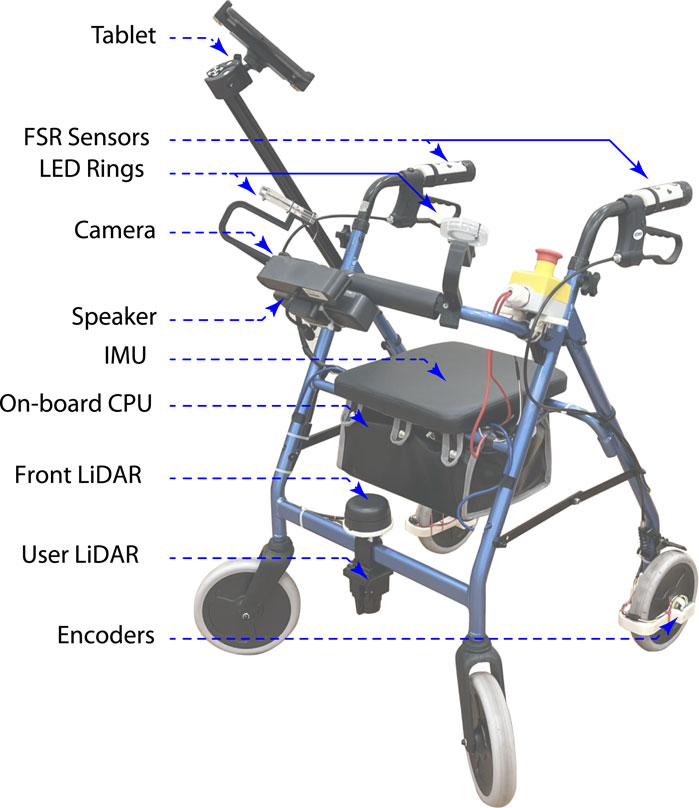
Figure 2. Illustration of the Socially Assistive Walker (SAW) and the feedback interfaces and sensors attached to it.
The SAW equips a Raspberry Pi 4–8 GB (Raspberry Pi Foundation, UK) that runs the Robotic Operating System (ROS) on top of a Linux distribution. A pair of magnetic encoders (AS5600 Magnetic, Osram, Germany) were integrated into the rear wheels, as well as an Inertial Measurement Unit (IMU) (BNO080, SparkFun, United States) below the frame seat to estimate the walker’s odometry. A front LiDAR (RPLIDAR A3 360, Slamtec, China) was placed on the frame to assess obstacles and provide mapping. A rear LRF (URG-04LX-UG01, Hokuyo, Japan) was placed on the frame to track the user’s legs. A USB speaker (HONKYOB, China) was integrated into the platform for auditory feedback. A USB camera (Astra, Orbbec, China) was incorporated and its colour stream is used for posture tracking. A pair of LED rings (NeoPixel x16, Adafruit, United States) were integrated for visual feedback. A pair of FSRs (402, Interlink Electronics, United States) were placed on the handles to track gripping pressure. And finally, a tablet (Galaxy Tab A, Samsumg, South Korea) is attached with a custom extender and holder on the side.
An additional external computer was used to off-load processing pressure from the onboard microcomputer, record experimental data, and serve as a web-socket server for the tablet. This external computer also served as the workstation to monitor the sensors and trigger feedback behaviours on the device.
To assess the acceptance of the proposed SAW, we developed two interaction strategies or social engagement levels for assistance during daily living activities.
According to literature, different levels of social interaction can be achieved by modulating the information provided by the robot, the non-verbal and verbal cues employed to communicate information, the use of dialogues, and the level of embodiment (Onyeulo and Gandhi, 2020; Paetzel et al., 2020; Tan et al., 2020). In this sense, the designed interaction levels were classified as high and low-engagement strategies and were configured as follows:
The SAW was endowed with embodiment through the presence of a virtual agent displayed on the device’s tablet. The agent’s design leans toward a more robot-like appearance to mitigate potential issues related to deception and ethical concerns stemming from the human-like effect and anthropomorphism (Paetzel et al., 2020; Winkle et al., 2021). Nevertheless, to preserve a sense of natural interaction and a minimal level of perceived vitality, the agent has been programmed to engage in sporadic blinking, subtle size fluctuations to mimic motion, and mouth movements while communicating. Regarding feedback, the system employs LED rings to convey a wide range of interactions and states. When tasks are completed, the LED rings emit a reassuring green colour. In situations requiring caution or while waiting for user input, the yellow colour signals this state. A red colour indicates errors. During processing, the LED rings smoothly transition through various shades of blue. When the system is guiding the user, a flashing blue colour is utilised, which can appear on either one side or both sides simultaneously. To further enrich the user experience, auditory feedback is incorporated, utilising Google’s text-to-speech API for generating voice commands. Furthermore, to facilitate personalised and proactive communication, the robot employs the user’s name as an initial point of interaction and explains the available feedback interfaces. Positive feedback is delivered with the inclusion of supportive adjectives, and clear yet comprehensive instructions are provided to enhance the user experience.
In this mode, the SAW operates without embodiment, and consequently, the virtual agent is omitted. Instead, the device’s tablet displays straightforward text instructions, adjusted to a comfortable font size for the user. Feedback is conveyed through the same LED ring states, and notification sounds are employed to signal the presence of new information on the tablet. In this context, instructions are intentionally kept concise and straightforward, omitting the use of the user’s name and additional supportive adjectives to simplify the interaction.
A selection of daily living activities was chosen: 1) greetings, 2) stand-to-sit transfers, 3) reminders for food and hydration, 4) sit-to-stand transfers, 5) indoor guidance, and 6) 2 min of walking. The SAW was programmed to gather data from onboard sensors and deliver suitable feedback during these activities. To accomplish this, the SAW was equipped with additional software modules, such as 1) the ROS navigation stack with a pre-defined map to track the user’s movement within the experimental environment and 2) Google’s Mediapipe library to estimate the user’s posture and sitting state (Google Developers Team, 2023). For safety considerations, an external operator closely monitored and remotely initiated feedback interventions using the information provided by the sensors and the device’s software modules in all cases.
Table 2 describes the system states, the given information, and the feedback provided by the system. In all cases, the operator’s task was to control the flow of the system states by checking whether the users followed or ignored the robot’s feedback. When the user followed the instruction, either positive feedback was given with “Great job!” or “Great” cues for high and low interaction, respectively. Instructions were only given once, and no re-forcing or repetitive strategy was programmed. In these cases, a 5-second timeout was considered to go to the next state. In the case of the guidance activity, positive feedback was only given when the user reached the kitchen, bathroom, and living room inside the experimental studio.
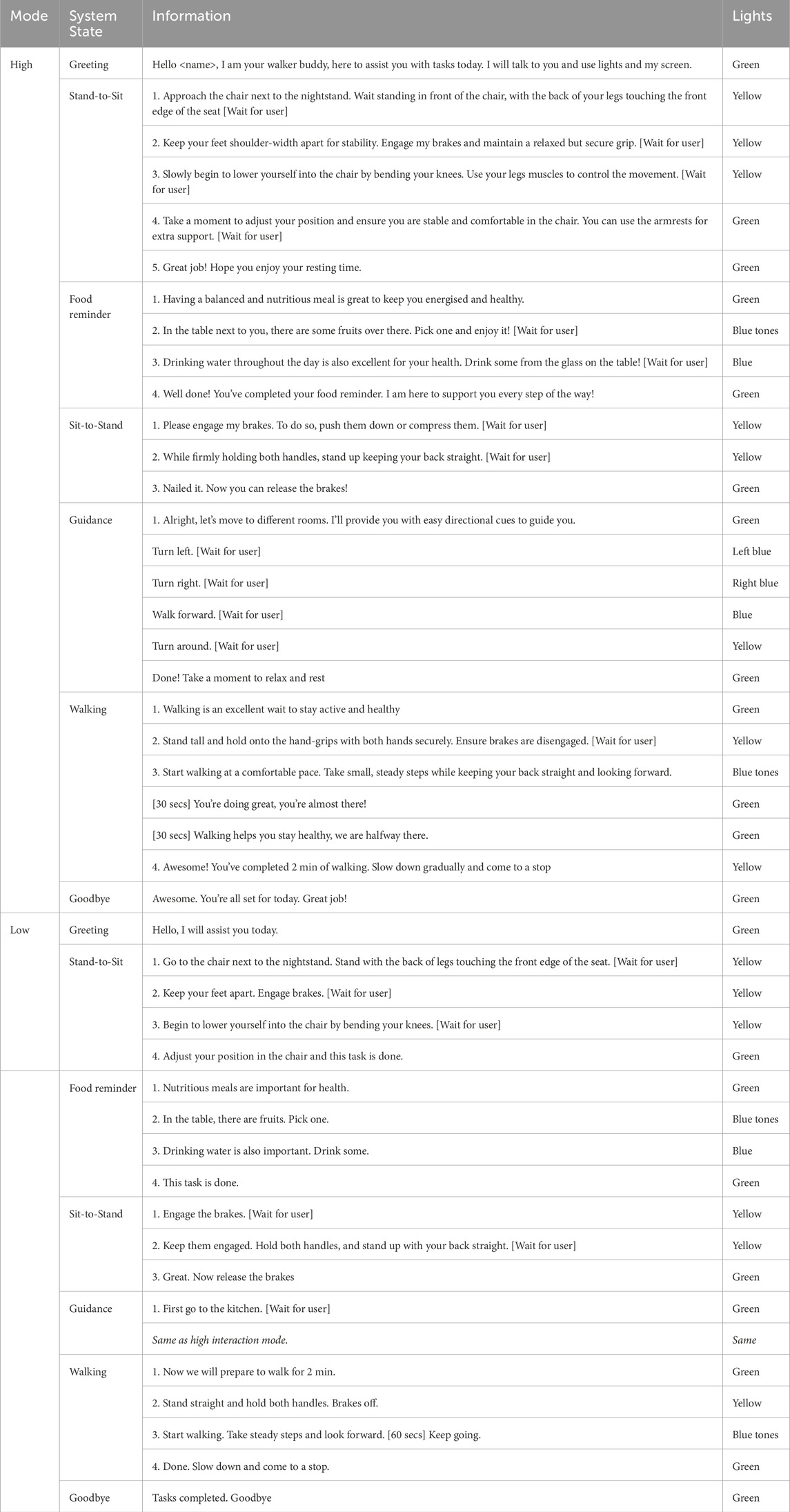
Table 2. Description of utterances under high and low interaction modes, including system states, and lights behaviour.
Healthy adult subjects participated in the study. Participants eligible for the study were adults aged 40 years or older who possess at least a minimal level of familiarity with assistive technologies, can provide informed consent themselves, and have sufficient cognitive abilities to comprehend and adhere to study instructions. Excluded from participation were adults with severe cognitive impairments or dementia that hindered their ability to engage in the study, individuals with uncontrolled medical conditions, those with severe visual or hearing impairments, and individuals with a history of falls or balance issues.
The sessions occurred at the Assistive Living Studio of the Bristol Robotics Laboratory at the University of the West of England. Each participant was asked to attend one session. The studio resembles a house with a living room, kitchen, bedroom, and bathroom. Each session consisted of two trials, one for each level of social engagement. At the beginning of the session, a demographics questionnaire was applied, and a brief explanation of the activities was given without giving particular details on the levels of interaction. The participants were asked to start each trial with their hands on the handles and standing straight. The researcher also asked the participants to pay close attention to the instructions the walker gave, and they were not informed that an external researcher was monitoring and controlling the interaction. At the end of each trial, the participants were asked to fill out a perception questionnaire, and at the end of the session, an open-ended questionnaire was applied.
The demographics questionnaire aimed to uncover participants’ prior experiences and current usage of conventional and robotic assistive devices. It also assessed their current living arrangements and the frequency of their daily interactions with others.
The usability questionnaire was based on UTAUT surveys and previously validated perception surveys for social robots (Heerink et al., 2009; Venkatesh et al., 2012; Horstmann and Krämer, 2020), to evaluate perceptions of each level of social engagement. This assessment encompassed six distinct categories: 1) Anxiety (ANX) to measure concerns about using or potentially damaging the device, 2) Attitude (ATT) to measure participants’ willingness to incorporate the device into their current or future daily activities, 3) Facilitating Conditions (FC) to identify comprehension of the interaction strategy, 4) Perceived Enjoyment (PENJ) to assess preferences regarding the interaction strategy, 5) Perceived Ease of Use (PEOU) to evaluate intuitiveness, complexity, and communication, and 6) Social Presence (SP) to analyse social interaction skills, perceived intelligence, and engagement preferences. Responses to the questions were asked using a 5-point Likert scale ranging from “completely disagreed” to “completely agreed”. Statistical analysis employed the Mann–Wilcoxon (MWW) test to determine the presence of significant differences between high and low levels of interactionR1.
Lastly, the open-ended questionnaire aimed to identify participants’ overall preferences for a specific level of social engagement and gather impressions regarding missing features, features to eliminate, and features requiring modification.
The experimental protocol was registered with the University’s ethical committee and approved in a timely manner. All participants read and signed the informed consent document. After sessions, videos/data were removed from the external camera used to record them and uploaded to a safe storage location in the University’s cloud drive, following the University’s data protection guidelines.
Data were collected from a total of 28 trials. All test were entirely conducted with no collisions or falls. As an illustration of the interaction with the high level of social engagement, Figure 3 depicts several moments of a trial with one of the users.
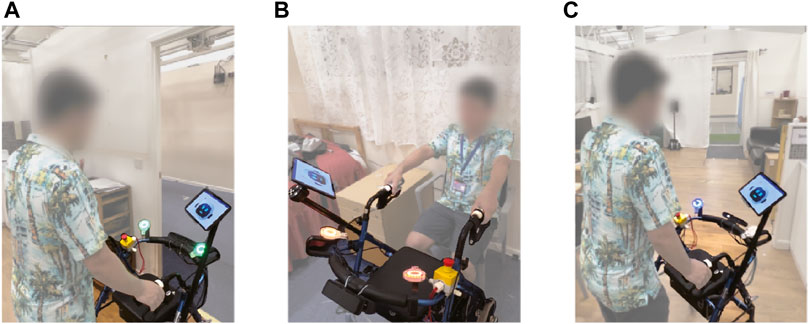
Figure 3. Experiment illustration. (A) Smart walker during greeting and ready state. (B) Smart walker assisting sit-to-stand. (C) Smart walker providing indoor guidance with left LED.Ed.
Employing the sensor interface integrated into the Socially Assistive Walker (SAW), the platform operator was able to gather environmental, kinematic, and kinetic indicators from the user. The operator used this information to assess the system states and properly trigger the feedback behaviours. The following results showcase the physical interaction parameters from a single user to demonstrate the outputs of the sensor interface.
On the one hand, to maintain users’ safety, collect environmental data related to the walker’s position within the experimental setup, provide safe guiding, and track users’ motion, the interface sensors fed the ROS navigation stack to process laser scanners data into inflated obstacles, plan paths or routes within the experimental setup, and provide autonomous localisation. Figure 4 illustrates the presented information to the external operator.
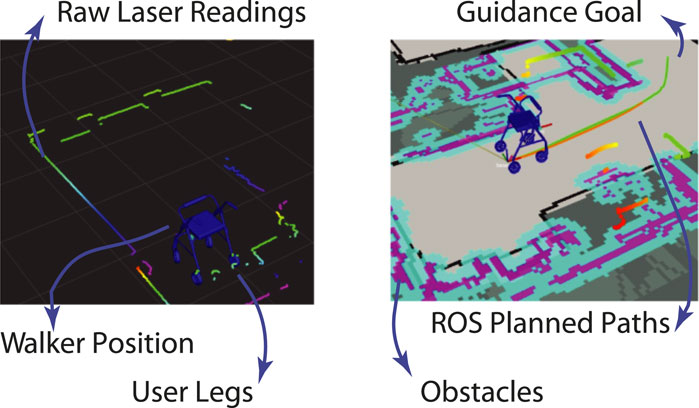
Figure 4. Illustration of environment information used by the ROS navigation stack. (A) Raw acquisitions from the laser scanners. (B) Processed obstacles and generated paths.
On the other hand, to track users’ posture during sit-to-stand and stand-to-sit transfers, as well as to trigger information cues during the food reminder task, the device’s camera was used to track the upper body of the user using Google’s mediapipe solutions (Google Developers Team, 2023). Figure 5 illustrates the annotated image obtained after passing the camera video stream through the mediapipe’s posture model. This information allowed the external operator to track whether the user was looking at the screen or not, the exact moment when the user follow posture corrections, as well as sitting and standing instructions.
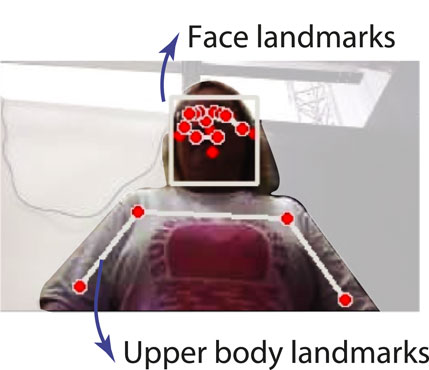
Figure 5. Illustration of posture tracking by Google’s Mediapipe pre-trained model.
Regarding physical interaction, the sensors on the handles provide pressure information about the user’s gripping. The collected data with the Force Resistive Sensors (FSRS) was used to track the user’s walking pattern, brake activation, and weight support on the frame. Figure 6 illustrates the acquired signals between the session’s start and the stand-to-sit task’s end. Several states are indicated according to the behaviour of the right handle signal.
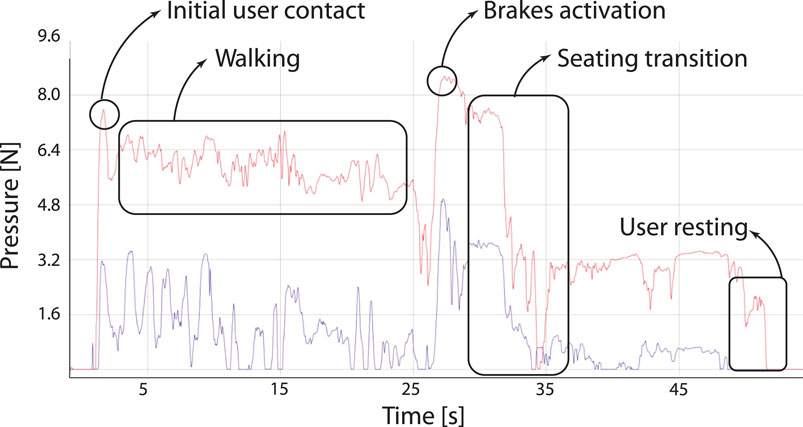
Figure 6. Illustration of the sit-to-stand task and the acquired signals with FSRs placed on the walker’s handles. The left signal is illustrated in blue colour, and the right signal in red colour.
The validation group was conformed by 14 volunteers without gait assistance requirements or cognitive disorders (11 males, three females,
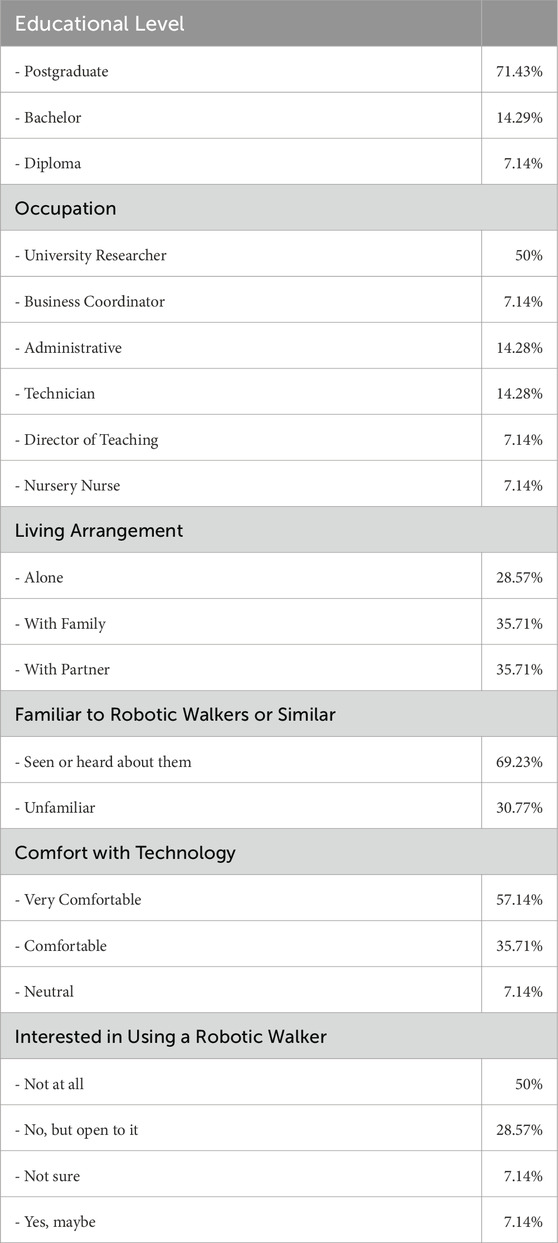
Table 3. Demographic data of the participants.
Regarding the perception results, Figure 7 illustrates the response distribution for the social engagement levels at each qualitative category. Similarly, the p-value is shown, highlighting the categories with significant differences between social engagement levels. The Anxiety (ANX) questions aimed to assess the perceived fear of breaking or making mistakes with the device. The answers for this category were mainly negative, and no significant differences were found. This result is expected since the device’s design followed recommendations and insights from the semi-structured interviews with healthcare experts to ensure it is perceived as a non-complex technology. Regarding the Attitude (ATT) category, primarily positive answers were obtained for both social engagement levels. However, significant differences were received, with the high level having a slightly more positive distribution. In general, these questions sought to determine if the particular version of the robotic walker could be useful in improving daily living activities. Thus, this result might be driven by the embodiment and verbal cues programmed in the high level of interaction.
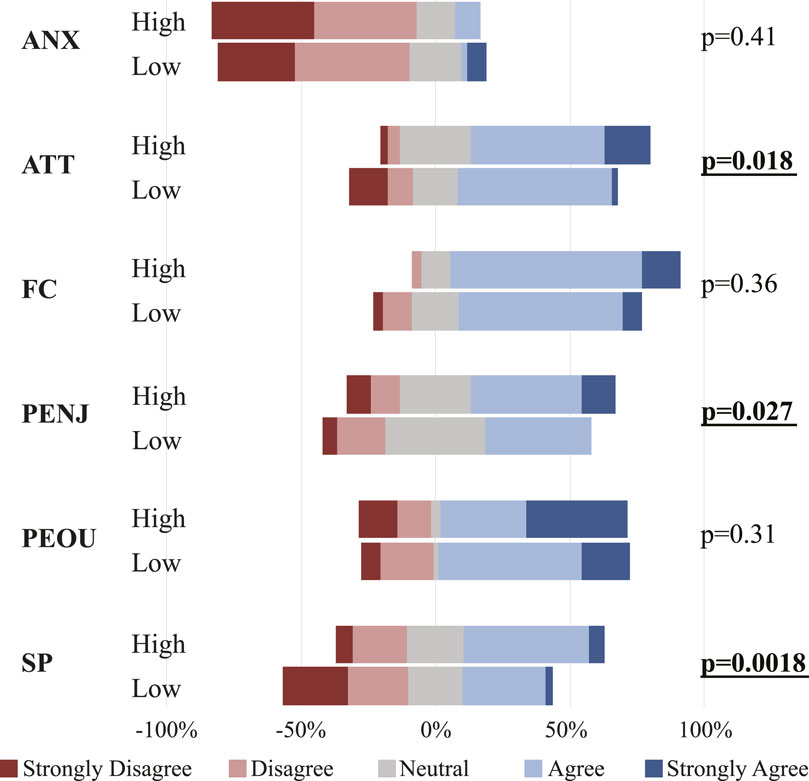
Figure 7. Distribution of the answers of the qualitative questionnaire by interaction mode, i.e., high vs. low. Anxiety (ANX). Attitude (ATT). Facilitating Conditions (FC). Perceived Enjoyment (PENJ). Perceived Ease of Use (PEOU). Social Presence (SP). p-values in bold indicate significant differences between high and low interaction modes.
Regarding the Facilitating Conditions (FC), such questions evaluated whether the users understood and had enough training to properly use the robotic walker. In this case, responses with predominant positive distributions were obtained, and no significant differences were found. This outcome suggests that despite the interaction level, the users could properly understand the instructions and communication from the device. In regards to the Perceived Enjoyment (PENJ), this category was aimed at determining if the users enjoyed the interaction channels employed by the device under each level of interaction. Interestingly, positive distributions were obtained for the two levels of interaction, and significant differences were found. In particular, the high level of social engagement exhibited a more positive distribution, suggesting that the participants showed a greater preference and enjoyment for it compared to the low level of interaction.
Looking at the Perceived Ease of Use (PEOU), the proposed questions sought to assess intuitiveness, interaction naturalness (i.e., simple communication), and technological simplicity. In this case, both levels of interaction showed positive distributions with no significant differences between them. This result could be attributed to the overall design of the social robotic walker, which is perceived as an easy-to-use device regardless of the feedback or interaction cues. Finally, the Social Presence (SP) category was designed to identify whether the users perceived differences in terms of being assisted by real agent, the preference for the communication strategies, the number of social interaction skills, and the perception of the device as an intelligent agent. In this case, more positive responses were obtained under the high level of interaction, with significant differences between the levels. These results suggest that users were able to identify the most significant social presence with the high mode, and their preference was shifted to it.
Considering that this study was conducted with healthy adults, one of the objectives of the final questionnaire (i.e., applied after experiencing both levels) was to determine the expected potential and applicability of the proposed device in older adults with physical or cognitive impairments. It is important to acknowledge that 50% of participants expressed no interest in using a robotic walker, as indicated in Table 3. This lack of interest may introduce a bias in the data, as it reflects the views of a subset of participants who do not see the immediate need for such a device. This perception likely stems from the fact that these participants do not currently require a robotic walker to carry out their daily activities. However, this does not necessarily reflect the overall efficacy or necessity of the device. Particularly,R1 93% of the participants stated that the proposed solution would be able to assist the activities of daily living to older adults, of which 100% mentioned that at least one older relative (e.g., parents) could benefit from the social robotic walker at the time of the study.
Furthermore, to validate the findings of the perception questionnaires, the participants were asked if they noticed differences between the trials. In this case, all of the users noticed differences, and the 78% preferred the high interaction level, the 14% preferred the low interaction level, and the 7% suggested a combination of them. Regarding the attributes perceived by the participants, Figure 8 illustrates those assigned to each mode when the users preferred each mode. As shown in the figure, the attributes underscored for the high level of interaction were primarily positive, stating its friendliness, intuitive interaction, and the usefulness of the embodiment (e.g., face and voice). Similarly, the participants noticed that the high level of interaction was less distracting due to not needing to read texts from the tablet and the location of it. Regarding the low level of interactions, the users that preferred this mode highlighted that it was faster, not repetitive or annoying, and particularly not fake. The users mentioned that the high mode tended to overreact or to be excessively encouraging during simple tasks.
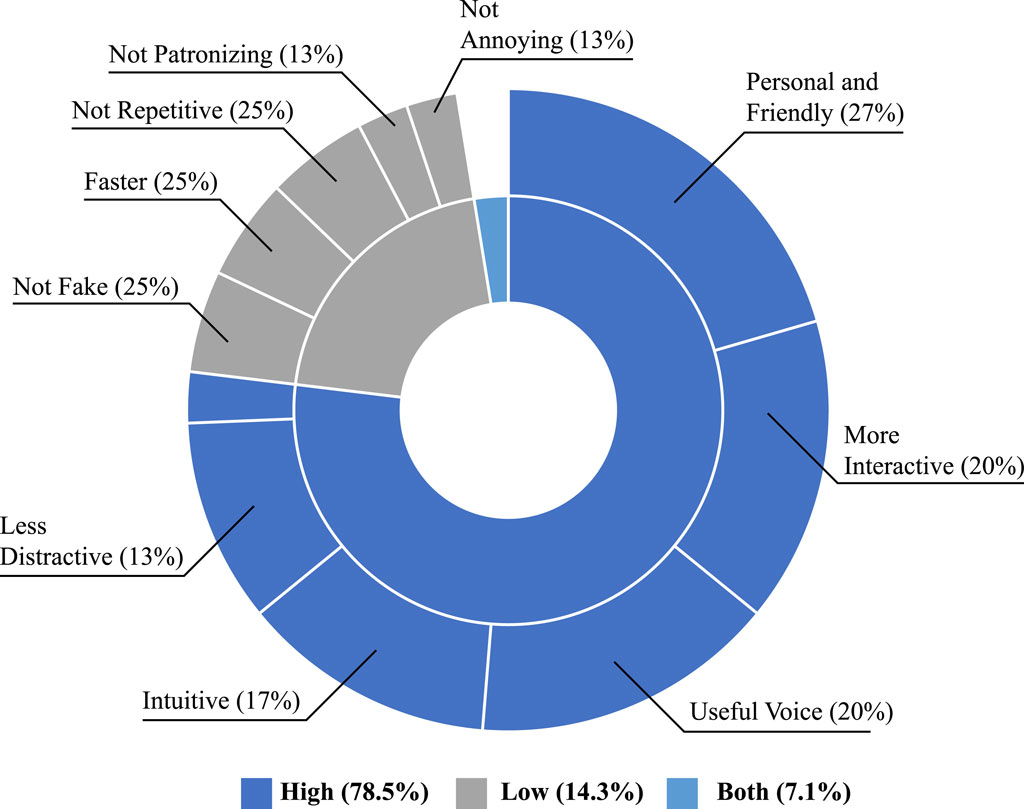
Figure 8. Perceived qualitative attributes and users’ preference. Inner ring shows the percentage of users that preferred each interaction level. Outer ring shows the perceived attributes by the users who preferred each mode.
Finally, participants’ feedback suggested several potential enhancements, removals, and modifications to the walker’s design. To enhance user experience, it was recommended to add features such as suspension for navigating small bumps, combining modes for improved usability, providing detailed information about braking and real-time notifications, incorporating haptic feedback and collision warnings, and enabling automatic brakes during fast walking or sit-to-stand transitions. Additionally, participants preferred more interactivity, biofeedback for heart rate, lights for nighttime guidance, and the ability to play music and count steps. On the other hand, to streamline the design, participants suggested removing features such as the camera to reduce intrusiveness, avoid chirpy voice tones, remove repetitive prompts or notification sounds, and modulate flashing lights, considering potential sensitivities. The suggested modifications include adjusting the screen placement for safety, managing LED brightness, raising indicators for better visibility, offering a variety of verbal expressions, and providing customisation in terms of voices, language, humour level, colours, and features. These insights provide valuable input for refining the walker’s design to align more closely with user preferences and needs.
Despite the promising results, several limitations should be acknowledged. First, the study’s sample size was relatively small, consisting of 14 participants. While this sample size was adequate for qualitative insights and initial feedback, larger-scale studies are needed to confirm the generalisation of these findings across broader populations and diverse geographical regions. Second, the study primarily focused on healthcare professionals and experts in geriatric care. While their insights were valuable for informing the design criteria of the SAW, future research should also include direct input from older adults themselves and their caregivers to ensure the device meets their specific needs and preferences. Third, the study duration was limited, and longer-term assessments are needed to evaluate the sustained usability and acceptance of the SAW over extended periods. Longitudinal studies would provide valuable insights into how user interactions with the device evolve over time and its impact on their daily lives.R1 Fourth, rollator users sometimes have visual impairments or physical limitations, which can affect their ability to control the walker and may lead to collisions, damaging components such as tablets, speakers, or cameras. It is important to note that this study presents a first prototype of a socially assistive walker. As such, the current prototype may not fully address all challenges faced by users with diverse needs and abilities. Future iterations of the prototype will focus on enhancing user interaction design, integrating robust collision avoidance mechanisms, and ensuring the durability of external components.R2
This study collected data from adults interacting with a Socially Assistive Walker (SAW) during daily living activities. The device was designed based on the findings of semi-structured interviews with ageing experts, and two levels of social engagement or interaction were designed to assess users’ preferences. The high level of social engagement demonstrated its effectiveness in interaction, as illustrated in Figure 7, being preferred by most users. The validation group provided valuable insights regarding future modifications of the device’s design. These mainly focused on tailoring the interaction by providing customisation options to the virtual agent regarding voice tones, language tone, feedback modes, and appearance.
Furthermore, given that one of the design criteria that resulted from the interviews was avoiding over-complex interactions, automatic brakes, haptic feedback, and speech interaction were not included in this device version. However, the users suggested adding these features with the possibility of configuring them to meet specific user needs. In terms of the potential impact on the target population, even though they were particularly interested in using them (i.e., healthy adults), they found the device easy to use regardless of the interaction mode. They suggested its usefulness for older adults with physical and cognitive impairments like dementia.
Future work will assess the suggestions for improvement collected from the current study, and the obtained results will be re-evaluated by ageing experts. The next version of the robotic device will be redesigned bearing in mind these findings, and it will be deployed for mid- to long-term assessment in care homes or residential settings. Moreover, analysing which pathologies could benefit from features like integrated tablets or LED rings is essential to assess usability, safety, and impact on fall risk. Future research should prioritise testing and validating the SAW features with diverse pathologies to understand their real contributions.R2
Future research will also focus on assessing the familiarity and long-term usability of the selected SAW among potential users. Recognising that acceptance and positive feelings towards assistive technologies often improve with prolonged exposure, we propose extended studies where users interact with the SAW in their daily lives over several months. This will help to assess how familiarity with the device affects user acceptance and overall satisfaction. Additionally, future work will evaluate the effectiveness of the SAW’s sensors and feedback mechanisms in real-world settings, monitoring usage patterns and gathering feedback on daily interactions to optimise the device further.R1
The original contributions presented in the study are publicly available. This data can be found here: https://doi.org/10.6084/m9.figshare.25393525.v1
The studies involving humans were approved by University of the West of England’ ethics committee. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study. Written informed consent was obtained from the individual(s) for the publication of any potentially identifiable images or data included in this article.
SS.: Investigation, Methodology, Software, Visualization, Writing–original draft, Writing–review and editing. NH: Conceptualization, Methodology, Validation, Writing–original draft, Writing–review and editing. MM: Conceptualization, Funding acquisition, Investigation, Methodology, Supervision, Validation, Writing–original draft, Writing–review and editing. CC: Conceptualization, Funding acquisition, Investigation, Project administration, Resources, Supervision, Writing–original draft, Writing–review and editing.
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This work was funded by the Medical Research Council [grant number MR/Y010620/1], and partially supported by the EPSRC Centre for Doctoral Training in Robotics and Autonomous Systems (FARSCOPE).
The authors would like to thank the members of the Bristol Robotics Laboratory for supporting this research. Likewise, they would like to thank the geriatric experts and the adult participants, without whom this work would not have been possible.
The authors declare that the research was conducted without any commercial or financial relationships that could potentially create a conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Alonso, S. G., Hamrioui, S., de la Torre Díez, I., Cruz, E. M., López-Coronado, M., and Franco, M. (2019). Social robots for people with aging and dementia: a systematic review of literature. Telemedicine e-Health 25, 533–540. doi:10.1089/tmj.2018.0051
Auvinet, B., Touzard, C., Montestruc, F., Delafond, A., and Goeb, V. (2017). Gait disorders in the elderly and dual task gait analysis: a new approach for identifying motor phenotypes. J. NeuroEngineering Rehabilitation 14, 7. doi:10.1186/s12984-017-0218-1
Bajones, M., Fischinger, D., Weiss, A., Wolf, D., Vincze, M., de la Puente, P., et al. (2018). Hobbit: providing fall detection and prevention for the elderly in the real world. J. Robotics 2018, 1–20. doi:10.1155/2018/1754657
Bardaro, G., Antonini, A., and Motta, E. (2022). Robots for elderly care in the home: a landscape analysis and co-design toolkit. Int. J. Soc. Robotics 14, 657–681. doi:10.1007/s12369-021-00816-3
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., and Tanaka, F. (2018). Social robots for education: a review. Sci. Robotics 3, eaat5954. doi:10.1126/scirobotics.aat5954
Bradwell, H. L., Edwards, K. J., Winnington, R., Thill, S., and Jones, R. B. (2019). Companion robots for older people: importance of user-centred design demonstrated through observations and focus groups comparing preferences of older people and roboticists in south west england. BMJ Open 9, e032468. doi:10.1136/bmjopen-2019-032468
Céspedes, N., Irfan, B., Senft, E., Cifuentes, C. A., Gutierrez, L. F., Rincon-Roncancio, M., et al. (2021). A socially assistive robot for long-term cardiac rehabilitation in the real world. Front. Neurorobotics 15, 633248. doi:10.3389/fnbot.2021.633248
Ding, D.-M., Wang, Y.-G., Zhang, W., and Chen, Q. (2022). Fall detection system on smart walker based on multisensor data fusion and sprt method. IEEE Access 10, 80932–80948. doi:10.1109/ACCESS.2022.3195674
Donovan, N. J., and Blazer, D. (2020). Social isolation and loneliness in older adults: review and commentary of a national academies report. Am. J. Geriatric Psychiatry 28, 1233–1244. doi:10.1016/j.jagp.2020.08.005
Dosso, J. A., Bandari, E., Malhotra, A., Guerra, G. K., Hoey, J., Michaud, F., et al. (2022). User perspectives on emotionally aligned social robots for older adults and persons living with dementia. J. Rehabilitation Assistive Technol. Eng. 9, 205566832211083. doi:10.1177/20556683221108364
Dosso, J. A., Kailley, J. N., Guerra, G. K., and Robillard, J. M. (2023). Older adult perspectives on emotion and stigma in social robots. Front. Psychiatry 13, 1051750. doi:10.3389/fpsyt.2022.1051750
Ferrari, F., Divan, S., Guerrero, C., Zenatti, F., Guidolin, R., Palopoli, L., et al. (2020). Human–robot interaction analysis for a smart walker for elderly: the acanto interactive guidance system. Int. J. Soc. Robotics 12, 479–492. doi:10.1007/s12369-019-00572-5
Getson, C., and Nejat, G. (2022). The adoption of socially assistive robots for long-term care: during covid-19 and in a post-pandemic society. Healthc. Manag. Forum 35, 301–309. doi:10.1177/08404704221106406
Google Developers Team (2023). Google mediapipe pose: Real-time human pose estimation. Available at: https://developers.google.com/mediapipe/solutions/guide.
Gross, H.-M., Mueller, S., Schroeter, C., Volkhardt, M., Scheidig, A., Debes, K., et al. (2015). Robot companion for domestic health assistance: implementation, test and case study under everyday conditions in private apartments. IEEE, 5992–5999. doi:10.1109/IROS.2015.7354230
Guamushig-Laica, J., Jerez-Gavilánez, M., Mendoza-Chipantasi, D., and Mariño-Salguero, J. (2022). Indoor smart walker based on artificial vision for the autonomous movement of seniors with mobility problems and reduced vision. Cham: Springer, 69–83. doi:10.1007/978-3-030-99170-8_6
Heerink, M., Kröse, B., Wielinga, B., and Evers, V. (2009). Measuring the influence of social abilities on acceptance of an interface robot and a screen agent by elderly users, 430–439. doi:10.1145/1671011.1671067
Hirt, J., Ballhausen, N., Hering, A., Kliegel, M., Beer, T., and Meyer, G. (2021). Social robot interventions for people with dementia: a systematic review on effects and quality of reporting. J. Alzheimer’s Dis. 79, 773–792. doi:10.3233/JAD-200347
Horstmann, A. C., and Krämer, N. C. (2020). Expectations vs. actual behavior of a social robot: an experimental investigation of the effects of a social robot’s interaction skill level and its expected future role on people’s evaluations. PLOS ONE 15, e0238133. doi:10.1371/journal.pone.0238133
Hunter, S. W., Divine, A., Omana, H., Wittich, W., Hill, K. D., Johnson, A. M., et al. (2019). Effect of learning to use a mobility aid on gait and cognitive demands in people with mild to moderate alzheimer’s disease: Part ii – 4-wheeled walker. J. Alzheimer’s Dis. 71, S115–S124. doi:10.3233/JAD-181170
Leonardsen, A.-C. L., Hardeland, C., Helgesen, A. K., Bååth, C., del Busso, L., and Grøndahl, V. A. (2023). The use of robotic technology in the healthcare of people above the age of 65—a systematic review. Healthcare 11, 904. doi:10.3390/healthcare11060904
Łukasik, S., Tobis, S., Kropińska, S., and Suwalska, A. (2020). Role of assistive robots in the care of older people: survey study among medical and nursing students. J. Med. Internet Res. 22, e18003. doi:10.2196/18003
Lundberg, C. L., Sevil, H. E., Behan, D., and Popa, D. O. (2022). Robotic nursing assistant applications and human subject tests through patient sitter and patient walker tasks. Robotics 11, 63. doi:10.3390/robotics11030063
Luz, C., Bush, T., and Shen, X. (2015). Do canes or walkers make any difference? nonuse and fall injuries. Gerontologist 57, 211–218. doi:10.1093/geront/gnv096
Maresova, P., Javanmardi, E., Barakovic, S., Husic, J. B., Tomsone, S., Krejcar, O., et al. (2019). Consequences of chronic diseases and other limitations associated with old age – a scoping review. BMC Public Health 19, 1431. doi:10.1186/s12889-019-7762-5
Medrano, R. L., Thomas, G. C., Margolin, D., and Rouse, E. J. (2023). The economic value of augmentative exoskeletons and their assistance. Commun. Eng. 2, 43. doi:10.1038/s44172-023-00091-2
Moyle, W., Jones, C., Cooke, M., O’Dwyer, S., Sung, B., and Drummond, S. (2014). Connecting the person with dementia and family: a feasibility study of a telepresence robot. BMC Geriatr. 14, 7. doi:10.1186/1471-2318-14-7
Nauta, J., Mahieu, C., Michiels, C., Ongenae, F., Backere, F. D., Turck, F. D., et al. (2019). Pro-active positioning of a social robot intervening upon behavioral disturbances of persons with dementia in a smart nursing home. Cognitive Syst. Res. 57, 160–174. doi:10.1016/j.cogsys.2019.03.002
Office for National Statistics (2018). Living longer: how our population is changing and why it matters. Online.
Onyeulo, E. B., and Gandhi, V. (2020). What makes a social robot good at interacting with humans? Information 11, 43. doi:10.3390/info11010043
Paetzel, M., Perugia, G., and Castellano, G. (2020). The persistence of first impressions. ACM, 73–82. doi:10.1145/3319502.3374786
Piau, A., Krams, T., Voisin, T., Lepage, B., and Nourhashemi, F. (2019). Use of a robotic walking aid in rehabilitation to reduce fear of falling is feasible and acceptable from the end user’s perspective: a randomised comparative study. Maturitas 120, 40–46. doi:10.1016/j.maturitas.2018.11.008
Pirker, W., and Katzenschlager, R. (2017). Gait disorders in adults and the elderly. Wien. Klin. Wochenschr. 129, 81–95. doi:10.1007/s00508-016-1096-4
Rico, F. M., Rodríguez-Lera, F. J., Clavero, J. G., Ángel, M.G.-H., and Olivera, V. M. (2020). An acceptance test for assistive robots. Sensors 20, 3912. doi:10.3390/s20143912
Rubagotti, M., Tusseyeva, I., Baltabayeva, S., Summers, D., and Sandygulova, A. (2022). Perceived safety in physical human–robot interaction—a survey. Robotics Aut. Syst. 151, 104047. doi:10.1016/j.robot.2022.104047
Sierra M., S. D., Arciniegas-Mayag, L., Ramos, O., Maldonado, J., Múnera, M., and Cifuentes, C. A. (2022). “Kinematics, Actuation, and Sensing Architectures for Rehabilitation and Assistive Robotics,” in Interfacing Humans and Robots for Gait Assistance and Rehabilitation, eds. C. A. Cifuentes, and M. Múner (Berlin: Springer), 43–92. doi:10.1007/978-3-030-79630-3_2
Sierra M., S. D., Garzón, M., Múnera, M., and Cifuentes, C. A. (2019). Human–robot–environment interaction interface for smart walker assisted gait: agora walker. Sensors 19, 2897. doi:10.3390/s19132897
Sierra M., S. D., Otálora, S., Arias-Castro, M. C., Gómez-Rodas, A., Múnera, M., Múnera, M., et al. (2021). Assessment of a robotic walker in older adults with Parkinson’s disease in daily living activities. Front. Neurorobotics 15, 742281. doi:10.3389/fnbot.2021.742281
Soufineyestani, M., Imtiaz, N., and Khan, A. (2021). Assistive robots designed for eldery care and caregivers. Int. J. Robotics Control 3, 1. doi:10.5430/ijrc.v3n1p1
Stegner, L., and Mutlu, B. (2022). Designing for caregiving: integrating robotic assistance in senior living communities (ACM), 1934–1947. doi:10.1145/3532106.3533536
Tan, H., Zhao, Y., Li, S., Wang, W., Zhu, M., Hong, J., et al. (2020). Relationship between social robot proactive behavior and the human perception of anthropomorphic attributes. Adv. Robot. 34, 1324–1336. doi:10.1080/01691864.2020.1831699
Thies, S. B., Bates, A., Costamagna, E., Kenney, L., Granat, M., Webb, J., et al. (2020). Are older people putting themselves at risk when using their walking frames? BMC Geriatr. 20, 90. doi:10.1186/s12877-020-1450-2
United Nations, D. o. E., and Social Affairs, P. D. (2020). World population ageing 2019. Tech. Rep. ST/ESA/SER.A/444.
Venkatesh, V., Thong, J. Y., and Xu, X. (2012). Consumer acceptance and use of information technology: extending the unified theory of acceptance and use of technology. MIS Q. 36, 157–178. doi:10.2307/41410412
Verdezoto, G., Ballesteros, J., and Urdiales, C. (2022). Smart rollators aid devices: current trends and challenges. IEEE Trans. Human-Machine Syst. 52, 1103–1110. doi:10.1109/THMS.2022.3202558
Veríssimo, J., Verhaeghen, P., Goldman, N., Weinstein, M., and Ullman, M. T. (2021). Evidence that ageing yields improvements as well as declines across attention and executive functions. Nat. Hum. Behav. 6, 97–110. doi:10.1038/s41562-021-01169-7
Werner, C., Geravand, M., Korondi, P. Z., Peer, A., Bauer, J. M., and Hauer, K. (2020). Evaluating the sit-to-stand transfer assistance from a smart walker in older adults with motor impairments. Geriatrics and Gerontology Int. 20, 312–316. doi:10.1111/ggi.13874
Winkle, K., Caleb-Solly, P., Leonards, U., Turton, A., and Bremner, P. (2021). Assessing and addressing ethical risk from anthropomorphism and deception in socially assistive robots (ACM), 101–109. doi:10.1145/3434073.3444666
Woods, D., Yuan, F., Jao, Y.-L., and Zhao, X. (2021). Social robots for older adults with dementia: a narrative review on challenges and future directions, 411–420. doi:10.1007/978-3-030-90525-5_35
Keywords: socially assistive walker, ageing population, healthcare robotics, activities of daily living, user preference
Citation: Sierra M. SD, Harris N, Múnera M and Cifuentes CA (2024) Socially assistive walker for daily living assistance in older adults. Front. Robot. AI 11:1401663. doi: 10.3389/frobt.2024.1401663
Received: 15 March 2024; Accepted: 19 July 2024;
Published: 16 August 2024.
Edited by:
Markus Vincze, Vienna University of Technology, AustriaReviewed by:
M. Encarna Micó-Amigo, Newcastle University, United KingdomCopyright © 2024 Sierra M., Harris, Múnera and Cifuentes. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Carlos A. Cifuentes, Y2FybG9zLmNpZnVlbnRlc0B1d2UuYWMudWs=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.