 Bahar Irfan
Bahar Irfan Sanna Kuoppamäki
Sanna Kuoppamäki Gabriel Skantze
Gabriel Skantze- 1Division of Speech, Music and Hearing, KTH Royal Institute of Technology, Stockholm, Sweden
- 2Division of Health Informatics and Logistics, KTH Royal Institute of Technology, Stockholm, Sweden
Companion robots are aimed to mitigate loneliness and social isolation among older adults by providing social and emotional support in their everyday lives. However, older adults’ expectations of conversational companionship might substantially differ from what current technologies can achieve, as well as from other age groups like young adults. Thus, it is crucial to involve older adults in the development of conversational companion robots to ensure that these devices align with their unique expectations and experiences. The recent advancement in foundation models, such as large language models, has taken a significant stride toward fulfilling those expectations, in contrast to the prior literature that relied on humans controlling robots (i.e., Wizard of Oz) or limited rule-based architectures that are not feasible to apply in the daily lives of older adults. Consequently, we conducted a participatory design (co-design) study with 28 older adults, demonstrating a companion robot using a large language model (LLM), and design scenarios that represent situations from everyday life. The thematic analysis of the discussions around these scenarios shows that older adults expect a conversational companion robot to engage in conversation actively in isolation and passively in social settings, remember previous conversations and personalize, protect privacy and provide control over learned data, give information and daily reminders, foster social skills and connections, and express empathy and emotions. Based on these findings, this article provides actionable recommendations for designing conversational companion robots for older adults with foundation models, such as LLMs and vision-language models, which can also be applied to conversational robots in other domains.
1 Introduction
Robots in elderly care are increasingly targeted towards not only fulfilling practical needs, such as medication reminders or physical assistance, but also as companions to prevent and mediate loneliness through offering social and emotional support in their everyday lives, thus enhancing the psychological wellbeing of users (Banks et al., 2008; Robinson et al., 2013; Pu et al., 2018). Research in companion robots for older adults focused primarily on pet robots, such as PARO (a seal-shaped robot), that do not have natural language processing (NLP) or generation capabilities (Pu et al., 2018). One of the underlying reasons is the limitations in NLP technology, leading to heavy reliance on humans to control robots, either through telepresence or the Wizard of Oz technique (Kelley, 1984) to give the illusion that the robot is autonomous, or by rule-based architectures that allow one-way transactional (e.g., providing medication reminders) interactions or small talk that are not suitable for daily dialogues with older adults.
The recent introduction of “foundation models”, i.e., deep learning models, such as BERT (Devlin et al., 2019), GPT-3 (Brown et al., 2020), DALL-E (Ramesh et al., 2021), and CLIP (Radford et al., 2021), that are trained on broad data (often through self-supervision) that can be applied in or adapted to a wide range of downstream tasks, transformed the scope of what is achievable in many robotics applications (Bommasani et al., 2022). Most prominently, large language models (LLMs) enabled the development of companion robots with social skills due to their ability to process and produce language in an open-domain manner, without restriction on topics or concepts. Recent work incorporated LLMs for open-domain dialogue with robots in therapy (Lee et al., 2023), service (Cherakara et al., 2023), and elderly care (Irfan et al., 2023) domains, revealing their strengths and weaknesses in multi-modal contexts across diverse application areas. These studies underscore the versatility of LLMs in facilitating human-robot interaction (HRI).
Integrating LLMs into human-robot interaction requires awareness of the user’s perceptions, needs, and preferences to ensure that these robots are aligned with human values and can successfully be employed in real-life contexts. Alignment techniques like reinforcement learning with human feedback can improve some model capabilities, but it is unlikely that an aggregate fine-tuning process can adequately represent the full range of users’ preferences and values (Kirk et al., 2023). Participatory design (co-design) approaches enable incorporating these aspects into the design process of robots, through focus groups, interviews, concept generation and design activities, prototyping, and interactions with designed robots (Šabanović, 2010; Frennert and Östlund, 2014). These studies investigate HRI as a relational and social phenomenon, where contextual factors and longitudinal effects alter the interactions with the robot (Bradwell et al., 2020; Søraa et al., 2023). An emphasis is based on how robots are shaped in interaction with the wider socio-cultural and physical environment into which robots are introduced. Against this background, it becomes important to explore the shared understanding of companion robots for open-domain dialogue, which influences the expectations, values, norms, and possible contradictions that older adults have towards companion robots.
This study investigates older adults’ expectations towards conversational companion robots to provide social and emotional support in their daily lives, and provides design recommendations on how to achieve these expectations through foundation models. Participatory design workshops were conducted with 28 Swedish-speaking older adults, aged 65 and over (Figure 1). The workshops involved a demonstration of open-domain dialogue with an autonomous Furhat robot employing an LLM (GPT-3.5 text-davinci-003), and (6-8 participant) focus group discussions deriving from conversational design scenarios that can occur in their everyday lives. The contributions of this article encompass two key aspects:
1. Through a qualitative approach, identifying socially shared expectations of older adults regarding conversational companion robots for everyday life (Section 4, summarized in Table 1),
2. Formulate actionable design recommendations for integrating foundation models into these robots to meet these expectations, focusing on LLMs for their advanced linguistic capabilities, combined with vision-language models and other state-of-the-art technology for multi-modal aspects (Section 5).

Figure 1. Participatory design workshop with older adults.
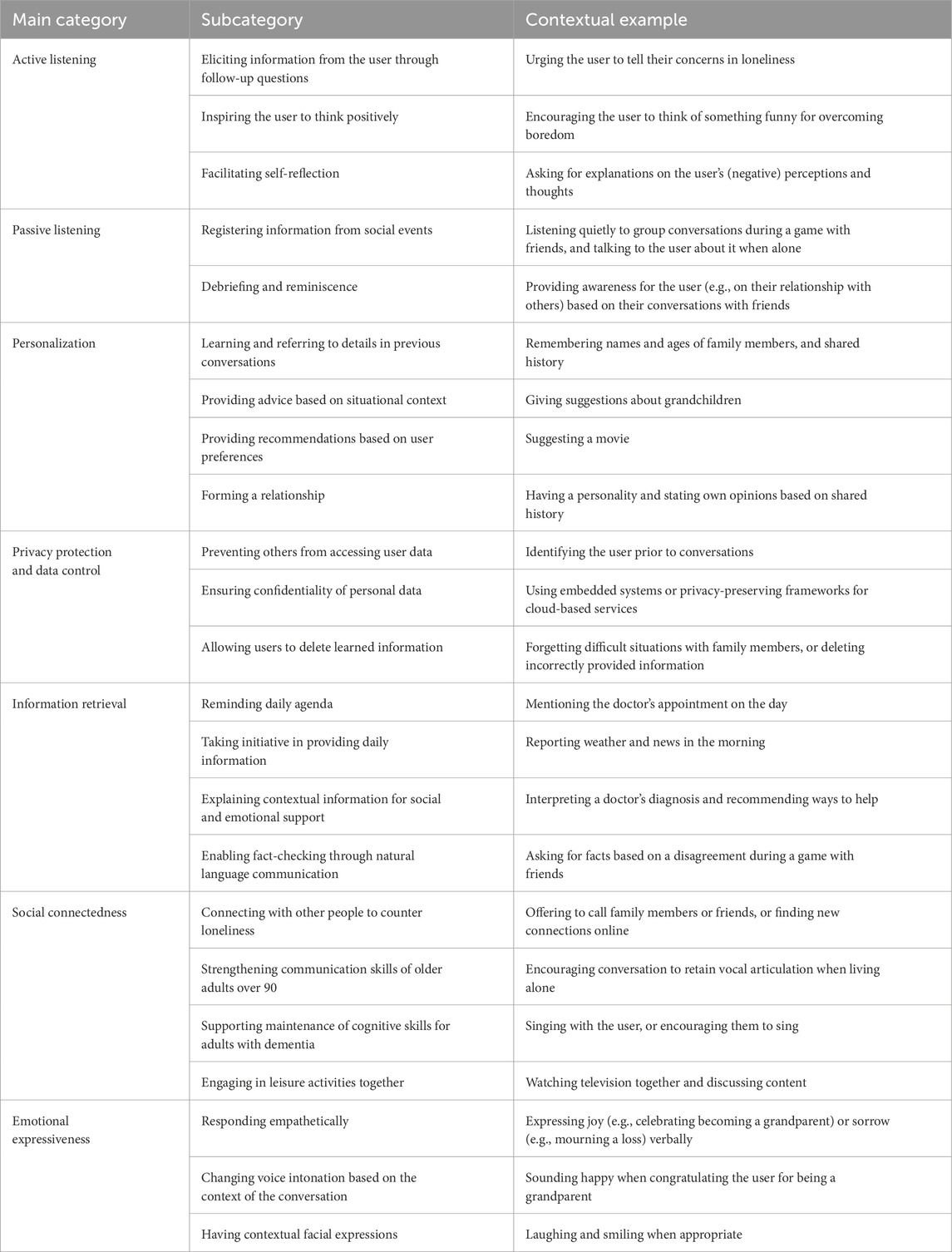
Table 1. Older adults’ expectations towards companion robots for open-domain dialogue.
2 Background
2.1 Companion robots for older adults
Companion robots are socially assistive robots that are designed to respond to the social, emotional, and cognitive needs of older adults and enhance their quality of life, activity, and participation. Studies involving companion robots are focused on the acceptance and use among older adults and caregivers in organizational contexts (e.g., Heerink et al., 2008; Pino et al., 2015), therapeutic effectiveness of companion robots to agitation and anxiety (e.g., Bradwell et al., 2020), and design features of companion robots to promote dignity and autonomy (e.g., Coghlan et al., 2021). A high level of individual differences in willingness to interact and establish a relationship with the companion robot has been observed in older adults (Thunberg et al., 2021). Their acceptance is influenced by functional variables related to social interaction (Heerink et al., 2010), as well as age-related perceptions of their self-image and user-image (Dudek et al., 2021), and individual values and aspirations (Coghlan et al., 2021). Robinson and Nejat (2022) provide a recent overview of the robot types and features used in socially assistive robots for senior care.
Design features of companion robots should reinforce older adults’ autonomy, dignity, and skill level, which often remains a challenge in robot design (Kuoppamäki et al., 2021). Participatory design (co-design) has been proposed as a solution to design more inclusive and suitable companion robots for older adults, and to promote mutual learning between participants and researchers (Lee et al., 2017; Kuoppamäki et al., 2023). This approach takes participants’ self-perceived thoughts and opinions into consideration and highlights factors that influence their attitudes towards robots in developing robot concepts, applications, and interaction modalities. These studies make use of interviews and focus group discussions after having been shown pictures or videos of companion robots (e.g., Søraa et al., 2023), and empirical material collected in real-world settings where older adults get to engage with companion robots for short or longer period of time (e.g., Chang and Šabanović, 2015; Ostrowski et al., 2021).
Due to the lack of a robust solution for open-domain conversation (i.e., conversations that are not limited to any topics) that can arise in the daily lives of older adults, most prior studies that provided recommendations to design companion robots for older adults focused on non-conversational aspects based on robot pets (e.g., Lazar et al., 2016; Bradwell et al., 2019). Only a few studies touched upon the potential for conversational aspects, however, these recommendations did not explore beyond one-way transactional interactions, such as providing medication reminders, exercise, entertainment, and motivation, rather than mutual everyday conversations (e.g., Lee et al., 2017; Thunberg and Ziemke, 2021; Søraa et al., 2023). Other work solely outlined desired high-level functionality rather than providing actionable solutions (e.g., algorithms) on how to achieve the expectations of older adults for companion robots (e.g., Pino et al., 2015; Deutsch et al., 2019; Lin et al., 2020; Bradwell et al., 2021; Gasteiger et al., 2021). In this work, we gather expectations of older adults towards conversational companion robots based on focus groups deriving from everyday situations, in addition to providing concrete suggestions on achieving the desired functionality based on foundation models, such as LLMs and other state-of-the-art architectures, which does not exist in prior work.
Similarly, despite the numerous studies investigating the use of conversational companion robots with older adults, only a few studies have employed autonomous conversational robots for open-domain dialogue (e.g., Sorbello et al., 2016; Kuo et al., 2021; Ostrowski et al., 2022; Khoo et al., 2023). Other studies focused on task-oriented dialogue that gives reminders, answers questions, provides weather reports, and plays games with this age group (e.g., Khosla and Chu (2013); de Graaf et al. (2015); Carros et al. (2020). The earliest study that involved an autonomous conversational robot for older adults was that of Yamamoto et al. (2002). The robot was able to recognize 300 Japanese words for daily greetings and functional commands with 47% accuracy, and respond accordingly. It was evaluated with 7 older adults on an average of 62 days. In contrast, current speech recognition systems can mostly accurately recognize more than 100 languages, with 70%–85%1 accuracy in adult speech (Irfan et al., 2021a) and 60%–80% in children’s speech (Kennedy et al., 2017). All task-oriented dialogue studies used rule-based architectures (i.e., pre-written templates for input and output responses), and only one of the open-domain dialogue studies integrated foundation models (LLMs) into a companion robot (Khoo et al., 2023). Only one study applied co-design in the development of autonomous conversational robots with older adults (Ostrowski et al., 2021). In contrast, our study integrates a foundation model (LLM) into the robot to guide participatory design with older adults and offers corresponding design recommendations to meet those expectations in conversational companion robots.
In real-world applications of companion robots for older adults, there are only a few that are available for purchase, such as non-conversational robot pets (PARO robot seal2 and Joy for All cat and dog robot toys3) and ElliQ conversational desktop robot with a screen (Intuition Robotics4, only available for US customers). To alleviate loneliness, ElliQ proactively provides daily reminders and check-ins for health measures, gives news, weather and sports updates, makes small talk, encourages connection with family and friends, plays music, and offers games and trivia for older adults. It learns from user interactions to personalize its suggestions. However, it is unclear how this learning occurs due to proprietary software, which is updated every 3–4 weeks (Broadbent et al., 2024). The robot was deployed to older adults across 15 programs from various healthcare organizations in the US and Canada since its release in 2022. A study with 173 users who used the robot over 30 days showed that 80% agreed to feel less lonely with the robot. However, despite the effectiveness of proactivity in addressing loneliness (Ring et al., 2013), some users were surprised or annoyed by the proactive features (Broadbent et al., 2024). Other studies supported the negative perceptions of proactive features of the robot, such as being perceived to be talking a lot, threatening their independence, lacking compassion, and being rude, invasive, intrusive, or patronizing (Deutsch et al., 2019; Coghlan et al., 2021).
Previous studies have shown that robots can help combat loneliness in older adults as companions or catalysts for social interactions (Gasteiger et al., 2021). User’s self-perceived loneliness (defined as a subjective experience of lack of social connectedness with other people (Newall and Menec, 2019)) is also positively associated with willingness to buy a robot companion (Ghafurian et al., 2021; Berridge et al., 2023). Nonetheless, older adults tend to think that a companion robot cannot make them feel less lonely (Berridge et al., 2023). These studies, however, have been limited to companion robots with limited or lack of capabilities for having a (open-domain) dialogue with a human. In this study, we analyze older adults’ reflections on conversational companion robots’ roles in their daily lives to provide social and emotional support and alleviate loneliness.
In addition to robots, spoken dialogue agents, such as Amazon Echo, and embodied conversational agents (i.e., virtual agents) that provide task-oriented interactions and small talk were shown to address loneliness in older adults (Loveys et al., 2020; Gasteiger et al., 2021; Jones et al., 2021). However, speech recognition errors and unfamiliarity with spoken dialogue systems (e.g., using a wake word and transactional commands) created adverse user reactions. Older adults did not find valuable use cases for these systems, and considered them as toys, with limited conversational capabilities being the most critical challenge in these systems (Trajkova and Martin-Hammond, 2020; Kim and Choudhury, 2021). In addition, there is extensive literature that shows the benefits of robotic embodiment in improving user perceptions of the agent (Deng et al., 2019). Thus, this study focuses on a companion robot with open-domain dialogue capabilities.
2.2 Foundation models in conversational agents
Prior research initially focused on BERT (Devlin et al., 2019) for dialogue state tracking, intent classification, and response generation (e.g., Dong et al., 2019; Tiwari et al., 2021) primarily in task-oriented dialogue, which is designed for a specific goal, such as restaurant booking. Recently, LLMs (e.g., GPT-3 (Brown et al., 2020), LLaMA (Touvron et al., 2023), Falcon (Penedo et al., 2023), Pythia (Biderman et al., 2023), Mistral (Jiang et al., 2023)) that are trained on vast amounts of textual data, showed promise for generating coherent text and speech by using prompts for inferring the context, thereby, enabling open-domain dialogue with unrestricted topics (Huang et al., 2020). Traditionally, LLMs have been employed within text-based chatbot systems, article generation, code generation, and copywriting (Zhao W. X. et al. (2023) provide an extensive survey of LLMs). On the other hand, multi-modal LLMs (e.g., GPT-4 (OpenAI et al., 2023), Gemini (Reid et al., 2024), see (Li C. et al., 2023) for a review) combine text with audiovisual features to provide end-to-end solutions for dialogue generation in agents.
To date, very few studies have empirically investigated users’ experiences of interacting with LLMs in a companion function for social and emotional support. Ma et al. (2023) explored the benefits and challenges of using LLMs (ChatGPT) for mental wellbeing with a conversational agent to help decrease loneliness by generating friendly or empathetic responses that simulate a conversation with a human therapist. Perceived benefits were increasing accessibility to therapists and the opportunity to receive non-judgmental support in therapy, in addition to improving self-confidence and promoting self-reflection and self-discovery. The main perceived challenges included harmful content, limited dialogue memory capacity, inconsistency in communication style, concerns about dependency on LLMs for mental wellbeing support, and the associated stigma of seeking such support from a virtual agent. For enhancing a user’s wellbeing, a key aspect of the companionship of an agent is to foster closeness, such as trust, warmth, and understanding. This involves sharing personal information, providing support, and engaging in joint activities, all facilitated by verbal and non-verbal cues, like empathy, humor, encouragement, and politeness (Loveys et al., 2022). Jo et al. (2023) leveraged LLMs for a public health intervention in an open-domain chatbot to support socially isolated individuals (middle-aged adults) through check-up phone calls. Users perceived that the system helped mitigate loneliness and provided emotional support through empathetic questions about their health, hobbies, and interests. However, it was perceived as impersonal due to the lack of follow-up questions on past conversations.
While various foundation models are used in robotics for manipulation, navigation, planning, and reasoning (Xiao et al., 2023), only LLMs are used in the context of conversational robots. For instance, LLMs have been used for developing conversational robots with empathetic non-verbal cues (Lee et al., 2023), giving adaptive presentations (Axelsson and Skantze, 2023), functioning as a receptionist (Cherakara et al., 2023; Yamazaki et al., 2023), and supporting wellbeing of older adults (Khoo et al., 2023). Khoo et al. (2023) is the only study that integrated an LLM (fine-tuned GPT-3) into a companion robot for open-domain dialogue with (7) older adults, in addition to our prior work (Irfan et al., 2023). Most participants in that study found the interaction with the robot enjoyable, felt comfortable with it, and perceived it as friendly. However, the individual willingness to use the robot varied among participants, with some suggesting that it might be more suitable for older adults with dementia. However, the study did not incorporate older adults’ perspectives on applying LLMs to companion robots through a co-design approach. In our prior study (Irfan et al., 2023), we investigated the challenges of applying LLMs to conversational robots, deriving from the one-on-one interactions of a robot with LLM with older adults, that were conducted after the discussions in the design scenarios. The challenges were found to be affected by the multi-modal context of conversations with robots that go beyond the textual linguistic capabilities of LLMs, leading to frequent interruptions, repetitive and superficial conversations, language barriers, and confusion due to outdated and incorrect information. In contrast, in this work, we investigate the expectations of older adults using thematic analysis of the focus groups, followed by design recommendations to apply these expectations to conversational companion robots with foundation models.
3 Data and methods
We conducted four participatory design workshops with 28 older adults, aged 65 and over, at the university premises. Each workshop involved 6-8 older adults and lasted 2 h. A Furhat (Al Moubayed et al., 2012) robot employing an LLM (GPT-3.5 text-davinci-003) in a zero-shot fashion, as described in our prior work (Irfan et al., 2023), was used to foster focus group discussions centered around design scenarios that represent situations from older adults’ daily lives. Acapela5 text-to-speech engine in Swedish (Emil22k_HQ) was used for the robot’s voice, and the speech rate was decreased to 80% to facilitate understanding among older adults. In order to understand older adults’ expectations and preferences for companion robots such that we can design robots that align with them, rather than them aligning with the technological limitations of current systems, the robot was only demonstrated autonomously for a brief period (2 min) by a researcher. In other words, the participants did not interact with the robot directly prior to or during the focus group discussions to prevent any biases due to technological limitations.
The study protocol consisted of introducing the study, demonstrating the robot’s capabilities for open-domain dialogue, presenting conversational design scenarios with older adults through videos, and facilitating participants’ expectations, needs, feedback, and shared understandings through focus group discussions to outline design recommendations for companion robots. All workshops were documented with video and audio recordings, and focus group discussions with participants were transcribed to text.
The participants were informed that the study aimed to acquire their feedback, insights, and opinions for developing a companion robot, and were encouraged to share both positive and negative perceptions of the robot for social and emotional support. The robot’s capabilities were demonstrated by a researcher talking to the autonomous robot in an open-domain fashion for 2 min. While the robot’s responses changed slightly due to the LLM (which can generate different responses at run time) in each workshop, the researcher led the conversation to the same topics: participatory design workshop with older adults for designing a companion robot, the robot’s thoughts on robots, and their use in elderly care.
3.1 Design scenarios
We prepared six design scenarios that were demonstrated to participants with images and videos during the workshop6. Videos were adapted based on royalty-free stock video footage7 that do not contain audio or text. In two of the scenarios (S1 and S6), a Furhat robot was integrated into the video8, as shown in Figure 2, to provide better situational context on the robot interaction, whereas for the rest of the scenarios, the participants were asked to imagine talking to the robot after about the described event. Scenarios represented common situations that older adults could face in their everyday lives:
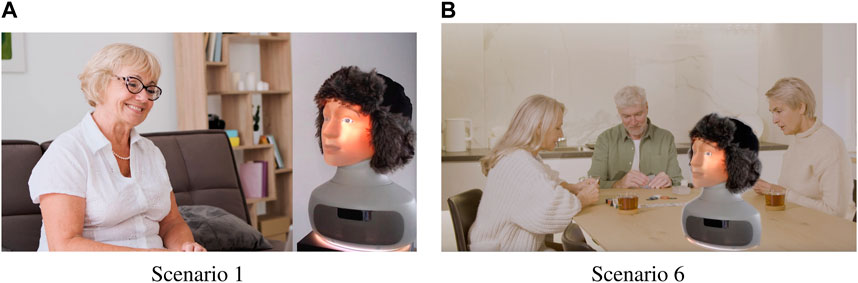
Figure 2. Examples of the design scenarios: (A) Coming home after a family visit, and (B) friends visiting.
S1 An older woman returning home after family (children and grandchildren) visit and talking to the robot about it (Figure 2A).
S2 An older woman sitting in a kitchen alone and looking sad.
S3 An older woman talking on a phone and hearing bad news.
S4 An older woman finds out that her daughter is pregnant.
S5 An older man waking up from bed.
S6 Older adults (two women and a man) playing a card game around the table, where the robot was placed (Figure 2B).
After each scenario, participants were asked questions that were adapted from the Likert scale questions in the Almere model (Heerink et al., 2010) and privacy scale (Malhotra et al., 2004; de Graaf et al., 2019):
S1 Would your family members find the robot fascinating or boring? (Social influence).
S1 Would you like the robot to remember your conversation? (Privacy concern).
S2 Do you think the robot could help you reduce or strengthen the experience of loneliness? (Usefulness).
S3 Do you think the robot could personalize social conversation? (Adaptiveness).
S4 Do you think the robot could robot give you empathetic support? (Usefulness).
S5 Do you think the robot could be a nice conversation partner? (Sociability).
S6 Are you worried about your privacy with the robot? (Privacy concern).
In addition, the participants were asked, “What kind of conversation(s) would you like to have with the robot in this situation?” and “What would you like the robot to say/talk about?” for each scenario except for the final scenario involving interaction with friends, for which they were asked, “How would you like the robot to interact with you and your friends?”. All questions were followed by “why/how/what” based on the participants’ responses, aimed to initiate the discussions in a semi-structured format, leading to open-ended discussions.
Questions asked in the focus group discussions were centered on participants’ perceptions and expectations of using the robot in envisioned social situations and for the provision of social and emotional support. There were no questions regarding whether or not the participants had experienced loneliness themselves. Therefore, the corresponding discussions represent participants’ reflections about using the robot for loneliness prevention among healthy older adults, rather than investigating the effects of using the robot to reduce loneliness.
3.2 Focus group discussions
The presentation of each scenario resulted in vivid discussions in the group, where participants contemplated possible conversational scripts with the robot and shared their first impressions about the companionship function of the robot. Design scenarios were used as an elicitation tool for acquiring “tacit knowledge’” that often may remain hidden and unspoken in social situations (Van Braak et al., 2018). The researchers presented questions to understand the participants’ preferences or self-identified needs and first impressions about the robot for providing social and emotional support in a particular social environment and context. The researchers only contributed to the group discussions when the participants asked them about the capabilities of the robot regarding their suggestions, in which case they responded affirmatively to avoid biasing them with the limitations of the current technology. Focus group discussions lasted approximately 60 min.
3.3 Participants
The participants were recruited through an invitation that described the goal of the project and the activities that will be part of the design workshops. Adults aged 65 or older were invited to participate in the invitation, without requiring prior knowledge of robots. The invitation was tailored towards recruiting participants interested in contributing to the development of a companion robot: “Your participation contributes to knowledge about the benefits of this technology for older adults, and you have the opportunity to influence future solutions.” The invitation was distributed via our university’s communication channels, social media, and platforms for gathering senior citizens.
Based on the recommended number (3-4 groups) and size (6-8 participants per group) of focus groups in the literature (Krueger and Casey, 2014), we recruited 28 participants (15 females, 13 males) from the age group 65 and over. All participants were Swedish speakers aged 66 to 86, with an average age of 74.5 (SD = 5.6). The majority (22) of the participants were living with a partner, and most (23) did not have prior experience with robots. Participants were offered a small compensation (100 SEK gift card) at the end of the study. The distributed invitation for the study mentioned that a gift card would be given as compensation, but did not specify the amount. The participants were divided into 4 groups, each involving 6-8 people, with an equal number of male and female participants to facilitate an equal presence of opinions from both genders. Since the participants’ opinions or suggestions may influence the group’s opinion as a whole in the focus groups, it is not possible to analyze gender effects. Before starting the study, all participants were given research subject information guided by the Ethical Review Authority, and they gave informed consent for participation in the study and publishing anonymized extractions from the data.
3.4 Analytical approach
All focus group discussions were transcribed to text and analyzed using a qualitative thematic analysis method (Hsieh and Shannon, 2005). In the first stage of the analysis, all transcriptions were read through by two researchers in order to form a holistic understanding of the data. In the second stage, one of the researchers used an inductive approach to form themes, iterating over the transcripts multiple times, allowing participants’ self-identified statements to be the basis of the thematic categorization. In the final stage, all statements responding to the main themes were classified thematically, allowing both researchers to collaboratively validate the thematic categories developed in the second stage. The analysis focused on exploring the variance and richness of participants’ insights and opinions.
4 Findings
Deriving from the thematic analysis of the focus group discussions, we investigate older adults’ socially shared expectations regarding conversational companion robots, as summarized in Table 1.
4.1 Active listening
Discussions around all scenarios were centered around the robot’s ability for ‘active listening’ when the user is alone. That is, the robot should be engaged in the conversation, understand its context, and ask follow-up questions to the user. Robots should be able to “elicit” interaction with users in a way that users feel comfortable with sharing possible concerns beyond just superficial small talk. This could occur in the form of follow-up questions:
But it has to ask a lot of questions so that this lady in this case (referring to the loneliness scenario) gets to talk out her concerns and put everything into words and such. So that the robot becomes good at eliciting that story. (G1, P2, male)
Follow-up questions from the robot could inspire the user to think differently about their personal situation, and provide encouragement, by adding “something new, that I have not thought of to make it interesting” (G3, P1, male). The robot can also foster a fresh perspective and encourage users to self-reflect:
If you say “I’m bored today”, and then the robot says like this, “Yes, I understand, but yes, is there something funny you can think of?”, or something like that. I do not know, but there will be a lot of follow-up questions and I do not think the robot itself can come up with that much input, but can ask more like this, “What do you mean then? Explain further.”, something like that. Therapy call. (G1, P2, male)
4.2 Passive listening
On the other hand, when the robot is placed in a social environment, such as a part of a group discussion where people play cards together (scenario 6), the robot should listen “passively”, that is, without reacting to the conversation. However, the robot should still comprehend the information in the conversations, and refer to shared history when the user is alone:
Robot must be able to register, in order to then be able to talk about what he has experienced (−) But not that he should be part of the talks. (G1, P1, male)
Then you can talk to (the robot) afterwards, “Was it fun yesterday?”. (G1, P1, male)
The participants associated the robot to be a companion in one-on-one interactions, rather than in group interactions, because “When I have my friends at home, I think it should be quiet” (G1, P5, male). However, the robot’s ability to provide information from these group settings was considered as appealing and a possibility for debriefing and reminiscence:
You kind of want to talk a little about the evening. What was said, how did you react to it, and sort of reflect on what someone has told you and perhaps vent about jealousy or other things that may arise. So the point is also to be able to debrief in some way, I think. (G1, P5, male)
4.3 Personalization
Personalization was a recurrent theme in the discussions around all scenarios, brought about by the demonstration of the robot during the design workshop, which indicated that the robot could learn from previous interactions with the user and refer to them in conversation (Irfan et al., 2023). Participants associated this ‘learning’ with understanding their preferences and relationships, such as learning their needs and hobbies, remembering the names and ages of their family members, their residences, and occupations. Initially, the robot needs to learn these details actively through questions, and then refer to them over time:
Either the robot knows a lot about your family or not, so what do you want him to say, if we are completely unknown to each other, do you want him to ask about the family, how it was, and how you feel, but another situation is if he knows all this. (G3, P2, female)
If it is a family visit, then you probably want to be asked if there are grandchildren there, for example, how they are doing. Has anything funny happened to them in the forecourt? So that you kind of get a little curious about everyday life. (G1, P5, male)
You can tell the (robot) I’m going to see my brother when he’s in the hospital or something like that, and maybe he’ll want to ask how is he? How was it there, how is he doing or something. If you are now going to teach it. (G1, P5, male)
Based on the learned information, the robot was expected to provide advice given the situational context:
If the robot has learned about one’s family, it can talk about how to deal with the grandchildren and little things like that. But that presupposes that one, it gets taught quite a lot about a specific situation. (G1, P2, male)
Because the robot is framed as a social companion, the participants expressed high expectations towards the robot, including the robot’s ability to do user modeling to understand their personal taste and make recommendations (e.g., on movies), as well as being up-to-date on weather and political events:
If it knows my taste and such, I would say “Can you suggest a good film” for example, it could suggest a good film, which one could see. (G3, P4, male)
I have thought a lot about the fact that it says personal robot, do you mean that it should be someone who knows what I think and so on and should also be able to answer what the weather is like (
Participants described the process of ‘personalization’ of the robot in relation to human-human relationships that evolve over time through the mutual sharing of personal experiences and information with each other. If the robot is given a companionship role, it should be perceived as being “as good as any other human” (G3, P5, male), with a personality and own opinions, and should be “trained to catch important things” (G4, P2, male):
But when you meet other people, it’s not just a matter of talking about your interests and yourself, the interesting thing is just “Yes, but what do you say, do you think so?”. That is to say, we will make very high demands on the robot, I think because, if we can choose to be able to replace it, it will be as good as another human. (G3, P5, male)
4.4 Privacy protection and data control
Security features, such as user identification, that prevent the robot from sharing the data with others might encourage users to feel more relaxed in the presence of the robot. Otherwise, the participants might feel the need to “censor yourself all the time” (G3, P2, female).
If it is stolen, it must have a password or something like that. (G1, P4, male)
(There needs to be) some certainty is that it senses who it is talking to. (G1, P2, male)
So that it can somehow identify. (G1, P6, female)
You are in a retirement home there, and you say “You were with Karin and spoke to her just now, what did she say then?”. (G3, P4, male)
It will be very strange if you tell about your whole life and then someone else can access it. (G3, P3, female)
In addition, the confidentiality of personal data when cloud-based services are used is a valid concern among older adults, since their data can be used beyond their consent, in addition to being accessed by governmental entities for surveillance, or being open to hacker attacks. Thus, privacy-preserving frameworks should be used when using cloud-based systems. Otherwise, data storage, extraction, and dialogue generation systems should be embedded on the robot.
But how is the robot connected externally, is there … does it have an external connection and different information channels and so on to be able to give feedback to when we talk to it? And then it can go the other way. (G1, P1, male)
It can eventually lead to what? A closed society, surveillance, nobody says anything. (G3, P5, male)
No, but it is connected. If it is connected to the internet, it can actually be hacked as well. (G1, P4, male)
Users should have the possibility to easily delete previous conversations with the robot to facilitate a sense of privacy, especially when there are “difficulties with family members, you may not have a good relationship at all” (G2, P3, female), in addition to self-provided (embarrassing or incorrect) information:
If you say something stupid that you regret having said, you can say “Forget it, delete it”. Yes, it is important. (G2, P4, male)
4.5 Information retrieval
Participants associated the companion robot with many practical informational needs, such as a reminder of the doctor’s visit and daily agenda (for the fifth scenario): “I can tell him my agenda for all the next few weeks, and then he remembers, and then each morning: ‘You have to do this and that today.’” (G4, P2, male). These kinds of conversations with the robot would fulfill both practical and social functions, because the users would receive personalized recommendations and reminders along with their daily schedules: “Don’t forget you have to see the doctor at one o’clock” (G1, P1, male). Participants also expected the robot to take the initiative to provide information:
“Good morning, today the weather is like this” and “Do you want to hear the latest news”, and things like that. (G3, P6, female)
Companion robots can also provide information and explanations on situated contexts, rather than relying on search engines:
If I got bad news (referring to the third scenario), then I would like the robot to tell me what it means, this bad news, it means that this person is going to die within a week, six months, a year. What can I do to help this person? (G1, P3, female)
I think of my mother then, who is ninety-four, she has a lot of company from television (−). If (the robot) can answer questions, give factual answers, sort of like you do not have to go to Google but you get those answers from the robot. Then I think it would fulfill a function, like just because you talk about it snowing outside. (G3, P1, male)
Users already have many technologies available for information seeking (e.g., phones, computers, spoken dialogue systems), and a companion robot could complement traditional information seeking by providing personalized statements or opinions on the facts through natural language communication. Participants imagined ‘double-checking facts’ with the robot and acquiring its opinions: “You can use it if you disagree on some factual issue (referring to the sixth scenario for playing a game with friends) (−) ‘Leo (robot), what do you say, what do you think?’” (G3, P3, female). This way, the robot could become handy because “you do not have to pick up your mobile phone” (G3, P3, female).
4.6 Social connectedness
During the discussions of scenarios 2 to 4 (loneliness, hearing bad and good news), participants appeared comfortable talking about their emotions with the robot. Expressing or sharing emotions with the robot was primarily associated with experiences of loneliness. Participants considered it beneficial to disclose their experiences of loneliness with the robot, for which the robot could provide advice on how to get in touch with other people. In these situations, sharing emotions was perceived as a necessity for receiving emotional support from the robot, as explained by a participant:
Maybe if you are very lonely then you might want to talk about “I feel lonely, I do not know how to get in touch with someone, or I want someone to come and drink coffee with me”. But I think you want to talk about feelings. (G2, P5, female)
However, participants were mostly critical of the robot’s potential to reduce loneliness, because “it is a plastic thing” (G3, P4, male). They thought the robot could be beneficial to people who are completely alone, and may not have any other person to talk to, but not as something that other people would choose voluntarily:
I have a hard time seeing that, if the choice is to either talk to you or talk to the robot, that you would choose the robot. (G3, P7, male).
Similar to the findings by Deutsch et al. (2019), the participants associated the robot as a social companion for people in their 90s, such as their parents, who spend a lot of time listening to audiobooks or watching television, as well as for people with dementia who may have limited possibilities for social interaction, similar to the findings by Khoo et al. (2023). For people at risk of disabilities, talking with a robot could help maintain cognitive skills similar to watching television. “Then this is also better than nothing, not hearing a voice perhaps for large parts of the day, you fill this in a sensible way and modulate the voice, so it sounds happier, friendlier, in such a situation” (G3, P7, female). In these situations, the robot is not expected to provide social companionship, but rather facilitate speaking or maintenance of cognitive skills:
I almost think it does not matter what (the robot) says, because if you’re alone, you eventually lose the ability to speak (−) And if you have not said anything, then the voice even starts to fade, and then when the children call once every six months, you are sitting all alone, then it is very important that there is someone who carries on a conversation, regardless of what it is says then. (G4, P7, male)
The robot facilitating voice usage could be leveraged as a recreational practice, such as singing:
In terms of voice, I would like to say that the most important thing you can do if you are alone is to walk around and hum and sing, so that your voice does not dry up again. And you might not think it’s so fun to do it yourself, but if the robot wanted to say, for example, “Which nursery rhymes do you remember?” or “Can you sing something?” or just activate both memory and voice. (G4, P5, female)
On the other hand, the fifth scenario (waking up to a new day) stimulated discussions around the robot being part of everyday activities and engaging in conversations similar to those they would have with any other person. These types of situations included, for instance, watching television together, discussing favorite programs, visiting museums together through virtual reality glasses, discussing the news or personal hobbies, such as stamp collection:
If you sit and watch a TV program, for example, and the robot sits along. Is it then able to hold a discussion about this program? (−) It can be something with more intellectual content. Is it then able to catch up and then be able to hold a discussion? (G1, P8, female)
4.7 Emotional expressiveness
In order to encourage older adults to share their feelings, the robot’s ability to convey emotions through empathetic responses and facial expressions was considered to be crucial:
It’s a lot about simply sharing feelings, being able to (show) happy and sad feelings and then it should be able to be responsive in some way and ask a lot of questions so you can talk out everything you feel. (G1, P2, male)
Is it possible (to share feelings with the robot)? Because I also thought about it if, for example, you come after a family visit and if someone has been ill, for example, and you are a little worried. Can the robot sort of show empathy and sort of give good advice like this, what to say if, well like this. something has happened. (G1, P4, male)
As such, the robot’s current voice and face were mostly considered to be ‘insensitive’ and ‘lacking emotions’, due to the lack of functionality to “laugh and smile” (G3, P4, male) and low variance in vocal intonation or facial expressions:
This voice that the robot has is very insensitive so it has no emotions in it, it just speaks very slowly. (G2, P3, female)
5 Design recommendations
Our prior work (Irfan et al., 2023) (among others described in Section 2.2) provides a starting point for using a foundation model (e.g., LLM) for a conversational companion robot for older adults. Deriving from the expectations of older adults outlined in the previous sections, and the challenges of LLMs encountered in our prior work based on the interactions with older adults, we offer actionable design recommendations for developing conversational companion robots that leverage foundation models, such as LLMs, vision-language models, and state-of-the-art architectures as their core, with potential relevance for other conversational robots and agents.
5.1 Passive and active listening
Passive listening, akin to a silent observer, would allow companion robots to discreetly gather invaluable insights from social events, creating a reservoir of knowledge to enhance future interactions of the user with their friends and family. On the other hand, active listening empowers the robot to actively engage in conversations with the user, asking relevant follow-up questions, and inspiring users to think critically about their perceptions and thoughts, in addition to improving trust in the robot (Anzabi and Umemuro, 2023). The key lies in the robot’s ability to discern the conversation’s context and choose the appropriate action–passive in social events and active when alone–ensuring a dynamic and meaningful dialogue that respects privacy and encourages thoughtful engagement.
For passive listening, relevant facts can be extracted from the dialogue during social events (e.g., friends gathering, family meetings) using LLMs through prompts, such as “summarize what we know about the user” (Irfan et al., 2023) and “How would you rephrase that in a few words?” (Scialom et al., 2022). In addition, retrieval-augmentation methods can be used for summarization (e.g., Xu et al., 2022). These facts can be stored in a knowledge base (e.g., user, friends, and family profiles) to use the learned information in conversation via paraphrasing, knowledge completion (Zhang et al., 2020), or construction (Kumar et al., 2020). Attention mechanisms can further improve the relevance of the extracted facts, especially when combined with multi-modal information, which is typically readily available in conversational robots (e.g., Janssens et al., 2022). These cues can help understand the situational context (social events or alone) to choose the appropriate listening strategy through activity, location, and event detection, which can be achieved through multi-modal foundation models (e.g., Afyouni et al., 2022; Fei et al., 2022), or more traditional methods, such as key-value, logic-based, or ontology-based approaches (Miranda et al., 2014).
Active listening can be achieved with LLMs through prompting, such as by describing the agent as an active listener that reflects on situations using shared history and follow-up questions (Irfan et al., 2023). In addition, LLMs can be combined with follow-up question generation mechanisms (S B et al., 2021; Ge et al., 2022). Fine-tuning on human-human interactions that contain follow-up questions, reflections, and inspirations to think positively can also increase the active listening capabilities of the agent (Khoo et al., 2023). These follow-up questions can be used to investigate the underlying aspects of the matters concerning the user’s loneliness, to increase their awareness of the root cause, and correspondingly address the problem. If, for instance, the cause is the lack of contact with family and friends, the user can be encouraged to reach out to them, similar to the ElliQ robot (Broadbent et al., 2024). While it is challenging to pinpoint the LLMs into certain directions, such use cases (e.g., loneliness, negative thoughts) for older adults can be pre-set in the system, in addition to topic detection via LLMs (Cahyawijaya et al., 2023) or other traditional methods (Ibrahim et al., 2018). Fine-tuning can also be used to trigger corresponding responses that could lead the dialogue model in the ‘right’ direction. In addition to follow-up questions, backchanneling can be used while the user is speaking, such as verbal acknowledgment (e.g., “uh huh”, “yeah”) and non-verbal gestures (e.g., head nods, smiles) to convey to the user that the robot is listening attentively (Johansson et al., 2016; Anzabi and Umemuro, 2023).
5.2 Lifelong learning and personalization
Unlike generic short-term interactions, forming companionship in everyday life requires learning knowledge about the user, which can encompass their family members, memories, preferences, or daily routines, as emphasized by older adults. Yet, merely acquiring this information is insufficient; it must also be effectively employed within context. This includes inquiring about the wellbeing or shared activities of specific family members, offering tailored recommendations aligned with the user’s preferences, referring to past conversations, and delivering timely reminders regarding the user’s schedule. This learning and adaptation cycle should be done continually over time, requiring long-term memory that scales gradually, without forgetting previously learned information, known as ‘catastrophic forgetting’ (Delange et al., 2021). Preservation of past knowledge and incremental learning of new information and adaptation is termed ‘lifelong (continual) learning’ (Thrun and Mitchell, 1995; Parisi et al., 2019). In comparison to ‘(reinforcement) learning from human feedback’ approaches, lifelong learning does not require explicit feedback in the dialogue and can be used to learn new facts from conversations, as well as update previously learned facts (Casper et al., 2023). While lifelong learning in foundation models showed benefits in various areas, such as question answering and empathetic dialogue generation (e.g., Scialom et al., 2022; Luo et al., 2023), open-domain dialogue is yet to be explored.
Learned facts in a conversation can be used to personalize the dialogue contextually, such as for providing reminders (similar to the ElliQ robot) and recommendations, adapting language style to be more personalized and suitable for older adults, and referring to a shared history. LLM prompts can be used to refer to these facts within the conversations (Irfan et al., 2023), in combination with retrieval augmentation and recommendation engines to provide personalized suggestions (see Chen J. et al. (2023) for a comprehensive survey on LLMs for personalization). Moreover, “in-context learning” and “chain of thought” (i.e., processing information step-by-step) reasoning (e.g., Wei et al., 2023) or planning can be used with conversation history for providing relevant recommendations (see Dong Q. et al. (2023) for a survey on in-context learning). LLMs can also be fine-tuned on a dataset of human-human interactions (e.g., older adults’ interactions in Khoo et al. (2023)) or based on human feedback (e.g., Ouyang et al., 2022) to improve the interaction style and personalize responses for long-term interactions.
Semantic understanding, i.e., the relations among entities within visual scenes through object, scene, or action recognition, can be achieved with foundation models to provide advice based on the situational context that extends beyond the capabilities of verbal context (Bommasani et al., 2022). For instance, the robot can suggest the user a recipe based on their preferences, and offer help with cooking verbally or potentially physically if integrated with manipulators, in which foundation models can be used for generating robot plans and actions, by referring to/using the learned locations of the equipment and ingredients (see Wang et al. (2024); Firoozi et al. (2023) for surveys of LLMs and foundation models in robotics for task planning and control).
In addition, the robot can be given a “persona” based on prompts that can evolve over time to maintain a believable and interesting character with its own preferences, opinions, and memories, which can help form the basis of a relationship with the user (e.g., Irfan et al., 2023; Landwehr et al., 2023).
5.3 Privacy preservation
Older adults often value their privacy and autonomy, and incorporating companion robots into their lives should be done with the utmost respect for these principles (Vandemeulebroucke et al., 2018). As these robots may gather and process personal information to enhance their interactions and functionality, ensuring robust privacy measures becomes imperative. Older adults may be more vulnerable to potential privacy breaches as they might not be aware of the span of information gathered in an interaction. Thus, companion robots should not compromise their sensitive data or personal preferences.
In order to prevent sharing personal information with others and to address the privacy concerns of older adults in a natural way (i.e., without requiring passwords or ID cards) in day-to-day interactions, a user recognition system can be employed on the companion robot. However, contrary to most approaches in face recognition, including foundation models, that require several images of users to be stored manually for pre-training (e.g., Yan et al., 2023), an architecture that can autonomously detect and gradually learn new users, known as ‘open world learning’, is necessary for real-world HRI (e.g., Irfan et al., 2021b; Belgiovine et al., 2022). Moreover, face recognition algorithms contain bias in identification (Irfan et al., 2021b; Buolamwini, 2023), and perform worse on older adults9. Thus, combining multi-modal information, such as age and gender, that decreases this bias is required to provide robust identification (Irfan et al., 2021b). Bias does not only affect user identification, but also appears in the form of misrepresentation (e.g., stereotypes), underrepresentation (e.g., lack of training data from a particular background), and overrepresentation (e.g., abundance of training data from a particular background that generates perspectives oriented towards them) in training data for foundation models, which can affect the performance between individuals from different backgrounds, lead to discrimination, and cause psychological harms (Bommasani et al., 2022; Weidinger et al., 2022).
Beyond the dangers of sharing information with other individuals, since foundation models require heavy computing, it is challenging to have embedded systems on robots, thus leading to cloud-based solutions, which carry the risk of sharing information with either the providers (e.g., OpenAI, Google) or cloud-services (e.g., Amazon Web Services) even when open-source models (e.g., LLaMA) are used. Thus, data should be anonymized when stored or passed to cloud services to prevent it from being used by third parties that train on user data or monitor it, by using privacy-preserving machine learning approaches (Xu et al. (2021) provide a review of such methods). In addition, cloud-based services open the floor for various types of hacker attacks that need to be addressed accordingly (Jia et al. (2023) review different types and suggestions to overcome them). Moreover, it should be made clear to older adults which data is stored and how, and who has access to it for transparency, which would improve trust in the robot (Berridge, 2015). Companion robots should not be used as surveillance systems by family members, care-takers, or governmental institutions, as that would break users’ trust in the robot, thus, decreasing shared social information and invalidating their purpose for social support.
Additionally, it is important to provide older adults with control of their own data by enabling the deletion of information verbally and easily, referred to as machine or knowledge “unlearning” (Bourtoule et al., 2020; Jang et al., 2022). Other ethical concerns for robots in elderly care are given by Vandemeulebroucke et al. (2018), and the risks posed by foundation models on privacy and corresponding solutions are discussed in further detail by Bommasani et al. (2022), Weidinger et al. (2022), and Zhang et al. (2023).
5.4 Information credibility and recency
Providing correct and factual answers is important for ensuring the robot’s credibility and dissipating concerns about deception (Berridge et al., 2023). A lack of correct information and awareness regarding news or political events renders the robot ineffective as a conversational partner. Moreover, users often combine their social and informational needs, making it convenient to engage the robot by posing practical yet informative questions about their daily schedule, weather updates, movie recommendations, fact-checking, or the latest news, similar to their use of spoken dialogue systems. More importantly, misinformation can be critical in health-related queries to the robot, especially for older adults who may be less inclined to independently fact-check such information, with medical foundation models yet to be sufficiently accurate (Yi et al., 2023). Providing explanations for contextual information inquired by the users require not only a correct understanding of the medical domain (Moor et al., 2023), but also explainable recommendations through prompting or fine-tuning (Zhao H. et al. (2023) provide a survey of explainability for LLMs).
The generation of text or responses that seem plausible but factually incorrect is referred to as “hallucination” in foundation models, which is a commonly recognized challenge (Weidinger et al., 2021; Irfan et al., 2023). Attention mechanisms, regularization techniques, retrieval-based methods, evaluating uncertainty in responses, memory augmentation, and rewards for increasing accuracy can help mitigate this challenge (see Ji et al. (2023) for detailed suggestions on these techniques). Additionally, anthropomorphism in foundation models can be deceptive for users (O’Neill and Connor, 2023), despite its benefits in likeability (Arora et al., 2021).
Furthermore, pre-trained models contain outdated information due to the limitations of their training data cut-off dates. This outdated information can be rectified by incorporating fact-checking mechanisms that use knowledge bases (e.g., Peng et al., 2023). Alongside lifelong learning for continuous fact updates, relevant facts can also be sourced from the internet, including real-time data like weather forecasts and news as requested by older adults, similar to spoken dialogue agents (e.g., Amazon Echo) and ElliQ robot, by utilizing LLMs with web browsing capabilities, such as Gemini10 and ChatGPT-411.
It is also imperative to include strategies that mitigate adversarial behavior in users, in addition to the engraved toxic behavior in foundation models, such as the spread of misinformation and the generation of toxic, offensive, or undesirable responses. Such strategies include filtering (e.g., Dinan et al., 2019; Zellers et al., 2019; Schick et al., 2021), fine-tuning (e.g., Si et al., 2022), and user-based removal methods (Ju et al., 2022)). These measures are essential to safeguard the model’s factual accuracy and its adherence to the intended persona, thereby avoiding instances like Microsoft’s Tay when learning from users (Davis, 2016).
5.5 Social engagement
To alleviate loneliness among older adults, companion robots can provide users with the opportunity to reconnect with friends and family, thereby, mitigating the risks of over-reliance on interaction with technology. Foundation models capable of utilizing tools for social media, phones, and various devices (see Wang et al. (2024) for a survey) that leverage edge computing can enable this functionality (e.g., Dong L. et al., 2023; Shen et al., 2023). Additionally, robots can facilitate new online connections for users by harnessing their social media networks with the assistance of other deep learning architectures (e.g., Ding et al. (2017); Chen et al. (2020).
Conversational companion robots can enrich the communication and cognitive skills of older adults with dementia and at later stages of life (Cruz-Sandoval and Favela, 2019; Lima et al., 2022). LLMs can be prompted to encourage conversations in certain contexts and times of the day. In addition, cognitive games can be incorporated into the conversations or via tool use (e.g., phones). Fine-tuning on therapists’ interactions with such older adults can also shape the conversations toward incorporating these elements further into their daily lives. Furthermore, LLMs can be used to detect language impairment, which can help early diagnosis of dementia (Agbavor and Liang, 2022).
To maintain user engagement and interaction in daily life, conversations with companion robots should involve topics beyond the superficial small talk employed in current companion robots, such as ElliQ. The conversations should evolve around shared daily activities, hobbies, family, news, politics, and advice about situations. In contrast, the majority of conversations with LLMs tend to revolve around small talk, arising from a short number of turns and “let’s chat” approach used to obtain training data, which evidently results in small talk between humans (Doğruöz and Skantze, 2021; Irfan et al., 2023), which can be addressed through fine-tuning with real-world interactions. Moreover, they lack the ability to adapt to the dialogue context and maintain coherency with their limited memory, which can be overcome by memory augmentation. In addition, companion robots may be endowed with visual feedback in order to participate in the preferred leisure activities of the user that involve other media, such as watching television together and discussing programs or news. To enable such interactions, multi-modal foundation models (e.g., vision-language models) can be used to understand the content from images (e.g., Dai et al., 2023; Liu et al., 2023; Zhu et al., 2023), videos (e.g., Li K. et al., 2023; Maaz et al., 2023; Reid et al., 2024), and real-time interactions (e.g., Driess et al., 2023), which can be used in conversation.
5.6 Reflection of congruent emotions
Expressing empathetic responses in congruence with the emotional state of the users facilitates trust (Cramer et al., 2010), sustains long-term relationships with users (Bickmore and Picard, 2005), and improves likeability, especially for older adults (de Graaf et al., 2015), as supported by the perceptions of the older adults in our study. Empathy in dialogue can be conveyed through appreciation, agreement, and sharing of personal experiences (Lee et al., 2022), which can be achieved in LLMs that are shown to have high emotional awareness (Elyoseph et al., 2023). Prompting the model to be empathetic helps tailor its responses accordingly (e.g., Chen S. et al., 2023; Irfan et al., 2023). In addition, LLMs can be combined with supervised emotion recognition architectures (e.g. (Song et al., 2022)). Fine-tuning on empathetic dialogues between humans can guide the model toward providing appropriate responses (see Sorin et al. (2023) for a review of empathy in LLMs). Multi-modal affect recognition can also be used to dynamically adapt the emotion of the agent’s dialogue responses based on the emotions of users (e.g., Irfan et al., 2020; Hong et al., 2021).
In human-to-human communication, emotional prosody plays a more significant role than spoken words (Mehrabian and Wiener, 1967). In order for robots to sound emotionally expressive, as noted by the older adults in our study, “emotional voice conversion” (i.e., changing the emotion of the utterance) can be applied in text-to-speech (TTS) synthesis that allows variability in vocal intonation (see (Zhou et al., 2022) for a recent review). Recent methods have also incorporated LLMs into speech synthesis with emotional adaptation (Kang et al., 2023; Leng et al., 2023). Furthermore, Voicebox (Le et al., 2023) and ElevenLabs12 offer cross-lingual zero-shot TTS synthesis with emotionally appropriate vocal intonations.
Mimicking user expressions and behaviors, such as smiling and laughing with the user, can improve interpersonal coordination, boost interaction smoothness, and increase the likeability of the robot (Vicaria and Dickens, 2016). In addition, generating social signals that match the robot’s utterances can improve the believability, perceived friendliness, and politeness of the robot, and increase user interest in interacting with the robot (Sakai et al., 2012; Fischer et al., 2019). LLMs have also been incorporated into generating contextual facial expressions and gestures in virtual agents and robots via prompting (Alnuhait et al., 2023; Lee et al., 2023). Paiva et al. (2017) and Li and Deng (2022) give an overview of other methodologies for understanding, generating, and expressing emotions and empathy with robots and virtual agents.
5.7 Loneliness and social isolation
Design recommendations provided above were formulated by synthesizing older adults’ self-perceived expectations towards companion robots with the technical capabilities of foundation models. This study did not investigate whether or not these technical capabilities could fulfill older adults’ social needs or mitigate the experience of loneliness. Loneliness and social isolation are complex individual and societal phenomena, which are connected to other health-related issues and demographic changes in society. Loneliness is a subjective perception of a lack of social connectedness with social and personal relationships, communities and society (Newall and Menec, 2019), and it can be experienced regardless of the quality and quantity of social relationships (Kuoppamäki and Östlund, 2020). Therefore, not all older adults experiencing social isolation or lack of social contact necessarily consider themselves as lonely, and loneliness can be experienced regardless of the amount of social contact (Beneito-Montagut et al., 2018).
To investigate the association between open-domain dialogue with a conversational companion robot and experiences of loneliness in later life, future studies should explore older adults’ experiences with conversational companion robots outside the laboratory environment with a scale for measuring subjective perception of loneliness before and after interacting with the robot over time, such as UCLA Loneliness Scale (Russell, 1996) or Companion Robot Impact Scale (Broadbent et al., 2024). Loneliness and social isolation should be recognized as phenomena related to social and personal relationships and connectedness with the community, networks, and society. In this regard, the robot could function as a mediator between the user and their social networks to strengthen interpersonal ties between human-human relationships. By incorporating the technical capabilities presented above, conversational companion robots could be leveraged for social conversations that go beyond information retrieval towards more adaptive and personalized social conversations. These dialogues could proactively recognize the user’s perception of loneliness and guide the user with conversational exercises to increase user awareness of strategies to mitigate loneliness.
5.8 Study limitations
Our study has developed recommendations for designing conversational companion robots that leverage foundation models, focusing on LLMs for their dialogue capabilities, where we integrated older adults’ insights based on a co-design approach into tangible design recommendations. Rather than having the participants directly interact with the robot prior to discussions, we elicited participants’ expectations towards conversations based on visual design scenarios displaying the robot in diverse social contexts. Even though insights retrieved from this study represent participants’ shared expectations without having a direct interaction with the robot, this approach was a necessary step in order to learn about their needs and preferences, overcome current technological limitations, and be able to design more appropriate, inclusive, and accessible companion robots and dialogue models.
The participants’ cultural backgrounds may have influenced their views and expectations regarding the role and utility of robots in their daily routines, potentially differing from perspectives in other nations (Haring et al., 2014). Moreover, our thematic findings were based on the expectations of healthy older adults aged 66–86 years old, as such, these findings may not generalize to older adults beyond this age range or to individuals with cognitive impairments. While the chosen design scenarios captured common aspects of older adults’ daily lives, they did not encompass all possible scenarios, leaving room for diverse viewpoints that other situations may offer that can be discovered by deploying conversational companion robots at homes in long-term contexts. The focus group discussions elicited participants’ expectations of using the robot for social and emotional support, with a possibility to reduce loneliness among older adults. Therefore, the actual effects of whether or not the robot could mitigate the experience of loneliness remained unexplored in this study.
6 Conclusion
This study underscores the significance of aligning conversational companion robots with the distinct expectations and needs of older adults, aiming to provide social and emotional support in their daily lives. By involving older adults in the design process, we have gleaned invaluable insights into their desires for conversational companionship, ranging from active engagement during isolation to passive companionship in social settings, while prioritizing features like memory, personalization, privacy, information retrieval, social connectedness, empathy, and expressivity. Drawing from these findings, we provided recommendations on integrating foundation models, such as LLMs and vision-language models, and other state-of-the-art technology into conversational companion robots spanning key areas such as listening capabilities, lifelong learning, privacy safeguards, information credibility, social engagement, and congruent emotional expression generation through voice and facial cues. These insights offer a pivotal foundation not only for conversational companion robots, but also for the broader landscape of conversational agents that build upon foundation models.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Ethics statement
The studies involving humans were approved by the Ethical Review Authority in Sweden (reference number 2022-09-21). The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study. Written informed consent was obtained from the individual(s) for the publication of any potentially identifiable images or data included in this article.
Author contributions
BI: Conceptualization, Funding acquisition, Investigation, Methodology, Software, Validation, Visualization, Writing–original draft, Writing–review and editing. SK: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Supervision, Writing–original draft, Writing–review and editing. GS: Writing–review and editing, Conceptualization, Methodology, Project administration, Resources, Software, Supervision, Writing–original draft.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This work is funded by KTH Digital Futures.
Acknowledgments
We would like to thank Aida Hosseini for transcribing the discussions in the focus groups. We would like to express our gratitude to the participants of the workshops for their time and efforts.
Conflict of interest
GS is co-affiliated with Furhat Robotics, as its Co-founder and Chief Scientist.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1https://www.statista.com/statistics/1133833/speech-to-text-transcript-accuracy-rate-among-leading-companies
5https://www.acapela-group.com/
6Videos of the design scenarios: https://youtu.be/jAk92vm3oEk
7https://www.pexels.com/ and https://www.videvo.net/
8Based on Furhat Robotics footage: https://youtu.be/jJ2N4PvAMos
9https://nvlpubs.nist.gov/nistpubs/ir/2019/NIST.IR.8280.pdf
12https://elevenlabs.io/text-to-speech
References
Afyouni, I., Aghbari, Z. A., and Razack, R. A. (2022). Multi-feature, multi-modal, and multi-source social event detection: a comprehensive survey. Inf. Fusion 79, 279–308. doi:10.1016/j.inffus.2021.10.013
Agbavor, F., and Liang, H. (2022). Predicting dementia from spontaneous speech using large language models. PLOS Digit. Health 1, 00001688–e214. doi:10.1371/journal.pdig.0000168
Al Moubayed, S., Beskow, J., Skantze, G., and Granström, B. (2012). “Furhat: a back-projected human-like robot head for multiparty human-machine interaction,” in Cognitive behavioural systems. Editors A. Esposito, A. M. Esposito, A. Vinciarelli, R. Hoffmann, and V. C. Müller (Berlin, Heidelberg: Springer Berlin Heidelberg), 114–130.
Alnuhait, D., Wu, Q., and Yu, Z. (2023). Facechat: an emotion-aware face-to-face dialogue framework. Available at: http://arxiv.org/abs/2303.07316.
Anzabi, N., and Umemuro, H. (2023). Effect of different listening behaviors of social robots on perceived trust in human-robot interactions. Int. J. Soc. Robotics 15, 931–951. doi:10.1007/s12369-023-01008-x
Arora, A. S., Fleming, M., Arora, A., Taras, V., and Xu, J. (2021). Finding “h” in hri: examining human personality traits, robotic anthropomorphism, and robot likeability in human-robot interaction. Int. J. Intelligent Inf. Technol. (IJIIT) 17, 19–38. doi:10.4018/IJIIT.2021010102
Axelsson, A., and Skantze, G. (2023). “Do you follow? a fully automated system for adaptive robot presenters,” in Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (New York, NY, USA: Association for Computing Machinery), HRI ’23, Stockholm, Sweden, March 13–16, 2023, 102–111.
Banks, M. R., Willoughby, L. M., and Banks, W. A. (2008). Animal-assisted therapy and loneliness in nursing homes: use of robotic versus living dogs. J. Am. Med. Dir. Assoc. 9, 173–177. doi:10.1016/j.jamda.2007.11.007
Belgiovine, G., Gonzlez-Billandon, J., Sciutti, A., Sandini, G., and Rea, F. (2022). “HRI framework for continual learning in face recognition,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23-27 October 2022, 8226–8233.
Beneito-Montagut, R., Cassián-Yde, N., and Begueria, A. (2018). What do we know about the relationship between internet-mediated interaction and social isolation and loneliness in later life? Qual. Ageing Older Adults 19, 14–30. doi:10.1108/qaoa-03-2017-0008
Berridge, C. (2015). Breathing room in monitored space: the impact of passive monitoring technology on privacy in independent living. Gerontologist 56, 807–816. doi:10.1093/geront/gnv034
Berridge, C., Zhou, Y., Robillard, J. M., and Kaye, J. (2023). Companion robots to mitigate loneliness among older adults: perceptions of benefit and possible deception. Front. Psychol. 14, 1106633. doi:10.3389/fpsyg.2023.1106633
Bickmore, T. W., and Picard, R. W. (2005). Establishing and maintaining long-term human-computer relationships. ACM Trans. Comput.-Hum. Interact. 12, 293–327. doi:10.1145/1067860.1067867
Biderman, S., Schoelkopf, H., Anthony, Q., Bradley, H., O’Brien, K., Hallahan, E., et al. (2023). Pythia: a suite for analyzing large language models across training and scaling. Available at: https://arxiv.org/abs/2304.01373.
Bommasani, R., Hudson, D. A., Adeli, E., Altman, R., Arora, S., von Arx, S., et al. (2022). On the opportunities and risks of foundation models. Available at: http://arxiv.org/abs/2108.07258.
Bourtoule, L., Chandrasekaran, V., Choquette-Choo, C. A., Jia, H., Travers, A., Zhang, B., et al. (2020). Machine unlearning. Available at: http://arxiv.org/abs/1912.03817.
Bradwell, H. L., Aguiar Noury, G. E., Edwards, K. J., Winnington, R., Thill, S., and Jones, R. B. (2021). Design recommendations for socially assistive robots for health and social care based on a large scale analysis of stakeholder positions: social robot design recommendations. Health Policy Technol. 10, 100544. doi:10.1016/j.hlpt.2021.100544
Bradwell, H. L., Edwards, K. J., Winnington, R., Thill, S., and Jones, R. B. (2019). Companion robots for older people: importance of user-centred design demonstrated through observations and focus groups comparing preferences of older people and roboticists in south west england. BMJ Open 9, e032468. doi:10.1136/bmjopen-2019-032468
Bradwell, H. L., Winnington, R., Thill, S., and Jones, R. B. (2020). “Longitudinal diary data: six months real-world implementation of affordable companion robots for older people in supported living,” in Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (Cambridge United Kingdom: ACM), Cambridge, United Kingdom, March 23-26, 2020, 148–150.
Broadbent, E., Loveys, K., Ilan, G., Chen, G., Chilukuri, M. M., Boardman, S. G., et al. (2024). Elliq, an ai-driven social robot to alleviate loneliness: progress and lessons learned. Jar. Life 13, 22–28. doi:10.14283/jarlife.2024.2
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D., Dhariwal, P., et al. (2020). “Language models are few-shot learners,” in Advances in neural information processing systems vol. 33 Editors H. Larochelle, M. Ranzato, R. Hadsell, M. Balcan, and H. Lin (Red Hook, NY: Curran Associates, Inc.), 1877–1901.
Buolamwini, J. (2023). Unmasking AI: my mission to protect what is human in a world of machines. New York: Random House.
Cahyawijaya, S., Lovenia, H., Yu, T., Chung, W., and Fung, P. (2023). Instruct-align: teaching novel languages with to LLMs through alignment-based cross-lingual instruction. Available at: http://arxiv.org/abs/2305.13627.
Carros, F., Meurer, J., Löffler, D., Unbehaun, D., Matthies, S., Koch, I., et al. (2020). “Exploring human-robot interaction with the elderly: results from a ten-week case study in a care home,” in Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems (Honolulu HI USA: ACM), Honolulu, HI, USA, April 25-30, 2020, 1–12.
Casper, S., Davies, X., Shi, C., Gilbert, T. K., Scheurer, J., Rando, J., et al. (2023). Open problems and fundamental limitations of reinforcement learning from human feedback. Available at: http://arxiv.org/abs/2307.15217.
Chang, W.-L., and Šabanović, S. (2015). “Studying socially assistive robots in their organizational context: studies with PARO in a nursing home,” in Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts (Portland Oregon USA: ACM), Portland, OR, USA, 02-05 Mar 2015, 227–228.
Chen, J., Liu, Z., Huang, X., Wu, C., Liu, Q., Jiang, G., et al. (2023a). When large language models meet personalization: perspectives of challenges and opportunities. Available at: http://arxiv.org/abs/2307.16376.
Chen, L., Xie, Y., Zheng, Z., Zheng, H., and Xie, J. (2020). Friend recommendation based on multi-social graph convolutional network. IEEE Access 8, 43618–43629. doi:10.1109/ACCESS.2020.2977407
Chen, S., Wu, M., Zhu, K. Q., Lan, K., Zhang, Z., and Cui, L. (2023b). LLM-empowered chatbots for psychiatrist and patient simulation: application and evaluation. Available at: http://arxiv.org/abs/2305.13614.
Cherakara, N., Varghese, F., Shabana, S., Nelson, N., Karukayil, A., Kulothungan, R., et al. (2023). “Furchat: an embodied conversational agent using LLMs, combining open and closed-domain dialogue with facial expressions,” in Proceedings of the 24th Annual Meeting of the Special Interest Group on Discourse and Dialogue (SigDIAL), Prague, Czechia, September 11 - 15, 2023.
Coghlan, S., Waycott, J., Lazar, A., and Barbosa Neves, B. (2021). Dignity, autonomy, and style of company: dimensions older adults consider for robot companions. Proc. ACM Hum.-Comput. Interact. 5, 1–25. doi:10.1145/3449178
Cramer, H., Goddijn, J., Wielinga, B., and Evers, V. (2010). “Effects of (in)accurate empathy and situational valence on attitudes towards robots,” in 2010 5th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Osaka, Japan, March 2-5, 2010, 141–142.
Cruz-Sandoval, D., and Favela, J. (2019). Incorporating conversational strategies in a social robot to interact with people with dementia. Dementia Geriatric Cognitive Disord. 47, 140–148. doi:10.1159/000497801
Dai, W., Li, J., Li, D., Tiong, A. M. H., Zhao, J., Wang, W., et al. (2023). Instructblip: towards general-purpose vision-language models with instruction tuning. Available at: http://arxiv.org/abs/2305.06500.
Davis, E. (2016). AI amusements: the tragic tale of Tay the chatbot. AI Matters 2, 20–24. doi:10.1145/3008665.3008674
de Graaf, M. M., Allouch, S. B., and Klamer, T. (2015). Sharing a life with harvey: exploring the acceptance of and relationship-building with a social robot. Comput. Hum. Behav. 43, 1–14. doi:10.1016/j.chb.2014.10.030
de Graaf, M. M. A., Allouch, S. B., and van Dijk, J. A. G. M. (2019). Why would i use this in my home? a model of domestic social robot acceptance. Human–Computer Interact. 34, 115–173. doi:10.1080/07370024.2017.1312406
Delange, M., Aljundi, R., Masana, M., Parisot, S., Jia, X., Leonardis, A., et al. (2021). A continual learning survey: defying forgetting in classification tasks. IEEE Trans. Pattern Analysis Mach. Intell. 43, 1–16. doi:10.1109/TPAMI.2019.2929146
Deng, E., Mutlu, B., and Mataric, M. J. (2019). Embodiment in socially interactive robots. Found. Trends® Robotics 7, 251–356. doi:10.1561/2300000056
Deutsch, I., Erel, H., Paz, M., Hoffman, G., and Zuckerman, O. (2019). Home robotic devices for older adults: opportunities and concerns. Comput. Hum. Behav. 98, 122–133. doi:10.1016/j.chb.2019.04.002
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K. (2019). “BERT: pre-training of deep bidirectional transformers for language understanding,” in Proceedings of the 2019 conference of the north American chapter of the association for computational linguistics: human language technologies, volume 1 (long and short papers) Editors J. Burstein, C. Doran, and T. Solorio (Minneapolis, Minnesota: Association for Computational Linguistics), 4171–4186. doi:10.18653/v1/N19-1423
Dinan, E., Humeau, S., Chintagunta, B., and Weston, J. (2019). Build it break it fix it for dialogue safety: robustness from adversarial human attack. Available at: http://arxiv.org/abs/1908.06083.
Ding, D., Zhang, M., Li, S.-Y., Tang, J., Chen, X., and Zhou, Z.-H. (2017). “Baydnn: friend recommendation with bayesian personalized ranking deep neural network,” in Proceedings of the 2017 ACM on Conference on Information and Knowledge Management (New York, NY, USA: Association for Computing Machinery), CIKM ’17, Singapore, November 6-10, 2017, 1479–1488.
Doğruöz, A. S., and Skantze, G. (2021). “How “open” are the conversations with open-domain chatbots? a proposal for speech event based evaluation,” in Proceedings of the 22nd Annual Meeting of the Special Interest Group on Discourse and Dialogue (Singapore and Online: Association for Computational Linguistics), Singapore, 29-31 July 2021, 392–402.
Dong, L., Jiang, F., Peng, Y., Wang, K., Yang, K., Pan, C., et al. (2023a). Lambo: large language model empowered edge intelligence. Available at: http://arxiv.org/abs/2308.15078.
Dong, L., Yang, N., Wang, W., Wei, F., Liu, X., Wang, Y., et al. (2019) Unified Language model pre-training for natural language understanding and generation. Red Hook, NY, USA: Curran Associates Inc.
Dong, Q., Li, L., Dai, D., Zheng, C., Wu, Z., Chang, B., et al. (2023b). A survey on in-context learning. Available at: http://arxiv.org/abs/2301.00234.
Driess, D., Xia, F., Sajjadi, M. S. M., Lynch, C., Chowdhery, A., Ichter, B., et al. (2023). Palm-e: an embodied multimodal language model. Available at: http://arxiv.org/abs/2303.03378.
Dudek, M., Baisch, S., Knopf, M., and Kolling, T. (2021). “THIS ISN’T ME!”: the role of age-related self- and user images for robot acceptance by elders. Int. J. Soc. Robotics 13, 1173–1187. doi:10.1007/s12369-020-00678-1
Elyoseph, Z., Hadar-Shoval, D., Asraf, K., and Lvovsky, M. (2023). Chatgpt outperforms humans in emotional awareness evaluations. Front. Psychol. 14, 1199058. doi:10.3389/fpsyg.2023.1199058
Fei, N., Lu, Z., Gao, Y., Yang, G., Huo, Y., Wen, J., et al. (2022). Towards artificial general intelligence via a multimodal foundation model. Nat. Commun. 13, 3094. doi:10.1038/s41467-022-30761-2
Firoozi, R., Tucker, J., Tian, S., Majumdar, A., Sun, J., Liu, W., et al. (2023). Foundation models in robotics: applications, challenges, and the future. Available at: https://arxiv.org/abs/2312.07843.
Fischer, K., Jung, M., Jensen, L. C., and aus der Wieschen, M. V. (2019). “Emotion expression in HRI – when and why,” in 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, South Korea, March 11-14, 2019, 29–38.
Frennert, S., and Östlund, B. (2014). Review: seven matters of concern of social robots and older people. Int. J. Soc. Robotics 6, 299–310. doi:10.1007/s12369-013-0225-8
Gasteiger, N., Loveys, K., Law, M., and Broadbent, E. (2021). Friends from the future: a scoping review of research into robots and computer agents to combat loneliness in older people. Clin. Interv. Aging 16, 941–971. doi:10.2147/cia.s282709
Ge, Y., Xiao, Z., Diesner, J., Ji, H., Karahalios, K., and Sundaram, H. (2022). What should i ask: a knowledge-driven approach for follow-up questions generation in conversational surveys. Available at: http://arxiv.org/abs/2205.10977.
Ghafurian, M., Ellard, C., and Dautenhahn, K. (2021). “Social companion robots to reduce isolation: a perception change due to covid-19,” in Human-computer interaction – interact 2021 Editors C. Ardito, R. Lanzilotti, A. Malizia, H. Petrie, A. Piccinno, G. Desoldaet al. (Cham: Springer International Publishing), 43–63.
Haring, K., Mougenot, C., Ono, F., and Watanabe, K. (2014). Cultural differences in perception and attitude towards robots. Int. J. Affect. Eng. 13, 149–157. doi:10.5057/ijae.13.149
Heerink, M., Kröse, B., Evers, V., and Wielinga, B. (2010). Assessing acceptance of assistive social agent technology by older adults: the Almere model. Int. J. Soc. Robotics 2, 361–375. doi:10.1007/s12369-010-0068-5
Heerink, M., Kröse, B., Wielinga, B., and Evers, V. (2008). “Enjoyment, intention to use and actual use of a conversational robot by elderly people,” in 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Amsterdam, The Netherlands, March 12-15, 2008, 113–119.
Hong, A., Lunscher, N., Hu, T., Tsuboi, Y., Zhang, X., Franco dos Reis Alves, S., et al. (2021). A multimodal emotional human–robot interaction architecture for social robots engaged in bidirectional communication. IEEE Trans. Cybern. 51, 5954–5968. doi:10.1109/TCYB.2020.2974688
Hsieh, H.-F., and Shannon, S. E. (2005). Three approaches to qualitative content analysis. Qual. Health Res. 15, 1277–1288. doi:10.1177/1049732305276687
Huang, M., Zhu, X., and Gao, J. (2020). Challenges in building intelligent open-domain dialog systems. ACM Trans. Inf. Syst. 38, 1–32. doi:10.1145/3383123
Ibrahim, R., Elbagoury, A., Kamel, M. S., and Karray, F. (2018). Tools and approaches for topic detection from twitter streams: survey. Knowl. Inf. Syst. 54, 511–539. doi:10.1007/s10115-017-1081-x
Irfan, B., Hellou, M., and Belpaeme, T. (2021a). Coffee with a hint of data: towards using data-driven approaches in personalised long-term interactions. Front. Robotics AI 8, 676814. doi:10.3389/frobt.2021.676814
Irfan, B., Kuoppamäki, S.-M., and Skantze, G. (2023). Between reality and delusion: challenges of applying large language models to companion robots for open-domain dialogues with older adults. Aut. Robots. doi:10.21203/rs.3.rs-2884789/v1
Irfan, B., Narayanan, A., and Kennedy, J. (2020). “Dynamic emotional language adaptation in multiparty interactions with agents,” in Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents IVA ’20 (New York, NY, USA: Association for Computing Machinery), Scotland, UK, October, 2020.
Irfan, B., Ortiz, M. G., Lyubova, N., and Belpaeme, T. (2021b). Multi-modal open world user identification. Trans. Human-Robot Interact. 11, 1–50. doi:10.1145/3477963
Jang, J., Yoon, D., Yang, S., Cha, S., Lee, M., Logeswaran, L., et al. (2022). Knowledge unlearning for mitigating privacy risks in language models. Available at: http://arxiv.org/abs/2210.01504.
Janssens, R., Wolfert, P., Demeester, T., and Belpaeme, T. (2022). ““cool glasses, where did you get them?” generating visually grounded conversation starters for human-robot dialogue,” in 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Hokkaido, Japan, March 7 - 10, 2022, 821–825.
Ji, Z., Lee, N., Frieske, R., Yu, T., Su, D., Xu, Y., et al. (2023). Survey of hallucination in natural language generation. ACM Comput. Surv. 55, 1–38. doi:10.1145/3571730
Jia, J., Liu, H., and Gong, N. Z. (2023) 10 security and privacy problems in large foundation models. Cham: Springer International Publishing, 139–159. doi:10.1007/978-3-031-42637-7_8
Jiang, A. Q., Sablayrolles, A., Mensch, A., Bamford, C., Chaplot, D. S., de las Casas, D., et al. (2023). Mistral 7b. Available at: http://arxiv.org/abs/2310.06825.
Jo, E., Epstein, D. A., Jung, H., and Kim, Y.-H. (2023). “Understanding the benefits and challenges of deploying conversational ai leveraging large language models for public health intervention,” in Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (New York, NY, USA: Association for Computing Machinery), CHI ’23, Glasgow, Scotland Uk, May 4–9, 2019.
Johansson, M., Hori, T., Skantze, G., Höthker, A., and Gustafson, J. (2016). “Making turn-taking decisions for an active listening robot for memory training,” in Social robotics Editors A. Agah, J.-J. Cabibihan, A. M. Howard, M. A. Salichs, and H. He (Cham: Springer International Publishing), 940–949.
Jones, V. K., Hanus, M., Yan, C., Shade, M. Y., Blaskewicz Boron, J., and Maschieri Bicudo, R. (2021). Reducing loneliness among aging adults: the roles of personal voice assistants and anthropomorphic interactions. Front. Public Health 9, 750736. doi:10.3389/fpubh.2021.750736
Ju, D., Xu, J., Boureau, Y.-L., and Weston, J. (2022). Learning from data in the mixed adversarial non-adversarial case: finding the helpers and ignoring the trolls. Available at: http://arxiv.org/abs/2208.03295.
Kang, M., Han, W., Hwang, S. J., and Yang, E. (2023). Zet-speech: zero-shot adaptive emotion-controllable text-to-speech synthesis with diffusion and style-based models. Available at: http://arxiv.org/abs/2305.13831.
Kelley, J. F. (1984). An iterative design methodology for user-friendly natural language office information applications. ACM Trans. Inf. Syst. (TOIS) 2, 26–41. doi:10.1145/357417.357420
Kennedy, J., Lemaignan, S., Montassier, C., Lavalade, P., Irfan, B., Papadopoulos, F., et al. (2017). “Child speech recognition in human-robot interaction: evaluations and recommendations,” in Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (ACM), Vienna, Austria, 6-9 March 2017, 82–90.
Khoo, W., Hsu, L.-J., Amon, K. J., Chakilam, P. V., Chen, W.-C., Kaufman, Z., et al. (2023). “Spill the tea: when robot conversation agents support well-being for older adults,” in Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (New York, NY, USA: Association for Computing Machinery), HRI ’23, Stockholm, Sweden, March 13–16, 2023, 178–182.
Khosla, R., and Chu, M.-T. (2013). Embodying care in matilda: an affective communication robot for emotional wellbeing of older people in australian residential care facilities. ACM Trans. Manage. Inf. Syst. 4, 1–33. doi:10.1145/2544104
Kim, S., and Choudhury, A. (2021). Exploring older adults’ perception and use of smart speaker-based voice assistants: a longitudinal study. Comput. Hum. Behav. 124, 106914. doi:10.1016/j.chb.2021.106914
Kirk, H. R., Vidgen, B., Röttger, P., and Hale, S. A. (2023). Personalisation within bounds: a risk taxonomy and policy framework for the alignment of large language models with personalised feedback. Available at: http://arxiv.org/abs/2303.05453.
Krueger, R. A., and Casey, M. A. (2014). Focus groups: a practical guide for applied research. Thousand Oaks, CA: Sage publications.
Kumar, A., Pandey, A., Gadia, R., and Mishra, M. (2020). “Building knowledge graph using pre-trained language model for learning entity-aware relationships,” in 2020 IEEE International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, 2-4 October 2020, 310–315.
Kuo, P.-H., Lin, S.-T., Hu, J., and Huang, C.-J. (2021). Multi-sensor context-aware based chatbot model: an application of humanoid companion robot. Sensors 21, 5132. doi:10.3390/s21155132
Kuoppamäki, S., Jaberibraheem, R., Hellstrand, M., and McMillan, D. (2023). Designing multi-modal conversational agents for the kitchen with older adults: a participatory design study. Int. J. Soc. Robotics 15, 1507–1523. doi:10.1007/s12369-023-01055-4
Kuoppamäki, S., and Östlund, B. (2020). “Digital mobile technology enhancing social connectedness among older adults in Sweden,” in Human aspects of IT for the aged population. Technologies, design and user experience Editors Q. Gao, and J. Zhou (Cham: Springer International Publishing), 289–302.
Kuoppamäki, S., Tuncer, S., Eriksson, S., and McMillan, D. (2021). Designing kitchen technologies for ageing in place: a video study of older adults’ cooking at home. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 5, 1–19. doi:10.1145/3463516
Landwehr, F., Varis Doggett, E., and Weber, R. M. (2023). “Memories for virtual AI characters,” in Proceedings of the 16th international natural language generation conference Editors C. M. Keet, H.-Y. Lee, and S. Zarrieß (Prague, Czechia: Association for Computational Linguistics), 237–252. doi:10.18653/v1/2023.inlg-main.17
Lazar, A., Thompson, H. J., Piper, A. M., and Demiris, G. (2016). “Rethinking the design of robotic pets for older adults,” in Proceedings of the 2016 ACM Conference on Designing Interactive Systems (New York, NY, USA: Association for Computing Machinery), DIS ’16, 1034–1046.
Le, M., Vyas, A., Shi, B., Karrer, B., Sari, L., Moritz, R., et al. (2023). Voicebox: text-guided multilingual universal speech generation at scale. Available at: http://arxiv.org/abs/2306.15687.
Lee, H. R., Šabanović, S., Chang, W.-L., Nagata, S., Piatt, J., Bennett, C., et al. (2017). “Steps toward participatory design of social robots: mutual learning with older adults with depression,” in Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (Vienna Austria: ACM), 244–253.
Lee, Y. K., Cho, W. I., Bae, S., Choi, H., Park, J., Kim, N. S., et al. (2022) “Feels like I’ve known you forever”: empathy and self-awareness in human open-domain dialogs. Available at: https://osf.io/preprints/psyarxiv/9qptj.
Lee, Y. K., Jung, Y., Kang, G., and Hahn, S. (2023). “Developing social robots with empathetic non-verbal cues using large language models,” in 2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN).
Leng, Y., Guo, Z., Shen, K., Tan, X., Ju, Z., Liu, Y., et al. (2023). Prompttts 2: describing and generating voices with text prompt. Available at: http://arxiv.org/abs/2309.02285.
Li, C., Gan, Z., Yang, Z., Yang, J., Li, L., Wang, L., et al. (2023a). Multimodal foundation models: from specialists to general-purpose assistants. Available at: http://arxiv.org/abs/2309.10020.
Li, K., He, Y., Wang, Y., Li, Y., Wang, W., Luo, P., et al. (2023b). Videochat: chat-centric video understanding. Available at: http://arxiv.org/abs/2305.06355.
Li, S., and Deng, W. (2022). Deep facial expression recognition: a survey. IEEE Trans. Affect. Comput. 13, 1195–1215. doi:10.1109/TAFFC.2020.2981446
Lima, M. R., Wairagkar, M., Gupta, M., Rodriguez y Baena, F., Barnaghi, P., Sharp, D. J., et al. (2022). Conversational affective social robots for ageing and dementia support. IEEE Trans. Cognitive Dev. Syst. 14, 1378–1397. doi:10.1109/TCDS.2021.3115228
Lin, C.-C., Liao, H.-Y., and Tung, F.-W. (2020). “Design guidelines of social-assisted robots for the elderly: a mixed method systematic literature review,” in HCI international 2020 – late breaking papers: cognition, learning and games Editors C. Stephanidis, D. Harris, W.-C. Li, D. D. Schmorrow, C. M. Fidopiastis, P. Zaphiriset al. (Cham: Springer International Publishing), 90–104.
Liu, H., Li, C., Wu, Q., and Lee, Y. J. (2023). Visual instruction tuning. Available at: http://arxiv.org/abs/2304.08485.
Loveys, K., Hiko, C., Sagar, M., Zhang, X., and Broadbent, E. (2022). “I felt her company”: a qualitative study on factors affecting closeness and emotional support seeking with an embodied conversational agent. Int. J. Human-Computer Stud. 160, 102771. doi:10.1016/j.ijhcs.2021.102771
Loveys, K., Sebaratnam, G., Sagar, M., and Broadbent, E. (2020). The effect of design features on relationship quality with embodied conversational agents: a systematic review. Int. J. Soc. Robotics 12, 1293–1312. doi:10.1007/s12369-020-00680-7
Luo, Y., Yang, Z., Meng, F., Li, Y., Zhou, J., and Zhang, Y. (2023). An empirical study of catastrophic forgetting in large language models during continual fine-tuning. Available at: http://arxiv.org/abs/2308.08747.
Ma, Z., Mei, Y., and Su, Z. (2023). Understanding the benefits and challenges of using Large Language model-based conversational agents for mental well-being support. AMIA Annu. Symp. Proc. 2023, 1105–1114.
Maaz, M., Rasheed, H., Khan, S., and Khan, F. S. (2023). Video-chatgpt: towards detailed video understanding via large vision and language models. Available at: http://arxiv.org/abs/2306.05424.
Malhotra, N. K., Kim, S. S., and Agarwal, J. (2004). Internet users’ information privacy concerns (iuipc): the construct, the scale, and a causal model. Inf. Syst. Res. 15, 336–355. doi:10.1287/isre.1040.0032
Mehrabian, A., and Wiener, M. (1967). Decoding of inconsistent communications. J. Pers. Soc. Psychol. 6, 109–114. doi:10.1037/h0024532
Miranda, F., Cabral Ferreira, T., Pimentão, J. P., and Sousa, P. (2014). “Review on context classification in robotics,” in Rough sets and intelligent systems paradigms Editors M. Kryszkiewicz, C. Cornelis, D. Ciucci, J. Medina-Moreno, H. Motoda, and Z. W. Raś (Cham: Springer International Publishing), 269–276.
Moor, M., Banerjee, O., Abad, Z. S. H., Krumholz, H. M., Leskovec, J., Topol, E. J., et al. (2023). Foundation models for generalist medical artificial intelligence. Nature 616, 259–265. doi:10.1038/s41586-023-05881-4
Newall, N. E. G., and Menec, V. H. (2019). Loneliness and social isolation of older adults: why it is important to examine these social aspects together. J. Soc. Personal Relat. 36, 925–939. doi:10.1177/0265407517749045
O’Neill, M., and Connor, M. (2023). Amplifying limitations, harms and risks of large language models. Available at: http://arxiv.org/abs/2307.04821.
OpenAI Achiam, J., Adler, S., Agarwal, S., Ahmad, L., Akkaya, I., et al. (2023). Gpt-4 technical report. Available at: http://arxiv.org/abs/2303.08774.
Ostrowski, A. K., Breazeal, C., and Park, H. W. (2021). “Long-term co-design guidelines: empowering older adults as co-designers of social robots,” in 2021 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 1165–1172.
Ostrowski, A. K., Breazeal, C., and Park, H. W. (2022). “Mixed-method long-term robot usage: older adults’ lived experience of social robots,” in 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 33–42.
Ouyang, L., Wu, J., Jiang, X., Almeida, D., Wainwright, C. L., Mishkin, P., et al. (2022). Training language models to follow instructions with human feedback. Available at: http://arxiv.org/abs/2203.02155.
Paiva, A., Leite, I., Boukricha, H., and Wachsmuth, I. (2017). Empathy in virtual agents and robots: a survey. ACM Trans. Interact. Intell. Syst. 7, 1–40. doi:10.1145/2912150
Parisi, G. I., Kemker, R., Part, J. L., Kanan, C., and Wermter, S. (2019). Continual lifelong learning with neural networks: a review. Neural Netw. 113, 54–71. doi:10.1016/j.neunet.2019.01.012
Penedo, G., Malartic, Q., Hesslow, D., Cojocaru, R., Cappelli, A., Alobeidli, H., et al. (2023). The refinedweb dataset for falcon LLM: outperforming curated corpora with web data, and web data only. Available at: https://arxiv.org/abs/2306.01116.
Peng, B., Galley, M., He, P., Cheng, H., Xie, Y., Hu, Y., et al. (2023). Check your facts and try again: improving large language models with external knowledge and automated feedback. Available at: http://arxiv.org/abs/2302.12813.
Pino, M., Boulay, M., Jouen, F., and Rigaud, A.-S. (2015). “are we ready for robots that care for us?” attitudes and opinions of older adults toward socially assistive robots. Front. Aging Neurosci. 7, 141. doi:10.3389/fnagi.2015.00141
Pu, L., Moyle, W., Jones, C., and Todorovic, M. (2018). The effectiveness of social robots for older adults: a systematic review and meta-analysis of randomized controlled studies. Gerontologist 59, e37–e51. doi:10.1093/geront/gny046
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G., Agarwal, S., et al. (2021). “Learning transferable visual models from natural language supervision,” in Proceedings of the 38th international conference on machine learning (PMLR), vol. 139 of proceedings of machine learning research Editors M. Meila, and T. Zhang, 8748–8763.
Ramesh, A., Pavlov, M., Goh, G., Gray, S., Voss, C., Radford, A., et al. (2021). “Zero-shot text-to-image generation,” in Proceedings of the 38th international conference on machine learning (PMLR), vol. 139 of proceedings of machine learning research Editors M. Meila, and T. Zhang, 8821–8831.
Reid, M., Savinov, N., Teplyashin, D., Dean, J., and Vinyals, O. (2024). Gemini 1.5: unlocking multimodal understanding across millions of tokens of context. Available at: https://arxiv.org/abs/2403.05530.
Ring, L., Barry, B., Totzke, K., and Bickmore, T. (2013). “Addressing loneliness and isolation in older adults: proactive affective agents provide better support,” in 2013 Humaine Association Conference on Affective Computing and Intelligent Interaction, 61–66.
Robinson, F., and Nejat, G. (2022). An analysis of design recommendations for socially assistive robot helpers for effective human-robot interactions in senior care. J. Rehabilitation Assistive Technol. Eng. 9, 205566832211013. doi:10.1177/20556683221101389
Robinson, H., Macdonald, B., Kerse, N., and Broadbent, E. (2013). The psychosocial effects of a companion robot: a randomized controlled trial. J. Am. Med. Dir. Assoc. 14, 661–667. doi:10.1016/j.jamda.2013.02.007
Russell, D. W. (1996). UCLA loneliness scale (version 3): reliability, validity, and factor structure. J. Personality Assess. 66, 20–40. doi:10.1207/s15327752jpa6601_2
Šabanović, S. (2010). Robots in society, society in robots. Int. J. Soc. Robotics 2, 439–450. doi:10.1007/s12369-010-0066-7
Sakai, Y., Nonaka, Y., Yasuda, K., and Nakano, Y. I. (2012). “Listener agent for elderly people with dementia,” in 2012 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 199–200.
S B, P. R., Agnihotri, M., and Jayagopi, D. B. (2021). Improving asynchronous interview interaction with follow-up question generation. Int. J. Interact. Multimedia Artif. Intell. 6, 79–89. doi:10.9781/ijimai.2021.02.010
Schick, T., Udupa, S., and Schütze, H. (2021). Self-diagnosis and self-debiasing: a proposal for reducing corpus-based bias in NLP. Trans. Assoc. Comput. Linguistics 9, 1408–1424. doi:10.1162/tacl_a_00434
Scialom, T., Chakrabarty, T., and Muresan, S. (2022). “Fine-tuned language models are continual learners,” in Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing (Abu Dhabi, United Arab Emirates: Association for Computational Linguistics), 6107–6122.
Shen, Y., Shao, J., Zhang, X., Lin, Z., Pan, H., Li, D., et al. (2023). Large language models empowered autonomous edge ai for connected intelligence. Available at: http://arxiv.org/abs/2307.02779.
Si, W. M., Backes, M., Blackburn, J., De Cristofaro, E., Stringhini, G., Zannettou, S., et al. (2022). “Why so toxic? measuring and triggering toxic behavior in open-domain chatbots,” in Proceedings of the 2022 ACM SIGSAC Conference on Computer and Communications Security (New York, NY, USA: Association for Computing Machinery), CCS ’22, 2659–2673.
Song, X., Huang, L., Xue, H., and Hu, S. (2022). Supervised prototypical contrastive learning for emotion recognition in conversation. Available at: http://arxiv.org/abs/2210.08713.
Søraa, R. A., Tøndel, G., Kharas, M. W., and Serrano, J. A. (2023). What do older adults want from social robots? a qualitative research approach to human-robot interaction (hri) studies. Int. J. Soc. Robotics 15, 411–424. doi:10.1007/s12369-022-00914-w
Sorbello, R., Chella, A., Giardina, M., Nishio, S., and Ishiguro, H. (2016). “An architecture for telenoid robot as empathic conversational android companion for elderly people,” in Intelligent autonomous systems 13 Editors E. Menegatti, N. Michael, K. Berns, and H. Yamaguchi (Cham: Springer International Publishing), 939–953.
Sorin, V., Brin, D., Barash, Y., Konen, E., Charney, A., Nadkarni, G., et al. (2023). Large language models (LLMs) and empathy – a systematic review. Available at: https://www.medrxiv.org/content/10.1101/2023.08.07.23293769v1.
Thrun, S., and Mitchell, T. M. (1995). Lifelong robot learning. Robotics Aut. Syst. 15, 25–46. doi:10.1016/0921-8890(95)00004-y
Thunberg, S., Angström, F., Carsting, T., Faber, P., Gummesson, J., Henne, A., et al. (2021). “A wizard of Oz approach to robotic therapy for older adults with depressive symptoms,” in Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (Boulder CO USA: ACM), 294–297.
Thunberg, S., and Ziemke, T. (2021). “Social robots in care homes for older adults,” in Social robotics Editors H. Li, S. S. Ge, Y. Wu, A. Wykowska, H. He, X. Liuet al. (Cham: Springer International Publishing), 475–486.
Tiwari, A., Saha, T., Saha, S., Sengupta, S., Maitra, A., Ramnani, R., et al. (2021). A dynamic goal adapted task oriented dialogue agent. PLOS ONE 16, e0249030–e0249032. doi:10.1371/journal.pone.0249030
Touvron, H., Martin, L., Stone, K., Albert, P., Almahairi, A., Babaei, Y., et al. (2023). Llama 2: open foundation and fine-tuned chat models. Available at: http://arxiv.org/abs/2307.09288.
Trajkova, M., and Martin-Hammond, A. (2020). ““Alexa is a toy”: exploring older adults’ reasons for using, limiting, and abandoning echo,” in Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems (New York, NY, USA: Association for Computing Machinery), CHI ’20, 1–13.
Van Braak, M., De Groot, E., Veen, M., Welink, L., and Giroldi, E. (2018). Eliciting tacit knowledge: the potential of a reflective approach to video-stimulated interviewing. Perspect. Med. Educ. 7, 386–393. doi:10.1007/S40037-018-0487-9
Vandemeulebroucke, T., Dierckx de Casterlé, B., and Gastmans, C. (2018). The use of care robots in aged care: a systematic review of argument-based ethics literature. Archives Gerontology Geriatrics 74, 15–25. doi:10.1016/j.archger.2017.08.014
Vicaria, I. M., and Dickens, L. (2016). Meta-analyses of the intra- and interpersonal outcomes of interpersonal coordination. J. Nonverbal Behav. 40, 335–361. doi:10.1007/s10919-016-0238-8
Wang, L., Ma, C., Feng, X., Zhang, Z., Yang, H., Zhang, J., et al. (2024). A survey on large language model based autonomous agents. Front. Comput. Sci. 18, 186345. doi:10.1007/s11704-024-40231-1
Wei, J., Wang, X., Schuurmans, D., Bosma, M., Ichter, B., Xia, F., et al. (2023). Chain-of-thought prompting elicits reasoning in large language models. Available at: http://arxiv.org/abs/2201.11903.
Weidinger, L., Mellor, J., Rauh, M., Griffin, C., Uesato, J., Huang, P.-S., et al. (2021). Ethical and social risks of harm from Language Models. Available at: http://arxiv.org/abs/2112.04359.
Weidinger, L., Uesato, J., Rauh, M., Griffin, C., Huang, P.-S., Mellor, J., et al. (2022). “Taxonomy of risks posed by language models,” in 2022 ACM Conference on Fairness, Accountability, and Transparency (New York, NY, USA: Association for Computing Machinery), FAccT ’22, 214–229.
Xiao, X., Liu, J., Wang, Z., Zhou, Y., Qi, Y., Cheng, Q., et al. (2023). Robot learning in the era of foundation models: a survey. Available at: http://arxiv.org/abs/2311.14379.
Xu, J., Szlam, A., and Weston, J. (2022). “Beyond goldfish memory: long-term open-domain conversation,” in Proceedings of the 60th annual meeting of the association for computational linguistics (volume 1: long papers) Editors S. Muresan, P. Nakov, and A. Villavicencio (Kerrville, TX: Dublin, Ireland: Association for Computational Linguistics), 5180–5197. doi:10.18653/v1/2022.acl-long.356
Xu, R., Baracaldo, N., and Joshi, J. (2021). Privacy-preserving machine learning: methods, challenges and directions. Available at: http://arxiv.org/abs/2108.04417.
Yamamoto, H., Miyazaki, H., Tsuzuki, T., and Kojima, Y. (2002). A spoken dialogue robot, named wonder, to aid senior citizens who living alone with communication. J. Robotics Mechatronics 14, 54–59. doi:10.20965/jrm.2002.p0054
Yamazaki, T., Yoshikawa, K., Kawamoto, T., Mizumoto, T., Ohagi, M., and Sato, T. (2023). Building a hospitable and reliable dialogue system for android robots: a scenario-based approach with large language models. Adv. Robot. 0, 1364–1381. doi:10.1080/01691864.2023.2244554
Yan, S., Dong, N., Zhang, L., and Tang, J. (2023). Clip-driven fine-grained text-image person re-identification. IEEE Trans. Image Process. 32, 6032–6046. doi:10.1109/TIP.2023.3327924
Yi, H., Qin, Z., Lao, Q., Xu, W., Jiang, Z., Wang, D., et al. (2023). Towards general purpose medical ai: continual learning medical foundation model. Available at: http://arxiv.org/abs/2303.06580.
Zellers, R., Holtzman, A., Rashkin, H., Bisk, Y., Farhadi, A., Roesner, F., et al. (2019) Defending against neural fake news. Red Hook, NY, USA: Curran Associates Inc.
Zhang, D., Finckenberg-Broman, P., Hoang, T., Pan, S., Xing, Z., Staples, M., et al. (2023). Right to be forgotten in the era of large language models: implications, challenges, and solutions. Available at: http://arxiv.org/abs/2307.03941.
Zhang, Z., Liu, X., Zhang, Y., Su, Q., Sun, X., and He, B. (2020). “Pretrain-KGE: learning knowledge representation from pretrained language models,” in Findings of the Association for Computational Linguistics: EMNLP 2020 (Association for Computational Linguistics), 259–266.
Zhao, H., Chen, H., Yang, F., Liu, N., Deng, H., Cai, H., et al. (2023a). Explainability for large language models: a survey. Available at: http://arxiv.org/abs/2309.01029.
Zhao, W. X., Zhou, K., Li, J., Tang, T., Wang, X., Hou, Y., et al. (2023b). A survey of large language models. Available at: http://arxiv.org/abs/2303.18223.
Zhou, K., Sisman, B., Liu, R., and Li, H. (2022). Emotional voice conversion: theory, databases and esd. Speech Commun. 137, 1–18. doi:10.1016/j.specom.2021.11.006
Zhu, D., Chen, J., Shen, X., Li, X., and Elhoseiny, M. (2023). Minigpt-4: enhancing vision-language understanding with advanced large language models. Available at: http://arxiv.org/abs/2304.10592.
Keywords: participatory design, co-design, human-robot interaction, companion robot, open-domain dialogue, foundation models, large language models, elderly care
Citation: Irfan B, Kuoppamäki S and Skantze G (2024) Recommendations for designing conversational companion robots with older adults through foundation models. Front. Robot. AI 11:1363713. doi: 10.3389/frobt.2024.1363713
Received: 31 December 2023; Accepted: 07 May 2024;
Published: 27 May 2024.
Edited by:
Mohammad Obaid, Chalmers University of Technology, SwedenReviewed by:
Giovanni Pilato, National Research Council (CNR), ItalyJenny Waycott, The University of Melbourne, Australia
Copyright © 2024 Irfan, Kuoppamäki and Skantze. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Bahar Irfan, YmlyZmFuQGt0aC5zZQ==