 Mrudul Chellapurath
Mrudul Chellapurath Pranav C. Khandelwal
Pranav C. Khandelwal Andrew K. Schulz
Andrew K. Schulz
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
PERSPECTIVE article
Front. Robot. AI, 18 October 2023
Sec. Bio-Inspired Robotics
Volume 10 - 2023 | https://doi.org/10.3389/frobt.2023.1145798
This article is part of the Research TopicThe Future of Bio-Inspired Robotics: An Early Career Scientists’ PerspectiveView all 5 articles
We live in a time of unprecedented scientific and human progress while being increasingly aware of its negative impacts on our planet’s health. Aerial, terrestrial, and aquatic ecosystems have significantly declined putting us on course to a sixth mass extinction event. Nonetheless, the advances made in science, engineering, and technology have given us the opportunity to reverse some of our ecosystem damage and preserve them through conservation efforts around the world. However, current conservation efforts are primarily human led with assistance from conventional robotic systems which limit their scope and effectiveness, along with negatively impacting the surroundings. In this perspective, we present the field of bioinspired robotics to develop versatile agents for future conservation efforts that can operate in the natural environment while minimizing the disturbance/impact to its inhabitants and the environment’s natural state. We provide an operational and environmental framework that should be considered while developing bioinspired robots for conservation. These considerations go beyond addressing the challenges of human-led conservation efforts and leverage the advancements in the field of materials, intelligence, and energy harvesting, to make bioinspired robots move and sense like animals. In doing so, it makes bioinspired robots an attractive, non-invasive, sustainable, and effective conservation tool for exploration, data collection, intervention, and maintenance tasks. Finally, we discuss the development of bioinspired robots in the context of collaboration, practicality, and applicability that would ensure their further development and widespread use to protect and preserve our natural world.
Humans have arrived at a critical juncture in their relationship with nature. Human activities such as unsustainable resource extraction, large-scale production/development, and air, water, and land pollution are degrading the planet’s health and threatening the existence of its inhabitants (Visbeck, 2018). The last 50 years have seen an exponential decline in ecosystem health and a loss of nearly 70% of our planet’s biodiversity (Ledger et al., 2023). Conservation efforts are critical to protecting and reviving ecosystems around the world and to prevent a sixth-mass extinction event (Hendriks et al., 2006; Ceballos et al., 2015).
Conservation efforts can be broadly divided into exploration, data collection, monitoring, intervention, and maintenance tasks. Each of these tasks is essential to address ecosystem knowledge gaps, promote ecosystem health, and work towards reversing the ecosystem damage (Table 1). For example, an estimated 17,000 out of 120,000 species monitored by the IUCN Red List of Threatened Species are listed as ‘Data deficient’, meaning there is not enough data to make a reliable population estimate (Tuia et al., 2022). Moreover, a vast majority of the oceans’ depths are still unexplored, and the human impact on them remains unknown (Roberto et al., 2020). These ecosystem knowledge gaps emphasize the need for innovative and efficient approaches for conducting exploration, data collection, and monitoring activities. Equally important in conservation efforts are intervention and maintenance tasks. Intervention tasks such as tackling the spread of invasive species are required to prevent biodiversity loss and maintain healthy functioning of the ecosystem (Linders et al., 2019). Additionally, the proper management of invasive species can lead to overall economic benefits for the local communities (Keller et al., 2008; Hanley and Roberts, 2019). Maintenance tasks including removal of trash generated by humans or managing insect outbreaks and forest fires are critical to ensure the continuity of ecosystem services (Daily, 1997; Amelia et al., 2021; Gross, 2021).
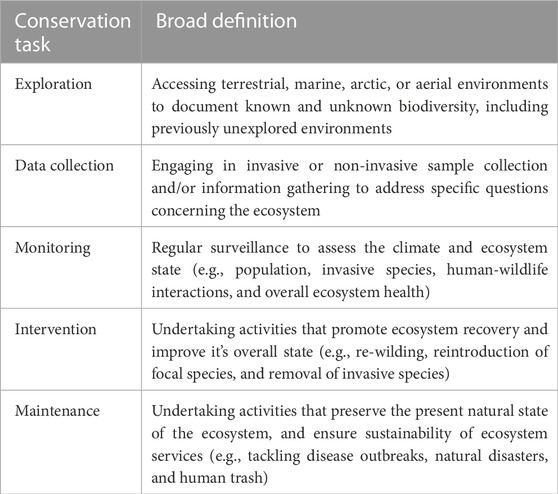
TABLE 1. Brief description of tasks involved during conservation.
At present, a majority of conservation efforts are human-led. Human-led exploration, data collection, and monitoring can be risky and is often based on opportunistic sampling and/or use of stationary recording devices (camera and/or sensors) to collect data at regular intervals (Zwerts et al., 2021). Many locations that remain largely uncharted and challenging for humans including cave structures (Candiroglu and Gungor, 2017), the ocean floor (Beck Eichler and Barker, 2020), and extreme cold Arctic and Antarctic regions can provide important information on the ecosystem health. However, such locations present logistical complexities with limited infrastructure, restricted transportation options, and adverse environmental conditions that hinder comprehensive conservation endeavors. A secondary consequence of human led missions is the possibility of harming the environment, disturbing the inhabiting organisms, or influencing the conservation task itself (Figures 1A–C). Using helicopters for biodiversity surveys has been shown to influence the behavior of wildlife in its vicinity (Anderson, 2007) while contributing towards environmental pollution (Figure 1A). Similar expectations hold for automobiles used for wildlife monitoring that can harm small wildlife and the landscape during operation. Intervention and maintenance tasks pose additional challenges since they often require direct human involvement, such as administering medication to animals, resolving human-animal conflicts, or undertaking restoration efforts. The complexity of such tasks require special human expertise and equipment/resources, consequently restricting the scope of their implementation (Boström-Einarsson et al., 2020; Camarretta et al., 2020).
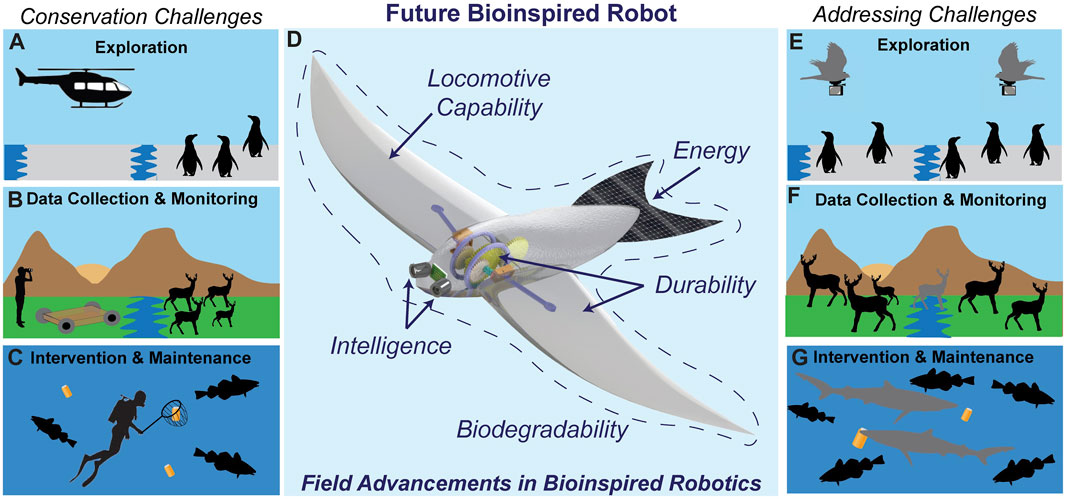
FIGURE 1. Illustration shows the current challenges associated with conservation efforts and presents future bioinspired robots as an attractive solution to address those challenges in aerial, terrestrial, and aquatic environments. (A–C) provide representative use cases of humans and conventional robots involved in conservation efforts and their limitations and negative impacts; (A) noise pollution and behavioral change, (B) inaccessibility to collect high-quality data, (C) inefficiency to collect non-biodegradable waste. (D) highlights the operating considerations for the efficient, sustainable, and widespread use of bioinspired robots for conservation using an example of a conceptual bird inspired robot (adapted from (Chellapurath et al., 2021a). (E–G) depicts advantages of bioinspired robots (colored gray) in each scenario corresponding to (A–C); (E) low noise and environmental integration, (F) close proximity high quality data collection/monitoring and environmental integration, (G) efficient intervention for waste collection over large spatial scales using multiple bioinspired robots. Illustrations and Silhouettes taken from Adobe Stock and illustrators V. Deepak, Ignacio Contreras, and Tony Ayling (vectorized by T. Michael Keesey).
Tackling some of the issues related to human-led efforts has seen the adoption of robotic systems to facilitate in various conservation tasks. Unmanned Aerial Vehicles (UAVs) are used to scan large forest areas to monitor canopy cover while leaving the landscape untouched. They have also been employed to track whales on the ocean surface and fly through unexplored caves that are inaccessible to humans (Hodgson et al., 2013; Zhang et al., 2017; Horton et al., 2019). Autonomous Underwater Vehicles (AUVs) and Remotely Operated Vehicles (ROVs) are used to explore marine life and observe the ocean floor at depths which are risky for manned missions (Sward et al., 2019). Terrestrial robots are deployed to explore and survey landscapes, including active volcano areas and glaciers (Muscato et al., 2012). Overall, these systems have allowed researchers and conservationists to survey larger and more diverse areas, and make more frequent repetitive measurements. Intervention and maintenance tasks have also benefited from the use of robotic systems. Large scale forest and coral restoration has been demonstrated using UAVs and AUVs, however, these applications rely on high quantity of plant seed or coral larva dispersal to increase the odds of tree/coral generation (Dunbabin et al., 2020; Mohan et al., 2021). Hybrid systems such as virtual fences and smart beehives have positively impacted the field of agriculture by providing real-time animal monitoring and reducing human-livestock conflict (Butler et al., 2006; Cecchi et al., 2020).
Despite the wide use of robotic systems to assist in conservation tasks, their conventional design, locomoting mode, and size can make them ineffective in many situations encountered during conservation. Conventional locomoting mode of wheeled robots makes it challenging to cross gaps, move on uneven terrains, and traverse obstacles (Figure 1B) (Gao et al., 2018). Entering canopies for close inspection and sampling or navigating spatially tight aerial environments with conventional multi-rotor UAVs is accident prone, which is in addition to their loud rotor noise that can disturb wildlife (Christiansen et al., 2016). In aquatic environments, propeller driven AUVs or ROVs can suspend sediments from the water bed and trap lifeforms in their slipstreams which can harm aquatic life and contaminate samples during collection (Chellapurath et al., 2021b). Robotic systems with rigid structural components and lack of sophisticated computation and control, limits their ability to perform precise and intricate movements which are required in many intervention and maintenance tasks. For example, delicate handling of the animal for administering medication or instant decision making to resolve a rapidly evolving human-animal conflict situation remain beyond the capabilities of present-day robotic or hybrid systems.
Improving the capabilities of conventional robots in terrestrial, aquatic, and aerial environments has led to researchers drawing inspiration from millions of years of evolution in nature (Sadeghi et al., 2020; Penick et al., 2022), resulting in the establishment of the fields of biomimetics and bioinspired robotics. Biomimetic robotic systems directly incorporate aspects of the morphology, mechanics, sensing or control found in biological systems. Bioinspired robots abstract the fundamental principles behind the form and function of a biological systems to improve their capabilities (Popovic, 2019). Both of these approaches can be implemented in parallel in a robotic system. Recently, several bioinspired robots have aimed to emulate both the physical appearance and the intrinsic dynamics of biological movement, resulting in robust and agile robots (Gravish and Lauder, 2018), that can move, sense, and even look like plants or animals. These new capabilities allow these robots to access different ecosystems and spaces that were not possible before (Savage, 2022). Moreover, it opens up the possibility to operate in close proximity to the local flora and fauna without disturbing it and the environment’s natural state (Li et al., 2019). Altogether, these characteristics make bioinspired robots an attractive candidate to undertake a variety of conservation tasks. A subset of bioinspired robots operating in terrestrial, aerial/arboreal, and aquatic environments are presented in Table 2.
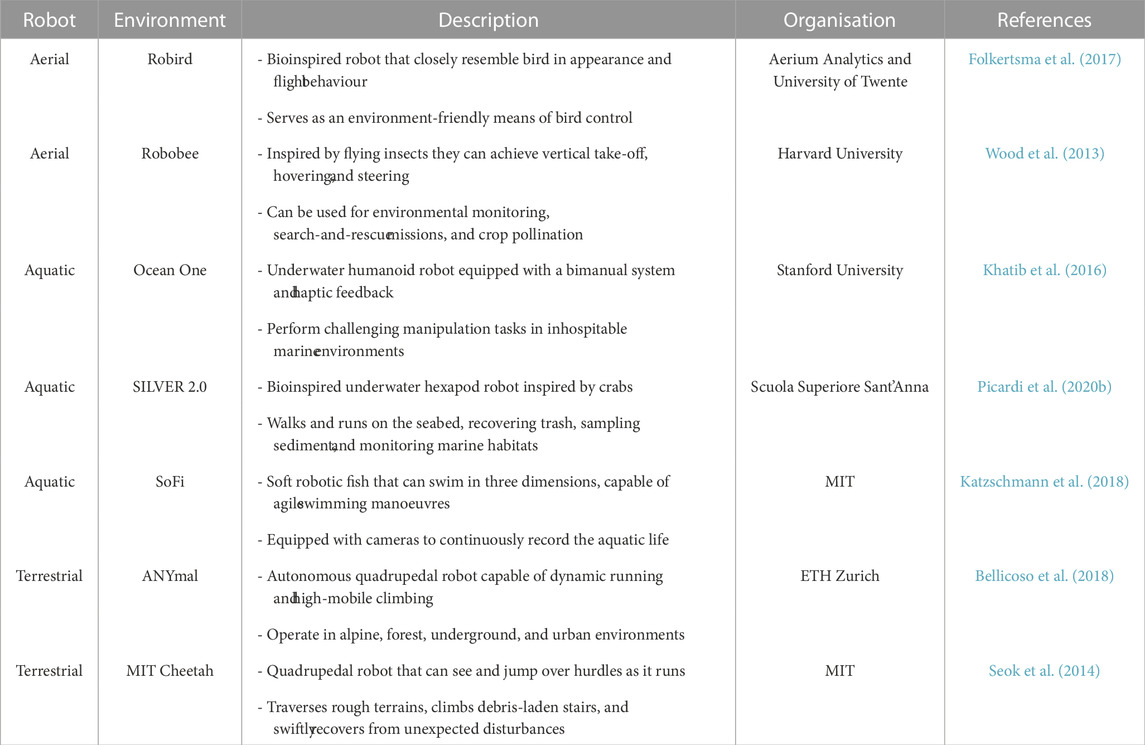
TABLE 2. Bioinspired robots used for exploring natural environment with potential application for nature conservation.
In this perspective, we highlight the growing field of bioinspired robotics in the context of conservation. We discuss the potential ways in which bioinspired robots can perform exploration, data collection, monitoring, maintenance, and intervention tasks while minimally influencing the natural state of the environment and its inhabitants. We summarize the operating and environmental considerations that must be fulfilled for bioinspired robots to be used as an effective conservation tool. Finally, we present additional avenues that can be explored using bioinspired robots that should further enhance its role as an effective tool to protect and preserve our natural world.
We approach the development of bioinspired robots for conservation in two parts. First, the operating considerations that guide its development to ensure its longevity, sustainability, and usefulness in field operations (Figure 1D). Second, the environmental considerations that are dictated by conditions specific to terrestrial, aerial, and aquatic environments which influence the robots interaction with the environment.
Recent advancements in bioinspired robotics have led to the development of robots that can move and adapt to various environments using different modes of animal-like locomotion (Lock et al., 2013). For example, Salamandra robotica II is a bioinspired robot that can operate in land and water (Crespi et al., 2013). This kind of multimodal capability is extremely relevant for conservation efforts, as many ecological phenomena are interconnected across different environments. Additionally, development of bioinspired robots with specialized locomotory capabilities has allowed navigating challenging environments such as walking on water (Chen et al., 2018), climbing up walls (Spenko et al., 2008), and running on the seabed (Picardi et al., 2020b). These new capabilities can eventually expand the scope of conservation efforts around the world, and introduce bioinspired robots to more hazardous and remote environments to help collect data and perform intervention tasks for conservation. Recent advancements in bioinspired locomotion utilizing animal-like propulsion methods can also enable effective monitoring and engagement with the natural environment, while mitigating issues related to noise pollution (Picardi et al., 2020a), and disturbance to the environment’s natural state (Katzschmann et al., 2018).
The increase in accessibility through enhanced locomotion capabilities will potentially increase the opportunities to perform intervention and maintenance tasks. Intervention often involves robotic manipulators that can delicately handle an organism in its natural setting. Soft robotic arms with tactile feedback from embedded sensors will provide a safer alternative to conventional hard-material robotics, allowing the robots to safely interact with living organisms (Shintake et al., 2018; Liu et al., 2020; Gruber and Wood, 2022).
Overall, developing robots with environment specific locomotion and manipulation capabilities inspired by the inhabiting organisms will allow robots to enter previously inaccessible spaces and interact in novel and more natural ways with their surroundings to perform activities ranging from data collection to intervention and maintenance (Figures 1E–G).
In conservation activities, exploration and data collection often require using robots repeatedly in rugged and harsh conditions which can lead to wear and tear on their structures. Furthermore, operating in harsh environments increases the risk of experiencing accidents and/or failures. The use of adaptive structures, high-performance materials, and self-cleaning mechanisms can increase the durability of these robots. Adaptive structures, which can vary in shape and/or stiffness, can better withstand changing environmental conditions and tasks, reducing the stresses on the body (Cully et al., 2015; Khaheshi and Rajabi, 2022). They also provide added functionality and cost-effectiveness. High-performance materials can provide strength, resilience, and corrosion resistance to the robot’s structural components (Pan et al., 2020). The incorporation of flexible electronics can allow the robot to withstand physical stressors from the environment and maintain performance and durability to extend its operating window (Huang et al., 2019; Phillips et al., 2022). The use of self-healing materials will further increase the robot’s operational window in unpredictable environments and bring it closer to achieving autonomous field operation. Eventually, these material considerations can increase the robot’s durability, and potentially reduce costs and electronic waste, paving the way for their widespread and long-term use in conservation (Tan et al., 2021; Terryn et al., 2021).
It is important to carefully evaluate different approaches and weigh their trade-offs when selecting materials and mechanisms to improve the durability of conservation robots. For instance, while adaptive structures can enhance robustness and functionality, they may also increase costs. Similarly, self-healing materials can improve the operational window, but their advanced and costly manufacturing process can pose a challenge. To determine the most appropriate option, one must consider the specific needs and requirements of the conservation activities, as well as the environmental conditions and potential risks associated with operating the robots in those conditions.
Biologically inspired intelligence involves incorporating biological strategies, mechanisms, and structures into robotics research and has been investigated as a means to develop more efficient methodologies and technologies for addressing existing challenges (Li et al., 2021). Integrating biologically inspired intelligence into robots intended for use in exploration, data collection, and monitoring can impart characteristics such as adaptability, robustness, versatility, and agility. These characteristics are crucial to safely navigate complex unknown environments. They can also enable smooth transitions between locomotion modes when moving from one environment to another (e.g., aerial to arboreal or terrestrial to aquatic) (George Thuruthel et al., 2021; Biewener et al., 2022; Miki et al., 2022).
Moreover, the field of neuromorphic computing and engineering, which involves creating computational systems based on biological structures, has made significant advancements and has the potential to enhance bioinspired robots’ real-time interaction with the physical world (Zhao et al., 2020; Christensen et al., 2022). The development of controllers that can adapt to damages and morphological changes in bioinspired robots will be a significant leap forward in the exploration of hazardous environments. They can enable the control of shape-morphing multi-modal robots, which can change their form and functionality to better navigate and operate in different conditions.
Based on the conservation task, robots should be able to exhibit collective behavior to perform tasks beyond the capabilities of a single individual, with minimal explicit communication (Dorigo et al., 2013; McGuire et al., 2019; Berlinger et al., 2021). This type of collective intelligence, known as swarm intelligence (Schranz et al., 2021), is particularly useful for studying spatio-temporal phenomena such as wastewater plumes, oil spills, convection, and biologically active layers that require simultaneous sampling at multiple locations (Schill et al., 2018). Swarm systems, unlike single robot systems, can continue functioning even if individual robots fail or need to be removed, as they can adapt to changes in the number of robots using only local communication (Jaffe et al., 2017). Swarm robotics has already demonstrated its effectiveness within the field of high precision agriculture (Kondoyanni et al., 2022). Initiatives such as ‘Mobile Agriculture Robot Swarm’ (Blender et al., 2016) have harnessed the capabilities of swarm robots to execute various intricate farming tasks, typically associated with human involvement. This utilisation has led to enhanced crop yields and a decreased ecological footprint. Analogously, comparable swarm robotics systems hold promise for monitoring, intervention, and maintenance tasks aimed at the preservation of natural ecosystems. For example, in the project, CoCoRo (Schmickl et al., 2011), a swarm of robots was designed to navigate though underwater habitat while coordinating the swarm members through bioinspired and biomimetic algorithms. Similar to a school of fish, they engaged in the exchange of information to monitor, maintain, and harvest resources in the underwater environment.
One of the main challenges in achieving full robot autonomy in field operation is the limited capacity of energy storage systems, particularly battery cells, which have not undergone significant changes in design and efficiency. Robots with traditional lithium-ion batteries must be frequently retrieved to replace/recharge the battery followed by redeployment, limiting the duration and economic feasibility of field operations, especially in remote and hostile environments. This is particularly challenging in microrobots which deal with low battery life resulting, at times, in the use of a tether (Lok et al., 2017). Alternative energy dense options using hydraulic fluids could facilitate increased energy density, autonomy, efficiency, and multi-functionality in future robot designs (Aubin et al., 2019). Eventually, robots in field operation should be capable of harvesting energy from renewable sources and/or receive energy wirelessly to supplement or replace their on-board energy source. These capabilities aim to reduce the environmental impact of electronic waste and significantly extend the robot’s operational window (Liang et al., 2022). For example, EcoBot III, which has an organic digestive system to power itself, demonstrates the advancements in energy harvesting capabilities in robots. (Ieropoulos et al., 2010).
Efficient and intelligent robot controllers can significantly improve a robot’s autonomy and working window by reducing energy consumption and optimizing the decision-making process. Consequently, robots can operate for extended periods without requiring frequent battery replacements, leading to cost savings and improved operational efficiency (Li et al., 2020).
Successful retrieval of the robot after completion of its task is critical; we propose bioinspired robots as a tool to remedy the harmful environmental impacts rather than an enabler of environmental degradation. Swarm robots exemplify the importance of biodegradibility where multiple robots are in use to perform a task and the unsuccessful retrieval of one or more individual robots can negatively impact the environment. The development of small fully biodegradable robots can allow their deployment in vast numbers to inaccessible locations for conservation tasks before safely biodegrading into the environment (Kim et al., 2022; Rumley et al., 2023).
A variety of biodegradable materials including cellulose/carboxymethylcellulose, polylactic acid (PLA), and polypropylene fumarate (PPF) can be utilized to create biodegradable structure of the robots which can degrade after accomplishing their specified mechanical function in the field (Sethi et al., 2022). However, to achieve complete biodegradability, electronics and energy source must also be made biodegradable. Though advances have been made in the field of biodegradable electronics (Tan et al., 2016), the developments on a biodegradable energy source like Microbeal Fuel Cells (MFCs) remains extremely challenging. MFC-equipped robots present several challenges while operating in a natural environment, which include the need for nutrient rich liquid feedstocks (Ieropoulos et al., 2010), low power output, and vulnerability to the infection of bacteria or fungus. This limits their operational scope and confines the usage to slow or passive tasks. However, recent progress on MFCs, particularly in reactor configuration and system architecture, separator, and cathode catalyst is promising to achieve the goal of completely biodegradable robots (Gajda et al., 2018; Winfield et al., 2019).
An alternative sustainable approach involves substituting the conventional digital sensors on the robot with bioindicators for the purpose of monitoring and assessing environmental conditions. Bioindicators encompass living organisms like plants, plankton, animals, and microbes, which are employed to evaluate the ecological wellbeing of the natural surroundings (Holt and Miller, 2011). For instance, in the project Robocoenosis, Zebra mussels and Daphnia were used as living sensors to monitor natural underwater environments (Rajewicz et al., 2022). This strategy reduces reliance on non-biodegradable components within the robot’s sensing system. Furthermore, analysing the bioindicators in the environment via camera visuals from the robot can minimise the dependence on other traditional sensors. For instance, urban areas can incorporate lichens or fungi onto building walls. These biological indicators serve to reflect the air quality within the city (Matos et al., 2019; Ilgün et al., 2022). Employing an aerial robot with an onboard camera to assess the coloration of these structures can provide insights into the air quality.
Robots functioning in a natural environment require regular maintenance tasks like cleaning, lubrication, and inspection, along with the repairing or replacing of robot’s components that have experienced wear and damage. Furthermore, different ecological environments impose specific technological challenges for the robot’s optimal functionality (Figures 1A–C). These specific challenges in bioinspired robots to foster conservation in terrestrial, aerial/arboreal, and marine environments are described below:
Terrestrial conservation tasks require the robot to perform in urban, rural, and natural environmental conditions. Successful operation would require a combination of locomoting and perceiving capabilities that allow the robot to adapt to different terrains and surface properties (hardness, slipperiness, or irregularities). The integration of proprioception and exteroception coupled with the capability to move like animals can make robots versatile and effective on substrates such as sand, snow, and vegetation. A recent study that incorporated these principles in a legged robot has shown the potential for successful navigation in diverse environments, including alpine, forest, underground, and urban settings (Miki et al., 2022).
One of the significant challenges facing terrestrial robotics is the problem of path planning (Figure 1B). Path planning by building a map in a distributed manner by a swarm of legged robots is one of the solutions to this challenge (Ramachandran et al., 2020). The integration of terrestrial robots with aerial robots presents another promising solution to this challenge. By utilizing visual mapping information provided by aerial robots, terrestrial robots can plan traversable paths and achieve their desired goals with increased efficiency and effectiveness (Käslin et al., 2016).
Operating in aerial and arboreal environments requires counteracting the pull of gravity while performing the conservation task at hand. In addition to flapping robots (Yousaf et al., 2021), developing bioinspired robots that can takeoff from and move on uneven vertical substrates, glide, and perch will significantly expand the scope of conservation efforts to include entering forest canopies, collecting samples, and easily transition from arboreal to aerial environments and vice-versa (Figure 1D). Moving on vertical substrates will allow close inspection and maintenance tasks while eliminating human risk (Spenko et al., 2008). Unlike UAVs, perching and grasping will reduce the reliance on lift generation and thus energy expended. It will also enable the robot to hold position with minimal control effort which is often required for data collection (Roderick et al., 2021; Siddall et al., 2021; Chellapurath et al., 2022). Glide capabilities, like in animals (Zhao et al., 2019; Khandelwal and Hedrick, 2022), can increase the flight time by reducing the dependence on powered flight, reduce noise pollution and make them more robust to aerial perturbations.
In an underwater environment, the robot experiences additional forces associated with water, such as buoyancy, hydrodynamic drag, and added-mass effect, which must be taken into account during the design, control, and maintenance of the robot (Picardi et al., 2020b; Katzschmann et al., 2018). Additionally, the pressure experienced by an object increases by 1 atm for every 10 m of depth, requiring all electronic components in a robot to be sealed in rigid watertight canisters, limiting the flexibility of designing compliant and soft bioinspired robots for use at extreme depths. Moreover, the underwater structures require high maintenance as they are highly prone to corrosion and fouling.
Recent advancements in technology have led to the development of an untethered soft robot for deep-sea exploration, utilizing a self-powered design inspired by the structure of a deep-sea snailfish. The delicate electronic components are embedded and distributed within a soft silicone material which eliminates the need for pressure-resistant cases. This innovative design holds potential for future deep-sea exploration and research (Li et al., 2021).
Underwater visibility issues are also encountered by robots. However, aquatic creatures have adapted sensory mechanisms to overcome these challenges. Seals, for instance, can detect and monitor herrings up to 180 m away by utilizing their wavy whiskers (Zheng et al., 2021). In addition, fish possess mechanosensory lateral-line systems that allow them to perceive and detect their hydrodynamic and physical surroundings (Mogdans, 2019). These natural mechanisms can serve as a source of inspiration for the development of sensor systems in underwater robotics.
Moreover, in the aquatic ecosystem, biological functions from nutrient cycle to energy transfer in food webs see a strong coupling between pelagic and benthic zones (Griffiths et al., 2017). To have a broader understanding on ocean and freshwater ecosystems, data has to be gathered from both zones. Moreover, there is also a need for precise close-range 3D acquisition of benthic environment (Bruno et al., 2011), for example, monitoring the growth of coral reefs. Hence, together with pelagic robots (Yu et al., 2016; Morimoto et al., 2018; Romano et al., 2022), focus is also needed on robots that can perform exploration and monitoring in the benthic region (Picardi et al., 2020b).
Conservation efforts are critical to combat the deteriorating health of our planet. In this perspective, we discuss the development of bioinspired robots as versatile agents that can significantly expand the scope and effectiveness of conservation efforts around the world while minimizing the negative impact on organisms and the environment’s natural state.
Achieving a future where bioinspired robots can perform conservation tasks of exploration, data collection, intervention, and maintenance requires developing novel capabilities, akin to how animals move, sense, and interact in the natural world. Such capabilities can be realized through the concept of physical artificial intelligence, i.e., co-evolving the morphology, actuation, control, and sensing of physical systems can provide them with capabilities to perform tasks akin to intelligent organisms (Miriyev and Kovač, 2020). Moreover, the development of such capabilities can benefit from studies on the biomechanics, ecology, and sensing in animals which provide insights into the physical and behavioral basis of how organisms adapt, move, and interact in different ecosystems (Jackson et al., 2016). Overall, the understanding gained from organisms coupled with the concept of physical artificial intelligence creates a paradigm for researchers on ‘how’ to create versatile robots that are skilful to manipulate unknown objects, move in unpredictable complex environments, and interact with surrounding organisms. (Kanko et al., 2021; Bicer et al., 2022).
However, the development of robots with animal-like capabilities alone cannot lead to their effective and widespread use in future conservation efforts. Here, we present additional considerations for the robot that include interdisciplinary research collaboration, practicality in research and field operations, and applicability as interactive agents for conservation.
Tight collaborations between engineers, biologists, and conservationists is critical to develop bioinspired robots that function like animals and can gather relevant data that is required for the conservation task. Through such collaborations, roboticists/engineers can build bioinspired robots meeting the specific needs of conservation biologists, and in turn conservation biologists can provide valuable expertise on the behaviors, habitats, and ecosystems that the robots will be interacting with (Berger-Tal and Lahoz-Monfort, 2018; Schulz et al., 2023). Furthermore, wherever possible, involving the local communities during the development, maintenance, and troubleshooting process of the bioinspired robot will ensure that conservation efforts are sustainable and effective in the long-term without assistance from researchers.
Bioinspired robots must be a cost-effective proposition to significantly contribute towards conservation, especially since conservation projects often have limited budgets. A purpose built bioinspired robot for a conservation task should be favored over a general purpose robot since the former will minimize the hardware and software requirements and drastically reduce the cost (Byagathvalli et al., 2021). Additionally, the use of easily available components, low cost fabrication/manufacturing techniques, and modular and scalable designs can further reduce the robot’s cost and upkeep (Thomas and Gilbert, 2014). For example, a modular design can help with troubleshooting to ensure rapid turnaround times between repair and redeployment of the robot in field operations (Brooks et al., 2005; Thomas and Gilbert, 2014). Finally, utilizing and publishing open-source designs and technology will enable conservationists and researchers to readily adapt the designs for other research, environmental, and conservation purposes (Kulkarni, 2019).
Commercial bio-hybrid implementations such as smart beehives and virtual fences are testament to the potential and practicality of technology in facilitating conservation tasks (Jachowski et al., 2014). Bioinspired implementations have also been developed such as ‘Spot’ from Boston Dynamics and ‘ANYmal’ from ETH (Hutter et al., 2016), demonstrating that such technology is readily being adopted for commercial applications and is not limited to academia. However, these robots are expensive, making them out of reach for most conservation projects. In the future, cost reduction through commercial use and scaling up production can make direct purchase from companies a viable option.
Overall, accounting for collaboration and practicality during the development phase of the robot considerations can further expand the potential impact of the bioinspired robot by facilitating its wider adoption among the conservation and research community.
With capabilities that allow bioinspired robots to move, sense, and interact like animals, they can be deployed in close proximity to wildlife and enter previously inaccessible environments to collect data or perform intervention and maintenance tasks (Figures 1E–G). This versatility extends their use beyond these conventional conservation tasks, offering researchers the opportunity to explore diverse and novel applications.
Nobel laureates, Konrad Lorenz and Nikolaas Tinbergen conducted pioneering experiments using mechanical dummies that look like animals to study animal behaviour in controlled settings (Burkhardt Jr, 2014). Their studies laid the foundation for integrating biomimetic devices into living systems (Webb, 2000; Krause et al., 2011). Recent advancements in bioinspired and biomimetic robotics have facilitated the development of artificial systems that can interact with living systems in increasingly creative ways. The interactions between these artificial devices and living organisms are evolving into influential bio-hybrid agents, with the potential to significantly contribute to ecosystem conservation efforts (Ilgün et al., 2021). For example, biomimetic fish robot, Robofish, which was used to investigate the collective behaviour of fish like recruitment and leadership (Faria et al., 2010). In the LEURRE project, an integration of American cockroaches and miniature insect-like robots known as Insbots was established, creating an experimental mixed society. The fundamental aim of this initiative was to demonstrate the possible control of these mixed societies, which is a key challenge in many scientific fields, including ethology (Caprari et al., 2005). Recently, researchers were successful to study the dance-following behaviour in bees using a robotic bee called ‘Robobee’ (Landgraf et al., 2018).
These social integration of robots into animal societies is referred as ‘organismic augmentation’ (Schmickl et al., 2021). Such augmentations can also create artificial ecological interactions via inter and/or intra species communications to influence the behaviour of the animals at their society level, which ultimately affects the ecosystem in which the society is embedded (Bonnet et al., 2019; Lazic and Schmickl, 2021). This new paradigm of ‘ecosystem hacking’ (Stefanec et al., 2022) via organismic augmentation can positively effect the ecosystem stability or at least slow down the ecosystem decay.
Additionally, the ‘interactive’ bioinspired robots (Datteri, 2020) can potentially be used to train captive animals before their reintroduction into their natural habitats. Moreover, these robots can mitigate human-wildlife conflicts, such as using robot wolves instead of electric fences to safeguard agricultural fields from wildlife (Bendel, 2022), or utilizing bird-inspired flapping robots to deter birds from congregating near airports during flight operations (Patel and Rughani, 2022). Bioinspired robots can also be used to non-invasively study animal behavior and locomotion in the wild (Datteri, 2020; Romano et al., 2020; Li et al., 2022), as shown in studies on bat echolocation (Bou Mansour et al., 2019) and locust jumping direction (Romano et al., 2019). Ethorobotics, a growing field of biorobotics, proposes leveraging robotic replicas as an innovative approach for exploring animal behavior (Romano et al., 2020), like social learning in vertebrates (Romano et al., 2021) and zebrafish shoaling (Ruberto et al., 2016).
The valuable insights gained through these interactions can help conservation biologists better understand their animal of interest and assist them in designing tailored and effective conservation strategies.
Leveraging advancements in design, materials, intelligence, and energy harvesting is leading to the rapid evolution of bioinspired robots. Specifically, improved locomotory capabilities allow them to overcome operational challenges in terrestrial, aquatic, aerial, and arctic environments. The animal-like appearance and behavior allow easy-integration into the natural environment and interact with the surrounding while minimizing disturbance to inhabitants and preserving the environment’s natural state. Altogether, these capabilities make them versatile agents for future conservation efforts by overcoming current limitations of human-led conservation activities.
Through this perspective, we provide a framework for researchers to develop bioinspired robots with animal-like capabilities that have the potential to revolutionize conservation efforts around the world. These robots can offer sustainable and effective ways to explore uncharted environments, carry out ecological field missions, facilitate data collection and monitoring in extensive, standardized, and repeatable ways, and carry out intervention and maintenance tasks in an efficient and precise manner.
To further strengthen conservation efforts, we highlight the importance of fostering conservation through interdisciplinary collaboration, considering the practicality in research and field operations, and exploring diverse applications. We hope that this piece will encourage future researchers to design and develop bioinspired robots catering to the pressing issue of conservation that is critical to save our planet from rapid biodiversity loss and improve the overall wellbeing of all its inhabitants.
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
MC conceived the perspective. MC and PK conceptualized and outlined the perspective. MC, PK, and AS performed literature review, writing, and reviewing of the manuscript. All authors contributed to the article and approved the submitted version.
We would like to thank the open-source images of organisms platform Phylopic for providing us with silhouettes to use for Figure 1. The authors thank the International Max Planck Research School for Intelligent Systems (IMPRS-IS) for supporting AS. This was supported by Max Planck Society.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Amelia, T. S. M., Khalik, W. M. A. W. M., Ong, M. C., Shao, Y. T., Pan, H. J., and Bhubalan, K. (2021). Marine microplastics as vectors of major ocean pollutants and its hazards to the marine ecosystem and humans. Prog. Earth Planet. Sci. 8, 12–26. doi:10.1186/s40645-020-00405-4
Anderson, B. A. (2007). A literature review of the effects of helicopter disturbance and noise on selected wildlife species. Avaliable At: http://northslopescience.org/dataset/2585.
Aubin, C. A., Choudhury, S., Jerch, R., Archer, L. A., Pikul, J. H., and Shepherd, R. F. (2019). Electrolytic vascular systems for energy-dense robots. Nature 571, 51–57. doi:10.1038/s41586-019-1313-1
Beck Eichler, P. P., and Barker, C. P. (2020). “Surfers of bottom water masses as narrators: water masses and geo properties interaction as benthic habitats for foraminiferal bio indicators,” in Benthic foraminiferal ecology: Indicators of environmental impacts. Editors P. P. Beck Eichler, and C. P. Barker (Cham: Spinger), 71–84. doi:10.1007/978-3-030-61463-8_4
Bellicoso, C. D., Bjelonic, M., Wellhausen, L., Holtmann, K., Günther, F., Tranzatto, M., et al. (2018). Advances in real-world applications for legged robots. J. Field Robotics 35, 1311–1326. doi:10.1002/rob.21839
Bendel, O. (2022). Passive, active, and proactive systems and machines for the protection and preservation of animals and animal species. Front. Animal Sci. 3, 834634. doi:10.3389/fanim.2022.834634
Berger-Tal, O., and Lahoz-Monfort, J. J. (2018). Conservation technology: the next generation. Conserv. Lett. 11, e12458. doi:10.1111/conl.12458
Berlinger, F., Gauci, M., and Nagpal, R. (2021). Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm. Sci. Robotics 6, eabd8668. doi:10.1126/scirobotics.abd8668
Bicer, M., Phillips, A. T., Melis, A., McGregor, A. H., and Modenese, L. (2022). Generative deep learning applied to biomechanics: A new augmentation technique for motion capture datasets. J. Biomechanics 144, 111301. doi:10.1016/j.jbiomech.2022.111301
Biewener, A. A., Bomphrey, R. J., Daley, M. A., and Ijspeert, A. J. (2022). Stability and manoeuvrability in animal movement: lessons from biology, modelling and robotics. Proc. R. Soc. B 289, 20212492. doi:10.1098/rspb.2021.2492
Blender, T., Buchner, T., Fernandez, B., Pichlmaier, B., and Schlegel, C. (2016). “Managing a mobile agricultural robot swarm for a seeding task,” in IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23-26 October 2016 (IEEE), 6879–6886. doi:10.1109/IECON.2016.7793638
Bonnet, F., Mills, R., Szopek, M., Schönwetter-Fuchs, S., Halloy, J., Bogdan, S., et al. (2019). Robots mediating interactions between animals for interspecies collective behaviors. Sci. Robotics 4, eaau7897. doi:10.1126/scirobotics.aau7897
Boström-Einarsson, L., Babcock, R. C., Bayraktarov, E., Ceccarelli, D., Cook, N., Ferse, S. C., et al. (2020). Coral restoration–A systematic review of current methods, successes, failures and future directions. PLOS ONE 15, e0226631. doi:10.1371/journal.pone.0226631
Bou Mansour, C., Koreman, E., Steckel, J., Peremans, H., and Vanderelst, D. (2019). Avoidance of non-localizable obstacles in echolocating bats: A robotic model. PLOS Comput. Biol. 15, e1007550. doi:10.1371/journal.pcbi.1007550
Brooks, A., Kaupp, T., Makarenko, A., Williams, S., and Oreback, A. (2005). “Towards component-based robotics,” in 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 02-06 August 2005 (IEEE), 163–168. doi:10.1109/IROS.2005.1545523
Bruno, F., Bianco, G., Muzzupappa, M., Barone, S., and Razionale, A. V. (2011). Experimentation of structured light and stereo vision for underwater 3D reconstruction. ISPRS J. Photogrammetry Remote Sens. 66, 508–518. doi:10.1016/j.isprsjprs.2011.02.009
Burkhardt, R. W. (2014). Tribute to tinbergen: putting niko tinbergen’s ‘four questions’ in historical context. Ethology 120, 215–223. doi:10.1111/eth.12200
Butler, Z., Corke, P., Peterson, R., and Rus, D. (2006). From robots to animals: virtual fences for controlling cattle. Int. J. Robotics Res. 25, 485–508. doi:10.1177/0278364906065375
Byagathvalli, G., Challita, E. J., and Bhamla, M. S. (2021). Frugal science powered by curiosity. Industrial Eng. Chem. Res. 60, 15874–15884. doi:10.1021/acs.iecr.1c02868
Camarretta, N., Harrison, P. A., Bailey, T., Potts, B., Lucieer, A., Davidson, N., et al. (2020). Monitoring forest structure to guide adaptive management of forest restoration: A review of remote sensing approaches. New For. 51, 573–596. doi:10.1007/s11056-019-09754-5
Candiroglu, B., and Gungor, N. D. (2017). Cave ecosystems: microbiological view. Eur. J. Biol. 76, 36–42. doi:10.5152/EurJBiol.2017.1707
Caprari, G., Colot, A., Siegwart, R., Halloy, J., and Deneubourg, J. L. (2005). Animal and robot mixed societies: building cooperation between microrobots and cockroaches. IEEE Robotics Automation Mag. 12, 58–65. doi:10.1109/MRA.2005.1458325
Ceballos, G., Ehrlich, P. R., Barnosky, A. D., García, A., Pringle, R. M., and Palmer, T. M. (2015). Accelerated modern human–induced species losses: entering the sixth mass extinction. Sci. Adv. 1, e1400253. doi:10.1126/sciadv.1400253
Cecchi, S., Spinsante, S., Terenzi, A., and Orcioni, S. (2020). A smart sensor-based measurement system for advanced bee hive monitoring. Sensors (Basel, Switz. 20, 2726. doi:10.3390/s20092726
Chellapurath, M., Khandelwal, P., Rottier, T., Schwab, F., and Jusufi, A. (2022). Morphologically adaptive crash landing on a wall: soft-bodied models of gliding geckos with varying material stiffnesses. Adv. Intell. Syst. 4, 2200120. doi:10.1002/aisy.202200120
Chellapurath, M., Noble, S., and Sreejalekshmi, K. (2021a). Design and kinematic analysis of flapping wing mechanism for common swift inspired micro aerial vehicle. Proc. Institution Mech. Eng. Part C J. Mech. Eng. Sci. 235, 4026–4036. doi:10.1177/0954406220974046
Chellapurath, M., Walker, K. L., Donato, E., Picardi, G., Stefanni, S., Laschi, C., et al. (2021b). Analysis of station keeping performance of an underwater legged robot. IEEE/ASME Trans. Mechatronics 27, 3730–3741. doi:10.1109/TMECH.2021.3132779
Chen, Y., Doshi, N., Goldberg, B., Wang, H., and Wood, R. J. (2018). Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot. Nat. Commun. 9, 2495–2511. doi:10.1038/s41467-018-04855-9
Christensen, D. V., Dittmann, R., Linares-Barranco, B., Sebastian, A., Le Gallo, M., Redaelli, A., et al. (2022). 2022 roadmap on neuromorphic computing and engineering. Neuromorphic Comput. Eng. 2, 022501. doi:10.1088/2634-4386/ac4a83
Christiansen, F., Rojano-Doñate, L., Madsen, P. T., and Bejder, L. (2016). Noise levels of multi-rotor unmanned aerial vehicles with implications for potential underwater impacts on marine mammals. Front. Mar. Sci. 3, 277. doi:10.3389/fmars.2016.00277
Crespi, A., Karakasiliotis, K., Guignard, A., and Ijspeert, A. J. (2013). Salamandra robotica II: an amphibious robot to study salamander-like swimming and walking gaits. IEEE Trans. Robotics 29, 308–320. doi:10.1109/TRO.2012.2234311
Cully, A., Clune, J., Tarapore, D., and Mouret, J. B. (2015). Robots that can adapt like animals. Nature 521, 503–507. doi:10.1038/nature14422
Daily, G. C. (1997). “Introduction: what are ecosystem services,” in Nature’s services: Societal dependence on natural ecosystems. Editor G. C. Daily (Washington, DC, USA: Island Press), 1–10.
Datteri, E. (2020). The logic of interactive biorobotics. Front. Bioeng. Biotechnol. 8, 637. doi:10.3389/fbioe.2020.00637
Dorigo, M., Floreano, D., Gambardella, L. M., Mondada, F., Nolfi, S., Baaboura, T., et al. (2013). Swarmanoid: A novel concept for the study of heterogeneous robotic swarms. IEEE Robotics Automation Mag. 20, 60–71. doi:10.1109/MRA.2013.2252996
Dunbabin, M., Manley, J., and Harrison, P. L. (2020). “Uncrewed maritime systems for coral reef conservation,” in Global Oceans 2020: Singapore–US Gulf Coast, Biloxi, MS, USA, 05-30 October 2020 (IEEE), 1–6. doi:10.1109/IEEECONF38699.2020.9389173
Faria, J. J., Dyer, J. R., Clément, R. O., Couzin, I. D., Holt, N., Ward, A. J., et al. (2010). A novel method for investigating the collective behaviour of fish: introducing ‘robofish. Behav. Ecol. Sociobiol. 64, 1211–1218. doi:10.1007/s00265-010-0988-y
Folkertsma, G. A., Straatman, W., Nijenhuis, N., Venner, C. H., and Stramigioli, S. (2017). Robird: a robotic bird of prey. IEEE Robot. Autom. Mag. 24 (3), 22–29. doi:10.1109/MRA.2016.2636368
Gajda, I., Greenman, J., and Ieropoulos, I. A. (2018). Recent advancements in real-world microbial fuel cell applications. Curr. Opin. Electrochem. 11, 78–83. doi:10.1016/j.coelec.2018.09.006
Gao, X., Li, J., Fan, L., Zhou, Q., Yin, K., Wang, J., et al. (2018). Review of wheeled mobile robots’ navigation problems and application prospects in agriculture. IEEE Access 6, 49248–49268. doi:10.1109/ACCESS.2018.2868848
George Thuruthel, T., Picardi, G., Iida, F., Laschi, C., and Calisti, M. (2021). Learning to stop: A unifying principle for legged locomotion in varying environments. R. Soc. Open Sci. 8, 210223. doi:10.1098/rsos.210223
Gravish, N., and Lauder, G. V. (2018). Robotics-inspired biology. J. Exp. Biol. 221, jeb138438. doi:10.1242/jeb.138438
Griffiths, J. R., Kadin, M., Nascimento, F. J., Tamelander, T., Törnroos, A., Bonaglia, S., et al. (2017). The importance of benthic–pelagic coupling for marine ecosystem functioning in a changing world. Glob. Change Biol. 23, 2179–2196. doi:10.1111/gcb.13642
Gross, M. (2021). How locusts become a plague. Curr. Biol. 31, 459–461. doi:10.1016/j.cub.2021.05.007
Gruber, D. F., and Wood, R. J. (2022). Advances and future outlooks in soft robotics for minimally invasive marine biology. Sci. Robotics 7, eabm6807. doi:10.1126/scirobotics.abm6807
Hanley, N., and Roberts, M. (2019). The economic benefits of invasive species management. People Nat. 1, 124–137. doi:10.1002/pan3.31
Hendriks, I. E., Duarte, C. M., and Heip, C. H. R. (2006). Biodiversity research still grounded. Science 312, 1715. doi:10.1126/science.1128548
Hodgson, A., Kelly, N., and Peel, D. (2013). Unmanned aerial vehicles (UAVs) for surveying marine fauna: A dugong case study. PLOS ONE 8, e79556. doi:10.1371/journal.pone.0079556
Holt, E., and Miller, S. (2011). Bioindicators: using organisms to measure. Nat. Educ. Knowl. 3, 8–13.
Horton, T. W., Hauser, N., Cassel, S., Klaus, K. F., Fettermann, T., and Key, N. (2019). Doctor drone: non-invasive measurement of humpback whale vital signs using unoccupied aerial system infrared thermography. Front. Mar. Sci. 6, 466. doi:10.3389/fmars.2019.00466
Huang, S., Liu, Y., Zhao, Y., Ren, Z., and Guo, C. F. (2019). Flexible electronics: stretchable electrodes and their future. Adv. Funct. Mater. 29, 1805924. doi:10.1002/adfm.201805924
Hutter, M., Gehring, C., Jud, D., Lauber, A., Bellicoso, C. D., Tsounis, V., et al. (2016). “Anymal-a highly mobile and dynamic quadrupedal robot,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea (South), 09-14 October 2016 (IEEE), 38–44. doi:10.1109/IROS.2016.7758092
Ieropoulos, I., Greenman, J., Melhuish, C., and Horsfield, I. (2010). EcoBot-III-A robot with guts. ALIFE 733, e40.
Ilgün, A., Angelov, K., Stefanec, M., Schönwetter-Fuchs, S., Stokanic, V., Vollmann, J., et al. (2021). “Bio-hybrid systems for ecosystem level effects,” in Alife 2021: The 2021 conference on artificial life Cambridge, MA, USA: Island Press. doi:10.1162/isal/TNQDotTNQ/a_00396
Ilgün, A., Mills, R., Mondada, F., and Schmickl, T. (2022). Mycelial beehives of HIVEOPOLIS: designing and building therapeutic inner nest environments for honeybees. Struct. Archit. A Viable Urban Perspective 7, 75–82. doi:10.3390/biomimetics7020075
Jachowski, D., Slotow, R., and Millspaugh, J. (2014). Good virtual fences make good neighbors: opportunities for conservation. Anim. Conserv. 17, 187–196. doi:10.1111/acv.12082
Jackson, B. E., Evangelista, D. J., Ray, D. D., and Hedrick, T. L. (2016). 3D for the people: multi-camera motion capture in the field with consumer-grade cameras and open source software. Biol. Open 5, 1334–1342. doi:10.1242/bio.018713
Jaffe, J. S., Franks, P. J., Roberts, P. L., Mirza, D., Schurgers, C., Kastner, R., et al. (2017). A swarm of autonomous miniature underwater robot drifters for exploring submesoscale ocean dynamics. Nat. Commun. 8, 14189–14198. doi:10.1038/ncomms14189
Kanko, R. M., Laende, E. K., Davis, E. M., Selbie, W. S., and Deluzio, K. J. (2021). Concurrent assessment of gait kinematics using marker-based and markerless motion capture. J. Biomechanics 127, 110665. doi:10.1016/j.jbiomech.2021.110665
Käslin, R., Fankhauser, P., Stumm, E., Taylor, Z., Mueggler, E., Delmerico, J., et al. (2016). “Collaborative localization of aerial and ground robots through elevation maps,” in 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23-27 October 2016 (IEEE), 284–290. doi:10.1109/SSRR.2016.7784317
Katzschmann, R. K., DelPreto, J., MacCurdy, R., and Rus, D. (2018). Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robotics 3, eaar3449. doi:10.1126/scirobotics.aar3449
Keller, R. P., Frang, K., and Lodge, D. M. (2008). Preventing the spread of invasive species: economic benefits of intervention guided by ecological predictions. Conserv. Biol. 22, 80–88. doi:10.1111/j.1523-1739.2007.00811.x
Khaheshi, A., and Rajabi, H. (2022). Mechanical intelligence (mi): A bioinspired concept for transforming engineering design. Adv. Sci. 9, 2203783. doi:10.1002/advs.202203783
Khandelwal, P. C., and Hedrick, T. L. (2022). Combined effects of body posture and three-dimensional wing shape enable efficient gliding in flying lizards. Sci. Rep. 12, 1793–1811. doi:10.1038/s41598-022-05739-1
Khatib, O., Yeh, X., Brantner, G., Soe, B., Kim, B., Ganguly, S., et al. (2016). Ocean one: A robotic avatar for oceanic discovery. IEEE Robotics Automation Mag. 23, 20–29. doi:10.1109/MRA.2016.2613281
Kim, J., Park, H., and Yoon, C. (2022). Advances in biodegradable soft robots. Polymers 14, 4574. doi:10.3390/polym14214574
Kondoyanni, M., Loukatos, D., Maraveas, C., Drosos, C., and Arvanitis, K. G. (2022). Bio-inspired robots and structures toward fostering the modernization of agriculture. Biomimetics 7, 69. doi:10.3390/biomimetics7020069
Krause, J., Winfield, A. F., and Deneubourg, J. L. (2011). Interactive robots in experimental biology. Trends Ecol. Evol. 26, 369–375. doi:10.1016/j.tree.2011.03.015
Kulkarni, M. (2019). Digital accessibility: challenges and opportunities. IIMB Manag. Rev. 31, 91–98. doi:10.1016/j.iimb.2018.05.009
Landgraf, T., Bierbach, D., Kirbach, A., Cusing, R., Oertel, M., Lehmann, K., et al. (2018). Dancing honey bee robot elicits dance-following and recruits foragers. ArXiv:1803.07126. doi:10.48550/arXiv.1803.07126
Lazic, D., and Schmickl, T. (2021). Can robots inform a honeybee colony’s foraging decision-making? Artif. Life Conf. Proc. 33, 42. doi:10.1162/isal_a_00397
Ledger, S. E., Loh, J., Almond, R., Böhm, M., Clements, C. F., Currie, J., et al. (2023). Past, present, and future of the living planet index. npj Biodivers. 2, 12. doi:10.1038/s44185-023-00017-3
Li, G., Chen, X., Zhou, F., Liang, Y., Xiao, Y., Cao, X., et al. (2021a). Self-powered soft robot in the mariana trench. Nature 591, 66–71. doi:10.1038/s41586-020-03153-z
Li, J., Xu, Z., Zhu, D., Dong, K., Yan, T., Zeng, Z., et al. (2021b). Bio-inspired intelligence with applications to robotics: A survey. Intell. Robotics 1, 8. doi:10.20517/ir.2021.08
Li, L., Ravi, S., and Wang, C. (2022). Editorial: robotics to understand animal behaviour. Front. Robotics AI 9, 963416. doi:10.3389/frobt.2022.963416
Li, P., Wang, Y., Gupta, U., Liu, J., Zhang, L., Du, D., et al. (2019). Transparent soft robots for effective camouflage. Adv. Funct. Mater. 29, 1901908. doi:10.1002/adfm.201901908
Li, T., Zhou, L., Li, Y., Chai, H., and Yang, K. (2020). An energy efficient motion controller based on SLCP for the electrically actuated quadruped robot. J. Bionic Eng. 17, 290–302. doi:10.1007/s42235-020-0023-6
Liang, Z., He, J., Hu, C., Pu, X., Khani, H., Dai, L., et al. (2022). Next-generation energy harvesting and storage technologies for robots across all scales. Adv. Intell. Syst. 5, 45. doi:10.1002/aisy.202200045
Linders, T. E. W., Schaffner, U., Eschen, R., Abebe, A., Choge, S. K., Nigatu, L., et al. (2019). Direct and indirect effects of invasive species: biodiversity loss is a major mechanism by which an invasive tree affects ecosystem functioning. J. Ecol. 107, 2660–2672. doi:10.1111/1365-2745.13268
Liu, J., Iacoponi, S., Laschi, C., Wen, L., and Calisti, M. (2020). Underwater mobile manipulation: A soft arm on a benthic legged robot. IEEE Robotics Automation Mag. 27, 12–26. doi:10.1109/MRA.2020.3024001
Lock, R., Burgess, S., and Vaidyanathan, R. (2013). Multi-modal locomotion: from animal to application. Bioinspiration Biomimetics 9, 011001. doi:10.1088/1748-3182/9/1/011001
Lok, M., Helbling, E. F., Zhang, X., Wood, R., Brooks, D., and Wei, G. Y. (2017). A low mass power electronics unit to drive piezoelectric actuators for flying microrobots. IEEE Trans. Power Electron. 33, 3180–3191. doi:10.1109/TPEL.2017.2704290
Matos, P., Vieira, J., Rocha, B., Branquinho, C., and Pinho, P. (2019). Modeling the provision of air-quality regulation ecosystem service provided by urban green spaces using lichens as ecological indicators. Sci. Total Environ. 665, 521–530. doi:10.1016/j.scitotenv.2019.02.023
McGuire, K., De Wagter, C., Tuyls, K., Kappen, H., and de Croon, G. C. (2019). Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment. Sci. Robotics 4, eaaw9710. doi:10.1126/scirobotics.aaw9710
Miki, T., Lee, J., Hwangbo, J., Wellhausen, L., Koltun, V., and Hutter, M. (2022). Learning robust perceptive locomotion for quadrupedal robots in the wild. Sci. Robotics 7, eabk2822. doi:10.1126/scirobotics.abk2822
Miriyev, A., and Kovač, M. (2020). Skills for physical artificial intelligence. Nat. Mach. Intell. 2, 658–660. doi:10.1038/s42256-020-00258-y
Mogdans, J. (2019). Sensory ecology of the fish lateral-line system: morphological and physiological adaptations for the perception of hydrodynamic stimuli. J. Fish Biol. 95, 53–72. doi:10.1111/jfb.13966
Mohan, M., Richardson, G., Gopan, G., Aghai, M. M., Bajaj, S., Galgamuwa, G. P., et al. (2021). UAV-Supported forest regeneration: current trends, challenges and implications. Remote Sens. 13, 2596. doi:10.3390/rs13132596
Morimoto, Y., Onoe, H., and Takeuchi, S. (2018). Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues. Sci. Robotics 3, eaat4440. doi:10.1126/scirobotics.aat4440
Muscato, G., Bonaccorso, F., Cantelli, L., Longo, D., and Melita, C. D. (2012). Volcanic environments: robots for exploration and measurement. IEEE Robotics Automation Mag. 19, 40–49. doi:10.1109/MRA.2011.2181684
Pan, L., Wang, F., Cheng, Y., Leow, W. R., Zhang, Y. W., Wang, M., et al. (2020). A supertough electro-tendon based on spider silk composites. Nat. Commun. 11, 1332–1339. doi:10.1038/s41467-020-14988-5
Patel, Y., and Rughani, P. H. (2022). “Swarm ornithopter robirds: an architecture to protect aerospace for aerial defense,” in Proceedings of the 2022 3rd international conference on robotics systems and vehicle technology (New York, NY, USA): RSVT), 12–15. doi:10.1145/3560453.3560456
Penick, C. A., Cope, G., Morankar, S., Mistry, Y., Grishin, A., Chawla, N., et al. (2022). The comparative approach to bio-inspired design: integrating biodiversity and biologists into the design process. Integr. Comp. Biol. 62, 1153–1163. doi:10.1093/icb/icac097
Phillips, J. W., Prominski, A., and Tian, B. (2022). Recent advances in materials and applications for bioelectronic and biorobotic systems. View 3, 20200157. doi:10.1002/VIW.20200157
Picardi, G., Borrelli, C., Sarti, A., Chimienti, G., and Calisti, M. (2020a). A minimal metric for the characterization of acoustic noise emitted by underwater vehicles. Sensors 20, 6644. doi:10.3390/s20226644
Picardi, G., Chellapurath, M., Iacoponi, S., Stefanni, S., Laschi, C., and Calisti, M. (2020b). Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robotics 5, eaaz1012. doi:10.1126/scirobotics.aaz1012
Popovic, M. B. (2019). “Bioinspired robots,” in Biomechatronics Cambridge, MA, USA: Academic Press, 495–591. doi:10.1016/C2016-0-04132-3
Rajewicz, W., Romano, D., Varughese, J., Schmickl, T., and Thenius, R. (2022). “Lifeforms potentially useful for automated underwater monitoring systems,” in Alife 2022: The 2022 conference on artificial life Cambridge, MA, USA: Publisher: MIT Press. doi:10.1162/isal_a_00527
Ramachandran, R. K., Kakish, Z., and Berman, S. (2020). Information correlated Lévy walk exploration and distributed mapping using a swarm of robots. IEEE Trans. Robotics 36, 1422–1441. doi:10.1109/TRO.2020.2991612
Roberto, D., Emanuela, F., Jacopo, A., Billett, D., Carugati, L., Cinzia, C., et al. (2020). Ecological variables for developing a global deep-ocean monitoring and conservation strategy. Nat. Ecol. Evol. 4, 181–192. doi:10.1038/s41559-019-1091-z
Roderick, W. R., Cutkosky, M. R., and Lentink, D. (2021). Bird-inspired dynamic grasping and perching in arboreal environments. Sci. Robotics 6, eabj7562. doi:10.1126/scirobotics.abj7562
Romano, D., Benelli, G., Kavallieratos, N. G., Athanassiou, C. G., Canale, A., and Stefanini, C. (2020). Beetle-robot hybrid interaction: sex, lateralization and mating experience modulate behavioural responses to robotic cues in the larger grain borer prostephanus truncatus (horn). Biol. Cybern. 114, 473–483. doi:10.1007/s00422-020-00839-5
Romano, D., Benelli, G., and Stefanini, C. (2019). Encoding lateralization of jump kinematics and eye use in a locust via bio-robotic artifacts. J. Exp. Biol. 222, jeb187427. doi:10.1242/jeb.187427
Romano, D., Benelli, G., and Stefanini, C. (2021). Opposite valence social information provided by bio-robotic demonstrators shapes selection processes in the green bottle fly. J. R. Soc. Interface 18, 20210056. doi:10.1098/rsif.2021.0056
Romano, D., Wahi, A., Miraglia, M., and Stefanini, C. (2022). Development of a novel underactuated robotic fish with magnetic transmission system. Machines 10, 755. doi:10.3390/machines10090755
Ruberto, T., Mwaffo, V., Singh, S., Neri, D., and Porfiri, M. (2016). Zebrafish response to a robotic replica in three dimensions. R. Soc. Open Sci. 3, 160505. doi:10.1098/rsos.160505
Rumley, E. H., Preninger, D., Shagan Shomron, A., Rothemund, P., Hartmann, F., Baumgartner, M., et al. (2023). Biodegradable electrohydraulic actuators for sustainable soft robots. Sci. Adv. 9, eadf5551. doi:10.1126/sciadv.adf5551
Sadeghi, A., Del Dottore, E., Mondini, A., and Mazzolai, B. (2020). Passive morphological adaptation for obstacle avoidance in a self-growing robot produced by additive manufacturing. Soft Robot. 7, 85–94. doi:10.1089/soro.2019.0025
Savage, N. (2022). Bioinspired robots walk, swim, slither and fly. Nature. doi:10.1038/d41586-022-03014-x
Schill, F., Bahr, A., and Martinoli, A. (2018). “Vertex: A new distributed underwater robotic platform for environmental monitoring,” in Distributed autonomous robotic systems: The 13th international symposium New York, NY, USA: Publisher: Springer, 679–693. doi:10.1007/978-3-319-73008-0_47
Schmickl, T., Szopek, M., Mondada, F., Mills, R., Stefanec, M., Hofstadler, D. N., et al. (2021). Social integrating robots suggest mitigation strategies for ecosystem decay. Front. Bioeng. Biotechnol. 9, 612605. doi:10.3389/fbioe.2021.612605
Schmickl, T., Thenius, R., Moslinger, C., Timmis, J., Tyrrell, A., Read, M., et al. (2011). “Cocoro–the self-aware underwater swarm,” in 2011 Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops, Ann Arbor, MI, USA, 03-07 October 2011 (IEEE), 120–126. doi:10.1109/SASOW.2011.11
Schranz, M., Di Caro, G. A., Schmickl, T., Elmenreich, W., Arvin, F., Şekercioğlu, A., et al. (2021). Swarm intelligence and cyber-physical systems: concepts, challenges and future trends. Swarm Evol. Comput. 60, 100762. doi:10.1016/j.swevo.2020.100762
Schulz, A. K., Shriver, C., Stathatos, S., Seleb, B., Weigel, E. G., Chang, Y. H., et al. (2023). Conservation tools: the next generation of engineering–biology collaborations. J. R. Soc. Interface 20, 20230232. doi:10.1098/rsif.2023.0232
Seok, S., Wang, A., Chuah, M. Y., Hyun, D. J., Lee, J., Otten, D. M., et al. (2014). Design principles for energy-efficient legged locomotion and implementation on the MIT cheetah robot. IEEE/ASME Trans. Mechatronics 20, 1117–1129. doi:10.1109/TMECH.2014.2339013
Sethi, S. S., Kovac, M., Wiesemüller, F., Miriyev, A., and Boutry, C. M. (2022). Biodegradable sensors are ready to transform autonomous ecological monitoring. Nat. Ecol. Evol. 6, 1245–1247. doi:10.1038/s41559-022-01824-w
Shintake, J., Cacucciolo, V., Floreano, D., and Shea, H. (2018). Soft robotic grippers. Adv. Mater. 30, 1707035. doi:10.1002/adma.201707035
Siddall, R., Byrnes, G., Full, R. J., and Jusufi, A. (2021). Tails stabilize landing of gliding geckos crashing head-first into tree trunks. Commun. Biol. 4, 1020–1112. doi:10.1038/s42003-021-02378-6
Spenko, M. J., Haynes, G. C., Saunders, J., Cutkosky, M. R., Rizzi, A. A., Full, R. J., et al. (2008). Biologically inspired climbing with a hexapedal robot. J. Field Robotics 25, 223–242. doi:10.1002/rob.20238
Stefanec, M., Hofstadler, D. N., Krajník, T., Turgut, A. E., Alemdar, H., Lennox, B., et al. (2022). A minimally invasive approach towards “ecosystem hacking” with honeybees. Front. Robotics AI 9, 791921. doi:10.3389/frobt.2022.791921
Sward, D., Monk, J., and Barrett, N. (2019). A systematic review of remotely operated vehicle surveys for visually assessing fish assemblages. Front. Mar. Sci. 6, 134. doi:10.3389/fmars.2019.00134
Tan, M. J., Owh, C., Chee, P. L., Kyaw, A. K. K., Kai, D., and Loh, X. J. (2016). Biodegradable electronics: cornerstone for sustainable electronics and transient applications. J. Mater. Chem. C 4, 5531–5558. doi:10.1039/C6TC00678G
Tan, Y. J., Susanto, G. J., Anwar Ali, H. P., and Tee, B. C. (2021). Progress and roadmap for intelligent self-healing materials in autonomous robotics. Adv. Mater. 33, 2002800. doi:10.1002/adma.202002800
Terryn, S., Langenbach, J., Roels, E., Brancart, J., Bakkali-Hassani, C., Poutrel, Q. A., et al. (2021). A review on self-healing polymers for soft robotics. Mater. Today 47, 187–205. doi:10.1016/j.mattod.2021.01.009
Thomas, D. S., and Gilbert, S. W. (2014). Costs and cost effectiveness of additive manufacturing. Natl. Inst. Stand. Technol. 1176, 76. doi:10.6028/NIST.SP.1176
Tuia, D., Kellenberger, B., Beery, S., Costelloe, B. R., Zuffi, S., Risse, B., et al. (2022). Perspectives in machine learning for wildlife conservation. Nat. Commun. 13, 792–815. doi:10.1038/s41467-022-27980-y
Visbeck, M. (2018). Ocean science research is key for a sustainable future. Nat. Commun. 9, 690–694. doi:10.1038/s41467-018-03158-3
Webb, B. (2000). What does robotics offer animal behaviour? Anim. Behav. 60, 545–558. doi:10.1006/anbe.2000.1514
Winfield, J., Rossiter, J., and Ieropoulos, I. (2019). The dawn of biodegradable robots. Washington, DC, USA: American Chemical Society (ACS).
Wood, R., Nagpal, R., and Wei, G. Y. (2013). Flight of the robobees. Sci. Am. 308, 60–65. doi:10.1038/scientificamerican0313-60
Yousaf, R., Shahzad, A., Qadri, M. M., and Javed, A. (2021). Recent advancements in flapping mechanism and wing design of micro aerial vehicles. Proc. Institution Mech. Eng. Part C J. Mech. Eng. Sci. 235, 4425–4446. doi:10.1177/09544062209-60783
Yu, J., Zhang, C., and Liu, L. (2016). Design and control of a single-motor-actuated robotic fish capable of fast swimming and maneuverability. IEEE/ASME Trans. Mechatronics 21, 1711–1719. doi:10.1109/TMECH.2016.2517931
Zhang, G., Shang, B., Chen, Y., and Moyes, H. (2017). “SmartCaveDrone: 3D cave mapping using UAVs as robotic co-archaeologists,” in 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13-16 June 2017 (IEEE), 1052–1057. doi:10.1109/ICUAS.2017.7991499
Zhao, F., Wang, W., Zhang, J., Wyrwa, J., and Sun, F. (2019). Aerodynamic characteristics and pitching adjusting mechanism of the flying squirrel with deployed patagium. IEEE Access 7, 185554–185564. doi:10.1109/ACCESS.2019.2961451
Zhao, J., Risi, N., Monforte, M., Bartolozzi, C., Indiveri, G., and Donati, E. (2020). Closed-loop spiking control on a neuromorphic processor implemented on the iCub. IEEE J. Emerg. Sel. Top. Circuits Syst. 10, 546–556. doi:10.1109/JETCAS.2020.3040390
Zheng, X., Kamat, A. M., Cao, M., and Kottapalli, A. G. P. (2021). Creating underwater vision through wavy whiskers: A review of the flow-sensing mechanisms and biomimetic potential of seal whiskers. J. R. Soc. Interface 18, 20210629. doi:10.1098/rsif.2021.0629
Keywords: biomimetics, bioinspiration, collaboration, locomotion, exploration, monitoring, intervention, maintenance
Citation: Chellapurath M, Khandelwal PC and Schulz AK (2023) Bioinspired robots can foster nature conservation. Front. Robot. AI 10:1145798. doi: 10.3389/frobt.2023.1145798
Received: 16 January 2023; Accepted: 25 September 2023;
Published: 18 October 2023.
Edited by:
Edoardo Datteri, University of Milano-Bicocca, ItalyReviewed by:
Edgar Buchanan, University of York, United KingdomCopyright © 2023 Chellapurath, Khandelwal and Schulz. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mrudul Chellapurath, bXJ1ZHVsY0BrdGguc2U=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.