 Rianne van den Berghe
Rianne van den Berghe- Windesheim Flevoland, Almere, Netherlands
This mini review discusses the use of social robots in a translanguaging pedagogy: the use of robots to enable students to use their full linguistic repertoire within schools, so any language that they speak at home or in another aspect of their lives. Current research on robot-assisted second-language learning is reviewed with the aim of finding out whether students’ languages have been employed strategically to support learning of another language. A total of 83 articles has been analyzed on the use of first and second languages in student-robot interactions. Most interactions were either exclusively in the second language, or exclusively in the first language, with only target words in the second language. Few studies strategically mixed the two languages to bootstrap learning, and only one study used the first language of students with migrant backgrounds to learn the second language. The review concludes with recommendations for future use of social robots in a translanguaging pedagogy.
Introduction
Social robots are useful tools for language education. Their physical and social presence (i.e., embodiment) is an important advantage over other types of technology, such as tablets and computers. This could be a main reason for why social robots are found to be more effective than other types of technology in education in general (Belpaeme et al., 2018) and language education in particular (Lee and Lee, 2022). Robots’ physical and social presence is thought to be more motivating and to elicit more social behavior from interaction partners compared to their virtual counterparts. Moreover, social robots, many of which have a humanoid or animal-like body, often have arms, which allows them to make gestures. Gestures are particularly relevant for language learning, as (human) gestures help convey the meaning of language (e.g., through depicting a word’s meaning, in case of iconic gestures) and thus provide visual support (Rowe et al., 2013; Rohlfing, 2019). A recent review on the use of gestures in robot-assisted (language) learning [RA(L)L] has shown that robot gestures benefit interactions and learning as well (de Wit et al., 2022).
One ability of social robots has been discussed less often: their ability to speak any language. Of course, robots share this ability with other types of technology, which is perhaps why it has received less attention. However, it is particularly relevant in light of a pedagogical approach that has gained momentum over the last couple of years: translanguaging. Translanguaging is the use of students’ full linguistic repertoire within schools (García, 2009). In practice, this means that other languages that students speak beside the school language are positively valued and actively used in communication and learning within the school. For a long time, it was believed that languages should be separated (as mixing languages was thought to confuse multilingual students) and that multilingual students should be immersed in the school language to best learn that language. However, language mixing does not confuse students (de Houwer, 1990; Petitto et al., 2001; Meisel, 2010) and immersion programs are not better than bilingual programs for multilingual students’ language development or wellbeing (Sierens and van Avermaet, 2014). The use of other languages within the school actually supports students in learning the school language (García and Li, 2015; García and Lin, 2017; Günther-van der Meij et al., 2020), in learning other subjects, and in their wellbeing in the school (Hornberger, 2005; Cummins 2008; Creese and Blackledge, 2010; Cummins 2019).
There are dozens of activities using students’ first language (L1) which can be done within schools to support students’ learning. Such activities include: focusing on similarities and differences between the L1 and second language (L2), allowing students to discuss assignments amongst each other in the L1, multilingual label quests (eliciting vocabulary items from students in multiple languages), use of multiple languages in book reading or writing, pre-teaching in the L1 (at home or at school), cognate comparison (comparing similar words in different languages), and target word explanations in the L1 (Ticheloven et al., 2020; Bosma et al., 2022). An issue in translanguaging is that teachers may not know how to engage students in multilingual activities or may be afraid to ‘lose control’ by allowing students to speak other languages. Teachers often do not speak students’ L1s, which leads to difficulties in using these languages in the classroom. This presents unique opportunities to use social robots (and other types of technology) in classroom, as robots are able to speak any language.
The field of (educational) robots has potential to promote inclusiveness (Daniela and Lytras, 2019) and the idea of using social robots as a multilingual agent to mediate between speakers of different language backgrounds is not completely novel. Kim (2016) advocated for social robots as ‘cultural brokers’ to mediate between children of different cultural backgrounds. Multilingual robots or tangibles have been developed for migrant populations in the fields of both healthcare and education (Özcan et al., 2014; Kim et al., 2021) and even to encourage the active use of endangered languages (Taylor et al., 2020). For example, a bilingual robot speaking both Spanish and English was used in the study by Kim et al. (2021) to stimulate positive interactions between children with different language backgrounds. Such efforts are worthwhile to positively engage children of different backgrounds in education, or to ensure that people communicate effectively in healthcare. The focus of the current review is on the educational use of robots, as the main goal of translanguaging is to support learning.
The research question of the current review is how languages have been used so far in RALL research and whether there are opportunities for robots in a translanguaging pedagogy to support multilingual students. Existing reviews on RALL (e.g., Randall, 2019; van den Berghe et al., 2019; Lee and Lee, 2022) have focused on several aspects of robots and how they affect learning. For example, Randall (2019) describes how the form, voice, immediacy, non-verbal cues, and personalization of the robot affect learning outcomes and motivation in RALL. Lee and Lee (2022) have conducted a meta-analysis of 16 RALL studies and found a medium effect size (d = 0.59, SE = 0.09) of RALL over non-RALL conditions. They investigated the effects of several moderator variables (age group, target language, language domain, robots’ role, interaction type, and type of non-RALL condition). Although some differences in learning outcomes appeared, they were not statistically significant. How exactly languages have been employed and whether this has been done strategically to support students’ learning, is still an open question. The outcomes of the current review will help in making informed choices when designing robots as tools for (language) education in a translanguaging pedagogy.
Methods
I conducted a literature search on Google Scholar, EBSCOhost and PubMed using the search terms “robot assisted language learning”, “robot language education”, “social robots translanguaging”, “social robots home language” and “social robot migrant education”. For Google Scholar, a maximum of 150 articles was screened for each search term (cf. Shultz, 2007; Falagas et al., 2008). The main aim of this search was to find studies that used educational robots and included multilingual students’ L1 (both in language education and education in general), or were aimed at teaching an L2. The focus lied on the robot activities rather than on the experimental outcomes of the studies, and, as a result, the exclusion criteria were not very strict in terms of research design. Other reviews (e.g., van den Berghe et al., 2019; Lee and Lee, 2022) had stricter exclusion criteria as they focused on the outcomes of RALL, which is why the current review contains more studies than earlier reviews. Figure 1 shows the complete selection process, including exclusion criteria.1 For example, any RALL studies in which monolingual children were taught new words in their L1 (e.g., Tolksdorf et al., 2021) were excluded, because the goal was to study how languages were used in a multilingual setting. Each study was coded on their use of languages on a scale of ‘completely L1, only target vocabulary in L2’ to ‘full L2 program’.
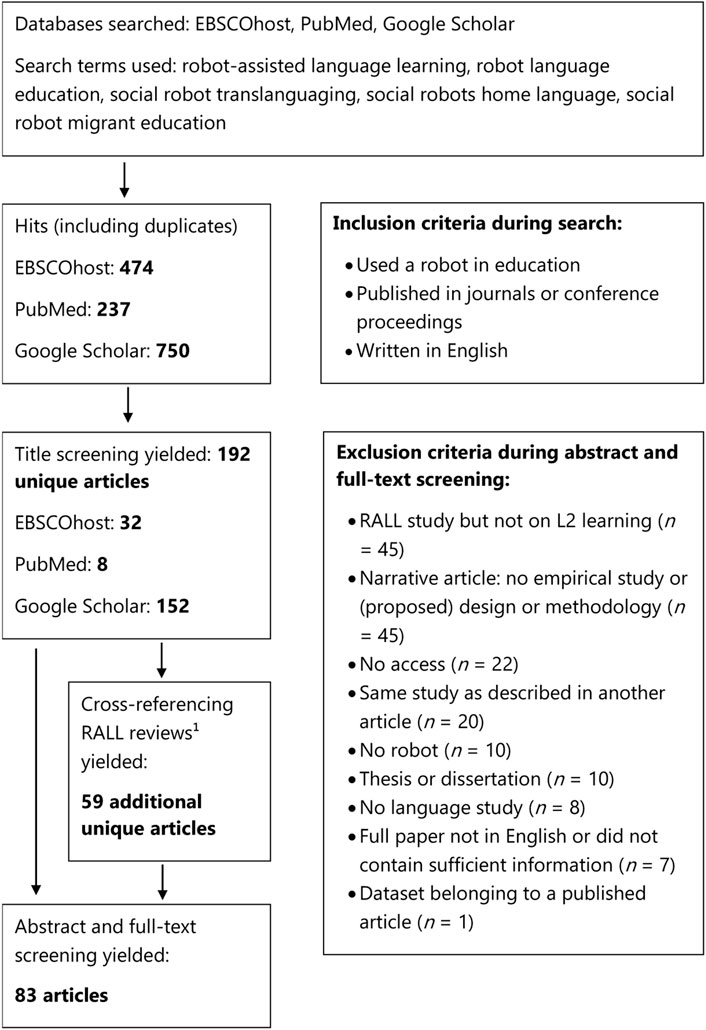
FIGURE 1. Article selection process.
Results
Table 1 summarizes the 83 articles and their usage of L1 and L2. Many studies (n = 24, the upper two rows of Table 1) mainly used the L1 during the student-robot interactions, with only the target words (and perhaps some support words or sentences) in the L2. This approach was used particularly often for novice learners, such as young children who do not have prior knowledge of the L2. The use of the L1 in these studies is therefore not prompted by a desire for translanguaging, but from a practical perspective, as students do not have enough prior knowledge to engage in interactions with more L2. The participant groups of these studies were homogenous in their languages; their L1 is the same as the school language, and the L2 is a foreign language. So, even though there is usage of L1 in these 24 studies, they are not examples of translanguaging in the sense that languages spoken outside of the school were used.
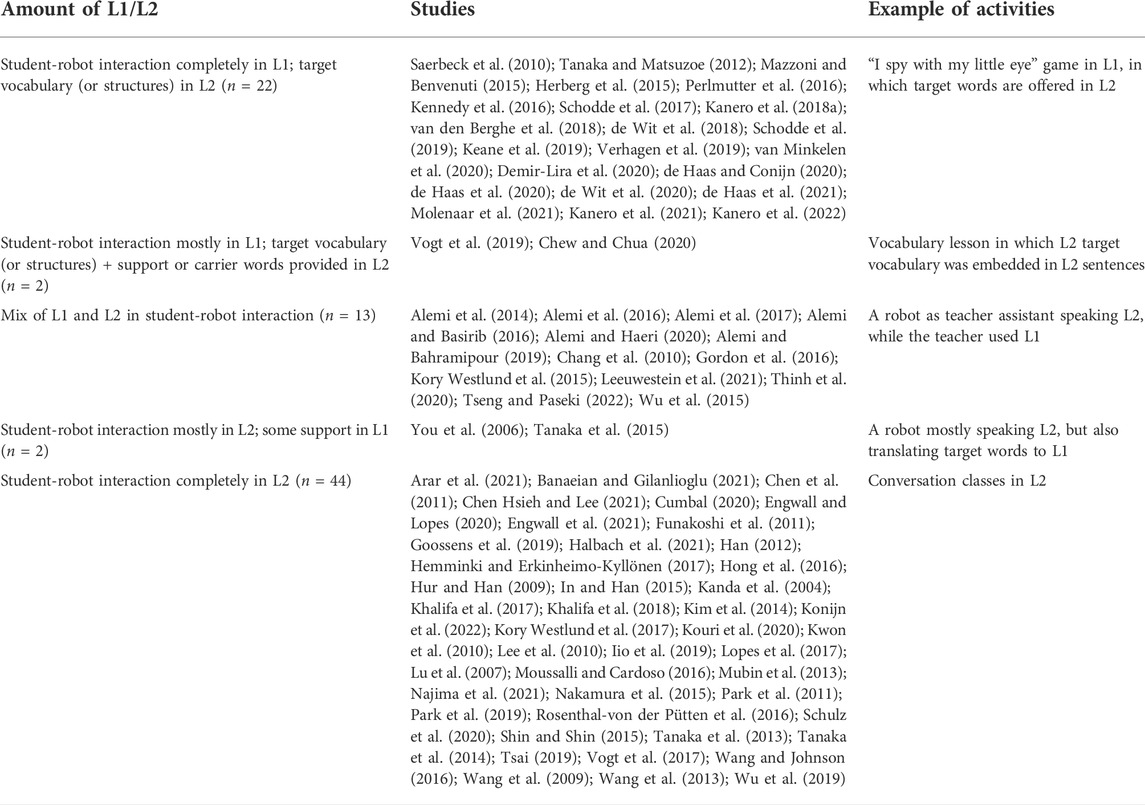
TABLE 1. Overview of usage of L1 and L2 in RALL studies.
Even more studies (n = 46, the lower two rows of Table 1) used (almost) exclusively the L2 in the student-robot interaction: an immersion approach. Most studies used the robot to engage in conversations with students in the L2 or to read stories in the L2 to students. The rationale for using such an immersion approach is that the robot provides L2 input of high quality to students who may not have access to native speakers, or that speaking to a robot is less anxiety-inducing than speaking to classmates or other people. This latter has been confirmed in RALL research (Wang et al., 2013; Alemi et al., 2015; Alemi et al., 2017).
Surprisingly few articles (n = 13) have adopted an approach in which the L1 and L2 were mixed. Some studies used a ‘one person/character, one language’ approach, in which the robot used one language, and the teacher used the other language (Chang et al., 2010; Alemi et al., 2014; Alemi and Basirib, 2016; Alemi et al., 2016; Alemi et al., 2017; Alemi and Bahramipour, 2019; Alemi and Haeri, 2020). A similar approach is used by Gordon et al. (2016) and Kory Westlund et al. (2015), although the robot mainly used the L1 and a virtual character on a screen spoke both the L1 and L2. In only a few studies, the actual robot was multilingual and used the L1 to support learning of the L2 (Thinh et al., 2020; Leeuwestein et al., 2021; Tseng and Paseki, 2022). Thus, the advantage of the robot being able to easily switch between languages, has not been used very often so far.
Sixteen of the 83 studies (partly) targeted a migrant population (Kim et al., 2014; Gordon et al., 2016; Rosenthal-von der Pütten et al., 2016; Kory Westlund et al., 2017; Lopes et al., 2017; Hemminki and Erkinheimo-Kyllönen, 2017; Goossens et al., 2019; Park et al., 2019; Engwall and Lopes, 2020; Kouri et al., 2020; Schulz et al., 2020; Engwall et al., 2021; Halbach et al., 2021; Leeuwestein et al., 2021; Cumbal, 2022; Konijn et al., 2022). A striking result is that only one of these studies used students’ L1 to support learning of the L2 (Leeuwestein et al., 2021). All other studies did not include students’ L1. Also, no studies on educational robots using students’ L1 in other subjects than language learning were found.
Discussion
The aim of this mini review was to find out how languages are employed in RALL to support learning, and to identify opportunities to use robots within a translanguaging pedagogy. A total of 83 articles on RALL were analyzed on their usage of L1 and L2. Most studies focused on using either the L1 or the L2 as the main language of communication, with occasional use of the other language. Few studies so far used a mix of L1 and L2 in student-robot interaction, and only one study used the L1 of students with a migrant background. L1s have rarely been used to support students’ (language) learning, and effective translanguaging exercises (such as discussing assignments within class in the L1 or pre-teaching in the L1) have not been observed so far.
Perhaps this is due to the notion of translanguaging appearing somewhat counterintuitive upon first sight: more use of the L1 encourages learning of the L2. Although benefits of multilingualism have been established in psycholinguistic research for quite some time, it has proven difficult to incorporate such approaches in education. The lack of translanguaging strategies could also be due to practical concerns. The high heterogeneity of migrant populations makes it challenging to adapt to each student’s L1. It is easier, of course, to design student-robot interactions in one language for all participants. However, I would like to invite all researchers to embrace the challenge of designing multilingual interactions for students of different backgrounds. It is especially useful for multilingual students to use their L1s in education, and robots can then be used in a way that they are truly an addition to current classroom practices, as they can do something that most teachers cannot, namely, speaking all multilingual children’s home languages.
This review shows that there are ample opportunities for new research in the field or RA(L)L. It could be advantageous for many students–both monolingual and bilingual–if more researchers set out to investigate the use of robots in a translanguaging pedagogy. Many teachers do not speak children’s L1s, and robots can therefore fulfill a unique role for migrant children within school environments. Perhaps they can pre-teach children in the L1, provide translations in the L1 for difficult vocabulary, or be the conversation partner with which assignments can be discussed in the L1. Such activities need not be limited to language learning; translanguaging is a valuable approach in learning any aspect of the curriculum. For example, such approaches can also be used in mathematics education, for which children may have obtained previous knowledge in the L1 rather than the L2 (such as count words or concepts such as ‘more’ or ‘adding’). The recent example of a robot acting as a facilitator for positive interactions between children of different language backgrounds (Kim et al., 2021) could be extended to educational situations in which all children’s L1s are positively valued and actively used in learning of any subject.
A limitation of this review is that for some articles, the use of languages was not described in detail. Many researchers described to use only the L2 in student-robot interactions, but did not describe language use amongst students or with the teacher. Perhaps teachers or classmates provided support in the L1. Moreover, a rationale behind the use of languages was often not presented, making it unclear whether the choice to (almost) exclusively use the L1 or the L2 is a strategic choice from a language-learning perspective, or a practical choice from a design perspective. The balance between L1 and L2 in a language-learning activity affects the outcomes of a RALL study and should be carefully considered when designing an experiment.
In conclusion, the main outcome of this review is that multilingual students’ L1s have rarely been used to strategically support learning of the L2: interactions rely heavy on either the L1 or the L2, depending on the context and on students’ previous knowledge. Little use of L1s has been observed especially for students with a migrant background. There are clear opportunities for further research in RA(L)L: robots can be used to facilitate the use of students’ L1s both for language learning and learning in general. This review aimed to provide inspiration for a new line of research in RA(L)L, in which robots can support the active use and positive valuation of any language that students speak.
Author contributions
RB conceived the study, did the literature search, analyzed the data, and wrote the manuscript.
Funding
This research has been carried out within HBO-postdoc project “de Voorleesrobot” funded by Regieorgaan SIA, project number HBOPD.2018.05.029.
Conflict of interest
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1RALL reviews that were cross-referenced for additional articles were Kanero et al. (2018b), Randall (2019), van den Berghe et al. (2019), Neumann (2020), Lee and Lee (2022), and Lin et al. (2022).
References
Alemi, M., and Bahramipour, S. (2019). An innovative approach of incorporating a humanoid robot into teaching EFL learners with intellectual disabilities. Asian. J. Second Foreign Lang. Educ. 4 (1), 10–22. doi:10.1186/s40862-019-0075-5
Alemi, M., and Basirib, N. M. (2016). Exploring social robots as a tool for special education to teach English to Iranian kids with autism. Int. J. Rob. App 4 (4), 32–43.
Alemi, M., and Haeri, N. (2020). Robot-assisted instruction of L2 pragmatics: Effects on young EFL learners’ speech act performance. Lang. Learn. Technol. 24 (2), 86–103.
Alemi, M., Meghdari, A., and Ghazisaedy, M. (2014). Employing humanoid robots for teaching English language in Iranian junior high-schools. Int. J. Hum. Robot. 11 (03), 1450022–1450025. doi:10.1142/s0219843614500224
Alemi, M., Meghdari, A., and Ghazisaedy, M. (2015). The impact of social robotics on L2 learners’ anxiety and attitude in English vocabulary acquisition. Int. J. Soc. Robot. 7 (4), 523–535. doi:10.1007/s12369-015-0286-y
Alemi, M., Meghdari, A., Ghazisaedy, M., Zandvakili, M., and Karimian, A. (2016). Impact of social robots as assistants for English language teaching in Iranian schools. Mech. Eng. Sharif 32 (3), 57–64.
Alemi, M., Meghdari, A., and Haeri, N. S. (2017). “Young EFL learners’ attitude towards RALL: An observational study focusing on motivation, anxiety, and interaction,” in Proc. Int. Conf. Soc. Robot (Tsukuba: Springer), 252–261.
Arar, C., Belazoui, A., and Telli, A. (2021). Adoption of social robots as pedagogical aids for efficient learning of second language vocabulary to children. J. E-Learn. Knowl. Soc. 17 (3), 119–126. doi:10.20368/1971-8829/1135551
Banaeian, H., and Gilanlioglu, I. (2021). Influence of the NAO robot as a teaching assistant on University students’ vocabulary learning and attitudes. Australas. J. Educ. Technol. 37 (3), 71–87. doi:10.14742/ajet.6130
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., and Tanaka, F. (2018). Social robots for education: A review. Sci. Robot. 3 (21), eaat5954. doi:10.1126/scirobotics.aat5954
Bosma, E., Bakker, A., Zenger, L., and Blom, E. (2022). Supporting the development of the bilingual lexicon through translanguaging: A realist review integrating psycholinguistics with educational sciences. Eur. J. Psychol. Educ., 1–23. doi:10.1007/s10212-021-00586-6
Chang, C. W., Lee, J. H., Chao, P. Y., Wang, C. Y., and Chen, G. D. (2010). Exploring the possibility of using humanoid robots as instructional tools for teaching a second language in primary school. J. Educ. Techno. Soc. 13 (2), 13–24.
Chen Hsieh, J., and Lee, J. S. (2021). Digital storytelling outcomes, emotions, grit, and perceptions among EFL middle school learners: Robot-assisted versus PowerPoint-assisted presentations. Comput. Assist. Lang. Learn., 1–28. doi:10.1080/09588221.2021.1969410
Chen, N. S., Quadir, B., and Teng, D. C. (2011). Integrating book, digital content and robot for enhancing elementary school students' learning of English. Australas. J. Educ. Technol. 27 (3), 546–561. doi:10.14742/ajet.960
Chew, E., and Chua, X. N. (2020). Robotic Chinese language tutor: Personalising progress assessment and feedback or taking over your job? Horizon 28 (3), 113–124. doi:10.1108/oth-04-2020-0015
Creese, A., and Blackledge, A. (2010). Translanguaging in the bilingual classroom: A pedagogy for learning and teaching? Mod. Lang. J. 94 (1), 103–115. doi:10.1111/j.1540-4781.2009.00986.x
Cumbal, R. (2022). “Adaptive robot discourse for language acquisition in adulthood,” in Proc. 2022 ACM/IEEE Int. Conf. Hum., 1158–1160. doi:10.1109/HRI53351.2022.9889517
Cummins, J. (2008). “BICS and CALP: Empirical and theoretical status of the distinction,” in Encyclopedia of language and education. Editors B. Street, and N. H. Hornberger (New York: Springer Science), 71–83.
Cummins, J. (2019). The emergence of translanguaging pedagogy: A dialogue between theory and practice. Int. Multiling. Res. J. 9 (13), 19–36.
Daniela, L., and Lytras, M. D. (2019). Educational robotics for inclusive education. Tech. Know. Learn. 24 (2), 219–225. doi:10.1007/s10758-018-9397-5
de Haas, M., and Conijn, R. (2020). “Carrot or stick: The effect of reward and punishment in robot assisted language learning,” in Proc. 2020 ACM/IEEE Int. Conf. Hum. Robot Interact. (Cambridge: ACM/IEEE), 177–179.
de Haas, M., Vogt, P., and Krahmer, E. (2020). The effects of feedback on children's engagement and learning outcomes in robot-assisted second language learning. Front. Robot. AI 7, 101. doi:10.3389/frobt.2020.00101
de Haas, M., Vogt, P., and Krahmer, E. (2021). When preschoolers interact with an educational robot, does robot feedback influence engagement? Multimodal Technol. Interact. 5 (12), 77. doi:10.3390/mti5120077
de Houwer, A. (1990). The acquisition of two languages from birth: A case study. Cambridge: Cambridge University.
de Wit, J., Brandse, A., Krahmer, E., and Vogt, P. (2020). “Varied human-like gestures for social robots: Investigating the effects on children’s engagement and language learning,” in Proc. 2020 ACM/IEEE Int. Conf. Hum. Robot Interact. (Cambridge: ACM/IEEE), 359–367.
de Wit, J., Schodde, T., Willemsen, B., Bergmann, K., de Haas, M., Kopp, S., et al. (2018). “The effect of a robot’s gestures and adaptive tutoring on children’s acquisition of second language vocabularies,” in Proc. 2018 ACM/IEEE Int. Conf. Hum. Robot Interact. (Chicago: ACM/IEEE), 50–58.
de Wit, J., Vogt, P., and Krahmer, E. (2022). The design and observed effects of robot-performed manual gestures: A systematic review. ACM Trans. Hum.-Robot Interact. doi:10.1145/3549530
Demir-Lira, Ö. E., Kanero, J., Oranç, C., Koşkulu, S., Franko, I., Göksun, T., et al. (2020). L2 vocabulary teaching by social robots: The role of gestures and on-screen cues as scaffolds. Front. Educ. 5, 599636. doi:10.3389/feduc.2020.599636
Engwall, O., Lopes, J., and Åhlund, A. (2021). Robot interaction styles for conversation practice in second language learning. Int. J. Soc. Robot. 13 (2), 251–276. doi:10.1007/s12369-020-00635-y
Engwall, O., and Lopes, J. (2020). Interaction and collaboration in robot-assisted language learning for adults. Comput. Assist. Lang. Learn. 35, 1–37. doi:10.1080/09588221.2020.1799821
Falagas, M. E., Pitsouni, E. I., Malietzis, G. A., and Pappas, G. (2008). Comparison of PubMed, scopus, web of science, and Google scholar: Strengths and weaknesses. FASEB J. 22, 338–342. doi:10.1096/fj.07-9492lsf
Funakoshi, K., Mizumoto, T., Nagata, R., and Nakano, M. (2011). “The chanty bear: A new application for HRI research,” in Proc. 2011 ACM/IEEE Int. Conf. Hum. Robot Interact. (Lausanne: ACM/IEEE), 141–142.
García, O. (2009). Bilingual education in the 21st century. A global perspective. Chichester: Wiley.
García, O., and Li, L. (2015). “Translanguaging, bilingualism, and bilingual education,” in The handbook of bilingual and multilingual education. Editors W. E. Wright, S. Boun, and O. García (Hoboken: Wiley), 223–240.
García, O., and Lin, A. M. (2017). “Translanguaging in bilingual education,” in Bilingual and multilingual education. Editors O. García, A. M. Lin, and S. May (Cham: Springer), 117–130.
Goossens, N., Aarts, R., and Vogt, P. (2019). “Storytelling with a social robot,” in Proc. Worksh. Robot. Learning (Daegu).
Gordon, G., Spaulding, S., Westlund, J. K., Lee, J. J., Plummer, L., Martinez, M., et al. (2016). “Affective personalization of a social robot tutor for children’s second language skills,” in Proc. AAAI Conf. Art. Intel. (AAAI Phoenix), 3951–3957.
Günther-van der Meij, M., Duarte, J., and Nap, L. (2020). Including multiple languages in secondary education: A translanguaging approach. Eur. J. Appl. Linguistics 8 (1), 73–106. doi:10.1515/eujal-2019-0027
Halbach, T., Schulz, T., Leister, W., and Solheim, I. (2021). Robot-enhanced language learning for children in Norwegian day-care centers. Multimodal Technol. Interact. 5 (12), 74. doi:10.3390/mti5120074
Hemminki, J., and Erkinheimo-Kyllönen, A. (2017). “A humanoid robot as a language tutor,” in Proc. Worksh. R4L@ HRI2017 (Vienna).
Herberg, J. S., Feller, S., Yengin, I., and Saerbeck, M. (2015). “Robot watchfulness hinders learning performance,” in Proc. RO-MAN 2015-IEEE Int. Symp. Robot Hum. Interact. Commun. (Kobe IEEE), 153–160.
Hong, Z. W., Huang, Y. M., Hsu, M., and Shen, W. W. (2016). Authoring robot-assisted instructional materials for improving learning performance and motivation in EFL classrooms. J. Educ. Techno. Soc. 19 (1), 337–349.
Hornberger, N. H. (2005). Opening and filling up implementational and ideological spaces in Heritage language education. Mod. Lang. J. 89 (4), 605–609.
Hur, Y., and Han, J. (2009). Analysis on children's tolerance to weak recognition of storytelling robots. J. Converg. Inf. Technol. 4 (3), 103–109. doi:10.4156/jcit.vol4.issue3.15
Iio, T., Maeda, R., Ogawa, K., Yoshikawa, Y., Ishiguro, H., Suzuki, K., et al. (2019). Improvement of Japanese adults' English speaking skills via experiences speaking to a robot. J. Comput. Assist. Learn. 35 (2), 228–245. doi:10.1111/jcal.12325
In, J., and Han, J. (2015). “The acoustic-phonetics change of English learners in robot assisted learning,” in Proc. 2015 ACM/IEEE Int. Conf. Hum. Robot Interact. (ACM/IEEE Portland), 39–40.
Kanda, T., Hirano, T., Eaton, D., and Ishiguro, H. (2004). Interactive robots as social partners and peer tutors for children: A field trial. Hum. Comput. Interact. 19 (1-2), 61–84. doi:10.1207/s15327051hci1901&2_4
Kanero, J., Franko, I., Oranç, C., Uluşahin, O., Koşkulu, S., Adıgüzel, Z., et al. (2018a). “Who can benefit from robots? Effects of individual differences in robot-assisted language learning,” in 2018 Jt. IEEE Int. Conf. Dev. Learn. Epigenetic Robot. ICDL-EpiRob (Tokyo IEEE), 212–217.
Kanero, J., Geçkin, V., Oranç, C., Mamus, E., Küntay, A. C., and Göksun, T. (2018b). Social robots for early language learning: Current evidence and future directions. Child. Dev. Perspect. 12 (3), 146–151. doi:10.1111/cdep.12277
Kanero, J., Oranç, C., Koşkulu, S., Kumkale, G. T., Göksun, T., and Küntay, A. C. (2022). Are tutor robots for everyone? The influence of attitudes, anxiety, and personality on robot-led language learning. Int. J. Soc. Robot. 14 (2), 297–312. doi:10.1007/s12369-021-00789-3
Kanero, J., Tunalı, E. T., Oranç, C., Göksun, T., and Küntay, A. C. (2021). When even a robot tutor zooms: A study of embodiment, attitudes, and impressions. Front. Robot. AI 8, 679893. doi:10.3389/frobt.2021.679893
Keane, T., Chalmers, C., Boden, M., and Williams, M. (2019). Humanoid robots: Learning a programming language to learn a traditional language. Technol. Pedagogy Educ. 28 (5), 533–546. doi:10.1080/1475939x.2019.1670248
Kennedy, J., Baxter, P., Senft, E., and Belpaeme, T. (2016). “Social robot tutoring for child second language learning,” in Proc. 2016 ACM/IEEE Int. Conf. Hum. Robot Interact. (Christchurch ACM/IEEE), 231–238.
Khalifa, A., Kato, T., and Yamamoto, S. (2017). “Measuring effect of repetitive queries and implicit learning with joining-in-type robot assisted language learning system,” in Proc. SLaTE- ISCA Worksh. Speech Lang. Technol. Educ. (Stockholm), 13–17.
Khalifa, A., Kato, T., and Yamamoto, S. (2018). “The retention effect of learning grammatical patterns implicitly using joining-in-type robot-assisted language-learning system,” in Proc. Int. Conf. Text Speech Dial. (Brno: Springer), 492–499.
Kim, Y., Marx, S., Pham, H. V., and Nguyen, T. (2021). Designing for robot-mediated interaction among culturally and linguistically diverse children. Educ. Technol. Res. Dev. 69 (6), 3233–3254. doi:10.1007/s11423-021-10051-2
Kim, Y., Smith, D., Kim, N., and Chen, T. (2014). Playing with a robot to learn English vocabulary. KAERA Res. Forum 1 (2), 3–8.
Konijn, E. A., Jansen, B., Mondaca Bustos, V., Hobbelink, V. L., and Preciado Vanegas, D. (2022). Social robots for (second) language learning in (migrant) primary school children. Int. J. Soc. Robot. 14 (3), 827–843. doi:10.1007/s12369-021-00824-3
Kory Westlund, J., Gordon, G., Spaulding, S., Lee, J. J., Plummer, L., Martinez, M., et al. (2015). “Learning a second language with a socially assistive robot,” in Proc. New Friends 2015 - 1st Int. Conf. Soc. Robot. Therapy Educ. (Almere), 30–31.
Kory Westlund, J. M., Jeong, S., Park, H. W., Ronfard, S., Adhikari, A., Harris, P. L., et al. (2017). Flat vs. expressive storytelling: Young children’s learning and retention of a social robot’s narrative. Front. Hum. Neurosci. 11, 295. doi:10.3389/fnhum.2017.00295
Kouri, S., Köpman, E., Ahtinen, A., and Ramirez Millan, V. (2020). “Customized robot-assisted language learning to support immigrants at work: Findings and insights from a qualitative user experience study,” in Proc. HAI 2020-8th Int. Conf. Hum.-Agent Interact. (Sydney ACM), 212–220.
Kwon, O. H., Koo, S. Y., Kim, Y. G., and Kwon, D. S. (2010). “Telepresence robot system for English tutoring,” in Proc. IEEE Workshop Adv. Robot. Soc. Impacts ARSO (Seoul IEEE), 152–155.
Lee, H., and Lee, J. H. (2022). The effects of robot-assisted language learning: A meta-analysis. Educ. Res. Rev. 35, 100425. doi:10.1016/j.edurev.2021.100425
Lee, S., Noh, H., Lee, J., Lee, K., and Lee, G. G. (2010). Cognitive effects of robot-assisted language learning on oral skills. ReCALL 23 (01), 25–58.
Leeuwestein, H., Barking, M., Sodacı, H., Oudgenoeg‐Paz, O., Verhagen, J., Vogt, P., et al. (2021). Teaching Turkish-Dutch kindergartners Dutch vocabulary with a social robot: Does the robot's use of Turkish translations benefit children's Dutch vocabulary learning? J. Comput. Assist. Learn. 37 (3), 603–620. doi:10.1111/jcal.12510
Lin, V., Yeh, H. C., and Chen, N. S. (2022). A systematic review on oral interactions in robot-assisted language learning. Electronics 11 (2), 290. doi:10.3390/electronics11020290
Lopes, J., Engwall, O., and Skantze, G. (2017). “A first visit to the robot language café,” in Proc. SLaTE- ISCA Worksh. Speech Lang. Technol. Educ. (Stockholm).
Lu, Y. T., Chang, C. W., and Chen, G. D. (2007). “Using a programmable storytelling robot to motivate learning second language,” in Proc. IEEE Int. Conf. Adv. Learn. Technol. (IEEE Nigata), 841–844.
Mazzoni, E., and Benvenuti, M. (2015). A robot-partner for preschool children learning English using socio-cognitive conflict. J. Educ. Techno. Soc. 18 (4), 474–485.
J. M. Meisel (Editor) (2010). Two first languages: Early grammatical development in bilingual children (Dordrecht: Walter de Gruyter).
Molenaar, B., Soliño Fernández, B., Polimeno, A., Barakova, E., and Chen, A. (2021). Pitch it right: Using prosodic entrainment to improve robot-assisted foreign language learning in school-aged children. Multimodal Technol. Interact. 5 (12), 76. doi:10.3390/mti5120076
Moussalli, S., and Cardoso, W. (2016). “Are commercial ‘personal robots’ ready for language learning? Focus on second language speech,” in Proc. EUROCALL 2016-Eur. Conf. Comput. Assist. Lang. Learn. (Limassol), 325–329.
Mubin, O., Shahid, S., and Bartneck, C. (2013). Robot assisted language learning through games: A comparison of two case studies. Aust. J. Intell. Inf. Proc. Syst. 13 (3), 9–14.
Najima, T., Kato, T., Tamura, A., and Yamamoto, S. (2021). “Remote learning of speaking in syntactic forms with robot-avatar-assisted language learning system,” in Proc. Int. Conf. Text Speech Dial. (Olomouc: Springer), 558–566.
Nakamura, S., Watanabe, M., Yoshikawa, Y., Ogawa, K., and Ishiguro, H. (2015). “Relieving mental stress of speakers using a tele-operated robot in foreign language speech education,” in Proc. Interspeech 2015-16th Ann. Conf. Int. Speech Comm. Assoc. (ISCA Dresden), 1835–1838.
Neumann, M. M. (2020). Social robots and young children’s early language and literacy learning. Early Child. Educ. J. 48 (2), 157–170. doi:10.1007/s10643-019-00997-7
Özcan, B., Kok, N., Wallenburg, J., and Sijbrands, E. J. (2014). Diabetologist 2.0; patients perform diabetic tests using a multilingual robot. Ned. Tijdschr. Geneeskd. 158, A8451.
Park, H. W., Grover, I., Spaulding, S., Gomez, L., and Breazeal, C. (2019). A model-free affective reinforcement learning approach to personalization of an autonomous social robot companion for early literacy education. Proc. AAAI Conf. Art. Intell. 33, 687–694. doi:10.1609/aaai.v33i01.3301687
Park, S. J., Han, J. H., Kang, B. H., and Shin, K. C. (2011). “Teaching assistant robot, ROBOSEM, in English class and practical issues for its diffusion,” in Proc. IEEE Workshop Adv. Robot. Soc. Impacts ARSO (Menlo Park IEEE), 8–11.
Perlmutter, L., Fiannaca, A., Kernfeld, E., Anand, S., Arnold, L., and Cakmak, M. (2016). “Automatic adaptation of online language lessons for robot tutoring,” in Proc. Int. Conf. Soc. Robot. (Kansas City: Springer), 660–670.
Petitto, L. A., Katerelos, M., Levy, B. G., Gauna, K., Tétreault, K., and Ferraro, V. (2001). Bilingual signed and spoken language acquisition from birth: Implications for the mechanisms underlying early bilingual language acquisition. J. Child. Lang. 28 (2), 453–496. doi:10.1017/s0305000901004718
Randall, N. (2019). A survey of robot-assisted language learning (RALL). ACM Trans. Hum. Robot. Interact. 9 (1), 1–36. doi:10.1145/3345506
Rohlfing, K. J. (2019). “Learning language from the use of gestures,” in International handbook of language acquisition. Editors J. S. Horst, and J. von Koss Torkildsen (London: Routledge/Taylor and Francis Group), 213–233.
Rosenthal-von der Pütten, A. M., Straßmann, C., and Krämer, N. C. (2016). “Robots or agents–neither helps you more or less during second language acquisition,” in 2016-Proc. ACM Int. Conf. Intell. Virtual Agents (Los Angeles: Springer), 256–268.
Rowe, M. L., Silverman, R. D., and Mullan, B. E. (2013). The role of pictures and gestures as nonverbal aids in preschoolers’ word learning in a novel language. Contemp. Educ. Psychol. 38 (2), 109–117. doi:10.1016/j.cedpsych.2012.12.001
Saerbeck, M., Schut, T., Bartneck, C., and Janse, M. D. (2010). “Expressive robots in education: Varying the degree of social supportive behavior of a robotic tutor,” in Proc. SIGCHI Conf. Hum. Factors Comput. Syst.-Proc. (Atlanta: ACM SIGCHI), 1613–1622.
Schodde, T., Bergmann, K., and Kopp, S. (2017). “Adaptive robot language tutoring based on Bayesian knowledge tracing and predictive decision-making,” in Proc. 2017 ACM/IEEE Int. Conf. Hum. Robot Interact. (Vienna: ACM/IEEE), 128–136.
Schodde, T., Hoffmann, L., Stange, S., and Kopp, S. (2019). Adapt, explain, engage—A study on how social robots can scaffold second-language learning of children. ACM Trans. Hum. Robot. Interact. 9 (1), 1–27. doi:10.1145/3366422
Schulz, T., Halbach, T., and Solheim, I. (2020). “Using social robots to teach language skills to immigrant children in an Oslo city district,” in Proc. 2022 ACM/IEEE Int. Conf. Hum. Robot Interact. (Cambridge: ACM/IEEE), 442–444.
Shin, J. E., and Shin, D. H. (2015). “Robot as a facilitator in language conversation class,” in Proc. 2015 ACM/IEEE Int. Conf. Hum. Robot Interact. (Portland: ACM/IEEE), 11–12.
Shultz, M. (2007). Comparing test searches in PubMed and Google scholar. J. Med. Libr. Assoc. 95, 442–445. doi:10.3163/1536-5050.95.4.442
Sierens, S., and van Avermaet, P. (2014). “Language diversity in education: Evolving from multilingual education to functional multilingual learning,” in Managing diversity in education: Languages, policies, pedagogies. Editors D. Little, C. Leung, and P. van Avermaet (Bristol: Multilingual Matters), 204–222.
Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R., and Hayashi, K. (2015). Pepper learns together with children: Development of an educational application. Humanoids 15, 270–275.
Tanaka, F., and Matsuzoe, S. (2012). Children teach a care-receiving robot to promote their learning: Field experiments in a classroom for vocabulary learning. J. Hum. Robot. Interact. 1 (1), 78–95. doi:10.5898/jhri.1.1.tanaka
Tanaka, F., Takahashi, T., Matsuzoe, S., Tazawa, N., and Morita, M. (2013). “Child-operated telepresence robot: A field trial connecting classrooms between Australia and Japan,” in Proc. IEEE Int. Conf. Intell. Robots Syst., 5896–5901.
Tanaka, F., Takahashi, T., Matsuzoe, S., Tazawa, N., and Morita, M. (2014). “Telepresence robot helps children in communicating with teachers who speak a different language,” in Proc. 2014 ACM/IEEE Int. Conf. Hum. Robot Interact. (ACM/IEEE Bielefeld), 399–406.
Taylor, J. L., Wujal Wujal Aboriginal Shire Council, , Soro, A., Esteban, M., Vallino, A., Roe, P., et al. (2020). “Crocodile language friend: Tangibles to foster children's language use,” in Proc. Conf. Hum. Factors Comput. Syst.-Proc. (ACM Honolulu), 1–14.
Thinh, N. T., Hai, N. D. X., and Tho, T. P. (2020). The influential role of robot in second language classes based on artificial intelligence. Int. J. Mech. Eng. Robot. Res. 9 (9), 1306–1311. doi:10.18178/ijmerr.9.9.1306-1311
Ticheloven, A., Schwenke-Lam, T., and Fürstenau, S. (2020). “Multilingual teaching practices in primary classrooms in Germany: Language comparisons,” in Multilingual approaches for teaching and learning. Editors C. Kirsch, and J. Duarte (London: Routledge), 34–51.
Tolksdorf, N. F., Viertel, F. E., and Rohlfing, K. J. (2021). Do shy preschoolers interact differently when learning language with a social robot? An analysis of interactional behavior and word learning. Front. Robot. AI 8, 676123. doi:10.3389/frobt.2021.676123
Tsai, C. C. (2019). Adapting an anthropomorphized robot for enhancing EFL learning motivation and performance at an elementary school in Taiwan. tner. 58 (4), 22–35. doi:10.15804/tner.19.58.4.02
Tseng, C. C., and Paseki, M. (2022). “Innovation in using humanoid robot for immigrants' well-being,” in Proc. Int. Conf. Liter. Innov. Chines. Lang.
van den Berghe, R., van der Ven, S., Verhagen, J., Oudgenoeg-Paz, O., Papadopoulos, F., and Leseman, P. (2018). “Investigating the effects of a robot peer on L2 word learning,” in Proc. 2018 ACM/IEEE Int. Conf. Hum. Robot Interact. (Chicago: ACM/IEEE), 267–268.
van den Berghe, R., Verhagen, J., Oudgenoeg-Paz, O., van der Ven, S., and Leseman, P. (2019). Social robots for language learning: A review. Rev. Educ. Res. 89 (2), 259–295. doi:10.3102/0034654318821286
van Minkelen, P., Gruson, C., Van Hees, P., Willems, M., De Wit, J., Aarts, R., et al. (2020). “Using self-determination theory in social robots to increase motivation in L2 word learning,” in Proc. 2020 ACM/IEEE Int. Conf. Hum. Robot Interact. (Cambridge: ACM/IEEE), 369–377.
Verhagen, J., Berghe, R. V. D., Oudgenoeg-Paz, O., Küntay, A., and Leseman, P. (2019). Children’s reliance on the non-verbal cues of a robot versus a human. PloS one 14 (12), e0217833. doi:10.1371/journal.pone.0217833
Vogt, P., Dunk, S., and Poos, P. (2017). “Foreign language tutoring for young adults with severe learning problems,” in Proc. 2017 ACM/IEEE Int. Conf. Hum. Robot Interact. (Vienna: ACM/IEEE), 317–318.
Vogt, P., van den Berghe, R., de Haas, M., Hoffman, L., Kanero, J., Mamus, E., et al. (2019). “second language tutoring using social robots: A large-scale study,” in Proc. 2019 ACM/IEEE Int. Conf. Hum. Robot Interact. (Daegu: ACM/IEEE), 497–505.
Wang, N., and Johnson, W. L. (2016). “Pilot study with RALL-E: Robot-assisted language learning in education,” in Proc. Intel. Tutor. Syst. (Zagreb: Springer).
Wang, Y. H., Young, S. S. C., and Jang, J. S. R. (2013). Using tangible companions for enhancing learning English conversation. J. Educ. Techno. Soc. 16 (2), 296–309.
Wang, Y. H., Young, S. S., and Jang, J. S. R. (2009). “Evaluation of tangible learning companion/robot for English language learning,” in Proc IEEE Int. Conf. Adv. Learn. Technol., 322–326.
Wu, Q., Wang, S., Cao, J., He, B., Yu, C., and Zheng, J. (2019). Object recognition-based second language learning educational robot system for Chinese preschool children. IEEE Access 7, 7301–7312. doi:10.1109/access.2018.2890438
Wu, W. C. V., Wang, R. J., and Chen, N. S. (2015). Instructional design using an in-house built teaching assistant robot to enhance elementary school English-as-a-foreign-language learning. Interact. Learn. Environ. 23 (6), 696–714. doi:10.1080/10494820.2013.792844
Keywords: social robots, human-robot interaction, language learning, translanguaging, educational robots
Citation: van den Berghe R (2022) Social robots in a translanguaging pedagogy: A review to identify opportunities for robot-assisted (language) learning. Front. Robot. AI 9:958624. doi: 10.3389/frobt.2022.958624
Received: 31 May 2022; Accepted: 18 August 2022;
Published: 14 October 2022.
Edited by:
Olov Engwall, KTH Royal Institute of Technology, SwedenReviewed by:
Hansol Lee, Korea Military Academy, South KoreaMinoo Alemi, Islamic Azad University, West Tehran, Iran
Copyright © 2022 van den Berghe. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Rianne van den Berghe, bWFqLnZhbmRlbi5iZXJnaGVAd2luZGVzaGVpbS5ubA==