 Rémi Chalard
Rémi Chalard  Afshin Fazel
Afshin Fazel Marie-Aude Vitrani
Marie-Aude Vitrani- 1AMPERE Laboratory, CNRS UMR 5005, INSA de Lyon, Lyon, France
- 2Departement de Gynécologie Obstétrique, Hopital Lariboisière, Université Paris Diderot et de l’APHP, Paris, France
- 3Institut des Systèmes Intelligents et de Robotique (ISIR), CNRS UMR 7222, INSERM U1150, Sorbonne Université, Paris, France
In the context of keyhole surgery, and more particularly of uterine biopsy, the fine automatic movements of a surgical instrument held by a robot with 3 active DOF’s require an exact knowledge of the point of rotation of the instrument. However, this center of rotation is not fixed and moves during an examination. This paper deals with a new method of detecting and updating the interaction matrix linking the movements of the robot with the surgical instrument. This is based on the method of updating the Jacobian matrix which is named the “Broyden method”. It is able to take into account body tissue deformations in real time in order to improve the pointing task for automatic movements of a surgical instrument in an unknown environment.
1 Introduction
During minimally invasive surgery (MIS), instruments and imaging devices are inserted into a patient through small orifices. The orifice can be artificial, e.g., during laparoscopy where cannulas are placed through the abdominal wall. It can also be natural, e.g., during a vaginal manipulation where a manipulator (and/or an ultrasound probe) is inserted through the patient’s vagina.
When an instrument is inserted through an orifice, forces appear at the insertion area and induced mechanical constraints. In order to guarantee the patient’s safety during a robotic keyhole surgery, these forces should be minimized and the most commonly solution is a kinematic solution. More precisely, inserting an instrument through an orifice is equivalent to rigidly constrains the movements of the instrument along 4 degrees of freedom (DOFs): one translation along the axis of the penetration and three rotations around a given point R. This kinematic constraint come from the assumption that the body stiffness in an orifice is maximal at an anatomical point A located a few millimeters under the body surface. Therefore, to minimize the forces at the insertion area it is necessary to achieve R = A.
Numerous solutions are implemented in the literature to cope with the kinematic constraint due to the insertion of the instrument through a cavity such as in laparoscopy or during prostate biopsies, etc. But most of them assume that the insertion point plays the role of a 2-DoF kinematic constraint. For example, it is the case for the 4-DOF robot exhibiting a remote center of motion (RCM) (Guthart and Salisbury, 2000; Wei et al., 2005) which needs a pre-operation placement prior to the instrument manipulation. Another solution is to use a fully actuated robot such as in (Schneider et al., 2004; Konietschke et al., 2009) where the kinematic constraint is solved by the robot control. This solution is currently used because it does not require a specific placement in the operating room but a registration of the insertion point is still necessary prior to the operation (Boctor et al., 2004; Dombre et al., 2004; Pham et al., 2015). The main limitation of all these approaches is that they use a model which does not always correspond to the reality. Indeed, in many cases, due to the deformation of the insertion area, minimizing the interaction forces at the entry of the instrument is not equivalent to perfectly pivoting around a fixed point. In different works, (Chalard et al., 2018; Smet et al., 2019), it has been shown that during different kinds of MIS it is not possible to consider the insertion area as a fixed point A around which the instrument rotates. Therefore, using solution as an installation calibration, registration, or control appears as not appropriated to deal with the minimization of the forces at the insertion area of the instrument. To cope with this assumption, the free-wrist robots (a spherical wrist without actuators, (Sackier and Wang, 1994; Munoz et al., 2000; Ortmaier and Hirzinger, 2000; Low and Phee, 2004)) are of great interest. With these devices, as the robot lets the instrument freely orient around the wrist center W, the insertion point constraint is automatically respected when the instrument tip is inserted into the patient. Moreover, the wrench applied to the patient at the insertion point is naturally minimized. However, a main drawback occurs when a precise location is to be reached by the instrument tip T. In such a situation, the robot positions its wrist center W in order to manipulate the tool from outside the patient. Obviously, the position of the tool tip T inside the patient results not only from the position of point W but also from the location of the so-called insertion point. In practice, one can rarely rely on the definition of a fixed insertion point, as backlash or deformation of the tissues surrounding the insertion area occur. This is particularly true for the uterine manipulation (Smet et al., 2019) which is one of the application of this paper.
The paper is as follows: Materials and Methods describes firstly the proposed procedure to biopsy deeply the uterus. The second part of the Materials and Methods is focused on the overall system to assist the gesture. Then, based on the anatomical description and other work, (Smet et al., 2019), robot specifications are defined and a robot probe-holder is chosen. This robot is an anthropomorphic arm with 3 actuated joint and a free wrist. Because of the free wrist, precise positioning requires the estimations of the kinematic constraint due to the interaction between the probe and the tissues. Two online model estimation based on the Adaptable Lever Arm Model (ALAM) and the Broyden method are described and tested in Precise Positioning and Simulation Results. It is implemented on a robotic control law in order to accurately position the probe tip. Finally, Results highlights different results validating our approach.
2 Materials and Methods
2.1 Proposed System
2.1.1 New Uterine Biopsies Procedure
There are a number of tools used by clinicians to diagnose women with tumors. It included physical exam, serum biomarkers, sampling/cytology, ultrasound (US), hysteroscopy, hysterosalpingography, magnetic resonance imaging (MRI) and computed tomography imaging. However, the only gold standard to distinguish a malignancy from a benign condition is a biopsy. Until now, only endometrial sampling performed. Endometrial biopsies may not provide the correct diagnosis unless the lesion has reached the surface of the endometrial cavity (Van der Bosch et al., 2012). These uterine biopsies are performed thanks to a hysteroscope inserted through the vagina into the uterus (Tamura et al., 2015). This procedure allows to sample only the tumors visible in the uterus cavity (submucosal tumor). It cannot be used to sample deeply in the uterus (subseral and/or intramural tumors), see Figure 2. In case of uterine fibroids, several studies (Van der Bosch et al., 2012), (Bansal et al., 2008), demonstrate the importance of exploring deeply the uterus in order to specify whether an observed tumor is benign or malignant. A targeted uterine biopsy system appears as essential (Kawamura et al., 2002), (Tamura et al., 2015) to reach prior to laparoscopic surgery of any uterine mass (see Figure 1). However, there is no routine tool allowing reliable deep sampling in the uterus. It requires the development of innovative functions exploiting state of the art in imaging and robotics to enable a secure, reproducible, and accurate sampling.
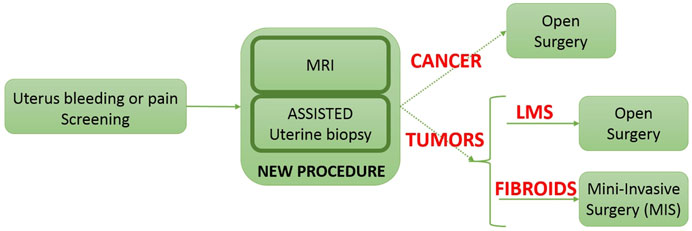
FIGURE 1. The new procedure which is able to identify the fibroids classification.
A study in progress (Tamura et al., 2015) on 63 patients concludes that ultrasound-guided needle biopsy may be a reliable preoperative diagnostic procedure for uterine tumors with suspected malignancy by MRI. The proposed approach, detailed in (Fazel et al., 2016), is based on trans-vaginal ultrasound needle biopsy. This procedure is similar to the procedure to sample the prostate under transrectal ultrasound images (Vitrani et al., 2016). During the proposed intervention, the patient lies on gynecological position. A trans-vaginal ultrasound probe and a needle guide attached to it are inserted in the patient’s vagina. Then, the clinician moves the probe toward a first desired biopsy site. When they think that the probe is well positioned, the clinician can proceed to the biopsy by inserting the needle through the needle-guide. They repeat the above procedure until all the biopsies have been done.
To reach each position, the probe is inserted through the vagina and its tip is in contact with the cervix (base of the uterus) which anatomy is described in (Bouton et al., 1990) (see Figure 2). According to surgeons, the probe tip has a small mobility within a 1 cm radius circle limited by the cervix and the vaginal wall, (Smet et al., 2019). Furthermore, the overall probe has to be moved in many orientations limited by the vagina wall. The overall workspace of the probe can be modelled by a truncated cone with 40° top angle, Figure 3.
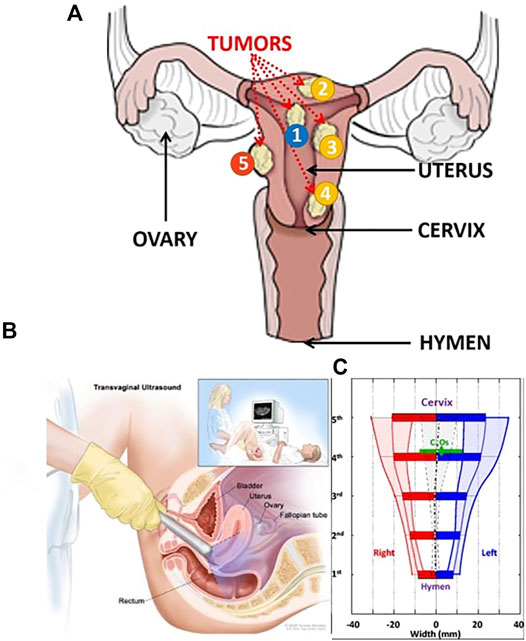
FIGURE 2. (A) Uterus description with all types of tumors (Ochsner, 2021),modified. In blue (label 1) it is the submucosal tumors, in yellow (label 2,3,4) the intramural tumors and in orange (label 5) the subserosal tumors. (B) Clinical routine for transvaginal echography and (C) Vaginal measured description (Luo et al., 2016) modified.
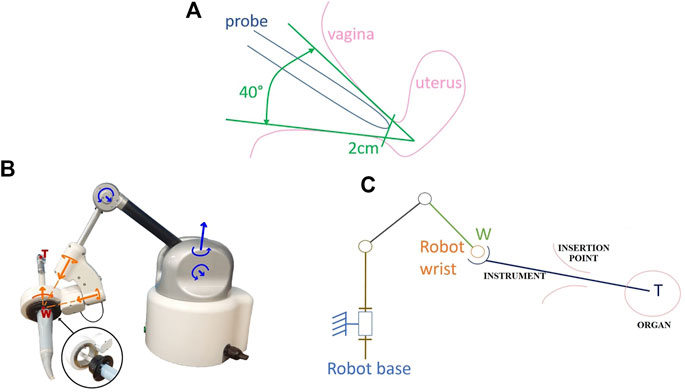
FIGURE 3. (A) Required workspace to manipulate the probe within the vagina (B) Apollo robot and (C) Kinematics scheme (Poquet et al., 2013).
2.1.2 Robotic Specification
To our knowledge, only two robots are proposed to manipulate a probe within a vagina, (Akrivos and Barton-Smith, 2013) and (Yip et al., 2017). Both of them are used for trans-vaginal uterine manipulation which does not require high precision. However, for uterine biopsy, the surgeon has to precisely position the probe (and the needle) while maintaining minimal effort on the cervix and the vagina (insertion zone). The robot control law must take into account the displacement and the deformation of the vagina. The mechanical-based RCM strategies can’t be relevant in our work. One can refer to two particularly interesting studies: the system presented in (Bonneau et al., 2004) which does not use any force sensor and the work of (Abolmaesumi et al., 2002). These systems focus on an ultrasound probe holder controlled by machine-vision to center a section of the carotid in the image: 3 degrees of freedom are controlled by machine-vision while the operator can control the other 3. An other work on robot-assisted ultrasound-guided biopsies have shown similar degree of precision in robot assisted transrectal prostate biopsy described in (Poquet et al., 2015). This is why we propose to use a comanipulated robot to assists the clinician’s gesture.
2.1.3 Robot Apollo
Apollo (Figure 3) fits in the category of the free-wrist comanipulators, although it differs from the existing systems by the functions it provides (Poquet et al., 2013). Instead of separating between robotic autonomous probe placement and human needle placement, it lets the clinician position the probe. This choice is motivated by the difficulty of planning a trajectory for the probe positioning when accounting for uterine displacement, eventual movements from the patient, anatomical constraints, etc.
It exhibits 6-DoFs to be compatible with all the required probe movements (Robotic Specification) while avoiding to constrain its placement with respect to the patient. While the robot base is placed close to the entry point, on the examination table, it allows the probe to cover the required workspace. This workspace was determined based on the clinical literature, (Bouton et al., 1990), (Tan et al., 2006), (Luo et al., 2016). Apollo is made of six pivot joints serially assembled according to a conventional anthropomorphic geometry. The three first active joints form the shoulder and the elbow while the wrist is composed of the three last passive joints. The wrist axes coincide at Point W (see Figure 3). The kinematics are sketched in Figure 3, where Point W is the wrist center while Point T is the probe tip. Note that the position of Point W with respect to the robot base only depends on the three first joint positions while the position of Point T also depends on the positions of the wrist joint. Kinematic models mapping joint positions into Point W or Point T positions follows directly from the Denavit and Hartenberg parameters given in Table.1, (Denavit and Hartenberg, 1955).
• The FREE mode, characterized by high transparency and gravity compensation. This allows for manually positioning the probe under US guidance.
• The LOCKED mode, during which the clinician has his/her hands free to perform the needle placement and the biopsy. Here, it is desired that the robot maintains precisely the target position, while preserving the patient’s safety.
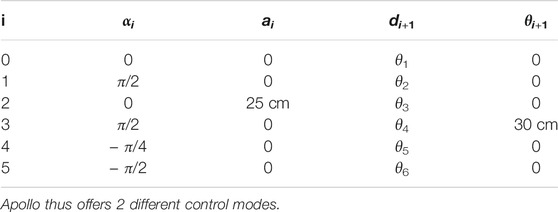
TABLE 1. DH parameters of the Apollo robot.
A third mode is aimed at automatically displacing the probe toward a desired anatomical location named “ADJUSTMENT”. This control mode is designed for controlling the desired position of the robot’s wrist center, Wd, while also preserving the patient’s safety (see Figure 4).

FIGURE 4. Control law of the robot’s wrist W.
The control law used is an impedance controller generating forces in response to position errors. Due to the passive wrist, the force transmission model at the W point is written:
Where:
•
• f is the equivalent force to the W point;
• Jv1,W is the Jacobian matrix associating the velocity of the first three joints of the robot with the cartesian velocity of the robot at the W point. By rating abuse, it will now be noted JW.
The control law described in Figure 4 is then written:
With:
• τgrav corresponds to the torque required to achieve the gravity compensation (Poquet et al., 2013);
• ɛW = Wd − W is the error between the desired position and the current position of the robot’s wrist W;
• kp and ki are the proportional gain and the integral gain, respectively, both of which are scalars.
Note that choosing sufficiently low values for kp and ki allows low stiffness at the Point W with a null static error (slow error cancellation despite perturbations at the insertion point).
It is antagonistic in the context of robot control: usually precision is achieved thanks to high stiffness while in order to respect the safety of the patient, control law requires a low impedance.
2.2 Precise Positioning
2.2.1 Problem Description
As explained in Robotic Specification, the goal of the robot is to improve the surgeon’s precision during the pointing task. The more the pointing task will be accurate the more the biopsy will be relevant. Based on the controller described previously (Robot Apollo), when a desired location Td is specified for the tip, one has to compute the corresponding desired position of the wrist center, Wd, which is easily controllable from the three first actuated joints of the robot. As both T and W belong to the probe (rigid body), one can write :
where vT and vW are the velocities of the probe with respect to the robot base expressed at point T and W respectively ; J is an interaction matrix. The displacement ΔT = Td − T0, between Td the desired position of T and T0 the initial position of T, is reached if the robot controls the position of W according to:
where W0 is the initial position of W. The resulting controller is shown Figure 5.

FIGURE 5. Controller with a well-known mapping between T and W displacements.
Because of the free wrist, it is not possible to control the position of Point T only based on the robot kinematic model. In the literature (Low and Phee, 2004; Ortmaier and Hirzinger, 2000; Dong and Morel, 2016), free wrist robots are used with the hypothesis that the insertion point is considered as a fixed rotation center of motion (RCM). However, it appears that the mapping from W displacements to T displacements depends on how the tissues surrounding the insertion site are deformed. In particular, the vagina is far from being precisely described by a fixed fulcrum model. It results in a complex relationship between the position of the robot wrist center W and the tip position T (see Figure 3) as it has been shown in (Smet et al., 2019). Thus, the matrix J has to be continuously updated to take it into account.
Therefore, in order to generalize a control law able to adapt to any medical application and more specially in uterine biopsy, it appears necessary to develop an estimator able to take into account the variability of the rotation point throughout an examination. Thus, a precise targeting task can be performed in gynecology and also in other MIS as laparoscopy, urology, etc.
To solve this new problem, two different estimators are developed.
• The first estimator, named Adaptable Lever Arm Model (ALAM), uses the well known lever arm model but continuously updates the
• The second method is derived from numerical methods for solving nonlinear problems of type y = F(x). This method, named Broyden’s method, allows to estimate directly a Jacobian matrix of size 3 × 3 linking two distinct variables.
It is now necessary to present and test them first in simulation and then on an experimental set-up.
2.2.2 Adaptable Lever Arm Model
When a desired position Td is specified to the robot for the tip of the instrument, it is necessary to calculate the corresponding desired position of its wrist center, Wd, which is controllable from the first three joints of the robot. However, as explained earlier, the interaction between the tip of the instrument T and the wrist center of the robot holding the instrument W cannot be considered as a perfect lever arm model with a fixed instrument rotation point. Clearly, the correspondence between the displacements of W and those of T depends on how the tissue surrounding the insertion site deforms. If we consider small movements (local representation), it is reasonable to assume that the behavior is linear, i.e., it is possible to write:
This specific structure of J comes from the fact that the inserted instrument is assumed to be rigid. Therefore, the displacements of W are assumed to be equal to the displacements of T on the
As explained in New Uterine Biopsies Procedure, during robot manipulation of the instrument,
An instantaneous measurement of the velocities vW and vT is thus sufficient to identify the 2 unknown elements of J because two equations are available (corresponding to the first and third lines of equation.6). However, exploiting the n successive measurements of vT and vW, assuming that they were recorded in sufficiently close configurations to consider that J is constant, allows to estimate
where λ is a scalar gain verifying 0 < λ < 1. In practice, λ is set small enough to filter out measurement noise and large enough to ensure a satisfactory adaptation rate.
Although this estimator allows to take tissue deformations around the insertion area of the instrument through the patient into account, it is still subject to the diagonal construction assumption of the interaction matrix. As a reminder, this assumption comes from the definition of the minimally invasive surgery instrument insertion problem as a linear annular connection.
However, making this assumption about the construction of
2.2.3 Broyden Model
System identification is a branch of automatic control that consists in obtaining a mathematical model of a system from measurements on it. The problem discussed here is written as the resolution of a nonlinear system.
In keyhole surgery, errors in the estimation of the instrument-patient interaction lead to a deterioration of the closed-loop behavior when the T point is returned to the controller. This can have a significant impact in real-world situations, where the interaction cannot be modeled as a support point and not known precisely in advance. For example, in (Chalard et al., 2018), it was shown that the insertion point can be moved more than 20 mm during a prostate biopsy. In (Smet et al., 2019) it is shown that manipulation of the uterus with an instrument through the vagina during surgery cannot be modeled as a pivot joint.
In fact, the mapping of J displacements from W to T depends on how the tissues surrounding the insertion site deform. As the deformation of the tissues cannot be modeled and depends on the insertion zone (uterus, anus, stomach, etc.), the interaction between
Moreover, to take the deformation of the tissues when the instrument is handled into account, J must be continuously estimated as
The problem stated above is a nonlinear optimization problem since the matrix J depends on the position W and the unknown environment. In the literature, the most common numerical method to solve this kind of problem is the Newton method. More particularly, when it is necessary to estimate a Jacobian matrix, the Broyden method is used. This is an iterative method that can be used to estimate the Jacobian matrix (Mansard et al., 2006) of a robot. This method uses an initial guess to generate an improvement sequence of approximate solutions. It gives good results assuming that the initial value is not too far from the actual value. In addition, this method has a low computational cost that allows for online estimation.
Based on the Broyden method (Broyden, 1965), it is possible to use the Broyden matrix by applying it directly to the context of medical robotics. Thus, the estimated matrix
where:
• δTk = Tk − Tk−1 is the measured displacement of the instrument tip T between the two iterations.
• δWk = Wk − Wk−1 is the measured displacement of the robot end effector W between the two iterations.
• α is a scalar gain.
The parameter α is a scalar gain between 0 and 1 which defines the update speed of the Algorithm. When setting this parameter, a compromise must be found between convergence speed and robustness. If the variation of the input data is too small or null, the computation can become unstable. To avoid this instability, it is necessary to verify:
A threshold is then introduced to ensure that the previous condition is verified:
where rɛ must be set according to the application. If the threshold is not reached, the matrix is not updated and:
3 Simulation Results
3.1 Identification Process
To choose the model that will give an identification as close as possible to the real interaction matrix, there is a multi-step identification procedure (Rachad et al., 2015), (Liu et al., 2015) that allows to test and compare different identification model structures. All categories are defined as:
• Test protocol: it needs sufficient data that represent the dynamics of the system. Pseudo-random signals are typically used as input to the system in order to have a good excitation of the system;
• Measurement and signal processing;
• Choice of model structure: choice of model type, initial conditions and convergence factor;
• Parametric identification: use of a parametric optimization algorithm;
• Validation of the model: execution of verification tests, analysis of the results;
To find the better identification model, the procedure consists in :
• first step: performing measurement and signal processing based on a test protocol;
• second step: extracting a parametric identification based on the measures in step one and the choice of a model;
• third step: validating the model.
• updating step : if the model is not validated, it is possible to repeat the procedure by updating the choice of the model, the test protocol and the parametric identification until you find the correct identification.
Based on this procedure, an experimental protocol is developed.
3.2 Data Acquisition
Two experiments were conducted to validate the proposed estimation method. During these experiments, the instrument is moved in comanipulation with the Apollo robot (the robot being in free mode). The positions of T and W are measured thanks to the sensors of the robot and acquired. Two experiments have been performed:
• For the first experiment, no environment applies any constraint to the instrument. The user freely manipulates the probe according to perpendicular translations while maintaining a constant orientation as illustrated in Figure 6). In this case, the displacement of T is equal to the displacement of W. This experiment will hereafter be called “movement 1”.
• In the second experiment, the instrument is inserted into an anatomical phantom. The user manipulates the instrument as they would during a gynecological or prostate examination (Figure 6). This experiment will be called ‘”movement 2”.
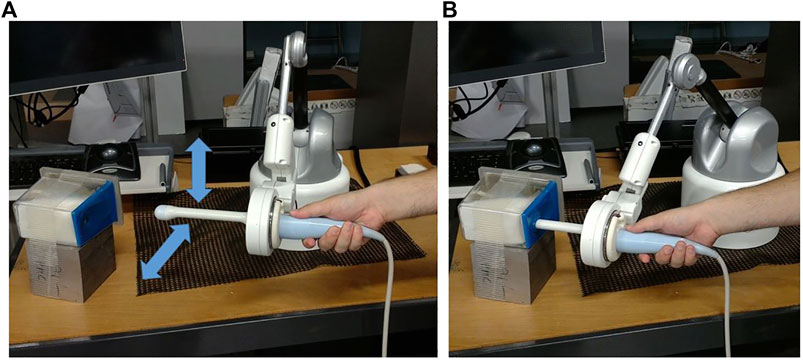
FIGURE 6. Experimental setup without environmental constraints (A), in an anatomical phantom (B).
After the experiment, the data are exploited in post-processing. In order to verify that the two estimators are performing well, they are both tested on the two experiments performed.
To validate their behavior, they are implemented in a simulation using the software Matlab. By recovering the positions of the robot end effector (Point W) and the positions of the instrument tip (Point T) it is possible to reconstruct a position of the instrument tip, noted Trec. It is calculated from the measured position of W and the matrix estimated by each of the two estimators, see Algorithm 1 and Algorithm 2.
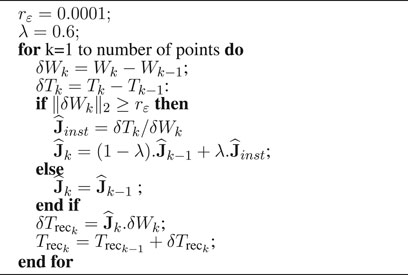
Algorithm 1. Reconstruction of the instrument tip based on the Adaptable Lever Arm Model (10 ms).
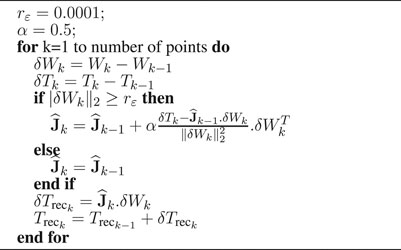
Algorithm 2. Reconstruction of the instrument tip based on the Broyden algorithm (10 ms).
Whatever the experiment and the estimator, the interaction matrix
Also, note that the values rɛ, α and λ are empirically chosen as:
• rɛ = 0.0001 (m);
• λ = 0.6;
• α = 0.5;
In particular, the rɛ value was set based on physical limits. Indeed, as defined in the previous section (Broyden Model), this threshold affects the Jacobian update based on the input data. In our case, the input data is the displacement of the point W. It was decided to update the Jacobian matrix if the robot is moving. Therefore, to take this into account, the rɛ value was set to one tenth of a millimeter between each 10 milliseconds. Then, thanks to an iterative method, the α and λ values were fixed in order to find a compromise between the convergence speed and the error reconstruction. Indeed, the closer their values are to 1, the higher the convergence speed of the algorithm. However, it strongly impacted by the input variation and conversely if the values of λ and α are close to 0.
The reconstructed positions of the instrument tip Trec are then compared to the actual position of the instrument tip measured by the robot, denoted
In this way, the smaller the
3.3 Reconstruction of the Interaction Matrix Based on ALAM and Broyden Method
The results of the four experiments are shown in the Figure 7.
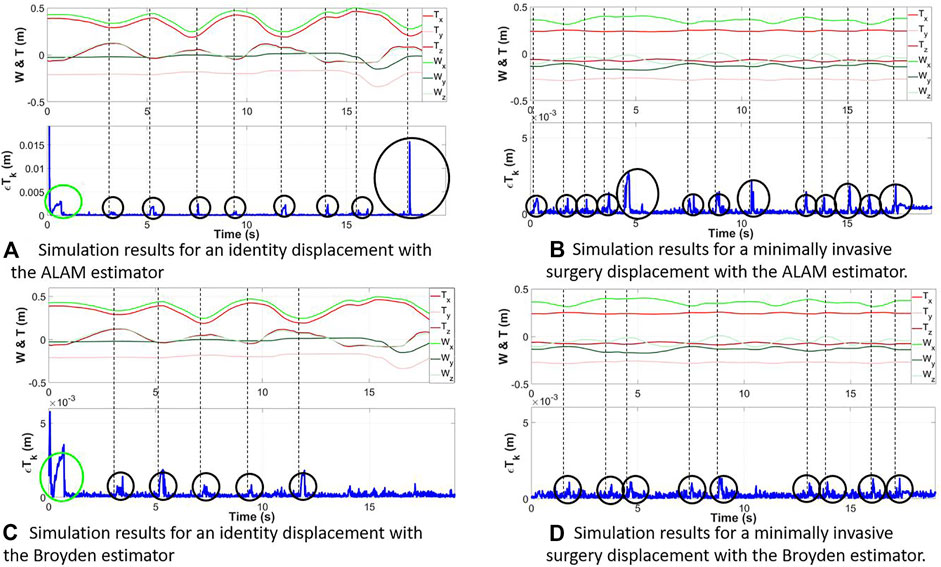
FIGURE 7. Measured position of the robot wrist (green) and the instrument tip (red) during a displacement. Evolution of the reconstruction error
For the movement 1:
• the average reconstructed error (
• the mean reconstructed error (
Moreover, for the movement 2:
• the average error (
• the mean error (
Whatever the movement or the chosen estimator, we can note the presence of error peaks (black circle) in Figure 7. They appear in the case of a sudden change in the direction of motion, highlighted by the dotted black vertical line. However, Figure 7 show that the two proposed methods succeed in cancelling the error after a few iterations.
Moreover, taking into account the particular link of the W and T points for the movement 1 (the wrist of the robot and the tip of the probe have the same speed), the green circle visible on Figures 7A,C highlights a peak in the reconstruction error due to the initial value of
Concerning the ‘movement 2′, the changes of direction are smoother because of the constraint of the insertion which has the effect of making the peaks of reconstruction error almost disappear. This can also be seen from the mean values of the reconstruction errors as well as their standard deviation for ‘movement 2′ which are, for both estimators, lower than for ‘movement 1’.
3.4 Discussion
As a comparison, a simulation using a fixed lever arm model was tested. This model is one of the most used in the literature and was implemented based on a pre-test placement (Wei et al., 2005). It was only implemented on the “movement 2” which corresponds to a mini-invasive type of movement. The results of this simulation can be found in Figure 8. The average error (
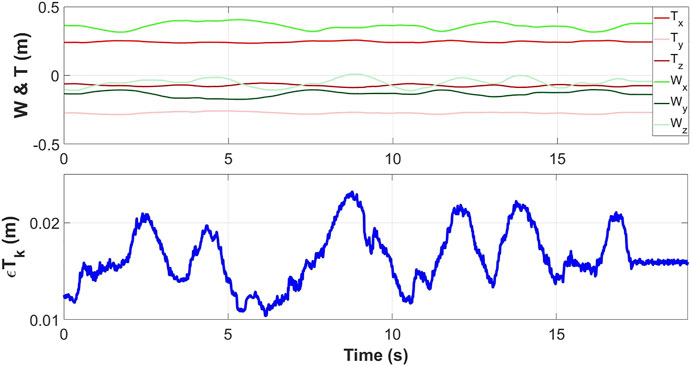
FIGURE 8. Measured position of the robot wrist (green) and the instrument tip (red) during a displacement. Offline reconstructed error
Regardless of the movement, based on the mean error (and standard deviation) and overall performance (Figure 7), it can be concluded that both of the proposed methods for estimating the interaction matrix continuously are more effective than the fixed lever arm model. They both correctly estimated the position of the instrument tip at any time. To face these problems of non-fixed or even non-existent insertion point, it is proposed to implement the estimators tested in simulation on an experimental set-up to validate their interest.
4 Results
4.1 Experimental Set-Up
As explained in Problem Description, it is possible to realize fine automatic movements by controlling the wrist of the robot thanks to the controller detailed previously (Figure 6). Moreover, as highlighted in Precise Positioning, to reach a target with the probe tip (point T) by controlling the robot wrist (point W), it is necessary to accurately estimate the J interaction between W and point T (see Figure 9). The estimators are thus implemented in the open-loop control described in Problem Description. Indeed, by implementing the two estimators in the open loop control and by comparing them to a classical calibration estimate at the beginning of the test, it is enough to look at the final positioning error to know the most efficient and reliable method. Based on this consideration, the accuracy of the estimator could be measured through real displacements of the probe. Indeed, by controlling the wrist of the robot, the better the estimation of the interaction matrix, the closer the final position T will be to the desired position T. To quantify the displacements, a laser is attached to the probe. The laser is pointed on a graph paper and the pointing error is thus recorded at the end of the probe movement (see Figure 10).
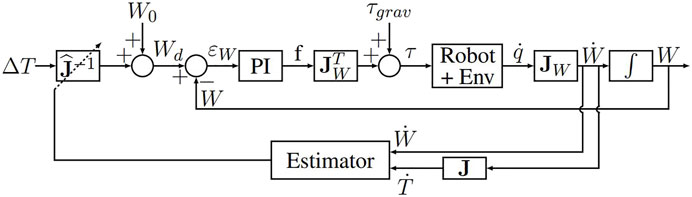
FIGURE 9. Open loop control of the Apollo robot for automatic fine movements of the instrument tip taking into account the elasticity of the environment.
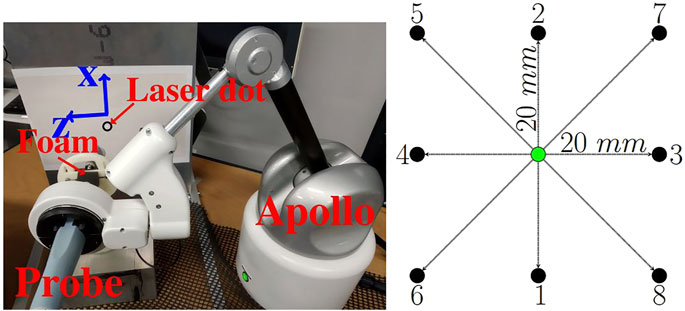
FIGURE 10. Set-up and targets.
In order to ensure the accuracy of the estimators, the targets are chosen to be able to verify the correlation and/or the decorrelation of the displacements due to tissue deformations. Indeed, it is interesting to perform displacements along a single axis and also along 2 axes simultaneously. The targets are defined as the corners of the square (Targets 5, 6, 7 and 8, see Figure 10). The square is designed as a 40 mm side square. Each middle of the sides of the square forms the other 4 targets (Targets 1, 2, 3 and 4, see Figure 10). For each targeting task, the starting point is the center of the square. This allows movements of different lengths (20 and 28.3 mm). In addition, the square is covered three times, so each target was reached three times. Moreover, in order to simulate anatomical constraints (elasticity, no RCM, etc), the insertion point is covered with foam (see Figure 10). Thus, regardless of the displacement, the interaction between the W and T points is still unknown. Note that in order to be relevant with the Sec.2.2.1, the initial value of the interaction matrix J is always the same.
In order to be able to position our work with respect to the existing literature on the positioning of surgical instruments during prostate or uterine surgery, a fixed RCM type control found in the literature (Yip et al., 2017) was also implemented (see Figure 5). In this configuration, the initialization of the interaction matrix
It should be noted that for the displacements with the Adaptive Lever Arm Model (ALAM) the displacements will be restricted to targets 1, 2, 3 and 4 with displacements of 10 mm. Moreover, as the experiments were not performed at the same time as those for the Broyden model, the initial value of the initialization matrix differs and is fixed at:
In order to standardize the results obtained for each of the two estimators, they are both compared to a classical calibration method performed with robotic systems having RCM (as it has been defined in Discussion).
4.2 Evaluation of the Two Estimators
4.2.1 Adaptable Lever Arm Model
Table.2 contains the different errors obtained by using a constant
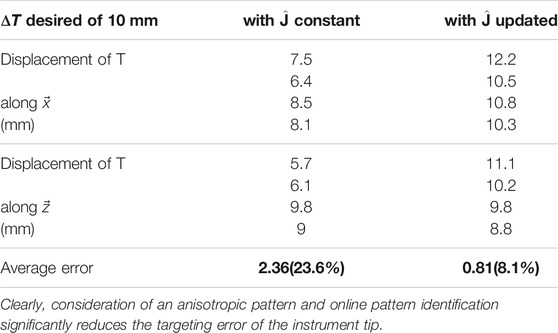
TABLE 2. Displacement standard for each transverse side given by Apollo with
4.2.2 Broyden Model
Figure 11 compares the errors obtained using a fixed RCM model and a continuously updated
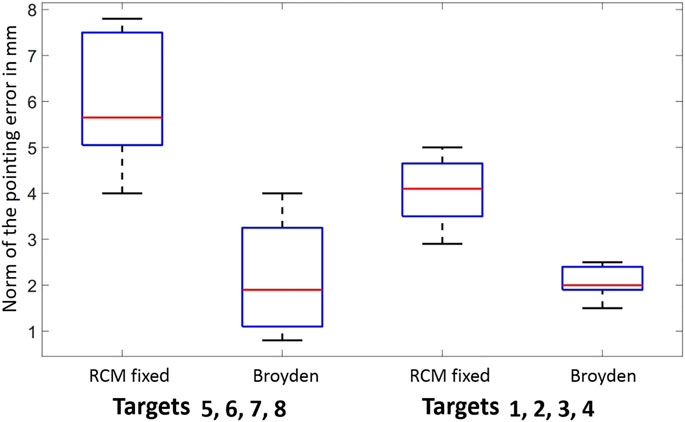
FIGURE 11. Average error of the scoring task with the RCM Fixed model and the Broyden Model.
It appears that the controller based on the continuous estimation of the interaction matrix using the Broyden method is better than the controller based on the fixed RCM.
Specifically, for targets 1, 2, 3, and 4 the Broyden controller reduces the pointing error by more than 2 mm for a 20 mm displacement compared to the fixed RCM controller. In addition, for targets 5, 6, 7, and 8, we reduce the pointing error by more than 3 mm. Overall, for all displacements, the accuracy of the pointing task is improved by 11.8% with the Broyden controller. In detail, the accuracy for all moves is:
• Broyden controller accuracy = 91.1%
• Fixed RCM controller accuracy = 79.3%
4.3 Discussion
Clearly, taking a numerical model based on the Broyden method to continuously identify the J interatcion matrix into account significantly reduces the pointing error. Although both estimators improve the open-loop control with our set-up in a similar way, the choice of the Broyden model is selected. Indeed, although trying to reproduce the behavior of the vagina anatomy as well as possible, the set-up seems to be more similar to the conditions of prostate biopsy or laparoscopy. In this context both estimators improve the overall behavior of the open-loop control compared to the fixed lever arm model. However, if we look at the description of the uterus, the Broyden algorithm is more recommended than the adaptive lever arm model. Indeed, in (Smet et al., 2019), it is shown that it is impossible to consider the insertion zone as a rotation point. Therefore, the estimation model based on an adaptive lever arm model appears less relevant for this medical examination.
5 Discussion
Therefore, after testing both estimators in simulation and in experimental set-ups, the Broyden method clearly appears as the better solution. It cans take the deformation of the insertion area into account during MIS in order to precisely position the instrument tip.
Moreover, the best solution to reach a target with a robot is to use a close loop controller on the instrument tip. It guarantees a zero error for the targeting tasks of the instrument tip. Closing the loop at point T is then possible with the following control law (see Figure 12):
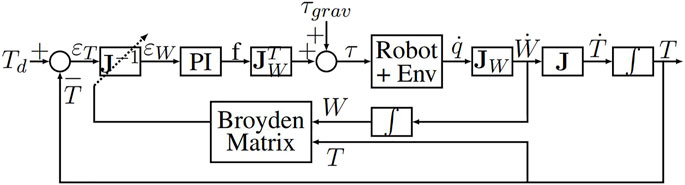
FIGURE 12. Closed loop control of the Apollo robot for automatic fine movements of the instrument tip taking the elasticity of the environment into account.
With such a controller, due to the integration of ɛT, a null error at point T is guaranteed providing that the system remains stable. The control law and the results are described in (Chalard et al., 2020). This leads to the conclusion that controlling fine automatic displacements of the instrument tip in close loop control by taking the elasticity/deformations of the insertion zone into account thanks to the Broyden estimator allows to increase tenfold the performances of the targeting task. Indeed, with a continuous estimation of the J interaction matrix, the convergence towards the desired target is achieved on average 5 times faster than with an estimated interaction matrix considered fixed (see Figure 13).
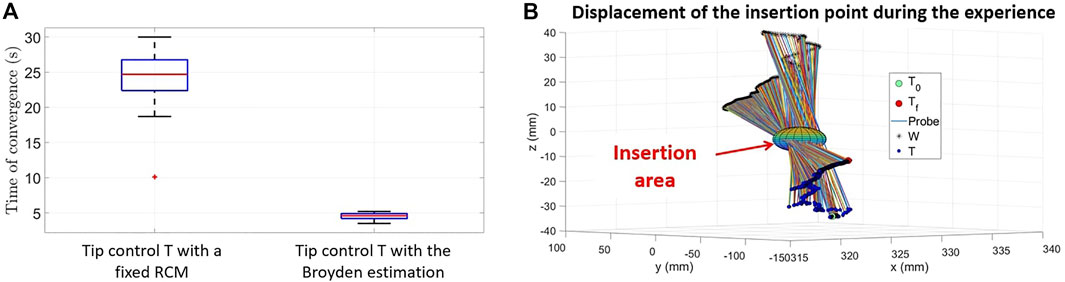
FIGURE 13. (A) Convergence time for the 40 trials (Controller without adaptation vs Controller with adaptation) and (B) Highlighting of an “insertion area” in the developed experimental set-up.
It should also be noted that, as with the movements made with the open loop controllers, the insertion point around which the instrument rotates instantaneously is not fixed. As shown in Figure 13 it can indeed move in a 2 cm wide area.
Conclusion
This paper focuses on the definition of the interaction matrix J and its importance for the realization of a precise control in minimally invasive robotic surgery and more particularly for uterus biopsy. Indeed, it is shown that if this matrix is badly estimated, it cans have undesirable consequences on the control of the robot and sometimes lead to a divergence of the system. In the literature, the most common method to identify J is to consider the interaction between the instrument held by the robot and the patient’s body as an annular linear link. This kinematic constraint restricted the working space to 4 degrees of freedom. Considering the insertion point as fixed, many robots have been developed with an offset center of rotation (RCM). These can either be mechanically imposed and are then called “active” or directly imposed by the anatomy of the insertion point and considered as ‘passive’. In the first case, the surgeon must manually match the remote rotation point of the robot with the rotation point of the instrument imposed by the anatomy. In the second case, the rotation point of the instrument is unknown to the robot. To overcome this problem, 6 degrees of freedom robots have been designed. Thanks to their sensor data, they are able to reconstruct a mean rotation point close to the actual rotation point of the instrument using a least squares algorithm (Dong and Morel, 2016). Although each of these options has its advantages and disadvantages, the biggest issue lies in the assumption of their design. Indeed, studies have shown that the actual point of rotation of the instrument cannot be considered as fixed throughout a surgery. It is subject to variations in position due, among other things, to the elasticity of the tissues surrounding the insertion zone of the instrument.
The models of the literature are till sufficient to perform tasks requiring little precision (coarse displacement of an endoscope controlled by the surgeon) and more generally to perform tasks involving direct control of the robot by the surgeon. However they cannot be applied to a task such as fine automatic displacement where the surgeon no longer intervenes in the control loop.
To account for this new assumption, two models (Adaptive Lever Arm Model and Broyden) have been developed. They can continuously identify the interaction matrix linking the instrument tip velocity with the robot effector velocity. In this paper, simulations on post-processed robot’s data have:
• showed the importance of taking into account the displacement of the rotation point of the instrument during a manipulation;
• validated the working principle of the proposed estimators to continuously identify the J interaction matrix.
In order to experimentally validate the results obtained in simulation, these two estimation models were then implemented on the Apollo robot to validate them on an experimental set-up.
Both estimators were implemented in an open loop control of the probe tip in order to evaluate their performance against the RCM solution found in the literature. From an experimental set-up simulating the insertion of an endocavity probe through an unknown sinking, automatic fine displacements are then re-assembled. Although both estimators are better than the one developed in the literature, only the estimator based on Broyden’s method is retained. Indeed, the anatomical constraints related to the biopsy of the uterus do not allow to define the displacement of the probe from a rotation of the probe around a variable point. Therefore, although its results are similar to Broyden’s model, the Adaptable Lever Arm Model (ALAM) construction hypothesis appears inconsistent with our application.
Although experimentally validated on an in vitro laboratory set-up and implemented on a close loop controller, the Broyden method will be necessary from now on to carry out an experimental set-up reproducing the vagina and the uterus as faithfully as possible. It needs to be tested and validated on an ultra-realistic set-up in order to hope to carry out in-vivo tests.
Data Availability Statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author Contributions
In this paper, RC, AF, and M-AV proposed a novel procedure to detect and classify the uterine tumors. The research topic is a new approach to take insertion area forces into account during uterine biopises. RC conducted all the simulations and experiments. RC also wrote the manuscript. M-AV provided continuous guidance and feedback regarding the proposed results and during all the redaction process. AF brought an expert eye as a surgeon and provided valuable feedback on the clinician context.
Funding
This work was supported by the French state funds managed by the ANR (Agence Nationale de la Recherche) within the Invesissements d’Avenir Program (Labex CAMI) under Reference ANR-11-LABX-0004 and within the ROBUST project ANR-17-CE19-0023.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abolmaesumi, P., Salcudean, S. E., Wen-Hong Zhu, M. R., Sirouspour, M. R., and DiMaio, S. P. (2002). Image-guided Control of a Robot for Medical Ultrasound. IEEE Trans. Robot. Automat. 18, 11–23. doi:10.1109/70.988970
Akrivos, N., and Barton-Smith, P. (2013). A Pilot Study of Robotic Uterine and Vaginal Vault Manipulation: The Viky Uterine Positioner. J. Robotic Surg. 7, 371–375. doi:10.1007/s11701-013-0406-3
Bansal, N., Herzog, T. J., Burke, W., Cohen, C. J., and Wright, J. D. (2008). The Utility of Preoperative Endometrial Sampling for the Detection of Uterine Sarcomas. Gynecol. Oncol., 110, 43–48. doi:10.1016/j.ygyno.2008.02.026
Boctor, E., Webster, R.J., Mathieu, H., Okamura, A., and Fichtinger, G. (2004). Virtual Remote Center of Motion Control for Needle Placement Robots‡. Comp. Aided Surg. 9, 175–183. doi:10.1080/10929080500097661
Bonneau, E., Taha, F., Gravez, P., and Lamy, S. (2004). Surgicobot: Surgical Gesture Assistance Cobot for Maxillo-Facial Interventions, 353–360. doi:10.1142/9789812702678_0048
Bouton, J.-M., Dehnez, M., Eboue, F., Hainaut, F., Michelin, J., and Mac Aleese, J. (1990). Pratique de l’echographie en gynecologie et obstetrique.
Broyden, C. G. (1965). A Class of Methods for Solving Nonlinear Simultaneous Equations. Math. Comp. 19, 577. doi:10.1090/S0025-5718-1965-0198670-6
Chalard, R., Reversat, D., Morel, G., Mozer, P., and Vitrani, M.-A. (2018). Precisely Positioning the Tip of an Instrument Inserted through an Orifice with a Free Wrist Robot: Application to Prostate Biopsies, International Journal of Computer Assisted Radiology and Surgery, Int. J. CARS. 13, 611–618. doi:10.1007/s11548-018-1718-6
Chalard, R., Reversat, D., Morel, G., and Vitrani, M.-A. (2020). “Fast and Accurate Intracorporeal Targeting through an Anatomical Orifice Exhibiting Unknown Behavior,” in IEEE International Conference on Robotics and Automation (Paris, France: ICRA).
Denavit, J., and Hartenberg, R. S. (1955). A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices. Trans. ASME. J. Appl. Mech. 22, 215–221. doi:10.1115/1.4011045
Dombre, E., Michelin, M., Pierrot, F., Poignet, P., Bidaud, P., Morel, G., Ortmaier, T., Sallé, D., Zemiti, N., Gravez, P., Karouia, M., and Bonnet, N. (2004). “Marge Project: Design, Modeling and Control of Assistive Devices for Minimally Invasive Surgery,” in Medical Image Computing and Computer-Assisted Intervention – MICCAI 2004: 7th International Conference, Saint-Malo, France, September 26-29, 2004. Editors C. Barillot, D. R. Haynor, and P. Hellier (Berlin, Heidelberg: Springer Berlin Heidelberg), 1–8. Proceedings, Part II. doi:10.1007/978-3-540-30136-3_1
Fazel, A., Vitrani, M.-A., Gaudrard, E., and Baumann, M. (2016). Robotic Biopsy of the Uterus Standardized Technique (Robust): A New Technique for Uterine Biopsy Prior to Minimally Invasive Surgery, 3, 227–228.7.
Guthart, G., and Salisbury, J. (2000). “The Intuitive Telesurgery System : Overview and Application,” in Proc IEEE International Conference on Robotics and Automation, 2000 , 618–621.
Kawamura, N., Ichimura, T., Ito, F., Shibata, S., Takahashi, K., Tsujimura, A., et al. (2002). Transcervical Needle Biopsy for the Differential Diagnosis between Uterine Sarcoma and Leiomyoma. Cancer, 94(6), 1713–1720. doi:10.1002/cncr.10382
Konietschke, R., Hagn, U., Nickl, M., Jörg, S., Tobergte, A., Passig, G., et al. (2009). “The Dlr Mirosurge – a Robotic System for Surgery,” in IEEE International Conference on Robotics and Automation, 1589–1590.
Lin Dong, L., and Morel, G. (2016). “Robust Trocar Detection and Localization during Robot-Assisted Endoscopic Surgery,” in 2016 IEEE International Conference on Robotics and Automation (Stockholm, Sweden: ICRA), 4109–4114. doi:10.1109/ICRA.2016.7487602
Liu, H., Zhu, L., Pan, Z., Bai, F., Liu, Y., Liu, Y., et al. (2015). Armax-based Transfer Function Model Identification Using Wide-Area Measurement for Adaptive and Coordinated Damping Control. IEEE Trans. Smart Grid. doi:10.1109/TSG.2015.2470648
Low, S. C., and Phee, L. (2004). “A Review of Master-Slave Robotic Systems for Surgery,” in IEEE Conference on Robotics, Automation and Mechatronics, 2004, 11, 37–42. doi:10.1109/RAMECH.2004.1438888
Luo, J., Betschart, C., Ashton-Miller, J. A., and DeLancey, J. O. L. (2016). Quantitative Analyses of Variability in normal Vaginal Shape and Dimension on Mr Images. Int. Urogynecol. J. 27 (7), 1087–1095. doi:10.1007/s00192-016-2949-0
Mansard, N., Lopes, M., Santos-Victor, J., and Chaumette, F. (2006). “Jacobian Learning Methods for Tasks Sequencing in Visual Servoing,” in 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 4284–4290. doi:10.1109/iros.2006.281958
Munoz, V. F., Vara-Thorbeck, C., DeGabriel, J. G., Lozano, J. F., Sanchez-Badajoz, E., Garcia-Cerezo, A., Toscano, R., and Jimenez-Garrido, A. (2000). “A Medical Robotic Assistant for Minimally Invasive Surgery,” in Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), 33, 2901–2906. doi:10.1109/ROBOT.2000.846468
Ochsner (2021). Available at: https://www.ochsner.org/services/uterine-fibroids.
Ortmaier, T., and Hirzinger, G. (2000). “Cartesian Control Issues for Minimally Invasive Robot Surgery,” in Proceedings 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (Takamatsu, Japan: IROS 2000), Cat. No.00CH37113, 11, 565–571. doi:10.1109/IROS.2000.894664
Pham, C. D., Coutinho, F., Leite, A. C., Lizarralde, F., From, P. J., and Johansson, R. (2015). “Analysis of a Moving Remote center of Motion for Robotics-Assisted Minimally Invasive Surgery,” in 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1440–1446. doi:10.1109/IROS.2015.7353557
Poquet, C., Mozer, P., Morel, G., and Vitrani, M.-A. (2013). A Novel Comanipulation Device for Assisting Needle Placement in Ultrasound Guided Prostate Biopsies. IEEE, 4084–4091. doi:10.1109/IROS.2013.6696941
Poquet, C., Mozer, P., Vitrani, M.-A., and Morel, G. (2015). An Endorectal Ultrasound Probe Comanipulator with Hybrid Actuation Combining Brakes and Motors. Ieee/asme Trans. Mechatron. 20, 186–196. doi:10.1109/tmech.2014.2314859
Rachad, S., Nsiri, B., and Bensassi, B. (2015). System Identification of Inventory System Using Arx and Armax Models. Int. J. Control. Automation 8 (2 83)–2 94. doi:10.14257/ijca.2015.8.12.26
Sackier, J. M., and Wang, Y. (1994). Robotically Assisted Laparoscopic Surgery. Surg. Endosc. 8, 63–66. doi:10.1007/bf02909496
Schneider, C. M., Okamura, A. M., and Fichtinger, G. (2004). “A Robotic System for Transrectal Needle Insertion into the Prostate with Integrated Ultrasound,” in 2004 IEEE International Conference on Robotics and Automation (New Orleans, LA: Proceedings. ICRA ’04), 11, 365–370. doi:10.1109/ROBOT.2004.1307177
Smet, J. D., Deprest, J., Thys, A., and Poorten, E. V. (2019). In-vivo Force Sensing during Laparoscopic Sacrocolpopexy Vaginal Vault Manipulation. doi:10.21227/tqyc-d305
Tamura, R., Yoshihara, K., Yamawaki, K., Suda, K., Ishiguro, T., Adachi, S., et al. (2015). Novel Kinase Fusion Transcripts Found in Endometrial Cancer. Sci. Rep. 5, 18657. doi:10.1038/srep18657
Tan, J. S., Lukacz, E. S., Menefee, S. A., Luber, K. M., Albo, M. E., and Nager, C. W. (2006). Determinants of Vaginal Length, Am. J. Obstet. Gynecol., 195(6), 1846–1850. doi:10.1016/j.ajog.2006.06.063
Van der Bosch, T., Coosemans, A., Morina, M., Timmerman, D., and Amant, F. (2012). Screening for Uterine Tumors, 26, 257–266.
Vitrani, M.-A., Baumann, M., Reversat, D., Morel, G., Moreau-Gaudry, A., and Mozer, P. (2016). “Prostate Biopsies Assisted by Comanipulated Probe-Holder: First in Man,” in International Journal of Computer Assisted Radiology and Surgery (Springer Berlin Heidelberg), 11, 1153–1161. Int. J. CARS, Bench to Bedside Award”. doi:10.1007/s11548-016-1399-y
Wei, Z., Ding, M., Downey, D., and Fenster, A. (2005). “3d Trus Guided Robot Assisted Prostate Brachytherapy,” in Medical Image Computing and Computer-Assisted Intervention, MICCAI 2005. Editors J. Duncan, and G. Gerig (Springer Berlin Heidelbergof Lecture Notes in Computer Science), 3750, 17–24. doi:10.1007/11566489_3
Keywords: uterine biopsy, probe holder, reaching task, online identification, robotic
Citation: Chalard R, Fazel A and Vitrani M-A (2021) Real Time Estimator to Perform Targeted Biopsies With a Free-Wrist Robot Despite Large Deformations of the Insertion Orifice. Front. Robot. AI 8:780505. doi: 10.3389/frobt.2021.780505
Received: 21 September 2021; Accepted: 18 October 2021;
Published: 15 November 2021.
Edited by:
Anzhu Gao, Shanghai Jiao Tong University, ChinaReviewed by:
Shaoping Huang, Shanghai Jiao Tong University, ChinaZicong Wu, King’s College London, United Kingdom
Copyright © 2021 Chalard , Fazel and Vitrani. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Marie-Aude Vitrani, bWFyaWUtYXVkZS52aXRyYW5pQHNvcmJvbm5lLXVuaXZlcnNpdGUuZnI=