 Carlotta Mummolo
Carlotta Mummolo Kubra Akbas
Kubra Akbas Giuseppe Carbone2
Giuseppe Carbone2
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Robot. AI, 26 February 2021
Sec. Humanoid Robotics
Volume 8 - 2021 | https://doi.org/10.3389/frobt.2021.613038
This article is part of the Research TopicMechanics of Legged Robots: From Bio-Inspiration to Novel Legged MachinesView all 8 articles
The human ability of keeping balance during various locomotion tasks is attributed to our capability of withstanding complex interactions with the environment and coordinating whole-body movements. Despite this, several stability analysis methods are limited by the use of overly simplified biped and foot structures and corresponding contact models. As a result, existing stability criteria tend to be overly restrictive and do not represent the full balance capabilities of complex biped systems. The proposed methodology allows for the characterization of the balance capabilities of general biped models (ranging from reduced-order to whole-body) with segmented feet. Limits of dynamic balance are evaluated by the Boundary of Balance (BoB) and the associated novel balance indicators, both formulated in the Center of Mass (COM) state space. Intermittent heel, flat, and toe contacts are enabled by a contact model that maps discrete contact modes into corresponding center of pressure constraints. For demonstration purposes, the BoB and balance indicators are evaluated for a whole-body biped model with segmented feet representative of the human-like standing posture in the sagittal plane. The BoB is numerically constructed as the set of maximum allowable COM perturbations that the biped can sustain along a prescribed direction. For each point of the BoB, a constrained trajectory optimization algorithm generates the biped’s whole-body trajectory as it recovers from extreme COM velocity perturbations in the anterior–posterior direction. Balance capabilities for the cases of flat and segmented feet are compared, demonstrating the functional role the foot model plays in the limits of postural balance. The state-space evaluation of the BoB and balance indicators allows for a direct comparison between the proposed balance benchmark and existing stability criteria based on reduced-order models [e.g., Linear Inverted Pendulum (LIP)] and their associated stability metrics [e.g., Margin of Stability (MOS)]. The proposed characterization of balance capabilities provides an important benchmarking framework for the stability of general biped/foot systems.
The human body demonstrates agile and stable movements through its whole-body dynamics and complex interactions with the environment (Deschamps et al., 2011; Ku et al., 2012). The coordination of multiple body segments and the interaction between the feet and the ground are two crucial components determining the dynamic balance performance of both humans and legged robots. Proper modeling and quantification of these two components during various balancing tasks is important for understanding the limits of bipedal postural and gait stability.
A multi-segment foot structure enables rich contact sequences as it interacts with the ground during walking, stepping, and push-recovery tasks. In human locomotion, the heel detaches from the ground, causing the ground reaction force to move towards the front of the foot and generate the push-off phase (Sadeghi et al., 2001), which is critical for energy efficiency (Collins and Kuo, 2010; Zelik et al., 2014; Kim and Collins, 2015). The heel-to-toe rocking motion has proven to be associated with a reduced metabolic/energetic cost in human (Burnfield, 2010), robotic (Farizeh and Sadigh, 2014; Griffin et al., 2018), and prosthetic gaits (Kim and Collins, 2015). While numerous studies have focused on the effects of the toe link in human (Hughes et al., 1990; Kerrigan et al., 2000) and humanoid walking (Nishiwaki et al., 2002; Huang et al., 2012; Agarwal and Popovic, 2018; Sadedel et al., 2018; Hashimoto, 2020), most of the existing balance approaches are formulated under the flat-foot model assumption, in which the foot is modeled as a single rigid link in fixed contact with the ground. Few studies have addressed the important role of a refined foot-ground contact model in human postural control (Ivanenko et al., 1997; Nolan and Kerrigan, 2004). During balancing tasks, the recovery action from a perturbed posture could benefit from intermittent heel and toe rocking, when compared to the flat-foot model. Nevertheless, very limited studies have investigated this in human experiments (Murnaghan et al., 2009), biped robot design (Vukobratović et al., 2008; Kouchaki et al., 2012; Torricelli et al., 2016), or balance control (Yang et al., 2017). The rigorous quantification of the isolated contribution of a segmented foot model on the balance capabilities of a general biped system has not yet been addressed.
Another common modeling assumption for bipeds is the reduced-order model approach, in which the full body dynamics is reduced to the dynamics of a point mass (Mummolo et al., 2015). The advantages and disadvantages of using either a multi-segment whole-body model or a point-mass reduced-order model are inherent in the type of analysis under consideration. A whole-body approach generally increases the computational complexity, causing difficulty for real-time or wireless controllers. By using a reduced-order model, the complex nonlinear dynamics of the biped is simplified (often linearized) so that the system is more easily characterized and controlled. Most of the existing stability criteria are based on reduced-order models, inspired by the Inverted Pendulum (IP) analogy for biped systems. These criteria have led to the development of popular IP-based balance controllers (Elhasairi and Pechev, 2015; Shafiee-Ashtiani et al., 2017; Liu et al., 2019). On the other hand, the whole-body approach includes rich information regarding the system’s dynamics, such as the angular momentum generated by the arms, legs, and other segments of the body (Peng et al., 2020). Several studies demonstrated the importance of the angular momentum contribution to postural and walking stability of humans and robots (Herr and Popovic, 2008; Englsberger and Ott, 2012; Koolen et al., 2016a; Wensing and Orin, 2016; Boström et al., 2018). Additionally, a multi-segment body model allows for the explicit inclusion of individual joint torque and angle limits, which have a direct effect on the amount of centroidal linear and angular momentum the system can generate to control its balance. For these reasons, stability criteria and controllers previously based on reduced-order IP models are being redesigned to incorporate the missing components available in the whole-body dynamics of humans and multi-segment biped models (Koolen et al., 2016a; Bruijn and Van Dieën, 2018; Hinata and Nenchev, 2018; Pickle et al., 2018; Seyde et al., 2018; Liu et al., 2019; Mesesan et al., 2019).
In summary, the inclusion of segmented feet and the consideration of whole-body dynamics are two important design characteristics that critically influence the balance capabilities of legged mechanisms. However, there is a lack of comprehensive methodologies that include these two characteristics within a quantitative balance assessment framework. This is in part due to the limitations of existing stability criteria, which are either lacking general applicability (e.g., extension to multi-contact foot support, higher-order models, and various terrains) or missing important factors in the dynamics of bipedal balance (e.g., response to large perturbations, friction, joint angle and torque limits, etc.), thus, failing to provide a consistent methodology for the systematic quantification of a region of balance for generic biped systems in various environments. For instance, the majority of balance assessment is performed through the use of trackable points, such as center of pressure (COP) and center of mass (COM), whose trajectories are monitored relative to a region of validity, i.e., the contact area between the feet and the ground (Goswami, 1999; Wight et al., 2008; Millard et al., 2012; van Zutven and Nijmeijer, 2013). Both the COM and COP sways have long given practical measures of postural and walking stability in humans (Mizrahi et al., 1989; Maurer and Peterka, 2005; Germanotta et al., 2021) as well as reference trajectories for biped robot’s balance control (e.g., ZMP control (Sugihara and Yamamoto, 2017; Cho and Kim, 2018)). However, these reference points lack other critical information, such as the velocity of the system’s COM, fail for large initial conditions, and cannot provide a necessary nor a sufficient condition for bipeds’ balance in presence of various perturbations and detailed system and physics constraints.
A general and comprehensive stability criterion should provide a systematic methodology that separates between the conditions of balanced and unbalanced for any given biped system by taking into account all possible factors that could lead the given system to a loss of balance. A classical approach for assessing the dynamic balance of a legged system is to use the extrapolated COM (XCoM) and its associated stability metric, the Margin of Stability (MOS) (Hof et al., 2005). The XCoM, also called instantaneous capture point (Pratt et al., 2006; Pratt and Drakunov, 2007; Englsberger et al., 2011; Koolen et al., 2012) or divergent component of motion (Englsberger et al., 2015; Mesesan et al., 2019), can predict the limits of dynamic balance of a linear inverted pendulum (LIP) model by considering both COM position and velocity and provides a quantifiable threshold between the conditions of balanced and unbalanced. The MOS is a measure of how distant the system is to this threshold and, due to its simplicity, it has been extensively used in both biomechanics and robotics research as an indicator of how close the system is to tipping over the stance foot. However, the analytical validity of the XCoM and MOS is circumscribed to the LIP reduced-order model with point or flat-foot contact, hence excluding the angular momentum effect and typically resulting in conservative balanced regions as compared to the full-body balance capabilities of a biped system (Krause et al., 2012).
Characterizing the full balance capabilities in the form of a region of dynamic balance for general biped systems and foot models is therefore an open research question, relevant to the stability analysis of human gait and posture, as well as to the quantification of balance performance in biped robots and exoskeletons (Mummolo et al., 2018a; Mummolo et al., 2018b; Torricelli et al., 2020; Pinto-Fernandez et al., 2020). A novel general framework for benchmarking the balance capabilities of biped systems is proposed in this study, by characterizing a system’s balanced region in the COM state space. This framework is of general applicability, from reduced-order to whole-body models, and specifically introduces a method for taking into consideration the complex contact interaction of a multi-segment foot model and the ground. The limits of dynamic balance are numerically evaluated in this study by the Boundary of Balance (BoB) in the COM state space, which is the set of maximum allowable velocity perturbations of the system’s COM along a given direction (Mummolo et al., 2017). Balance indicators are formulated in the state space as novel metrics to characterize the region of balance identified by the BoB. The nature of quantification of the BoB and associated balance indicators allows for direct comparison with the existing XCoM/MOS balance assessment, revisited in this study through a graphical interpretation in the state space. An extended MOS formulation is proposed for the case of higher-order biped systems. The proposed general framework is demonstrated for a human-like standing posture model. Results for the balanced regions of the whole-body biped model (with and without segmented feet) and its equivalent LIP model are compared to quantify the effects of a multi-segment foot structure and the higher-order dynamics on the human-like balance capabilities during standing posture. The results demonstrate the extent of the validity of existing stability metrics and the gaps filled by the proposed benchmarking framework.
A biped model is formulated in the sagittal plane as a planar representation of the human body in the double-stance upright posture. The whole-body model includes lower and upper body segments and multi-segment feet. The equivalent point-mass LIP model is also described.
A human-like biped is modeled with a six-link planar mechanism with five revolute joints (Figure 1). The links’ rigid motion is described by the attached link local frames; each local z-axis points out of the (X, Y) sagittal plane and represents the joint axis of rotation, according to the Denavit–Hartenberg convention (Fu et al., 1987). The mechanism has a floating base structure that allows the system to freely move in the sagittal plane without any specified foot point fixed to the ground. With this structure, any foot model can be implemented to make various contacts with the ground. The system’s floating base is the thigh local frame, located at the hip joint and connected to the origin of the global reference frame {O, X, Y} through three degrees-of-freedom (DOF) representing the unconstrained in-plane translations and rotation of the thigh link. Therefore, the total number of DOF for the floating-base legged system is eight, i.e., three global DOF and five revolute joints (q1–q5).
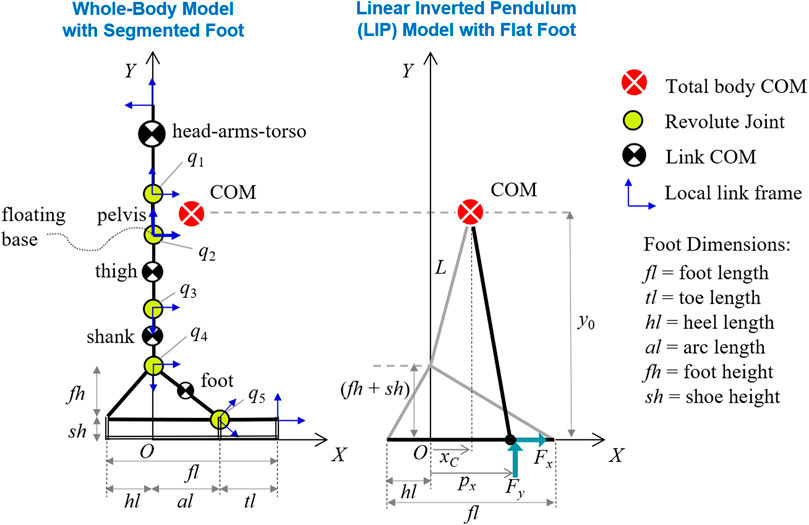
FIGURE 1. (left) Whole-body biped model with a segmented foot for standing posture in the sagittal plane. The joint variables qi (i = 1–5) represent torso, hip, knee, ankle, and metatarsal joint rotations. (right) Equivalent LIP model with constant COM height y0 and a rigid foot in flat contact with the ground. Normal and tangential components of the resultant ground reaction force are shown acting at the center of pressure px. Adapted by permission from Springer Nature Customer Service Centre GmbH: Springer eBook, Limits of Dynamic Postural Stability with a Segmented Foot Model. In: Lecture Notes in Computational Vision and Biomechanics, Mummolo C., and Vicentini G. (2020).
In the upper body branch, the head, arms, and torso are combined into a single body segment connected to the hip by a torso joint and a massless pelvis segment (Figure 1). The arms’ mass distribution is considered, but they are assumed fixed with the upper body segment. The lower body branch is an equivalent single-chain mechanism that describes the symmetric dynamics of left and right legs [leg symmetry is a common assumption for balancing tasks in the sagittal plane (Yang et al., 2007; Ozawa and Ishizaki, 2012)]. Link mass for thigh, shank, and foot segments includes the values for both legs. Lower-body joints are modeled with a single revolute joint for hip, knee, ankle, and toe motion, respectively, with rotation and actuation limits equivalent to those of two joints in parallel. In particular, the model’s hip, knee, ankle, and toe joint strengths (i.e., maximum torques) are twice those of a reference human subject, since they represent the strength of right and left joints in parallel.
The model symmetry implies that left and right reaction forces from the ground are equal. The total (left and right) ground reaction forces and moments distributed over the foot and toe segments are modeled through one equivalent resultant force applied at the system’s time-varying COP, to mimic heel-to-toe ground pressure distribution. The legged system’s centroidal dynamics is formulated as follows:
where m is the whole-body mass, g is the gravitational constant, xC and yC and their second time derivatives are the COM global coordinates and accelerations, respectively,
Given the whole-body kinematics of the legged system, the resultant ground reaction force and its point of application can be calculated from the above equilibrium equations. Specifically, the instantaneous COP position relative to the global frame {O, X, Y} is calculated from the whole-body kinematics as follows:
where py = 0 indicates that the COP is at the ground level. At any given time instant, the global COP coordinate px(t) must exist within the current contact region established between the foot segments and the ground. According to the segmented foot configuration, the contact region may not be constant and can be defined by its time-varying lower (LL) and upper (UL) limits, imposed on the COP:
The novel formulation of the time-varying COP limits is presented in the next section.
Lastly, the resultant normal and tangential forces exerted by the ground are constrained at all times by the following unilateral and friction cone constraints, with coefficient of static friction μ:
In addition to the constrained centroidal dynamics described above, the joint-space equations of motion for the 8-DOF floating-base legged system are also formulated, along with the associated joint angle and torque limits. The whole-body legged mechanism and its complete floating-base dynamics in the joint- and COM-space can be generalized to higher- or reduced-order models and extended to other types of single or double stances (Mummolo et al., 2018a).
The proposed legged mechanism includes a segmented foot model representative of a double stance with two parallel feet (Mummolo and Vicentini, 2020). The right and left feet motion and forces are symmetric in this foot model. The metatarsal joint connects two rigid links: a triangular element for the main foot body and a thin massless rod for the toe. Each foot segment has a rigid sole of thickness approximately equal to a shoe height (Figure 1). The validity of the rigid body assumption in a segmented foot model has been evaluated (Okita et al., 2009).
The segmented foot can establish multiple contact configurations with the ground, depending on the current values of foot (θ1) and toe (θ2) angles (Figure 2). With two links and three possible contact points, the foot has a total of eight possible modes of interaction with the ground. Three modes are excluded in this analysis: mode 3, given that a toe-tip contact is infeasible for average metatarsal toe strength; mode 6 (a no-contact mode) is out of the scope of this work; and mode 8 (i.e., any foot configuration for which
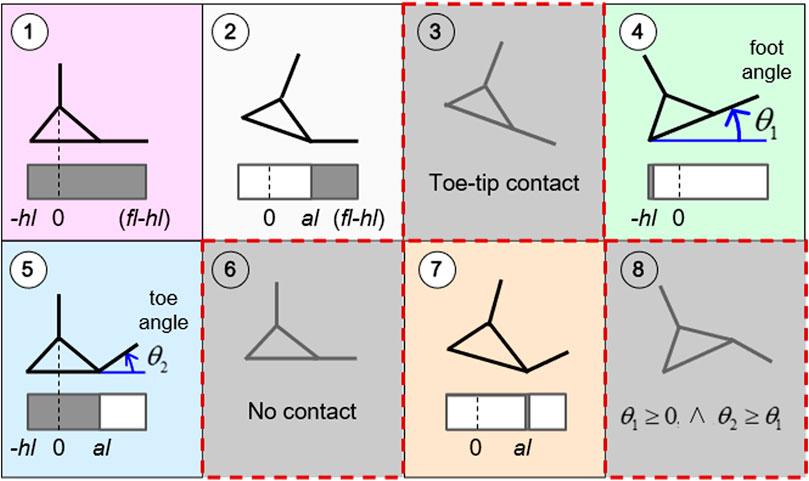
FIGURE 2. Multimodal foot-ground interaction and associated contact regions. Contact modes 3 and 8 are considered infeasible, while mode 6 (no contact) is out of the scope of this analysis. The foot and toe angles and the limits of contact regions are expressed relative to the global reference frame. The indicated foot parameters are: fl = foot length, hl = heel length, al = arc length. Adapted by permission from Springer Nature Customer Service Centre GmbH: Springer eBook, Limits of Dynamic Postural Stability with a Segmented Foot Model. In: Lecture Notes in Computational Vision and Biomechanics, Mummolo C., and Vicentini G. (2020).
A diagram of contact modes can be represented in the (θ1, θ2) plane (Figure 3). The feasible range of the foot angle θ1 is arbitrarily large,
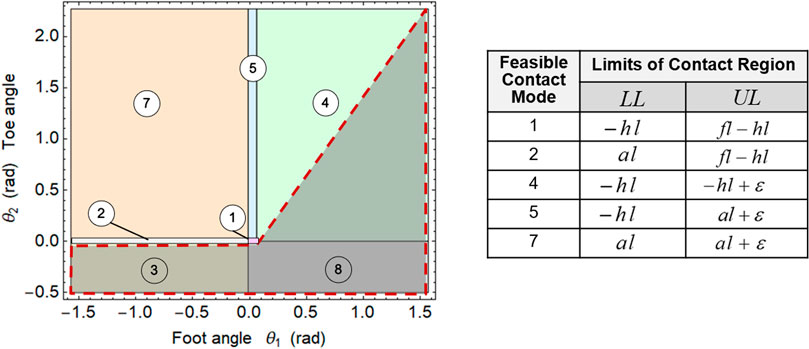
FIGURE 3. (Left) Diagram of contact modes. Solid borders indicate the discrete transitions between feasible modes. Infeasible contact modes are shaded by the gray area with the dashed border. (Right) The piece-wise constant COP limits associated with each feasible contact mode are indicated with respect to the global reference frame. Reprinted by permission from Springer Nature Customer Service Centre GmbH: Springer eBook, Limits of Dynamic Postural Stability with a Segmented Foot Model. In: Lecture Notes in Computational Vision and Biomechanics, Mummolo C., and Vicentini G. (2020).
A continuous model for contact mode transition is proposed, in which the mode-dependent limits of the contact region are formulated as nonlinear continuous and differentiable functions in the (θ1, θ2) plane. The discrete transition between the piece-wise constant COP limits is approximated by two surface functions,
In this work, the lower and upper COP limits consist of two modified step functions in two dimensions (Figure 4), created by adding ellipsoidal volumes to the horizontal surfaces corresponding to the piece-wise constant COP limits within each contact mode:
where
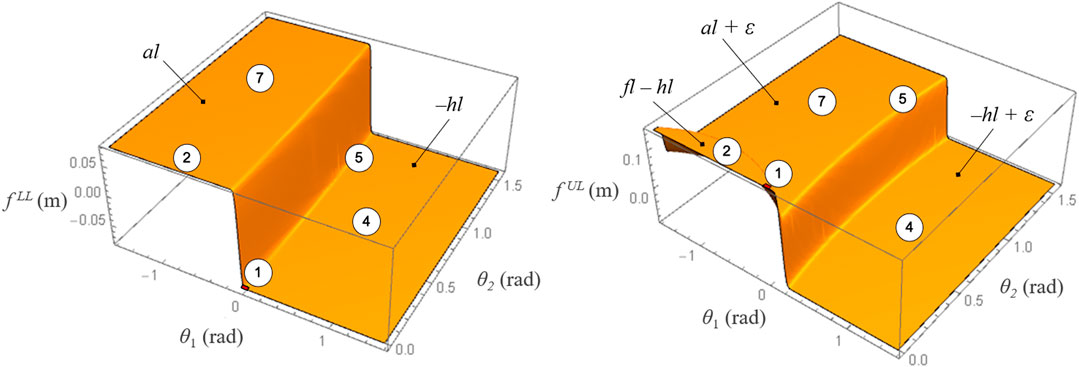
FIGURE 4. Surface functions approximating the lower and upper COP limits in the feasible contact modes 1, 2, 4, 5, and 7. Reprinted by permission from Springer Nature Customer Service Centre GmbH: Springer eBook, Limits of Dynamic Postural Stability with a Segmented Foot Model. In: Lecture Notes in Computational Vision and Biomechanics, Mummolo C., and Vicentini G. (2020).
The proposed surface functions map foot kinematics (i.e., contact modes) into relevant foot dynamic information (i.e., COP limits), which have direct effect on the overall system’s joint and centroidal dynamics. The multimodal contact interaction provides physically consistent constraints on the COP position that automatically adjust to the current stance foot configuration and corresponding contact region. This novel approach is most useful when implemented in any trajectory optimization problem in which the sequence of contact modes is unspecified a priori. With this model, the optimal solution can explore complex foot-ground interactions, as opposed to satisfying user-specified fixed contacts, while ensuring that the generated optimal trajectories are dynamically feasible. In this work, the proposed contact model allows the optimization to naturally discover various balancing motions that exploit heel-to-toe rocking and partial foot contact while recovering from perturbations during standing.
An equivalent reduced-order model of the proposed biped system is formulated to compare the balance capabilities of point-mass vs. multi-mass models. The biped standing posture is modeled with a footed LIP (Dafarra et al., 2016; Wang et al., 2016), which has a point mass representing the system’s COM and a massless, rigid triangular foot with finite length and height (Figure 1; right). The dynamics of the LIP is linear due to the small angle approximation of the inverted pendulum and the imposed condition that the foot always remains in fixed flat contact with the ground (i.e., mode 1). These assumptions yield a constant COM height during the entire LIP’s trajectory. In classical biomechanical analysis of standing posture, the COM height of the LIP model is approximated with an effective leg length L measured from the ankle joint to the COM of the human subject in the upright standing configuration (Hof et al., 2005; Winter 1995), hence neglecting the moment that the friction force exerts about the ankle joint in presence of a finite foot height. In this study, the leg, ankle, and finite-sized foot are treated as a single structural member with the COM at one end and an unactuated hinge joint at the COP, where the ground reaction force is applied (Figure 1). This puts the focus on the effective moment arm created by the relative COM and COP positions and the forces at each end of the arm (Terry et al., 2014). Therefore, the constant COM height in the current LIP model with finite-sized foot is
The LIP motion in the X direction is governed by the following second-order differential equation:
where
The same unilateral and friction constraints imposed on the whole-body model apply to the reduced-order model. The normal reaction force in the LIP strictly satisfies the unilateral constraint by always being positive (Fy = mg). The limits imposed by the friction cone constraints on the LIP model can be translated into limits of maximum COM displacement in the positive,
where,
The dynamics of the whole-body biped system and its equivalent LIP model allows for the illustration and comparison of their respective stability criteria. In this work, the stability of biped systems is intended in the sense of balance (i.e., balance stability), which can be defined from dynamic system perspectives as the ability to maintain the state of a dynamic system inside a defined desired region of the state space (Pratt et al., 2017). From this perspective, a revised illustration of two existing methods for quantifying the dynamic balance capabilities of biped systems is proposed: the Boundary of Balance (BoB) and the limits of the Extrapolated COM (XCoM). Both approaches result in balance stability criteria formulated in the COM state space, based on which the novel systematic characterization of the limits of dynamic balance is proposed in this work. The terminology “dynamic balance” refers to the quantifiable ability of maintaining standing balance in presence of large perturbations, for which the ground projection of the COM exits the foot contact region (Mummolo and Kim, 2013a).
The Boundary of Balance is a general approach recently introduced that uses nonlinear optimization for the numerical construction of a balance threshold in the state space of biped systems (Mummolo et al., 2017). This construction method can be applied to any generic biped system, provided that the biped’s constrained dynamics in the joint and COM space are properly formulated. In this work, the balance threshold is obtained for the abovementioned whole-body biped and LIP, in order to demonstrate the regions of balance of two different standing posture models. However, the numerical construction method of a balance threshold can be applied to various biped systems, in single- and multi-contact scenarios, as shown in previous works (Mummolo et al., 2017; Mummolo et al., 2018a).
Balanced Region: To maintain balance, the biped’s state must stay within a defined desired region of the state space, herein called balanced region. In both human and robot balance, the goals, intentions, and constraints of the biped system must be taken into account when determining which states are considered balanced states and which states are not (Pratt et al., 2017). In this context, a definition of a balanced region was proposed by Mummolo et al., in which 1) the biped’s goal is to reach a static configuration where no body parts other than the feet are in contact with the ground and 2) the biped’s intention is to preserve its feet placement, while trying to achieve its goal (Mummolo et al., 2017). According to this definition, the balanced region of a biped system is the set of all possible initial conditions from which the system can reach an upright (i.e., not fallen) rest state, while avoiding a change in foot stance (Mummolo et al., 2017). For any initial conditions located within the balanced region, there exists at least one controlled trajectory that leads the biped safely to a desired rest state (i.e., upright posture), without ever changing its stance. In this case, the viable initial conditions represent a balanced state. If the biped in a given stance has initial conditions outside of the balanced region, due to external or self-induced (internal) perturbations, there is no controlled trajectory that allows recovery while in the original stance. In this case, the system is said to be in an unbalanced state and must change its contact configuration (e.g., take a step) or receive a stabilizing external impulse (e.g., push off of a wall) in order to avoid a fall.
Boundary of Balance: The balanced region is identified by its boundary (i.e., the set of extreme viable initial conditions), called the Boundary of Balance (BoB), using an optimization-based algorithm. The BoB represents the maximum limits of recovery for a legged system, quantified in terms of the system’s maximum allowable velocity perturbations during a given stance. Due to the high dimensionality of a whole-body model, the BoB is calculated in the state space of the COM Cartesian position and velocity.
A COM state located within the BoB is the necessary condition for dynamic balance in a generic biped model; in practice, the biped’s actual attainment of upright balance depends also on the specific controller implemented in the system, which must generate proper joint- and COM-level control such that the necessary state-space condition is always satisfied (Mummolo et al., 2017).
The BoB construction algorithm can be applied to generic whole-body as well as reduced-order biped models in various contact configurations between the system and the environment. For a given biped system, the BoB is contact- (or stance-) dependent and can be generally calculated for any type of contact configuration, provided that the relative contact model can be implemented when solving for the system’s constrained dynamics. In this analysis focused on postural stability, the BoB is constructed for the double stance configuration of the biped model in the sagittal plane, enhanced by the multimodal contact interaction of the proposed segmented foot.
Optimization-Based Construction Algorithm: A series of constrained numerical optimization problems is formulated to find the biped system’s BoB and the corresponding optimal joint and actuator torques’ trajectories driving the system from its maximum limits of recovery to a rest state. Joint-space and COM-space dynamics are used to formulate joint torques, COM motion, ground reaction forces, and COP position, as functions of the kinematic variables to be optimized (i.e., q1–q5 and the floating base rotation and translation). Each point of the BoB is constructed iteratively by generating a series of constrained balancing trajectories, where the model starts from various sampled initial COM positions and corresponding extreme initial velocity. For each sampled initial COM position, the initial COM velocity is minimized and maximized along a desired direction, while generating a balancing trajectory that satisfies 1) a final rest state (e.g., upright static posture), 2) various system and physics constraints, and 3) the preservation of the original stance. Each trajectory generation is formulated as a constrained nonlinear programming problem, solved with the method of sequential quadratic programming. Details of the numerical optimization algorithm can be found in previous work (Mummolo et al., 2018a). In this study, the maximum limits of recovery in the anterior-posterior direction are analyzed; hence, the initial COM velocity in the X direction is minimized and maximized for every sampled position to form the lower and upper segments of the BoB, respectively. Therefore, the BoB quantifying the biped’s postural balance capabilities in the sagittal plane can be written as the following set:
where
Constraints for Dynamic Balance: The joint and COM dynamics resulting from the above trajectory optimizations are subject to several constraints, to ensure that the balancing motions of the biped model with segmented feet are human-like and physically consistent. In this study, the following constraints are applied in the calculation of the biped’s BoB during the standing posture:
Upper and lower body joints are subject to anatomical ranges of motion. In addition, a kinematic constraint coupling torso and hip joint angles,
The infeasible contact modes are excluded: limits on the range of θ2 forbid mode 3 and 8 (Figure 3); the infeasible region of mode 4 is excluded by
Kinematic constraints at the initial and final times are imposed to satisfy the BoB balance condition: 1) in each optimization problem the velocity extrema are evaluated at a different COM position
Force and torque constraints: upper and lower body joints are subject to anthropometric torque limits. Contact-related constraints include the positive normal ground reaction force, friction cone, and the COP limits
Based on the LIP dynamics, the concept of the XCoM has been introduced to formulate a criterion for the dynamic balance of the reduced-order system (Hof et al., 2005). The XCoM formulation combines the COM position and velocity as follows:
where
A COM state such that the XCoM is within the foot limits represents the necessary condition for dynamic balance in a LIP system; in practice, the LIP can actually attain the upright balance only if the COP can be controlled fast enough within the foot limits to always be in front (or behind) of the XCoM, in order to decelerate the COM from its initial positive (or negative) velocity (Terry et al., 2014).
The XCoM balance criterion can be easily represented in the COM state space (Figure 5), as follows:
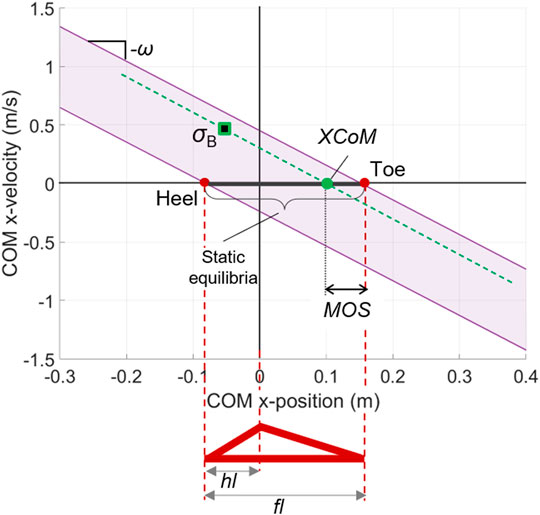
FIGURE 5. Balanced region in the state space of the LIP model with finite-sized flat foot. An example of a balanced state
The above linear velocity limits quantify the maximum allowable velocity perturbation for the LIP system and are analogous to the BoB analytically calculated for the reduced-order model of the biped system. Similarly, the state-space region enclosed by these limits is the balanced region of a LIP model with finite-sized foot and provides a useful graphical representation of the balance capabilities of the system (Figure 5). A LIP balanced state
As seen from their respective formulations above, both the BoB and the limits of the XCoM represent two analogous velocity-based criteria in the COM state space of a biped system; surpassing these thresholds results in an unbalanced COM state, for which a stabilizing external impulse is required (e.g., stepping). Despite having different construction approaches (numerical vs. analytical) and different applicability (whole-body with generic foot support vs. LIP with rigid flat foot), both balance stability criteria result into analogous balanced regions in the state space and are therefore directly comparable. If the BoB (Eq. 13) is projected onto the
Characteristic direction Ω: The dynamics of the LIP with finite-sized foot can be rewritten as follows:
with state
Reachable margin ΔR: The reachable margin quantifies the difference between the maximum position that a COM balanced state can reach with zero velocity and the edge of the stance foot. In other words, ΔR is the maximum displacement relative to the foot size at which the COM is still able to invert its motion (hence, zero velocity) by using only its internal actuator torques, COP control, and inertial effects (i.e., without any external impulse). Its biomechanical interpretation is similar to a maximum voluntary COM sway (Warnica et al., 2014), but calculated outside of the foot size to capture the dynamic ability of sway control: it measures how far the body can displace its COM outside of the footprint and come back to upright equilibrium, while standing and without any external help. For a LIP system, the reachable margin is the difference between the maximum XCoM excursion (i.e., maximum COM position with zero velocity) and the foot size; thus,
The viable margin ΔV: The viable margin is the difference between the maximum position for a COM balanced state and the edge of the stance foot. In other words, ΔV is the limiting COM displacement relative to the foot size for which there exists a set of initial velocities that allow the system to recover the upright equilibrium enabled only by its initial conditions and internal actuator torques and COP control. Differently from the reachable margin, not all states within the viable margin can be reached by the COM voluntary sway in the given stance: the initial conditions placing the system’s COM state within its viable margin, but outside of the reachable margin, must be externally imposed, for instance, by external pushes. However, once the COM state is inside the balanced region (i.e., viable), the external help can cease and the system in the given stance can recover balance by means of its internal actuation capacity. The viable margin quantifies the overall dimensions of the balanced region in the X direction. For the LIP system the only constraint limiting this dimension is the friction constrains, hence
The BoB is evaluated for the proposed planar biped model to quantify the human-like limits of dynamic balance during standing posture. The biped represents a human subject of total mass m = 56.7 kg and approximately 1.6 m tall. Anthropomorphic link length, mass, and foot parameters (Winter 1991; Mummolo et al., 2013b) and joint angle (Chao et al., 1983; Wojcik et al., 2001) and torque limits parameters (Anderson et al., 2007; Stockdale, 2011) of a reference human subject are adapted from the literature. In particular, the dimensions of the foot model are: fl = 0.23, hl = 0.081, al = 0.078, tl = 0.074, fh = 0.093, and sh = 0.03, all in meters. The proposed limits of dynamic balance and associated balance indicators are calculated for the characterization of the balanced regions of the whole-body biped model in two foot-support conditions (segmented and flat-foot) and for the LIP model with rigid flat foot. The regions of balance resulting for each model can be consistently analyzed and directly compared in the state space, to gain insights on how modeling choices affect the balance capabilities of bipedal standing posture.
The algorithm for the numerical construction of the BoB calculates each point of the boundary as the initial conditions of a constrained balancing trajectory starting from sampled COM positions (
The BoB results and the enclosed set of balanced states are projected in the (
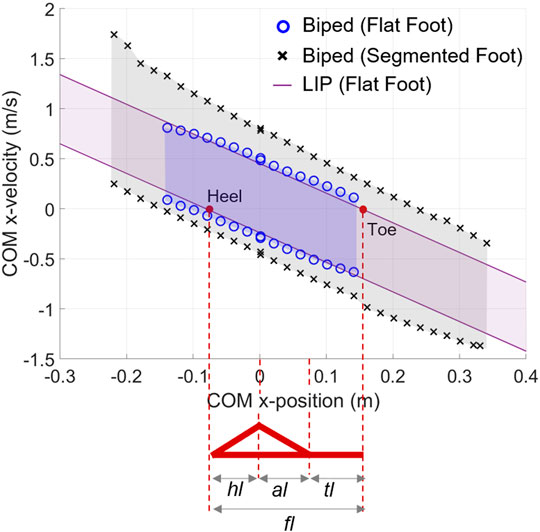
FIGURE 6. BoB of the whole-body posture model in two conditions of foot support: flat-foot (circles) and multimodal (x). The BoB results are projected onto the
The proposed segmented foot and contact models enable the heel-to-toe rocking balancing strategy, in addition to the traditional ankle, hip, and upper body strategies, which results in a larger set of balanced states as compared to the case of flat-foot contact (Figure 6). With a spacing of 2 cm for the samples
As illustration, trajectories of the whole-body model, with and without segmented feet, balancing from a point of the BoB are presented (Figure 7). As previously observed, the maximum allowable velocity extrema in the anterior/posterior directions are greater when the heel-to-toe rocking strategy is enabled (+0.802/–0.461 m/s), as compared to the case of flat feet (i.e., mode 1; +0.484/–0.292 m/s). When balancing in the multimodal foot support, the segmented foot follows a contact mode sequence that was not specified beforehand, but it is discovered by the optimization solution. From the balancing animations it can be observed that in addition to the foot rocking strategy, the segmented foot model in multimodal contact interaction also leads to an increased use of knee flexion and hip strategy during recovery from both positive and negative velocity perturbations, while the knee joint motion is rather stiff when the foot is constrained to be flat. As a result, the type of foot support influences the amount of COM vertical displacement used in the balancing motion, which is very limited in the case of flat foot. This further explains why the constant-height LIP can better approximate the limits of dynamic balance of the biped standing on flat-foot support (Figure 6), while a model with variable COM height (Koolen et al., 2016b) should be considered instead for a more accurate quantification of the human-like balance capabilities with a segmented foot.
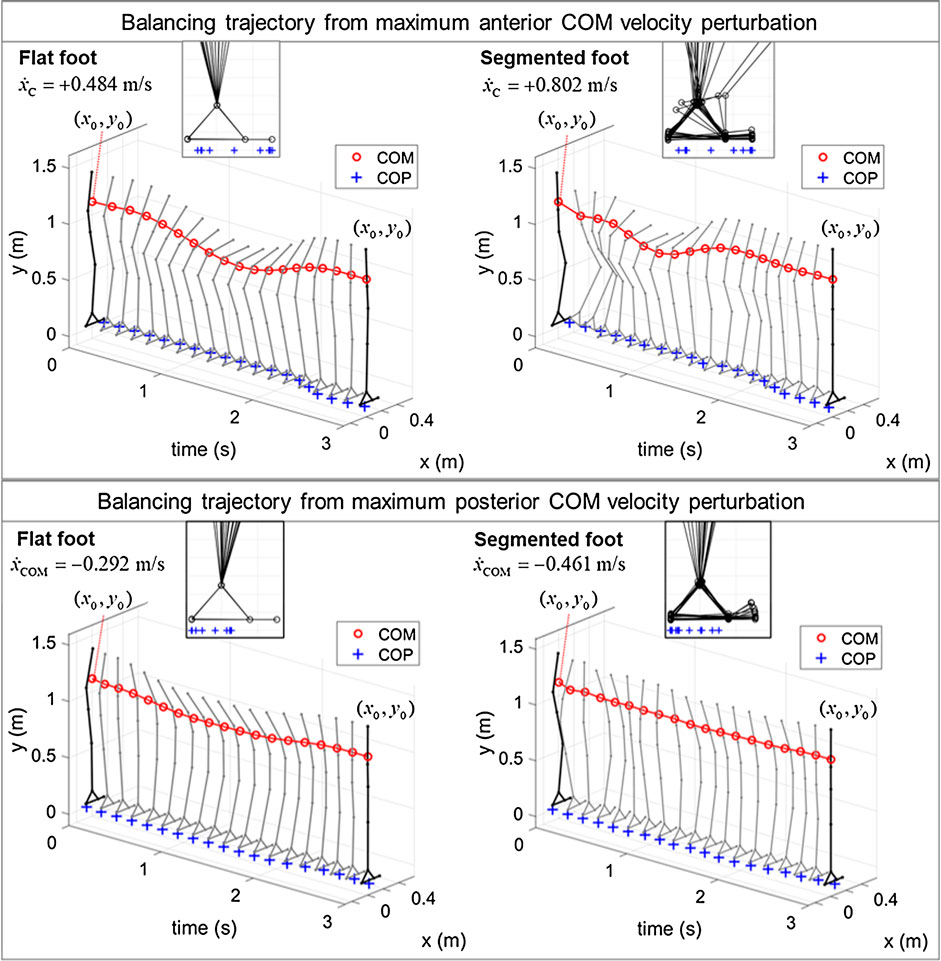
FIGURE 7. Results of COP (+) and COM (o), and whole-body balancing trajectories, recovering from maximum positive and negative COM X-velocity perturbations from an upright standing posture. Reprinted by permission from Springer Nature Customer Service Centre GmbH: Springer eBook, Limits of Dynamic Postural Stability with a Segmented Foot Model. In: Lecture Notes in Computational Vision and Biomechanics, Mummolo C., and Vicentini G. (2020).
The novel balance indicators are calculated for the characterization of the balanced region for the whole-body biped model in the two foot conditions and for the LIP model with rigid flat foot (Table 1). The BoB upper and lower segments were fitted by the following linear models (Figure 8): y = –2.59x + 0.49 and y = –2.65x – 0.28 (for the upper and lower velocity limits, respectively, in the flat-foot condition); y = –3.53x + 0.83 and y = –3.01x – 0.45 (for the upper and lower velocity limits, respectively, in the segmented foot condition); all fitted lines are in m/s and resulted in R2 > 0.99.
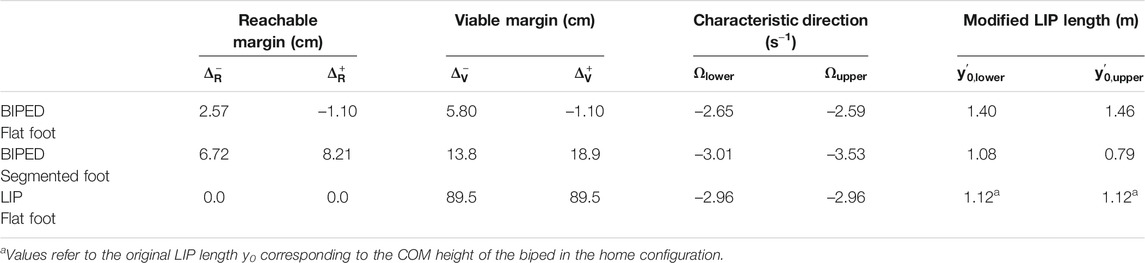
TABLE 1. Balance indicators for the state-space characterization of the balanced regions.
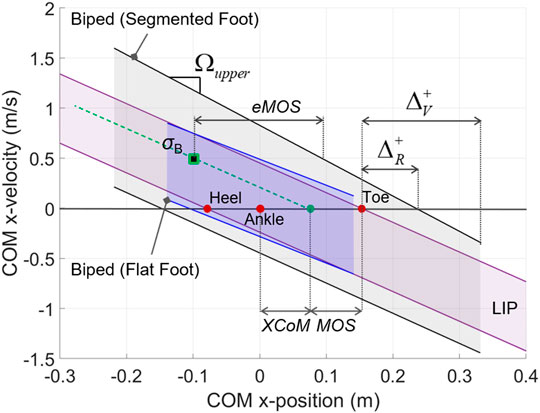
FIGURE 8. State-space characterization of balanced regions: whole-body with flat and segmented foot vs. LIP.
The reachable and viable margins are indicators of the dynamic characteristics of postural balance, by capturing how far the COM can extend beyond the foot support limits in the anterior and posterior directions (indicated by a + or – superscript; Table 1). This aspect is rarely quantified during classical dynamic posturography in humans or robot balance assessment, mostly due to the use of reduced-order models in the traditional approaches. Both viable and reachable margins in presence of the multimodal foot-ground interaction are far greater than those obtained for the flat foot model, both in the anterior and posterior directions, quantifying the effect of the additional foot rocking balancing mechanism. When the COM position is at its reachable limit given by ΔR, the biped system still has the internal capability of generating the required stabilizing moment
Comparing the reachable and viable margins of the biped system with those of the equivalent LIP model, it is observed that the LIP does not accurately represent the limits of dynamic balance of the higher-order system. The LIP reachable margins underestimate the amount of COM anterior-posterior postural sway as compared to the reachable margins of the whole-body model, due to the absence of centroidal angular momentum in the reduced-order model; the only exception is for the biped’s
Lastly, the characteristic directions of the BoB upper (
The proposed balance indicators have provided a characterization of the state-space regions of balance for generic biped systems and allow to extend the existing stability metric MOS to a generalized formulation (eMOS), applicable to any biped model. The MOS and eMOS are calculated and compared for an example balanced state
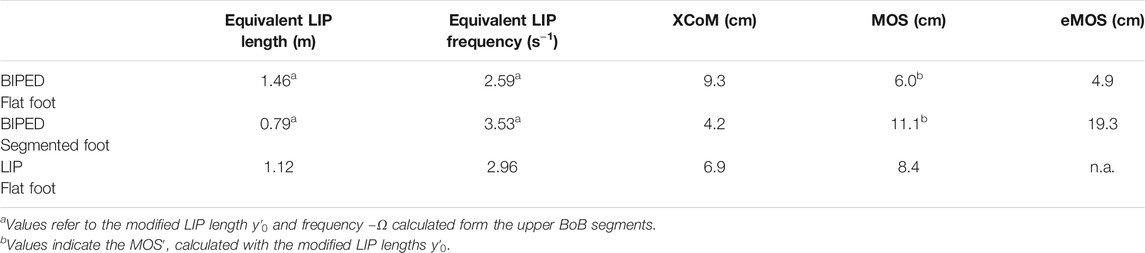
TABLE 2. Instantaneous margins of stability for equivalent LIP (MOS) and whole-body (eMOS) models for a COM state
This study proposed a general methodology for the characterization of balance capabilities of generic biped systems based on the concept of the Boundary of Balance. A novel segmented foot and contact model have been formulated to allow the unified treatment of multiple contact modes between the feet and the ground. This model is integrated in a human-like standing posture mechanism to study the maximum limits of recovery from various upright standing postures. Overall, the multimodal foot-ground contact schedule naturally arises from optimization results whenever the segmented foot is allowed the rocking motion; this additional balancing strategy leads to greater dynamic balance capabilities in the biped’s postural model, confirming the importance of replacing flat feet assumptions with a more human-like foot-toe complex. A graphical interpretation of the classical approaches (XCoM and MOS) in the state space has been illustrated and used as inspiration to formulate novel balance indicators that characterize the regions of balance in the state space. The extended MOS concept has been introduced to assess the level of instantaneous balance (or imbalance) of a given COM state for whole-biped systems. The reachable and viable margins quantify the rejection capability against internal and external perturbations, respectively, for the given human in a standing posture. These results are an essential reference when benchmarking human postural control and its deterioration due to aging or movement disorders. Furthermore, the proposed state-space characterization provides an essential benchmarking framework to identify and quantify the differences in the balance capabilities of various reduced- and higher-order legged systems. This framework of quantification, in addition to the formulation of multimodal foot contact interactions with the environment, provides important insights into the extent of validity of existing techniques; additionally, this methodology could lead to new approaches for establishing improved reduced-order models with balance characteristics that best match those of the full-order biped systems, which is crucially important for the design of dynamically balanced robots.
The raw data supporting the conclusions of this article can be made available by the authors, upon request.
CM developed the theory and the computational framework for the balance benchmark, led the modeling, coding, and analysis, and supervised the overall research. KA processed and analyzed the data. GC helped the modeling and analysis and contributed to supervising the research. All the authors contributed to the discussion, writing, review, and editing of the article.
Funded by the Newark College of Engineering of the New Jersey Institute of Technology.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The authors thank Karen Ayoub for her help in running the numerical results and Giulia Vicentini for her contribution in developing the whole-body biped and segmented foot model.
Agarwal, S., and Popovic, M. (2018). “Study of toe joints to enhance locomotion of humanoid robots”, in IEEE-RAS 18th international conference on humanoid robots (humanoids), IEEE, 1039–1044.
Anderson, D. E., Madigan, M. L., and Nussbaum, M. A. (2007). Maximum voluntary joint torque as a function of joint angle and angular velocity: model development and application to the lower limb. J. Biomech. 40 (14), 3105–3113. doi:10.1016/j.jbiomech.2007.03.022
Boström, K. J., Dirksen, T., Zentgraf, K., and Wagner, H. (2018). The contribution of upper body movements to dynamic balance regulation during challenged locomotion. Front. Hum. Neurosci. 12, 8. doi:10.3389/fnhum.2018.00008
Bruijn, S. M., and van Dieën, J. H. (2018). Control of human gait stability through foot placement. J. R. Soc. Interface 15 (143), 816. doi:10.1098/rsif.2017.0816
Burnfield, M. (2010). Gait analysis: normal and pathological function. J. Sports Sci. Med. 9 (2), 353. doi:10.1016/j.csm.2010.03.013
Chao, E. Y., Laughman, R. K., Schneider, E., and Stauffer, R. N. (1983). Normative data of knee joint motion and ground reaction forces in adult level walking. J. Biomech. 16 (3), 219–233. doi:10.1016/0021-9290(83)90129-x
Cho, B.-K., and Kim, J.-Y. (2018). Dynamic posture stabilization of a biped robot SUBO-1 on slope-changing grounds. Int. J. Precis. Eng. Manuf. 19 (7), 1003–1009. doi:10.1007/s12541-018-0118-8
Collins, S. H., and Kuo, A. D. (2010). Recycling energy to restore impaired ankle function during human walking. PloS One 5 (2), e9307. doi:10.1371/journal.pone.0009307
Dafarra, S., Romano, F., and Nori, F. (2016). “Torque-controlled stepping-strategy push recovery: design and implementation on the iCub humanoid robot”, in IEEE-RAS 16th international conference on humanoid robots (humanoids), IEEE, 152–157.
Deschamps, K., Staes, F., Roosen, P., Nobels, F., Desloovere, K., Bruyninckx, H., et al. (2011). Body of evidence supporting the clinical use of 3D multisegment foot models: a systematic review. Gait Posture 33 (3), 338–349. doi:10.1016/j.gaitpost.2010.12.018
Elhasairi, A., and Pechev, A. (2015). Humanoid robot balance control using the spherical inverted pendulum mode. Front. Robo. Al. 2, 21.
Englsberger, J., Ott, C., and Albu-Schäffer, A. (2015). Three-dimensional bipedal walking control based on divergent component of motion. IEEE Trans. Robot. 31 (2), 355–368. doi:10.1109/tro.2015.2405592
Englsberger, J., and Ott, C. (2012). “Integration of vertical com motion and angular momentum in an extended capture point tracking controller for bipedal walking”, in 2012 12th IEEE-RAS international conference on humanoid robots (humanoids 2012), IEEE, 183–189.
Englsberger, J., Ott, C., Roa, M. A., Albu-Schäffer, A., and Hirzinger, G. (2011). “Bipedal walking control based on capture point dynamics”, in IEEE/RSJ international conference on intelligent robots and systems, IEEE, 4420–4427.
Farizeh, T., and Sadigh, M. J. (2014). “Effect of heel to toe walking on time optimal walking of a biped during single support phase-V003T03A054”, in ASME 2014 international mechanical engineering congress and exposition. New York: American Society of Mechanical Engineers. doi:10.1115/IMECE2014-38214
Fu, K. S., Gonzalez, R., and Lee, C. G. (1987). Robotics: control sensing. New York: Tata McGraw-Hill Education.
Germanotta, M., Mileti, I., Conforti, I., Del Prete, Z., Aprile, I., and Palermo, E. (2021). Estimation of human center of mass position through the inertial sensors-based methods in postural tasks: an accuracy evaluation. Sensors 21 (2), 601.
Goswami, A. (1999). Postural stability of biped robots and the foot-rotation indicator (FRI) point. Int. J. Robot Res. 18 (6), 523–533. doi:10.1177/02783649922066376
Griffin, R. J., Wiedebach, G., Bertrand, S., Leonessa, A., and Pratt, J. (2018). “Straight-leg walking through underconstrained whole-body control”, in IEEE international conference on robotics and automation (ICRA), IEEE, 1–5.
Herr, H., and Popovic, M. (2008). Angular momentum in human walking. J. Exp. Biol. 211 (4), 467–481. doi:10.1242/jeb.008573
Hinata, R., and Nenchev, D. N. (2018). “Balance stabilization with angular momentum damping derived from the reaction null-space”, in IEEE-RAS 18th international conference on humanoid robots (humanoids), IEEE, 188–195.
Hof, A. L., Gazendam, M. G., and Sinke, W. E. (2005). The condition for dynamic stability. J. Biomech. 38 (1), 1–8. doi:10.1016/j.jbiomech.2004.03.025
Huang, Y., Wang, Q.-N., Gao, Y., and Xie, G.-M. (2012). Modeling and analysis of passive dynamic bipedal walking with segmented feet and compliant joints. Acta Mech. Sin. 28 (5), 1457–1465. doi:10.1007/s10409-012-0079-6
Hughes, J., Clark, P., and Klenerman, L. (1990). The importance of the toes in walking. J Bone Joint Surg Br 72 (2), 245–251. doi:10.1302/0301-620x.72b2.2312564
Ivanenko, Y. P., Levik, Y. S., Talis, V. L., and Gurfinkel, V. S. (1997). Human equilibrium on unstable support: the importance of feet-support interaction. Neurosci. Lett. 235 (3), 109–112. doi:10.1016/s0304-3940(97)00721-0
Kerrigan, D. C., Della Croce, U., Marciello, M., and Riley, P. O. (2000). A refined view of the determinants of gait: significance of heel rise. Arch. Phys. Med. Rehabil. 81 (8), 1077–1080. doi:10.1053/apmr.2000.6306
Kim, M., and Collins, S. H. (2015). Once-per-step control of ankle-foot prosthesis push-off work reduces effort associated with balance during walking. J. NeuroEng. Rehabil. 12 (1), 43. doi:10.1186/s12984-015-0027-3
Koolen, T., Bertrand, S., Thomas, G., De Boer, T., Wu, T., Smith, J., et al. (2016a). Design of a momentum-based control framework and application to the humanoid robot atlas. Int. J. Humanoid Rob. 13 (01), 1650007. doi:10.1142/s0219843616500079
Koolen, T., De Boer, T., Rebula, J., Goswami, A., and Pratt, J. (2012). Capturability-based analysis and control of legged locomotion, Part 1: theory and application to three simple gait models. Int. J. Robot Res. 31 (9), 1094–1113. doi:10.1177/0278364912452673
Koolen, T., Posa, M., and Tedrake, R. (2016b). “Balance control using center of mass height variation: limitations imposed by unilateral contact”, in IEEE-RAS 16th international conference on humanoid robots (humanoids), IEEE, 8–15.
Kouchaki, E., Wu, C. Q., and Sadigh, M. J. (2012). Effects of constraints on standing balance control of a biped with toe-joints. Int. J. Human. Rob. 09 (03), 1250016. doi:10.1142/s0219843612500168
Krause, M., Englsberger, J., Wieber, P.-B., and Ott, C. (2012). Stabilization of the capture point dynamics for bipedal walking based on model predictive control. IFAC Proc. Vol. 45 (22), 165–171. doi:10.3182/20120905-3-hr-2030.00165
Ku, P. X., Abu Osman, N. A., Yusof, A., and Wan Abas, W. A. (2012). The effect on human balance of standing with toe-extension. PloS One 7 (7), e41539. doi:10.1371/journal.pone.0041539
Lee, R. Y., and Wong, T. K. (2002). Relationship between the movements of the lumbar spine and hip. Hum. Mov. Sci. 21 (4), 481–494. doi:10.1016/s0167-9457(02)00117-3
Liu, C. C., Lee, T. T., Xiao, S. R., Lin, Y. C., Chou, Z. X., and Wong, C. C. (2019). Bipedal walking with push recovery balance control involves posture correction. Microsyst. Technol. 46, 1–12. doi:10.1177/0278364919835606
Maurer, C., and Peterka, R. J. (2005). A new interpretation of spontaneous sway measures based on a simple model of human postural control. J. Neurophysiol. 93 (1), 189–200. doi:10.1152/jn.00221.2004
Mesesan, G., Englsberger, J., Garofalo, G., Ott, C., and Albu-Schäffer, A. (2019). “Dynamic walking on compliant and uneven terrain using DCM and passivity-based whole-body control”, in IEEE-RAS 19th international conference on humanoid robots (humanoids), IEEE, 25–32.
Millard, M., McPhee, J., and Kubica, E. (2012). Foot placement and balance in 3D. J. Comput. Nonlinear Dyn. 7 (2), 462. doi:10.1115/1.4005462
Mizrahi, J., Solzi, P., Ring, H., and Nisell, R. (1989). Postural stability in stroke patients: vectorial expression of asymmetry, sway activity and relative sequence of reactive forces. Med. Biol. Eng. Comput. 27 (2), 181–190. doi:10.1007/BF02446228
Mummolo, C., Peng, W. Z., Gonzalez, C., and Kim, J. H. (2018a). Contact-dependent balance stability of biped robots. J. Mech. Robot. 10 (2), 978. doi:10.1115/1.4038978
Mummolo, C., Peng, W. Z., Agarwal, S., Griffin, R., Neuhaus, P. D., and Kim, J. H. (2018b). Stability of mina v2 for robot-assisted balance and locomotion. Front. Neurorobot. 12, 62. doi:10.3389/fnbot.2018.00062
Mummolo, C., and Kim, J. H. (2013a). Passive and dynamic gait measures for biped mechanism: formulation and simulation analysis. Robotica 31 (4), 555–572. doi:10.1017/s0263574712000586
Mummolo, C., Mangialardi, L., and Kim, J. H. (2013b). Quantifying dynamic characteristics of human walking for comprehensive gait cycle. J. Biomech. Eng. 135 (9), 91006. doi:10.1115/1.4024755
Mummolo, C., Mangialardi, L., and Kim, J. H. (2015). “Identification of balanced states for multi-segmental legged robots using reduced-order model”, in IEEE-RAS 15th international conference on humanoid robots (humanoids). IEEE, 914–919.
Mummolo, C., Mangialardi, L., and Kim, J. H. (2017). Numerical estimation of balanced and falling states for constrained legged systems. J. Nonlinear Sci. 27 (4), 1291–1323. doi:10.1007/s00332-016-9353-2
Mummolo, C., and Vicentini, G. (2020). “Limits of dynamic postural stability with a segmented foot model” in Computer methods, imaging and visualization in biomechanics and biomedical engineering. CMBBE 2019. Lecture Notes in computational vision and biomechanics. Editors G. Ateshian, K. Myers, and J. Tavares (Cham: Springer).
Murnaghan, C. D., Elston, B., Mackey, D. C., and Robinovitch, S. N. (2009). Modeling of postural stability borders during heel-toe rocking. Gait Posture 30 (2), 161–167. doi:10.1016/j.gaitpost.2009.03.010
Nishiwaki, K., Kagami, S., Kuniyoshi, Y., Inaba, M., and Inoue, H. (2002). “Toe joints that enhance bipedal and fullbody motion of humanoid robots” in Proceedings 2002 IEEE international conference on robotics and automation (IEEE), 3105–3110.
Nolan, L., and Kerrigan, D. C. (2004). Postural control: toe-standing versus heel-toe standing. Gait Posture 19 (1), 11–15. doi:10.1016/s0966-6362(03)00007-9
Okita, N., Meyers, S. A., Challis, J. H., and Sharkey, N. A. (2009). An objective evaluation of a segmented foot model. Gait Posture 30 (1), 27–34. doi:10.1016/j.gaitpost.2009.02.010
Ozawa, R., and Ishizaki, J. Y. (2012). “Passivity-based symmetric posture control and the effects of mass distribution and internal impedance on balance”, in 2012 12th IEEE-RAS international conference on humanoid robots (humanoids 2012). IEEE, 171–176.
Peng, W. Z., Mummolo, C., and Kim, J. H. (2020). “Stability criteria of balanced and steppable unbalanced states for full-body systems with implications in robotic and human gait”, in 2020 IEEE international conference on robotics and automation (ICRA), IEEE, 9789–9795.
Pickle, N. T., Wilken, J. M., Fey, N. P., and Silverman, A. K. (2018). A comparison of stability metrics based on inverted pendulum models for assessment of ramp walking. PloS One 13 (11), e0206875. doi:10.1371/journal.pone.0206875
Pinto-Fernandez, D., Torricelli, D., Sanchez-Villamanan, M. C., Mombaur, K., Conti, R., et al. (2020). Performance evaluation of lower limb exoskeletons: a systematic review. IEEE Trans. Neural Syst. Rehabilitation Eng. 28 (7), 1573–1583.
Pratt, J., Carff, J., Drakunov, S., and Goswami, A. (2006). “Capture point: a step toward humanoid push recovery”, in 2006 6th IEEE-RAS international conference on humanoid robots, IEEE, 200–207.
Pratt, J. E., and Drakunov, S. V. (2007). “Derivation and application of a conserved orbital energy for the inverted pendulum bipedal walking model”, in Proceedings 2007 IEEE international conference on robotics and automation, IEEE, 4653–4660.
Pratt, J., Ott, C., and Hyon, S. H. (2017). “Introduction to humanoid balance.” in Humanoid robotics: a reference. Editors A. Goswami and P. Vadakkepat. Dordrecht: Springer.
Sadedel, M., Yousefi-Koma, A., Khadiv, M., and Iranmanesh, F. (2018). Heel-strike and toe-off motions optimization for humanoid robots equipped with active toe joints. Robotica 36 (6), 925.
Sadeghi, H., Sadeghi, S., Prince, F., Allard, P., Labelle, H., and Vaughan, C. L. (2001). Functional roles of ankle and hip sagittal muscle moments in able-bodied gait. Clin. Biomech. 16 (8), 688–695. doi:10.1016/s0268-0033(01)00058-4
Seyde, T., Shrivastava, A., Englsberger, J., Bertrand, S., Pratt, J., and Griffin, R. J. (2018). “Inclusion of angular momentum during planning for capture point based walking”, in IEEE international conference on robotics and automation (ICRA), IEEE, 1791–1798.
Shafiee-Ashtiani, M., Yousefi-Koma, A., Mirjalili, R., Maleki, H., and Karimi, M. (2017). “Push recovery of a position-controlled humanoid robot based on capture point feedback control”, in 2017 5th RSI international conference on robotics and mechatronics (ICRoM), IEEE, 126–131.
Stockdale, A. A. (2011). Modeling three-dimensional hip and trunk peak torque as a function of joint angle and velocity.
Sugihara, T., and Yamamoto, T. (2017). “Foot-guided agile control of a biped robot through ZMP manipulation”, in IEEE/RSJ international conference on intelligent robots and systems (IROS), IEEE, 4546–4551.
Terry, K., Stanley, C., and Damiano, D. (2014). A new perspective on the walking margin of stability. J. Appl. Biomech. 30 (6), 737–741. doi:10.1123/jab.2014-0089
Torricelli, D., Gonzalez, J., Weckx, M., Jiménez-Fabián, R., Vanderborght, B., and Sartori, M. (2016). Human-like compliant locomotion: state of the art of robotic implementations. Bioinspir. Biomim. 11 (15), 051002.
Torricelli, D., Rodriguez-Guerrero, C., Veneman, J. F., Crea, S., Briem, K., et al. (2020). Benchmarking wearable robots: challenges and recommendations from functional, user experience, and methodological perspectives. Front. Robo. AI. 7, 168.
van Zutven, P., and Nijmeijer, H. (2013). Foot placement indicator for balance of planar bipeds with point feet. Int. J. Adv. Rob. Syst. 10 (5), 250. doi:10.5772/56523
Vukobratović, M., Herr, H. M., Borovac, B., Raković, M., Popovic, M., Hofmann, A., et al. (2008). Biological principles of control selection for a humanoid robot's dynamic balance preservation. Int. J. Humanoid Rob. 5 (04), 639–678. doi:10.3389/fnbot.2019.00036
Wang, P., Liu, G., Zha, F., Guo, W., Li, M., and Cai, H. (2016). A simple control algorithm for controlling biped dynamic walking with stopping ability based on the footed inverted pendulum model. Adv. Mech. Eng. 8 (9), 1687. doi:10.1177/1687814016670283
Warnica, M. J., Weaver, T. B., Prentice, S. D., and Laing, A. C. (2014). The influence of ankle muscle activation on postural sway during quiet stance. Gait Posture 39 (4), 1115–1121. doi:10.1016/j.gaitpost.2014.01.019
Wearing, S. C., Hooper, S. L., Dubois, P., Smeathers, J. E., and Dietze, A. (2014). Force-deformation properties of the human heel pad during barefoot walking. Med. Sci. Sports Exerc. 46 (8), 1588–1594. doi:10.1249/MSS.0000000000000281
Wensing, P. M., and Orin, D. E. (2016). Improved computation of the humanoid centroidal dynamics and application for whole-body control. Int. J. Humanoid Robot. 13 (1), 1550039.
Wight, D. L., Kubica, E. G., and Wang, D. W. (2008). Introduction of the foot placement estimator: a dynamic measure of balance for bipedal robotics. J. Comput. Nonlinear Dynam. 3 (1), 334. doi:10.1115/1.2815334
Winter, D. A. (1991). The biomechanics and motor control of human gait: normal. Elderly and pathological. 2a edn. Waterloo: Canadian Cataloguing in Publication Data.
Winter, D. (1995). Human balance and posture control during standing and walking. Gait Posture 3 (4), 193–214. doi:10.1016/0966-6362(96)82849-9
Wojcik, L. A., Thelen, D. G., Schultz, A. B., Ashton-Miller, J. A., and Alexander, N. B. (2001). Age and gender differences in peak lower extremity joint torques and ranges of motion used during single-step balance recovery from a forward fall. J. Biomech. 34 (1), 67–73. doi:10.1016/s0021-9290(00)00152-4
Yang, C., Komura, T., and Li, Z. (2017). “Emergence of human-comparable balancing behaviours by deep reinforcement learning”, in IEEE-RAS 17th international conference on humanoid robotics (humanoids), IEEE, 372–377.
Yang, F., Anderson, F. C., and Pai, Y. C. (2007). Predicted threshold against backward balance loss in gait. J. Biomech. 40 (4), 804–811. doi:10.1016/j.jbiomech.2006.03.015
Yun, S. K., and Goswami, A. (2011). “Momentum-based reactive stepping controller on level and non-level ground for humanoid robot push recovery”, in IEEE/RSJ International conference on intelligent robots and systems. IEEE, 3943–3950.
Keywords: boundary of balance, margin of stability (MOS), extended MOS, center of mass, toe link, foot rocking, linear inverted pendulum, standing posture
Citation: Mummolo C, Akbas K and Carbone G (2021) State-Space Characterization of Balance Capabilities in Biped Systems with Segmented Feet. Front. Robot. AI 8:613038. doi: 10.3389/frobt.2021.613038
Received: 01 October 2020; Accepted: 07 January 2021;
Published: 26 February 2021.
Edited by:
Marco Ceccarelli, University of Rome Tor Vergata, ItalyReviewed by:
Libo Meng, Beijing Institute of Technology, ChinaCopyright © 2021 Mummolo, Akbas and Carbone. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Carlotta Mummolo, Y211bW1vbG9AbmppdC5lZHU=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.