 Desh Deepak Sharma1*
Desh Deepak Sharma1* Jeremy Lin2
Jeremy Lin2- 1Department of Electrical Engineering, MJP Rphilkhand University, Bareilly, India
- 2John Hopkins University, Baltimore, MD, United States
A cost-effective solution with less human involvement must be developed for medical waste (MW) transportation. A learning-based coordinated unmanned aerial vehicle–unmanned ground vehicle (UAV–UGV) (CUU) framework, currently unavoidable use, with a transfer learning algorithm is suggested. A transfer learning algorithm is implemented for collision-free optimal path planning. In the framework, mobile ground robots collect medical waste from waste disposal centers through the pick-and-place technique. Then, networked drones lift the collected medical waste and fly through a predefined optimal trajectory. The framework considers the dynamic behavior of the environment and explores the actions for picking, placing, and dropping medical waste. A deep reinforcement learning mechanism has been incorporated for each successful or unsuccessful action by the framework to provide the rewards. With optimal policies, the coordinated UAV and UGV change their actions in dynamic conditions. An optimal cost of transportation of medical waste by the proposed framework is created by considering the weight of MW packets as the payload capacity of a CUU framework, the cost of steering the UAV and UGV, and the time required to transport the MW. The effectiveness of the CUU framework for MW transportation has been tested using MATLAB. The MW transportation data have been encrypted using an encryption key for security and authenticity.
1 Introduction
In recent years, the amount of medical waste has increased due to increased numbers of unmanned aerial vehicle healthcare centers. These centers produce a large amount of medical waste. The congestion in cities creates problems in the transportation of medical waste. Much medical waste is disposed of using ordinary and contemporary methods, including incineration, steam sterilization, microwave, and landfill disposal (Mishra et al., 2020). The medical wastes include hypodermic needles, hypodermic needles with attached syringes, and needles with attached tubing, blades, broken glass, acupuncture needles, and pipettes, some contaminated with biohazardous or pharmaceutical material. These are generated from most patient care and clinical support areas. The healthcare industry is increasing rapidly, so an effective solution must be developed for the transportation of medical waste to the disposal centers with less human contact. Improved education and standards must be defined for adequate medical waste management (Windfeld and Brooks, 2015). Much planning and logistics work must be done to manage medical waste efficiently in hospital systems.
A peer-to-peer scheme could be created for hazardous medical waste treatment to avoid illegal usage in medical waste treatment. Inadequate management of medical waste in healthcare centers creates health issues for employers of these centers and draws global attention. Due to storage capacity limitations at medical centers, collection services should occur at regular intervals. A periodic and minimum route scheme must be developed to collect medical waste from dispersed hospitals. The major process of medical waste management is segregation, labeling, and separation (Shareefdeen et al., 2022).
Medical waste management comprises the process of separation, short-term storage, safe disposal, and transfer of medical waste. Standards for medical waste management must be defined. The cost that may be incurred in medical waste transportation should be defined, and new schemes must be developed to minimize this cost (Koçak et al., 2016).
A hybrid decision-making approach comprising interval 2-tuple induced distance operators with similarity to the ideal solution (TOPSIS) has been suggested to tackle the healthcare treatment. A trash system equipped with a camera and quick response (QR) code was created for medical waste management to address the uncertainty and diversity noted in the assessment report (Lu et al., 2016). In that study, artificial intelligence techniques were implemented in the classification of medical wastes that have different features. The molecular structure of the wastes was to be analyzed with a spectrum analyzer.
Major problems associated with hazardous medical waste management are inadequate and unstandardized supervision. Current methods of detecting hidden dangers in hazardous waste disposal are inefficient. Implementing fifth-generation (5G) wireless communication technology and big data in the medical waste treatment process is challenging. A platform comprising 5G broadband wireless communication technology and a big data approach is developed for an effective point-to-point (P2P) goods information system (Wang and Nai, 2021).
Radio frequency identification (RFID) technology has been implemented in medical waste management for item collection and transmission without manual intervention. The RFID technology can perform object recognition, multi-object recognition, and object tracking [8]. Existing healthcare waste treatment methods are steam sterilization, microwave, plasma pyrolysis, chemical disinfection, and incineration (Liu et al., 2019). RFID can be used to detect lost medical waste items and prevent illegal recycling and poor supervision. The RFID technology can be used to establish a tracking and processing system, incineration center subsystems, and effective supervision of medical waste (Sun et al., 2019; Wang et al., 2021). The interaction rules are designed for medical waste management. Blockchain-based methods are suggested for medical waste disposal to create trust among different stakeholders (Ahmad et al., 2021). Multi-criteria decision-making methodology has been implemented. The associated uncertainty present in multi-criterion decision-making is tackled by the Pythagorean fuzzy sets.
The process of medical waste management comprises medical waste generation from hospitals and testing centers, waste collection at waste store rooms, waste transportation, waste segregation and sorting, waste treatment, and waste disposal and recycling (Ahmad et al., 2021). A blockchain-based process is implemented to trace the medical equipment and corresponding medical waste. The main stockholders in medical waste management are doctors, medical test operators, patients, health workers, and waste collection, transportation, and disposal companies.
A literature review revealed the limited use of drones in the transfer of medical waste. A collection problem could be considered to obtain an optimal trajectory. Manual collection of waste from collection points may cause health problems for employees. A coordinated multi-drone mobile robot framework could collect medical waste and transfer it to disposal centers with minimum human intervention.
1.1 Research gap
Identifying research gaps is crucial for advancing knowledge in any field. In the context of medical waste transportation, the following potential research gaps could be explored:
• Efficiency and optimization: Explore methods to optimize medical waste transportation routes to minimize costs and reduce environmental impact. Consider factors such as fuel efficiency, vehicle capacity utilization, and scheduling.
• Technological innovations: Investigate the integration of emerging technologies (such as IoT, RFID, or GPS tracking) to enhance the efficiency and tracking capabilities of medical waste transportation. Evaluate how these technologies can improve real-time monitoring, route planning, and overall logistics.
The article is organized as follows: Section 1 provides the introduction. Section 2 discusses the occupational and transportation risks in medical waste transportation. Section 3 overviews a coordinated unmanned aerial vehicle (UAV) and unmanned ground vehicle (UGV) framework, and Section 4 discusses the application of a UAV and UGV framework in medical waste transportation. Section 5 discusses secure medical waste data. Section 6 includes problem formulation with a proposed currently unavoidable use (CUU) framework for medical waste transportation. Section 7 suggests a transfer learning mechanism for MW transportation. Section 8 includes the reinforcement learning mechanism for the framework. Simulation and discussions are covered in Section 9. Section 10 provided the conclusion.
2 Occupational and transportation risks in medical waste
In the context of medical waste management, occupational risk and transportation risk take on specific considerations due to the unique nature of medical waste. Medical waste includes materials generated in healthcare facilities that may threaten human health and the environment if not handled properly. The following sections discuss how occupational and transportation risks relate to medical waste.
2.1 Occupational risks in medical waste management
2.1.1 Exposure to infectious agents
Exposure to infectious agents: Healthcare workers involved in the collection, handling, and disposal of medical waste are at risk of exposure to infectious agents, such as bacteria, viruses, and other pathogens.
2.1.2 Needlestick injuries
Improper disposal of sharps, such as needles and syringes, can lead to needlestick injuries, posing a risk of infection and other health issues.
2.1.3 Chemical exposure
Some medical waste may contain hazardous chemicals or pharmaceuticals, exposing workers to potential health hazards if not managed properly.
2.1.4 Heavy lifting and ergonomic hazards
Workers involved in lifting and moving heavy containers of medical waste may face ergonomic risks, leading to musculoskeletal issues. Occupational safety measures in medical waste management include the use of personal protective equipment (PPE), proper training, safe handling protocols, and the implementation of engineering controls to minimize exposure.
2.2 Transportation risks in medical waste management
2.2.1 Accidental spills and leaks
During transportation, medical waste containers may be at risk of spills or leaks, especially if not securely sealed. This can lead to contamination and exposure risks for transport personnel and the general public.
2.2.2 Inadequate packaging
Improperly packaging medical waste during transportation can lead to breakage, spillage, or damage to containers, increasing the risk of exposure to infectious agents.
2.2.3 Traffic accidents
Transportation accidents can result in the release of medical waste into the environment, creating potential hazards for first responders and others involved in the cleanup.
2.2.4 Regulatory compliance
Failure to comply with transportation regulations for medical waste can lead to legal consequences and increased risks. Transportation safety measures involve proper packaging, labeling, and securing of medical waste during transit. Compliance with transportation regulations, including those related to hazardous materials, is crucial to mitigating risks.
2.2.5 Integrated approach
Medical facilities and waste management companies must adopt an integrated approach to occupational safety and transportation risk management. Comprehensive training programs for healthcare workers and transport personnel are essential to ensure awareness of risks and proper handling procedures. Regular inspections, maintenance of transport vehicles, and adherence to relevant regulations contribute to minimizing risks associated with the transportation of medical waste. By addressing both occupational and transportation risks in medical waste management, organizations can promote the safety of their workers, protect public health, and prevent environmental contamination.
3 Coordinated UAV and UGV framework: an overview
Coordination between unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) is essential for the successful implementation of various applications, ranging from surveillance and reconnaissance to disaster response and agriculture. Key aspects of UAV–UGV coordination are discussed in the sections that follow.
3.1 Inter vehicle communication
UAVs and UGVs must be equipped with communication systems to exchange real-time information. This can include data on the environment, mission status, and obstacles.
3.2 Command and control
A robust command and control (C2) system enables seamless communication between the UAV operator, the UGV operator, and the vehicles themselves. This facilitates coordination in mission planning and execution.
3.3 Collaborative mission planning
3.3.1 Shared objectives
UAVs and UGVs must have shared mission objectives. Collaborative planning involves defining roles, tasks, and responsibilities for each vehicle based on its capabilities.
3.3.2 Adaptive planning
Adapting the mission plan in response to changing conditions or unexpected events is crucial. Both vehicles should be capable of receiving and executing updated mission parameters.
3.4 Sensing and perception
3.4.1 Sensor fusion
Combining data from various sensors on both UAVs and UGVs enhances the overall perception of the environment. This can include visual cameras, lidar, radar, and other sensors.
3.4.2 Obstacle avoidance
Vehicles should be equipped with obstacle detection and avoidance systems to navigate through complex environments without collisions.
3.5 Localization and mapping
3.5.1 Shared maps
UAVs and UGVs should share a common map of the environment. This allows each vehicle to understand the other’s position, helping in collaborative decision-making.
3.5.2 Simultaneous localization and mapping
Advanced localization techniques, such as simultaneous localization and mapping (SLAM), enable the vehicles to map their surroundings in real time and localize themselves within the shared map.
3.5.3 Swarm intelligence
Coordination can benefit from principles of swarm intelligence, where multiple vehicles work together in a decentralized manner. This enables flexibility, scalability, and resilience in dynamic environments.
3.5.4 Dynamic formation control
UAVs and UGVs can coordinate their movements to maintain a specific formation, adapting to changes in the environment or mission requirements.
3.6 Data fusion and sharing
3.6.1 Data integration
Combining data collected by both UAVs and UGVs enhances overall situational awareness. Integrated data can be valuable for decision-making.
3.6.2 Real-time data sharing
Establishing a reliable data sharing mechanism ensures that information collected by one vehicle is quickly transmitted to others, facilitating coordinated response.
3.6.3 Redundancy and fault tolerance
3.6.3.1 Redundant systems
To enhance reliability, both UAVs and UGVs should have redundant systems. In case of a failure in one vehicle, the others can compensate and continue the mission.
3.6.4 Fault tolerance
The coordination system should be designed to handle faults gracefully, allowing the vehicles to adapt and continue functioning even in the presence of failures. Effective UAV–UGV coordination enhances the capabilities of autonomous systems, making them more versatile and adaptable to a variety of applications. This coordination is particularly valuable in scenarios where a combination of aerial and ground-based perspectives is required for comprehensive information gathering and mission execution.
4 UAV and UGV in medical waste transportation
Within a healthcare facility, regulated storing and transporting of medical waste strategies must be created. Safe transport and storage facilities ensure health and environmental safety. The medical waste disposal containers are classified based on color: red for biohazardous or sharp waste, yellow for chemotherapy waste and soiled and contaminated linen, black for Resource Conservation and Recovery Act (RCRA)-regulated waste, and blue for non-RCRA-regulated waste. Challenges accompany the handling of medical waste because it has impacts on the environment and risks to public health. Figure 1 shows some of these challenges and impacts.
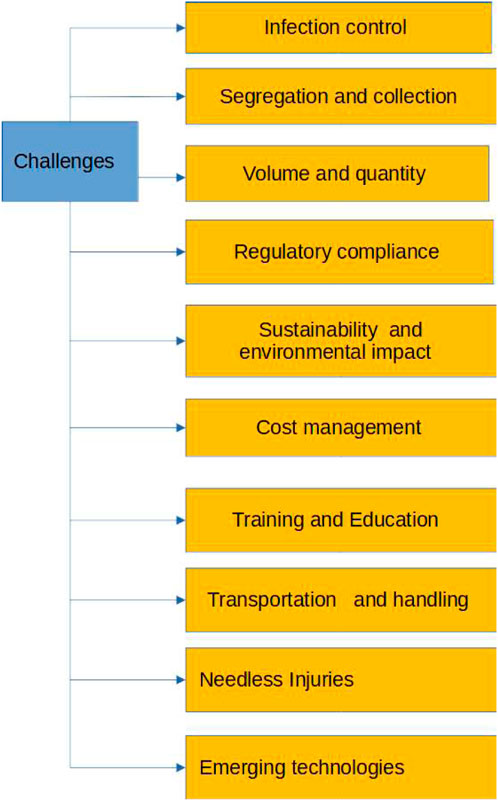
FIGURE 1. Challenges associated with the transportation of medical waste.
Drones are revolutionizing medical waste transportation. A coordinated robot drone framework minimizes the transportation and occupational risks concerning the temporary storage of hazardous wastes at the medical centers, as shown in Figure 2. The framework minimizes the risks associated with the transportation of potentially dangerous microorganisms. The framework collects and transports infectious waste from scattered collection points to disposal centers.
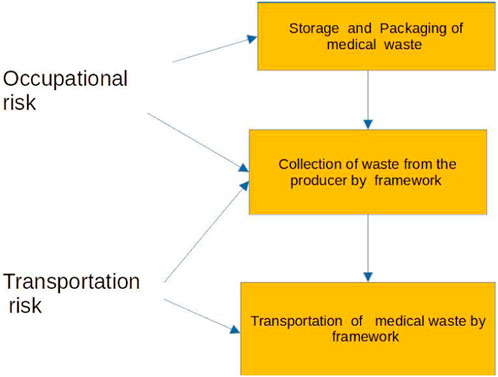
FIGURE 2. Risks minimization with the CUU framework.
The flying operating time of drones is restricted by payload weight and battery capacity. Turbulence is also a hindrance. The latency-guaranteed multi-hop wireless communication system is considered for the flight of a drone moving from the line of sight (LOS) to beyond the line of sight (BLOS) with an obstacle avoidance facility. The obstacles may be trees, buildings, small hills, etc. The drone control mechanism comprises a multi-hop link or direct link to obtain the adaptive flying route (Kagawa et al., 2017).
5 Secure medical waste data
Efficient MW management must be developed to avoid dangerous microorganisms that affect public health and the environment. During the treatment and disposal of medical waste, pathogens, and toxins are released. It is mandatory to develop an optimal logistical solution for medical waste transportation to minimize contact with operators and health workers. Relevant data include optimal and secure MW transportation solution suggests the MW data structure as weight of the waste, the time of waste pickup, sensor state data, and order status.
Rqmw: Medical waste shipment request.
Tp: Waste pickup time.
Td: Waste disposal time.
Wmw: Weight of the waste.
Idmw: ID of medical waste (created with Secure Hash Algorithm (SHA)-256).
Aumw: Medical waste authorization.
Omw: Location of medical waste.
Qk = { Rqk,mw, Tk,p, Tk,d, Wk,mw, Idk,mw, Auk,mw, Ok,mw}.
5.1 Hash key with SHA-256
In the context of hash functions, a “hash key” usually refers to the input (or key) provided to a hash function to generate a hash value. A hash function takes an input (or key) and produces a fixed-size string of characters, which is typically a hash code. SHA-256-bit is a cryptographic hash function that belongs to the SHA-2 family of hash functions. It produces a fixed-size output of 256 bits (32 bytes) and is commonly used for various security applications and protocols.
5.2 Proposed MW shipment process
A medical waste shipment process with the following steps has been suggested:
Input: Medical waste data
Create: Medical waste shipment request
Set: Rqmw = 1
Load: Pick up MW packet by CUU framework
Time: Generate the timestamp of MW pickup
Carry: Ship the MW packet to a disposal center
Time: Generate the timestamp of MW disposal
Set: Aumw = 1 after authorization
Encrypt: Do encrypt Qk with a secure key
Output: Encrypted Qk.
6 Proposed CUU framework for medical waste transportation
After it is collected from health centers, medical waste must be transported to the transit points. From transit points, the CUU framework comprising UGVs and multiple UAVs collects the medical wastes and transports them to the disposal centers Figure 3. The whole “seek” area is divided into subareas. Each subarea is assigned to a different drone. The flight time of each drone is estimated according to the charging of the battery. The control center acquires the drones’ real-time data, such as battery information, coordinates, and sensor data. The seek area is divided into the n unit cube parts with 1-m dimension. The WiFi communication zone comprises
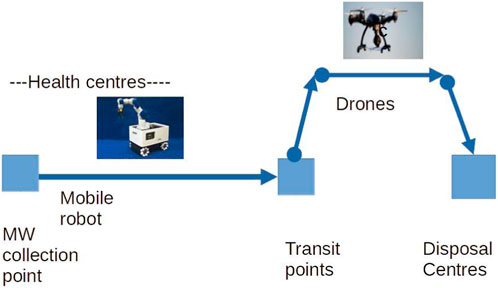
FIGURE 3. CUU framework for medical waste transportation.
6.1 Problem formulation
An appropriate framework must be designed for the robot drone MW transportation system. One such framework is shown in Figure 3. Generally, drones have limited hovering time because of the battery capacity. The costs associated with the total distances are minimized. In this framework, a MW robot drone accomplishes the assigned tasks of MW transportation. The coordinated UGV–UAV MW transport problem is formulated as shown below:
where Tmr and Tdr are the time of transportation of medical waste taken by a mobile robot and a drone, respectively. Cmr and Cdr are the cost per unit weight incurred in transportation of medical waste by a mobile robot and a drone, respectively. amr, adr, aL, and aH are the scaling factors. The
Let dcmw = {O1,mw, O2,mw, , Om,mw } represent the set of all medical waste disposal centers and all the nodes in the network, where
According to battery capacity (state of charge, SoC) and payload capacity W) of the independent drone, the predicted route of UAV is denoted as
The predicted routes of the mobile robot and the drone comprise the set of nodes and are defined as shown below:
where
where vdr is the average velocity of drone and vmr is the average velocity of a mobile robot (Wang et al., 2019).
6.2 Proposed learning-based coordinated UAV and UGV framework
Drone path planning considers the zones at different altitudes with a total n number of waypoints
6.2.1 UGV steering
The cost of steering is defined according to the number of nodes of the path, as the more nodes, the higher the cost of steering. The cost of steering is defined as shown below:
where hs and hT are starting and terminating waypoints.
6.2.2 UAV steering
The cost of UAV steering depends on the altitude of the path. The cost will be higher if the altitude of the path is higher. At lower altitudes, the drone may fly with improved efficiency. The cost of UAV steering is defined as follows:
where zm (hi, hi+1) is the mean flying height at segments (hi, hi+1). zmax and zmin are maximum and minimum altitudes, respectively. The following algorithm has been proposed for the coordinated steering of UAV and UGV. The weight of an edge between two waypoints is determined by Zf, as shown in Equation (6.1).
Coordinated UAV and UGV steering algorithm is mentioned below.
Input: A weighted undirected graph G = (V, E, v)
create 3D coordinates
hi+1 ← steerUAVandUGV (hi+1, hi)
Sort the edges between two waypoints in E in decreasing order by weight and check mapping (hi+1)
if path (hi+1, hi) is obstacle free
Check if Zf decreases and r(t) increases
Return True (hi+1)
Output: A minimum spanning tree for the UGV–UAV route
end
7 Proposed transfer learning mechanism for MW transportation with CUU
7.1 Bayes model
The Bayesian linear regression learning model implements the adaptive approach to enhance the performance of the predictive model with new data available along with available posterior data. The Bayesian learning model is described as follows:
where xi = [SoCi, Wmw,i].
The likelihood function of
As per the Bayesian theorem, the posterior distribution of the data can be obtained with the following. The predictive model of successful and unsuccessful delivery by drone incorporates the Bayesian inference, which is updated to improve its accuracy. The predictive model considers the new data Y1 and the previous data set Y2. The posterior distribution on model parameter β depending on data Y1 and data Y2 is formulated with the Bayesian theorem and given below (Xing et al., 2021):
7.2 Multinomial logistic regression
The multinomial logistic regression represents the logistic regression extension of the class of many systems. The multinomial logistic regression model is developed based on the available data, and this can be used for the predictions based on previous data. The hyperparameter of the multinomial logistic regression must be tuned. The multinomial logit model is defined in terms of original probability πi. The multinomial logit model algorithm for the probabilistic optimal cost of MW transportation is defined below:
Multinomial logit model algorithm:
Initialization: medical waste data
Generate data of transportation costs CT = {Cmr, Cdr}, and route of transportation RT = { Rmr: Rdr} and
Given multi-logit (Yk|β) obtained for a past class of MW
Let
Define prior
Procedure PARTITION (Zf, Y) → partition of the data set into training and testing
Update the model using the training data set
Compute Zf
Compute the maximum likelihood of Y as
Obtain posterior distribution as
Randomly generate n samples from
Update
Procedure EVALUATION Evaluating performance using the testing data set
Make a prediction
8 Reinforcement learning process of the framework
Let S and A represent a discrete set of environment states and a set of actions, respectively. In every state s ∈ S, a framework of multi-drone mobile robots takes feasible actions a ∈ A over the finite learning horizon. The framework transits to the next state s1 ∈ S, and the framework receives an immediate reward for performing the desired action. However, the framework is penalized for each undesired action leading to a collision. The goal of the framework is to maximize its total reward. It does this by learning which action is optimal for each state. With available information of
where
where s′ ∼ P represents the next state, which is sampled from a distribution P (.|s, a). This Bellman function starts the learning approach of approximately
close to the Bellman equation, a mean square Bellman error (MSBE) is defined below:
where d equals 1 if s′ is terminal; else, it is 0. In the target networks, the target term is defined below:
By minimizing the MSBE loss, it is possible to track this target by
where
where
where
Collecting medical waste manually may cause health problems for the employees of the medical centers. A coordinated multi-drone mobile robot framework can collect medical waste and transfer it to disposal centers with minimum human intervention.
9 Simulations and case study
A hospital located in Bareilly, India, is considered for a medical waste transportation study. Currently, medical waste is transported in trucks. This system could expose the people involved in MW transportation to risks. In some situations, unauthorized transportation may occur. The drone possesses a camera and an inertial measurement unit (IMU) to create reference elevation movement, and the robot generates a probabilistic network of paths. The ground robot and aerial drone work collectively to create the multi-level platform. The real-time appearance-based mapping technique is used to localize the robot and map the environment. The IMU estimates the attitude using multinomial logistic regression. Both visual and inertial data are combined to produce odometry estimates. The ground robot with four mecanum wheels is a custom-designed platform. The UAV creates a 3D map with a ground path and altitude information using the IMU and a camera. The ground robot follows the tracks within the 3D map of the environment generated by the UAV. Synergistically, the robot drone platform is equipped with sensors such as a PIR sensor, infrared camera, and Intel RealSense D435 with IMU. The ground robot moves on predefined paths to slow, stop, or reroute its path for collection of medical waste. The UAV is controlled in tandem to collect the packet of medical waste and then steer away for transportation of the packet to the MW disposal centers.
The types of medical waste are classified and represented by colors (red, yellow, blue, and black). The considered medical wastes comprises 110 gauze
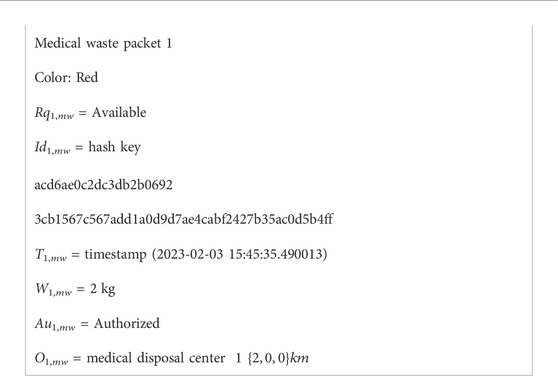
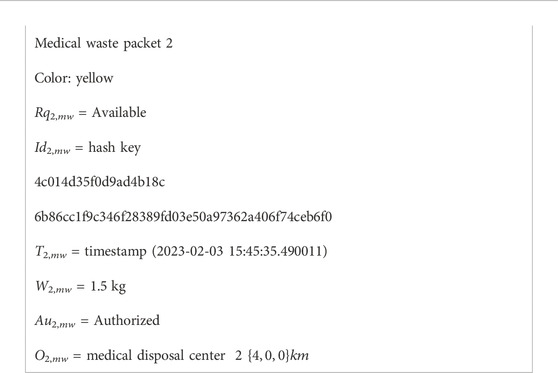
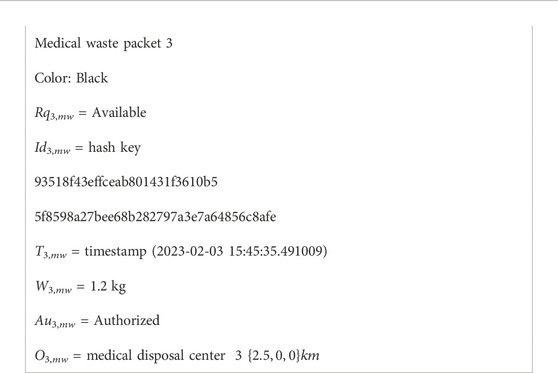
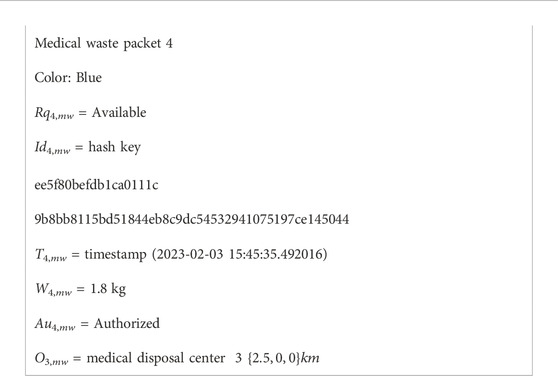
In a similar fashion, the next subsequent encrypted MW packet data are obtained. Let maximums of Tmr and Tdr be taken as 10 min and 25 min. The maximum velocities of the robot and drone are chosen as 5 km/h and 80 km/h, respectively. The various maximum values of transportation costs are taken as Cmr = 5 Rs/kg, Cdr = 50 Rs/kg, and Cdr = 40 Rs/kg. One hundred (100) samples of MW data are generated. After taking the mean velocities of the robot and drone at different time instants, the average velocities of the robot and drone are obtained as 2.48 km/h and 47.8 km/h, respectively. Next, the prediction error is calculated as 0.4%.
The posterior density was obtained with the transfer learning algorithm, and a predicted route for the mobile robots and drones is generated in a 3D environment Figure 4. Using the data related to the SoC of the battery and the MW weight, the proportional logit model is obtained:
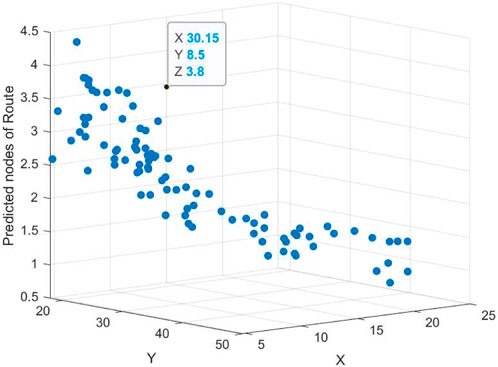
FIGURE 4. Predicted nodes of the drone’s route from the transit point to the disposal center.
The SoC of the battery of the drone and the weight of the medical waste packet are considered for the prediction of the optimal route length of the framework (18). The SoC of batteries varies from 0.2 to 0.8, and the weight of MW varies from 1 kg to 2 kg. The optimal predicted velocity of the robot and drone are shown in Figures 5 and 6, respectively (14)–(15). The rewards of actions done by robots and drones are obtained with a Q-learning mechanism using (16). The accumulative rewards are estimated as per (17) and shown in Figure 7. The coordinated framework has been rewarded for the optimal and successful delivery of medical waste from the collection point to the disposal center through transit points. At various iterations, the rewards vary from 0.7 to 0.9. The limitations of the various UAV–UGV coordination algorithms are mentioned in Table 1. None of these algorithms is applied in medical waste transportation. The effectiveness of the proposed learning-based UAV–UGV coordinated algorithm is shown by obtaining the results, and the features of this algorithm are mentioned in Table 2.
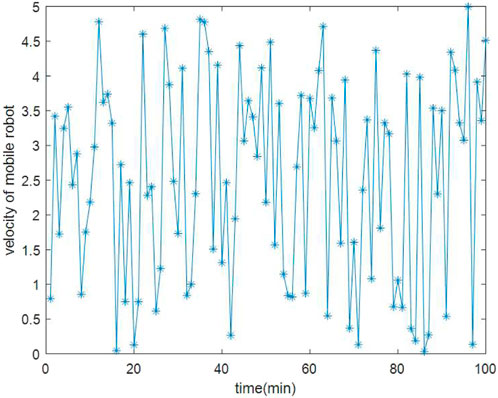
FIGURE 5. Predicted velocity (km/hr) of the mobile robot.
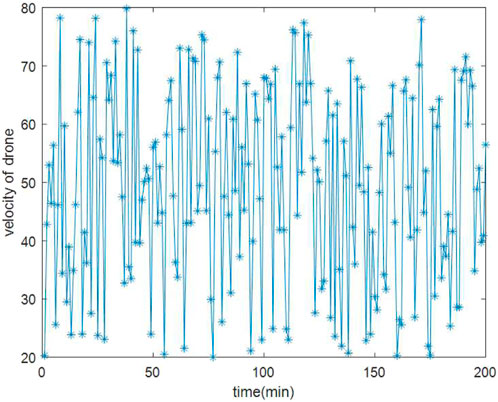
FIGURE 6. Predicted velocity (km/hr) of the drone.
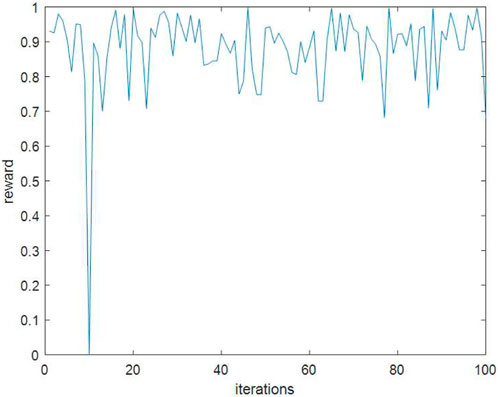
FIGURE 7. Rewards of the proposed coordinated framework of the robot and drone.
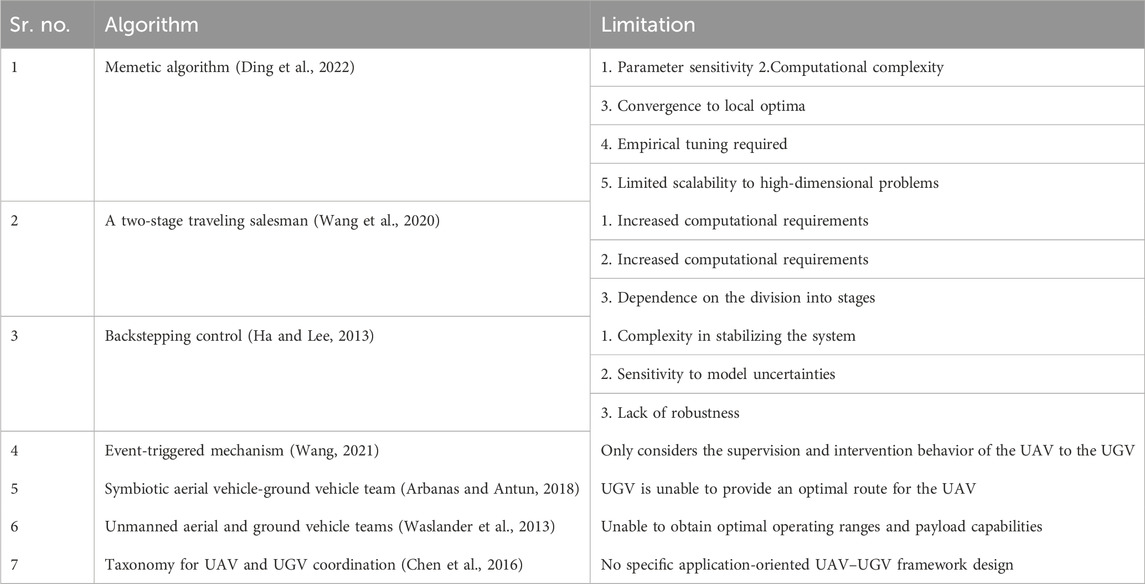
TABLE 1. Comparative study on UAV–UGV coordination algorithms.
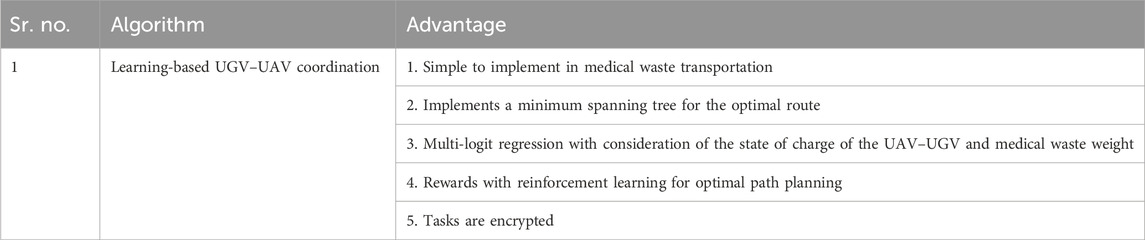
TABLE 2. Features of learning-based UGV–UAV coordination algorithm.
10 Conclusion
In this paper, a coordinated UAV–UGV framework is proposed for medical waste transportation to minimize human involvement. For optimal medical waste transportation, a learning-based mechanism has been implemented to predict the route length followed by the robots and the drone. The time-stamped medical waste packets are encrypted with hash keys. The predicted route length from the transit point to the disposal center has been obtained. The reinforcement learning algorithm has been considered for optimal successful and unsuccessful transportation of medical waste from collection points to disposal centers.
11 Future research direction
As the field of medical waste transportation continues to evolve, several potential future research directions can be explored to address emerging challenges and promote sustainable practices. Here are some areas that researchers might consider:
• Green technologies and sustainable practices: Examine and create eco-friendly technology for the transportation of medical waste. To lessen the influence of transportation on the environment, this could involve using hybrid or electric cars, renewable energy sources, and other environmentally friendly methods.
• Circular economy approaches: Examine medical waste management circular economy models, emphasizing transportation. To reduce total waste generation, investigate how waste materials and by-products can be recycled, repurposed, or reused in a closed-loop system.
• Integration of artificial intelligence (AI) and machine learning (ML): Analyze the possibilities for applying AI and ML to forecast transportation requirements, optimize medical waste transit routes, and enhance overall logistics effectiveness. Real-time tracking, predictive analytics, and data-driven decision-making may all be considered.
• Blockchain technology for traceability: Examine how blockchain technology can improve the transparency and traceability of the transfer of medical waste. Create safe, decentralized systems to monitor the flow of medical waste, guaranteeing adherence to rules and lowering the possibility of unauthorized disposal.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
DS: conceptualization, methodology, and writing–original draft. JL: resources, supervision, and writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This work was supported by the funded project by the Council of Science and Technology, Lucknow, India (CST/D-3246).
Acknowledgments
The authors acknowledge the affiliating institutions of authors and the Council of Science and Technology, Lucknow, India.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ahmad, R. W., Salah, K., Jayaraman, R., Yaqoob, I., Omar, M., and Ellahham, S. (2021). Blockchain-based forward supply chain and waste management for covid-19 medical equipment and supplies. IEEE Access 9, 44905–44927. doi:10.1109/ACCESS.2021.3066503
Arbanas, I. A. C. M. e. a., Antun, I., Car, M., Orsag, M., Petrovic, T., and Bogdan, S. (2018). Decentralized planning and control for uav–ugv cooperative teams. Auton. Robot. 42, 1601–1618. doi:10.1007/s10514-018-9712-y
Celtek, S. A., Durdu, A., and Kurnaz, E. (2018). “Design and simulation of the hierarchical tree topology based wireless drone networks,” in International Conference on Artificial Intelligence and Data Processing (IDAP), USA, 21-22 Sept. 2019 (IDAP), 1–5. doi:10.1109/IDAP.2018.8620755
Chen, J., Zhang, X., Xin, B., and Fang, H. (2016). Coordination between unmanned aerial and ground vehicles: a taxonomy and optimization perspective. IEEE Trans. Cybern. 46, 959–972. doi:10.1109/TCYB.2015.2418337
Ding, Y., Xin, B., Dou, L., Chen, J., and Chen, B. M. (2022). A memetic algorithm for curvature-constrained path planning of messenger uav in air-ground coordination. IEEE Trans. Automation Sci. Eng. 19, 3735–3749. doi:10.1109/TASE.2021.3135044
Ha, C. S., and Lee, D. (2013). “Preliminary result of vision-based teleoperation of an uav and ugvs team,” in 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), China, Oct. 30 - Nov 02, 2013 (URAI). 128–128. doi:10.1109/URAI.2013.6677492
Kagawa, T., Ono, F., Shan, L., Takizawa, K., Miura, R., Li, H.-B., et al. (2017). “A study on latency-guaranteed multi-hop wireless communication system for control of robots and drones,” in 2017 20th international symposium on wireless personal multimedia communications (New York: WPMC), 417–421. doi:10.1109/WPMC.2017.8301849
Koçak, O., Kurtuldu, H., Akpek, A., Koçoğlu, A., and Eroğul, O. (2016). A medical waste management model for public private partnership hospitals. Med. Technol. Natl. Congr. (TIPTEKNO), 1. doi:10.1109/TIPTEKNO.2016.7863138
Liu, Z., Xu, H., Zhao, X., Liu, P., and Li, J. (2019). Multi-attribute group decision making based on intuitionistic uncertain linguistic hamy mean operators with linguistic scale functions and its application to health-care waste treatment technology selection. IEEE Access 7, 20–46. doi:10.1109/ACCESS.2018.2882508
Lu, C., Xian, X., and Hu, C. (2016). Health-care waste treatment technology selection using the interval 2-tuple induced topsis method. Int. J. Environ. Res. Public Health 13, 10127–10134. doi:10.3389/fnins.2013.12345
Mishra, A. R., Mardani, A., Rani, P., and Zavadskas, E. K. (2020). A novel edas approach on intuitionistic fuzzy set for assessment of health-care waste disposal technology using new parametric divergence measures. J. Clean. Prod. 272, 122807. doi:10.1016/j.jclepro.2020.122807
Shareefdeen, Z., Ashoobi, N., and Ilyas, U. (2022). Medical waste management and treatment technologies. Cham: Springer International Publishing. 113–133. doi:10.1007/978-3-030-95262-4_5
Sun, S., Hu, J., Cao, Y., and Zhou, W. (2019). “Discussion on the application of rfid technology in medical waste management,” in 10th International Conference on Information Technology in Medicine and Education (ITME), South Koren, Aug. 23 2019 (ITME), 120–124. doi:10.1109/ITME.2019.00037
Wang, C., Ma, Y., and Zhong, G. (2021). “Iot monitoring system of medical waste based on artificial intelligence,” in 2021 7th Annual International Conference on Network and Information Systems for Computers (ICNISC), USA, 23-25 July 2021 (ICNISC), 139–143. doi:10.1109/ICNISC54316.2021.00034
Wang, D., Hu, P., Du, J., Zhou, P., Deng, T., and Hu, M. (2019). Routing and scheduling for hybrid truck-drone collaborative parcel delivery with independent and truck-carried drones. IEEE Internet Things J. 6, 10483–10495. doi:10.1109/JIOT.2019.2939397
Wang, G. J., Guo, J., Tian, G., Chen, Y., and Huang, J. (2021). Event-triggered intervention framework for uav-ugv coordination systems. Machines 9, 371. doi:10.3390/machines9120371
Wang, K., and Nai, W. (2021). “Application of 5g wireless communication technology in hazardous medical waste treatment,” in IEEE International Conference on Software Engineering and Artificial Intelligence (SEAI), China, 10-12 June 2022 (IEEE), 2021. 87–90. doi:10.1109/SEAI52285.2021.9477538
Wang, Q., Lu, Q., Chen, H., Tian, J., and Su, Y. (2020). Path planning for uav/ugv collaborative systems in intelligent manufacturing. IET Intell. Transp. Syst. 14, 1475–1483. doi:10.1049/iet-its.2019.0688
Waslander, N. K., Steven, L., Kartidjo, M., and Yoon, A.Kwang-Joonand Budiyono (2013). Unmanned aerial and ground vehicle teams: recent work and open problems. Japan: Springer, 21. doi:10.1007/978-4-431-54276-6_2
Windfeld, E. S., and Brooks, M. S.-L. (2015). Medical waste management – a review. J. Environ. Manag. 163, 98–108. doi:10.1016/j.jenvman.2015.08.013
Keywords: medical waste, reinforcement learning, transfer learning, unmanned aerial vehicle, unmanned ground vehicle
Citation: Sharma DD and Lin J (2024) Secure learning-based coordinated UAV–UGV framework design for medical waste transportation. Front. Remote Sens. 5:1351703. doi: 10.3389/frsen.2024.1351703
Received: 06 December 2023; Accepted: 14 February 2024;
Published: 15 March 2024.
Edited by:
Salvatore Manfreda, University of Naples Federico II, ItalyReviewed by:
Tien Anh Tran, Seoul National University, Republic of KoreaDeepak Prashar, Lovely Professional University, India
Copyright © 2024 Sharma and Lin. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Desh Deepak Sharma, ZGVzaC5zaGFybWFAbWpwcnUuYWMuaW4=