
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Plant Sci. , 07 September 2021
Sec. Technical Advances in Plant Science
Volume 12 - 2021 | https://doi.org/10.3389/fpls.2021.705737
This article is part of the Research Topic Digital Imaging of Plants View all 22 articles
 Zhenhui Zheng1
Zhenhui Zheng1 Juntao Xiong1*
Juntao Xiong1* Huan Lin1
Huan Lin1 Yonglin Han1
Yonglin Han1 Baoxia Sun2
Baoxia Sun2 Zhiming Xie1
Zhiming Xie1 Zhengang Yang1
Zhengang Yang1 Chenglin Wang3
Chenglin Wang3The accurate detection of green citrus in natural environments is a key step in realizing the intelligent harvesting of citrus through robotics. At present, the visual detection algorithms for green citrus in natural environments still have poor accuracy and robustness due to the color similarity between fruits and backgrounds. This study proposed a multi-scale convolutional neural network (CNN) named YOLO BP to detect green citrus in natural environments. Firstly, the backbone network, CSPDarknet53, was trimmed to extract high-quality features and improve the real-time performance of the network. Then, by removing the redundant nodes of the Path Aggregation Network (PANet) and adding additional connections, a bi-directional feature pyramid network (Bi-PANet) was proposed to efficiently fuse the multilayer features. Finally, three groups of green citrus detection experiments were designed to evaluate the network performance. The results showed that the accuracy, recall, mean average precision (mAP), and detection speed of YOLO BP were 86, 91, and 91.55% and 18 frames per second (FPS), respectively, which were 2, 7, and 4.3% and 1 FPS higher than those of YOLO v4. The proposed detection algorithm had strong robustness and high accuracy in the complex orchard environment, which provides technical support for green fruit detection in natural environments.
As one of the most important fruit production countries, China has the largest citrus industry in the world (Liu et al., 2019). Limited by the complexity of environments in the country, citrus picking in China is still dominated by inefficient manual operation. Therefore, the development of intelligent fruit-picking robots is of great value and significance for alleviating labor shortage, saving labor costs, and promoting intelligent agricultural production. Thus, machine vision is the key technology for the development of the ability of picking robots to achieve precise operation, but the detection accuracy and efficiency of existing fruit-picking robots still need to be improved (Liang et al., 2020).
In the complex outdoor environment, the accurate and effective detection of citrus fruits is the prerequisite for robots to complete picking tasks efficiently. The detection accuracy determines the positioning accuracy, which is of great significance for robots to achieve successful picking. Compared with mature fruits with colors different from the background, green fruits are more difficult to recognize in natural environments. The difficulties are as follows: (1) the natural environment has complex illumination, where different light intensities and uneven illumination at different daytime periods would reduce the quality of image acquisition; (2) citrus fruits have diverse growth states as, under natural conditions, citrus fruits are randomly distributed and overlapped with each other and can thus be easily blocked by background objects such as leaves or branches; (3) in addition to having a similar color to leaves, green citrus fruits occupy few pixels in the image due to their small size in reality, which is difficult to detect. These are the common phenomena in the actual orchard environment, and all of them cause great difficulties for algorithms when accurately detecting green citrus fruits.
In recent years, many scholars have tried to detect green citrus and made some progress in the endeavor. For example, Kurtulmus et al. (2011) proposed the concept of an “intrinsic fruit” and detected green citrus by combining color with circular Gabor texture features, subsequently reaching an algorithm accuracy of 75.3%. Sengupta and Lee (2014) proposed an algorithm using color images to detect green citrus fruits; specifically, combining shape features with Hough circle detection to realize the preliminary detection of potential fruits and used texture features. They also used Hough line detection and Canny edge detection to further remove false positives, resulting in an algorithm accuracy of 80.4%. Zhao and Lee (2016) put forward a green citrus detection method based on the sum of absolute transformation difference (SATD) and used texture features to filter out false positives, achieving an accuracy up to 83.4%. Lu and Hu (2017) proposed a hierarchical contour analysis (HCA) algorithm based on the light distribution on the surface of a fruit to realize the detection of green citrus fruits on trees, with an accuracy of 83.5%, a recall rate of 81.2%, and an execution time of 3.7 s. Lu et al. (2018) proposed a method using texture and intensity distribution to detect green citrus fruits in tree images, with an accuracy of 80.4%. Wang et al. (2018) developed a green citrus recognition and counting method based on the local binary pattern (LBP) features and the AdaBoost classifier, with an accuracy of 85.6%. He et al. (2020) proposed a deep bounding box regression forest (DBBRF) green citrus detection method based on a deep border regression forest. The average recognition accuracy and time were 87.6% and 0.759 s, respectively. In summary, the studies discussed previously mainly combined the traditional image processing methods and the basic characteristics of color, texture, and shape to realize green citrus detection. However, in the complex environment of the actual orchard, this kind of method is prone to inference from other factors, such as natural light, leaf occlusion, fruit overlap, and so on.
In addition, some scholars also used heat map, multispectral, or hyperspectral images to detect green citrus fruits. Okamoto and Lee (2009) achieved the detection of green citrus fruits by combining the hyperspectral camera in the range of 369–1,042 nm and using image processing methods such as noise reduction filtering, labeling, and region threshold segmentation. The detection accuracy of the algorithm for complete fruits was between 80 and 89%. Torres et al. (2019) proposed a green citrus detection method based on two hyperspectral reflectance imaging systems, resulting in a detection accuracy of 96.97%. Although multispectral images and hyperspectral images can provide many clues to green citrus, at the same time, there is still much information redundancy, which may lead to the poor real-time performance of the algorithm. Furthermore, compared with the color image acquisition equipment, a multispectral or hyperspectral camera is generally more expensive. Gan et al. (2018) applied the multimodal imaging method to the visual detection of green citrus for the first time, with green citrus fruits being effectively identified through the fusion of color information with thermal information, resulting in an algorithm recognition accuracy of 95.5%. Despite the high accuracy of this method, its thermal images can be easily affected by other factors such as relative humidity, ambient temperature, and wind, so it is rarely used in actual fruit detection tasks.
With the rapid development of machine learning, some researchers have begun to apply deep learning to the visual inspection of fruits (Kamilaris and Prenafeta-Boldu, 2018). Peng et al. (2018) proposed an improved single shot multi-box detector (SSD) deep learning fruit detection model by replacing the VGG16 backbone network with the ResNet-101 model. In the proposed model, the average detection accuracies of imperial orange and navel orange were 91.57 and 90.69%, respectively. Lv et al. (2019) proposed a citrus recognition method based on the improved YOLOv3-LITE lightweight neural network. The method introduced the generalized Intersection over Union (GIoU) border regression loss function and used the MobileNet-v2 as the backbone network, with an average accuracy of 91.13%. Xiong et al. (2020) proposed a citrus detection network based on Des-YOLO v3, which effectively improved the problem of the missed detection of small targets, and the average detection accuracy of the algorithm was 90.75%. Kang and Chen (2020) proposed an apple detection model named LedNet and an automatic labeling tool. The recall and accuracy of the model were 82.1 and 85.3%, respectively. Yang et al. (2020) proposed an integrated system for citrus and branch detection and size estimation and used the Mask RCNN as the citrus fruit recognition model, with the average recognition accuracy of 88.15%. In summary, the mentioned researches mainly focused on mature fruits; however, green fruits are more difficult to detect because of the color similarity between these fruits and their leaves. Combining color with thermal information, Gan et al. (2018) adopted the Faster RCNN algorithm to identify green citrus fruits, with a recognition accuracy of 95.5%. Xiong et al. (2018) also used Faster RCNN to identify green citrus in natural environments, with an average accuracy of 85.49% on the test set. In Afonso et al. (2020), the Mask RCNN algorithm was used for the detection of tomatoes in images taken in a greenhouse, which detected objects and the pixels corresponding to each object. The above researches showed that, due to the strong feature extraction ability of deep convolution neural networks, fruit recognition studies have gradually shifted their focus to recognition methods based on deep learning.
In short, although many researchers have done extensive work on the detection of green citrus, the accuracy and robustness of most detection algorithms still need to be further improved due to the difficulties of green citrus detection already discussed. Compared with traditional machine learning methods, deep learning algorithms have greater advantages in terms of accuracy and real-time performance. However, few studies have been conducted on the use of deep learning methods to detect green citrus fruits in natural environments. At the same time, the resources that fruit-picking robots can use in the orchard are limited, so it is necessary to improve detection algorithms according to actual needs.
Therefore, based on the deep learning method, this study proposed a visual detection method of green citrus fruits in the natural environment, which can provide technical support for the intelligent picking of other green fruits. The main research work is presented as follows. (1) The green citrus images captured in the complex environment of citrus orchard were collected, classified, and enhanced. (2) Referring to the idea of a weighted bi-directional feature pyramid network (BiFPN), a green citrus detection network, YOLO BP, was proposed to improve algorithm accuracy and real-time performance based on the improvement and compression of the YOLO v4 detection algorithm. (3) The YOLO BP network was trained and three groups of comparative experiments were designed to evaluate the performance of the proposed method.
In this study, citrus images were acquired from the citrus orchard of Zengcheng, Guangdong, China. The citrus varieties were emperor citrus and tangerine citrus. The image acquisition experiments were carried out on November 11, 2016, January 8, 2017, and July 20, 2018. As shown as Figure 1, the shooting distance between camera and citrus trunk was between 1 and 2 m during image acquisition, and the citrus fruits are photographed from multiple angles. To meet the diversities of the dataset, a total of 890 green citrus images were taken at different time periods (9:30–17:00) and different light conditions (directional light and backlight) and saved in 24-bit color JPEG format.
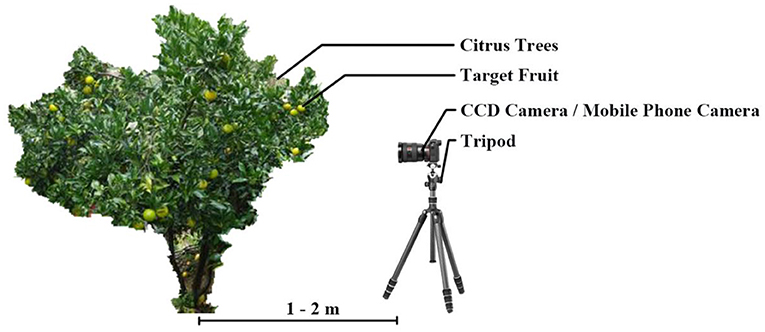
Figure 1. Visual system and image acquisition schematic diagram.
The image acquisition system mainly included three cameras, namely, Nikon (Tokyo, Japan), SONY (Tokyo, Japan), and Apple (Cupertino, CA, USA), with the specific parameters of each camera and the corresponding image number shown in Table 1.
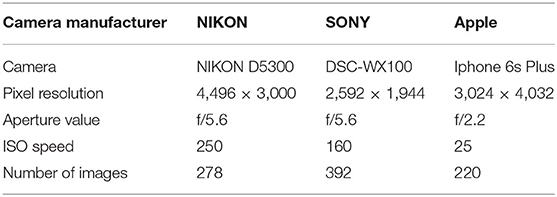
Table 1. Statistics of the camera parameters and image quantities.
As described in the Introduction, except for the color similarity between green citrus fruits and their backgrounds, there are many complex situations in the natural environment, such as light changes, shades of the branches and leaves, overlapping of fruits, changes in the number and size of fruits, etc.
To verify the average detection accuracy of green citrus fruits under the different conditions discussed using the algorithm, we defined and classified the citrus image set shown in Figure 2. The distribution of citrus fruits can be classified into single and multiple fruits, shown in Figures 2A,B. Figures 2C,D show different fruit illuminations, which can be divided into backlighting and front lighting. The cases of citrus fruits occluded by leaves or branches are shown as Figures 2E,F. In particular, if more than one-third of the fruit was occluded, it was called heavy occlusion (Figure 2F); otherwise, it was a slight occlusion (Figure 2E). Figure 2G shows the overlapping of multiple citrus fruits. In addition, citrus fruits are often presented in a combination of the mentioned conditions when they were in the actual orchard environment. Figure 2H contains four conditions, including multiple small-size fruits, backlighting, branch and leaf shading, and fruit overlapping. The classification and naming of the discussed cases are shown as Table 2.
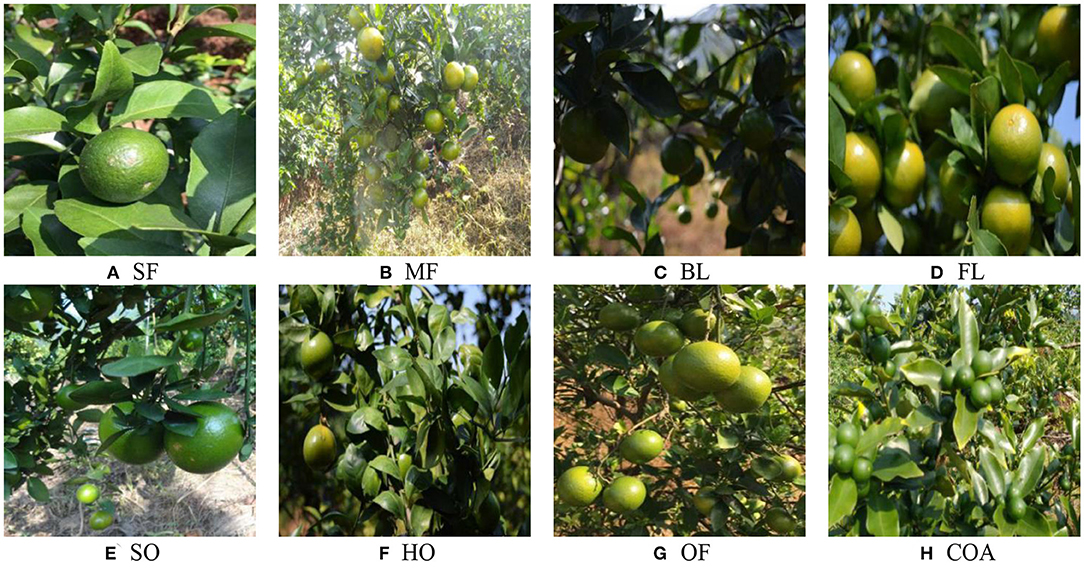
Figure 2. Classification and definition of different citrus scenes in natural environment.
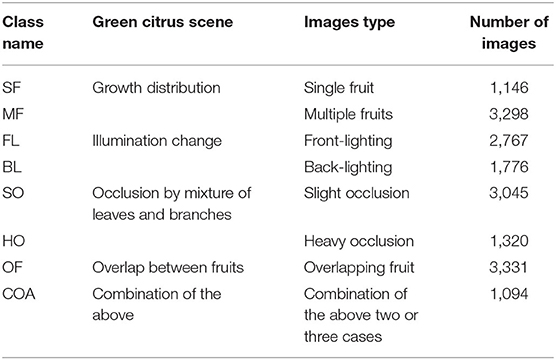
Table 2. Green citrus scene classifications and image quantities.
To improve the generalization ability of the detection algorithm, this study adopted four methods to enhance the data set, including rotation, horizontal inversion, adding Gaussian noise, and changing brightness. Then, we removed invalid images without fruits or blurs and counted the number of images of each citrus scene. The statistical results are shown in Table 2. Finally, the dataset was randomly divided into training, validation, and test sets according to the proportions 70, 15, and 15%, respectively.
The running environment included a desktop computer with Intel i7-10700 (2.9 GHz × 16) octa-core CPU, NVIDIA GeForce GTX 3090 GPU, and Ubuntu 16.04 64-bit systems. The software included CUDA 10.0.130, CUDNN 7.4.2, NVIDIA driver 410.78, Opencv 3.4.5, Deep Learning Framework-DarkNet, labelImg, spyder, and Anaconda 3.5.2.
Compared with other object detection methods [such as regional-based convolutional neural network (R-CNN) series (Ren et al., 2015; He et al., 2017; Liang et al., 2020)], YOLO v4 (Bochkovskiy et al., 2020) extracts features based on a regression method, with a single neural network being used to detect and classify input images without generating a large number of candidate windows in order to realize end-to-end object detection. The YOLO v4 algorithm can quickly predict and classify targets and ensure high accuracy simultaneously, so it is suitable for application in actual environments.
Shown as Figure 3, the YOLO v4 divides the input image into grids with a size of S× S (S=7). If the center of an object falls within a certain cell, the cell is responsible for detecting the object. The cell outputs multiple prediction boxes and their corresponding confidences, discards the prediction boxes with low confidences, and, finally, locates the citrus position by the non-maximum suppression algorithm (Lawal, 2021).
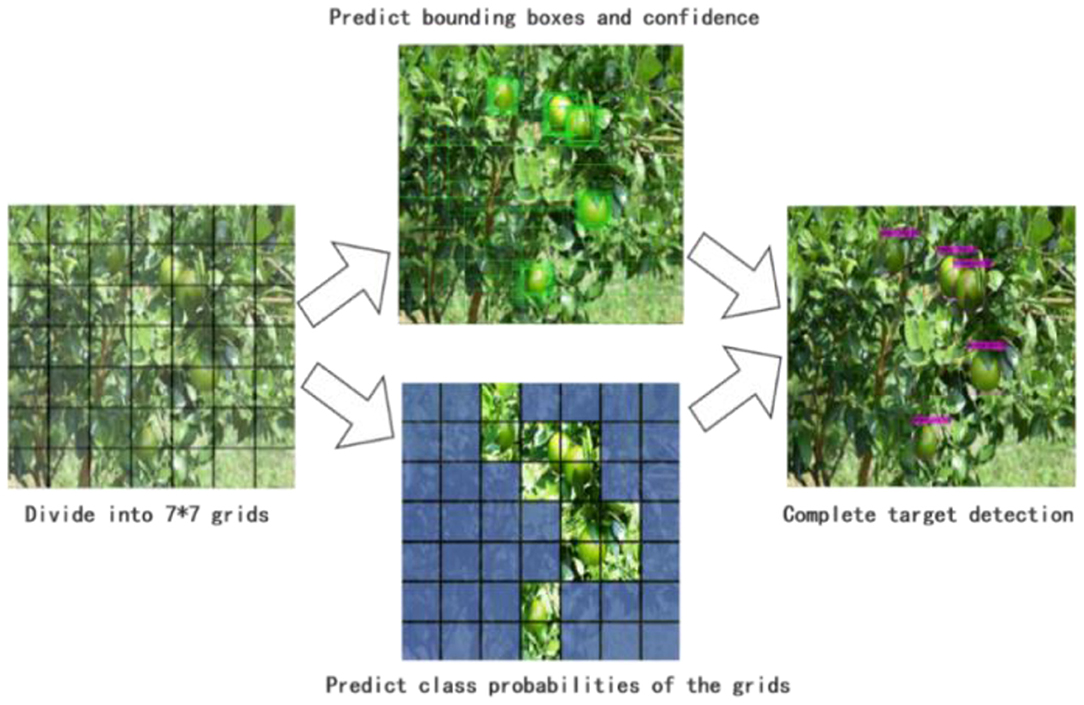
Figure 3. YOLO V4 detection network.
The YOLO v4 is the fourth version of the YOLO algorithm series. Its average precision (AP) and FPS achieved 43.5 and 65%, respectively, on the Microsoft Common Objects in Context (MS COCO) dataset, resulting in a better performance than the Faster R-CNN (Ren et al., 2015), SSD (Liu et al., 2016), EfficientDet (Tan et al., 2020), and other object detection algorithms. However, we found that YOLO v4 had some shortcomings during the experiment, such as the missed detection of overlapped foreground objects and the incorrect detection of background objects. Although the backbone of YOLO v4 performed well, at the same time, its network was too deep, which would result in huge computation. Therefore, based on the improvements of YOLO V4, this study proposed a green citrus detection network named YOLO BP, which effectively improved the accuracy and real-time performance of the detection algorithm.
In view of the difficult and challenging nature of green citrus detection in natural environments, the accuracy of the visual system of picking robots should be improved as much as possible on the premise of real-time algorithm performance. Compared with the lightweight and high-speed YOLO v4_Tiny algorithm, the YOLO v4_CSPDarknet53 pursues better performance while ensuring real-time performance. Thus, referring to the Cross Stage Partial Network (CSPNet) (Wang et al., 2019), the CSPDarknet53 was proposed on the basis of the improved Darknet53. Furthermore, as the layer depth increases, the network performance will quickly reach saturation or even begin to decline, slowing the network reasoning speed and, at the same time, increasing the computation cost. Therefore, after many instances of clippings and experimental verifications, the CSPDarknet56 was finally proposed as the feature extraction network of YOLO BP.
Shown as Figure 4, the feature extraction network CSPDarknet56 contains five CSP_Blocks, each with a 3*3 convolution kernel used for downsampling. Compared with the CSPDarknet53, which contains 72 convolutional layers, the CSPDarknet56 proposed in this study has the following two advantages: (1) 16 convolutional layers have been clipped and the deep network can extract high-quality semantic information more efficiently, realizing the reuse and fusion of multilayer characteristics; (2) the memory cost is reduced and the network becomes lightweight on the premise of a high detection accuracy, resulting in the effective improvement of detection speed.
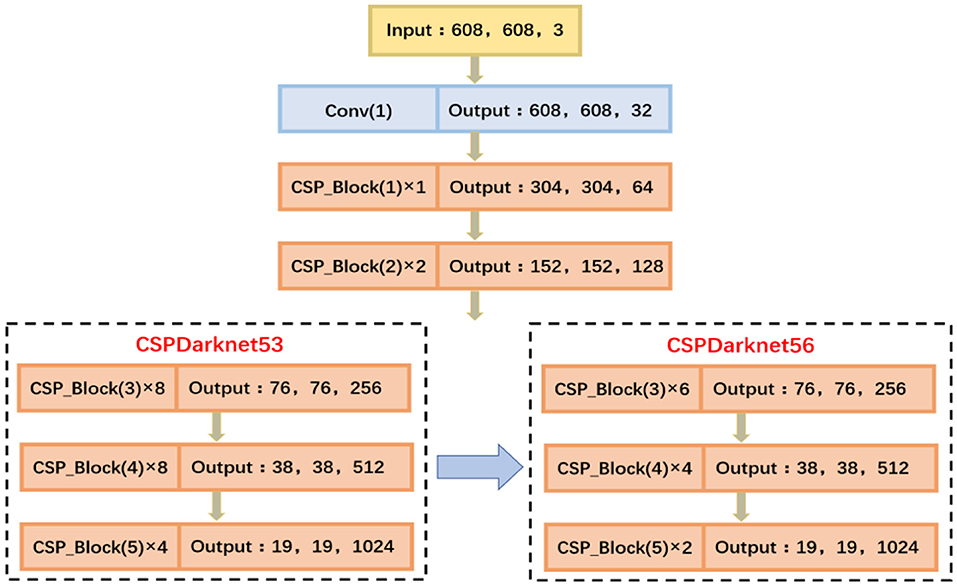
Figure 4. Feature extraction network.
In order to further improve the performance of the detection network, researchers usually add some convolutional layers between the feature extraction network and the output layer to better integrate features. To increase the receptive field to a greater extent, Spatial Pyramid Pooling Network (SPP-Net) (He et al., 2015) was added after the CSPDarknet53 of YOLO v4. The added network can effectively separate most of the significant context features and hardly affect the computing speed.
Shown as Figure 5, using convolution kernels with the sizes of {1*1, 5 * 5, 9 * 9, 13 * 13}, respectively, SPP-Net performs maximum pooling on the feature map obtained in the previous stage, and then aggregates all the feature maps through the concat layer.

Figure 5. Spatial Pyramid Pooling Network (SPP-Net).
In addition, PANet (Liu et al., 2018) was adopted as a parameter aggregation method in YOLO v4, shown as Figure 6A. Although PANet proves the effectiveness of two-way fusion, it ignores the possibility that the contributions of the different levels of features may be different. In order to reuse and fuse multilayer features more efficiently and get better detection performance, referring to the idea of a BiFPN network (Tan et al., 2020), this paper proposed a feature fusion network named Bi-PANet. The structure of Bi-PANet is shown as Figure 6B.
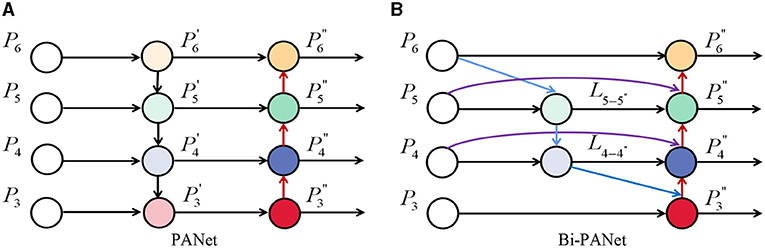
Figure 6. (A,B) Represent Path Aggregation Network (PANet) and bi-directional feature pyramid network (Bi-PANet).
Compared with PANet, Bi-PANet was improved as follows: (1) to reduce unnecessary cost of computations, the PANet was simplified by removing redundant nodes from both ends of the network, as P′3 and P′6, as shown in Figure 6A; (2) to strengthen the reuse and fusion of multilayer features, the extra edges from the original feature nodes to the output nodes were added as and , as shown in Figure 6B.
Through the improvements of the backbone and feature fusion network, this study proposed a green citrus detection network based on YOLO BP, shown as Figure 7. Firstly, the CSPDarknet56 was used to extract the features of the input images in the backbone network. By reusing CSP_Blocks, the features of the shallow convolution layer could better and faster transmit to the deep convolution layer, resulting in the whole network having high information transmission and gradient transmission efficiencies. Secondly, to improve the ability of the network to extract deep features, the SPP-Net was used to perform maximum pooling and aggregation with different scales on the feature map, with the ability improvement of the deep layer feature selection. Then, the Bi-PANet was used to perform upsampling and downsampling operations twice for each technique. It also spliced the corresponding feature maps in the network, achieving the effective reuse and fusion of features. Finally, the regression prediction was performed three times in the prediction network to realize the multi-scale detection of green citrus fruits with different sizes.
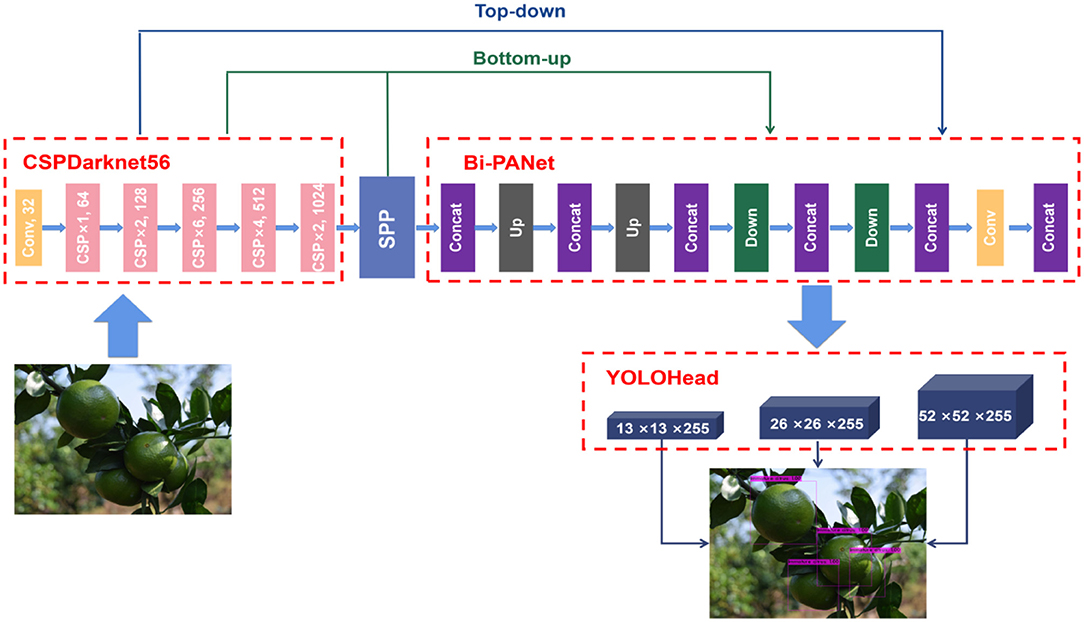
Figure 7. YOLO BP network architecture diagram.
The training setting and strategy are as follows:
(1) The hyper-parameters setting. The training steps were 20,000, the batch size was 64, and the momentum factor and weight decay were 0.949 and 0.0005, respectively. The step decay learning rate scheduling strategy was adopted with an initial learning rate of 0.001 and the learning rates of 0.0001 and 0.00001 at the steps 16,000 and 18,000, respectively.
(2) Training strategy. The weight parameters of the pre-trained network (yolov4.conv.137) were used for initialization. The multi-scale training strategy and mosaic data augmentation method were adopted to improve the robustness and accuracy of the network for images with different resolutions.
Figure 8 shows the change curves of the average loss and mAP values of the YOLO BP network during training. The network updated the loss function of the small sample batch, resulting in a gradual decrease of prediction loss deviation. When the network training steps exceeded 16,000, the loss value and mAP were basically stabilized with approximately 1 and 93%, respectively. From the point of parameter convergence, the result of the network training was satisfactory. Figure 9 shows the results of the detection of citrus fruits in various environments by the trained YOLO BP network.
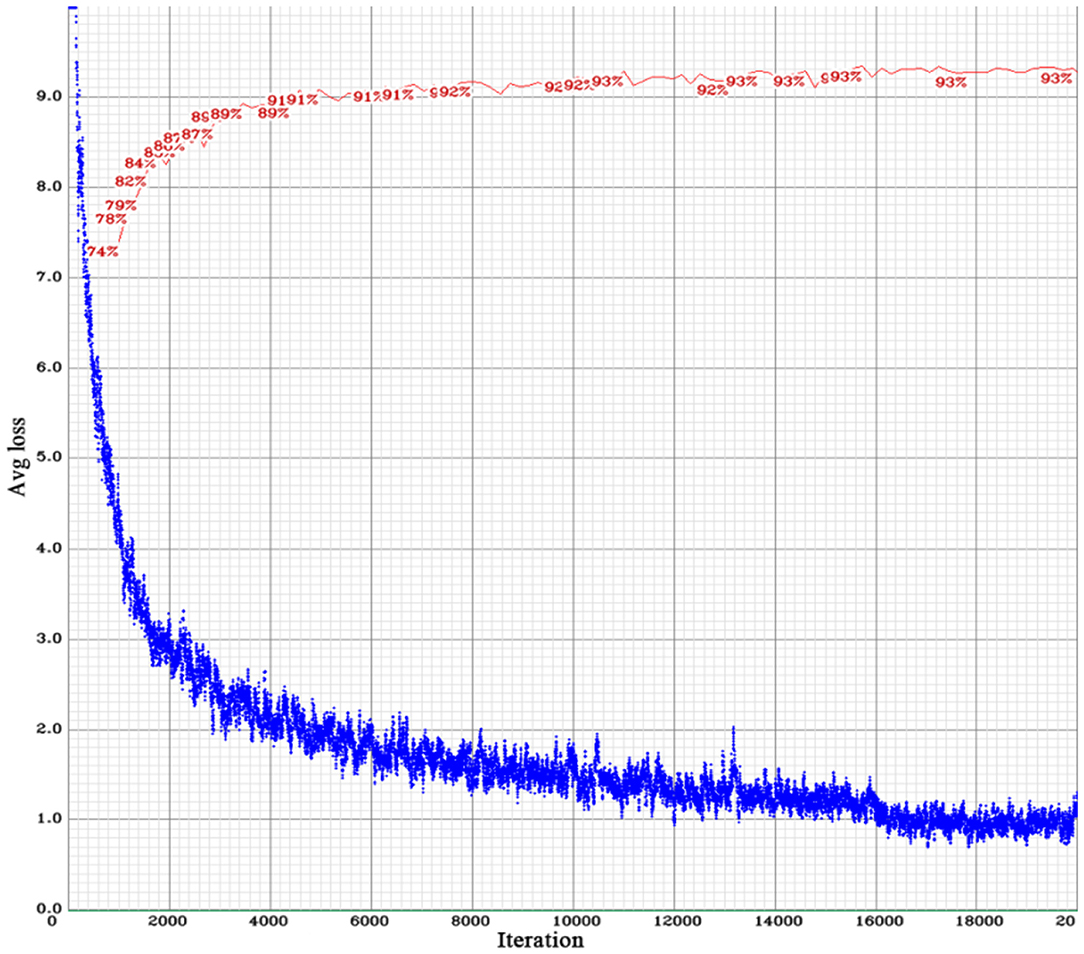
Figure 8. Curves of the loss function value and mean average precision (mAP) of YOLO BP network.
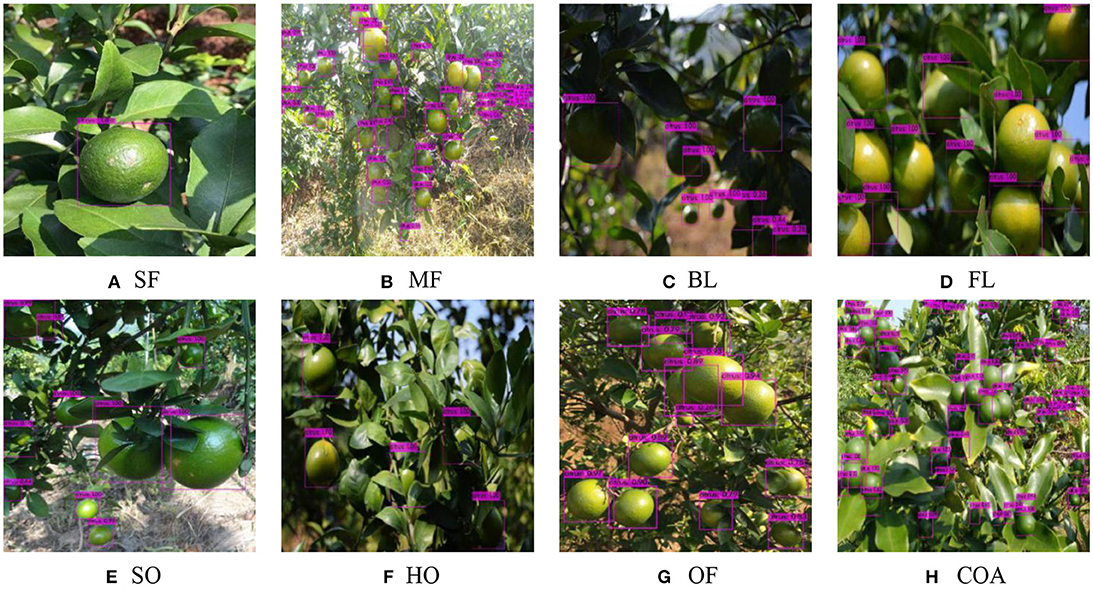
Figure 9. Green citrus fruit detection results under different conditions.
To verify the effectiveness of the proposed detection algorithm, three groups of performance comparison experiments for the green citrus recognition algorithm were designed in this study.
The precision (P), recall (R), and F1 score (F1) are defined as follows:
Where TP, FP, and FN are true positive, false positive, and false negative, respectively.
The performances of the detection algorithms were uneven in different situations. As shown in Figure 2A, the fruits are relatively clear, complete and easy to identify. However, with backlighting, the detection of small-size fruits, overlapping fruits, or fruits covered by branches and leaves would be more difficult, which is shown in Figure 2G. Therefore, the experiment designed in this section mainly focused on the detection performance of YOLO BP and YOLO v4 in complex scenarios. The test set included multiple fruits (MF), backlighting (BL), slight occlusion (SO), heavy occlusion (HO), overlapping fruits (OF), and the combination of the above (COA). The hyper-parameters setting and training strategy of the YOLO v4 network were consistent with those of YOLO BP network.
Figure 10 shows the detection results of the two algorithms. The missed and false detections are manually marked with yellow and red ellipses, respectively.
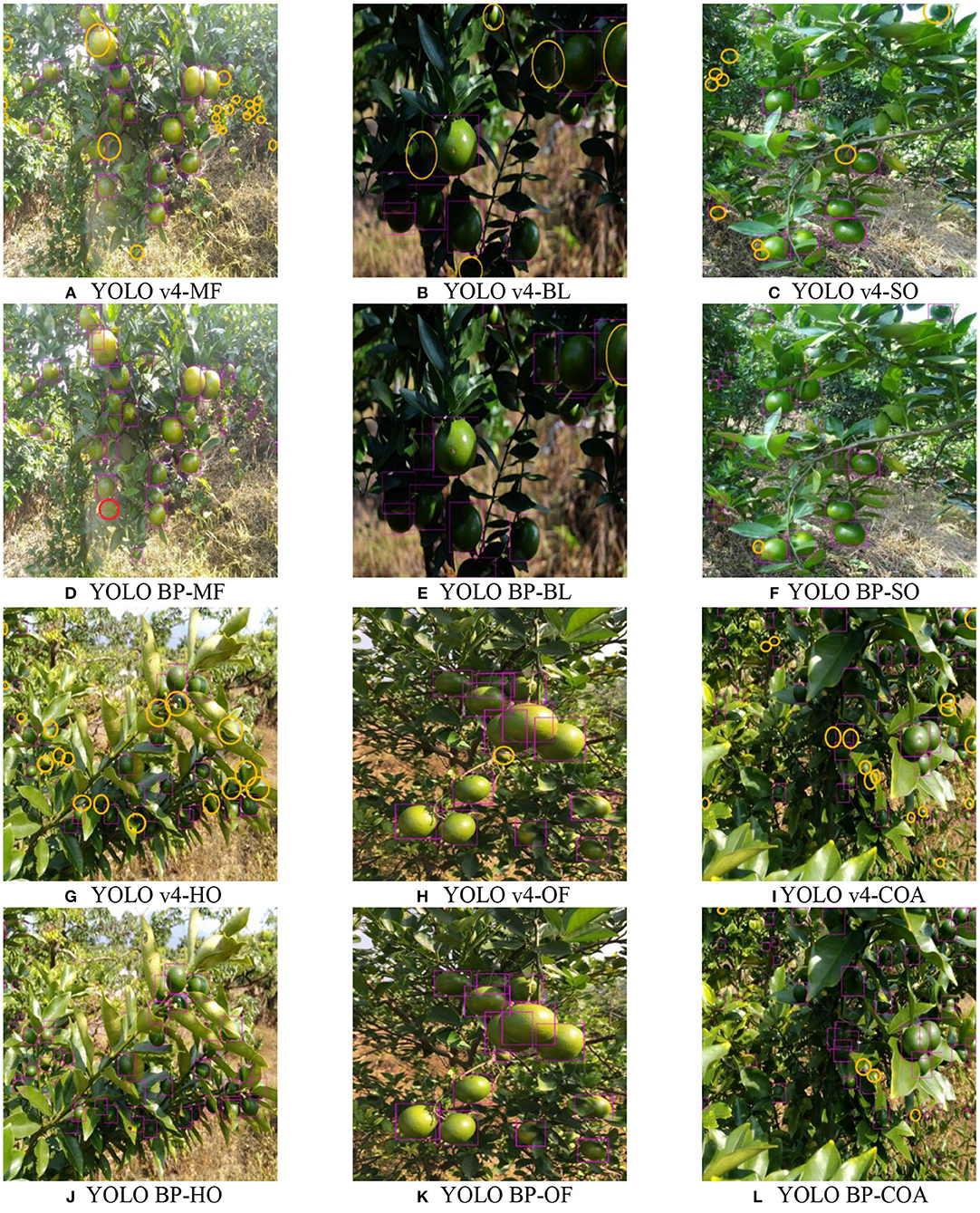
Figure 10. The comparison between the proposed method and the traditional YOLO v4. (A–C) and (G–I) are the detection results of the traditional YOLO v4. (D–F) and (J–L) are the detection results of YOLO BP.
As shown in Figure 10, both YOLO BP and YOLO v4 can detect complete, slightly occluded, or overlapping green citrus fruits. However, YOLO BP (e.g., Figures 10D,F,L) can overcome the defect of missing small objects that is present in YOLO v4 (e.g., Figures 10A,C,I). Compared with YOLO v4 (such as Figures 10B,I), YOLO BP (such as Figures 10E,L) can also better detect citrus fruits that overlapped or were occluded by leaves under the backlighting environment. In addition, compared with YOLO v4 (such as Figures 10G,I), YOLO BP (such as Figures 10J,L) can detect citrus fruits heavily occluded by branches and leaves with better robustness and accuracy. The experimental results showed that the overall performance of YOLO BP was better than YOLO v4.
Figure 11 and Table 3 show the comparison results of YOLO BP and YOLO v4 in six different complex citrus scenes. It can be seen that the accuracy, recall, mAP, F1 score, and average IoU of the YOLO BP recognition algorithm are higher than those of YOLO v4. Especially in the HO case, the mAP of YOLO BP was nearly 6% higher than that of YOLO v4. The experimental results showed that, in the six gradient test sets conducted, the average mAP, average IoU, and average F1 score of the YOLO BP reached 92.91 and 75.47% and 0.89, respectively, which were higher than the 88.57 and 69.5% and 0.85 of YOLO v4, indicating that YOLO BP has better detection effect.
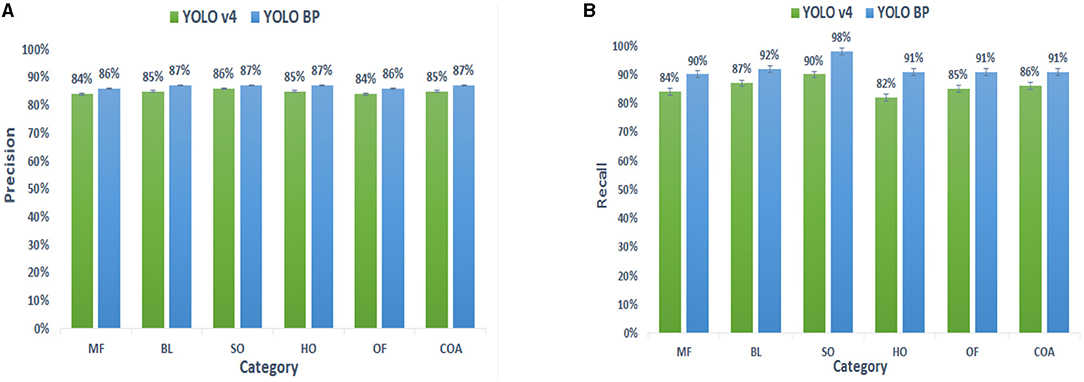
Figure 11. (A,B) Represents the comparison of precision and recall of YOLO BP and YOLO v4.

Table 3. YOLO v4 and YOLO BP performance comparison under different citrus situations.
To further evaluate the contributions of CSPDarknet56 and Bi-PANet, a group of comparative experiments of YOLO v4–CSPdarknet53, YOLO v4–CSPdarknet56, and YOLO BP were designed. The above three algorithms were used to detect the whole original test sets. The accuracy, recall, mAP, and FPS of the three algorithms were computed, shown as Table 4, and the precision and recall curves of the three algorithms were obtained, shown as Figure 12.

Table 4. Disentangling backbone and Bi-PANet—starting from the standard CSPDarknet (CSPDarknet53 + PANet), we first replace the backbone with CSPDarknet56 and then replace the baseline PANet with our proposed Bi-PANet.
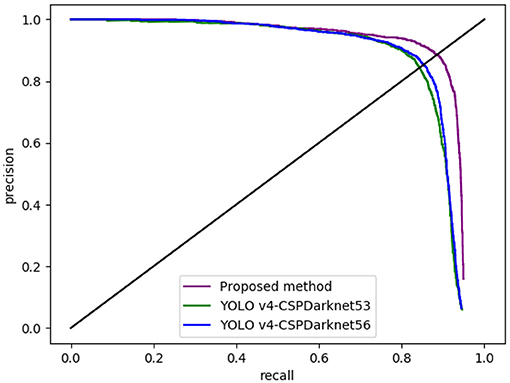
Figure 12. The comparison of precision and recall curves of the three algorithms.
Figure 12 shows that the precision-recall (PR) curve of the YOLO v4-CSPDarknet53 is under the PR curves of YOLO v4–CSPDarknet56 and YOLO BP, indicating that the performance of the latter two algorithms is better than YOLO v4–CSPDarknet53.
It can be seen from Table 4 that, compared with the original YOLO v4-CSPDarknet53, the mAP of YOLO v4-CSPDarknet56 is 88.16% and FPS effectively increased to 19 frames per second, showing that the improved feature extraction network contributed 0.91 percentage points of mAP and 2 frames of FPS. Compared with YOLO v4–CSPDarknet56, the mAP and FPS of the proposed method reached 91.55% and 18 frames, indicating that the improved feature-enhanced fusion network contributed 3.39% of mAP. The final results showed that, compared with YOLO v4, the mAP and FPS of YOLO BP were increased by 4.3% and 1 frame, respectively, indicating the higher detection speed and accuracy of the proposed method.
To further verify the performance of the proposed method, we also designed a comparative experiment of existing green citrus detection algorithms, namely, the DBBRF (He et al., 2020), Faster RCNN (Xiong et al., 2018), and the proposed algorithm. The average accuracy, F1 value, and execution time were the evaluation indicators, as shown in Table 5.
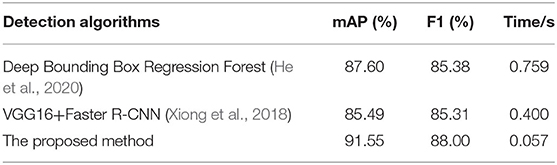
Table 5. Comparison of green citrus detection algorithms.
Firstly, by comparing the two existing methods in Table 5, we found that mAP and F1 of the DBBRF proposed by He et al. were 87.6 and 85.38%, respectively, which were higher than the 85.49 and 82.31% of Faster R-CNN, which was proposed by Xiong et al. However, the detection speed of the former was 0.759 s per frame, which was lower than the 0.4 s of the latter. Compared with the DBBRF and Faster R-CNN, the mAP, F1, and execution time of the proposed method were 91.55 and 88% and 0.057 s, respectively, showing a greater advantage in performance. The experimental results showed that the proposed detection algorithm for green citrus has strong robustness and high accuracy in the complex orchard environment, which provides technical support for green fruit detection in natural environments.
Compared with the original algorithm YOLO v4 (one-stage detection network), it can be seen from Figure 11 and Table 3 that the accuracy, recall, map, F1 score, and average IOU of YOLO BP are higher than YOLO v4. The main reasons are as follows: (1) the backbone network (CSPDarknet56) was proposed, which could extract higher quality features; (2) a bi-directional feature pyramid network (Bi-PANet) was proposed by removing the redundant nodes of PANet and adding additional connections, which could enhance the robustness of small-size and overlapping fruit detection effectively. Moreover, from the PR curve (Figure 12) and Table 4, we can observe that CSPDarknet56 and Bi-PANet proposed in this study both contribute to the improvement of network detection performance, indicating the feasibility and effectiveness of our method.
Compared with the DBBRF proposed by He et al. (2020) and Faster R-CNN (two-stage detection network) proposed by Xiong et al. (2018), it can be seen from Table 5 that YOLO BP has high accuracy and real-time performance in complex environments. Analyzing the experimental results, we found that the good performance of YOLO BP benefitted from the following aspects: (1) the strong feature extraction network and feature enhancement and the fusion network; (2) the real-time advantage of the deep learning algorithm (especially the one-stage method). The experimental results showed that the proposed method had a greater advantage in performance, meeting the accuracy and real-time requirements of picking robots.
Although the proposed method had strong robustness and high accuracy in the complex orchard environment, there were also some shortcomings, as shown in Figure 10. By analyzing the results of the comparative experiments, the main possible reasons affecting the detection accuracy were concluded as follows; (1) leaves with similar color and shape to citrus were easily mis-detected as citrus, shown as the red ellipse mark in Figure 10D; (2) in the backlight environment, multiple fruits with severe overlap were easily identified as one fruit, shown as the yellow ellipse mark in Figure 10E; (3) some citrus fruits in the image were too small and occluded by branches and leaves at the same time, which led to missed detections, shown as the yellow ellipse marks in Figure 10L.
In this study, we proposed a multi-scale convolutional neural network named YOLO BP to detect green citrus fruits in natural environments. First, we carried out image acquisition experiments of green citrus fruits and classified data sets. Second, four methods were implemented to enhance the citrus image set. Moreover, we improved the structure of the YOLO V4 framework and made progress on the detection of green citrus in complex scenarios. Finally, by conducting three groups of comparison experiments, the proposed method was proven to achieve better recall and accuracy.
In conclusion, the proposed method provided a new visual recognition idea for fruit-picking robots and fruit-picking unmanned aerial vehicles (UAVs). Although this research made some progress, there are still some issues to be improved upon, such as the deficiency of the proposed method mentioned at the end of discussion, which is the necessary manual labeling and lack of samples. For further research, we will focus on solving these problems in order to better apply deep learning methods to the visual detection methods of picking robots.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
All authors contributed to the conception and design of the study, dataset generation, model training and testing, analysis of results, and the drafting, revising, and approving of the contents of the manuscript.
This research was funded by National Natural Science Foundation of China (No. 32071912), Science and Technology Program of Guangzhou (202002030423), Guangzhou Key Laboratory of Intelligent Agriculture (201902010081), the High-level talents scientific research start-up fund project of Guangdong Mechanical and Electrical Polytechnic (Gccrcxm-201904), and the Special Funds for the Cultivation of Guangdong College Students' Scientific and Technological Innovation (Climbing Program Special Funds) (pdjh2021a0070).
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Afonso, M., Fonteijn, H., Fiorentin, F., Lensink, D., Mooij, M., Faber, N., Polder, G., and Wehrens, R. (2020). Tomato fruit detection and counting in greenhouses using deep learning. Front. Plant Sci. 11:1759. doi: 10.3389/fpls.2020.571299
Bochkovskiy, A., Wang, C., and Liao, H. (2020). YOLOv4: optimal speed and accuracy of object detection. arXiv:2004109342020 [cs.CV].
Gan, H., Lee, W., and V. Alchanatis, B. (2018). Immature green citrus fruit detection using color and thermal images. Comput. Electron. Agric. 152, 117–125. doi: 10.1016/j.compag.2018.07.011
He, K., Gkioxari, G., and Dollár, P. (2017). “Mask r-cnn,” in Proceedings of the IEEE International Conference on Computer Vision (New York, NY: IEEE), 2961–2969.
He, K., Zhang, X., and Ren, S. (2015). Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 37, 1904–1916. doi: 10.1007/978-3-319-10578-9_23
He, Z., Xiong, J., and Chen, S. (2020). A method of green citrus detection based on a deep bounding box regression forest. Biosyst. Eng. 193, 206–215. doi: 10.1016/j.biosystemseng.2020.03.001
Kamilaris, A., and Prenafeta-Boldu, F. X. (2018). Deep learning in agriculture: a survey. Comput. Electron. Agric. 147, 70–90. doi: 10.1016/j.compag.2018.02.016
Kang, H., and Chen, C. (2020). Fast implementation of real-time fruit detection in apple orchards using deep learning. Comput. Electron. Agric. 168:105108. doi: 10.1016/j.compag.2019.105108
Kurtulmus, F., Lee, W., and Vardar, A. (2011). Green citrus detection using “eigenfruit”, color and circular gabor texture features under natural outdoor conditions. Comput. Electron. Agric. 78, 140–149. doi: 10.1016/j.compag.2011.07.001
Lawal, O. M. (2021). YOLOMuskmelon: quest for fruit detection speed and accuracy using deep learning. IEEE ACCESS. 9, 2169–3536. doi: 10.1109/ACCESS.2021.3053167
Liang, C., Xiong, J., and Zheng, Z. (2020). A visual detection method for nighttime litchi fruits and fruiting stems. Comput. Electron. Agric. 169, 168–1699. doi: 10.1016/j.compag.2019.105192
Liu, S., Qi, L., and Qin, H. (2018). “Path aggregation network for instance segmentation,” in Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (Salt Lake City: IEEE), 8759-8768.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C. Y., et al. (2016). “SSD: single shot multibox detector,” in European Conference on Computer Vision (Cham: Springer), 21–37.
Liu, Y., Liu, S., and Liu, C. (2019). Segmentation and reconstruction of overlapped citrus without blocking by branches and leaves. Jiangsu J. Agric. Sci. 35, 1441–1449. doi: 10.3389/feart.2021.661684
Lu, J., and Hu, X. (2017). Detecting green citrus fruit on trees in low light and complex background based on MSER and HCA. Trans. Chinese Soc. Agric. Eng. 33, 196–201. doi: 10.1109/ACCESS.2019.2951473
Lu, J., Lee, W., and Gan, H. (2018). Immature citrus fruit detection based on local binary pattern feature and hierarchical contour analysis. Biosyst. Eng. 117, 78-90. doi: 10.1016/j.biosystemseng.2018.04.009
Lv, S., Lu, S., and Li, Z. (2019). Orange recognition method using improved YOLOv3-LITE lightweight neural network. Trans. Chinese Soc. Agric. Eng. 35, 205–214. doi: 10.1038/s41598-021-81216-5
Okamoto, H., and Lee, W. (2009). Green citrus detection using hyperspectral imaging. Comput. Electron. Agric. 66, 201–208. doi: 10.1016/j.compag.2009.02.004
Peng, H., Huang, B., and Shao, Y. (2018). General improved SSD model for picking object recognition of multiple fruits in natural environment. Trans. Chinese Soc. Agric. Eng. 34, 155–162. doi: 10.11975/j.issn.1002-6819.2018.16.020
Ren, S., He, K., Girshick, R., and Sun, J. (2015). “Faster r-cnn: towards real-time object detection with region proposal networks,” in Advances in Neural Information Processing Systems (New York, NY: Curran Associates), 91–99.
Sengupta, S., and Lee, W. (2014). Identification and determination of the number of immature green citrus fruit in a canopy under different ambient light conditions. Biosyst. Eng. 117, 51–61. doi: 10.1016/j.biosystemseng.2013.07.007
Tan, M., Pang, R., and Le, Q. (2020). EfficientDet: scalable and efficient object detection. arXiv:1911.09070 [cs.CV]. doi: 10.org/abs/1911.09070v7
Torres, I., Sánchez, M., and Cho, B. (2019). Setting up a methodology to distinguish between green oranges and leaves using hyperspectral imaging. Comput. Electron. Agric. 167, 0168–1699. doi: 10.1016/j.compeleceng.2019.03.017
Wang, C., Lee, W., and Zou, X. (2018). Detection and counting of immature green citrus fruit based on the Local Binary Patterns(LBP) feature using illumination-normalized images. Precis Agric. 19, 1062–1083. doi: 10.1007/s11119-018-9574-5
Wang, C., Liao, H., and Yeh, T. (2019). CSPNET: a new backbone that can enhance learning capability of CNN 2019. arXiv:1911.11929 [cs.CV]. doi: 10.org/pdf/1911.11929
Xiong, J., Liu, Z., and Tang, L. (2018). Visual detection technology of green citrus under Natural Environment. Trans. Chinese Soc. Agric. Mach. 49, 45–52. doi: 10.6041/j.issn.1000-1298.2018.04.005
Xiong, J., Zheng, Z., and Liang, J. (2020). Citrus detection method in night environment based on improved YOLO v3 Network. Trans. Chinese Soc. Agric. Mach. 51, 199–206. doi: 10.6041/j.issn.1000-1298.2020.04.023
Yang, C., Xiong, L., and Wang, Z. (2020). Integrated detection of citrus fruits and branches using a convolutional neural network. Comput. Electron. Agric. 174:105469. doi: 10.1016/j.compag.2020.105469
Keywords: deep learning, green citrus, YOLO v4, agricultural harvesting robotic, object detection
Citation: Zheng Z, Xiong J, Lin H, Han Y, Sun B, Xie Z, Yang Z and Wang C (2021) A Method of Green Citrus Detection in Natural Environments Using a Deep Convolutional Neural Network. Front. Plant Sci. 12:705737. doi: 10.3389/fpls.2021.705737
Received: 06 May 2021; Accepted: 09 August 2021;
Published: 07 September 2021.
Edited by:
Nicola D'Ascenzo, Huazhong University of Science and Technology, ChinaReviewed by:
Loris Nanni, University of Padua, ItalyCopyright © 2021 Zheng, Xiong, Lin, Han, Sun, Xie, Yang and Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Juntao Xiong, eGlvbmdqdEBzY2F1LmVkdS5jbg==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.