 Charles Verdonk
Charles Verdonk Marion Trousselard
Marion Trousselard Takfarinas Medani
Takfarinas Medani François Vialatte2
François Vialatte2 Gérard Dreyfus
Gérard Dreyfus
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Physiol. , 02 September 2022
Sec. Computational Physiology and Medicine
Volume 13 - 2022 | https://doi.org/10.3389/fphys.2022.915134
This article is part of the Research Topic Understanding the Dynamics of Physiological Systems Based on Biological Signals Triggered by Internal and External Stimuli: From Analysis to Application View all 5 articles
Enhanced body awareness has been suggested as one of the cognitive mechanisms that characterize mindfulness. Yet neuroscience literature still lacks strong empirical evidence to support this claim. Body awareness contributes to postural control during quiet standing; in particular, it may be argued that body awareness is more strongly engaged when standing quietly with eyes closed, because only body cues are available, than with eyes open. Under these theoretical assumptions, we recorded the postural signals of 156 healthy participants during quiet standing in Eyes closed (EC) and Eyes open (EO) conditions. In addition, each participant completed the Freiburg Mindfulness Inventory, and his/her mindfulness score was computed. Following a well-established machine learning methodology, we designed two numerical models per condition: one regression model intended to estimate the mindfulness score of each participant from his/her postural signals, and one classifier intended to assign each participant to one of the classes “Mindful” or “Non-mindful.” We show that the two models designed from EC data are much more successful in their regression and classification tasks than the two models designed from EO data. We argue that these findings provide the first physiological evidence that contributes to support the enhanced body awareness hypothesis in mindfulness.
Enhanced body awareness has been suggested as a cognitive mechanism through which mindfulness may improve health and well-being (Hölzel et al., 2011; Gu et al., 2015; Verdonk et al., 2020). Yet objective evidence, including physiological data, to support this hypothesis remains weak [for a review, see (Treves et al., 2019)]. Body awareness may be operationalized as the individual ability to feel engaged by information coming from the body and noticing subtle changes therein (Mehling et al., 2009). Proprioception, which refers to internal representation of the body in relation to space and movement, results from the cerebral integration of visual information and bodily signals that originate from within vestibular and somatosensory systems (Forbes et al., 2018; Tuthill and Azim, 2018). In the present study, the posture was investigated as a potential proxy for enhanced proprioception in trait mindfulness.
Previous work has reported mixed evidence for the association between mindfulness and measures of posture. Of note, here the term “mindfulness” includes dispositional trait (i.e., an ability to be mindful in daily life without any practice of mindfulness) and mindfulness intervention. Two studies reported that mindfulness, including mindfulness intervention and dispositional trait mindfulness, was associated with more stable postural balance (Mills and Allen, 2000; Rosenstreich et al., 2018). One study showed that a very brief mindfulness induction (6 min) does not significantly affect postural balance (Kee et al., 2012). Interestingly, mindfulness is also characterized by enhanced self-regulation of attention (Hölzel et al., 2011; Verdonk et al., 2020), which primarily involves attentional focus on bodily signals [specifically the breath (Lutz et al., 2015)]. In the literature, the contribution of attention to postural balance is supported by the association between poorer attention domain, as experimentally induced by the dual-task paradigm, and postural imbalance [for a review, see (Amboni et al., 2013)]. A few studies have shown that internal-focused attention induced by experimental instructions influences some measures of posture but not all (Vuillerme and Nafati, 2007; Rhea et al., 2019). It should be noted that the aforementioned studies mostly investigated a relatively small number of postural measures, thus suggesting that potential effects of mindfulness and attention on postural measures remain largely unknown.
Our work is grounded in the global neural workspace theory suggesting that conscious perception involves top-down attentional amplification, which amplifies sensory information and allows its integration into the current, conscious context where it becomes available to other neural processes [for a review of the global neural workspace theory, see (Dehaene and Changeux, 2011)]. Given that mindfulness is characterized by enhanced attentional skills (notably the self-regulation of attention) (Hölzel et al., 2011), we suggest that mindfulness could support the top-down process of attentional amplification, which in turn could facilitate the conscious processing of sensory information, including bodily signals (Verdonk et al., 2020). In other words, mindfulness could help overcome the situation in which information from the body remains unconscious by facilitating conscious access to this information, thus ultimately leading to enhanced body awareness. Regarding the posture, control processes mostly operate unconsciously but individuals may be aware of action of postural balance and can volitionally control it when desired (Amboni et al., 2013; Forbes et al., 2018). In the present study, we assume that body awareness could be particularly important in standing posture as the control of spontaneous, postural oscillations requires tracking low-intensity bodily changes (Fitzpatrick and McCloskey, 1994; Forbes et al., 2018) (see Supplementary Material, section The biomechanical modeling framework of standing posture, for a description of the biomechanical framework of standing posture). In addition, we assume that body awareness is more strongly engaged in postural control when individuals are keeping their eyes closed during standing. Indeed, in such a condition, sensitive pathways of postural control loop only involve bodily signals from the vestibular and somatosensory systems, and cannot benefit from visual information.
In practice, static posturography is a simple and affordable technique to objectively and quantitatively assess postural control (Visser et al., 2008; Błaszczyk, 2016) (see Supplementary Material, section The biomechanical modeling framework of standing posture, for an illustrated description of static posturography). The first challenge researchers face when investigating the posture using posturography is the large number of features (more than 70) that can be extracted from the postural signal (in the time and frequency domains). Interestingly, 16 of these postural features have been characterized as individual-specific: they show both low within-subject variability and high between-subjects variability, and they contribute to discriminate every individual postural pattern when analysed with the stepwise method (Yamamoto et al., 2015). Given the trait mindfulness conceived as a personality-like trait refers to individual differences in characteristic patterns (Brown and Ryan, 2003; Tang et al., 2016), we assumed in the present work that these 16 individual-specific postural features could be of particular interest to investigate the relationship between the posture and the trait mindfulness. The second challenge is that the relation between physiological and psychological phenomena is inherently nonlinear (Cacioppo and Tassinary, 1990). To address these two challenges, we searched for machine learning based models that could estimate the trait mindfulness (response variable) from a set of input variables consisting of the postural features and pairwise products thereof (see the Method, section Model design, subsection Cross-term computation for a detailed description).
A machine learning based model is a mathematical, parameterized relation between a set of input variables and one response variable. From a theoretical standpoint, a stochastic model is postulated in the form y = f (θ, x) + ε, where θ is the vector of parameters of the model, x is the vector of variables, and ε is a random variable, usually with zero mean, which is supposed to model all sources of noise or disturbances in the process that generates the observed quantity y. f (usually called regression function) is a parameterized function belonging to a family of functions selected by the designer; if prior knowledge suggests that the process that generates y from x is multilinear, then f is chosen to be a multilinear function. If no prior knowledge is available, the regression function f is chosen in the family of universal nonlinear approximators such as polynomials or neural networks. The family of the regression function having been selected, the purpose of regression is the following: given a set of observations of x and y, estimate, by an algorithmic process called “training”, the numerical values
The models described in the present article were designed using a well-established methodology of machine learning, which comprises three main steps: (i) among the candidate variables derived from the individual-specific postural features, selection of the input variables that are relevant to account for the trait mindfulness, (ii) selection of the model that has the optimal complexity given the available data, and (iii) estimation of the generalization ability of the selected model.
In the present work, we tested the enhanced body awareness hypothesis in trait mindfulness by first examining whether one can find, by machine learning, a deterministic relation between trait mindfulness and posture. To this end, we tested whether the self-reported trait mindfulness could be estimated successfully from the postural signal, given the data available from a sample of 156 subjects. The existence of such a model would demonstrate the existence of a deterministic relation between trait mindfulness and posture. Secondly, we explored how the relationship between trait mindfulness and posture is affected by the experimental conditions. The postural signal was recorded in two conditions: the participants were instructed either to stand quietly while keeping their eyes open (EO condition), or to stand quietly while keeping their eyes closed (EC condition). As mentioned above, we assume that body awareness is more strongly engaged in postural control in the EC condition than in the EO condition, because only bodily signals (from vestibular and somatosensory systems) are available in the former condition, while the latter condition also involves visual information. Therefore, exhibiting a model designed from data collected in EC condition that estimates self-reported trait mindfulness from postural signal more accurately than a model designed from data collected in EO condition (all other things being equal), would provide support for the enhanced body awareness hypothesis in mindfulness.
One hundred and eighty-one healthy volunteer participants were initially recruited from three different units of the French Army: 111 participants belonged to the Ecole des fusiliers marins et commandos of the French Navy (EFMC, Lorient, France), 46 participants belonged to submarine crews from the French Navy (SC, Brest, France), and 24 participants belonged to the French armed forces biomedical research institute (IRBA, Brétigny-sur-Orge, France). Unlike the first two units (EFMC and SC) that included active-duty military service members only, participants from the IRBA unit were mainly (70%) civilian personnel of the French Army Ministry. The only criterion for inclusion was age (between 18 and 60 years). All participants reported no medication and no history of somatic disorders. After completion of the experiments, data related to 25 participants were discarded: four of them due to equipment failures, and 21 of them due to issues concerning identification either of participant or of experimental condition. Data from the remaining 156 participants (mean age: 26 years old, SD: 8.7; 138 males – 88%) were analyzed.
Data were collected at the three unit sites, independently of any military operation or training. After reviewing the study description, participants provided written informed consent. Then, they completed the Freiburg Mindfulness Inventory (FMI) as self-report questionnaire of dispositional trait mindfulness (Walach et al., 2006; Trousselard et al., 2010). Finally, the postural signal was collected using the FEETEST 6 platform (TECHNO CONCEPT®, France) in two conditions: eyes open (EO condition) and eyes closed (EC condition). Due to technical specifications of the FEETEST 6 platform, each sequence lasted 52 s. The participants were instructed to stand quietly with their arms hanging at their sides and head in a normal forward-facing position, while focusing on a stationary target located at eye level approximately 2 m away (in the EO condition).
A subset of the data (the training/validation set) was used for designing and selecting the models; it included 70% of the available data (109 subjects). The performances of the selected models were assessed with the remaining 30% of the data (the test set, 47 subjects). This guarantees that performance assessment is carried out on data that are completely independent of the data used for training and selecting the models (Figure 1).
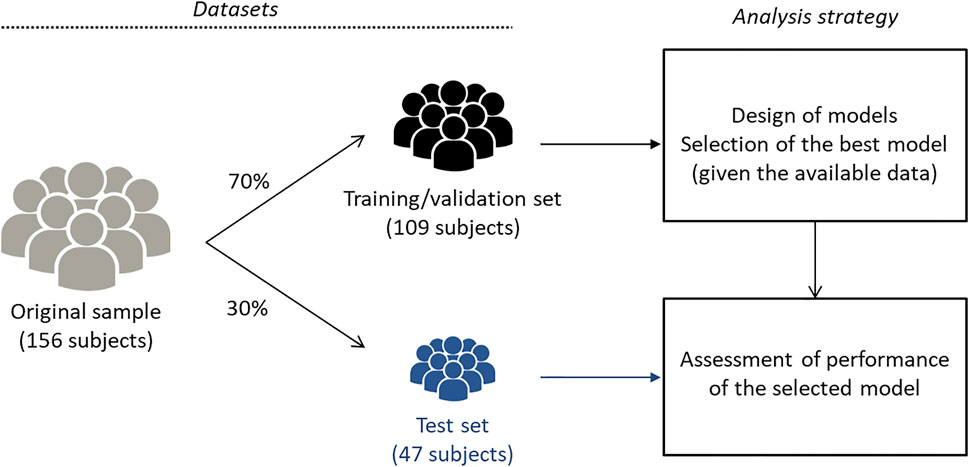
FIGURE 1. Flowchart of datasets and analysis strategy. The original sample included data from 156 participants. Models of different complexities were designed, and the best model (given the available data) was selected by leave-one-out cross-validation with the training/validation set, a subset of the original sample including 70% of the available examples (109 subjects). The performance of the selected models was assessed on the remaining 30% of the available examples (47 subjects). Thus, model training and selection were exclusively based on the training/validation set, while the assessment of the performance of the selected models was performed on a disjoint data set.
The 14-item FMI assesses dispositional trait mindfulness by indexing facets of Presence (i.e., being aware of all experiences in the present moment) and Non-judgemental acceptance (i.e., understanding that things are not necessarily how one wishes them to be). This questionnaire is semantically independent of a meditation context and it is applicable to all population groups, in particular to those with no practice of mindfulness training.
The questionnaire is scored using a four-point scale, with responses ranging from 1 (rarely) to 4 (almost always). A total mindfulness score was computed by adding the rating for all items, except for the 13th item that was reversely scored (Walach et al., 2006; Trousselard et al., 2010). The scale demonstrated acceptable levels of internal consistency in our sample (Cronbach’s α = 0.80). The total score of FMI was an integer quantitative variable, ranging from 14 to 56.
The FEETEST 6 (TECHNO CONCEPT®, France) includes four small independent platforms that measure the positions of the vertical ground reaction vector under the heel and the metatarsal, for each foot separately. Each of the four measurements is performed by three strain gauges with integrated rigid diaphragm positioned in a triangle facing heels and metatarsals. By averaging the positions of all the four vectors along antero-posterior and medio-lateral axes, the position of the Center of Pressure (CoP) of the whole body is computed. In other words, the CoP is the point of application of the vertical ground reaction force that is the sum of pressures acting on the part of the body in contact with the ground. During the recording, data were sampled at 40 Hz and information were transmitted to the data collection software (POSTUREWIN 4©) via a USB connection.
Postural data were first low-pass filtered with 10 Hz cut-off frequency using a fourth-order zero-phase-lag Butterworth filter. The values of the 16 individual-specific postural features were computed (Table 1; see Supplementary Material, section Computation of postural features, for the detailed computation of the postural features). In order to ensure that all features have the same order of magnitude, they were subsequently “z-score normalized” by subtracting their means and dividing by their standard deviation, so that each normalized feature had zero mean and unit standard deviation over the whole set of participants.
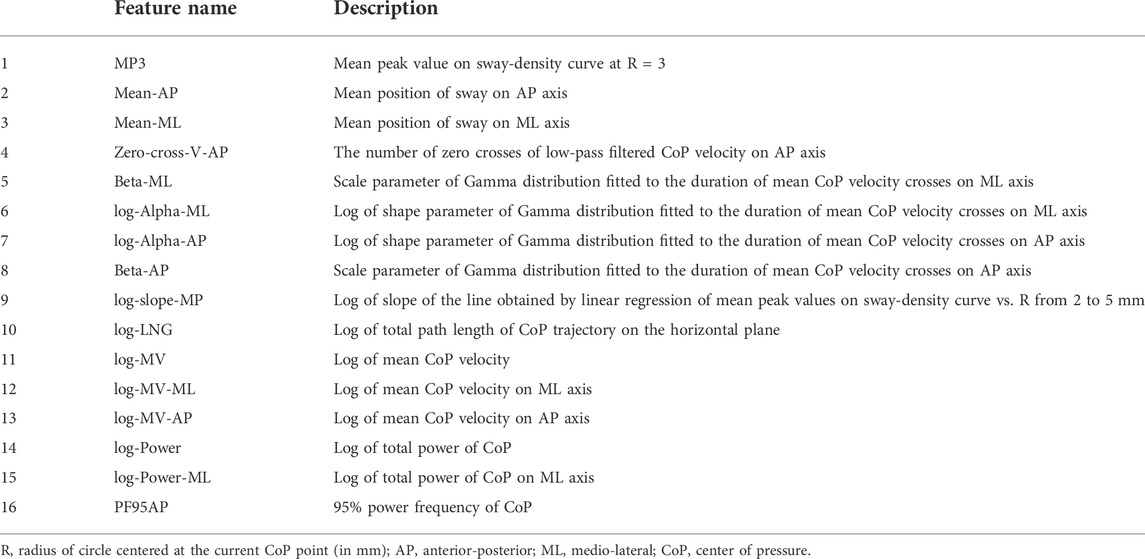
TABLE 1. The list of the 16 features that were extracted from the postural signal to characterize time-series of the center of pressure. A detailed description of the postural features, including their computation and their descriptive statistics, is provided in Supplementary Material (see Section Computation of postural features and Supplementary Table S1).
The problem that we addressed was to find a deterministic relation, if any, between the postural signal and the trait mindfulness. To this end, we implemented two approaches for data analysis that need to be viewed as complementary: (1) a regression approach where the FMI score, as a quantitative variable, was predicted from the posture variables; and (2) a classification approach where the mindfulness status of subjects (“mindful” or “non-mindful”), as a categorical variable, was predicted from the posture variables. The mindfulness status was computed from the FMI score at the individual level using the group median as threshold: a subject was considered mindful if his/her total FMI score was larger than the median value reported in our original sample (
Multilinear regression and logistic regression were first performed because they are the simplest linear models for addressing regression and classification problems, respectively.
In addition to linear models, we used Neural Networks (NN) for addressing regression and classification problems (see Supplementary Material, section Linear and nonlinear models, for a detailed presentation of the machine learning techniques that were used, with emphasis on the NN model). NN models are a very popular family of universal nonlinear approximators that, when suitably designed, are particularly efficient for modeling nonlinear relationships, such as the relations between physiological and psychological phenomena (Cacioppo and Tassinary, 1990).
As mentioned above, our purpose was to investigate whether it could be possible to find a machine-learning based model that could estimate, as accurately as possible, the trait mindfulness from the postural features, given the available experimental data. This problem was addressed in two steps: (1) among the candidate variables (postural features and pairwise products thereof), selection of the most relevant variables to estimate the trait mindfulness, and (2) selection of the model complexity that provides the best generalization ability, given the data used for training/validation. After variable and model selection, the performance of each selected model (regression model or classifier) was estimated on a separate dataset (the test set), disjoint from the training/validation set.
All steps described below were performed using Matlab 2018b (The Mathworks®), including the Statistics and Machine Learning toolbox, the Deep Learning toolbox and custom scripts.
The purpose of variable selection is to identify irrelevant and/or redundant input variables that should be removed from the available data before designing models, in order to prevent overfitting (Guyon and Elisseeff, 2003).
The method used for selecting the appropriate set of variables for estimating the response variable of interest (either FMI score or mindfulness status) comprises three steps: (1) computing the candidate variables (postural features and pairwise products thereof), (2) ranking them in order of decreasing relevance to the response variable using the Orthogonal Forward Regression (OFR) algorithm, and (3) eliminating irrelevant candidate variables by the random probe method.
In addition to the 16 primary features, which were directly extracted from the postural signal, their pairwise products (except products of a primary feature by itself), called “cross-terms” (CT), were computed. Indeed, the product of two primary features may provide more relevant information than the two primary features separately. Thus, a total of 136 candidate variables were generated, including the 16 primary features and their 120 pairwise products.
The OFR algorithm (Chen et al., 1989) operates iteratively, given the candidate variable vectors fk, k
1) All candidate vectors (including the “probes” defined in the next subsection) are ranked according to their correlations to the response variable. In observation space, the correlation ck between the k-th candidate variable vector fk and the response variable vector is the squared cosine of the angle between these vectors: ck = cos2 (fk, Ω). The candidate variable that is most correlated to the response variable (with the maximum squared cosine) is ranked first.
2) All remaining candidate variables, and the response variable, are orthogonalized with respect to the first selected variable, in order to eliminate the contribution of the latter to the response variable. Then, the first selected variable is stored and removed from the set, and the algorithm is iterated with the remaining orthogonalized variables, until all candidate variables are ranked.
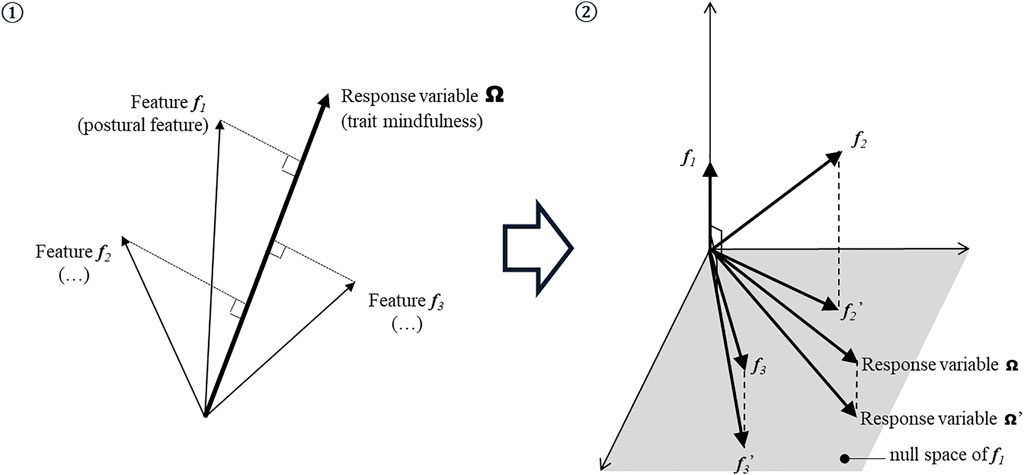
FIGURE 2. An illustration of the Orthogonal Forward Regression (OFR) algorithm for variable ranking. The algorithm operates iteratively: 1) all candidate variables are ranked according to their correlations to the response variable, namely the squared cosine of the angle between the candidate variable and the response variable; the most correlated variable (with the maximum squared cosine) is ranked first; 2) all remaining candidate vectors and the response variable are orthogonalized with respect to the first vector, in order to eliminate the contribution of the latter to the response variable; then, the first candidate variable is stored and removed from the set of candidate variables, and the algorithm iterates with the remaining orthogonalized candidate variables and the response variable, until all candidate variables are ranked.
Variable selection was performed by the random probe method (Stoppiglia et al., 2003). Specifically, 100 randomly drawn “probe” vectors were appended to the set of candidate vectors, and ranked together with the latter as described above. The higher the probability for a probe to rank better than a non-probe candidate variable, the lower the relevance of the latter. For each non-probe candidate variable i, the cumulative probability
The purpose of model selection is to select the model that is expected to generalize best, i.e., to have the smallest generalization error, given the available data. It was performed by Leave-One-Out (LOO) cross-validation, a method that provides an unbiased estimation of the generalization error of a model (Vapnik, 2013). Two steps were performed: (1) among models with the same complexity (e.g., NN models with the same number of hidden neurons), trained with different initial parameter values, find the NN model with initial parameter values that achieves the lowest generalization error; (2) among models with different levels of complexity (e.g., for classification, the logistic model and NN classifiers with a variable number of hidden neurons), find the model that achieves the lowest generalization error.
As a preliminary step, we discarded models that were obviously prone to overfitting by checking the rank of their Jacobian matrices. The Jacobian matrix of a NN model with
One could intuitively consider that model selection should be based on the minimum of the Root Mean Square Error (RMSE) on the training/validation set (Equation 1), because it reflects the distance between the model predictions and the measured values of the response variable:
where
Model selection was based on the comparison of the Leave-One-Out (LOO) score between candidate models of increasing complexity. For a given complexity, a LOO score is computed in N steps where N is the number of examples of the training/validation set (n = 109); at each step, one example of the training/validation set is withdrawn from the set, a model is trained (with a given set of initial parameter values) with the remaining N-1 examples; the modeling error on the withdrawn example is computed, and the LOO score of the model is computed as described below. In the present work, this procedure was iterated 300 times, with 300 different sets of initial parameter values. Finally, the model with the smallest LOO was stored as the “best” candidate model of the considered complexity, given the training/validation data. This procedure was performed for complexities (number of hidden neurons) ranging from 0 hidden neuron (i.e., multilinear model) to five hidden neurons, as described in the Results section.
For regression, the LOO score of a model is computed as (Equation 2):
where
For classification, the LOO score is computed as follows: if the left-out example k is misclassified, the error rk-k is taken equal to 1, otherwise to 0. The LOO score is computed as (Equation 3):
The sum on the right-hand side is the number of misclassification errors, hence the LOO score is an estimation of the misclassification rate of the classifier, given the training/validation data.
Two indices were computed for model assessment: (i) the RMSE on the test set, disjoint from the training/validation set, and (ii) the Pearson correlation coefficient between the model estimations and the measured values of the FMI score. The RMSE on the test set (“test RMSE”) is computed as in Equation 1, but for the fact that the data are those of the test set. The lower the test RMSE, the better the model performance on data unseen during the design of the model. The Pearson correlation coefficient provides an additional information, namely, to what extent the estimations and the measured values are linearly related; however, this quantity alone is not a valid assessment of model performance, as a very poor model (with a very high test RMSE) may have a correlation coefficient of 1 (e.g., a model that would always provide an estimation equal to 1000 times the measured value). In addition to the aforementioned indices, it is useful to compare the test RMSE of the selected model with the RMSE of a “baseline model” in order to ascertain that the results are acceptable. In the regression approach, the baseline model is the simple-minded model that estimates the FMI scores of all examples of the test set as equal to the mean FMI score on the training/validation set.
When addressing a classification problem with two classes (mindful and non-mindful), model performance can be assessed in a number of ways.
Performance indices classically include (i) the accuracy (i.e., percentage of examples that are correctly classified, Equation 4) or, equivalently, the misclassification rate (1-accuracy), (ii) the sensitivity (i.e., the percentage of examples of the mindful class – considered as the “positive” class – that are correctly classified, also called true positive rate, Equation 5), and (iii) the specificity (i.e., the percentage of examples of the non-mindful class that are correctly classified, Equation 6):
The Receiver Operating Characteristic (ROC) curve depicts graphically the relation between sensitivity and
In addition to computing the above performance indices, it is useful to compare the results of the selected classifier with those of a simple-minded “baseline classifier”. In the present work, we investigated whether one can find, by machine learning, a deterministic relation between the posture and the trait mindfulness; specifically, in the classification approach, we tested whether mindfulness status (mindful vs. non-mindful) can be inferred from the selected variables. If posture and trait mindfulness were unrelated, the selected model should not perform better than chance. In the present work, the two classes have the same number of examples; thus, the most suitable baseline classifier is a random classifier that assigns each example to one of the two classes with equal probability, hence has 50% accuracy. Any classifier whose accuracy is smaller than 50% is not acceptable.
Table 2 summarizes the basic statistics on demographic (age and gender) and biometric (weight and height) measures for the three military units where examples originated from, and for the two subsets of data we created from the original sample (training/validation and test sets).
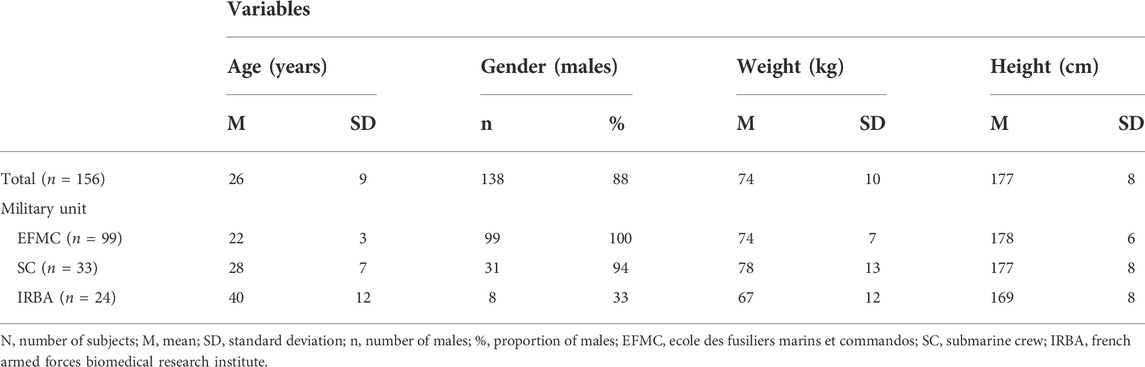
TABLE 2. Summary of demographic (age and gender) and biometric (weight and height) data for the three military units from which the examples originated. These data pertain to the 156 subjects selected from the study (see Participants section).
Table 3 reports the score of trait mindfulness, as assessed with the FMI questionnaire, for the three military units. For the variable “mindfulness status” (see Method section for a description of how it was computed), 50% of examples were labelled as “mindful” and that proportion was similar in the training/validation (Nmindful = 53) and test sets (nmindful = 23).
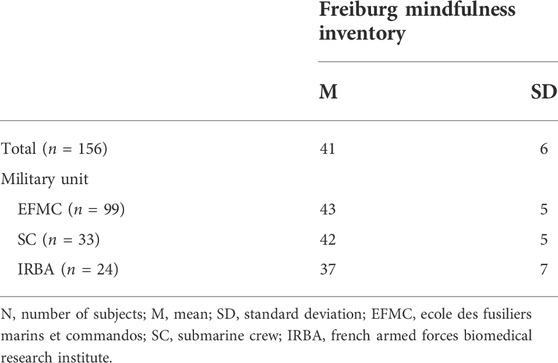
TABLE 3. Score of trait mindfulness, as assessed with the Freiburg Mindfulness Inventory, for the three military units from which the examples originated. These data pertain to the 156 subjects selected from the study (see Participants section).
The variables that were selected as relevant to estimate the trait mindfulness (as described in the Variable Selection section) are presented in Table 4. Only cross-terms (pairwise products of primary features), were selected with the chosen thresholds. Variables that were selected varied depending on the condition (EC or EO), but they were the same for classification and regression.
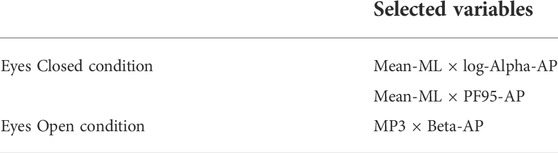
TABLE 4. Results of variable selection for Eyes closed and Eyes open conditions. The selected variables were the same for regression and classification. A detailed description of the postural features, including their descriptive statistics, is provided in Supplementary Material (see Section Computation of postural features and Supplementary Table S1).
Figure 3 shows the LOO score and the training RMSE of the models on which the LOO method was applied (i.e. models whose Jacobian matrix had full rank) for the regression approach, in EC and EO conditions separately. As expected, the RMSE decreases when the model complexity (number of hidden neurons) increases, from the multilinear model (0 hidden neuron) upward. By contrast, the LOO score goes through a minimum for the NN model including two hidden neurons in the EC condition, and subsequently increases with increasing model complexity (Figure 3A). Therefore, the NN model including two hidden neurons was selected as the best model, given the experimental data, to address the regression problem in the EC condition. In the EO condition, the LOO score is minimum for the NN model including a single hidden neuron and remains higher with the multilinear model and other NN models (Figure 3B). Therefore, the NN model including a single hidden neuron was selected as the best model, given the experimental data, to address the regression problem in the EO condition.
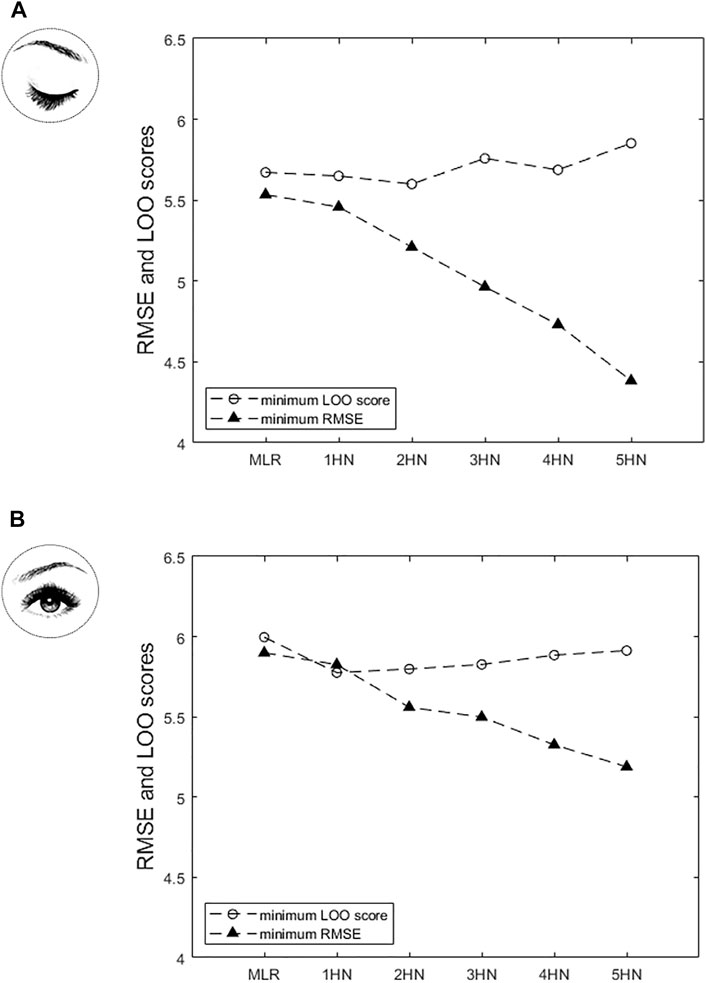
FIGURE 3. In the regression approach, variation of the Leave-One-Out (LOO) score and of the Root Mean Square Error (RMSE) on the training set as a function of model complexity [MLR: multilinear regression model; nHN: neural network (NN) with n hidden neurons (n ≠ 0)], (A) in Eyes closed (EC) condition and (B) in Eyes open (EO) condition. In the EC condition, the LOO score is minimum with the NN model including two hidden neurons. Therefore, the NN model including two hidden neurons was selected to address the regression problem in the EC condition. In the EO condition, the LOO score is minimum with the NN model including a single hidden neuron. Therefore, the NN model including a single hidden neuron was selected to address the regression problem in the EO condition.
Figure 4 shows the LOO score and the misclassification rate
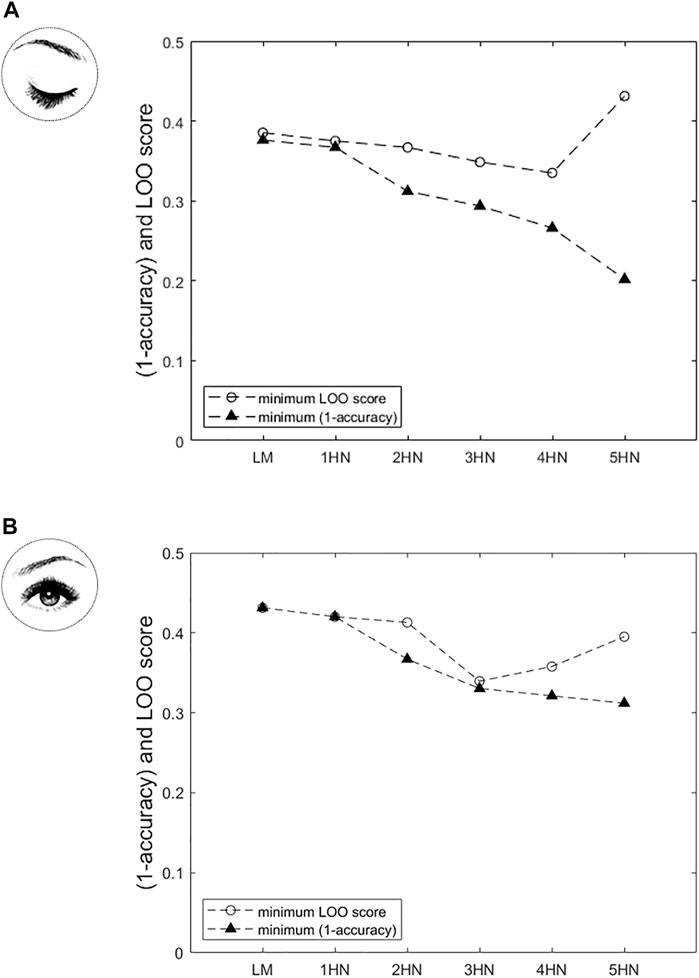
FIGURE 4. In the classification approach, variation of the Leave-One-Out (LOO) score and of the misclassification rate
Table 5 shows the performance of the models that were selected for addressing the regression problem, in EC and EO conditions separately. In the EC condition, the training/validation RMSE and the test RMSE of the selected model are smaller than the test RMSE of the baseline model; in addition, the training/validation and the test RMSE are of the same order of magnitude, which shows that the test set is a representative sample of the available data. The estimated and measured values of the FMI score are significantly positively correlated, both on the training/validation set and on the test set. Taken together, these findings show that such a model is acceptable. Hence, we show that, given the data obtained in EC condition, there exists at least one deterministic function that provides a reliable estimation of the FMI score from the postural signal.
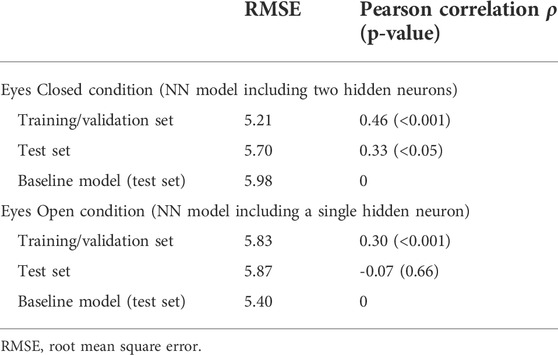
TABLE 5. Performance of the models that were selected for addressing the regression problem, in the Eyes closed condition and in the Eyes open condition. Two indices of performance are reported: (i) the Root mean square error (RMSE), and (ii) the Pearson correlation coefficient ρ between the model predictions and the measured values for the Freiburg Mindfulness Inventory score. Results are presented separately for the training/validation set and the test set, together with the results of the baseline model.
By contrast, in the EO condition, the test RMSE of the selected model is much larger than the test RMSE of the baseline model. Additionally, on the test set, the model predictions and the measured values for FMI score are uncorrelated. Taken together, these results show that the model is unacceptable. Hence, given the data obtained in EO condition, we have been unable to find a deterministic function that provides a reliable estimation of the FMI score from the postural signal.
The upper part of Table 6 shows the performance of the NN model including four hidden neurons for addressing the classification problem in the EC condition. The accuracy of the NN model on the test set (64%) is much higher than the performance of the baseline classifier that was defined with 50% accuracy (see the Method for detailed explanations). Hence, we show that, given the data obtained in EC condition, there exists at least one deterministic function that provides a reliable estimation of the mindfulness status from the postural signal.
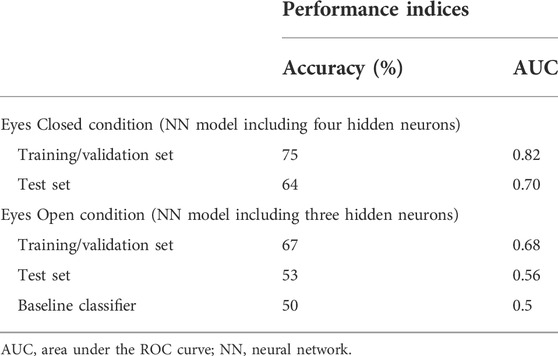
TABLE 6. Performance of the NN model when addressing the classification problem in the Eyes Closed condition (upper part) and the Eyes Open condition (lower part). Results are reported separately for the training/validation set and the test set, together with the performance of the baseline model (random classifier).
The lower part of Table 6 shows the performance of the NN model including three hidden neurons for addressing the classification problem in the EO condition. The NN model has 67% accuracy on the training/validation set but the accuracy drops to 53% on the test set, which is very close to the performance of the baseline classifier (50%). Hence, given the data obtained in EO condition, we have been unable to find a deterministic function that provides a reliable estimation of the mindfulness status from the postural signal.
To summarize, regression and classification approaches showed that, given the available experimental data, models trained from postural data collected in EC condition, with the selected variables, perform correctly, while the models trained from postural data collected in EO condition do not, all other things being equal. Hence, in EC condition, at least one neural network model can be exhibited, which provides an accurate estimation of the FMI score from the postural signal, while this is not possible in EO condition.
In the present study, we aimed to investigate the posture as a proxy for enhanced body awareness (proprioception) in trait mindfulness. To this end, we examined whether the self-reported trait mindfulness could be estimated successfully from the postural signal, using machine learning based models and given the data available from a sample of 156 healthy subjects. Specifically, we tested whether the FMI score could be estimated from the postural signal (regression approach), and whether discrimination of mindful from non-mindful participants could be performed from the same signal (classification approach). The first observation is that NN models designed from postural data collected in EC condition successfully estimate the mindfulness status (with 64% accuracy), and the FMI score, from the selected postural features. Assuming that the selected models should perform better than their respective baseline model if postural signal accounts for self-reported trait mindfulness (see section Assessment of the model performance in the Method for detailed description of baseline model), our results support the existence of a stochastic relation between posture and trait mindfulness. We further explored how the level of body awareness engagement in postural control may affect this relationship, assuming that body awareness is more strongly engaged in postural control when the latter rests on body cues only (from vestibular and somatosensory systems) than when visual information is available. In our work, body awareness engagement in postural control was experimentally controlled by instructing participants either to keep their eyes closed (EC condition with high body awareness engagement) or to keep their eyes open (EO condition with low body awareness engagement) during standing. The second observation is that we found an effect of the experimental condition on model performance: a model trained from data collected in EC condition estimates the trait mindfulness from the selected postural features more accurately than a model trained from data collected in EO condition (classification: 64% vs. 53% accuracy; regression: presence vs. lack of correlation between predicted and measured FMI scores). This finding supports the idea that the strength of relationship between posture and trait mindfulness increases as a function of body awareness engagement in postural control. In summary, our results show that self-reported trait mindfulness and postural signal are associated, and that the higher the body awareness engagement in postural control the stronger the relationship between trait mindfulness and posture. Taken together, our findings provide the first physiological argument based on the postural signal that supports the hypothesis that trait mindfulness is characterized by enhanced body awareness (Hölzel et al., 2011; Treves et al., 2019; Verdonk et al., 2020).
Variable selection was performed to identify the set of relevant postural features for estimating the trait mindfulness. The most relevant variables were found to be cross-terms, i.e. pairwise products of the primary features that were extracted from the postural signal. This means that each primary feature of the product, taken separately, is not as relevant, for estimating the trait mindfulness, as a nonlinear combination of the two features such as – but not limited to – their product. It could be argued that the product of postural features, although relevant for estimating trait mindfulness by our machine learning models, remain difficult to interpret functionally and in terms of postural control. Future studies are needed to increase the biomechanical interpretability of the machine learning models developed in our study, which is a necessary requirement to make the enhanced body awareness (proprioception) hypothesis in mindfulness more readable in practice (e.g., for potential clinical use in mindfulness based programs). As a preliminary step, one could focus on the postural feature Mean-ML that was included in both selected combinations of primary features in the EC condition. Basically, the feature Mean-ML reflects the average position of the CoP along the medio-lateral axis over time. Considering that enhanced proprioception in mindful individuals should be associated with less displacements of their body’s center of pressure (i.e., better postural stability), one could hypothesise that mindful individuals have their CoP closer to the equilibrium point (the central point between both internal malleolus, which also corresponds to the origin of axes on statokinesigram; see Supplementary Material, section The biomechanical modeling framework of standing posture), compared to non-mindful individuals. In other words, one could hypothesise that mean and standard deviation values of the postural feature Mean-ML are closer to zero for mindful individuals than for non-mindful individuals. Interestingly, our data provide evidence, which need to be replicated with a larger sample, in favour of this hypothesis (see Supplementary Table S1 that includes statistics of the feature Mean-ML for mindful and non-mindful individuals separately).
Even though our findings provide preliminary physiological evidence supporting the enhanced body awareness hypothesis in mindfulness, they do not allow inferring any causal relationship between self-reported trait mindfulness and enhanced body awareness (proprioception). This limitation in the interpretation of results is important to consider if operationalization of mindfulness is extended to training in the form of brief interventions (e.g., Mindfulness Based Stress Reduction, Mindfulness-Based Cognitive Therapy) or long-term practice. Only studies that will experimentally manipulate mindfulness will provide evidence, if any, that mindfulness training may causally improve proprioceptive body awareness, as assessed with the analysis of posture. It should be noted that a causal, beneficial effect of mindfulness training on body awareness has been reported before using behavioural tasks [e.g., heartbeat tracking, tactile detection; see (Treves et al., 2019)], but needs to be extended to physiological signals originating from within sensory systems of the body.
Given the inherently complex (nonlinear) nature of psychophysiological relationships (Cacioppo and Tassinary, 1990), machine learning techniques were used for finding numerical models that can account for the relation between self-reported trait mindfulness and postural signal as accurately as possible, and that have the best generalization ability (i.e., that would perform similarly on novel data). We implemented a robust, proven machine learning methodology that was best suitable given our relatively small sample size, allowing us to reach our primary goal: generate physiological evidence that supports the enhanced body awareness hypothesis in mindfulness. Regarding potential clinical use of the present findings, our proof-of-concept study suggests that postural signal could be an interesting candidate physiological marker (i.e., a biomarker) of trait mindfulness. Yet, the development of a reliable predictive tool to objectively measure trait mindfulness by analysing the postural signal would primarily require a larger sample. If confirmed with a larger sample, our insights could have implications for future mindfulness research since trait mindfulness is usually assessed by means of self-report psychological scales (Sauer et al., 2013) that raise methodological concerns due to their vulnerability to limitations of introspection and social-desirability biases (Baumeister et al., 2007; Grossman, 2011; Van Dam et al., 2018).
From a psychophysiological perspective, the limited performance of our models might partially be due to fluctuations of body awareness engagement in postural control during recording. Indeed, unlike the psychological trait of mindfulness that is supposed to be relatively stable over time (Sauer et al., 2013), the subject’s postural control could have been contaminated by a range of psycho-cognitive processes (e.g., changes in attention, emotional thoughts, etc.) that are known to be associated with changes in postural signal (Amboni et al., 2013; Adkin and Carpenter, 2018). We encourage the investigation of the relationship that posture has with state (context specific) and trait (individual specific) components of mindfulness, for example by recording postural signal before and while participants are engaged in a mindfulness meditation training in a standing position. Furthermore, self-report measure of trait mindfulness relies on a verbal method that provides access only to introspective information that is consciously processed by the subject (Dehaene et al., 2006). On the other hand, a dominant portion of the postural control drive is subcortical, and conscious perception of postural control mechanisms remains limited (Forbes et al., 2018). We suggest that discrepancy between the conscious and (predominantly) unconscious nature of processes underlying the self-report of trait mindfulness and the postural control respectively might explain part of the limited performance of our psychophysiological model. Recently, we have proposed that cognitive functioning associated with mindfulness could be characterized with lower consciousness threshold that facilitates the conscious processing of information coming from within (body awareness and self-awareness) and outside the body (world awareness) (Verdonk et al., 2020). Interestingly, we observe that our model (in the classification approach) accounts for relation between trait mindfulness and posture more accurately in the mindful sample than in the non-mindful sample, as reflected by its greater sensitivity (70%) compared to its specificity (58%). This finding, which is preliminary and needs to be confirmed by a dedicated study, suggests that mindful functioning could potentially contribute to increase the proportion of postural control drive that is consciously processed.
Finally, in our study, analysis of postural signal focused on 16 primary features (and their cross-terms) that have been characterized as contributing to discriminate between individual postural patterns (Yamamoto et al., 2015). Yet, it should be noted that a much greater number of features (more than 70) can be extracted from the postural signal in the time and frequency domains. Future studies are encouraged to explore the high dimensionality inherent in postural data in using the existing wide range of machine learning techniques and algorithms, which could ultimately lead to better modelling of complex psychophysiological processes that characterize mindfulness.
The Matlab custom scripts used in the design of models reported in this paper are available from the corresponding author upon reasonable request.
All requests for raw and analyzed data should be sent to ZGNzc2EtcGFyaXNAc2FudGUuZGVmZW5zZS5nb3V2LmZy, because they will be reviewed by our legal department (French Military Health Service) to verify whether the request is subject to any confidentiality constraints. Requests regarding materials, including programming code, should be sent to the corresponding author (CV).
The study was reviewed and approved by the French Ethics Committee (Comité de protection des personnes Sud Est V, ID-RCB: 2017-A00839-44), and was conducted in accordance with ethical standards of the 1964 Helsinki declaration and its later amendments.
CV conceptualized the research question, conducted data analysis, and wrote the paper. GD contributed to data analysis and to writing the manuscript. MT collaborated to writing the manuscript. TM and FV assisted with early stages of data analysis. All authors approved the final version of the manuscript for submission.
We thank F. Canini, A. Duffaud, M. Bertrand, A. Longin, A. Vannier, O. Ferhani, C. Rouquet, and J-B. Billaud for help with data collection. This study is part of a project on cognitive neurosciences supported by the French Military Health Service. The opinions or assertions expressed herein are the private views of the authors and are not to be considered as official or as reflecting the views of the French Military Health Service.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fphys.2022.915134/full#supplementary-material
Adkin A. L., Carpenter M. G. (2018). New insights on emotional contributions to human postural control. Front. Neurol. 9, 789. doi:10.3389/fneur.2018.00789
Amboni M., Barone P., Hausdorff J. M. (2013). Cognitive contributions to gait and falls: Evidence and implications. Mov. Disord. 28, 1520–1533. doi:10.1002/mds.25674
Baumeister R. F., Vohs K. D., Funder D. C. (2007). Psychology as the science of self-reports and finger movements: Whatever happened to actual behavior? Perspect. Psychol. Sci. 2, 396–403. doi:10.1111/j.1745-6916.2007.00051.x
Błaszczyk J. W. (2016). The use of force-plate posturography in the assessment of postural instability. Gait Posture 44, 1–6. doi:10.1016/j.gaitpost.2015.10.014
Bradley A. P. (1997). The use of the area under the ROC curve in the evaluation of machine learning algorithms. Pattern Recognit. 30, 1145–1159. doi:10.1016/s0031-3203(96)00142-2
Brown K. W., Ryan R. M. (2003). The benefits of being present: Mindfulness and its role in psychological well-being. J. Pers. Soc. Psychol. 84, 822–848. doi:10.1037/0022-3514.84.4.822
Cacioppo J. T., Tassinary L. G. (1990). Inferring psychological significance from physiological signals. Am. Psychol. 45, 16–28. doi:10.1037//0003-066x.45.1.16
Chen S., Billings S. A., Luo W. (1989). Orthogonal least squares methods and their application to non-linear system identification. Int. J. control 50, 1873–1896. doi:10.1080/00207178908953472
Dehaene S., Changeux J. P. (2011). Experimental and theoretical approaches to conscious processing. Neuron 70, 200–227. doi:10.1016/j.neuron.2011.03.018
Dehaene S., Changeux J. P., Naccache L., Sackur J., Sergent C. (2006). Conscious, preconscious, and subliminal processing: A testable taxonomy. Trends Cogn. Sci. 10, 204–211. doi:10.1016/j.tics.2006.03.007
Dreyfus G. (2005). Neural networks: Methodology and applications. Berlin, Germany: Springer Science and Business Media.
Fitzpatrick R., Mccloskey D. I. (1994). Proprioceptive, visual and vestibular thresholds for the perception of sway during standing in humans. J. Physiol. 478, 173–186. doi:10.1113/jphysiol.1994.sp020240
Forbes P. A., Chen A., Blouin J. S. (2018). “Sensorimotor control of standing balance,” in Handbook of clinical neurology (Amsterdam, Netherlands: Elsevier), 61–83.
Geman S., Bienenstock E., Doursat R. (1992). Neural networks and the bias/variance dilemma. Neural Comput. 4, 1–58. doi:10.1162/neco.1992.4.1.1
Grossman P. (2011). Defining mindfulness by how poorly I think I pay attention during everyday awareness and other intractable problems for psychology's (re) invention of mindfulness: Comment on Brown et al.(2011). Psychol. Assess. 23, 1034–1040. doi:10.1037/a0022713
Gu J., Strauss C., Bond R., Cavanagh K. (2015). How do mindfulness-based cognitive therapy and mindfulness-based stress reduction improve mental health and wellbeing? A systematic review and meta-analysis of mediation studies. Clin. Psychol. Rev. 37, 1–12. doi:10.1016/j.cpr.2015.01.006
Guyon I., Elisseeff A. (2003). An introduction to variable and feature selection. J. Mach. Learn. Res. 3, 1157–1182. doi:10.1162/153244303322753616
Hölzel B. K., Lazar S. W., Gard T., Schuman-Olivier Z., Vago D. R., Ott U., et al. (2011). How does mindfulness meditation work? Proposing mechanisms of action from a conceptual and neural perspective. Perspect. Psychol. Sci. 6, 537–559. doi:10.1177/1745691611419671
Kee Y. H., Chatzisarantis N. N. L. D., Kong P. W., Chow J. Y., Chen L. H. (2012). Mindfulness, movement control, and attentional focus strategies: Effects of mindfulness on a postural balance task. J. Sport Exerc. Psychol. 34, 561–579. doi:10.1123/jsep.34.5.561
Lutz A., Jha A. P., Dunne J. D., Saron C. D. (2015). Investigating the phenomenological matrix of mindfulness-related practices from a neurocognitive perspective. Am. Psychol. 70, 632–658. doi:10.1037/a0039585
Mehling W. E., Gopisetty V., Daubenmier J. J., Price C. J., Hecht F. M., Stewart A., et al. (2009). Body awareness: Construct and self-report measures. PloS one 4, e5614. doi:10.1371/journal.pone.0005614
Mills N., Allen J. (2000). Mindfulness of movement as a coping strategy in multiple sclerosis: A pilot study. Gen. Hosp. Psychiatry 22, 425–431. doi:10.1016/s0163-8343(00)00100-6
Rhea C. K., Diekfuss J. A., Fairbrother J. T., Raisbeck L. D. (2019). Postural control entropy is increased when adopting an external focus of attention. Mot. control 23, 230–242. doi:10.1123/mc.2017-0089
Rosenstreich E., Levi U., Laslo-Roth R. (2018). A matter of (inner) balance: The association between facets of mindfulness, attention deficit, and postural stability. Mindfulness 9, 1627–1636. doi:10.1007/s12671-018-0909-0
Sauer S., Walach H., Schmidt S., Hinterberger T., Lynch S., Büssing A., et al. (2013). Assessment of mindfulness: Review on state of the art. Mindfulness 4, 3–17. doi:10.1007/s12671-012-0122-5
Stoppiglia H., Dreyfus G., Dubois R., Oussar Y. (2003). Ranking a random feature for variable and feature selection. J. Mach. Learn. Res. 3, 1399–1414. doi:10.1162/153244303322753733
Tang Y., Hölzel B., Posner M. (2016). Traits and states in mindfulness meditation. Nat. Rev. Neurosci. 17, 59. doi:10.1038/nrn.2015.7
Treves I. N., Tello L. Y., Davidson R. J., Goldberg S. B. (2019). The relationship between mindfulness and objective measures of body awareness: A meta-analysis. Sci. Rep. 9, 17386. doi:10.1038/s41598-019-53978-6
Trousselard M., Steiler D., Raphel C., Cian C., Duymedjian R., Claverie D., et al. (2010). Validation of a French version of the Freiburg mindfulness inventory - short version: Relationships between mindfulness and stress in an adult population. Biopsychosoc. Med. 4, 8. doi:10.1186/1751-0759-4-8
Tuthill J. C., Azim E. (2018). Proprioception. Proprioception. Curr. Biol. 28, R194–R203. doi:10.1016/j.cub.2018.01.064
Van Dam N. T., Van Vugt M. K., Vago D. R., Schmalzl L., Saron C. D., Olendzki A., et al. (2018). Mind the hype: A critical evaluation and prescriptive agenda for research on mindfulness and meditation. Perspect. Psychol. Sci. 13, 36–61. doi:10.1177/1745691617709589
Vapnik V. (2013). The nature of statistical learning theory. Berlin, Germany: Springer science and business media.
Verdonk C., Trousselard M., Canini F., Vialatte F., Ramdani C. (2020). Toward a refined mindfulness model related to consciousness and based on event-related potentials. Perspect. Psychol. Sci. 15, 1095–1112. doi:10.1177/1745691620906444
Visser J. E., Carpenter M. G., Van Der Kooij H., Bloem B. R. (2008). The clinical utility of posturography. Clin. Neurophysiol. 119, 2424–2436. doi:10.1016/j.clinph.2008.07.220
Vuillerme N., Nafati G. (2007). How attentional focus on body sway affects postural control during quiet standing. Psychol. Res. 71, 192–200. doi:10.1007/s00426-005-0018-2
Walach H., Buchheld N., Buttenmüller V., Kleinknecht N., Schmidt S. (2006). Measuring mindfulness - the Freiburg mindfulness inventory (FMI). Personality Individ. Differ. 40, 1543–1555. doi:10.1016/j.paid.2005.11.025
Yamamoto T., Smith C. E., Suzuki Y., Kiyono K., Tanahashi T., Sakoda S., et al. (2015). Universal and individual characteristics of postural sway during quiet standing in healthy young adults. Physiol. Rep. 3, e12329. doi:10.14814/phy2.12329
Keywords: mindfulness, body awareness, posture, machine learning, proprioception
Citation: Verdonk C, Trousselard M, Medani T, Vialatte F and Dreyfus G (2022) Probing the posture with machine learning provides physiological evidence supporting the enhanced body awareness hypothesis in trait mindfulness. Front. Physiol. 13:915134. doi: 10.3389/fphys.2022.915134
Received: 07 April 2022; Accepted: 14 July 2022;
Published: 02 September 2022.
Edited by:
Maurizio Schmid, Roma Tre University, ItalyReviewed by:
Tomasz Jankowski, The John Paul II Catholic University of Lublin, PolandCopyright © 2022 Verdonk, Trousselard, Medani, Vialatte and Dreyfus. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Charles Verdonk, dmVyZG9uay5jaGFybGVzQGdtYWlsLmNvbQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.