 Andrey Dmitriev
Andrey Dmitriev Andrey Lebedev1
Andrey Lebedev1 Vasily Kornilov
Vasily Kornilov Victor Dmitriev
Victor Dmitriev- 1Big Data and Information Retrieval School, HSE University, Moscow, Russia
- 2Cybersecurity Research Center, University of Bernardo O’Higgins, Santiago, Chile
- 3Graduate School of Business, HSE University, Moscow, Russia
Many different precursors are known, but not all of which are effective, i.e., giving enough time to take preventive measures and with a minimum number of false early warning signals. The study aims to select and study effective early warning measures from a set of measures directly related to critical slowing down as well as to the change in the structure of the reconstructed phase space in the neighborhood of the critical transition point of sand cellular automata. We obtained a dynamical series of the number of unstable nodes in automata with stochastic and deterministic vertex collapse rules, with different topological graph structure and probabilistic distribution law for pumping of automata. For these dynamical series we computed windowed early warning measures. We formulated the notion of an effective measure as the measure that has the smallest number of false signals and the longest early warning time among the set of early warning measures. We found that regardless of the rules, topological structure of graphs, and probabilistic distribution law for pumping of automata, the effective early warning measures are the embedding dimension, correlation dimension, and approximation entropy estimated using the false nearest neighbors algorithm. The variance has the smallest early warning time, and the largest Lyapunov exponent has the greatest number of false early warning signals. Autocorrelation at lag-1 and Welch’s estimate for the scaling exponent of power spectral density cannot be used as early warning measures for critical transitions in the automata. The efficiency definition we introduced can be used to search for and investigate new early warning measures. Embedding dimension, correlation dimension and approximation entropy can be used as effective real-time early warning measures for critical transitions in real-world systems isomorphic to sand cellular automata such as microblogging social network and stock exchange.
1 Introduction
It was established more than 35 years ago that self-organization leads not only to the emergence of order in a nonlinear complex system and the separation of order parameters from the set of degrees of freedom, but also brings the system to a critical state (e.g., see the paper [1]). In such a state, catastrophic avalanches of any scale are possible, limited only by the size of the system. What is fundamentally important in such a phenomenon is that there is no need to tune the control parameter to a critical value, which is necessary for phase transitions. For example, the well-known paramagnetic-ferromagnetic phase transition of the second kind requires fine-tuning of temperature as a control parameter to a critical value. On the contrary, self-organized criticality (SOC) spontaneously arises as a result of many local interactions between the elements of the system. In the context of statistical physics of phase transitions, a system located in a small neighborhood of a critical point is unstable with respect to small perturbations capable of causing avalanches of any size in the system. Such a point separates disordered (the phase with a zero order parameter) and ordered (the phase with a non-zero order parameter) phases (see Figure 1C). It has been relatively recently established (e.g., see papers [2, 3]) that complex systems are not only capable of self-organization at a critical point, but also capable of self-organization into a state characterized by two stable configurations. Self-organized bistability (SOB) demonstrates the coexistence of two stable configurations in the hysteresis loop (
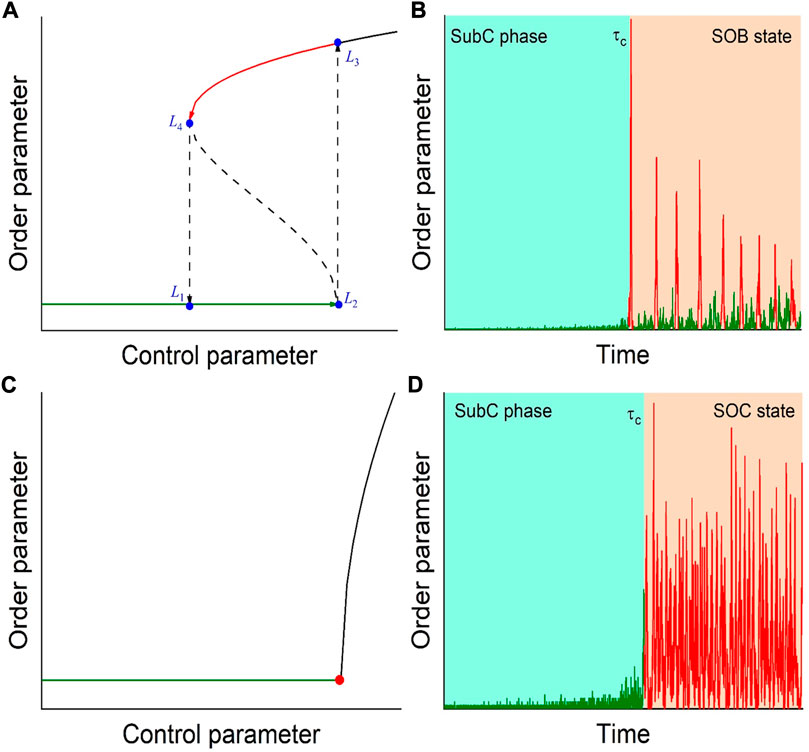
FIGURE 1. Mean-field phase diagrams showing self-organization into bistable (A) and critical (C) states, and time series for the order parameter corresponding to self-organization into bistable (B) and critical (D) states. The hysteresis loop is shown by arrows. The symbol
The basic model of self-organization of systems into a critical state is the sand pile model (e.g., see the paper [13]), which is formulated as a two-dimensional cellular automaton. Such a model describes a variety of processes in complex systems that self-organize into a critical state and reflects typical properties and features of real-world systems of various origins, such as stock exchanges and online social networks (see section “Conclusion”). The simplest sand automaton is a square grid whose nodes contain an integer number of grains of sand. New grains of sand fall on randomly selected nodes. If the number of grains of sand in each node is at most three, the automaton is in a stable state. As soon as a fourth grain of sand falls into one of the nodes, a collapse occurs. The grains of sand from this node are redistributed to neighboring nodes, which can cause collapses in them. Collapses will avalanche until the automaton returns to a steady state again (see Figures 1B, D). Despite the fact that such an automaton is a model system with local rules, i.e., the nodes of the automaton are only capable of interacting with their nearest neighbor nodes, it exhibits complex behavior. In other words, complexity is born from simple elements as a result of self-organization. It is in this context that we consider sand cellular automata as complex model systems. This is the classical model of self-organized criticality proposed by P. Buck, C. Tang, and C. Wiesenfeld in 1987 (see the paper [1]), which demonstrates the transition of an automaton from a subcritical (disordered) phase to a critical state.
One of the problems in the development of early warning systems, which has not been finally solved, is finding effective precursors of the system transition to a critical state, known as the early warning signals (e.g., see papers [14–20]). First of all, it is the search for precursors based on the analysis of the observed sequence of values of a macroscopic variable, usually an order parameter, generated by the system in real time. One of the results of research directly or indirectly related to the analysis of real-time dynamical series is the measures, by the characteristic change of which one can judge about the approach of the system to the critical transition point. Further in this paper we will call such measures the early warning measures (EWM). First of all, these are the EWMs, the change of which is explained by the increase of the relaxation time of the system near the critical point. This is known as the phenomena of critical slowing down (e.g., see the paper [21]). EWMs have also been proposed that are not directly related to this phenomenon, but their characteristic change near the critical point can be considered as the early warning signals for the critical transition (e.g., see the paper [15]). The number of EWMs and systems for which EWMs give good results in predicting critical points is regularly growing.
Despite the available variety of precursors of self-organized critical transitions based on EWMs, not all precursors can be considered as effective. Even the best-studied precursors based on variance and autocorrelation at lag-1 are not effective for all systems. Moreover, the effectiveness of the precursor depends on the origin of the real-world system and/or on local and global features of the observed sequence of values of the macroscopic variable. In the context of early warning systems, we relate the effectiveness of the precursor to the sufficiency of time from the moment of its occurrence to the transition of the system to a critical state for decision making, as well as to the absence of false positive and/or false negative results of early detection.
To date, we are not aware of any work that presents a study of the above-defined efficiency of precursors of self-organized critical transitions. To close this gap, we have investigated the efficiency of various EWMs of dynamical series of the number of unstable nodes of sand cellular automata. To ensure the representativeness of the results obtained, we investigated the effectiveness of not only the most studied EWMs, such as some sample moments, autocorrelation, and the power-law exponent of the spectral density, but also little or no studied EWMs, such as measures related to wavelet transform, and phase space reconstruction from the time series data. In addition, representativeness was ensured by the diversity of topological structure of graphs, local rules, and types of pumping of cellular automata. The choice of sand cellular automata from the existing model systems with SOC and SOB is due to the fact that for them the iteration corresponding to the output of the automaton to the critical state is precisely known, so it is possible to precisely determine the prediction time as one of the criteria for the effectiveness of the measure. Finally, in the context of systems theory, such automata are isomorphic to real-world systems, for which there is a need to perform a real-time study of the critical state exit from the moment they start pumping.
The paper is structured as follows: first, a short introduction to the sandpile cellular automata, including the local rules, graph topologies and external pumping used in this study, and the rationale for choosing such automata as test models to study precursors in real systems are described. Next, a formal definition of an effective precursor to an effective EWM in the context of early warning systems is presented. Also the investigated EWMs and methods of their computation are described. All this is presented in section “Data set and methods”. Finally, the results of computing EWMs depending on the rules, topology and pumping of automata are presented and discussed, as well as the possibilities and limitations of using such measures to detect effective precursors of critical transitions (see section “Results and discussion”). In addition, the possibilities and limitations of using effective precursors for early detection of critical transitions in complex systems are described, as well as possible practical applications of the results obtained (see section “Conclusion”).
2 Methods
As mentioned in section “Introduction”, we investigate the effectiveness of EWMs to self-organize sand cellular automata into a critical state based on the behavior of discrete dynamical series for unstable automata nodes. These are the dynamical series
2.1 Sandpile cellular automaton as a generator of dynamic series data
Consider a sand cellular automaton on a planar graph
First, let us consider the processes occurring in the automaton on SGG, as well as its self-organization in the SOC state. Let initially nodes
For all the automata studied, we used local rules of isotropic (non-directional) models. These are the Bak-Tang- Wiesenfeld (BTW) [1], Manna (MA) [23], and Feder-Feder (FF) [24] models. In the deterministic BTW and FF models, sand grains from unstable node
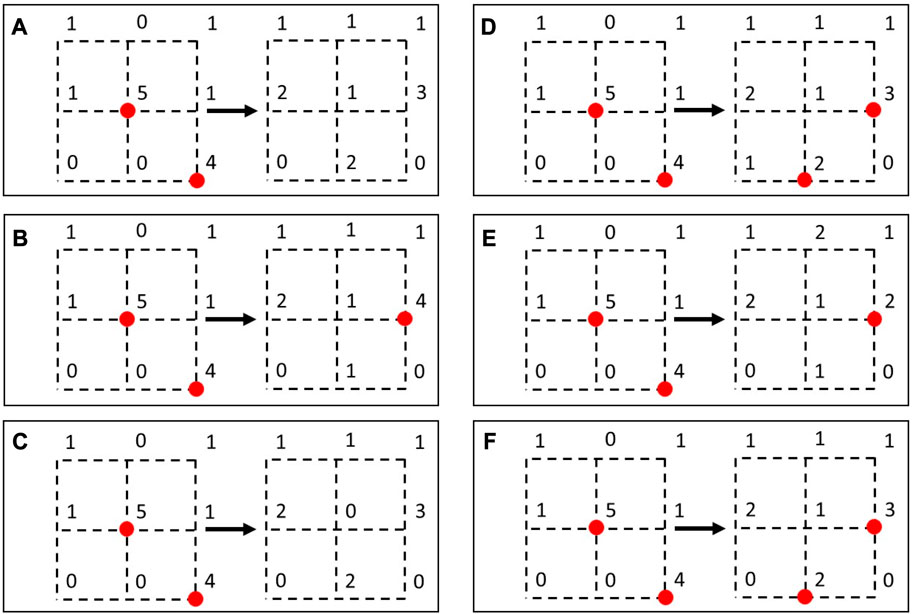
FIGURE 2. Collapse of the unstable vertice (shown in red) in the self-organized critical Bak-Tang-Wiesenfeld model (A), self-organized critical Manna model (B), self-organized critical Feder-Feder model (C), self-organized bistable Bak-Tang-Wiesenfeld model (D), self-organized bistable Manna model (E), and self-organized bistable Feder-Feder model (F).
The above described critical dynamics of the automaton on SGG corresponds to its exit to the SOC state. To exit the automaton to the SOB state, it is sufficient to set the stability threshold equal to
The difference between the local rules of automata on random graphs and the considered rules of automata on SGG is only in the choice of threshold values
In addition to the local rules of automata and graphs on which the collapse of unstable nodes and redistribution of sand grains between nodes occur, it is necessary to describe the rules of sand grains throwing in at each iteration, i.e., the pumping of the automaton. We performed automata pumping to its randomly selected nodes with the number of sand grains thrown in from discrete uniform distribution (DUD) with
2.2 Effectiveness of early warning measure
Let us introduce the notion of an effective EWM. Let,
In addition, we introduce the following notations.
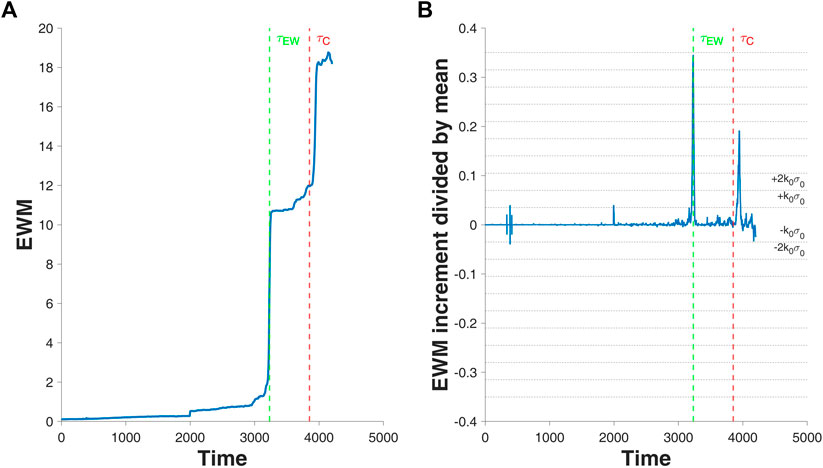
FIGURE 3. Early warning measure time series (A) and corresponding zero-mean time series (B). The symbols
Definition 1. The
Definition 2. The
Definition 3. The early warning measure is called effective (or strictly effective) if it is effective both in terms of early warning time and the number of true early warning signals.
2.3 Calculation methods for early warning measure
This subsection summarizes the window EWMs and their computation methods used in the presented study. Each
Variance, kurtosis, skewness, autocorrelation at lag-1 and power-law scaling exponent (
The precursor of the critical transition of the system is also an increase in the values of the series of exponents as the system approaches
where
Note that the exponent
where H is the Hurst exponent, which characterizes the irregularity of the function
which is used for the spectral estimate of
Estimation of the global irregularity of the series
where
where
In addition to the above EWMs, we investigated the effectiveness of measures based on the reconstruction of the phase space of a sand cellular automaton as a self-organizing dynamical system generating a dynamical series of the number of its unstable nodes. In the context of nonlinear science, the properties of complex self-organizing systems are considered in the phase space of states. According to the Takens theorem, which defines the requirements for the phase space reconstruction, attractor, of self-organizing dynamical systems, the behavior of a cellular automaton can be described by the dynamical realization of one of the system parameters using time delays (e.g., see the paper [28]). In the presented study, this is the instability parameter of the automaton represented by the dynamical series
The coordinates of the
where
The dimension
The measure of the chaotic complexity of the series
where
The measure of regularity of a dynamical series
where correlation sum
The measure of the chaotic dynamics of a sand cellular automaton, which we used as an EWM, is the largest Lyapunov exponent
where
where
3 Results and their discussion
In this section we present and discuss the results of computing EWMs for the self-organization of sand cellular automata into a critical state. We first consider the behavior of the computed EWMs as the automata approach
3.1 Behavior of early warning measures
As a result of computing EWMs, we find that the non-linear trend behavior of a series of EWMs,
Figure 4 shows the series for EWMs whose behavior has a rigorous theoretical justification in the context of critical slowing down. The series
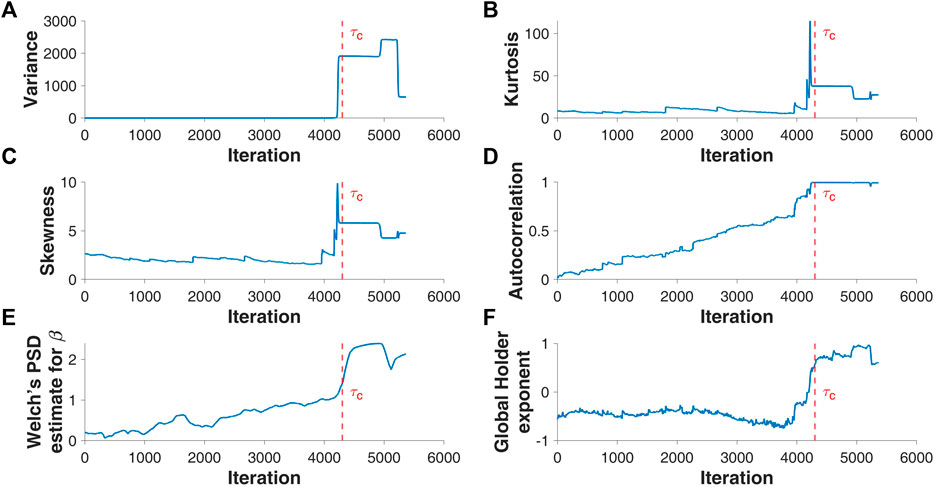
FIGURE 4. Dynamic series of variance (A), kurtosis (B), skewness (C), autocorrelation at lag-1 (D), Welch’s power spectral density estimation for power law exponent (E), and global Holder exponent (F) for the sandpile cellular automaton on the Erdos-Renyi graph with Bak-Tang-Wiesenfeld rule and pumping according to the law of discrete uniform distribution. The symbol
Let us now turn to the behavior of EWMs, which, perhaps with the exception of the largest Lyapunov exponent (see the paper [33]), has not yet been theoretically justified in the context of critical slowing down. We begin by discussing the results obtained for the global Holder exponent,
Consider the EWMs of the reconstructed phase space
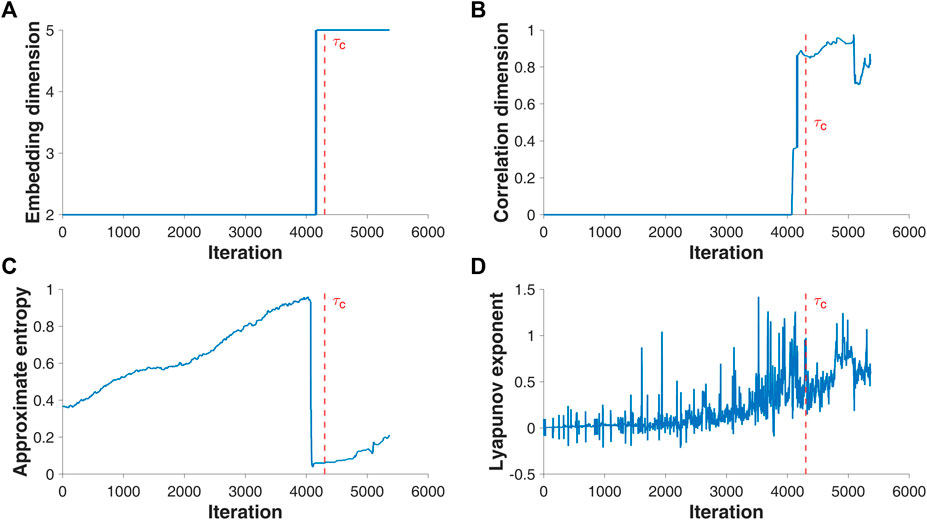
FIGURE 5. Dynamic series of embedding dimension (A), correlation dimension (B), approximate entropy (C), and Lyapunov exponent (D) for the sandpile cellular automaton on the Erdos-Renyi graph with Bak-Tang-Wiesenfeld rule and pumping according to the law of discrete uniform distribution. The symbol
3.2 Effectiveness of early warning measures
In the context of the definition of EWM efficiency proposed in the previous section, the efficiency of EWM for critical transitions in sandpile cellular automata depends on the magnitude of the difference between critical iteration and early warning iteration,
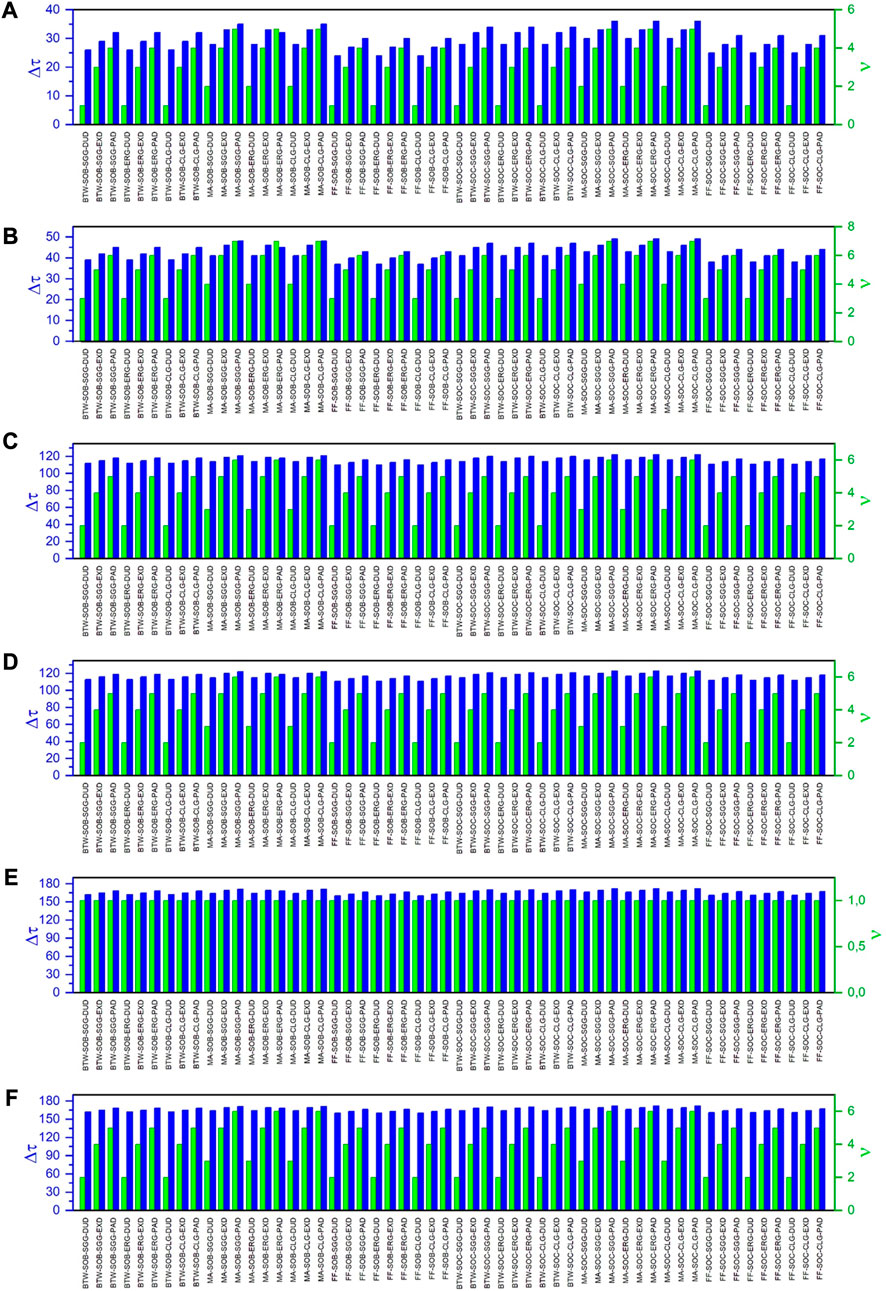
FIGURE 6. Parallel plots demonstrating the effectiveness of variance (A), kurtosis/skewness (B), autocorrelation at lag-1 (C), local Holder exponent (D), embedding/correlation dimension (E), and approximate entropy (F) as early warning measures for critical transitions in the sandpile cellular automata. The lines on the plots correspond to the difference between the early warning time and the critical time (
We consider the effects of the critical transition type (SOB/SOC), local rules (BTW/FF/MA), pumping distribution (DUD/EXD/PAD) and topological graph structure (SGG/ERG/CLG) on the EWM efficiency. It is found that the influence features described below are satisfied for all studied EWMs, as demonstrated by Figure 6. For two automata with the same rules, pumping and graph structures, the EWM for the SOC automaton is more efficient than the corresponding EWM for the SOB automaton, since
To conclude this section, let us consider which of the studied EWMs are the most efficient independent of the type of critical transition, rules, pumping and automata graph structure. The measures determined by the features of the reconstructed phase space structure, such as embedding dimension, correlation dimension and approximation entropy, are effective by early warning time. Apparently, this is due to the fact that the phase space structure is most sensitive to the approximation of a number of unstable nodes of the automaton to
Thus, only the behavior of EWMs based on estimates of embedding dimension, correlation dimension and approximation entropy, in the left neighborhood of the point
4 Conclusion
Embedding dimension, correlation dimension and approximation entropy as effective EWMs can be used in real-time early-warning systems of critical transitions in real systems if its structure is analogous to that of a sand cellular automaton, i.e., the systems are isomorphic. In the context of systems theory [34], the analogy of systems structures is determined by the analogy of functioning of elements and connections between elements of systems. For example, such real systems are a segment of the online social network Twitter and a segment of the stock exchange generating dynamic series in real time. By the term “segment” we denote a set of network users connected by discussion of some topic or some event. For a stock exchange, it is a set of traders involved in buying/selling some security.
Figure 7 demonstrates the formation of chains of retweets in a segment, starting from the pumping of tweets into the network segment (tweet is shown by a red lightning bolt in Figure 7A) to the complete relaxation of the segment (see Figure 7D). The presented process corresponds to some iteration of the automaton’s self-organization process. The nodes of the graph correspond to the users of the segment, the edges of the graph determine the existence of interactions between these users. If two nodes (segment users) are connected by an edge, then one of the segment users is a subscriber of the other, and, accordingly, retweet transmission/acceptance along the edge is possible. Local retweet propagation is shown by the red dashed arrow. Each network user can be either in an active state (red nodes of the graph in Figure 7 corresponding to unstable nodes), in which it is ready to send retweets to its subscribers, or in a passive state (green nodes of the graph in Figure 7 corresponding to stable nodes), in which it is not ready to send retweets for some reason. Sending retweets to subscribers corresponds to the crumbling of an unstable node of the automaton. If some user of a segment that is in the passive state receives a tweet, that causes it to move to the active state (see Figure 7A). This event (pumping) triggers a chain of retweets in the segment, initiated by this user. This user then sends retweets to its followers, and let us assume that as a result of this retweet propagation, they move to the active state (see Figure 7B). The process of moving from passive to active state, and vice versa, continues (see Figure 7C) until the segment consisting of only passive users is completely relaxed (see Figure 7D). The next iteration also starts by pumping tweets from some users in the segment and leads to chains of retweets in the segment. Starting at some iteration (
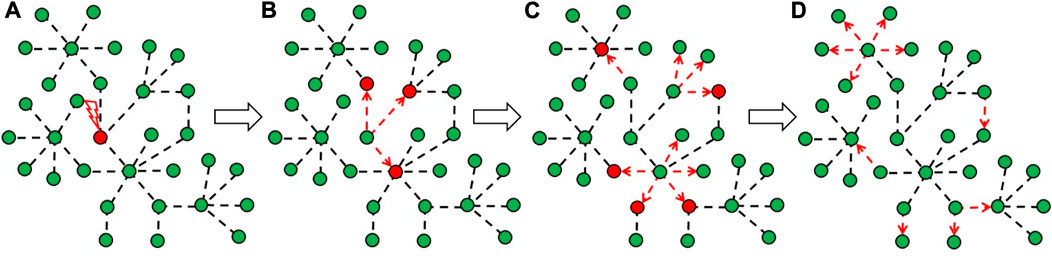
FIGURE 7. One of the possible schemes for spreading retweets on Twitter segment.
The proposed definition of effective EWMs can be used to find new effective EWMs, such as multifractal measures (e.g., see the paper [6]) and measures based on recurrences (e.g., see the paper [35]), which exhibit sharp changes when approaching
The used rules, topological structures of graphs, and pumping of sand cellular automata allowed us to study the efficiency of EWMs for bifurcation-induced tipping. But, this type of tipping is not limited to the study of the effectiveness of the measures, because by a suitable choice of local rules and pumping it is possible to observe noise-induced and rate-induced tipping in sand cell automata (e.g., see the paper [36]).
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
AD: Conceptualization, Formal Analysis, Investigation, Methodology, Validation, Writing–original draft, Writing–review and editing. AL: Conceptualization, Formal Analysis, Software, Supervision, Validation, Visualization, Writing–original draft, Writing–review and editing. VK: Conceptualization, Data curation, Formal Analysis, Funding acquisition, Project administration, Resources, Visualization, Writing–review and editing. VD: Conceptualization, Data curation, Funding acquisition, Investigation, Project administration, Supervision, Validation, Visualization, Writing–original draft.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. The work is an output of a research project implemented as part of the Basic Research Program at the National Research University Higher School of Economics (HSE University).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The reviewer VP declared a shared affiliation with the authors to the handling editor at the time of review.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Bak P, Tang C, Wiesenfeld K. Self-organized criticality: An explanation of the 1/f noise. Phys Rev Lett (1987) 59:381–4. doi:10.1103/PhysRevLett.59.381
2. di Santo S, Burioni R, Vezzani A, Muñoz MA. Self-organized bistability associated with first-order phase transitions. Phys Rev Lett (2016) 116:240601. doi:10.1103/PhysRevLett.116.240601
3. Buendia V, di Santo S, Bonachela JA, Muñoz MA. Feedback mechanisms for self-organization to the edge of a phase transition. Front Phys (2020) 8:1–17. doi:10.3389/fphy.2020.00333
4. Tebaldi C. Self-organized criticality in economic fluctuations: The age of maturity. Front Phys (2021) 8:616408. doi:10.3389/fphy.2020.616408
5. Stanley H, Amaral LAN, Buldyrev SV, Gopikrishnan P, Plerou V, Salinger MA. Self-organized complexity in economics and finance. PNAS (2002) 99:2561–5. doi:10.1073/pnas.022582899
6. Dmitriev A, Lebedev A, Kornilov V, Dmitriev V. Multifractal early warning signals about sudden changes in the stock exchange states. Complexity (2022) 2022:1–10. doi:10.1155/2022/8177307
7. Tadic D, Mitrović Dankulov M, Melnik R. Evolving cycles and self-organised criticality in social dynamics. Chaos, Solitons and Fractals (2023) 171:113459. doi:10.1016/j.chaos.2023.113459
8. Tadic B, Melnik R. Self-organised critical dynamics as a key to fundamental features of complexity in physical, biological, and social networks. Dynamics (2021) 1:181–97. doi:10.3390/dynamics1020011
9. Zhukov D. How the theory of self-organized criticality explains punctuated equilibrium in social systems. Methodological Innov (2022) 15:163–77. doi:10.1177/20597991221100427
10. Odagaki T. Self-organized wavy infection curve of COVID-19. Sci Rep (2012) 11:1936. doi:10.1038/s41598-021-81521-z
11. Pruessner G, Chapman SC, Crosby NB, Jensen HJ. 25 Years of self-organized criticality: Concepts and controversies. Space Sci Rev (2016) 198:3–44. doi:10.1007/s11214-015-0155-x
12. Plenz D, Ribeiro TL, Miller SR, Kells PA, Vakili A, Capek EL. Self-organized criticality in the brain. Front Phys (2021) 9:1–23. doi:10.3389/fphy.2021.639389
13. Jarai A. The sandpile cellular automaton. In: PY Louis, and F Nardi, editors. Probabilistic cellular automata. Emergence, complexity and computation (2018). 27. doi:10.1007/978-3-319-65558-1_6
14. Scheffer M, Bascompte J, Brock WA, Brovkin V, Carpenter SR, Dakos V, et al. Early-warning signals for critical transitions. Nature (2009) 461:53–9. doi:10.1038/nature08227
15. George S, Kachhara S, Ambika G. Early warning signals for critical transitions in complex systems. Physica Scripta (2023) 98:072002. doi:10.1088/1402-4896/acde20
16. Clarke J, Huntingford C, Ritchie PDL, Cox PM. Seeking more robust early warning signals for climate tipping points: The ratio of spectra method (ROSA). Environ Res Lett (2023) 18:035006. doi:10.1088/1748-9326/acbc8d
17. Proverbio D, Kemp F, Magni S, Gonçalves J. Performance of early warning signals for disease re-emergence: A case study on COVID-19 data. Plos Comput Biol (2022) 18:e1009958. doi:10.1371/journal.pcbi.1009958
18. Huang Y, Saleur H, Sammis C, Sornette D. Precursors, aftershocks, criticality and self-organized criticality. Europhysics Lett (1998) 41:43–8. doi:10.1209/epl/i1998-00113-x
19. Zhao L, Li W, Yang C, Han J, Su Z, Zou Y. Multifractality and network analysis of phase transition. PLoS ONE (2017) 12:e0170467. doi:10.1371/journal.pone.0170467
20. Lade S, Gross T. Early warning signals for critical transitions: A generalized modeling approach. Plos Comput Biol (2012) 8:e1002360. doi:10.1371/journal.pcbi.1002360
21. Tang Y, Zhu X, He C, Hu J, Fan J. Critical slowing down theory provides early warning signals for sandstone failure. Front Earth Sci (2022) 10:1–14. doi:10.3389/feart.2022.934498
22. Shaposnikov K. Random graph models and their application to twitter network analysis. In: Proceedings of the Fourth Workshop on Computer Modelling in Decision Making; 14-15 November 2019; Saratov, Russia (2019). p. 2589–4900.
23. Manna S. Two-state model of self-organized criticality. J Phys A (1991) 24:L363–9. doi:10.1088/0305-4470/24/7/009
24. Feder Y, Feder J. Self-organized criticality in a stick-slip process. Phys Rev Lett (1991) 66:2669–72. doi:10.1103/PhysRevLett.66.2669
25. Stoica P, Randolph M. Randolph M. Spectral analysis of signals. Upper Saddle River. NJ: Prentice Hall (2005).
26. Li M. Fractal time series - a tutorial review. Math Probl Eng (2010) 2010:1–26. doi:10.1155/2010/157264
27. Mallat S, Hwang W. Singularity detection and processing with wavelets. IEEE Trans Inform Theor (1992) 38:617–43. doi:10.1109/18.119727
29. Hegger R, Kantz H. Improved false nearest neighbor method to detect determinism in time series data. Phys Rev E (1999) 60:4970–3. doi:10.1103/PhysRevE.60.4970
30. Wallot S, Mønster D. Calculation of average mutual information (AMI) and false-nearest neighbors (FNN) for the estimation of embedding parameters of multidimensional time series in Matlab. Front Psychol (2018) 9:1–10. doi:10.3389/fpsyg.2018.01679
31. Rosenstein M, Collins JJ, De Luca CJ. A practical method for calculating largest Lyapunov exponents from small data sets. Physica D (1993) 65:117–34. doi:10.1016/0167-2789(93)90009-P
32. Tan J. Critical slowing down associated with regime shifts in the US housing market. Eur Phys J B (2014) 87:38. doi:10.1140/epjb/e2014-41038-1
33. Das M, Green JR. Critical fluctuations and slowing down of chaos. Nat Commun (2019) 10:2155. doi:10.1038/s41467-019-10040-3
34. Skyttner L. General systems theory: Problems, perspectives, practice. Singapore: World Scientific (2006).
35. Hasselman F. Early warning signals in phase space: Geometric resilience loss indicators from multiplex cumulative recurrence networks. Front Physiol (2022) 13:859127–18. doi:10.3389/fphys.2022.859127
Keywords: early warning signals, critical transition, self-organized criticality, self-organized bistability, sandpile cellular automata, wavelet transform, phase space reconstruction, early warning systems
Citation: Dmitriev A, Lebedev A, Kornilov V and Dmitriev V (2023) Effective precursors for self-organization of complex systems into a critical state based on dynamic series data. Front. Phys. 11:1274685. doi: 10.3389/fphy.2023.1274685
Received: 08 August 2023; Accepted: 06 September 2023;
Published: 22 September 2023.
Edited by:
Ming Li, Zhejiang University, ChinaReviewed by:
Ming Tang, East China Normal University, ChinaChanggui Gu, University of Shanghai for Science and Technology, China
Viktor Popov, National Research University Higher School of Economics, Russia
Copyright © 2023 Dmitriev, Lebedev, Kornilov and Dmitriev. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Andrey Dmitriev, YS5kbWl0cmlldkBoc2UucnU=