 Li Wang
Li Wang Chaoda Liu
Chaoda Liu Zihao Shang2
Zihao Shang2
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Phys., 25 July 2023
Sec. Interdisciplinary Physics
Volume 11 - 2023 | https://doi.org/10.3389/fphy.2023.1231313
This article is part of the Research TopicLearning, Modeling, and Applying Cooperation Mechanisms of Complex SystemsView all 6 articles
This research paper studies the consensus tracking control problem for a class of uncertain non-affine non-linear multi-agent systems (MASs). First, different from the separation design scheme using the mean value theorem in previous works, this research paper not only uses the mean value theorem but also introduces the Taylor decoupling method to decouple the complex unknown non-affine structure. Second, to solve the difficulty of unknown non-linear functions in non-linear MASs, an intelligent technique based on neural networks was used. In addition, compared with the existing traditional event-triggered control strategy based on the relative threshold, an improved event-triggered control strategy based on the decreasing function of error variables was introduced to reduce the waste of unnecessary resources. The theoretical result shows that the whole closed-loop system is stable under the action of the proposed control protocol. Finally, the simulation experiment verifies the effectiveness of our control method.
In recent years, with the rapid development of computer technology, problems related to MASs have also been the focus of many scholars. The system is mainly used in the fields of robotics, transportation, and human–machine interactions [1–7]. Particularly, MASs have higher performance and efficiency compared with expensive single systems; however, their control is more complex. The large-scale complex control problem of MASs can be solved through information exchange and coordination among agents. One of the most significant and essential areas of study in MAS cooperative control is the consensus problem. Early studies conducted extensive research on the consensus tracking control of linear MASs [8–10]. However, in recent years, consensus tracking control of non-linear MASs has received increasing attention [11,12].
In real-world industrial production, many objects cannot be modeled as systems with affine forms; therefore, the control design of non-affine non-linear systems has always been a key problem [13–17]. Furthermore, due to the needs of some practical tasks, such as supersonic vehicles and magnetic levitation systems [18–20], theoretical research on non-affine non-linear MASs is more meaningful and some non-affine non-linear MAS control methods have been proposed. Using a new class of implicit function and fuzzy logic technology, under the condition of switching topologies, the containment control problem of uncertain non-affine non-linear MASs with many dynamic leaders has been addressed [21]. Regarding the control problem of non-affine non-linear MASs, Wang and Song [22] proposed a distributed neural adaptive control scheme under the condition that the control gain is uneven. The aforementioned research showed that the implicit function or median theorems are widely used for controller decoupling. In contrast, the Taylor method used in the present study provides a new approach for controller decoupling.
The previous literature has shown that the event-triggered control (ETC) strategy is a good way to reduce sample data and traffic to design control strategies. In recent years, many researchers have adopted the ETC strategy to design control strategies [23–28]. An ETC strategy that follows the switching threshold was introduced to save communication resources, and the tracking control problem for stochastic non-linear pure-feedback MASs was solved [29]. Wu et al [30] proposed an improved ETC strategy that included ETC input and tracking error reduction function to update the actual control input. However, the aforementioned event-triggered strategies do not take into account the triggering rate, which is worth considering in the development of more efficient ETC strategies, and which motivates our work.
Based on the aforementioned findings, this research paper focuses on the consensus tracking control problem for non-affine non-linear MASs. According to the Taylor decoupling technique, a scheme of control input separation design for non-affine non-linear MASs is proposed to ensure the boundedness of all signals and achieve good consensus tracking. By introducing an improved ETC strategy, unnecessary resource waste is reduced. The following is a summary of the contributions made by this research paper: 1) to solve the coupling problem of non-affine non-linear MASs, the Taylor decoupling technology was used to effectively decouple the non-linear coupling functions. In addition, an intelligent technology based on neural networks was used to approximate unknown non-linear functions. 2) The previous literature used the fixed threshold ETC strategy to change the size of the control amplitude, with a constant measurement error [31]; in contrast, the relative threshold ETC considered in this study can adjust the system performance more flexibly. This research paper adopts an improved relative threshold ETC strategy to design the controller for each agent and introduces a decreasing function of error variables, which improves the efficiency of the ETC strategy by reducing the waste of communication resources.
Consider the topological structure of a MASs with one leader and multiple followers, which is represented by a
We consider the following class of non-affine non-linear MASs:
where
Our goal is to ensure that: 1) all signals in the closed-loop system fall within the specified compact set; and 2) the system output tracking error e1 = y − yd converges to zero.
Assumption 1: The external disturbance di, the reference signal yd, and its kth-order derivatives
Assumption 2:
Assumption 3 [30]: Based on Assumption 1, for a given compact set
where arbitrary Δ ∈ ΩΔ.
Lemma1: Let ΩΔ be given compact set of
Then, we use Taylor’s theorem to separate ui from
where
Substituting Eq. 4 into Eq. 3, we obtain
where
Therefore, from Eqs 3–5, Eq. 1 can be rewritten in the following affine form:
Lemma 2 [32]: Define the diagonal matrix
where
where κ = 0.2785.
Radial basis function neural networks (RBFNNs) can approximate arbitrary non-linear functions [11,33–35]. Specifically, the unknown non-linear functions
where
where
This section provides an efficient adaptive ETC strategy based on the adaptive neural approximation technique and a backstepping scheme.
The following error variables are defined:
where ui,k−1 is the virtual controller designed in step k.
Step 1: First, the derivation of ei,1 along (Eq. 11) is
The Lyapunov function is
where γi,1 is a positive design parameter,
From Eqs 13, 14, the derivative of Vi,1 is computed as
Consequently, taking Eq. 15 into account yields
where
Due to
where τi,1 > 0,
Furthermore, combining Lemma 4 with Eq. 18 and Young inequality results in
where ci,1 is a positive constant.
The virtual control ui,1 is constructed as
where ai,1 is a positive constant.
According to Assumption 3 and Eqs 17–20, we obtain
Then, the adaptive law
Substituting Eqs 22, 23 into Eq. 21, we obtain
Step
Similar to Eqs 14–17 in Step 1, the derivative of Vi,k can be computed as
where γi,k is an arbitrary constant.
In the same way, as in Eq. 15, we get
where
where for k = 2, take
Therefore, we obtain
Designing the virtual control ui,k as
where ci,k > 0 is the design constant.
We then get
The adaptive law
Substituting Eqs 28–33 into Eq. 31 yields
Step ni: At this step, define
The Lyapunov function is
Then,
where
From Eqs 35, 36, the derivative of
where
Furthermore,
Hence, the virtual control signal is designed as
where
Substituting Eqs 34–40 into Eq. 35, we have
Furthermore, the actual ETC input strategy is as follows:
where ec(t) = v(t) − u(t),
According to Eq. 44,
Then,
Substituting Eqs 42–45 into Eq. 41, one obtains
Remark 1: The newly introduced decreasing function en(t) gives a higher triggering threshold when the tracking error ek, k = 1, 2, …, n is very small. According to
We are now prepared to state the main results of this research after the analysis mentioned previously.
Theorem 1: Consider the non-linear MASs (Eq. 1) satisfying Assumption 2. For bounded initial conditions, the virtual control signals (Eqs 20, 30, 40), adaptive laws (Eqs 22, 31), and the tracking control protocol (Eq. 43) based on Assumptions 1–3 are obtained. The whole controller design process ensures that the signals of all closed-loop systems are bounded.
Proof: The derivative of
where
From Eq. 47, one obtains
where
Furthermore, Eq. 48 satisfies
From Eq. 49,
Theoretically, the following inequality can be made to hold by choosing the design parameters ai,k, ci, γi correctly based on the definitions of ϖ and β
where arbitrary ς > 0.
Lemma 3 states that the result limt→∞‖Y–Yc‖ ≤ ς may be obtained by selecting the proper parameters, which implies that the system output is guaranteed to converge to a tiny finite error.
We can find t* > 0 such that the
We know that
In this section, we will verify the effectiveness of the designed control strategy through a numerical example. Consider the following second-order non-affine non-linear system. The system’s communication structure is shown in Figure 1, where node 0 represents a virtual leader. It is obvious that only follower 1 is capable of receiving the leader’s signal. The system model is given by the following formula:
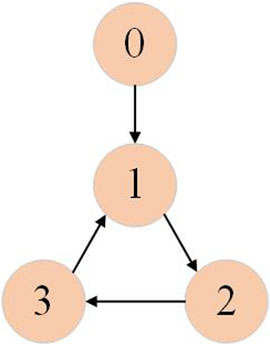
FIGURE 1. Communications topology.
The aforementioned non-linear functions are g11 = 1 + sin(x11 + 1), f11 = 0.6 cos(x11), g12 = 1 + sin(x12), C1 = 2 cos(x12), d1 = 0.1 sin(x12), g21 = sin(x21 + 1), f21 = 0.8 cos(x21), g22 = 1 − sin(x22), C2 = 0.8 cos(x22),
Concomitantly, we get the simulation results in Figures 2–7. Figure 2 shows that the actual output of the studies' systems can track well with the expected trajectory yr. Figure 3 shows the error between the output signals and the expected signal. Figure 4 shows the adaptive parameter curves of each follower. The curves of the controller are shown in Figures 5–7. Figure 8 shows the event-triggered times and the threshold value comparisons of the two methods.
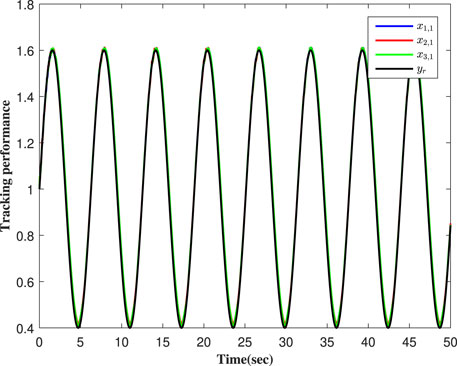
FIGURE 2. Output trajectories of the followers and leader.
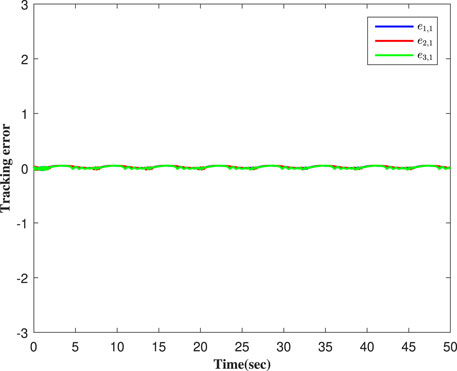
FIGURE 3. Trajectories of the tracking error.
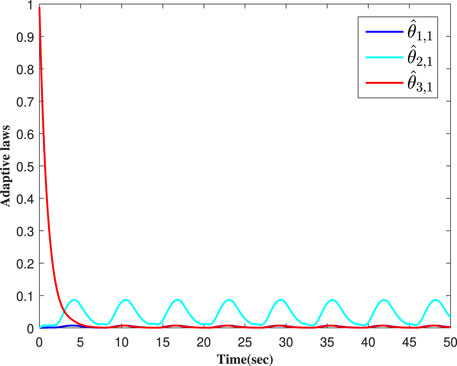
FIGURE 4. Trajectories of the adaptive law
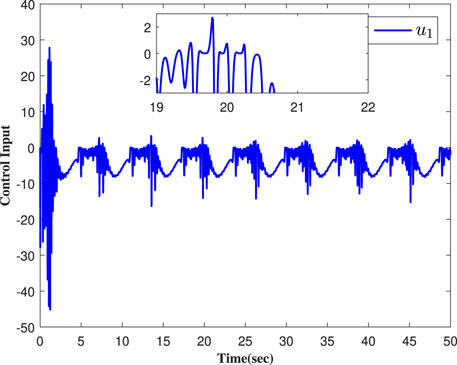
FIGURE 5. Trajectories of the control input u1.
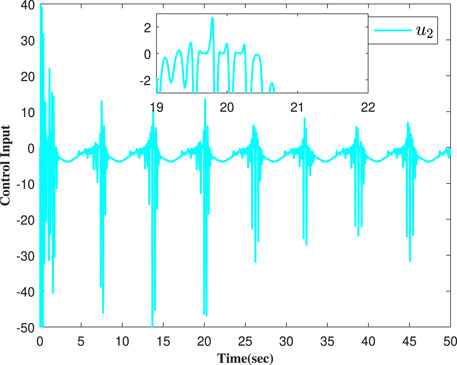
FIGURE 6. Trajectories of the control input u2.
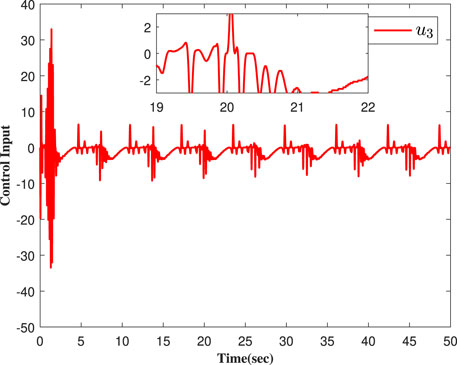
FIGURE 7. Trajectories of the control input u3.
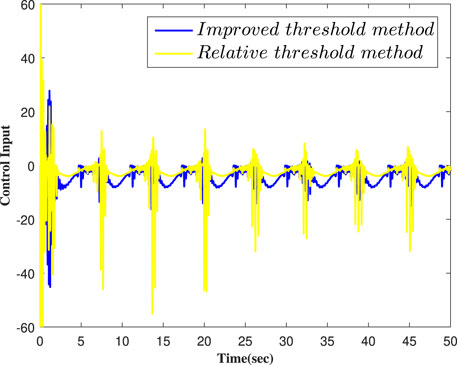
FIGURE 8. Threshold value of the proposed improved method compared with those of other methods.
This research investigates the consensus tracking control problem for a class of non-affine non-linear MAS and proposes a design scheme for control input separation. The Taylor decoupling technology is used to successfully decouple the control inputs with the non-affine non-linear terms. Then, the unknown non-linear functions that exist in the non-affine non-linear MASs are approximated using RBFNNs. Moreover, an improved ETC strategy is proposed, which introduces a decreasing function to improve the performance of the ETC strategy. This ETC strategy significantly reduces the computational burden of the communication process and achieves better control objectives. The designed control strategy ensures the boundedness of all signals and achieves good consensus tracking performance. In the future, we will focus on extending the proposed method to MASs with more general structures and malicious attacks.
The original contributions presented in the study are included in the article/Supplementary material. Further inquiries can be directed to the corresponding author.
LW, ZS, and CL contributed to the study idea and design. LW wrote the first draft of the manuscript. LW organized the literature. ZS designed the figures. LC verified the experimental design. All authors contributed to the article and approved the submitted version.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
1. Zhang Z, Hao F, Zhang L, Wang L. Consensus of linear multi-agent systems via event-triggered control. Int J Control (2014) 87:1243–51. doi:10.1080/00207179.2013.873952
2. Zhou J, Wang Y, Zheng X, Wang Z, Shen H. Weighted $${\mathcal {H}}_{\infty }$$ H ∞ consensus design for stochastic multi-agent systems subject to external disturbances and ADT switching topologies. Nonlinear Dyn (2019) 96:853–68. doi:10.1007/s11071-019-04826-9
3. Xiao H, Li Z, Chen CP. Formation control of leader–follower mobile robots’ systems using model predictive control based on neural-dynamic optimization. IEEE Trans Ind Elect (2016) 63:5752–62. doi:10.1109/tie.2016.2542788
4. Alonso-Mora J, Montijano E, Nägeli T, Hilliges O, Schwager M, Rus D. Distributed multi-robot formation control in dynamic environments. Autonomous Robots (2019) 43:1079–100. doi:10.1007/s10514-018-9783-9
5. Rossi E, Tognon M, Carli R, Schenato L, Cortés J, Franchi A. Cooperative aerial load transportation via sampled communication. IEEE Control Syst Lett (2019) 4:277–82. doi:10.1109/lcsys.2019.2924413
6. Daugherty G, Reveliotis S, Mohler G. Optimized multiagent routing for a class of guidepath-based transport systems. IEEE Trans Automation Sci Eng (2018) 16:363–81. doi:10.1109/tase.2018.2798630
7. Liu Y, Montenbruck JM, Zelazo D, Odelga M, Rajappa S, Bülthoff HH, et al. A distributed control approach to formation balancing and maneuvering of multiple multirotor uavs. IEEE Trans Robotics (2018) 34:870–82. doi:10.1109/tro.2018.2853606
8. Hu J, Feng G. Distributed tracking control of leader–follower multi-agent systems under noisy measurement. Automatica (2010) 46:1382–7. doi:10.1016/j.automatica.2010.05.020
9. Zhu W, Cheng D. Leader-following consensus of second-order agents with multiple time-varying delays. Automatica (2010) 46:1994–9. doi:10.1016/j.automatica.2010.08.003
10. Hong Y, Chen G, Bushnell L. Distributed observers design for leader-following control of multi-agent networks. Automatica (2008) 44:846–50. doi:10.1016/j.automatica.2007.07.004
11. Shang Y, Chen B, Lin C. Consensus tracking control for distributed nonlinear multiagent systems via adaptive neural backstepping approach. IEEE Trans Syst Man, Cybernetics: Syst (2018) 50:2436–44. doi:10.1109/tsmc.2018.2816928
12. Liang H, Liu G, Zhang H, Huang T. Neural-network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties. IEEE Trans Neural Networks Learn Syst (2020) 32:2239–50. doi:10.1109/tnnls.2020.3003950
13. Liu Y-J, Wang W. Adaptive fuzzy control for a class of uncertain nonaffine nonlinear systems. Inf Sci (2007) 177:3901–17. doi:10.1016/j.ins.2007.03.005
14. Wang M, Liu X, Shi P. Adaptive neural control of pure-feedback nonlinear time-delay systems via dynamic surface technique. IEEE Trans Syst Man, Cybernetics, B (Cybernetics) (2011) 41:1681–92. doi:10.1109/tsmcb.2011.2159111
15. Na J, Ren X, Zheng D. Adaptive control for nonlinear pure-feedback systems with high-order sliding mode observer. IEEE Trans Neural networks Learn Syst (2013) 24:370–82. doi:10.1109/tnnls.2012.2225845
16. Zhou J, Xu S. Curcumin-loaded porous scaffold: An anti-angiogenic approach to inhibit endochondral ossification. IEEE Trans Fuzzy Syst (2023) 2023:1–26. doi:10.1080/09205063.2023.2231663
17. Wang D, Liu D, Wei Q, Zhao D, Jin N. Optimal control of unknown nonaffine nonlinear discrete-time systems based on adaptive dynamic programming. Automatica (2012) 48:1825–32. doi:10.1016/j.automatica.2012.05.049
18. Zhang Q, Wang C. Robust adaptive backstepping control for a class of constrained non-affine nonlinear systems via self-organizing hermite-polynomial-based neural network disturbance observer. Adv Mech Eng (2017) 9:168781401770281. doi:10.1177/1687814017702811
19. Zhang S, Wang Q, Dong C. Extended state observer based control for generic hypersonic vehicles with nonaffine-in-control character. ISA Trans (2018) 80:127–36. doi:10.1016/j.isatra.2018.05.020
20. Boulkroune A, M’Saad M, Farza M. Fuzzy approximation-based indirect adaptive controller for multi-input multi-output non-affine systems with unknown control direction. IET Control Theor Appl (2012) 6:2619–29. doi:10.1049/iet-cta.2012.0565
21. Wang W, Wang D, Peng Z. Distributed containment control for uncertain nonlinear multi-agent systems in non-affine pure-feedback form under switching topologies. Neurocomputing (2015) 152:1–10. doi:10.1016/j.neucom.2014.11.035
22. Wang Y, Song Y. Fraction dynamic-surface-based neuroadaptive finite-time containment control of multiagent systems in nonaffine pure-feedback form. IEEE Trans Neural networks Learn Syst (2016) 28:678–89. doi:10.1109/tnnls.2015.2511005
23. Zhou J, Xu D, Tai W, Ahn CK. Switched event-triggered $\mathcal {H}_{\infty }$ security control for networked systems vulnerable to aperiodic DoS attacks. IEEE Trans Netw Sci Eng (2023) 10:2109–23. doi:10.1109/tnse.2023.3243095
24. Chen Z, Niu B, Zhao X, Zhang L, Xu N. Model-based adaptive event-triggered control of nonlinear continuous-time systems. Appl Math Comput (2021) 408:126330. doi:10.1016/j.amc.2021.126330
25. Li H, Chen Z, Wu L, Lam H-K. Event-triggered control for nonlinear systems under unreliable communication links. IEEE Trans Fuzzy Syst (2016) 25:813–24. doi:10.1109/tfuzz.2016.2578346
26. Xing L, Wen C, Liu Z, Su H, Cai J. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans automatic Control (2016) 62:2071–6. doi:10.1109/tac.2016.2594204
27. Hu X, Li Y-X, Hou Z. Event-triggered fuzzy adaptive fixed-time tracking controlfor nonlinear systems. IEEE Trans Cybernetics (2020) 52:7206–17. doi:10.1109/tcyb.2020.3035779
28. Li Y-X, Hu X, Che W, Hou Z. Event-based adaptive fuzzy asymptotic tracking control of uncertain nonlinear systems. IEEE Trans Fuzzy Syst (2020) 29:3003–13. doi:10.1109/tfuzz.2020.3010643
29. Liu C, Niu B, Liu L, Zhao X, Wang H, Duan H. Event-triggered adaptive bipartite asymptotic tracking control using intelligent technique for stochastic nonlinear multi-agent systems. IEEE Trans Artif Intelligence (2022) 2022:1–11. doi:10.1109/tai.2022.3214486
30. Wu L-B, Park JH, Xie X-P, Gao C, Zhao N-N. Fuzzy adaptive event-triggered control for a class of uncertain nonaffine nonlinear systems with full state constraints. IEEE Trans Fuzzy Syst (2020) 29:904–16. doi:10.1109/tfuzz.2020.2966185
31. Liu L, Li X, Liu Y-J, Tong S. Neural network based adaptive event trigger control for a class of electromagnetic suspension systems. Control Eng Pract (2021) 106:104675. doi:10.1016/j.conengprac.2020.104675
32. Zhang H, Lewis FL, Qu Z. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Trans Ind Electron (2011) 59:3026–41. doi:10.1109/tie.2011.2160140
33. Shahvali M, Shojaei K. Distributed adaptive neural control of nonlinear multi-agent systems with unknown control directions. Nonlinear Dyn (2016) 83:2213–28. doi:10.1007/s11071-015-2476-4
34. Wang X, Niu B, Wang X. Distributed adaptive bipartite consensus tracking of high-order nonstrict-feedback nonlinear multi-agent systems. J Control Decis (2022) 10:393–401. doi:10.1080/23307706.2022.2085196
Keywords: adaptive control, consensus tracking control, non-affine non-linear multi-agent system, Taylor decoupling, event-triggered strategy control
Citation: Wang L, Liu C and Shang Z (2023) Adaptive consensus tracking control of non-affine non-linear MASs based on Taylor decoupling technology and an event-triggered design strategy. Front. Phys. 11:1231313. doi: 10.3389/fphy.2023.1231313
Received: 30 May 2023; Accepted: 06 July 2023;
Published: 25 July 2023.
Edited by:
Duxin Chen, Southeast University, ChinaReviewed by:
Guoliang Chen, Liaocheng University, ChinaCopyright © 2023 Wang, Liu and Shang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Li Wang, d2FuZ2xpX3NkdW1AMTYzLmNvbQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.