 Jiashuo Sun
Jiashuo Sun Linying Xiang
Linying Xiang Guanrong Chen
Guanrong Chen
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Phys., 23 January 2023
Sec. Interdisciplinary Physics
Volume 11 - 2023 | https://doi.org/10.3389/fphy.2023.1129844
This article is part of the Research TopicAdvances in Nonlinear Systems and NetworksView all 13 articles
In this article, dynamical robustness of a directed complex network with additive noise is inverstigated. The failure of a node in the network is modeled by injecting noise into the node. Under the framework of mean-square stochastic stability, a new robustness metric is formulated to characterize the robustness of the network in terms of synchronization to the additive noise. It is found that the node dynamics plays a pivotal role in dynamical robustness of the directed network. Numerical simulations are shown for illustration and verification.
In practical applications, power grids [1, 2], communication networks, secure communication [3] and public transportation systems [4, 5] often encounter failures and attacks [6–9]. A failure of a very small fraction of nodes in a network may lead to complete fragmentation of the whole network. Therefore, the robustness of complex networks subjected to failures or attacks is an important issue to study in network science and engineering [10]. Exploring the network robustness can help better understand various networked systems and enable us to design more robust infrastructural or social systems.
In the past 2 decades, the issue of network robustness has attracted a lot of attention [10–15]. Most of the previous works focus on the structural robustness of complex networks, which is defined as the ability to maintaining their functionalities when they are disturbed or attacked [16, 17]. Therein, the failure of a node or an edge in the network is modeled by the removal of the node or the edge. To quantify structural robustness of complex networks, many measures with respect to the network structure have been formulated, such as connectivity, maximum strongly connected subgraph, natural connectivity, and average shortest path [18, 19]. Moreover, a variety of attack strategies, such as random attack and deliberate attack, have been proposed to test the robustness of different kinds of networks [20–22]. The structural robustness of complex networks can also be measured using some metrics derived from statistical physics and percolation theory [23].
Recently, the network robustness with respect to the system dynamics has stimulated even more interest [24–26]. A new concept of dynamical robustness [27] can be used to quantify the ability of a network to maintain its dynamical activities against local perturbations. Different from structural robustness where topological perturbations are considered, dynamical robustness is concerned with the robustness of network dynamics. In [27], node failure is modeled as the inactivation of diffusively coupled oscillators. In [28], dynamical robustness is quantified through the synchronization error as a function of the noise variance, where node failure is modeled by injecting noise into a node. In [29], a mathematical framework is established to quantify the effect of noise injected at one of the nodes on the synchronization performance of coupled dynamical systems. Indeed, noise is inevitable in real-world networks [30, 31]. It is natural to ask whether a networked system subjected to noise can recover to its synchronous state? On the one hand, noise may destroy the network’s stability and prevent network synchronization [32, 33]. On the other hand, noise-induced synchronization can be beneficial for coupled chaotic systems [34]. In order to clarify the influence of noise on the network, in [35] networks of different structure and complexity are analyzed, showing that many networks are better in coping with both intrinsic and extrinsic noise.
Motivated by the above discussions, this article further investigates the dynamical robustness of stochastic complex networks. The network topology is directed and the nodes are higher-dimensional non-linear dynamical systems. Similar to [29], the failure of a node in the network is modeled by injecting noise into the node. However, differing from [29], in this article it is not assumed that the network is symmetric. From a technical perspective, this introduces more challenges than its undirected counterpart [36]. A novel metric measuring the dynamical robustness of a directed networked system with additive noise is formulated. Notice that the proposed robustness metric uncovers the complex interplay between node dynamics and network topology on the overall network robustness.
The main contributions of this article are as follows. First, a mathematical framework is established to examine the dynamical robustness of a directed network of coupled dynamical systems. In this article, the notion of dynamical robustness refers to the ability of a network of coupled dynamical systems to return to its synchronous state when it encounters the disturbance of noise. The new metric is used to characterize the degree to which the networked system withstand failures and perturbations. Assume that the networked system synchronizes before the noise is introduced. The system’s robustness is defined related to the synchronization error of the network. Moreover, different from the methods used for undirected networks, the Laplacian matrix of a directed network is decomposed to two simpler matrices. In the context of mean-square stochastic stability, the new robustness metric is precisely formulated. This metric highlights the importance of the node dynamics in network robustness. Finally, numerical simulations are presented for illustration and verification using three chaotic systems (namely, Rössler system, Chen system and Wang system). The study of dynamical robustness can help better understand the roles of node dynamics and network topology, thereby better designing noise-tolerant networks.
The remainder of this article is organized as follows. Section 2 introduces the notation and some basic graph theory. In Section 3, problem formulation is presented and a new robustness metric is formulated. In Section 4, numerical simulations are shown for illustration and verification. Section 5 concludes the investigation.
Let
A directed graph
For the anti-symmetric matrix Δ, the following lemma is obtained.
Lemma 1. Let
where 0, … , 0, ±b1j, … , ±blj (bi ≠ 0) are the eigenvalues of the matrix Δ. Here,
Proof: Let μ1 = b1j be an eigenvalue of Δ and χ1 the corresponding eigenvector. Let
Recall that Δ is anti-symmetric. Consequently, it is a normal matrix and is unitary similar to a diagonal matrix. Particularly, let
Let
Because p is a unitary matrix,
Consider a directed network consisting of N identical nodes with linearly diffusive couplings, in which each node is an n-dimensional dynamical system. The network can be described by the following coupled stochastic differential equation:
where
For network (3),
where uij is the (i, j)th element of U and δij is the (i, j)th element of Δ.
The network is said to achieve synchronization if
Define the node synchronization error ξi(t) = xi(t) − s(t). The linearized error system is given by
where
Let
where
The objective is to provide a thorough analysis of (6) to illustrate the overall effect of noise on network synchronization. Define the network synchronization error as
The expected value of ϕ(t) is given by
Let
Notice that the solution of (6) is
where Φξ(t, τ) is the state transition matrix associated with the state matrix IN ⊗ Jf(s) − αU ⊗ Jh(s) − αΔ ⊗ Jh(s), and ξ(0) is the initial value. Recall that η(t) is a zero-mean Gaussian white noise with variance
Recall the definition of the matrix C in Lemma 1. Particularly, let C = [c1, … , cN],
Since the trace of a matrix does not change under a similarity transformation, one has
where
The dynamics of
where mii is the ith diagonal element of M.
Let
Rewrite (16) as follows:
where Vec indicates matrix vectorization defined in Section 2.1. The solution of (17) is given by
where
Based on (14)–(18), the expectation of the network synchronization error can be rewritten as
In the following, consider the stochastic linear system (6), where Jf(s) and Jh(s) are Jacobian matrics of f and h evaluated at s(t), respectively. Constant α > 0 is the coupling strength and
Remark 1. It follows from the above analysis that the robustness of the directed network subjected to noise is quantified by the robustness metric ρ. Here, the networked system synchronizes before noise is introduced. The notion of dynamical robustness refers to the ability of a network of coupled dynamical systems to return to its synchronous state after it encountered the disturbance of noise. The robustness metric ρ is used to characterize the degree to which the networked system withstand failures and perturbations. It is thus defined related to the synchronization error of the network. The smaller the value of ρ, the more robust the network. Furthermore, given the location of the node where noise is injected, the dynamical robustness of the network depends not only on the node dynamics but also on the network topology. In particular, it is determined by the inherent dynamics of the isolated node Jf(s), the inner-coupling function Jh(s), the coupling strength α, the variance θ of the noise, and the network topology. Note that Jf(s) and Jh(s) are the Jacobian matrices of f and h evaluated at s(t), respectively. This implies that the robustness matric ρ is also determined by the synchronization trajectory s(t).
In this section, the effects of node dynamics and network topology on the system robustness are investigated in detail.
In the following, three representative non-linear systems, namely, Rössler system, Chen system, and Wang system, are introduced. In simulations, these three systems with chaotic behaviors are adopted as the self-dynamics of the nodes, respectively.
A single Rössler system [39] is described by
which has a chaotic attractor when
A single Chen system [40] is described by
which has a chaotic attractor when a = 35, b = 3, and c = 28. The Jacobian matrix evaluated at
A single Wang system [41] is described by
which has a chaotic attractor when a = 0.006. The Jacobian matrix evaluated at
In simulations, consider a directed path graph with five nodes. Assume that θ = 1. The noise is injected into the fourth node and the third state variable of this node, that is the fourth element of υ is one and
Figure 1 shows the simulation results for the network of Rössler systems. Assume that the nodes are coupled on the second and third variables thereby Jh(s) = [0,0,0; 0.1,0; 0,0,1]T. As can be seen from Figure 1A, the robustness metric ρ first continuously oscillates and then converges to around zero with the increase of the coupling strength α. As shown in Figure 1B, the synchronization error exhibits a similar behavior.
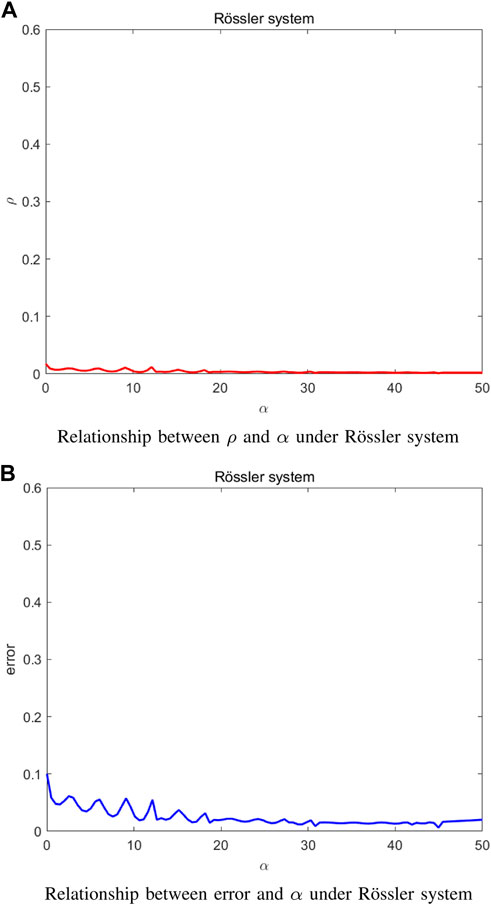
FIGURE 1. The results are obtained under Rössler systems when a directed path graph is considered.
Figure 2 shows the simulation results for the network of Chen systems. Assume that the nodes are coupled through all state variables thereby Jh(s) = [1,0,0;0,1,0;0,0,1]T. It is interesting to see from Figure 2A that, after a sharp fall, the robustness metric ρ begins to continuously oscillate and then converges to zero with the increase of the coupling strength α. Figure 2B shows that the synchronization error exhibits a similar behavior of the robustness metric.
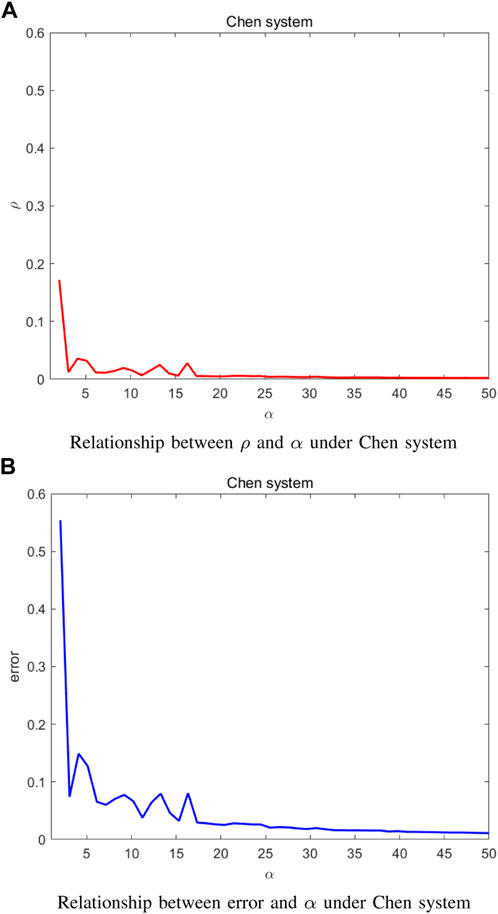
FIGURE 2. The results are obtained under Chen systems when a directed path graph is considered.
Figure 3 illustrates the results for the network of Wang systems. Assume that the nodes are coupled on the first and third variables thereby Jh(s) = [1,0,0; 0,0,0; 0,0,1]T. It follows from Figure 3A that the robustness metric first sharply decreases and gradually converges to zero with the increase of the coupling strength. Also, the synchronization error approaches to zero when the coupling strength increases.
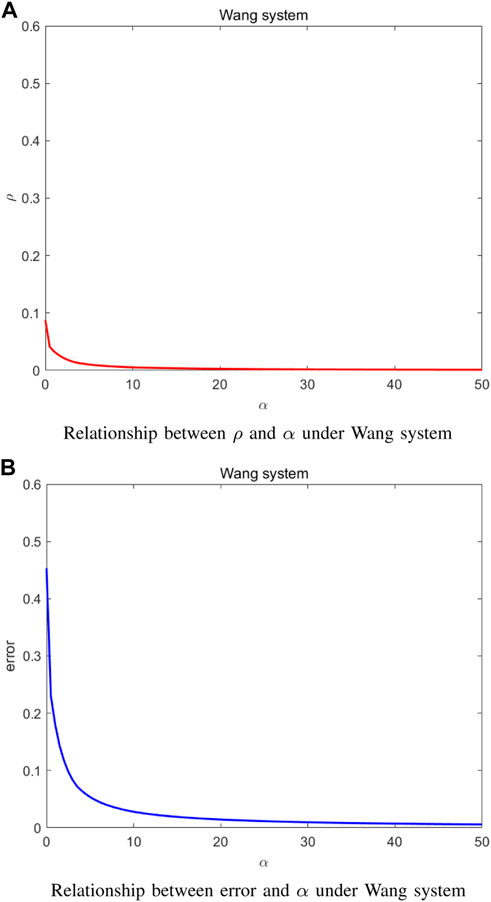
FIGURE 3. The results are obtained under Wang systems when a directed path graph is considered.
Recall that the networked system synchronizes before the noise is introduced. This means that the choice of Jh(s) in the simulation section can ensure the existence of the synchronized region.
In this subsection, consider a general directed graph [42] as shown in Figure 4. Assume that noise is injected into the fourth node, so the element of υ is one into the fourth row and others are 0. In addition, θ = 1 and
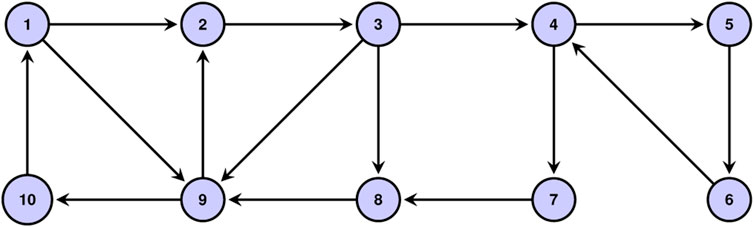
FIGURE 4. Network topology.
Figures 5A, B are obtained under Rössler systems with Jh(s) = [0,0,0; 0.1,0; 0,0,1]T. Notice that a much more complex scenario emerges. The robustness metric increases rapidly with intermittent descent when the coupling strength is larger than 19. From Figure 5B, the synchronization error decreases after continuously oscillating. When the coupling strength is larger than 19, the synchronization error begins to increase rapidly with intermittent descent.
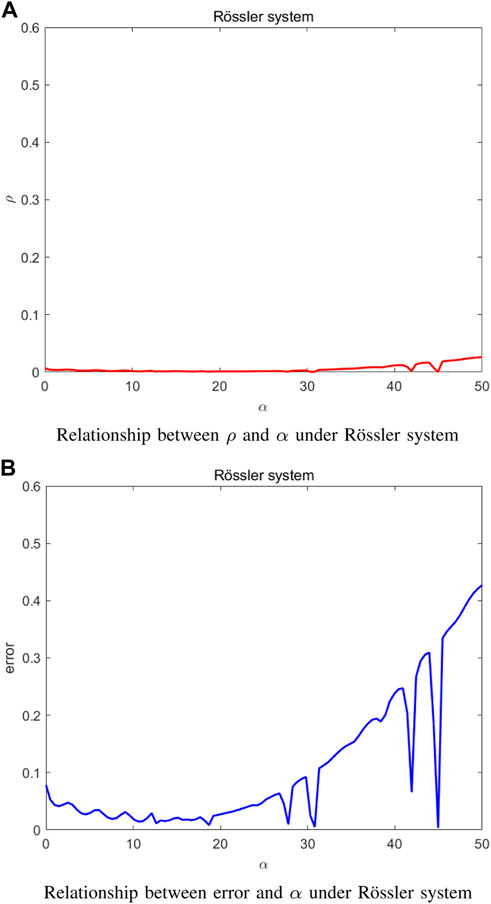
FIGURE 5. The results are obtained under Rössler systems when a general directed graph is considered.
Figures 6A, B are obtained under Chen systems with Jh(s) = [1,0,0; 0.1,0; 0,0,1]T. After a sharp fall, the robustness metric is monotonically decreasing. The synchronization error exhibits a similar behavior to the robustness metric.
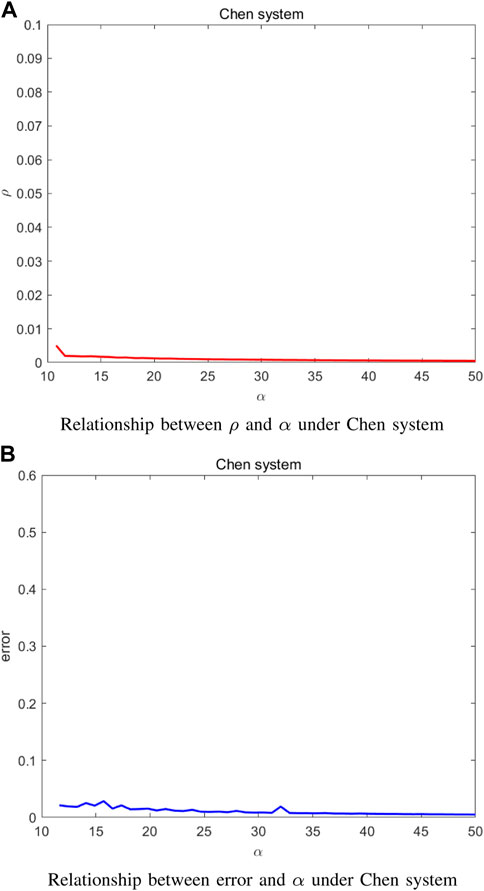
FIGURE 6. The results are obtained under Chen systems when a general directed graph is considered.
Figures 7A, B are obtained under Wang systems with Jh(s) = [1,0,0; 0.0,0; 0,0,1]T. When the coupling strength gradually increases, the curves in Figure 7A and Figure 7B both converge to zero, which illustrates that the network of Wang systems is robust to noise and can reach the synchronization when the coupling strength is enough large.
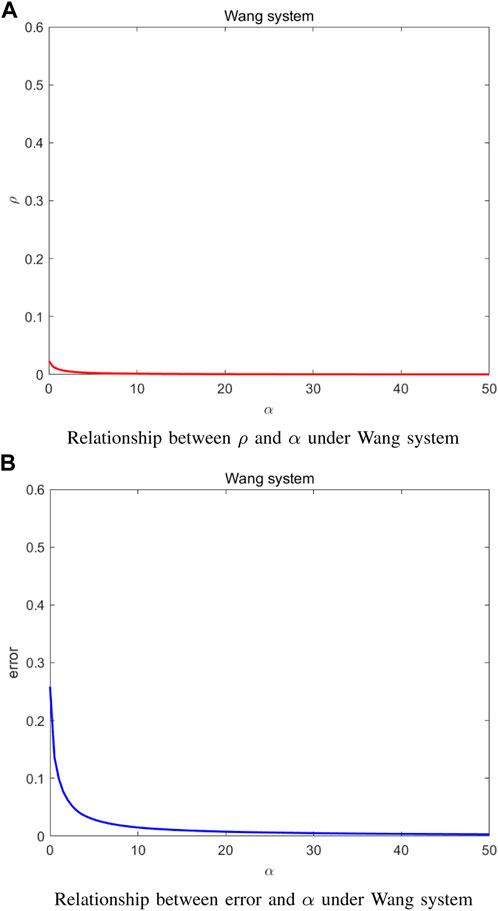
FIGURE 7. The results are obtained under Wang systems when a general directed graph is considered.
In summary, the 10-node network of Rössler systems shows greatly different robustness from other systems.
In order to illustrate the effect of the location of the injected noise, the robustness metrics are examined in Figure 8 for Rössler system, Chen system, and Wang system, respectively, all with α = 20. Recall that a smaller value of ρ implies a more dynamically robust network. It is clear that, for Rössler system, Chen system, and Wang system, the network shows a similar robustness. The results shown in Figure 8 provide guidance for minimizing the effect of noise on the network robustness. For example, the network is more robust to noise if node five is subjected to noise. Therefore, node five is the best choice to minimize the effect of noise from the dynamical robustness perspective.
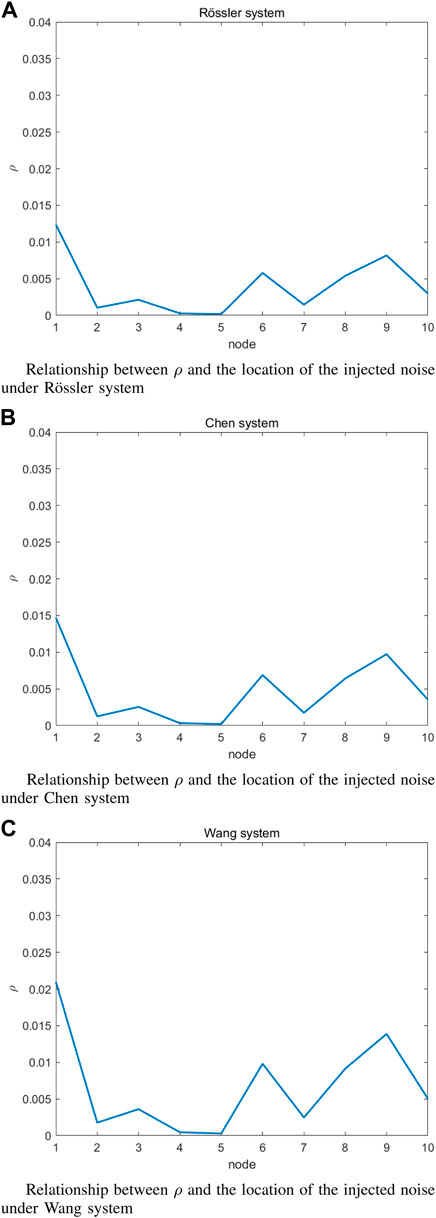
FIGURE 8. The main results are obtained under a general directed graph: α = 20.
This article investigates the dynamical robustness of a directed network with noise. A novel robustness metric is formulated and analyzed under the framework of mean-square stochastic stability. It is found that the dynamical robustness of the directed network is determined by both the node dynamics and the network topology. Particularly, for networks of Rössler systems, with the increase of the coupling strength, different network topologies show different effects on the robustness metric. While for Wang systems, the robustness to noise is stronger than other systems. These findings demonstrate that node dynamics plays an important role in the network robustness. The results of this study can provide theoretical and technical guidances for designing a dynamically robust networked system.
In the future, it will be interesting to investigate dynamical robustness of higher-order networks [37, 43]. Moreover, it will be interesting to investigate the effects of different types of noise on the network robustness. The dynamical robustness of stochastic complex networks with time-delays [44] or heterogeneous node dynamics [45] are challenging but also worthy of further investigation.
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
All authors designed and did the research. JS and LX did the analytical and numerical calculations. JS, LX, and GC were the lead writer of the manuscript. All authors read and approved the final manuscript.
This work was supported by the National Natural Science Foundation of China (No. 61973064), Natural Science Foundation of Hebei Province of China (No. F2022501024), Hebei Provincial Postgraduate Student Innovation Ability Training Funding Project (No. CXZZSS2023202), and Hong Kong Research Grants Council under the GRF Grant CityU11206320.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
1. Wu J, Yu X, Li X. Global frequency synchronization of complex power networks via coordinating switching control. IEEE Trans Circuits Syst Regular Pap (2019) 66:3123–33. doi:10.1109/tcsi.2019.2908085
2. Mingotti A, Peretto L, Tinarelli R. Accuracy evaluation of an equivalent synchronization method for assessing the time reference in power networks. IEEE Trans Instrumentation Meas (2018) 67:600–6. doi:10.1109/tim.2017.2779328
3. Yu F, Shen H, Yu Q, Kong X, Kumar Sharma P, Cai S. Privacy protection of medical data based on multi-scroll memristive hopfield neural network. IEEE Trans Netw Sci Eng (2022) 1–14:1–14. doi:10.1109/tnse.2022.3223930
4. Wu J, Liu M, Sun H, Li T, Gao Z, Wang DZ. Equity-based timetable synchronization optimization in urban subway network. Transportation Res C: Emerging Tech (2015) 51:1–18. doi:10.1016/j.trc.2014.11.001
5. Liu T, Ceder A. Synchronization of public transport timetabling with multiple vehicle types. Transportation Res Rec (2016) 2539:84–93. doi:10.3141/2539-10
6. Buldyrev SV, Parshani R, Paul G, Stanley HE, Havlin S. Catastrophic cascade of failures in interdependent networks. Nature (2010) 464:1025–8. doi:10.1038/nature08932
7. Zhang L, Xiang L, Zhu J. Relationship between fragility and resilience in complex networks. Physica A (2022) 605:128039. doi:10.1016/j.physa.2022.128039
8. Mao B, Wu X, Lü J, Chen G. Predefined-time bounded consensus of multiagent systems with unknown nonlinearity via distributed adaptive fuzzy control. IEEE Trans Cybernetics (2022) 1–14. doi:10.1109/tcyb.2022.3163755
9. Zhu Y, Xia C-Y, Wang Z, Chen Z. Networked decision-making dynamics based on fair, extortionate and generous strategies in iterated public goods games. IEEE Trans Netw Sci Eng (2022) 9(4):2450–62. doi:10.1109/tnse.2022.3164094
10. Lou Y, Wu R, Li J, Wang L, Tang C-B, Chen G. Classification-based prediction of network connectivity robustness. Neural Networks (2023) 157:136–46. doi:10.1016/j.neunet.2022.10.013
11. Callaway DS, Newman ME, Strogatz SH, Watts DJ. Network robustness and fragility: Percolation on random graphs. Phys Rev Lett (2000) 85(25):5468–71. doi:10.1103/physrevlett.85.5468
12. Wang X, Pournaras E, Kooij RE, Mieghem PV. Improving robustness of complex networks via the effective graph resistance. The Eur Phys J B (2014) 87:221–12. doi:10.1140/epjb/e2014-50276-0
13. Liu X, Sun S, Wang J, Xia C. Onion structure optimizes attack robustness of interdependent networks. Physica A (2019) 535:122374. doi:10.1016/j.physa.2019.122374
14. Liao L, Shen Y, Liao J. Robustness of dispersal network structure to patch loss. Ecol Model (2020) 424:109036. doi:10.1016/j.ecolmodel.2020.109036
15. Huang D, Bian J, Jiang H, Yu Z. Consensus indices of two-layered multi-star networks: An application of Laplacian spectrum. Front Phys (2021) 9:803941. doi:10.3389/fphy.2021.803941
16. Liu X, Li D, Ma M, Szymanski BK, Stanley HE, Gao J. Network resilience. Phys Rep (2022) 971:1–108. doi:10.1016/j.physrep.2022.04.002
17. Nie S, Wang X-W, Zhang H, Li Q, Wang B. Robustness of controllability for networks based on edge-attack. PLoS ONE (2014) 9:e89066. doi:10.1371/journal.pone.0089066
18. Shargel B, Sayama H, Epstein IR, Bar-Yam Y. Optimization of robustness and connectivity in complex networks. Phys Rev Lett (2003) 90(6):068701. doi:10.1103/physrevlett.90.068701
19. Schwartz N, Cohen R, Ben-Avraham D, Barabási A-L, Havlin S. Percolation in directed scale-free networks. Phys Rev E (2002) 66(1):015104. doi:10.1103/physreve.66.015104
20. Albert R, Jeong H, Barabási A-L. Error and attack tolerance of complex networks. Nature (2000) 406(6794):378–82. doi:10.1038/35019019
21. Holme P, Kim BJ, Yoon CN, Han SK. Attack vulnerability of complex networks. Phys Rev E (2002) 65(5):056109. doi:10.1103/physreve.65.056109
22. Cohen R, Erez K, Ben-Avraham D, Havlin S. Breakdown of the internet under intentional attack. Phys Rev Lett (2001) 86(16):3682–5. doi:10.1103/physrevlett.86.3682
23. Cohen R, Erez K, Ben-Avraham D, Havlin S. Resilience of the internet to random breakdowns. Phys Rev Lett (2000) 85:4626–8. doi:10.1103/physrevlett.85.4626
24. Nagata S, Kikuchi M. Emergence of cooperative bistability and robustness of gene regulatory networks. PLoS Comput Biol (2020) 16(6):e1007969. doi:10.1371/journal.pcbi.1007969
25. Faci-Lázaro S, Lor T, Ródenas G, Mazo JJ, Soriano J, Gómez-Gardeñes J. Dynamical robustness of collective neuronal activity upon targeted damage in interdependent networks. Eur Phys J Spec Top (2022) 231(3):195–201. doi:10.1140/epjs/s11734-021-00411-7
26. Franci A, O’Leary T, Golowasch J. Positive dynamical networks in neuronal regulation: How tunable variability coexists with robustness. IEEE Control Syst Lett (2020) 4(4):946–51. doi:10.1109/lcsys.2020.2997214
27. Tanaka G, Morino K, Aihara K. Dynamical robustness in complex networks: The crucial role of low-degree nodes. Scientific Rep (2012) 2(1):232–6. doi:10.1038/srep00232
28. Buscarino A, Gambuzza LV, Porfiri M, Fortuna L, Frasca M. Robustness to noise in synchronization of complex networks. Scientific Rep (2013) 3(1):2026–6. doi:10.1038/srep02026
29. Porfiri M, Frasca M. Robustness of synchronization to additive noise: How vulnerability depends on dynamics. IEEE Trans Control Netw Syst (2019) 6(1):375–87. doi:10.1109/tcns.2018.2825024
30. Chen F, Xiang L, Lan W, Chen G. Coordinated tracking in mean square for a multi-agent system with noisy channels and switching directed network topologies. IEEE Trans Circuits Systems-II: Express Briefs (2012) 59(11):835–9. doi:10.1109/tcsii.2012.2218395
31. Hu J, Wu Y, Li T, Ghosh BK. Consensus control of general linear multiagent systems with antagonistic interactions and communication noises. IEEE Trans Automatic Control (2019) 64(5):2122–7. doi:10.1109/tac.2018.2872197
32. Meng JH, Riecke H. Synchronization by uncorrelated noise: Interacting rhythms in interconnected oscillator networks. Scientific Rep (2018) 8:6949. doi:10.1038/s41598-018-24670-y
33. Zhang C, Yang Y. Synchronization of stochastic multi-weighted complex networks with lévy noise based on graph theory. Physica A (2020) 545:123496. doi:10.1016/j.physa.2019.123496
34. Sun Y, Zhao D. Effects of noise on the outer synchronization of two unidirectionally coupled complex dynamical networks. Chaos (2012) 22(2):023131. doi:10.1063/1.4721997
35. Cardelli L, Csikász-Nagy A, Dalchau N, Tribastone M, Tschaikowski M. Noise reduction in complex biological switches. Scientific Rep (2016) 6(1):20214–2. doi:10.1038/srep20214
36. Sun S, Chen F, Ren W. Distributed average tracking in weight-unbalanced directed networks. IEEE Trans Automatic Control (2020) 66(9):4436–43. doi:10.1109/tac.2020.3046029
37. Chen G. Searching for best network topologies with optimal synchronizability: A brief review. IEEE/CAA J Automatica Sinica (2022) 9(4):573–7. doi:10.1109/jas.2022.105443
38. Young GF, Scardovi L, Leonard NE. Robustness of noisy consensus dynamics with directed communication. In: Proceedings of the American Control conference (2010). p. 6312–7.
39. Rössler OE. An equation for continuous chaos. Phys Lett A (1976) 57:397–8. doi:10.1016/0375-9601(76)90101-8
40. Chen G, Ueta T. Yet another chaotic attractor. J Bifurcation Chaos (1999) 9(7):1465–6. doi:10.1142/s0218127499001024
41. Wang X, Chen G. A chaotic system with only one stable equilibrium. Commun Nonlinear Sci Numer Simulation (2011) 17:1264–72. doi:10.1016/j.cnsns.2011.07.017
42. Song Q, Cao J. On pinning synchronization of directed and undirected complex dynamical networks. IEEE Trans Circuits Syst Regular Pap (2010) 57:672–80. doi:10.1109/tcsi.2009.2024971
43. Shi D, Chen G. Simplicial networks: A powerful tool for characterizing higher-order interactions. Natl Sci Rev (2022) 9(5):nwac038–2. doi:10.1093/nsr/nwac038
44. Chen F, Chen X, Xiang L, Ren W. Distributed economic dispatch via a predictive scheme: Heterogeneous delays and privacy preservation. Automatica (2021) 123:109356. doi:10.1016/j.automatica.2020.109356
Keywords: complex network, directed network, dynamical robustness, noise, synchronization
Citation: Sun J, Xiang L and Chen G (2023) A new effective metric for dynamical robustness of directed networks. Front. Phys. 11:1129844. doi: 10.3389/fphy.2023.1129844
Received: 22 December 2022; Accepted: 11 January 2023;
Published: 23 January 2023.
Edited by:
Fei Yu, Changsha University of Science and Technology, ChinaReviewed by:
Zhengquan Yang, Civil Aviation University of China, ChinaCopyright © 2023 Sun, Xiang and Chen. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Linying Xiang, eGlhbmdsaW55aW5nQG5ldXEuZWR1LmNu
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.