 Ira S. Moskowitz
Ira S. Moskowitz- Naval Research Laboratory, Information Management and Decision Architectures Branch, Washington, DC, United States
We use a Riemannian metric as a cost metric when it comes to the optimal decisions that should be made in a multi-agent/Team scenario. The two parameters of interest to us are Team skill and Team interdependence, which are modeled as Wiener process drift and the inverse of Wiener process diffusion, respectively. The underlying mathematics is presented, along with some approximating rules of thumb. It is noteworthy that the mathematics points to, what seems at first, counter-intuitive paradigms for Team performance. However, in reality the mathematics shows a subtle interplay between the factors affecting Team performance.
1 Introduction
We are concerned here with how a multi-agent System (MAS) [2], or Team, reaches the successful conclusion of a task. In Team science, an important parameter for success is interdependence [1, 9, 10, 12]. The Team may be human, machine, or a hybrid. However, our mathematical assumptions implicitly assume that the Team is very machine-like in its behavior and discounts the vagaries of human psychology, e.g., [5]. We address this further at the conclusion of this article.
In [13] it was shown how to model Team behavior as (1-dimensional) Brownian motion [4] (starting at a point Z on the line). In particular, we proposed using Brownian motion
The drift, as mentioned, models Team skill. By way of motivation (using humans), imagine we have a restaurant kitchen crew (building on the restaurant Team given in [11]). We would like all the Team members to have the most skill possible; this would go into the calculation of the drift μ. High skill mapping to high μ. We would also like the Team to work together, hence we desire a high interdependence. Interdependence is the inverse of the diffusion, thus a Team with high interdependence has low diffusion σ, and a Team with each Team member acting independently of the other has high diffusion σ. This leads to the question of which is better—high drift μ, or low diffusion σ? Again, let us go back to our kitchen crew example. If everyone in the kitchen is skilled, but working independently of the others, the result will be a disaster. The dessert will be served before the main course, wine will be served after dessert, etc. Thus, skill alone does not lead to optimal success. On the other hand, consider a kitchen crew with no skill, but working together hand in glove. The results here are also less than optimal—very bad food served in an efficient manner. What is needed is a combination of both factors for optimal Team success, and that is what our idealized mathematics show.
Definition 1. We say that a stochastic process
•
• With probability 1, the function
• The stochastic process
• The increment,
Definition 2. From [13, 15, 17, 18], we say that
Let
and
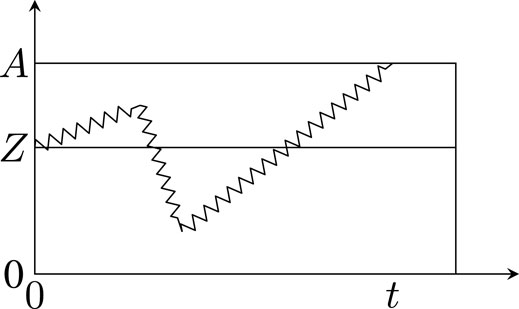
FIGURE 1. Brownian motion,
For now, we will concentrate on Equation 3. Keep in mind that as σ → 0, then
For Z = 0, we have that
Now say that we need to make an assessment—is it better to modify the drift μ or modify the diffusion σ to increase
2 First Steps
We start by defining our manifold B and its Riemannian structure.1
2.1 Our Manifold B
We would like to know the costs of changing
With this in mind, we define a 2-dimensional Riemannian manifold B, homeomorphic to
This metric captures the fact that for σ fixed, the difference in μ is simply the standard L1 distance between them, and that it is independent of the diffusion value. However, the diffusion is also independent of the drift value, but as we attempt to make the diffusion (standard deviation) smaller, it costs more and more, until we approach ∞ at the Dirac distribution.
Note 1—We have chosen to give an infinitesimal distance between points (μ, σ) and (μ + dμ, σ + dσ) and then extend it to a global distance. The Riemannian metric ds2 captures the fact that changes in μ are Euclidean straight-line distance, whereas changes in σ are based on the inverse of the variance. This concept aligns with how normal distributions differ. We further note that this result is also similar to the Fisher information of the normal distribution (a normalized Poincaré upper-half-plane). What is important about our Riemannian metric is that only the dσ2 is modified from the standard Euclidean metric. Again, this emphasizes the fact that changing the mean of the normal distribution is strictly Euclidean, whereas if we attempt to lower the variance, it requires much more “power,” and in the limit approaches infinite power. This approach agrees with our thinking that total interdependence (exactly the opposite of independent behavior) has a diffusion of 0, where as totally uncorrelated behavior has infinite diffusion [13, 6.4.2].—
Thus, B has the first fundamental form
Assume we are at p ∈ B, where p = (pμ, pσ), and with tangent vectors
The inner product between them is
The norm of a vector
Say c(t) is a smooth curve in B, c: (a, b) → B, then there is the velocity vector field (on the curve) denoted as
That is, c(t) = (cμ(t), cσ(t)), and
We define the length of c(t), denoted as L(c), as
Given two points, p, q ∈ B, and c(t), any smooth curve between them (this can be relaxed to include piece-wise smooth, but not of class C∞), we define the distance between them as
2.2 Team Geometry
Our metric is modeled on the hyperbolic metric in the Poincaré half-plane model. An important difference is that E does not depend on the σ value. The change in drift is independent of the diffusion value which we feel is the correct way to model Team action. Furthermore, the μ distance is linear with respect to μ. This choice assumes that only the change of Team skill matters, not the values it ranges between. However, the change in diffusion, which is independent of drift, does depend on the different diffusion (interdependence values) that the Team is choosing between. This approach makes sense in terms of a normal distribution. Going from a normal distribution N (μ, 10) to N (μ, 9) requires much less change in the distribution itself than going from N (μ, 1) to N (μ, 0.9), and again going from N (μ, 0.5) to N (μ, 0.45).
We see in Figure 2 that as σ → 0+, the difference in the normal plots is more severe. This behavior is in contrast to changing μ, which has the effect of shifting the graph to the left or right, but not changing its shape. We use a Riemannian manifold because it gives us the means to modify the metric for other models of Team behavior. This approach is accomplished by adjusting the gij in Equation 5.
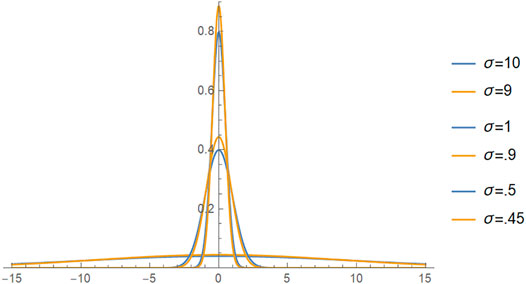
FIGURE 2. N (0, σ2) for three groups. g The bottom pair is σ = 10, 9; the middle pair is σ = 1, 0.9; and the top two, which are the most different are σ = 0.5, 0.45.
2.3 Curvature and Geodesics
We start by considering the Gaussian (sectional) curvature K of B as a function of the first fundamental form.
First, using Equation 5, we consider the easily obtainable matrices (the sub-index indicates the partial differentiation with respect to that index) for B.
From [14, Eq. (9.22), Eq. (9.33)] we use the Brioschi formula for a Riemannian 2-manifold in general with generic parameters μ, v, which, for arbitrary E and G, and when F = 0 [14, Eq. 9.25], becomes
For B, Gμ = 0 and Eσ = 0, we find that K = 0.
Now we move on to the geodesics of B. First we have to find the Christoffel (tensor) symbols (symmetric in the lower indicies). We define these on a local patch of a Riemannian 2-manifold, M, in general with generic parameters μ, σ.
Thus, for our manifold B, we have that all of the Christoffel symbols are 0, except for
Definition 3. For t ∈ (0, 1), a smooth curve c(t) = (c1(t), c2(t)),
In general, one does not need to restrict t to the unit interval, but we have done this as a convenience. In general, geodesics are unique up to an affine parametrization; without loss of generality, we have fixed this by setting the t interval to [0, 1]. Note that by the existence and uniqueness theorem for ordinary differential equations (ODEs), we can find a unique geodesic if we also include the vector values at c (0) and c′(0). (It turns out for B that this follows directly.)
We do not want to get into too many of the details of the ∇ operator above. It is covariant differentiation, which is the directional derivative of the vector field
which, using the above values of the Christoffel symbols, simplifies to
Trivially, we find that
To obtain cσ(t), we need to solve a non-linear second order ODE, so we simplify notation and use the auxiliary variable
which when we check does solve Eq. 21 for cσ(t) in its most general form. Thus,
Theorem 1. The constants a, b, α, β uniquely fix the geodesic.
Proof. Say there are two geodesics
Assume they are the same geodesic; then by evaluating the geodesic at t = 0, we have that
Now using the above and evaluating the geodesics at t = 1, we have that
□
So all we have to do now is to determine the four constants in the geodesic curve to uniquely specify it. As noted above, if we specify c(0) = (μ0, σ0) and
However, we are interested in the boundary value problem to see if knowing c(0), c′(0) also gives us a unique solution. In general, for geodesics on an arbitrary Riemannian manifold, this result need not be true. By way of example, consider the geodesics (where the locus is a great circle) on S2. Given c(0), c(1), there are infinitely many geodesics that satisfy the conditions (they just keep wrapping around). What is different in our situation, however, is that the geodesics never go back on themselves (this is seen by looking at the form of c(t)). If we have that c(0) = (μ0, σ0) and c(1) = (μ1, σ1), then simple calculations show that these boundary conditions uniquely fix the geodesic as
Thus, for the geodesics c: [0, 1] → B, we find that a solution exists and, given c(0) and c(1), that the geodesic is uniquely expressed as in Equation 24.
Equations 6 and 7 tell us how to obtain a topology based on the metric distance. This topology makes B homeomorphic to the upper half-plane with its standard topology. (Note though that B is not isometric to the upper half-plane with the standard Euclidean metric.) Since the latter space is complete, so is B. By the Hopf-Rinow theorem [20], given an initial point p = (x0, y0), and a final point q = (x1, y1), there exists a geodesic c(t) between them such that c (0) = p, c (1) = q and L(c) = d (p, q). Given Equation 24, we have shown how to uniquely construct such a geodesic; therefore, the geodesic from Equation 24 has the property that its length is the distance between the points.
The message from this result is that, given two points p, q on B, if we find the geodesic between them (remember we only use as a domain [0, 1]), then the length of that geodesic is the distance between them. This result is similar to what occurs in the Poincaré upper half-plane. We also note that this result would not work on S2 because the boundary values do not uniquely determine the geodesic—as discussed above, the geodesics on S2 can wrap around themselves, which does not happen on B or the Poincaré upper half-plane. Therefore, this leaves us with the following corollary to the above theorem.
Corollary 1.1. Given two points in p = (μ0, v0) ∈ B, and q = (μ1, σ1) ∈ B, there is a unique geodesic c: [0, 1] → B between them such that c(0) = p, c(1) = q. Furthermore, c(t) is length minimizing, that is, L(c) = d (p, q). The geodesic is as given in Equation 24.
Now let us examine the length of our geodesic c(t) between p = (μ0, σ0) and q = (μ1, σ1). By Equation 6, we have that.
Corollary 1.2. Given two points in p = (μ0, σ0) ∈ B, q = (μ1, σ1) ∈ B, the length of the unique geodesic c(t) between them is
Let us see what some of these geodesics look like (their traces).
Example 1: Let us examine the case where σ is held constant between two points. Let p = (μ1, σ), q = (μ2, σ). The geodesic between them is
We illustrate this result with p = (9, 2), q = (3, 2) in Figure 3. When v is fixed, we are in a standard Euclidean metric, the length of the geodesic is its distance, and it follows from Eqs 6, 7 that d (p, q) = |μ1 − μ0|,
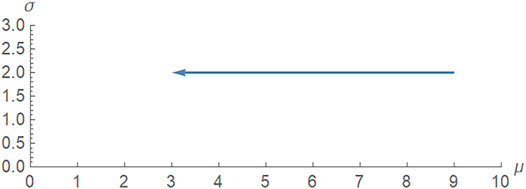
FIGURE 3. Geodesic starting at p = (9, 2) and ending at q = (3, 2).
The result is a horizontal straight line of length six. When v is fixed, our geometry is standard Euclidean geometry. Example 2: Let us now look at the opposite situation, when we hold μ fixed and vary σ.
The trace of this geodesic, shown in Figure 4, is simply a vertical line, however, its length is not its Euclidean length of 2—0.5 = 1.5, rather its length is
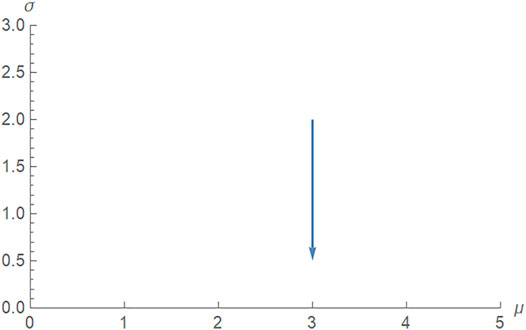
FIGURE 4. Geodesic starting at p = (3, 2) and ending at q = (3, 0.5).
Let us look at the general geodesics a bit more. In Figure 5, we see paths of the geodesics that start at (μ0, σ0) and end at (μ1, σ1). These representative samples, along with Figures 3, 4, show the general shape of the geodesics.
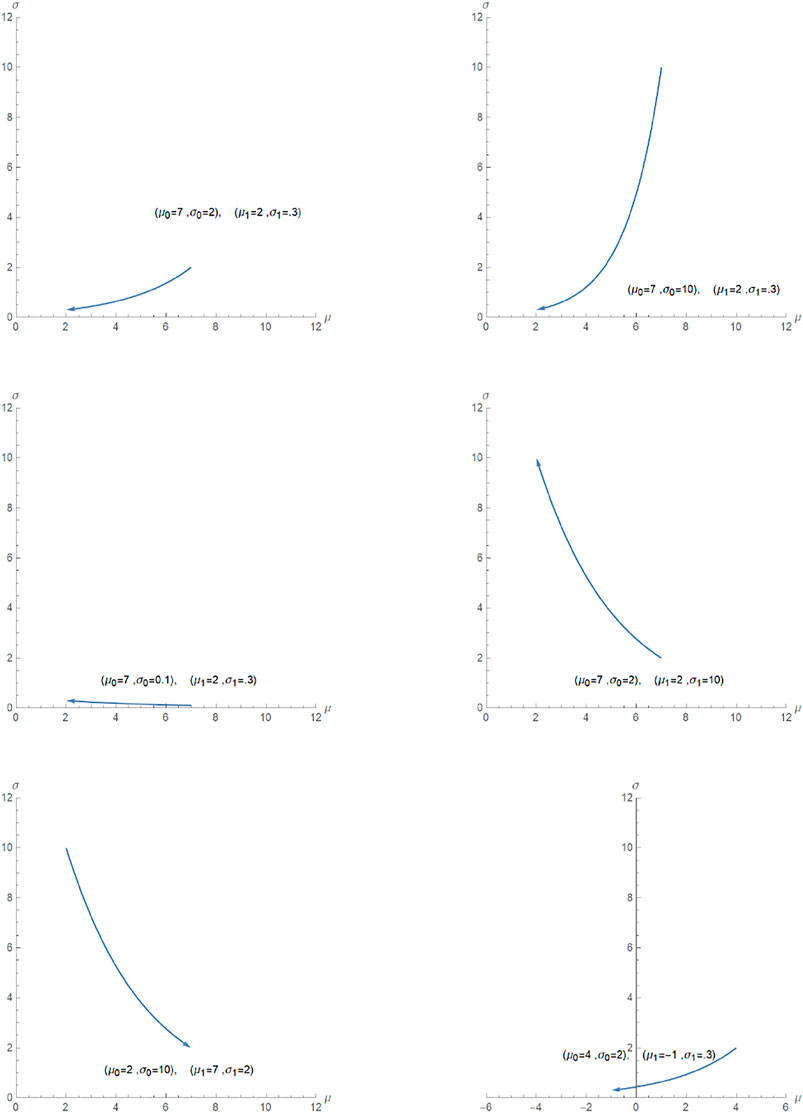
FIGURE 5. Various geodesics.
An interesting question becomes: Given a point (μ0, σ0), what is the locus of points (μ, σ) distance D from this point? From Equation 25, we easily have that
From this result, we see that μ ∈ [μ0 − D, μ0 + D] and σ ∈ [σ0e−D, σ0eD].
We plot in Figure 6 the locus of points for σ as a 2-valued “function” of μ, with distance 2 from the point (1.5, 3) and when Z=.6 (recall that we have normalized A to 1).
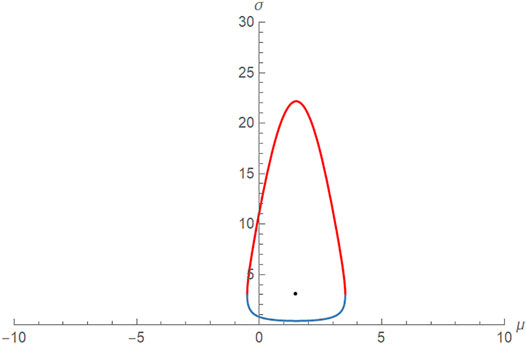
FIGURE 6. Geodesic locus: Points at a distance 2 from (1.5, 3) with A = 1, Z =0.6. This is our metric “circle.”
Let us go back to Eq. 3 and see how
We start by summarizing some of the results from [16, Sec 6.2.2] that discuss how
•
• For μ > 0,
• For μ < 0,
Since the center of our 2-ball is (1.5, 3), let us examine the two points with extreme μ values of -0.5 and 3.5. We find that
and
Keep in mind that for μ fixed at 3.5, as σ grows, the boundary probability approaches 0.6 = Z/A = 0.6/1. This results in the values at the four “corners” of the metric-circle. One might think that the south pole is the highest probability. Let us plot
Please note when comparing Figures 6, 7 that the blue and red regions have shifted.
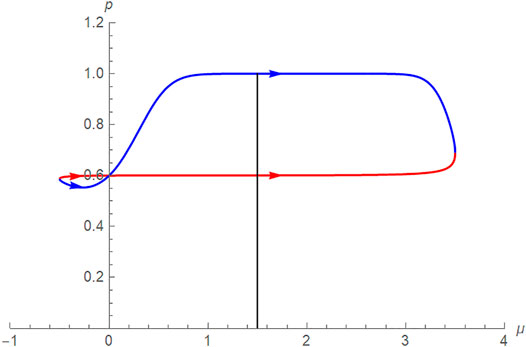
FIGURE 7.
From Figure 7, one might infer that the maximum probability occurs at the bottom corner (μ, σ) = (1.5, 0.406). Further numerical analysis shows that this is not true; the actual maximum occurs closer to when μ = 2 (with the corresponding σ > 0.406). Let us use a different example to show this result better, as in Figure 8. Here, it is much more obvious that the maximum probability does not occur at the south pole of the metric circle.
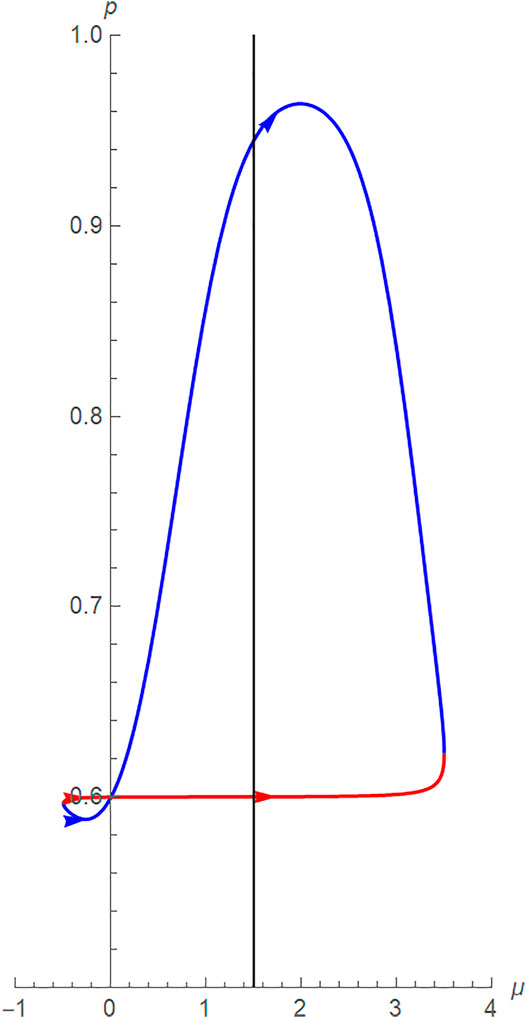
FIGURE 8.
We also see that the minimum probability does not occur for the smallest μ; rather, it too is a combination of a small μ, but with a larger σ.
In Figure 9, we have combined the plots from Figures 6, 7. That is, Figure 6, which is a plot of a 2-valued function of σ against μ, is sketched in (μ, σ, 0) space. In Figure 7, since σ is now a 2-valued function of μ, we see that the probability
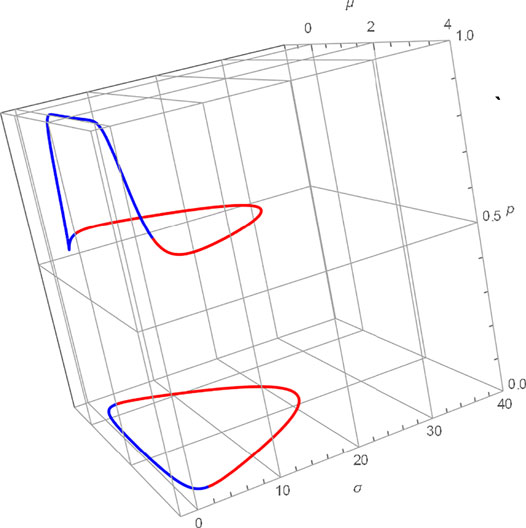
FIGURE 9. Combo.
3 Surface Geometry
Let us move away from points a certain Riemannian distance from a point and consider the surface and the level sets of
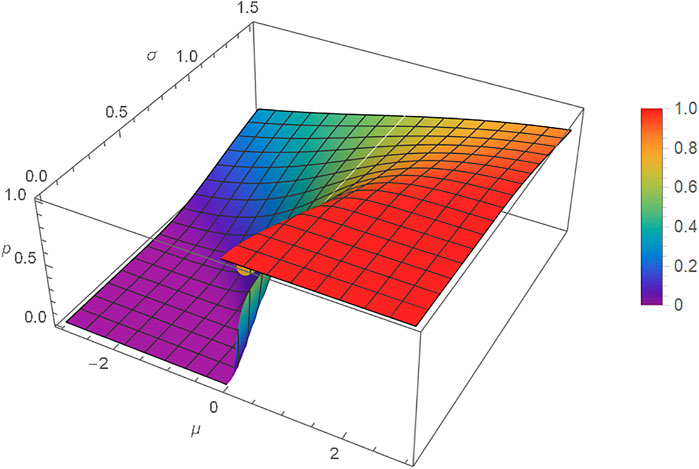
FIGURE 10. Plot of
Let us consider the level sets of
Theorem 2. The level sets of
Proof. (⇐) If μ/σ2 = μ′/σ′2 = k, then it is obvious that
Let us look at the level sets of this surface in Figure 11. We see 100 level sets going from left to right in ascending order from 0.01 to 0.99 in approximate steps of 0.01. The middle level set is white and that corresponds to
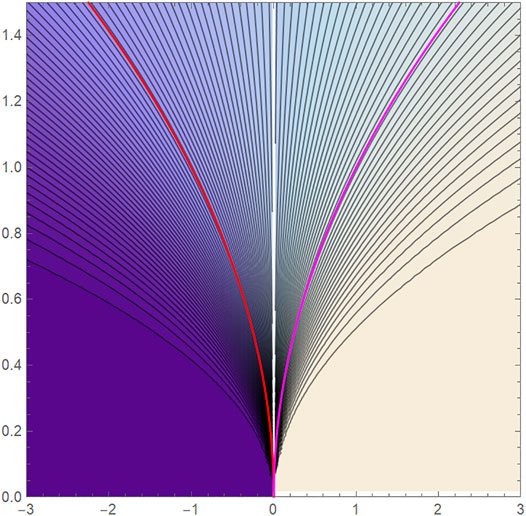
FIGURE 11. Level sets of
Keep in mind that every level set of
4 Impact on Teams and Multi-Agent Systems
We have learned from the mathematics that the decision to attempt to increase skill or to increase interdependence is not trivial. The best answer is a complicated mathematical expression. We also could have looked at the time to obtain the correct answer, but this is even more complicated and will also be addressed in future work.
Presently, our problem boils down to the probability of reaching the correct answer by using the Riemannian distance described in this article—which gets a Team to the highest new probability of success by staying within the distance constraints on skill and interdependence.
Of course, general rules of thumb can be derived by studying the geometry of the question in hand, and near-optimal solutions may be good enough to satisfy a user.
Recall from [16], for μ > 0 (the situations we have been looking into), the lower the diffusion, the greater the interdependence. We note that our mathematics shows that to optimize Team performance, it takes a combination of increasing the drift/skill μ > 0 and lowering the diffusion σ (increasing interdependence) to optimize the probability of the Team of multi-agents of reaching the correct conclusion to a problem that it confronts.
5 Concluding Remarks
Presently, to avoid complicated Riemannian geometric discussions, it is best to use rules of thumb that can be derived from the various plots of the Teams in question. This present work continues the theme emphasized by Lawless [9, 10] of the importance of interdependence, but also has thrown the skill issue into the mathematical mix. This point is not to say that others have ignored skill, rather that their focus was in the interesting and not completely understood topic of interdependence. It was our desire in this article to present a framework incorporating more of the mathematics for decision making.
Future work needs to be done on this topic. We have presented an idealized mathematical model. If the Teams are not simply multi-agents systems, but rather human, or human-machine hybrid teams, our model must be tempered by human factors. Humans do not act as automatons. These ideas are discussed in detail in the beautiful books by Kahneman [6, 7], and also [21]. A good overview of Kahneman’s Nobel prize work in behavioral economics can be found in [5]. In fact, from [7] we can take the concept of noise and view that in terms of diffusion. As we rely more and more on hybrid teams, we must factor in a behavioral economics type approach to Team decision making. How this relates to the mathematics holds promise as a new research area. Furthermore, Teams are often subject to the wisdom of crowds [21], or the stupidity of crowds [19] (this work involves ants, which might be better representative agents than humans when attempting to model a machine), and the mathematical model we have presented does not incorporate such human factors. Of course, future work could include looking at and measuring these factors for an actual Team/MAS.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Author Contributions
The author confirms being the sole contributor of this work and has approved it for publication.
Conflict of Interest
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
We thank Bill Lawless, Ruth Heilizer and the reviewers for their efforts. We are grateful to a reviewer and Ciara Sibley for pointing out, and discussing, the relevant research of Daniel Kahneman.
Footnotes
1In this article, we had to make a choice between readability for the non-expert in differential geometry and exact precision with respect to Riemannian geometry. We hope that we have achieved a happy middle ground, and we assure the interested reader that any of the missing fine points can be found in the literature (e.g. [20]).
References
1.National Research Council. Enhancing the Effectiveness of Team Science. In: Cooke NJ, and Hilton ML, editors. Committee on the Science of Team Science; Board on Behavioral, Cognitive, and Sensory Sciences; Division of Behavioral and Social Sciences and Education; National Research Council. Washington, DC: The National Academies Press (2015).
2.Springer. Autonomous Agents and Multi-Agent Systems. Berlin, Germany: Springer Journal (1998-2021).
3. Feller W. An Introduction to Probability Theory and its Applications, Vols.1&2. Hoboken, NJ, USA: Wiley (1950/1968).
4. Einstein A. Über die von der molekularkinetischen Theorie der Wärme geforderte Bewegung von in ruhenden Flüssigkeiten suspendierten Teilchen. Ann Phys (1905) 322:549–60. doi:10.1002/andp.19053220806
5. Kahneman D. Maps of Bounded Rationality: Psychology for Behavioral Economics. Am Econ Rev (2003) 3(5):14491475. doi:10.1257/000282803322655392
7. Kahneman D, Olivier S, Cass S. Noise: A Flaw in Human Judgment. New York City: Little, Brown Spark (2021).
8. Lalley S, Mykland P. Lecture Note Statistics 313: Stochastic Processes II. New York City: Spring (2013). Available from: https://galton.uchicago.edu/lalley/Courses/313/. (Accessed October 13, 2021).
9. Lawless WF. The Entangled Nature of Interdependence. Bistability, Irreproducibility and Uncertainty. J Math Psychol (2017) 78:51–64. doi:10.1016/j.jmp.2016.11.001
10. Lawless WF. The Physics of Teams: Interdependence, Measurable Entropy and Computational Emotion. Front Phys (2017) 2017. doi:10.3389/fphy.2017.00030
11. Lawless WF. Quantum-Like Interdependence Theory Advances Autonomous Human-Machine Teams (A-HMTs). Entropy (2020) 22(11):1227. doi:10.3390/e22111227
12. Moskowitz IS, Lawless W, Hyden P, Mittu R, Russell S. A Network Science Approach to Entropy and Training. Palo Alto, California, U.S.: AAAI Spring Symposia Series, AAAI Press, 2015.
13. Moskowitz IS. Agent Team Action, Brownian Motion and Gambler’s Ruin. Eng Artificially Intell Syst (2021) 2021. doi:10.1007/978-3-030-89385-9_6
14. Moskowitz IS, Russell S, Lawless W. An Information Geometric Look at the Valuing of Information. In Chapter 9. Human-Machine Shared Contexts. Editors Lawless W. Amsterdam, Netherlands: Elsevier (2020). doi:10.1016/b978-0-12-820543-3.00009-2
15. Moskowitz IS, Brown NL, Goldstein Z. A Fractional Brownian Motion Approach to Psychological and Team Diffusion Problems. In: Lawless Wet al. editors. Ch. 11, Systems Engineering and Artificial Intelligence. Berlin, Germany: Springer (2021). doi:10.1007/978-3-030-77283-3_11
16. Moskowitz IS. Agent Team Action, Brownian Motion and Gambler’s Ruin. Chaper 11. In: Lawless Wet al. editors. Lecture Notes in Computer Science (LNCS). Berlin, Germany: Springer (2021).
18. Ratcliff R, Smith PL, Brown SD, McKoon G. Diffusion Decision Model: Current Issues and History. Trends Cogn Sci (2016) 20(4):260–81. doi:10.1016/j.tics.2016.01.007
19. Sasaki T, Granovskiy B, Mann RP, Sumpter DJ, Pratt SC, Pratta SC. Ant Colonies Outperform Individuals when a Sensory Discrimination Task Is Difficult but Not when it Is Easy. Proc Natl Acad Sci U S A (2013) 110:13769–73. doi:10.1073/pnas.1304917110
20. Spivak M. A Comprehensive Introduction to Differential Geometry. Volumes 1-5. 3rd ed. Los Angeles: Publish or Perish (1999).
Keywords: agents, team, Wiener process, Brownian motion, multi-agent system
Citation: Moskowitz IS (2022) A Cost Metric for Team Efficiency. Front. Phys. 10:861633. doi: 10.3389/fphy.2022.861633
Received: 24 January 2022; Accepted: 28 February 2022;
Published: 25 April 2022.
Edited by:
William Frere Lawless, Paine College, United StatesReviewed by:
Sergio Da Silva, Federal University of Santa Catarina, BrazilStephen Russell, Jackson Memorial Hospital, United States
Copyright © 2022 This work is authored by Moskowitz on behalf of the U.S. Government and as regards Dr. Moskowitz and the U.S. Government, is not subject to copyright protection in the United States. Foreign and other copyrights may apply. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ira S. Moskowitz, aXJhLm1vc2tvd2l0ekBucmwubmF2eS5taWw=