 Frederik Dahl Madsen
Frederik Dahl Madsen Ciarán D. Beggan
Ciarán D. Beggan Kathryn A. Whaler
Kathryn A. Whaler- 1School of GeoSciences, University of Edinburgh, Edinburgh, United Kingdom
- 2British Geological Survey, Edinburgh, United Kingdom
Extreme space weather events can have large impacts on ground-based infrastructure important to technology-based societies. Machine learning techniques based on interplanetary observations have proven successful as a tool for forecasting global geomagnetic indices, however, few studies have examined local ground magnetic field perturbations. Nowcast and forecast models which predict the magnitude of the horizontal geomagnetic field, |BH|, and its time derivative,
1 Introduction
One of the most significant ground effects of extreme space weather is the generation of large geoelectric fields which in turn create geomagnetically induced currents (GICs) [1–4]. GICs are electrical currents induced in the surface from rapidly changing geoelectric fields. They have potential to be damaging to infrastructure such as high pressure pipelines or rail networks, and in extreme cases destroy transformers in high voltage power grids [5,6]. The rate of change of the horizontal ground magnetic field,
An increasingly popular tool for forecasting the effects of space weather is machine or deep learning. Neural networks (NNs) have been used to forecast low temporal resolution geomagnetic indices such as Kp [10–13] and Dst [11,14] from historic indices and satellite measurements at the L1 Lagrange point, showing forecasting capabilities up to an hour ahead of time. Efforts have also been made to forecast at a higher cadence but this introduces complications related to the highly variable nature of the magnetic field; machine learning algorithms often struggle to predict very rapid changes (e.g., [15]).
In forecasting
Based on the success of the LSTM network in other fields and on the work of Wintoft et al. [1], this study focuses on forecasting BH and

TABLE 1. Observatory locations with geomagnetic coordinates in year 2020.0.
Ideally, we wish to be able to predict the ground variations of the magnetic field to a suitable accuracy in order to compute the ground electric field and subsequently GIC flow in grounded infrastructure. This would provide timely forewarning and actionable information, for example to civil authorities and industrial operators in the event of a severe space weather event. This work is the first to attempt to produce a direct estimate of geomagnetic field variation at United Kingdom observatories using a RNN as opposed to other regression methods (e.g., [16]).
In Section 2, we describe the data selection and preprocessing as well as the construction of the machine learning models. In Section 3 we show the result of forecasting the 7–9th September 2017 storm using simple correlation analysis. We discuss the overall performance of the models in Section 4, where we also suggest further improvements to the forecasting methods.
2 Data and methods
2.1 Ground Magnetic and solar wind data
We use the interplanetary magnetic field (IMF) and solar wind plasma data as measured at the L1 Lagrange point to predict |BH| and
To train and test the NNs, minute-mean cadence magnetometer measurements were gathered through the ESA Swarm data access service VirES2 using the Python package Viresclient3, with the core magnetic field removed using CHAOS-7 [18] leaving the residual field which is a combination of the crustal and external fields. We then compute and subtract the long term average of the residuals at each observatory to remove the constant crustal field bias in each component. From the northward, BN, and eastward, BE, magnetic field components, we calculate the magnitude of the horizontal field component, |BH| and its time derivative from:
Here, we discretise the time derivative by computing the backwards difference between two timesteps of Δt = 1 min.
2.2 Machine learning models
Deep learning models created in this study were constructed using the TensorFlow Keras environment [19]. Each model takes the four IMF and solar wind plasma parameters as well as |BH| or
2.2.1 Long short-term memory network
The LSTM network is a type of RNN whose performance is particularly well suited for time series forecasting [21]. Unlike most RNNs, which are connected between consecutive timesteps, the LSTM network has an additional cell state which acts as a long-term memory and is thus able to store information in each memory cell from multiple timesteps [12,15]. The LSTM network takes a 3-dimensional input vector with variables (samples, timesteps, parameters). In this study, we have chosen a time window length of T = 30 min. The general LSTM model setup has either one or two hidden LSTM layers feeding to an output dense (fully connected) node. Each LSTM model is cross-validated for the number of LSTM layers (1 or 2), LSTM cells in each layer (4, 16 or 32) and the activation function in the LSTM layers (sigmoid or tanh). This gives 60 possible LSTM model configurations for forecasting each parameter (|BH| or
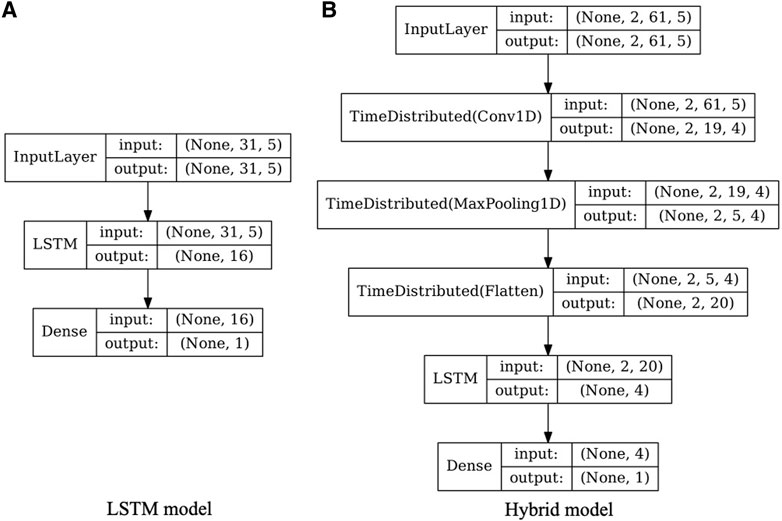
FIGURE 1. Keras model architecture for 30-min forecast of
2.2.2 Hybrid CNN-LSTM networks
Unlike the LSTM network, which reads in the data in time-windows, CNNs have the ability to process an entire input matrix at once, making them very flexible. The key features of a CNN are the convolution kernels, which move across an input matrix and detect features in the data, and the pooling layer, which condenses the information from the convolution kernels. In 2-dimensional CNNs, the convolution and pooling kernels move along the input data in two dimensions, which has proven particularly successful for identifying features in image classification (e.g., [22]). For multivariate time series forecasting, where we are only interested in detecting temporal features, a useful CNN architecture is the 1-dimensional CNN (1D CNN). Here, the convolution kernels only move along one direction. For further details about CNNs in timeseries forecasting we refer to Siciliano et al. [15] for general CNN structures in space weather forecasting and Granat [23] for particular detail of 1D CNNs.
We developed a bespoke hybrid CNN-LSTM model that consists of a series of CNNs feeding into an LSTM layer before predicting an output. The general setup of the hybrid model is as follows: a CNN, consisting of a 1D-convolutional hidden layer, a 1D-MaxPooling layer and a Flatten layer, is wrapped in a TimeDistributed layer. This then feeds into an LSTM layer, where all LSTM cells are fully connected to an output node, which gives the prediction. For the hybrid model, the hyperparameter cross-validation was between the number of CNN filters (4, 8 or 12), the kernel size (5 or 7), the LSTM activation function (sigmoid or tanh) and the number of LSTM cells in the LSTM layer (1 or 4). The CNN kernel stride length is set to be half of the kernel size. The hybrid model takes a 4-dimensional input vector of variables (samples, subsequences, timesteps, parameters). The subsequences define how many windows are being loaded into the TimeDistributed CNN layer, and in turn, how many data are parsed to the LSTM layer, and the timesteps are the number of data within each subsequence. For each output, 2 h (T = 120) of input data are used. From testing different subsequence-timestep splits, the optimal split was found to be two subsequences of 60 timesteps, i.e., the CNN layers read in 60 timesteps and 2 CNN windows are then fed into the LSTM layer for each output. As with the LSTM model, the best hyperparameter configuration for each model was found using the 5-fold grid search cross validation. The model configuration for the hybrid model forecasting
2.3 Data selection
As with most damaging geohazards (e.g., earthquakes, landslides, volcanoes), very large events in our case geomagnetic storms - are relatively rare occurrences [24]. This presents the main problem for training a machine learning model: the lack of data makes it difficult to develop reliable empirical relationships for forecasting extreme events, since they are likely to overfit on quiet periods when built on the entire dataset (e.g., [3,12,22]). In order to avoid over-training the models on geomagnetically quiet periods, we select storm events based on a certain exceedance threshold at each observatory within ±8 h of the threshold breach. For every timestamp
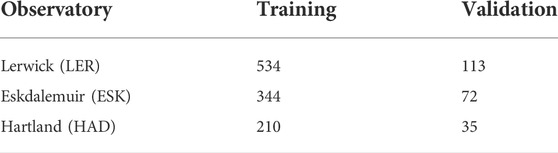
TABLE 2. Number of event days included in the training and validation sets for each observatory.
2.4 Data preprocessing
Wintoft et al. [1] showed that it is difficult to predict any variations in |BH| or
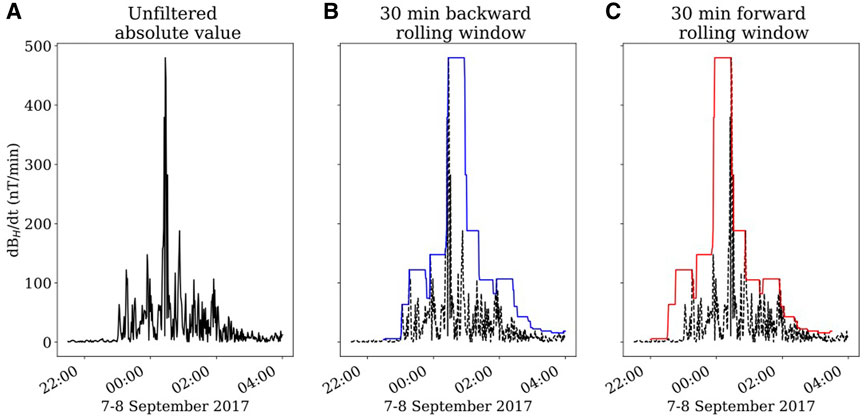
FIGURE 2. Example of rolling maximum window for
After picking events and applying the rolling maximum filter to the data, the full time series for each input parameter is normalised to its feature range such that the values lie between 0 and 1 in order to optimise learning. This normalisation for each datum x in the time series for each parameter is given by:
The full dataset is then split into training and validation parts and fed into the models. Each model uses the adaptive moment estimation (Adam) for optimisation and mean squared error (MSE) as a cost function:
Here, N is the number of samples in the event, y is the observed value and
3 Results
We developed 24 models, one for each of the three observatories, trained to forecast either |BH| or
Figure 3 shows the DSCOVR and ground observatory data as well as the 30 min forecasts for the 7–9th September 2017 storm, with the ground response to the first magnetospheric disturbance shown in the insets to the ground observatory data panels. At all three observatories, a peak in |BH| and
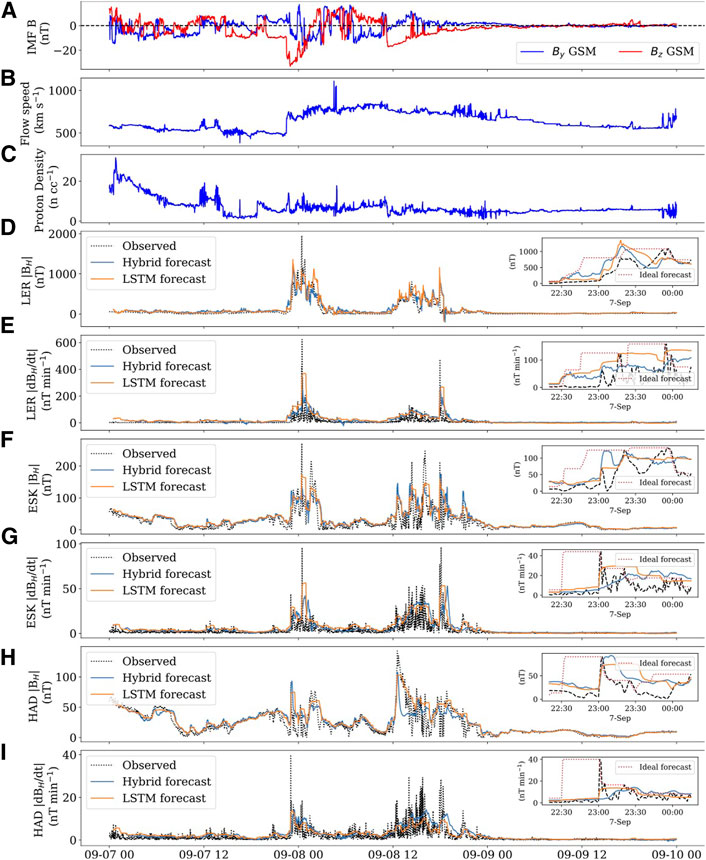
FIGURE 3. DSCOVR measurements and ground observatory measurements, and predictions for the 7th-9th September 2017 storm. Solar wind (A) IMF BY and BZ components, (B) the solar wind speed velocity and (C) density. Measured (black) and 30-min forecast (blue for hybrid, orange for LSTM) horizontal magnetic field and its time derivative at (D,E) LER, (F,G) ESK and (H,I) HAD observatory. The inset figures show observed BH and
Considering this reduction in forecast power after the initial phase, we split the storm into two parts: the initial part of the storm where the ground magnetic field is directly driven by the solar winds, and the later phase which was indirectly driven by substorm and auroral electrojet enhancement. We consider the directly driven part of the storm to last for 45 min after the storm commencement. To evaluate ability to forecast only this part of the storm, we ignore data from 45 min after the storm commencement until |BH| and
Figure 4 shows the correlation between the forecasted and observed |BH|max 30 and
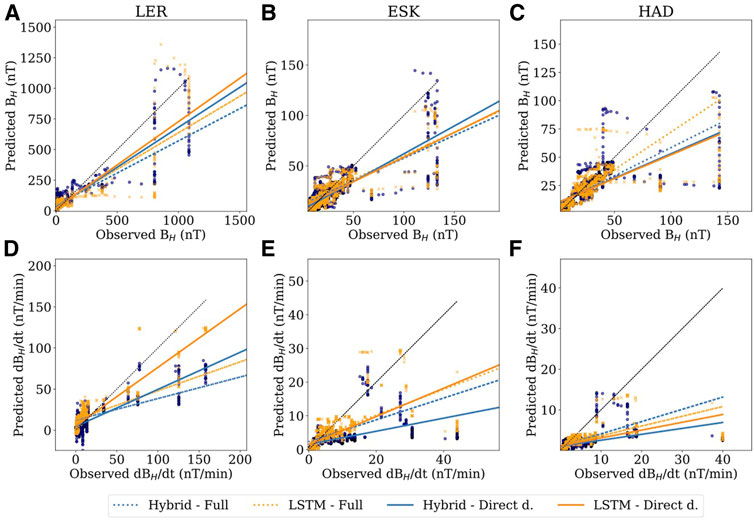
FIGURE 4. Correlation plots for forecasts of |B_H| (A–C) and |dB_H/dt| (D–F) with 30 min lead time at LER (A,D), ESK (B,E), and HAD (C,F). Orange represents LSTM and blue hybrid models; solid lines are for directly driven parts of the storm and dotted lines represent full storm. Gradient and intercept for best fit line are given in Table 3. Dotted black line shows the 1:1 line for reference.
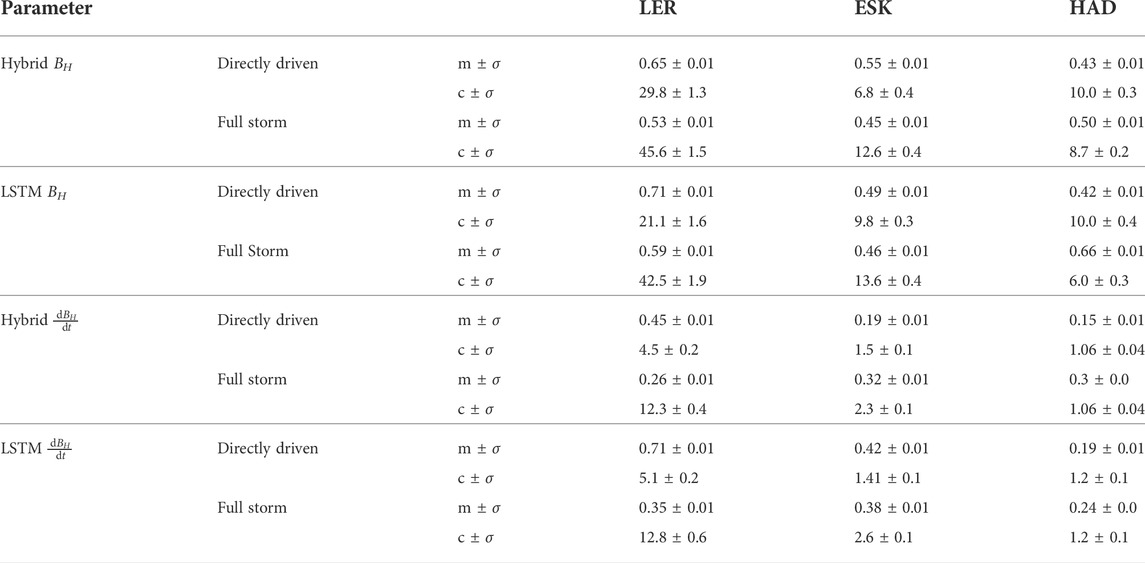
TABLE 3. Gradient, m, and intercept, c, for best fit lines of form y = mx + c for 30 min forecast shown in Figure 4. σ is the standard deviation of the best fit gradient and intercept parameters derived from the covariance matrix of the least squares fit.
When comparing the relative performance between the hybrid and LSTM models, we see that the LSTM forecast generally has a higher correlation. This may relate to the LSTM models’ ability to capture the “blockiness” of the rolling maximum filter, leading to less variability at the higher cadences. The models inability to capture this “blockiness” appears as vertical features in the scatter plots. This is particularly obvious in the |BH|max 30 forecast in Figure 4 for LER at observed values around 1,000 nT or ESK at observed values around 130 nT.
Comparing the best fit line for the full storm to the directly driven part, we see that there is only a small change for both |BH|max 30 forecasts at LER and hybrid
Figure 5 shows the correlation between the observed and predicted |BH|max i and
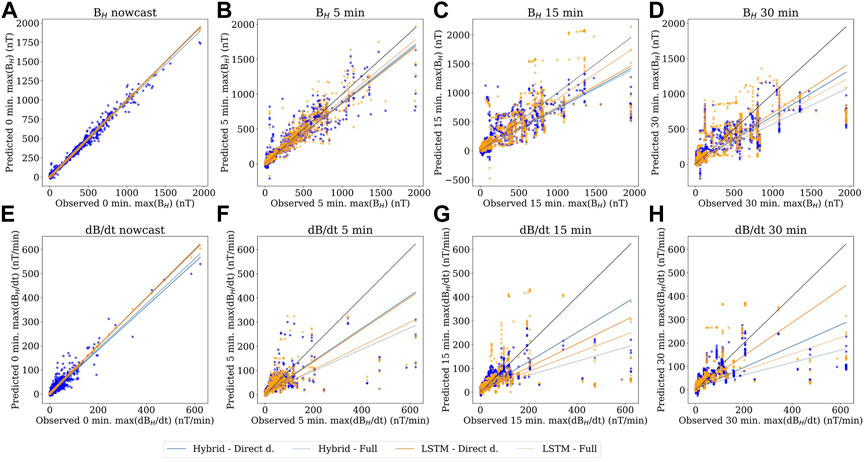
FIGURE 5. Correlation plots for now- and forecasts of |B_H| (A–D) and |dB_H/dt| (E–H) at 5, 15 and 30 min lead time at LER. Orange represents LSTM and blue hybrid models; solid lines are for directly driven parts of the storm and dotted lines represent full storm. Gradient and intercept for best fit line are given in Table 4. Dotted black line shows the 1:1 line for reference.
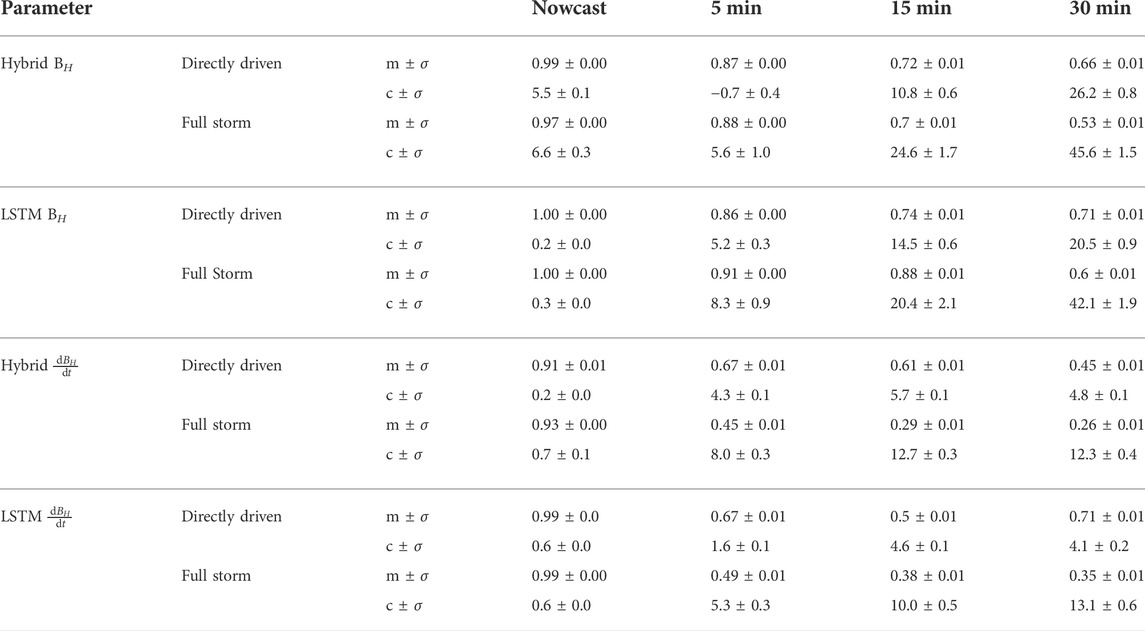
TABLE 4. Gradient, m, and intercepts, c, for best fit lines for now- and forecasts at LER as shown in Figure 5. σ is the standard deviation of the best fit gradient and intercept parameters derived from the covariance matrix of the least squares fit.
With increasing lead time, the correlation between observed and forecast values decreases. This is clearer in the
For completeness, the square-root of the MSE (RMSE) values for each model forecasting the test storm are shown graphically in Figure 6 for all three observatories and given in Supplementary Table S5. These show similar trends to that observed from the correlation analysis in Table 4, Supplementary Table S6, S7. A general increase in RMSE is observed with increasing lead time. In the nowcasts for all three observatories, the LSTM significantly outperforms the hybrid model, but for larger lead times, their RMSEs are comparable. The only exception to this is the models forecasting |BH| with a 30 min lead time at HAD, where the LSTM performs consistently better in forecasting the full storm. We also see a significant difference in RMSE between forecasting the full storm as opposed to forecasting the directly driven parts only, which is again consistenct with the observations from the correlation analysis.
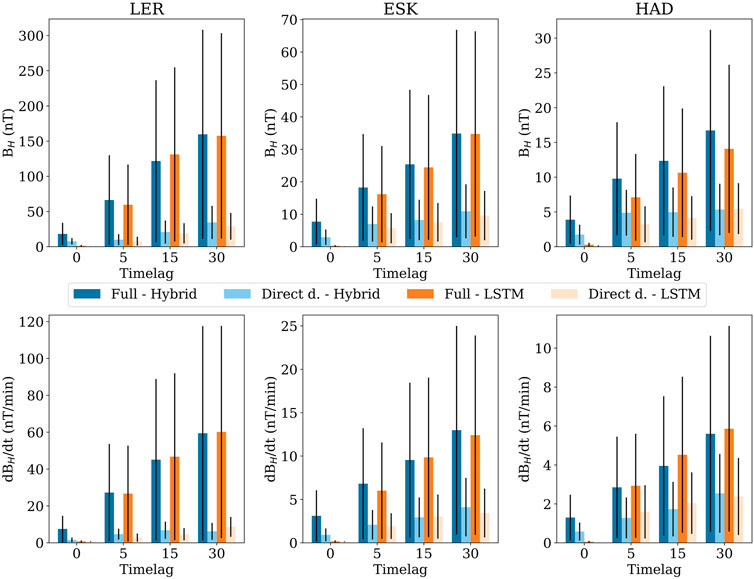
FIGURE 6. RMSE for each model forecasting the test storm at each Timelag in minutes LER, ESK and HAD. Blue colours represent the hybrid model, orange colours represent the LSTM model. Error bars signify one standard deviation in the RMSE. Note the difference in y-scale in each plot.
To investigate further the forecasting power of the models during the directly driven part of the storm compared to the full storm, we plot in Figure 7 the correlation coefficient, R, between the data and the forecast for various time shifts at LER. (Similar figures for the ESK and HAD forecasts are found in the Supplementary Material.) If the forecasts were perfect, there would be a sharp peak at 0 timeshift (i.e., no lag), and if the forecast consistently predicted 5 min behind the data, the peak would be at −5. The dashed lines show the correlation for the full test storm forecasts, and the peaks are observed at a lag equivalent to the negative of the forecast lead time. This suggests that the overall forecasting power is reduced when considering the full storm, and that the models could be considered inefficient nowcasts rather than forecasts.
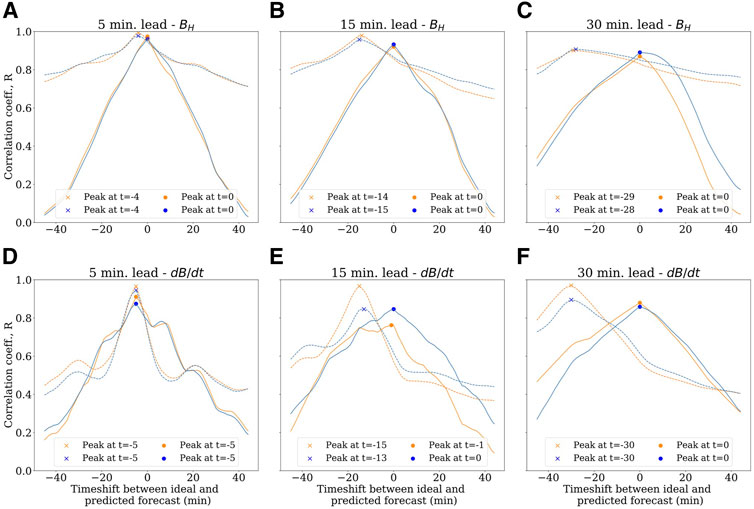
FIGURE 7. Temporal correlation between ideal and model-generated forecast of |B_H| (A–C) and |dB_H/dt| (D–F) at LER. × and • marks the peak correlation. As before, orange represents LSTM and blue hybrid models; solid lines are for directly driven parts of the storm and dotted lines represent full storm.
By considering only the directly driven parts of the storms, we see significant change in forecasting power for some of the models. The solid lines in Figure 7 show a shift in the peak for all three |BH| forecasts at LER, as well as in the
4 Discussion
We present a new study examining the use of convolutional and recurrent neural networks to predict ground level geomagnetic field variation at three mid-latitude observatories in the United Kingdom. Clearly the relationship is complex and non-linear in detail. This work provides evidence that some predictive power appears in the connection between the L1 solar wind and magnetic field variation on Earth.
4.1 Evaluating the models
The statistical results from evaluating the forecasts at LER for 5, 15 and 30 min lead times are promising. Though the models generally performed poorly when attempting to predict variation during the entire storm, a significant increase in model performance was observed in most cases for the directly driven parts of the storm. |BH| forecasts at all three lead times showed a clear peak at 0 min in the temporal correlation plots. This result is also observed for forecasting
Looking at the results from the other observatories (see Supplementary Figure S1–S4; Supplementary Table S6, S7), the ESK |BH| forecasts show poor temporal correlation when forecasting the full storm, but the correlation has a clear peak at zero for the 15 and 30 min forecasts for the directly driven parts of the storm, though with a decrease in magnitude. When considering only the directly driven parts of the storm at ESK, we see a significant decrease in linear fit for the LSTM model, but an increase for the hybrid model. From these observations, we conclude that the ESK |BH| forecasts are not as good as those for LER, but again the models do have some forecasting capability. The
Overall, this suggests that RNNs are useful tools in forecasting geomagnetic storm onsets at mid-to high latitudes. Keesee et al. [4] investigated this by forecasting BE and BN separately, in order to predict |BH| and
4.2 Applications with real time data
As mentioned in Section 2.1, the models were trained and validated using data from the OMNI scientific dataset, but were tested using real-time DSCOVR data. We note that there is a temporal difference between the OMNI data and the real-time data from the L1 Lagrange point, since the OMNI data have been time-shifted to Earth’s bow shock [28]. The OMNI dataset was chosen for its easy access and the relative lack of data gaps compared to the real-time stream. Most data gaps in the training and validation data were shorter than the forecasting lead times, and were thus negligible when the rolling max filter was applied.
We further note, similar to Smith et al. [29], that using the OMNI dataset to create models with the ability to capture impulsive phenomena, such as sudden commencements, is not ideal. By comparing model performance on the test storm using data from DSCOVR and OMNI, we found that the models tested on OMNI data were incapable of capturing such impulsive phenomena. However, we attribute our models’ ability to forecast using real-time data, regardless of being trained on OMNI data, to the stripping of temporal information in our preprocessing pipeline (particularly the rolling max-filter). We interpret the training process such that the models associate sharp peaks in the IMF input with sharp peaks in the ground magnetic measurements. Thus, using real-time L1 Lagrange point measurements allows the models to infer an increase in |BH| or
4.3 Forecasting extreme values
The nowcast models tend to under-predict extreme values. This relates to the process of normalisation of the input data for machine learning algorithms. As noted by Siciliano et al. [15], normalisation compresses the data into a smaller range such that, if the predicted extreme values were too low, the resulting value after converting to the full scale would be diminished. They proposed standardising the data to the mean before input, but this has its own issues, as it assumes the data to be approximately normally distributed. Thomson et al. [24] show that geomagnetic variations driven by space weather are better modelled as a generalised extreme value distribution. Hence, extreme values would be incorrectly represented if normalised to centre about a particular mean. Therefore, a better way to preprocess the data for machine learning training and prediction may be to normalise using a Pareto distribution, or other extreme value statistic, fitted to the data from each observatory to be modelled.
An alternative approach would be to evaluate the models’ ability to predict exceedance of extreme thresholds within a given time window, rather than their ability to predict observed values at minute resolution, thus changing the problem from a regression to a classification problem. Classification methods, such as the binary event analysis proposed by Pulkkinen et al. [31] and later refined by Welling et al. [32], allow for easier comparison of observatories at different latitudes, as the associated error will not be purely magnitude-dependent in contrast to the MSE. However, this method involves further complexity, as it requires defining representative thresholds for each observatory.
4.4 How much of the past is required to predict the future?
We have assumed that each forecast and nowcast model performed best with the same temporal input length. The 30 min input length for the LSTM models was chosen because it should encompass the IMF variations observed at DSCOVR before ground magnetic field effects are observed, and the 60 × 2 sequences for the hybrid models were chosen for the CNN layer to have more data to filter. When analysing optimal IMF and solar plasma input parameters for Kp prediction, Tan et al. [12] performed a correlation analysis for their input parameters at increasing timelags against Kp to determine at what timestep the information became obsolete; they found a 6 h input series with a cadence of 1 h to be optimal. A similar approach to determine the optimal input timesteps from correlating with |BH|max i or
4.5 Model performance related to observatory latitude
We found a significant difference in the number of events at each observatory, as shown in Table 2. Lerwick has almost twice as many hours of geomagnetic event data and the size of these events is significantly larger (see Figure 3). This is expected as observatories at higher latitudes experience larger effects from the influence of the auroral electrojet [33,34]. During the data processing this was not fully appreciated when picking events from the full datasets at each observatory as the
4.6 LSTM vs. hybrid networks
We have determined that there is a difference in performance between the LSTM and hybrid CNN-LSTM networks. Considering first the nowcasts, the LSTM model showed a best fit line with a gradient close to 1 for both |BH| and
For the forecasts, the hybrid models tend to perform worse than the LSTM in most cases, the exceptions being the
Therefore, although the hybrid models perform comparably at most observatories, and outperfom LSTM in the
5 Conclusion
Horizontal geomagnetic field data gathered from three United Kingdom observatories, Lerwick, Eskdalemuir and Hartland, were correlated with IMF and solar plasma data from the L1 Lagrange point. Two machine learning approaches were adopted for each observatory: a pure LSTM network and a hybrid CNN-LSTM model. Each architecture was used to develop the following models: one for nowcasting the horizontal geomagnetic field and its time derivative, and one for forecasting with a lead time of 5, 15 and 30 min. The optimal hyperparameters for each model were trained using large geomagnetic storms between 1997 and 2016, and the models were tested on the 7–9 September 2017 storm. Overall, the pure LSTM networks were found to outperform the hybrid models, with the exception being the 15 min
The forecast models were only able to predict the directly driven parts of geomagnetic storms in the first few hours before magnetic reconnection (substorms) become the dominant driver. The models were better at forecasting at higher geomagnetic latitudes, where the ground response to magnetospheric disturbances is more enhanced.
Further improvements include expanding the input parameters to include the magnetic local time and bin multiple observatories at similar latitudes together to expand the training datasets. Overall, we suggest that machine learning algorithms perform best when there are strong physical links between the driving parameters and the ground effects.
Data availability statement
Publicly available datasets were analyzed in this study. These data can be found here: https://cdaweb.gsfc.nasa.gov/registry/hdp/hapi https://vires.services/.
Author contributions
FDM collected data, wrote the code, and analysed the results. CDB and KAW designed the project and analysed results. All three contributed equally to the writing of the manuscript.
Funding
This work is funded under United Kingdom Natural Environment Research Council Grant NE/P017231/1 and NE/P017290/1 “Space Weather Impact on Ground-based Systems (SWIGS).” This work has also received funding from the European Union’s Horizon 2020 research and innovation program under grant agreement No 870405 (EUHFORIA 2.0). Open access funding was provided by the University of Edinburgh under agreement with UKRI.
Acknowledgments
We wish to acknowledge assistance from Ashley Smith for help with coding and advice on data access. FDM acknowledges funding from a University of Edinburgh College Vacation Scholarship. We acknowledge use of NASA/GSFC’s Space Physics Data Facility’s OMNIWeb (or CDAWeb or ftp) service, and OMNI data. The results presented in this paper rely on data collected at magnetic observatories. We thank the national institutes that support them and INTERMAGNET for promoting high standards of magnetic observatory practice (www.intermagnet.org).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fphy.2022.1017781/full#supplementary-material
Footnotes
1https://cdaweb.gsfc.nasa.gov/registry/hdp/hapi, last accessed 01-Jul-2022.
2https://vires.services/, last accessed 01-Jul-2022.
3doi.org/10.5281/zenodo.4694720
References
1. Wintoft P, Wik M, Viljanen A. Solar wind driven empirical forecast models of the time derivative of the ground magnetic field. J Space Weather Space Clim (2015) 5:A7. doi:10.1051/swsc/2015008
2. Viljanen A, Wintoft P, Wik M. Regional estimation of geomagnetically induced currents based on the local magnetic or electric field. J Space Weather Space Clim (2015) 5:A24. doi:10.1051/swsc/2015022
3. Bailey RL, Leonhardt R, Möstl C. Forecasting local GICs from solar wind data [Quick View session]. European: European Space Weather Symposium (2020).
4. Keesee AM, Pinto V, Coughlan M, Lennox C, Mahmud MS, Connor HK. Comparison of deep learning techniques to model connections between solar wind and ground magnetic perturbations. Front Astron Space Sci (2020) 7:72. doi:10.3389/fspas.2020.550874
6. Pulkkinen A, Bernabeu E, Thomson A, Viljanen A, Pirjola R, Boteler D, et al. Geomagnetically induced currents: Science, engineering, and applications readiness. Space Weather (2017) 15(7):828–56. doi:10.1002/2016sw001501
7. Campanyá J, Gallagher PT, Blake SP, Gibbs M, Jackson D, Beggan CD, et al. Modeling geoelectric fields in Ireland and the UK for space weather applications. Space Weather (2019) 17(2):216–37. doi:10.1029/2018sw001999
8. Hapgood M, Angling MJ, Attrill G, Bisi M, Cannon PS, Dyer C, et al. Development of space weather reasonable worst case scenarios for the UK national risk assessment. Maryland: Space Weather (2021).
9. Oughton EJ, Hapgood M, Richardson GS, Beggan CD, Thomson AWP, Gibbs M. A risk assessment framework for the socioeconomic impacts of electricity transmission infrastructure failure due to space weather: An application to the United Kingdom. Risk Anal (2018) 38(12):1022–43. doi:10.1111/risa.13229
10. Wintoft P, Wik M, Matzka J, Shprits Y. Forecasting Kp from solar wind data: Input parameter study using 3-hour averages and 3-hour range values. J Space Weather Space Clim (2017) 7:A29. doi:10.1051/swsc/2017027
11. Wintoft P, Wik M. Evaluation of Kp and Dst predictions using ACE and DSCOVR solar wind data. Space Weather (2018) 16(12):1972–83. doi:10.1029/2018sw001994
12. Tan Y, Hu Q, Wang Z, Zhong Q. Geomagnetic index Kp forecasting with LSTM. Space Weather (2018) 16(4):406–16. doi:10.1002/2017sw001764
13. Chakraborty S, Morley SK. Probabilistic prediction of geomagnetic storms and the Kp index. J Space Weather Space Clim (2020) 10:36. doi:10.1051/swsc/2020037
14. Gruet MA, Chandorkar M, Sicard A, Camporeale E. Multiple-hour-ahead forecast of the Dst index using a combination of Long Short-Term Memory neural network and Gaussian process. Space Weather (2018) 16(11):1882–96. doi:10.1029/2018sw001898
15. Siciliano F, Consolini G, Tozzi R, Gentili M, Giannattasio F, De Michelis P. Forecasting sym-H index: A comparison between long short-term memory and convolutional neural networks. Space Weather (2020) 18:e2020SW002589. Accepted Author Manuscript. doi:10.1029/2020SW002589
16. Shore RM, Freeman MP, Coxon JC, Thomas EG, Gjerloev JW, Olsen N. Spatial variation in the responses of the surface external and induced magnetic field to the solar wind. JGR Space Phys (2019) 124(7):6195–211. doi:10.1029/2019ja026543
17. King JH, Papitashvili NE. Solar wind spatial scales in and comparisons of hourly Wind and ACE plasma and magnetic field data. J Geophys Res (2005) 110(A2):A02104. doi:10.1029/2004ja010649
18. Finlay CC, Kloss C, Olsen N, Hammer MD, Tøffner-Clausen L, Grayver A, et al. The CHAOS-7 geomagnetic field model and observed changes in the South Atlantic anomaly. Earth Planets Space (2020) 72(1):156. doi:10.1186/s40623-020-01252-9
19. François C, et al. Keras (2015). Available at: https://keras.io.
20. Pedregosa F, Varoquaux G, Gramfort A, Michel V, Thirion B, Grisel O, et al. Scikit-learn: Machine learning in python. J Machine Learn Res (2011) 12(85):2825–30.
21. Hochreiter S, Schmidhuber J. Long short-term memory. Neural Comput (1997) 9(8):1735–80. doi:10.1162/neco.1997.9.8.1735
22. Camporeale E. The challenge of machine learning in space weather: Nowcasting and forecasting. Space Weather (2019) 17(8):1166–207.
23. Granat M. How to use convolutional neural networks for time series classification (2019). Retrieved from https://towardsdatascience.com/how-to-use-convolutional-neural-networks-for-time-series-classification-56b1b0a07a57 (Accessed Mar 25, 2021).
24. Thomson AWP, Dawson EB, Reay SJ. Quantifying extreme behavior in geomagnetic activity. Space Weather (2011) 9(10). doi:10.1029/2011sw000696
25. Dimmock AP, Rosenqvist L, Hall J-O, Viljanen A, Yordanova E, Honkonen I, et al. The GIC and geomagnetic response over Fennoscandia to the 7–8 September 2017 geomagnetic storm. Space Weather (2019) 17(7):2018SW002132–1010. doi:10.1029/2018sw002132
26. Werner ALE, Yordanova E, Dimmock AP, Temmer M. Modeling the multiple CME interaction event on 6–9 September 2017 with WSA-ENLIL+Cone. Space Weather (2019) 17(2):357–69. doi:10.1029/2018sw001993
27. Freeman MP, Forsyth C, Rae IJ. The influence of substorms on extreme rates of change of the surface horizontal magnetic field in the United Kingdom. Space Weather (2019) 17(6):827–44. doi:10.1029/2018sw002148
28. King J, Papitashvili N. Spdf - OMNIweb service (2021). [Website]. Retrieved from https://omniweb.gsfc.nasa.gov/html/omni_min_data.html (Accessed March 28, 2021).
29. Smith AW, Forsyth C, Rae IJ, Garton TM, Bloch T, Jackman CM, et al. Forecasting the probability of large rates of change of the geomagnetic field in the UK: Timescales, horizons, and thresholds. Space Weather (2021) 19(9). doi:10.1029/2021sw002788
30. Smith AW, Forsyth C, Rae IJ, Garton TM, Jackman CM, Bakrania M, et al. On the considerations of using near real time data for space weather hazard forecasting. Space Weather (2022) 20(7):e2022SW003098. doi:10.1029/2022sw003098
31. Pulkkinen A, Rastätter L, Kuznetsova M, Singer H, Balch C, Weimer D, et al. Community-wide validation of geospace model ground magnetic field perturbation predictions to support model transition to operations. Space Weather (2013) 11(6):369–85. doi:10.1002/swe.20056
32. Welling DT, Ngwira CM, Opgenoorth H, Haiducek JD, Savani NP, Morley SK, et al. Recommendations for next-generation ground magnetic perturbation validation. Space Weather (2018) 16(12):1912–20. doi:10.1029/2018sw002064
33. Turnbull KL, Wild JA, Honary F, Thomson AWP, McKay AJ. Characteristics of variations in the ground magnetic field during substorms at mid latitudes. Ann Geophys (2009) 27(9):3421–8. doi:10.5194/angeo-27-3421-2009
Keywords: forecasting geomagnetic storms, deep learning, ground magnetic field forecasting, LSTM network, CNN, space weather
Citation: Madsen FD, Beggan CD and Whaler KA (2022) Forecasting changes of the magnetic field in the United Kingdom from L1 Lagrange solar wind measurements. Front. Phys. 10:1017781. doi: 10.3389/fphy.2022.1017781
Received: 12 August 2022; Accepted: 12 October 2022;
Published: 28 October 2022.
Edited by:
Daniel Okoh, National Space Research and Development Agency, NigeriaReviewed by:
Hager Salah, Space Weather Monitoring Center (SWMC), EgyptValence Habyarimana, Mbarara University of Science and Technology, Uganda
Copyright © 2022 Madsen, Beggan and Whaler. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Frederik Dahl Madsen, Zi5kLm1hZHNlbkBzbXMuZWQuYWMudWs=