 Safaa Mosa
Safaa Mosa Mohamed El-Fakharany
Mohamed El-Fakharany Mervat Elzawy
Mervat Elzawy- 1Department of Mathematics, College of Science, University of Bisha, Bisha, Saudi Arabia
- 2Department of Mathematics, Faculty of Science, Damanhour University, Damanhour, Egypt
- 3Department of Mathematics, Faculty of Science, Tanta University, Tanta, Egypt
In this article, first, we give the definition of normal curves in 4-dimensional Galilean space G4. Second, we state the necessary condition for a curve of curvatures τ(s) and σ(s) to be a normal curve in 4-dimensional Galilean space G4. Finally, we give some characterizations of normal curves with constant curvatures in G4.
1. Introduction
Galilean geometry is one of the Cayley-Klein geometries whose motions are the Galilean transformations of classical kinematics [1]. The Galilean transformation group has an important place in classical and modern physics. It is well known that the idea of world lines originates in physics and was pioneered by Einstein. The world line of a particle is just the curve in space-time which indicates its trajectory [2].
In Euclidean 3-space E3, there are three types of curves, namely, osculating, rectifying, and normal curves [3]. The osculating curve in E3 is defined as a curve whose position vector always lies in its osculating plane, which is spanned by the tangent vector T and the normal vector N [3]. The rectifying curve in E3 is defined as a curve whose position vector always lies in its rectifying plane, which is spanned by the tangent vector T and the binormal vector B. Many researchers have investigated rectifying curves in Euclidean, Lorentz-Minkowski, and Galilean space, as can be seen in [4–6]. Similarly, a normal curve in E3 is defined as a curve whose position vector always lies in its normal plane, which is spanned by the normal vector N and the binormal vector B of the curve. Normal curves in n-dimensional Euclidean space was studied by Ozcan Bekats [7], framed normal curves in Euclidean space was studied by B.D. Yazici, S. O.Karakus, and M. Tosun [8], and normal curves on a smooth immersed surface was investigated by A.A. Shaikh, M.S. Lone, and P.R. Ghosh [9].
There are also many studies related to normal curves in non-Euclidean spaces, for example, normal curves and their characterizations in Lorentzian n-space was studied by Ozgür Boyacıoğlu Kalkan [10] and to the classification of normal and osculating curves in 3-dimensional Sasakian space was studied by M. Kulahck, M. Bahatas, and A. Bilici [11].
In recent years, researchers have begun to introduce curves and surfaces in Galilean and pesedo-Galilean spaces [12–24]. Normal and rectifying curves in Galilean G3 were obtained by Handan Oztekin [25]. Also, many studies about Galilean Geometry were found in Reference [1]. Frenet-Serret frame in the Galilean 4-space was constructed by S.Yilmaz [26].
In the present study, we considered a curve in Galilean 4-space G4 whose position vector satisfies the equation α(s) = λ(s)N(s) + μ1(s)B1(s) + μ2(s)B2(s) for differentiable functions λ(s), μ1(s), and μ2(s). N(s), B1(s), and B2(s) are normal, first binormal, and second binormal vectors of the curve in Galilean space G4. In the first part of the study, the necessary condition for a curve to be a normal curve was obtained; then, we considered a special case when the curvatures are constant and got the position vector of the normal curve in G4. At the end of the study, it can be seen that the normal curve in G4 lies on a sphere if constant, where τ and σ are the second and the third curvatures of the normal curve α(s).
2. Preliminaries
In this section, we will give some definitions considered in this study. Let and be two vectors in G4. The Galilean scalar product in G4 is defined by
The norm of the vector is given by
The cross product of any three vectors and in G4 is defined by the relation
where the unit vectors e1 = (1, 0, 0, 0), e2 = (0, 1, 0, 0), e3 = (0, 0, 1, 0), and e4 = (0, 0, 0, 1) [1].
A curve α : I ⊂ R → G4 of C∞ in the Galilean space G4 is defined by α(t) = (x(t), y(t), z(t), w(t)).
If the curve is parameterized by Galilean arc-length s, it is defined by α(s) = (s, y(s), z(s), w(s)).
The Frenet frame for the parameterized curve α(s) = (s, y(s), z(s), w(s)) in G4 is denoted by the following vectors
T(s) = α′(s) = (1, y′(s), z′(s), w′(s)),
B2(s) = ςT(s) × N(s) × B1(s),
Here, the coefficient ς is taken ±1 to make the determinant of the matrix [T, N, B1, B2] = 1.
where T(s), N(s), B1(s) and B2(s) are the tangent, normal, the first binormal, and the second binormal vectors of α(s). k(s) and τ(s) are the first and second curvatures, which are given by the following equations
The third curvature of the parameterized curve α(s) is denoted by . If the curvatures of α(s) are constants, the curve α(s) is called a W-curve. The set {T(s), N(s), B1(s), B2(s), k(s), τ(s), σ(s)} is called Frenet apparatus of the curve α(s). The vectors T(s), N(s), B1(s), and B2(s) are mutually orthogonal.
and
The derivatives of the Frenet equations are defined by [26].
3. Normal Curves in G4
In the following section, we will define the normal curves in Galilean 4-dimensional space and prove that there are no congruent curves to the normal curve α(s); finally, we will provide some characterizations of the normal curves in G4.
Definition 1. Let α : I ⊂ R → G4 be a parameterized curve in G4. A curve α(s) is called a normal curve if the orthogonal components of T(s) contains a fixed point for all s ∈ I.
In the following theorem, we indicate the position vector of the normal curve in Galilean 4-space G4.
Theorem 1. The position vector of the normal curve in G4 with curvatures k(s), τ(s), and σ(s) are defined if τ(s) and σ(s) satisfy the following equations:
Proof: The position vector of a normal curve in G4 is defined by
where λ(s), μ1(s), and μ2(s) are smooth functions of s.
By differentiating (Equation 3.1) with respect to s, we obtain
substituting Frenet (Equations 2.1) into Equation 3.2, we have
Hence, we have the following system of differential equations:
and
Since the curvature functions τ(s) and σ(s) must be differentiable functions, so we consider a set of differentiable functions, defined by
where Pn(s) denotes a polynomial function of degree n in s. Here, the curvature functions can be any function of , a linear combination or a product of these functions. It is said that annihilates the function ϒ(s) if . Here, all the member functions of have this property. Consequently, we have two linear differential operators, Φ(Ds) and Ψ(Ds), such that Φ(Ds){τ(s)} = 0 and Ψ(Ds){σ(s)} = 0, where , some of these annihilator operators are listed in Table 1. By applying the operator Θ(Ds) = Φ(Ds)Ψ(Ds) on Equation (3.4), we have
The operator Θ(Ds) annihilates the terms that contain λ(s) and μ2(s), i.e., the right hand side (RHS) of Equation (3.7) contains the derivatives of λ(s) and μ2(s) from order 1 to an order of less than the order of the derivative of μ1(s) by 1 at most. Let the maximum derivative in the left hand side (LHS) of Equation (3.7) be r + 1; then, its RHS can be written as a linear combination of the derivatives of τ(k)(s)λ(r − k)(s) and and k ∈ {0, 1, …, r − 1}, consequently, we have
where ar, k, br, k ∈ ℝ. Next by differentiating Equations (3.3) and (3.5), (r − 1 − k) times and applying Leibniz's rule, one gets
and
Applying Equations (3.9) and (3.10) into (3.8) yields
Equation (3.11) is a linear differential equation of order (r + 1) in μ1(s) with differential variable coefficients. Its general solution depends on the nature of the coefficients of its derivatives. However, the power series method can be applied to obtain its solution, especially, for any value of s ∈ ℝ is an ordinary point in all the coefficients of the derivatives , k = 0, 1, …, r.
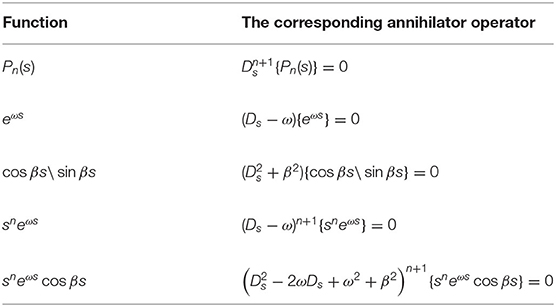
Table 1. Annihilator operators of some functions.
Next, we studied the case when τ(s) ∈ Pn(s) and σ(s) ∈ Pm(s). When r = max(m, n), then the annihilator operator is , , and consequently, was applied into Equation (3.7) by applying Leibniz's rule, yielding
By using Equations (3.9) and (3.10), Equation (3.12) becomes
Corollary 1. Let α(s) be a normal curve in G4. If the curvatures τ (s) and σ(s) ∈ P1(s), then the position vector of the normal curve in G4 is given by
where C1, C2, C3, cλ, and cμ2 are constants; the Fresnel functions, the generalized hypergeometric function,
and (β)n is the shifted factorial, defined by [27]
Proof: We consider a special case, when τ(s), σ(s) ∈ P1(s), i.e., τ(s) = a1s + b1, σ(s) = a2s + b2, then we have r = 1, and and the annihilate operator is (); by substituting into Equation (3.13), one gets
By extracting the summations, we have
By applying the power series method to solve Equation (3.15), where , differentiating it for up to three times, then substituting into Equation (3.15), and collecting the coefficients, one gets
where,
Finally, for a special case, when a1 = a2 = b1 = b2 = 1, the resultant differential equation is
which has the solution
It is worth noting that the generalized hypergeometric function is convergent, when p < q + 1, which holds in the proposed problem. Hence, we can obtain the functions λ(s) and μ2(s), by integrating Equations (3.3) and (3.5) with respect to s, respectively, then we have
and
Corollary 2. The position vector of the normal curve in G4 with constant curvatures τ and σ is given by
Proof: The position vector of a normal curve in G4 is defined by
where λ(s), μ1(s), and μ2(s) are differentiable functions of s.
By differentiating Equation (3.17) with respect to s, we obtain
Substituting Frenet Equations (2.1) into Equation (3.18), we have
Hence, we obtain the following differential equations:
If we take the normal curve α(s) with constant curvatures τ and σ, the Equations (3.19) will take the form
By differentiating the second equation of the Equation (3.20) and substituting the first and the third Equation of (3.20), we obtain the following differential equation
By solving the ordinary differential Equation (3.21), we obtain
where c1, c2, c3 and c4 are constants.
In the following corollary, we give some characterizations for the curve to be a normal curve.
Corollary 3. Let α(s) be a normal curve in Galilean 4- space G4 with non-zero constant curvatures τ and σ. The following statements are satisfied.
1. < + c3,
2. <
3. < + c4,
where c1, c2, c3, and c4 are constants.
Proof: Suppose that α(s) is a normal curve in Galilean 4-space G4 with non-zero constant curvatures τ and σ, then α(s) can be written in the form
α
Taking the inner product of the two sides with N(s), B1(s), and B2(s), the statements are held.
In the following theorem, we prove that, if α(s) is a normal curve, there are no curves which are congruent to α(s).
Theorem 2. Let α(s) be a normal curve in Galilean space G4 with non-zero constant curvatures τ and σ. Then, there are no curves which are congruent to α(s).
Proof: First, let us define m(s) as follows
Taking the derivative of Equation (3.25) for both sides, we obtain
By substituting from Equations (2.1), (3.22)–(3.24).
m′(s) does not equal to zero, which means that m(s) is not a constant vector. So, α(s) is not congruent to a normal curve.
In the following theorem, we give the necessary condition for the normal curve in Galilean 4-space to lie on a sphere.
Theorem 3. Let α(s) be a normal curve in Galilean 4-space G4 with non-zero constant curvatures τ and σ. Then, α(s) lies on a sphere if , where c3 and c4 are the constants in equations (3.23) and (3.24).
Proof: The inner product of the position vector of α(s) is defined by
g( α(s), α(s)) = < α(s),
By simple computations, we have
< α(s),
If , then < α(s), , which means that α(s) lies on a sphere.
4. Conclusion
In this study, we established the definition of the normal curve in Galilean 4- space G4. Also, we derived the necessary condition for a curve to be a normal curve in G4. We have proved that, if α(s) is a normal curve in G4 with constant curvatures, there is no curve which is congruent to α(s). In the end, the necessary condition for a normal curve to lie on a sphere has been obtained.
Data Availability Statement
The original contributions presented in the study are included in the article/supplementary materials, further inquiries can be directed to the corresponding author/s.
Author Contributions
All authors listed have made a substantial, direct and intellectual contribution to the work, and approved it for publication.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Acknowledgments
The authors wish to express their sincere thanks to referee for making several useful comments that improved the first version of the paper.
References
1. Yaglom IM. A Simple Non-Euclidean Geometry and Its Physical Basis. New York, NY: Springer-Verlag (1979).
2. Epstein M. Differential Geometry Basic Notions and Physical Examples. Switzerland: Springer International Publishing (2014).
3. Docarmo MP. Differential Geometry of Curves and Surfaces. Rio de Jaeiro: Instituto de Matematica Pure e Aplicada (IMPA) (1976).
4. Cambie S, Goemans W, Bussche IV. Rectifying curves in the n-dimensional Euclidean space. Turk J Math. (2016) 40:210–23. doi: 10.3906/mat-1502-77
5. Ilarslan K, Nesovic E, Torgasev MP. Some Characterizations of rectifying curves in the Minkowski 3- space. Novi Sad J Math. (2003) 33:23–32.
6. Lone MS. Some characterizations of rectifying curves in four dimensional Galilean space G4. Glob J Pure Appl Math. (2017) 13:579–87.
7. Bektas O. Normal curves in n-dimensional Euclidean space. Adv Diff Equat. (2018) 2018:456. doi: 10.1186/s13662-018-1922-2
8. Yazici BD, Karakus SO, Tosun M. Framed normal curves in Euclidean space. Tbilisi Math. J. (2021) 27–37. doi: 10.2478/9788395793882-003
9. Shaikh AA, Lone MS, Ghosh PR. Normal curves on a smooth Immersed surface. Ind J Pure Appl Math. (2020) 51:1343–55. doi: 10.1007/s13226-020-0469-6
10. Kalkan OB. On normal curves and their characterizations in Lorentzian n-space. AIMS Math. (2020) 5:3510–24. doi: 10.3934/math.2020228
11. Kulahci MA, Bektas M, Bilici A. On classification of normal and osculating curve in 3-dimensional Sacakian space. Math sci Appl E-Notes (2019) 7:120–27. doi: 10.36753/mathenot.521075
12. Abdel-Aziz HS, Saad MK. Darboux frames of bertrand curves in the Galilean and Pseudo-Galilean spaces. JP J Geometry Topol. (2014)16:17–43.
13. Dede M, Ekici C. On parallel ruled surfaces in Galilean space. J Math. (2016) 40:47–59. doi: 10.5937/KgJMath1601047D
14. Aydin ME, Ogrenmis AO. Spherical product surfaces in the Galilean space. J Math. (2016) 4:290–8.
16. Dede M, Ekici C, Coken A. On the parallel surfaces in Galilean space. J Math Stat. (2013) 42:605–15. doi: 10.15672/HJMS.2014437520
17. Elzawy M, Mosa S. Smarandache curves in the Galilean 4-Space G4. J Egypat Math Soc. (2017) 25:53–6. doi: 10.1016/j.joems.2016.04.008
18. Elzawy M, Mosa S. Quaternionic bertrand curves in the Galilean space. Filomat. (2020) 34:59–66. doi: 10.2298/FIL2001059E
19. Bektas M, Ergut M, Ogrenmus AO. Special curves of 4D Galilean space. Int J Math Eng Sci. (2013) 2. doi: 10.1155/2014/318458
20. Oztekin H, Tatlipinar S. Determination of the position vectors of curves from Intrinsic Equations in G3. J Sci Tech. (2014) 11:1011–1018. doi: 10.14456/372
21. Elzawy M. Hasimoto surfaces in Galilean space G3. J Egypat Math Soc. (2021) 29:1–9. doi: 10.1186/s42787-021-00113-y
22. Yoon DW, Lee JW, Lee CW. Osculating curves in the Galilean 4- space. Int J Pure Appl Math. (2015) 100:497–506. doi: 10.12732/IJPAM.V100I4.9
23. Elzawy M, Mosa S. Razzaboni surfaces in the Galilean Space G3, far east. J Math Sci. (2018) 108:13–26. doi: 10.17654/MS108010013
24. Mosa S, Elzawy M. Helicoidal surfaces in Galilean Space with density. Front. Phys. 8:81. doi: 10.3389/fphy.2020.00081
26. Yılmaz S. Construction of the Frenet-Serret frame of a curve in 4D Galilean space and some applications. Int J Phys Sci. (2010) 5:1284–9.
Keywords: normal curves, Galilean space, curvatures, W-curve, Frenet apparatus
Citation: Mosa S, Fakharany M and Elzawy M (2021) Normal Curves in 4-Dimensional Galilean Space G4. Front. Phys. 9:660241. doi: 10.3389/fphy.2021.660241
Received: 29 January 2021; Accepted: 18 March 2021;
Published: 24 June 2021.
Edited by:
Yang-Hui He, City University of London, United KingdomCopyright © 2021 Mosa, El-Fakharany and Elzawy. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mervat Elzawy, bWVydmF0ZWx6YXd5QHNjaWVuY2UudGFudGEuZWR1LmVn; bXJ6YXd5QHRhaWJhaHUuZWR1LnNh
†Present address: Mohamed El-Fakharany, Mathematics and Statistics Department, College of Science, Taibah University, Yanbu, Saudi Arabia
Mervat Elzawy, Mathematics Department, College of Science, Taibah University, Medina, Saudi Arabia