 Prasantha Bharathi Dhandapani
Prasantha Bharathi Dhandapani Dumitru Baleanu
Dumitru Baleanu Jayakumar Thippan
Jayakumar Thippan Vinoth Sivakumar
Vinoth Sivakumar- 1Department of Mathematics, Sri Ramakrishna Mission Vidyalaya College of Arts and Science, Coimbatore, India
- 2Department of Mathematics, Cankaya University, Ankara, Turkey
- 3Institute of Space Sciences, Măgurele, Romania
This paper constructs the numerical solution of particular type of differential equations called fuzzy hybrid retarded delay-differential equations using the method of Runge-Kutta for fourth order. The concept of fuzzy number, hybrid-differential equations, and delay-differential equations binds together to form our equations. An example following the algorithm is presented to understand the Concept of fuzzy hybrid retarded delay-differential equations and its accuracy is discussed in terms of decimal places for easy understanding of laymen.
1. Introduction
In this manuscript a system is modeled with the concept of retarded delay differential equation and we study it using fuzzy numbers. Nowadays hybrid systems play a vital role in communication systems and retard delay differential equation was considered to be unavoidable in modeling any biological models. In this paper these two separate mathematical concepts were combined under one roof called fuzzy. We call these system of differential equation as fuzzy hybrid retarded delay differential equations (FHRDDE).
The basic properties of fuzzy sets, fuzzy differential equations, fuzzy mappings were studied by various authors [1–7]. We recall that Pederson and Sambandham [8], Abbasbandy and Allahviranloo [9], Al Rawi et al. [10], Bellan and Zennaro [11], and Jayakumar et al. [12] have treated the hybrid, fuzzy, delay, fuzzy delay differential equation numerically, respectively. Prasantha Bharathi et al., studied various types of fuzzy delay differential equations in Prasantha Bharathi et al.[13, 14]. Different methods were used by some authors for solving Hybrid fuzzy differential equations without delay like [15] and [16]. Besides, L.C. Barros regularly studied fuzzy differential equations [15, 17–19]. In Pederson and Sambandham [8], the authors defined and solved the problem of hybrid fuzzy IVP. We extended this hybrid fuzzy IVP to fuzzy hybrid retarded delay IVP. In addition to that of hybrid term Λ(zH(t)), the retarded delay term zH(t − δ) is also used. So, there occurs some changes in the Runge-Kutta method which can be seen by comparing section 3 with Pederson and Sambandham [8].
The organization of the manuscript is given below. The section 2 treats the fuzzy hybrid retarded delay-differential systems. The section 3 shows the method of Runge-Kutta for fourth order (R-K-4) for dealing a FHRDDE and the section 4 holds algorithm and numerical example to prove the theory.
2. Fuzzy Hybrid Retarded Delay-Differential Systems
According to Al Rawi et al. [10] the retarded delay differential equations are defined in the form of a0DzH(t) + b0zH(t) + b1zH(t − δ) = f(t). When f(t) = 0, it becomes homogeneous for every first order delay differential equation. Here we take f(t) as hybrid term and it was termed as hybrid retarded delay differential equations where the constants are given by a0 = 1, b0 = − 1, b1 = − 1, f(t) = Λ(zH(t)). Throughout the paper any function of the form fH(t) represents the hybrid function satisfying the properties of fuzzy set proposed by Zadeh as followed by Pederson and Sambandham [8] defined over the hybrid term Λ(zH(t)) and delay term zH(t − δ).
Let us consider the following FHRDDE for α ∈ [0, 1]
where Λ(zH(t)) is the hybrid function and zH(t − δ) is the delay function involving the delay term δ. More over the Hybrid function is the function involving two or more sub functions acting differently in specific interval defined over the main functions interval. i.e., The sub functions of main function acts differently in the different sub intervals of main function's domain. In the numerical example below, we have taken the hybrid function Λ(zH(t)) = m(t).Λ(z(t)) where m(t) and Λ(z(t)) will vary for different values defined over the interval t ∈ [t0, tn]. The delay term δ varies in the interval (t0, tn]. zH(t) = ϕ(t) is the initial function and zH(t0) = z0 = ϕ(t0) is the initial value defined at t0. It is obvious that
It follows that for . Now we can define the above fuzzy valued function DzH(t) i.e., as follows
for zH ∈ E with α- level sets
for t ∈ I and 0 ≤ α ≤ 1.
3. Fourth-Order Fuzzy Type Runge-Kutta Method (R-K-4)
We recall that the R-K-4 plays a vital role in solving differential equations. Also, it holds good for any dynamical system involving delay differential equations. We use the R-K-4 for a FHRDDE (1). Here we use a new simplified form of R-K-4. We define
where w1, w2, w3, and w4 are simple constants and
Such that,
where,
Next we define the followings
The exact solution at tn + 1 is given by
The approximate solution has the following form
where P and Q are given by
and
respectively.
4. Algorithm and the Numerical Example
This section consists of an algorithm followed by an example to understand the proposed theory.
Algorithm (R-K-4):
Step:1 Fix N=10,
Step:2 Calculate h by
Step:3 Set ti = i*h for i = 0, 1, …, n and compute z(ti).
Step:4 Take t0 as initial point and z0 as the initial value.
Step:5 Compute K1, K2, K3, K4, z(ti) using Runge-Kutta method, explained in previous section.
Step:6 Calculate the upcoming iterations using z(ti+1) = z(ti) as described in previous section.
Step:7 Repeat the steps, Step:2, Step:4 and Step:5 for ti ≤ tn.
Step:8 Quit the process at ti > tn.
The Numerical Example
Consider the FHRDDE, extended from Pederson and Sambandham [8], namely
The hybrid function is defined as Λ(zH(t)) = m(t).Λ(z(t)) as mentioned in section 2 where,
Then the above Equation (6)
The exact solution of (7) is given by
where
Let and,
The approximate solution is given by
where the coefficients are written as
Consider another t ∈ [t0, tn], i.e., t ∈ [0, 3], h = 0.1 Set n = 10t and zH(10t) = zH(n).
5. Conclusion
We have used the R-K-4 method to find the numerical solution of FHRDDE. We presented the Table 1 only for t = 3, h = 0.1 for α ∈ [0, 1]. The values of zH for t ∈ [0, 3] are plotted in Figure 1 for α = 1 and in Figure 3 for α ∈ [0, 3]. The comparison of the solutions represented in Figure 1 for non-fuzzy IVP and the Figure 2 for fuzzy IVP prove the accuracy of R-K-4 with that of the exact solution. From the Table 1 we can conclude that the accuracy of the method proposed is about four decimal places. Also if we increase the order of the Runge-Kutta method the accuracy of our numerical solutions will increase. The analytical and numerical results obtained by this paper ensures the hybrid system with time lag (delay) can be solved. Thus, we can solve properly any FHRDDE using the R-K-4 method. We followed [10] to write the retarded delay differential equation in regular homogeneous form and we added a hybrid term to make it as non-homogenous equation which in turn makes our governing Equation 1 as the hybrid fuzzy retarded delay differential equation. Thus, our results differ from results on the delay papers like [11, 12] or as in hybrid papers like [8, 20]. There are differences between the traditional Runge-Kutta methods presented in Pederson and Sambandham [8] and the reported method because in our case the Runge-Kutta method involves both hybrid and retarded delay term. The previously published papers varies only the hybrid term in regular intervals. However, we constructed a system in which both hybrid term Λ(zH(t)) and delay term zH(t − δ) are subject to vary in some regular intervals. We also generalized the numerical solution which will provide very closer solution for any values in the given intervals. In the above example, we have taken and as our fuzzy numbers. But one can choose different fuzzy numbers with in the interval α ∈ [0, 1]. In all the cases the non-member, partial member and the full member of both approximate and analytical solution will coincide as they are defined in [0 ≤ α ≤ 1]. According to our knowledge the researchers working with the numerical solutions of hybrid systems like [8, 20] did not considered the system with time lag. In this paper we solved the hybrid system with time lag and we open a gate for the related future research in areas like communication systems and signal processing.
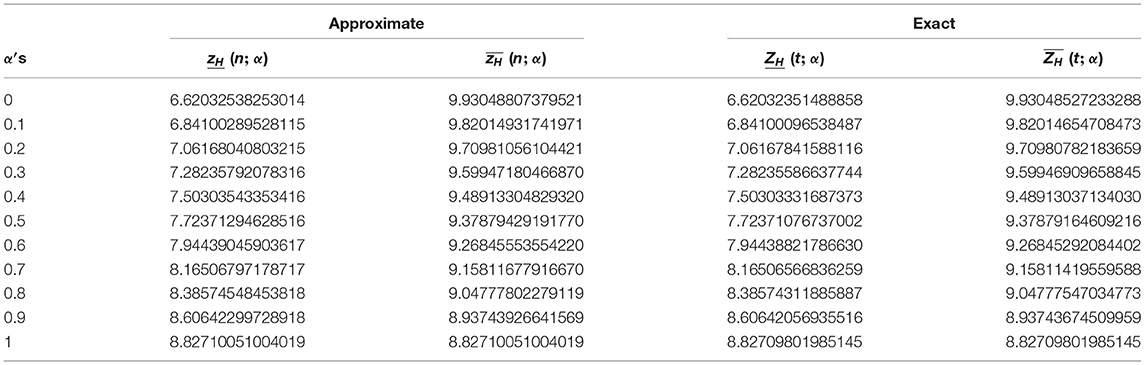
Table 1. Comparing the exact and the approximate solution.
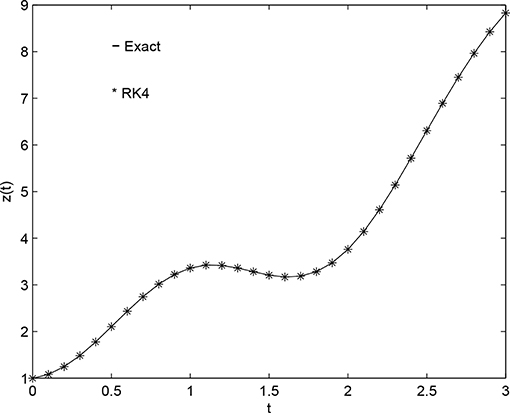
Figure 1. Comparing approximate solution with the exact solution (for h = 0.1, α = 1 at t ∈ [0, 3]).
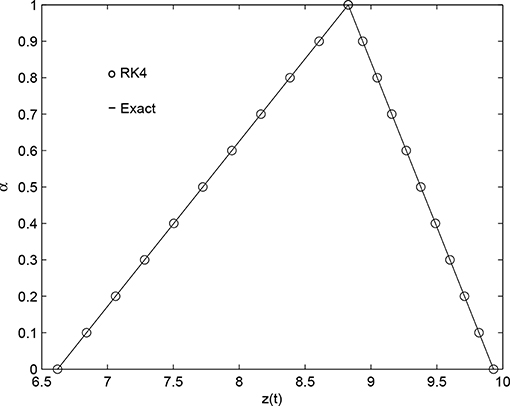
Figure 2. Comparing the approximate solution with the exact solution (for h = 0.1, α ∈ [0, 1] at t = 3).
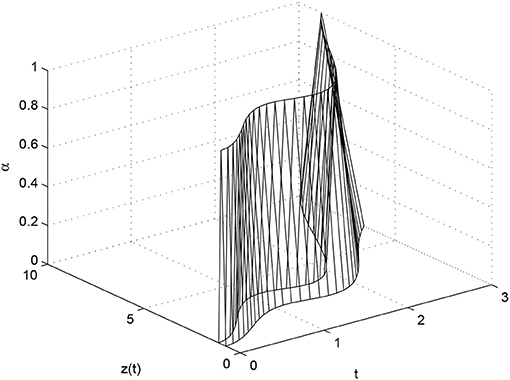
Figure 3. Approximate solution by R-K-4 (for h = 0.1, α ∈ [0, 1] for t ∈ [0, 3]).
Data Availability Statement
All datasets generated for this study are included in the article/supplementary material.
Author Contributions
PD formulated the problem, converted it into fuzzy functions, and solved the problem analytically. DB solved the problem numerically and carefully proof-read the whole paper. JT generalized both numerical and exact solutions. VS plotted all the three graphs for various values. All the authors equally typeset their parts in the journal template and checked the final version of the manuscript.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Acknowledgments
The authors would like to thank the reviewers for their kind suggestions toward the improvement of the paper.
References
1. Goetschel R, Voxman W. Elementary fuzzy calculus. Fuzzy Sets Syst. (1986) 18:31–43. doi: 10.1016/0165-0114(86)90026-6
2. Kaleva O. Fuzzy differential equations. Fuzzy Sets Syst. (1987) 24:301–17. doi: 10.1016/0165-0114(87)90029-7
4. Seikkala S. On the fuzzy initial value problem. Fuzzy Sets Syst. (1987) 24:319–30. doi: 10.1016/0165-0114(87)90030-3
5. Lupulescu V. On a class of fuzzy functional differential equations. Fuzzy Sets Syst. (2009) 160:1547–62. doi: 10.1016/j.fss.2008.07.005
6. Dubois D, Prade H. Towards fuzzy differential calculus, Part 3. Differentiation. Fuzzy Sets Syst. (1982) 8:225–33. doi: 10.1016/S0165-0114(82)80001-8
7. Chang SL, Zadeh LA. On fuzzy mapping and control. IEEE Trans Syst Man Cybern. (1972) 2:30–4. doi: 10.1109/TSMC.1972.5408553
8. Pederson S, Sambandham M. The Runge-Kutta method for hybrid fuzzy differential equations. Nonlinear Anal Hybrid Syst.(2008) 2:626–34. doi: 10.1016/j.nahs.2006.10.013
9. Abbasbandy S, Allahviranloo T. Numerical solution of fuzzy differential equation by Runge-Kutta Method. Nonlinear Stud. (2004) 11:117–29.
10. AL Rawi SN, Salih RS, Mohammed AA. Numerical Solution of Nth order linear delay differential equation using Runge-Kutta method. Um Salama Sci J. (2006) 3:140–6.
11. Bellen A, Zennaro M. Numerical methods for delay differential equations. In: Golub GH, Schwab CH, Light WA, Suli E, editors. Numerical Mathematics and Scientific Computation. Oxford: Oxford Science Publications; Clarendon Press (2003). p. 1–10; 63-70.
12. Jayakumar T, Parivallal A, Prasantha Bharathi D. Numerical solutions of Fuzzy delay differential equations by fourth order Runge Kutta Method. Adv Fuzzy Sets Syst. (2016) 21:135–61. doi: 10.17654/FS021020135
13. Prasantha Bharathi D, Jayakumar T, Vinoth S. Numerical solution of fuzzy pure multiple retarded delay differential equations. Int J Res Advent Technol. (2018) 6:3693–8.
14. Prasantha Bharathi D, Jayakumar T, Vinoth S. Numerical solution of fuzzy pure multiple neutral delay differential equations. Int J Adv Sci Res Manage. (2019) 4:172–8.
15. Paripour M, Hajilou E, Hajilou A, Heidari H. Application of Adomian decomposition method to solve hybrid fuzzy differential equations. J Taibah Univ Sci. (2015) 9:95–103. doi: 10.1016/j.jtusci.2014.06.002
16. Sepahvandzadeh A, Ghazanfari B. Variational Iteration Method for solving Hybrid Fuzzy differential equation. J Math Extens. (2016) 10:76–85.
17. de Barros LC, Pedro FS. Fuzzy differential equations with interactive derivative. Fuzzy Sets Syst. (2017) 309:64–80. doi: 10.1016/j.fss.2016.04.002
18. Barros LC, Gomes LT, Tonelli PA. Fuzzy differential equations: an approach via fuzzification of the derivative operator. Fuzzy Sets Syst. (2013) 230:39–52. doi: 10.1016/j.fss.2013.03.004
19. Mizukoshi MT, Barros LC, Chalco-Cano Y, Roman-Flores H, Bassanezi RC. Fuzzy differential equations and the extension principle. Inform Sci. (2007) 177:3627–35. doi: 10.1016/j.ins.2007.02.039
Keywords: hybrid, fuzzy, retarded delay, differential equations, numerical solutions, fourth order, Runge-Kutta Method
Citation: Dhandapani PB, Baleanu D, Thippan J and Sivakumar V (2019) Fuzzy Type RK4 Solutions to Fuzzy Hybrid Retarded Delay Differential Equations. Front. Phys. 7:168. doi: 10.3389/fphy.2019.00168
Received: 24 September 2019; Accepted: 11 October 2019;
Published: 25 October 2019.
Edited by:
Jesus Martin-Vaquero, University of Salamanca, SpainReviewed by:
Haci Mehmet Baskonus, Harran University, TurkeyAndreas Gustavsson, University of Seoul, South Korea
Copyright © 2019 Dhandapani, Baleanu, Thippan and Sivakumar. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Prasantha Bharathi Dhandapani, ZC5wcmFzYW50aGFiaGFyYXRoaUBnbWFpbC5jb20=